轮式装载机工作装置的仿真分析
纯电动轮式装载机动力系统的仿真与研究

《装备制造技术》2018年第03期0前言随着能量消耗的不断增加,特别是空气污染的日趋严重,节能减排已成为当今中国最为迫切解决的问题之一。
工程机械作为大排放机械,技能减排势在必行。
因此,纯电动装载机应运而生。
纯电动装载机是指将动力电池或网电等作为能量源为整机提供动力以驱动整机作业行驶的机型。
目前,纯电动装载机多为单一的蓄电池来提供动力,但是蓄电池作为唯一的动力来源有很多缺陷:①蓄电池对温度比较敏感,给使用着带来诸多不便;②蓄电池的有限循环寿命,增加了使用者更换电源的费用;③废旧电池的环保问题。
超级电容作为新型的能源,它拥有蓄电池所不具备的优点:①有非常高的功率密度;②充电速度快;③循环寿命长,半永久性使用无需更换;④效率高;⑤低温性能优越[1]。
因此将超级电容作为辅助电源与动力电池组成联合体共同工作,组成蓄电池-超级电容的复合系统既可以将蓄电池的高比能量和超级电容的高比功率的优点结合到一起,又可以降低电动车辆对蓄电池大功率放电的限制要求,使系统同时满足动力性、经济性的要求,并对蓄电池起保护作用,大大延长蓄电池循环使用寿命,提高电动汽车的实用性,极有发展前途。
本文的研究为纯电动装载机单一电源和复合电源的比较,为现阶段纯电动装载机的研发提供一定的借鉴,复合电源的纯电动装载机相对于单一电源的纯电动装载机更有价值。
1复合动力系统装载机的结构复合动力系统装载机在动力系统与纯电动装载机有一定的区别,其储能装置是由蓄电池和超级电容联合提供。
超级电容与蓄电池构成的复合电源系统的拓扑结构主要有四种:①超级电容与蓄电池直接并联;②电源复合结构为蓄电池与DC/DC 变换器串联,然后再与超级电容并联;③电源复合结构为超级电容与DC/DC 变换器串联,然后与蓄电池并联;④超级电容、蓄电池均与DC/DC 变换器串联[2]。
综合比较,复合电源结构宜采用图1结构,如图1所示,超级电容与DC/DC 变换器串联后与蓄电池并联,蓄电池直接对外输出功率的方式提高了能量利用效率,超级电容通过DC/DC 变换器跟踪监测蓄电池组端电压,并调节自身电压,该种复合电源系统易于控制。
基于Matlab的轮式装载机工作装置性能分析
.
南 京理 工 大 学 机 械 工 程 学 院 南 京
2 10 0 9 4
)
1
引
言
一
U G7=
a r c c o s
(
轮式 装 载机 是
、
种广泛应 用 于 公路 铁路 建筑 水
、 、
、
半
。
)
;' 山 等 建设 工 程 的 土 石 方 施 工 机 械
、 、 、
。
由 于 其 具 有作 业
。
。 。
一
前车轮轮胎 半径
最 小卸
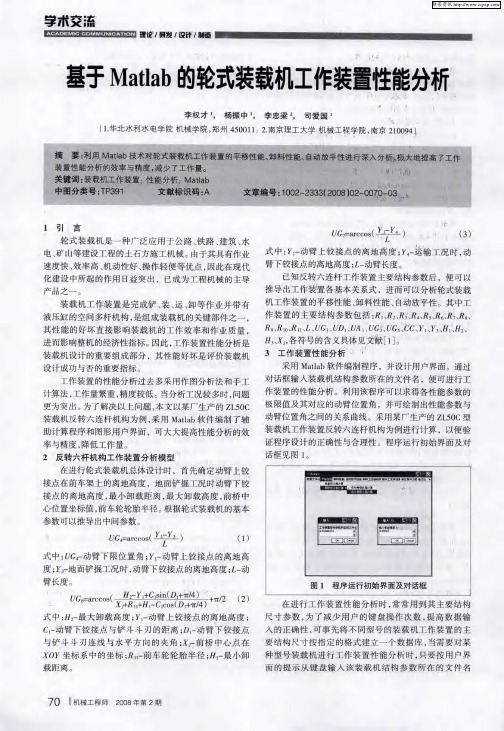
种 型号装载机进行工 作装置 性能分析时 只要按 用 户界
面 的提示 从键 盘 输 人 该 装载机 结 构参数所 在 的文 件 名
载距 离
70
l
机械工 程 师
2008
年第 2 期
维普资讯
字木 交 i 赢
理论 , 发 , 研 设计 , 嗣量
维普资讯
字 木交 ; 赢
理 论 /研 发 , 计 , 造 设 褥
基于 M a t l a b 的轮 装载机工作装置性能分析 式
‘
、
李权 才
.
‘
,
杨振 中
’
,
李 忠梁
;
:
,
司 爱国
,
( 1 华 北 水 利 水 电学 院 机 械 学 院 郑 州
,
4500 11
2
称, 程序便将文件 中的数据 自动调入内存 中进行分析与
计算 。 其 输入 数据 文件 的 的格式 如下 所示 :
RlR2R R4 5R6 8 9 1、 I、 、 、 、 、 、 、 、 【 1 )
UGl U l U 、 、 D 、 A l UG3 UG5 CC 、 、
装载机工作装置的建模与仿真分析_段楠
70
第 28 卷第 5 期
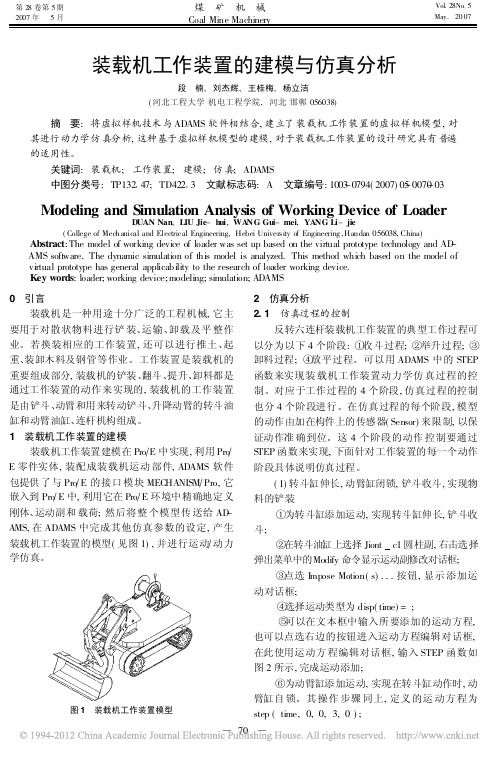
装载机工作装置的建模与仿真分析 段 楠, 等
Vol 28No 5
进行 3 s, 步长为 0. 01 s 的动态仿真分析, 此 阶段运行后的模型如图 3 所示。
step( time, 0, 0, 3, 2. 5) + step( time, 3, 0, 7, 0) + step( time, 7. 1, 0, 10, - 4. 5) ;
进行运行时间为 15 s, 步长为 0. 01 s 的仿真 分析, 在第 4 阶段运行后动臂、摇臂、铲斗都回到初 始位置, 其状态如图 6 所示。
图 4 举升状态
( 3) 转斗缸收缩, 动臂缸闭锁, 铲斗翻转, 实现 物料的卸载
为转斗缸添加运动, 使转斗缸伸长, 实现在转 斗的翻转。添加的运动方程为
( 1) 转斗缸伸长, 动臂缸闭锁, 铲斗收斗, 实现物 料的铲装
为转斗缸添加运动, 实现转斗缸伸长, 铲斗收 斗;
在转斗油缸上选择 Jiont c1 圆柱副, 右击选择 弹出菜单中的Modify 命令显示运动副修改对话框;
点选 Impose Motion( s) . . . 按钮, 显示 添加运 动对话框;
缸自锁。添加的运动方程为 step ( t ime, 0, 0, 3, 2.
