智能车红外寻迹导航系统设计与实现
基于红外传感器的自动寻迹智能小车设计
毕业设计(论文)基于红外传感器的自动寻迹智能小车设计系别专业班级学号姓名指导教师基于红外传感器的自动寻迹智能小车设计摘要介绍了一种自动寻迹智能车的设计,研究了采用红外反射式光电传感器作为路径采集模块实现自动寻迹的软硬件设计方法。
系统采用Freescale 16位单片机MC9S12DG128为核心控制器,利用12个红外光电传感器构成的光电传感器阵列采集路面信息,单片机获得传感器采集的路面信息和车速信息,经过分析后控制智能车的舵机转向,同时对直流电机进行调速,从而实现智能车沿给定的黑线快速平稳地行驶。
介绍了光电传感器的寻迹原理,讨论了光电传感器排列方法、布局等对寻迹结果的影响及速度和转向控制的PID算法的研究和参数整定。
关键字:光电传感器,寻迹,路径识别,PWM,PIDDesign of autonomous tracing smart car based on infrared sensorsAuthor:Xue ChangliangTutor:Gu DeyingAbstractA design of autonomous tracing system in intelligent vehicle is introduced. The software and hardware design method which realizes the autonomous tracing using the infrared Reflective photoelectric sensors as the path recognition module is researched. The system employs Freescale HCS series 16 bit single-chip microcomputer MC9SDG128 as its main controller and an array of photoelectric sensors for recognizing the path information. Single-chip Microcomputer energizes the PWM signal to steer and control the speed of the DC electric motor according to the analysis of the path and speed information from sensors. Consequently, this intelligent vehicle can track the black-guide-line automatically and move forward following the line quickly and smoothly. The autonomous tracing principle of photoelectric sensor is presented. The effects of sensor s’ array method, overall arrangement on the autonomous trace are discussed. And the use of PID algorithm in speed and steering control.Key words : photoelectric sensor ,autonomous tracing, path recognition, PWM,PID目录第1章绪论 (1)1.1 课题的研究背景 (1)1.2 国内外智能车的研究现状 (1)1.3 本文内容及结构安排 (3)第2章红外传感器的寻迹原理及布局对寻迹的影响 (4)2.1红外传感器寻迹原理 (4)2.2传感器布局对路径识别的影响 (6)2.2.1布局相关参数 (6)2.2.2一字型与八字型布局研究 (6)第3章智能车机械结构的调整 (9)3.1 赛车参数 (9)3.2舵机安装方式调整 (10)3.3 前轮定位 (10)3.3.1主销后倾角 (10)3.3.2主销内倾角 (11)3.3.3 前轮外倾角 (12)3.3.4前轮前束 (13)3.4重心位置 (13)3.5 齿轮传动间距调整 (14)3.6后轮差速机构调整 (14)第4章系统硬件设计 (15)4.1 S12控制核心 (16)4.2电源管理模块 (17)4.2.1 单片机稳压电源电路设计 (17)4.2.2 舵机电源模块设计 (19)4.3 电机驱动模块 (20)4.4速度检测模块 (23)4.5 路径识别模块 (25)第5章系统软件设计 (27)5.1 系统的模块化结构 (28)5.1.1 时钟初始化 (28)5.1.2 串口初始化 (28)5.1.3 AD初始化 (29)5.1.4 PWM初始化 (30)5.2 路径信息处理 (32)5.3 数字滤波算法 (33)5.4 小车控制算法 (35)5.4.1 PID算法 (37)5.4.2 舵机控制 (39)5.4.3 电机控制 (39)第6章系统调试 (40)6.1 开发调试工具 (40)6.2 无线调试模块 (42)6.3拨码开关调试 (42)6.4 试验结果分析 (42)结论 (44)致谢 (45)参考文献 (46)附录 (47)附录A 硬件原理图 (47)附录B程序源代码 (49)附录C Sorting out PID controller differences (69)第1章绪论1.1 课题的研究背景汽车工业发展已有100多年的历史。
智能循迹小车的设计与实现
本系统循迹采用 了8组 红外对管来循迹黑色路径 ,红外
小车控制板 上的WiFi模块 ,WiFi模 块将数据 以串行方式发 发射 管发射红外线到地面上 ,如果遇到黑色循迹线 ,则被吸
送 给¥5PV210微控制器,¥5PV210微控制器根据控制命令驱 收,不能反 射给 红外接 收管,当遇 到循迹线外的其余 白色 区
一 66 —
第 5期 2018年 3月
无 线 互 联 科 技 ·设 计分 析
NO.5 MarCh,20l8
内定 时 器 开 始 计 时 ,超 声波 在 遇 到 障碍 物 时 会立 刻 反 射 回 定 时器 记 录 的 时 间差 确 定与 障 碍 物 距 离 。超 声 波 发射 电 路 来,超声波接 收传感 器接收到反射波 ,同时停止计 时。通过 原 理 如 图 3所 示 。
第 5期 2018年 3
无 线互 联科 技
Wire1ess Internet Technology
智能循 迹小 车 的设 计与 实现
No.5 March,2018
过 怡 ,王云宝 ,董亚萍
(苏州市职业大学 计算机 工程 学院,江苏 苏州 215104)
摘 要 :文章设计一种基于Andorid移动终端控制的智能小车系统 ,小车采用四轮 结构 ,8组 红外对 管对黑 色轨 迹 进行循 迹 ,利用超声波传感器进行避 障。S5PV210微控制器系统进行传感器控制及小车循迹 。Andorid移动终端通i ̄WiFi模块与 S5PV210微控制器进行数据 通信,实现 小车的灵活控制和信息的实时采集。 关 键 词 :循 迹 ;Andorid;S5PV210;WiFi
能小车 ,然后将小车放到场地中运行,一旦小车开始运行,无 PLL/看 门狗等片上外设[21。完全可以满足本系统WiFi数据 的
智能循迹小车的设计与实现

智能循迹小车的设计与实现作者:过怡王云宝董亚萍来源:《无线互联科技》2018年第05期摘要:文章设计一种基于Andorid移动终端控制的智能小车系统,小车采用四轮结构,8组红外对管对黑色轨迹进行循迹,利用超声波传感器进行避障。
S5PV210微控制器系统进行传感器控制及小车循迹。
Andorid移动终端通过WiFi模块与S5PV210微控制器进行数据通信,实现小车的灵活控制和信息的实时采集。