5) + step ( t ime, 3, 0, 7, 0 ) ; 进行运行时间为 7 s, 步长为 0. 01 s 的仿真分
析, 在第 2 阶段运行后动臂、摇臂、铲斗所处的位置 如图 4 所示。
图 5 卸载状态
( 4) 转斗缸收缩, 动臂缸收缩, 动臂下降, 铲斗 自动放平, 自动进入下一次铲掘状态
紧钢丝绳而使输送带拉紧; 拉力传感器将张紧力的变化传给压力控制器; 压力控制器将压力信号转换为电信
ZL30轮式装载机总体及工作装置设计毕业设计
b.“V”形作业法:运输车与工作面成60度的角度,装载机装满铲斗后,在倒车驶离工作面的过程中,并调转驶向料堆,进入下一次的作业循环。
这种作业方式可以得到较短的工作循环时间,故应用十分广泛。
c.“L”形作业法:运输车垂直于工作面,装载机铲装物料后,倒退并翻转90°,然后向前驶向料堆进行下次铲装。
这种作业方式在运距较短时,一个司机可轮换在两辆运输车上工作,以减少人力。这种作业方式适用宽广的作业场合。
国产装载机型号标记的第一个字母Z,代表装载机,Z后面的数字代表额定装载重量。为了区别履带式和轮胎式装载机,轮胎式装载机型号标记要在字母Z和数字之间加字母L,如ZL30型装载机,代表额定载总量为3t的轮胎式装载机。装载机的型号表示方法见表1-1。
Key words:loader;work device;connecting rod;bucket
前言
装载机是一种作业效率高且用途广泛的工程机械,可以对散状物料进行铲装、搬运、卸载及平整作业,还可以进行轻度的铲掘工作,若更换换装相应的工作装置,还可以可以进行推土、起重装卸木料及钢管等作业。因此,它被广泛应用于建筑、铁路、公路、水电、港口、矿山、农田基本建设及国防等工程。对于加快工程建设速度、减轻劳动强度、提高工程质量、降低工程成本都发挥着重要作用,因此近几年来无论在国内还是在国外装载机品种和产量都得到迅速发展,成为工程机械的重要机种之一。在近20年内,我国装载机从无到有,并形成了独立的系列,通过实践证明,从整机性能结构形式及主要参数如:牵引性、动力性、机动性、稳定性、操纵性、及单位自重功率、单位斗容功率和单位载重量等综合技术指标来看,已接近或达到国外水平。但由于各种原因,产品的质量与先进的工业国家相比还有一定的差距。近期装载机在结构上没有重大的突破,但有不少的改进。目前国内轮式装载机的发展趋势:
装载机工作装置的实体建模和运动仿真

5. 生成特殊连接
分析运动机构
设置运动环境
1. 应用伺服电动机 2. 应用弹簧 3. 应用阻尼器 4. 应用执行电动机 5. 定义力/力矩负荷
1. 运行运动学分析 2. 运行动态分析 3. 运行静态分析 4. 运行力平衡分析
5. 运行重复组件分 析
获取分析结果
1. 回放结果 2. 检查干涉 3. 查看定义的测
几方面的分析:
1 铲斗斗尖位置分析
2 工作装置铰点处运动分析
3 铲斗运动分析
4.5 工作装置干涉检测
在回放中进行碰撞干涉检 测,如果杆件在运动中出现干 涉,“Proe/E” 就会提示,并将 干涉区加亮显示, 以便设计者 检查修改。通过“ Proe/E” 环 境中的全局干涉检查判断ZL50 装载机工作装置干涉问题,经 过检查,ZL50 装载机工作装置 在铲斗收斗时由于收斗角过大 造成后挡板与摇臂产生轻微的 干涉,通过调整翻斗油缸的伸 长长度后,工作装置不存在干 涉情况。最后可以通过扑捉动 态模拟过程,制作成一个动画 影片。
在机构上定义重力、力和力矩、弹簧、阻尼等特征。可以对机构设置材料、
密度等基本属性特征,使其更加接近现实中的机构,达到真实模拟现实的
目的。
做完一个机构动态分析后就可以进行结果回放,检测干涉,捕捉
机构运动仿真动画,所需数据的测量对机构的合理性进行检验,是否满足
设计要求。根据设计任务书的要求,
需要对工作装置做如下
Pro/E提供了十种 连接定义。主要有刚性连 接,销钉连接,滑动杆连 接,圆柱连接,平面连接, 球连接 焊接,轴承,一般, 6DOF(自由度)。
Company Logo
Company Logo
4.3用Pro/E做机械动态分析的一般流程
ZL50轮式装载机虚拟样机建模与仿真探讨

ZL50轮式装载机虚拟样机建模与仿真探讨文章以ZL50轮式装载机为对象,在分析其牵引性能的基础上,通过在ADAMS软件中建立动力学模型,应用现代计算机虚拟仿真技术,形成装载机的虚拟样机系统,然后进行初步的性能仿真试验和参数优化,为装载机的不断完善提供方法和依据。
通过文章的探讨,以期对相关人员的工作提供参考。
标签:轮式装载机;动力学系统;虚拟分析引言轮式装载机是一种通过安装在前端一个完整的铲斗支承结构和连杆,随机器向前运动进行装载或挖掘,以及提升、运输和卸载的轮胎机械,广泛用于公路、建筑、矿山等工程领域,对于减轻劳动强度,加快工程建设速度,提高工程质量起着重要的作用。
虚拟样机技术作为一种技术手段,在汽车工业里面被普遍采用,通过相应系统进行仿真,可以达到评价汽车操作稳定性和耐久性的目的。
轮式装载机属于循环式作业机械,对其研究目前仍存在不足之处,通过虚拟样机技术来对轮式装载机进行性能仿真试验和参数优化,不失为一种解决问题的方法。
文章主要针对ZL50轮式装载机作为研究对象进行建模与分析,其具体参数如表1所示。
1 ZL50轮式装载机动力学建模由于ZL50轮式装载机是一个非常复杂的多体系统,因此通过建立装载机模型的方式研究各个系统综合性能是一种有效的方法。
虚拟样机在构造上是与实际装载机动力学行为相似的等价模型,该等价模型在物理性能上等同或十分相似于实际系统,但比实际的装载机更简单和便于分析研究。
目前机械系统动力学仿真分析软件较多,基于ADAMS能有效地分析三维机构的运动与力,可模拟大位移的系统和能够分析运动学静定系统,故采用ADAMS来对ZL50轮式装载机进行动力学建模与分析。
以下是在ADAMS操作环境下建立的动力学模型。
2 ZL50轮式装载机动力学仿真纵向稳定度是评价装载机技术性能的重要指标之一,它表明装载机在行驶或工作时抵抗翻车的能力。
ZL50轮式装载机主要在满载上坡动臂伸出最大或满载下坡行驶时或空载上坡运行时容易产生倾翻。
装载机工作装置建模与动态分析机械工程和自动化专业

装载机工作装置建模与动态分析摘要现如今,在各种类型的工程机械中,应用尤为广泛的即为装载机,其将可有效提高现有的工程进度,并尽可能降低不必要的劳动强度,持续优化当前的工程质量。
本次研究用Z30E型装载机作为研究对象,使用solidworks三维建模软件创建了装载机工作装置各构件的零件图并用自带的装配功能将各构件装配成完整的工作装置。
在此之后,本文借助于ANSYS有限元分析软件的作用,对装载机的动臂进行科学合理的有限元分析。
在本篇论文中,决定将研究对象设定为Z30E装载机,并对其所应满足的设计要求,进行较为深入的细致阐述。