关键词:循迹;Andorid:S5PV210:WiFi智能小车的应用领域十分广泛,目前智能小车的设计和研发过程中通常通过串行口与PC 连接进行数据的传递,PC机上的上位机软件系统通过串行方式将控制数据传递给智能小车,然后将小车放到场地中运行,一旦小车开始运行,无法根据小车实际运行情况实时改变参数和获得小车的运行参数。
部分智能小车虽然可以通过无线遥控方式控制移动小车动作,但是局限于特定环境并且上位机系统无法获得实时运动情形[1]。
这样对小车的调试和设计带来困难,延长了小车设计调试的时间。
本文采用无线WiFi模块将智能小车与移动终端(Android手机、平板电脑等)相连,利用移动终端良好的图像界面,便于携带,随处移动等特性,代替传统PC机的上位机系统,可以遥控智能小车的运动,并根据小车的实际运行状态随时发送修改参数,并获得智能小车的参数信息,大大提高了智能小车调试测试的效率。
1 系统整体结构移动终端上运行上层控制软件,用户在上层控制软件上设置相应参数,移动终端将控制命令通过WiFi发送给智能小车控制板上的WiFi模块,WiFi模块将数据以串行方式发送给S5PV210微控制器,S5PV210微控制器根据控制命令驱动电机控制车轮以一定速度行进,S5PV210微控制器底层代码定时获取红外传感器和车轮码盘数据以调整车轮转向和速度,实现沿黑线循迹,同时定时获得超声波传感器数据实现避障。
用户需要查看小车的参数时,可以在上层控制软件上选择显示信息,S5PV210微控制器将采集到的超声波、光照、码盘等信息发送给移动终端并显示在上层软件界面上。
循迹避障智能小车设计

循迹避障智能小车设计一、硬件设计1、车体结构智能小车的车体结构通常采用四轮驱动或两轮驱动的方式。
四轮驱动能够提供更好的稳定性和动力,但结构相对复杂;两轮驱动则较为简单,但在稳定性方面可能稍逊一筹。
在选择车体结构时,需要根据实际应用场景和需求进行权衡。
为了保证小车的灵活性和适应性,车架材料一般选择轻质且坚固的铝合金或塑料。
同时,合理设计车轮的布局和尺寸,以确保小车能够在不同的地形上顺利行驶。
2、传感器模块(1)循迹传感器循迹传感器是实现小车循迹功能的关键部件。
常见的循迹传感器有光电传感器和红外传感器。
光电传感器通过检测反射光的强度来判断黑线的位置;红外传感器则利用红外线的反射特性来实现循迹。
在实际应用中,可以根据小车的运行速度和精度要求选择合适的传感器。
为了提高循迹的准确性,通常会在小车的底部安装多个传感器,形成传感器阵列。
通过对传感器信号的综合处理,可以更加精确地判断小车的位置和行驶方向。
(2)避障传感器避障传感器主要用于检测小车前方的障碍物。
常用的避障传感器有超声波传感器、激光传感器和红外测距传感器。
超声波传感器通过发射和接收超声波来测量距离;激光传感器则利用激光的反射来计算距离;红外测距传感器则是根据红外线的传播时间来确定距离。
在选择避障传感器时,需要考虑其测量范围、精度、响应速度等因素。
一般来说,超声波传感器测量范围较大,但精度相对较低;激光传感器精度高,但成本较高;红外测距传感器则介于两者之间。
3、控制模块控制模块是智能小车的核心部分,负责处理传感器数据、控制电机驱动和实现各种逻辑功能。
常见的控制模块有单片机(如 Arduino、STM32 等)和微控制器(如 PIC、AVR 等)。
单片机具有开发简单、资源丰富等优点,适合初学者使用;微控制器则在性能和稳定性方面表现更优,适用于对系统要求较高的场合。
在实际设计中,可以根据需求和个人技术水平选择合适的控制模块。
4、电机驱动模块电机驱动模块用于控制小车的电机运转,实现前进、后退、转弯等动作。
智能小车红外循迹原理
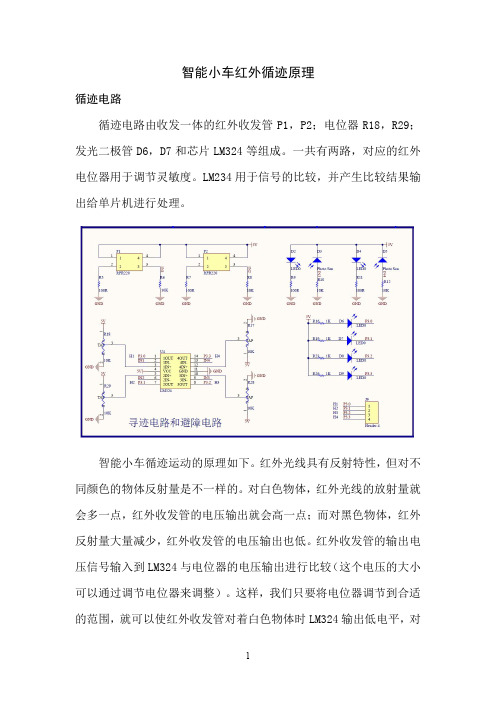
智能小车红外循迹原理循迹电路循迹电路由收发一体的红外收发管P1,P2;电位器R18,R29;发光二极管D6,D7和芯片LM324等组成。