其次,据此成功构建出相匹配的反转六杆机构模型,并由此针对装载机铲斗以及摇臂等部分,进行科学得当的受力分析。
最后,本文主要针对动臂以及连杆等构件,进行精准有效的强度校核。
用solidworks创建工作装置的三维模型时先简单介绍了三维机械设计软件solidworks。
之后用solidworks的简单功能创建了装载机工作装置主要构件铲斗、动臂、摇臂和连杆的三维模型,并使用装配功能将各构件装配成一个统一的工作装置整体。
以动臂为例,若其达到高度的极小值,则将可进行一系列有限元分析。
此时,仅需将动臂模型融于ANSYS软件中,并在ANSYS中划分网格,再向其赋予一定的载荷,即可针对模型进行科学精准的求解和细致分析,并由此获得应力云图以及相应的位移云图。
据此将可得知,应力的极大值将可达到174MPa,在动臂与举臂油缸铰接处,位移最大值为0.00701m,在动臂的横梁中部处。
在本篇论文中,主要针对装载机所涉及的多样化构件,进行科学合理的受力分析,再据此成功构建出相匹配的三维模型,此外还针对动臂构件进行必要的有限元分析,并由此找出动臂应力值最大的点,对工作装置的优化设计,改善性能等将会有很大帮助。
而且利用计算机可以直接显示出动臂的彩色应力云图和位移云图。
这样复杂的装载机空间应力问题就迎刃而解了。
关键词:装载机;工作装置;建模;有限元分析第1章绪论1.1轮式装载机简介装载机隶属于典型的铲土运输机械装置,这种设备的前端配置了铲斗支撑件以及相应的连杆,相关的随机装置能够前向运动,并能进行多种作业,譬如上提、挖掘、装载、卸载与运输等,其在建筑以及矿山等各种类型的工程建设领域中应用较为广泛。
ZL50轮式装载机工作装置建模及仿真分析
目录摘要 (I)ABSTRACT (II)第一章绪论 (1)1.1 装载机简介 (1)1.2 设计内容 (1)1.3 装载机发展概况 (2)第二章装载机总体设计 (3)2.1 装载机总体参数的确定 (3)2.2 装载机的插入阻力与掘起阻力的确定 (4)第三章装载机工作装设置计 (6)3.1 工作装置的设计要求 (6)3.1.1概述 (6)3.1.2轮式装载机工作过程 (7)3.1.3 轮式装载机工作装置设计要求 (7)3.2 铲斗设计 (8)3.2.1铲斗的结构形式 (8)3.2.2铲斗的分类 (9)3.2.3铲斗的设计要求 (9)3.2.4铲斗设计 (9)3.3 动臂设计 (14)3.3.1对动臂的设计要求 (14)3.3.2 动臂铰点位置的确定 (14)3.3.3动臂长度D l的确定 (16)3.3.4动臂结构和形状的确定 (17)3.4 连杆机构的设计 (18)3.4.1工作装置连杆机构的类型 (18)3.4.2连杆机构的设计要求 (20)3.4.3连杆机构尺寸参数设计及铰点位置确定 (21)第四章工作装置受力分析及强度计算 (26)4.1 确定计算位置及典型工况 (26)4.1.1计算位置的确定 (26)4.1.2典型工况选取和外载荷的计算 (26)4.2 工作装置受力分析 (27)4.2.1对称载荷工况 (27)4.2.2偏载工况 (30)4.3 工作装置强度校核 (31)4.3.1动臂 (31)4.3.2铰销强度的校核 (32)第五章工作装置的建模及仿真分析 (34)5.1 工作装置建模 (34)5.1.1在Pro/E中建立铲斗 (34)5.1.2启动ADAMS/View 程序 (35)5.1.2检查和设置建模基本环境 (35)5.1.3 Pro/E铲斗模型导入ADAMS (35)5.1.4工作装置的几何建模 (36)5.1.5 创建约束及施加运动和载荷 (38)5.2初步仿真分析该模型的性能参数 (41)5.2.1铲斗后倾角及卸载角的测量 (41)5.2.2分析 (43)第六章结论 (44)参考文献 (45)致谢 (46)装载机是一种用途较广的铲运、施工机械。
基于AMESim的装载机工作液压系统仿真分析

基于AMESim的装载机工作液压系统仿真分析作者:王峰来源:《科技资讯》2018年第21期摘要:AMESim软件作为液压仿真分析件之一,凭借其自身的优势特点,在机械工程液压行业广泛应用。
结合实际装载机工作液压系统和机械动作结构,介绍了AMESim软件在液压系统设计中的应用。
对装载机铲斗及其相关液压系统进行了建模仿真计算,说明了若液压泵选择不当可能造成的后果,为液压泵的选择提供了借鉴数据。
同时针对负载敏感液压系统进行了仿真分析,验证了其可行性。
并且进行了机液联合仿真计算,为机械耦合设计提供了新思路。
关键词:液压系统仿真装载机 AMESim中图分类号:TH243 文献标识码:A 文章编号:1672-3791(2018)07(c)-0074-02由于机电液耦合运动操控方式的不断改进,在全球化趋势越来越明显的今天,各个行业的竞争也来越激烈,机制行业则有过之而无不及。
面对这样的局面,如何迅速、精准地设计机械液压系统,是提高企业竞争力的关键所在[1]。
1 AMESim仿真分析软件AMESim是一款多学科领域复杂系统建模仿真平台。
该软件拥有超过27个不同方向的工具包,每个工具包由该学科的基础结构单位组成,且这些不同学科方向的工具包中的基础结构单元都是实际应用中验证过的,是可行的。
该软件拥有与多种软件通讯的接口,可以与Simulink、Adams、Simpack、Flux2D、RTLab、SPACE软件联合仿真。
2 装载机工作液压系统的建模与仿真2.1 装载机工作系统建模结合模拟项目,在软件的液压部件包和机构包中挑选合适的结构,然后设立动作系统的液压部分和动作结构,调整各方面数据,通过操作信号使用液压结构。
在模拟的操作时,液压部件对动作结构作用一个力,令动作结构能够执行到位,动作机构的速度、位移量和加速度等数据传输给液压部分,液压部分根据需要再进行调整,以完成模拟。
2.2 装载机负载分析以装载细河沙为例,装载机铲斗在插入细沙和从沙堆掘出时的阻力为最大。
装载机动臂动力学仿真分析

本文对 ZL15 轮式装载机动臂在变载荷状态 下做动力学仿真分析。根据该型号装载机的已知 参数,对装载机动臂在整个工作过程的运动状态 建立动力学模型,并对动臂关键部位做受力分析, 确定动臂关键部位载荷变化情况。本研究重点在 于突破以往对动臂研究仅限于在静载荷条件下对 动臂进行强度分析的局限,利用 Solidworks 三维制 图软件中自带的动力学分析模块——Motion 插 件,对装载机动臂在变载荷条件下进行受力分析。
2)由于装载机工作装置位移响应是时间的函 数,故在机械系统中就会存在速度和加速度。因 此相对于静力学分析而言,动力学分析需要考虑 的因素更多。
总而言之,静力学分析用来求解结构与时间 无关的静力学载荷作用下的响应,并得出所需节 点的位移、节点力、单元力、单元应力和应变等[2]。 而不同于静力学分析,动力学分析常常用来确定
0 10000.0 5000.0
10.0
20.0
30.0
L/s
图 5 铲斗内物料重力-时间关系图
4)运动仿真。 在 Motion 插件中有多种方法可以对装载机工 作装置进行运动仿真。本文使用的方法是通过定
义工作装置中的转斗油缸和举升油缸内活塞运动
速度,使装载机工作装置运动符合装载机实际工
动载荷对整个结构或部件的影响,包括一般模态 及复特征值分析,频率及瞬态响应分析等[3]。
2 动力学分析
假设装载机工作过程动作方式分为铲装过 程、举升过程、卸载过程和下降过程一共 4 个工况 过程。已知装载机工作装置主要由铲斗、动臂、摇 杆、连杆、举升缸、转斗缸组成。动臂与其他各构 件间的铰点位置是动臂优化设计的对象、研究的 重点,而各构件的具体形状则对设计影响很小[4]。 将模型导入 Solidworks 采用 Motion 模块对装载机 工作装置进行仿真分析。
装载机工作装置三维运动仿真_赵建国
装载机工作装置三维运动仿真¹赵建国1,王庆海1,肖宪国2(1郑州大学工学院机械工程学院,郑州450002;2河南机电学校,郑州450002)摘要利用AutoCAD的三维功能对ZL50F装载机工作装置进行三维建模、零件装配和干涉检查;模型导入到3ds max,利用3ds max的层级链接和正、反运动功能,建立装载机工作装置各组成部件的层级链接关系,实现装载机工作装置工作过程的运动仿真。
关键词:AutoCAD3ds max装载机工作装置三维仿真中图分类号:TP39119;TH16文献标识码:B文章编号:1671)3133(2006)01)0123)04Based on AutoCAD and3ds max software realized theloader working device.s3d emu lationZhao Jianguo1,Wang Qinghai1,Xiao Xianguo2(1Zhe ngzhou University,Zhe ngzhou450002,C H N;2Henan school of Mecha nic-Electronic,Zhe ngzhou450002,C H N) Abstract Introduced the methods and the steps that using AutoCAD.s3d-function create the3d-model,assemble parts and check the in terference among the worki ng device of ZL50F.The method that introduced the3d-model of AutoCAD into3ds max was given.The loader working device.s layer link relation was established by using3ds max.s layer link and forward motion and backward motion func-tion.Then,3d emulation of the loader working device.s complex motion was realized.Key words:AutoCAD3ds max Loader worki ng device3d emulation装载机工作装置是由液压缸驱动,完成铲掘、装卸物料的空间多杆机构,是组成装载机的关键部件之一,其设计水平的高低直接影响到工作装置性能的好坏,进而影响整机的性能。
轮式装载机工作装置的有限元分析DOC5
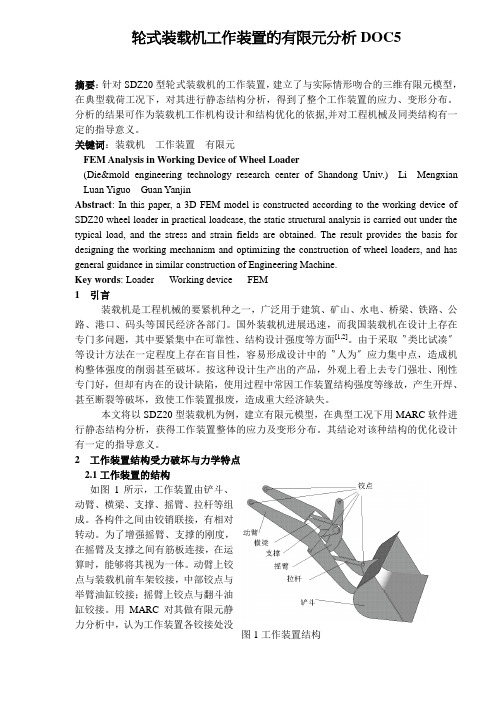
轮式装载机工作装置的有限元分析DOC5摘要:针对SDZ20型轮式装载机的工作装置,建立了与实际情形吻合的三维有限元模型,在典型载荷工况下,对其进行静态结构分析,得到了整个工作装置的应力、变形分布。
分析的结果可作为装载机工作机构设计和结构优化的依据,并对工程机械及同类结构有一定的指导意义。
关键词:装载机工作装置有限元FEM Analysis in Working Device of Wheel Loader(Die&mold engineering technology research center of Shandong Univ.) Li Mengxian Luan Yiguo Guan YanjinAbstract: In this paper, a 3D FEM model is constructed according to the working device of SDZ20 wheel loader in practical loadcase, the static structural analysis is carried out under the typical load, and the stress and strain fields are obtained. The result provides the basis for designing the working mechanism and optimizing the construction of wheel loaders, and has general guidance in similar construction of Engineering Machine.Key words: Loader Working device FEM1 引言装载机是工程机械的要紧机种之一,广泛用于建筑、矿山、水电、桥梁、铁路、公路、港口、码头等国民经济各部门。
轮式装载机的工作装置设计及动态仿真
第1章ZL50轮式装载机的工作装置设计1.1 ZL50轮式装载机的工作装置设计要求1.1.1 概述装载机工作装置主要由铲斗和支持铲斗进行装在作业的连杆系统组成,依靠这套装置装载机可以对汽车,火车进行散料装载作业,也可以对散料进行短途运输作业,还可以进行平地修路等作业。
把铲斗更换成专门的装置,还可以进行其他装载作业。
装载机工作装置的结构和性能直接影响整机的工作尺寸和参数,因此,工作装置的合理性直接影响装载机的生产效率、工作负荷、动力与运动特性,不同工况下的作业效果、工作循环时间、外形尺寸和发动机功率等。
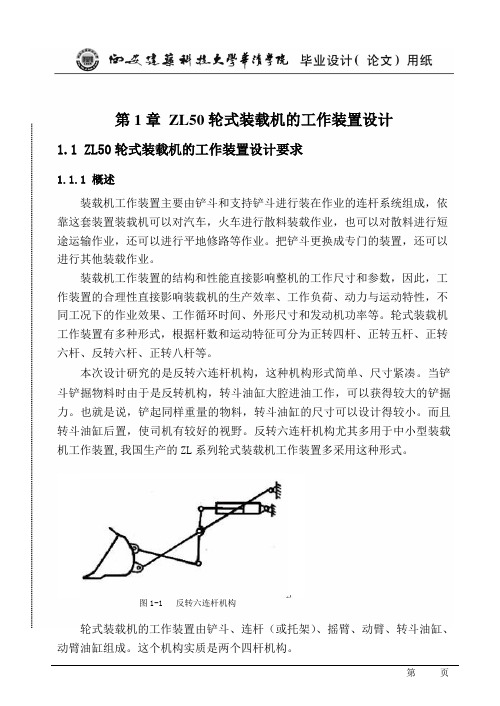
轮式装载机工作装置有多种形式,根据杆数和运动特征可分为正转四杆、正转五杆、正转六杆、反转六杆、正转八杆等。
本次设计研究的是反转六连杆机构,这种机构形式简单、尺寸紧凑。
当铲斗铲掘物料时由于是反转机构,转斗油缸大腔进油工作,可以获得较大的铲掘力。