一共有两路,对应的红外电位器用于调节灵敏度。
LM234用于信号的比较,并产生比较结果输出给单片机进行处理。
智能小车循迹运动的原理如下。
红外光线具有反射特性,但对不同颜色的物体反射量是不一样的。
对白色物体,红外光线的放射量就会多一点,红外收发管的电压输出就会高一点;而对黑色物体,红外反射量大量减少,红外收发管的电压输出也低。
红外收发管的输出电压信号输入到LM324与电位器的电压输出进行比较(这个电压的大小可以通过调节电位器来调整)。
这样,我们只要将电位器调节到合适的范围,就可以使红外收发管对着白色物体时LM324输出低电平,对应发光二极管亮;红外收发管对着黑色物体时LM324输出高电平,对应发光二极管灭。
单片机根据LM324输出的电平状态,就能实时判断智能小车是否沿着黑色轨迹运动,如果智能小车是沿着黑色轨迹运动,红外收发管接收的是白色(地板)反光,LM324输出的是低电平;如果智能小车是跑偏了,红外收发管接收的是黑色(轨迹线)反光,LM324输出的是高电平。
单片机根据这一信号判断智能小车的运动状态,及时对智能小车的前进方向作出调整。
循迹电路调节电位器R18左红外信号强度调节---顺时钟调节电位器是增加灵敏度,反时钟调节电位器是减少灵敏度。
没有接收到红外反射信号时,发光二极管D6不亮;接收到红外反射信号时,发光二极管D6亮。
电位器R29右红外信号强度调节---顺时钟调节电位器是增加灵敏度,反时钟调节电位器是减少灵敏度。
没有接收到红外反射信号时,发光二极管D7不亮,接收到红外反射信号时,发光二极管D7亮。
调试注意事项:调试时不要对着强光,建议在室内调试(最好和实验环境一致)。
环境光线对红外线反射的检测有较大的影响,这是由红外线本身的特性决定的。
调节电位器时,要缓慢,细致。
基于单片机的智能循迹小车设计
基于单片机的智能循迹小车设计智能循迹小车是一种基于单片机控制的小型车辆,通过传感器检测路面信息,结合预设路线实时调整行驶方向,实现自动循迹行驶。
智能循迹小车在无人驾驶、智能物流、探险救援等领域具有广泛的应用前景。
智能循迹小车的硬件主要包括单片机、传感器、电机和电源。
其中,单片机作为整个系统的控制中心,负责接收传感器信号、处理数据并输出控制指令;传感器用于检测路面信息,一般选用红外线传感器或激光雷达;电机选用直流电机或步进电机,为小车提供动力;电源为整个系统提供电能。
智能循迹小车的软件设计主要实现传感器数据采集、数据处理、控制指令输出等功能。
具体来说,软件通过定时器控制单片机不断采集路面信息,结合预设路线信息进行数据分析和处理,并根据分析结果输出控制指令,实现小车的自动循迹。
为提高智能循迹小车的稳定性和精度,需要对算法进行优化。
常用的算法包括PID控制、模糊控制等。
通过对算法的优化,可以实现对路面信息的精确检测,提高小车的循迹精度和稳定性。
为验证智能循迹小车的实际效果,需要进行相关测试。
可以在平坦的路面上进行空载测试,检验小车的稳定性和循迹精度;可以通过加载重量、改变路面条件等方式进行负载测试,以检验小车在不同条件下的性能表现;可以结合实际应用场景进行综合测试,以验证智能循迹小车在实际应用中的效果。
测试环境的选择要具有代表性,能够覆盖实际应用中可能遇到的各种情况。
测试过程中要保持稳定的行驶速度,以获得准确的测试数据。
对于测试过程中出现的问题,要及时记录并分析原因,以便对系统进行改进。
测试完成后,要对测试数据进行整理和分析,评估系统的性能表现,提出改进意见。
通过以上测试,我们发现基于单片机的智能循迹小车在循迹精度、稳定性等方面表现良好,能够满足实际应用中的需求。
同时,通过对算法的优化和硬件的改进,可以进一步提高小车的性能表现。
本文介绍了基于单片机的智能循迹小车的设计和实现过程。
通过合理选择硬件和优化软件算法,实现了小车的自动循迹功能。
基于红外线传感器的智能寻迹小车设计
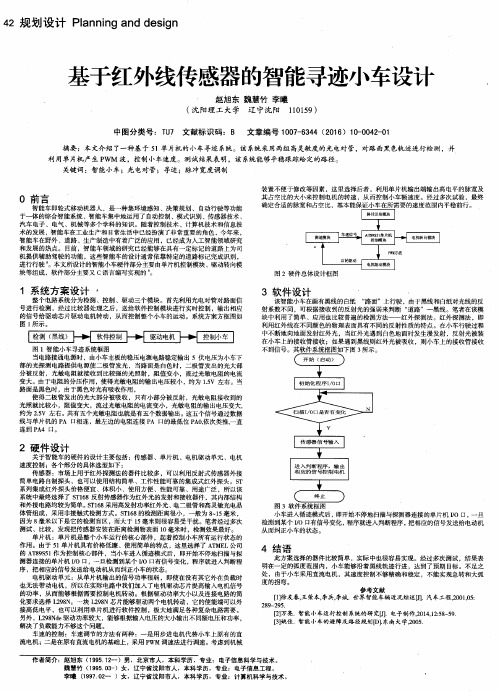
图 2硬件 总体设计框 图
1系统 方案设计 ・
整个电路系统分为检测 、控制 、驱动三个模块 。首先利用光 电对 管对路 面信 号进行检测 ,经过 比较器 处理之后 ,送给软件控制模块进行实 时控制 ,输出相应 的信号给驱动芯 片驱动 电机转动 ,从而控制整个小车 的运动 。系统方案方框图如 图1 所示 。
3 软件 设计
’
检测 ( 黑线) 卜- — . {软件控制 卜 . - ■ 驱动电机 - ■ . {控制小车
图 1智 能小车寻迹 系统 框图 当电路接通电源时 ,由小车主板的稳压电源电路稳 定输 出 5伏电压为小车下 部的光探测 电路提供 电源使 二极管发光 ,当路面是 白色 时,二极 管发出的光大部 分被反射 ,光敏 电阻就接 收到比较强的光照射 ,阻值变小 ,流过 光敏电阻的电流 变大。由于 电阻 的分压作用 ,使得光敏电阻的输出电压较小 , 约为 1 . 5 v 左右 。当 路面是黑色时 ,由于黑色对光有吸收作用 , 使得二极管发 出的光 大部 分被吸收 ,只有小部分被反射 ,光敏 电阻接 收到的 光照就比较小 ,阻值变大 ,流过光敏 电阻 的电流变小 ,光敏电阻 的输 出电压变大, 约为 2 . 5 V 左右 。 共有五个光敏 电阻也就是有五个数据输出。这五个信号通过数据 线与单片机的 P A 1 3 相连, 最左边的 电阻连接 P A 3的最低位 P 1 A O , 依次类推, 一直 连到 P A 4 口。
摘要 :本 文介 绍了一种基 于 5 l 单片机的小车寻迹 系统。该 系统采用两组高灵敏度 的光 电对管 ,对路面黑 色轨迹进行检 测,并 利 用单 片机产 生 P WM 波 ,控制 小车速度 。测试 结果表 明,该 系统能够平稳跟踪给定的路 径。 关键词 :智能小车;光 电对 管;寻迹 ;脉冲 宽度调制
红外自动循迹小车实验报告

摘要本实验完成采用红外反射式传感器的自寻迹小车的设计与实现。
采用与白色地面色差很大的黑色路线引导小车按照既定路线前进,在意外偏离引导线的情况下自动回位,并能显示小车停止的时间。
本设计采用单片机STC89C51作为小车检测、控制、时间显示核心,以实验室给定的车架为车体,两直流机为主驱动,附加相应的电源电路下载电路,显示电路构成整体电路。
自动寻迹的功能采用红外对管LTH1550实现,信号经三极管9012放大,经LM339电压比较器比较之后将信号送给单片机,由单片机通过控制驱动芯片L298N驱动电动小车的电机,实现小车的动作。
同时还可以将小车的停留时间通过四位数码管显示。
关键词:STC89C51单片机;红外对管LTH1550;红外传感器;寻迹一、系统设计任务与要求小车从上坡处开始行驶,到达坡顶停留5秒,由数码管显示停留时间,然后继续行驶,到达坡底开始沿黑线行驶,直到终点宽黑线停止。
二、方案分析与论证总体方案设计:根据题目,我们设计了以下方案并进行了综合的比较论证,自动寻迹电动小车系统由小车主体部分、微控制器模块、寻迹传感器模块、电机驱动模块、显示模块、电源模块构成。
2.1 总体方案论证与比较方案一:采用数字电路来组成小车的各部分系统,实现各部分功能。
本方案电路复杂,灵活性不高,效率低,不利于小车智能化的扩展,设计困难。
方案二:采用单片机来作为整机的控制单元。
黑线检测采用红外对管对光源信号进行采集,再经过三极管放大,电压比较使输出转化为数字信号送到单片机系统处理。
此系统比较灵活,采用软件方法来解决复杂的硬件电路部分,使系统硬件简洁化,各类功能易于实现,能很好地满足题目的要求。
方案二简洁、灵活、可扩展性好,能达到题目的设计要求,因此采用方案二来实现。
方案二的基本结构图如下:图1总体系统结构框图2.2 寻迹检测方案的选择方案一:采用CCD传感器。
利用CCD传感器进行自动导航的机器人已得到初步应用。
但CCD传感器价格较高,体积较大,数据处理复杂,不适合本次实验使用。