也就是说,铲起同样重量的物料,转斗油缸的尺寸可以设计得较小。
而且转斗油缸后置,使司机有较好的视野。
反转六连杆机构尤其多用于中小型装载机工作装置,我国生产的ZL系列轮式装载机工作装置多采用这种形式。
图1-1 反转六连杆机构轮式装载机的工作装置由铲斗、连杆(或托架)、摇臂、动臂、转斗油缸、动臂油缸组成。
这个机构实质是两个四杆机构。
图1-2 轮式装载机的工作装置1.1.2 轮式装载机工作过程轮式装载机是一种铲、装、运、卸一体化的自行式设备,它的工作过程由六种工况组成。
○1插入工况动臂下放,铲斗放置于地面,斗尖触地,斗底板与地面呈3°~5°倾角,开动装载机,铲斗借助机器的牵引力插入料堆。
○2铲装工况铲斗插入料堆后,转动铲斗铲取物料,待铲斗翻至近似水平为止。
○3重载运输工况铲斗铲装满物料后举升动臂,将铲斗举升至运输位置(即铲斗斗底离地高度不小于机器的最小允许离地间隙),然后驱动机器驶向卸载点。
○4举升工况保持转斗缸长度不变,操作举升油缸,将动臂升至上限位置,准备卸载。
挖掘装载机装载工作装置动力分析、动态应力仿真研究及动臂结构拓扑优化

挖掘装载机装载工作装置动力分析、动态应力仿真研究及动臂结构拓扑优化一、本文概述本文旨在深入研究挖掘装载机装载工作装置的动力学特性,通过动态应力仿真分析,揭示装载工作装置在作业过程中的应力分布与变化规律,并在此基础上,对动臂结构进行拓扑优化,以提升其结构性能和使用寿命。
研究过程中,将结合理论分析、仿真模拟和实验验证等多种手段,构建全面、精确的动力学模型,并对模型的有效性进行验证。
本文的研究成果将为挖掘装载机的设计与优化提供重要的理论依据和技术支持,有助于提高装载机的作业效率和安全性能,促进挖掘机行业的持续发展。
在文章的结构安排上,首先将对挖掘装载机装载工作装置的动力学特性进行概述,为后续研究奠定基础。
接着,将详细介绍动态应力仿真分析的方法与过程,包括模型的建立、边界条件的设定、仿真结果的分析等。
在此基础上,将探讨动臂结构的拓扑优化方法,包括拓扑优化理论、优化模型的构建以及优化结果的评价等。
将通过实验验证仿真分析的有效性和拓扑优化的可行性,进一步说明研究成果的实用价值和应用前景。
本文将全面深入地挖掘装载机装载工作装置的动力学特性和动态应力变化规律,通过对动臂结构的拓扑优化,为挖掘装载机的设计与优化提供有力支持,推动挖掘机行业的技术进步和创新发展。
二、挖掘装载机装载工作装置动力分析挖掘装载机作为工程机械的重要组成部分,其装载工作装置的动力性能直接决定了机器的作业效率和稳定性。
因此,对挖掘装载机装载工作装置进行动力分析具有重要意义。
动力分析的主要目的是揭示装载工作装置在作业过程中的动力学特性,包括动态响应、振动特性以及能量传递等。
通过动力分析,可以深入了解装载工作装置在不同工况下的受力状态和运动规律,为后续的动态应力仿真研究和结构优化提供理论支持。
在动力分析过程中,通常采用多体动力学仿真软件建立装载工作装置的三维模型,并设置相应的约束条件和驱动函数。
通过仿真计算,可以模拟装载工作装置在实际作业过程中的动态行为,获得关键部件的动态位移、速度和加速度等动力学参数。
装载机工作装置的实体建模和运动仿真
目录摘要 ............................................................................................................................................. I I 第一章绪论 (1)1.1 装载机的简介 (1)1.1.1 转载机的发展历史及前景 (1)1.1.2 装载机的种类 (2)1.2 运动仿真技术简介 (4)1.2.1 运动仿真技术产生的背景 (4)1.2.2 运动仿真技术 (5)1.2.3 运动仿真技术在国内外的发展情况 (5)1.2.4 发展运动仿真的重要意义 (5)1.2.5 总结 (6)1.3 Pro/ENGINEER 软件在工程设计中的应用 (6)1.3.1 Pro/ENGINEER 软件介绍 (6)1.3.2 运动仿真技术队装载机设计理念的影响 (8)第二章液压缸的选择 (10)第三章装载机工作装置三维实体建模 (11)3.1 工作装置零件建模 (11)3.1.1 动臂的生成 (12)3.1.2 铲斗的生成 (12)3.2 工作装置装配模型建模 (16)3.2.1 底座模型装配 (18)3.2.2 动臂模型装配 (18)3.2.3 铲斗模型装配 (19)3.2.4 液压缸体模型装配 (19)3.2.5 摇杆模型的装配连接 (20)3.2.6 连杆模型与铲斗模型和摇杆模型的装配连接 (20)3.2.7 销钉模型的连接 (20)第四章载机工作装置运动仿真 (24)4.1 概述 (24)4.2 创建装载机工作装置的机械运动仿真 (24)4.2.1 连接轴设置 (24)4.2.2 创建快照 (26)4.2.3 定义伺服电动机 (26)4.2.4 运行运动 (29)4.2.5 结果回放动态干涉检查与制作播放文件 (31)4.2.6 测量 (33)第五章结论 (37)致谢 (38)参考文献 (39)摘要装载机是一种应用广泛的工程机械。
轮式装载机工作装置的虚拟设计和三维仿真毕业设计论文
文档从互联网中收集,已重新修正排版,word格式支持编辑,如有帮助欢迎下载支持。
XXXX大学本科毕业设计(论文)学院专业机械设计制造及其自动化学生姓名班级学号指导教师二零年月XXXX大学本科毕业论文ZL50G式轮式装载机工作装置的虚拟设计和三维仿真The type of ZL50G wheel loader working device virtual design and three-dimensional simulation完整的毕业设计过程ProE 三维建模,包括零件,装配图以及运动仿真这里贴上转载机CAD图该毕业设计成果经过严格而完整的毕业答辩过程,并取得优秀。
如有需要可以联系球球3(理工类):X X X X大学毕业论文(设计)任务书学院:专业:机械设计制造及其自动化学号:姓名:指导教师:职称:20 年月日注:1、如页面不够可加附页2、以上一~五项由指导教师填写摘要装载机是铲土运输机械类中的一种,常见的装载机有自行式履带装载机和轮胎式装载机,装载机主要由工作装置、动力系统、传动系统、制动系统、行走系统、液压系统、电气系统等组成。
本篇论文主要讨论装载机工作装置系统的三维设计和运动仿真。
装载机工作装置主要包括铲斗、工作装置连杆系统、机架等部分,其中铲斗的设计与参数计算、工作装置连杆系统的设计与参数计算是本次设计与计算的重点,工作装置连杆系统的三维建模与运动仿真主要在Pro/E软件中设计完成。
装载机是工程机械中的重要机种,主要用于公路建设、铁路修建、建筑工程、港口与矿山建设等工程建设中,而轮式装载机是目前应用最为广泛的机种,轮式装载机具有作业速度快、效率高、维修方便、机动性好、操作轻便等优点,因此其应用广泛。
在轮式装载机工作装置的设计中,目前应用最为广泛的工程设计软件是美国参数技术公司推出的Pro/E软件,在本次设计中也将应用Pro/E软件来进行工作装置的三维建模和运动仿真。
关键字:轮式装载机工作装置三维建模运动仿真AbstractLoaders belong to shovel transport machinery, is a front-mounted bucket supporting structure and linkage, loading or excavating when it goes forward, as well as upgrading, transportting and unloading machinery self-propelled crawler or tire .It is widely used in highway, railway, construction, electrical and mechanical, port and mining and other projects.Loader has many advantages such as fast operating speed, high efficiency, good mobility, easy operation, etc. so it becomes the main machinery in the engineering construction of earthwork construction.Loaders plays an important role in the construction of speeding up construction speed, reducing labor intensity, improving project quality, reducing project costs and also become a indispensable modern machinery.Loader is widely used construction machinery.But the traditional development model exists lots of problems such as longer development cycle ,complex process, high development costs,difficult performance testing.This article will introduce the simulation technology in the loaders development field,complete the following tasks.Keywords: Loader; Working device; Three-dimensional modeling; Motion Simulation目录第一章绪论----------------------------------------------------------11.1 装载机总体概况------------------------------------------------------11.2 装载机的简介--------------------------------------------------------11.2.1 我国装载机发展历史--------------------------------------------11.3 Pro/ENGINEER软件在工程设计中的应用----------------------------------4第二章轮式装载机工作装置的设计--------------------------------62.1 工作装置的组成------------------------------------------------------62.2 铲斗设计------------------------------------------------------------62.2.1 铲斗斗型的结构分析--------------------------------------------72.2.2 铲斗基本参数的确定--------------------------------------------82.2.3 斗容的计量---------------------------------------------------102.3 工作装置的设计和图解法的应用---------------------------------------122.3.1 动臂与铲斗、摇臂、机架的三个铰接点B、E、A的确定---------------132.3.2 连杆与铲斗和摇臂的两个铰接点C、D的确定----------------------152.3.3 举升油缸与动臂和机架的铰接点H及M点的确定--------------152. 4 确定动臂油缸的铰接位置及动臂油缸的行程--------------------------162. 4.1 动臂油缸的铰接位置-----------------------------------------16l 的确定--------------------------------------172. 4.2 动臂油缸行程H第三章装载机工作装置三维实体建模----------------------------183.1 工作装置零件建模-----------------------------------------------183.1.1 动臂的生成------------------------------------------------223.1.2 铲斗的生成--------------------------------------------------233.1.3 机架的生成 -------------------------------------------------233.1.4 连杆的生成--------------------------------------------------233.1.5 摇臂的生成---------------------------------------------------243.1.6 液压缸筒和活塞的生成-----------------------------------------243.1.7 连接销轴的生成-----------------------------------------------25 3.2工作装置的装配模型-------------------------------------------------27 第四章装载机工作装置运动仿真--————-----------------324.1 概述---------------------------------------------------------------32 4.2 创建机械运动仿真环境-----------------------------------------------324.2.1 创建快照-----------------------------------------------------32 4.2.2 定义伺服电机-------------------------------------------------32 4.2.3 运动运动-----------------------------------------------------35 4.2.4 测量---------------------------------------------------------39 致谢------------------------------------------------------------------43 参考文献-------------------------------------------------------------44第一章绪论1.1 装载机总体概况装载机是现代工程机械的重要机种之一,它在公路、铁路、建筑、水电、港口、矿山等建设中发挥极其重要的作用,常用在铲装土壤、砂石、石灰、煤炭等散状物料的施工中,同时能对矿石、硬土等进行轻度铲挖工作。
基于ADAMS装载机工作装置性能分析

万燕波 郭 小 宏
科
基于 A A D MS装载机工作装置性能分析
( 重庆交通 大学 机 电与汽车工程学院 , 重庆 40 7 ) 0 0 4
摘 要 : 用现代 C E软件 U A AMS对轮式装载机工作装置进行运动 学及动 力学研 究。 出工作 装置作 业过程 中各构件 负载和相对位 置 利 A G、 D 得 关系的函数 曲线并进行分析。分析 结果 为工作装置设计提供依据 , 用性强。 适 关键词: 装载机 ; 工作装置; G; D MS 作 业仿真 U AA ; 引言 机工作装置约束和载荷分 析。装载机工作装置 1 . 4仿真过程的控 制。装载机工作装置的 装 载机工作装 置是带 液压缸 的空 间多杆 的典 型工作过程包括插入 、 铲装 、 重载运输 、 卸 典型工作过程可以分 为以下 4 个阶段:1 . 转 .1 4 机构 , 主要完成装卸工作 。 工作装置是组成装载 载和空载运输。 动臂缸 闭锁 , 收斗 , 物料的铲 铲斗 实现 本文不考虑运输工况 。 工作装置 斗缸伸长, 机 的关键部位之一 , 其设计水平的高低直接影 在进行铲掘作业 中的作业 阻力主要是 :铲斗插 装 ;. 2 1 . 转斗缸 闭锁 , 4 动臂缸伸长 , 动臂上举, 实 响装载机的工作性 能、 工作效率及性能指标 。 因 入料堆时的插入力 ; 提升动臂时的铲起力 ; 翻起 现物料的举升 ;. 3 1 - 转斗缸收缩, 4 动臂缸 闭锁 , 此工作装置的分 析研究意义重大。 转斗时的转斗阻力矩 。本文考虑的工况是铲 斗 铲斗翻转, 实现物料的卸载 ; .4 1 . 转斗缸 闭锁 , 4 M CA A S 目 S .D M 是 前应用最广 泛的仿 真软 插人运动的同时, 又配合铲斗的翻转运动 , 么 动臂缸收缩, 那 动臂下降, 自动放平, 铲斗 自动进入 件, 它使 用交 互式图形环境和零件库 、 约束库 、 阻力为插入力和转斗阻力矩。将转斗 阻力矩转 下一次铲 掘状态 。可以用 A MS S L E , 其 换成铲取 阻力 ,因此这里工作装 置所受 的载荷 令流来 实现装载机工作装置动力学仿真过程 的 求解器采用 多刚体系统动力学理论 中的拉格 郎 有插入阻力 n 、 n 铲取 阻力 Fh 物料重力 和 控制。 s、 对应于工作过程 的 4个阶段, 仿真过程 的 日 方程方法 , 建立系统动力学方程, 对虚拟机械 自身的重力。最大插入阻力 F 受 限于最大牵 控 制也分 4个阶段进行。 i n 在仿真过程的每个 阶 系统进行静力学 、 运动学和动力 学分析 、 出位 引力, 输 可用下式计算 : 段, 模型 的动作 由加在构件上 的传感器( no S s) e r 移、 速度、 加速度和反作用力曲线 。 S .D M M CA A S 来 限制, 以保证动作准确到位 。 软件的仿真可用于预测机械系统 的性能 、运动 2数据分析 范围 、 碰撞检测 、 峰值载荷以及计算有限元 的输 21 . 作业载荷分析。 装载机作业 时, 铲斗的 入载荷等 。 式 中 插入和铲装是顺序进行 的 ( 不考虑联合铲装工 1装载机工作装置虚拟样机运动仿真 M一变矩器涡轮输 出力矩 ; 况) ,插入阻力和铲取 阻力依次达到最大值 , 物 1 三维几何 模型 的创建 。M CA A S . 1 S .D M / i 变矩器涡轮至轮边的传动 比 ; 一 料重力则在铲取开始阶段达到最大值 ,各构件 Ve 虽然 功能强 大,但造型功 能相 对薄弱 , i w 难 传动效率 ; 的自 重则不发生变化。模 拟仿真时使用系统提 以用它创建具有复杂特征的零件 ,创建类似装 R一 f 轮胎动力半径。 供的sp t 函数代表 、 和 ,三个力随时间 e 载机工作装置这样复杂的机构是不现实的 。因 最大铲取阻力 可用铲取 时最大转斗阻 的变化情况。 仿真一个作业循环 , 得到动臂缸和 此 ,我们用 U G创建模型 ,然后将模 型传送给 力矩换算取得。最 大转斗 阻力矩发生在开始转 铲斗缸在 作业 过程 中的受力情 况如 图 3所示 , MS . A CAD MS进行分析。 斗 的一瞬 间,其值可用下列公式计算 :如图 2 负载在开始铲掘时同时达到最大 ,并随着铲斗 ( 插入深度的增加 而增大 , 之后动臂缸重载举 升 , 1 . 2三维几何模 型的导入 。 本文将 U G环境 所 示 ) 下的装载机工作装 置实体数据模 型以 A AMS D a . 转斗时静阻力矩的确定 。 在开始翻斗时 , 受力随着信 力比的减小而增大 ,最后 随着卸载 能 较好识 别 的 p rsl aaoi d格式 导 出 ,其 导人 步 需要克服的阻力矩 M 是最大静阻力矩 ( 或称铲 减小到最小值 。作业过程 中动臂缸和铲 斗缸 在 骤: ①在 A A S F e I pr对话框 中选择 斗初始静阻力矩 ) D M 的 i o l m t ,它与插入阻力 之 间有 下 的受力情况 如图 4所示 。 p rsl ( 一m_x *m i 文 件类 型 , 入文 面的函数关 系: aaoi *x ttt x tbn) d . 输 f 1 1 件 的路径和零件名 。在 P r N m 框 中单击右 at a e .,o X一 £l + I I . 4 m 键选择 C et, r e 并在 弹出的对话框 中修 改 Pr M =1F l ( 寺 ) y a a t Nm 项 , a e 连续单击 0 即可导入 部件 ; 导人 k ② I 斗插入料堆的最大深度 文 件后 ,双击 部件 弹 出” o i i d o y对 M df R g b d ” y i 斗回转 中心 0与斗刃的水平距 离 话框 ,在 De n s y t f e Mas B 栏选择 G o t n emer ad y Y 一铲 斗回转 中心 0与地面的垂直距 离 Mae a T p 在 Mae a T p t l ye i r tr l ye文 本 框 选 择 . i M t a s e 单击 A p 完成质量 、转动惯量 、 a r 1t l e .e i pl y
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
S m u a i n a l ss o i l to na y i fwhe ll a r wo k ng de i e e o de r i v c
t e smu ai n a ay i ,h a a tr ft e w r i g d v c s mo i e n h o ai n o h ig o n r e e ,t e h i lt n l ss t e p r me e s o h o k n e i e i o d f d a d t e lc t ft e h n e p i ta e r s t h i o me h ns p r mee s a d h n e p i t o ain ae g t h c a e h e in o t z t n r q i me t ,a d t e f e a k c a im a a tr n ig o n c t o ih c n me tt ed s p i ai e u r l o r w g mi o e n s n h u l n t
Ab t a t h sa l h n fs - a c a im o h h e o d rwok n e i e i d l d b D mo e ig s f r s r c :T e e t bi me to i b r me h n s ft e w e ll a e r i g d vc s mo ee y 3 d l o t e s x n wa UG,t e s lt n a ay i o o k n e i ei s d mu t- o y d n mi sa ay i s f r AMS h i ai n lss fw r ig d v c su e l b d y a c n lss ot e AD mu o i wa .B sn h e u t f y u i gt e r s l o s
不足 , 步更 改 , 且 还 可 通过 参 数 化 模 型 进 行 工 作 逐 而
1 引 言
轮式 装载机 是 目前工 程 机械 中发 展较 快 , 市场需
不需 要 绘制 , 只要 保 证 工 作装 置在 形 式 上 相 连 , 要 主 是 为 了避免 在多 体动 力学 模 型 中零 部件 过多 , 部件 零 之 间 的约束 关 系不 易确定 , 了在 多体 动力 学模 型 中 为 实 现操 作方便 以及便 于实 现 参 数 化模 型在 此可 以简
o e moi n c n r l a a tr , h c a r v d ee e c o e la e r i g d v c ra. ft t o to rmee s w ih c n p o i e a r fr n ef rt o d rwo k n e i e t 1 h o p h i Ke r s o d r wok n e i e smu ai n a ay i y wo d :l a e ; r i g d vc ; i l t n l ss o
摘
要: 利用三维造型软件 U G建立轮 式装载机 工作装置 的六连杆机构 , 通过 多体动 力学分析软件 A A D MS实现虚拟
仿真 , 通过仿 真分析的结果对3 作装置机 构参数修 改以及铰接 点位 置的 重新设 定, 出符合 设计优化 要 求的 - 得
机构参数和铰接点位置 , 以及油缸运动控制参数 。为装载机工作装置的试制提供参考数据 。
化 连接 销 。
求较大的工程机械装备 , 前应用较多的是六连杆机 目 构 , 次设 计采 用 的 是反 转 六 连 杆 机 构 , 其 举 升 性 本 对 能进行 优 化设计 。传统设 计 采用试 制 , 品制 造试 验 产
周 期 长 , 验成 本 高 。 目前虚 拟样 机技 术应 用 于装 载 试
・
机 械 研 究 与 应 用 ・ 0 年 期( 第1 期 2 2 第5 总 2 ) 1 1
设ቤተ መጻሕፍቲ ባይዱ与制造
轮 式装 载 机 工 作 装 置 的 仿 真 分 析
吴 丹 , 玉 杰 I纪 -
( . 阳理 工 大 学 机 械 学 院 , 宁 沈 阳 105 2 沈 阳 交通 工程 学校 , 宁 沈 阳 10 2 ) 1沈 辽 1 19; . 辽 10 6
机工作 装 置 的设 计 与优 化 , 短产 品研 制周 期 以及试 缩
验成本 , 而且操 作 实 现 方 便 。采 用 虚 拟 样 机 技术 , 利 用三 维建 模 软件 对 工 作 装 置 进行 建 模 , 过 A A 通 D MS
中的 三 维 接 口转 化 为 A A D MS的 分 析 模 型 , 过 对 通 AA D MS中的工 作装 置进 行 仿 真 分 析 , 出设 计 中的 找
W u Da ,J Yu i n i —i e
( . h n a g L o g u i r t ,h n a g La nn l 0 5 , hn ; 1 S ey n i  ̄ nv sy S ey n i i g ei o g 1 19 C i a
2 S ey n a c n i e n ho,hn agLann 10 2 ,hn ) .hna gtf gn r gs olS eyn io i rf e e i c i g 10 6 C i a