【CN109823192A】一种磁悬浮系统【专利】
【CN109823502A】一种利用软体驱动舵翼控制水下机器人浮力的方法【专利】
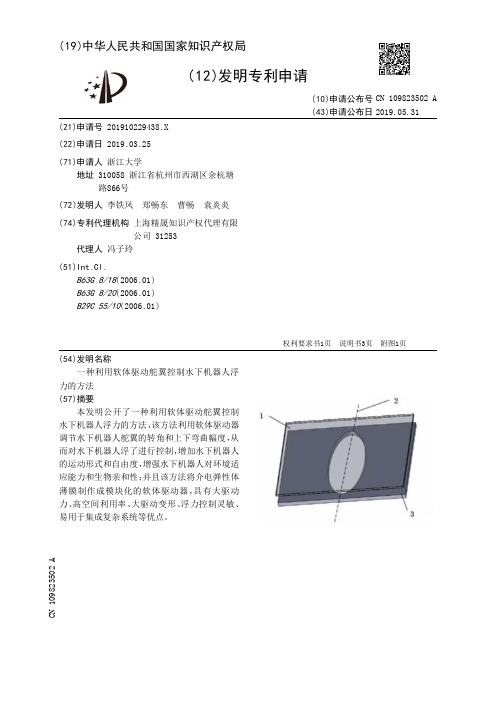
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910229438.X(22)申请日 2019.03.25(71)申请人 浙江大学地址 310058 浙江省杭州市西湖区余杭塘路866号(72)发明人 李铁风 郑畅东 曹畅 袁炎炎 (74)专利代理机构 上海精晟知识产权代理有限公司 31253代理人 冯子玲(51)Int.Cl.B63G 8/18(2006.01)B63G 8/20(2006.01)B29C 55/10(2006.01)(54)发明名称一种利用软体驱动舵翼控制水下机器人浮力的方法(57)摘要本发明公开了一种利用软体驱动舵翼控制水下机器人浮力的方法,该方法利用软体驱动器调节水下机器人舵翼的转角和上下弯曲幅度,从而对水下机器人浮了进行控制,增加水下机器人的运动形式和自由度,增强水下机器人对环境适应能力和生物亲和性;并且该方法将介电弹性体薄膜制作成模块化的软体驱动器,具有大驱动力、高空间利用率、大驱动变形、浮力控制灵敏、易用于集成复杂系统等优点。
权利要求书1页 说明书3页 附图1页CN 109823502 A 2019.05.31C N 109823502A权 利 要 求 书1/1页CN 109823502 A1.一种利用软体驱动舵翼控制水下机器人浮力的方法,其特征在于:包括如下步骤:步骤1、制作软体驱动舵翼,选择1mm厚的VHB4910作为DE材料,预拉伸比例为3×3.5,采用多点拉伸方式,总共12个拉伸点,匀速拉伸VH薄膜,并粘上ABS框架;将碳膏均匀涂抹在预拉伸的VHB膜上,在涂了电极的那一面盖上另一层VHB膜,并在电极上接出两条锡纸用于外接导线,最后粘上设计好的柔性框架,去除多余的VHB薄膜,制成软体驱动舵翼;步骤2、软体驱动舵翼制作完成后,将软体驱动舵翼安装在水下航行器的尾部或者成对对称安装在水下航行器的两侧,使舵翼向后下方呈初始弯曲状态;其中,对所述软体驱动舵翼施加电场激励,在麦克斯韦应力的作用下薄膜厚度减小,长度和宽度增加,薄膜的回复力消失,柔性驱动框架便会在在自己的力矩的作用下恢复自己本身的平面状态,从而使得形变弯曲的角度减小,形成通电状态;断电后,VHB薄膜本身的回复力又使整个结构重新回到初始弯曲状态;步骤3、当水下航行器向前驱动时,舵翼处于初始弯曲状态,所述舵翼下部水流受到阻滞、速度变慢,舵翼下方压力大于舵翼上方压力,使得在软体舵翼的作用下,水下航行器受到向上的浮力作用;而需要减弱所述浮力时,对左右软体驱动舵翼通电以施加相同电场激励,使得其薄膜厚度减小,长度和宽度增加,薄膜的回复力变小,柔性驱动框架便会在在自己的力矩的作用下逐渐恢复自己本身的平面状态,此时水流受到的阻滞效果减小,速度减缓的幅度变小,舵翼下方的上浮力变小,当电压激励达到设定的阈值时,柔性驱动框架完全回复平面状态,此时舵翼对沉浮无影响。
【CN109828478A】一种磁悬浮系统的滑膜控制方法【专利】
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910165589.3(22)申请日 2019.03.05(71)申请人 哈尔滨理工大学地址 150080 黑龙江省哈尔滨市南岗区学府路52号(72)发明人 张静 刘佳兴 (51)Int.Cl.G05B 17/02(2006.01)(54)发明名称一种磁悬浮系统的滑膜控制方法(57)摘要本发明公开了一种磁悬浮系统的滑膜控制方法,涉及磁悬浮技术领域,包含以下步骤:A、磁悬浮系统的建模;B、获取误差信号,并根据误差信号定义滑膜面,通过对滑膜面的一阶求导,求得滑膜控制律,运用Lyapunov函数验证常规滑膜控制的存在性与可达性,通过仿真得到系统特性曲线;本发明磁悬浮系统的滑膜控制方法对常规滑膜控制容易产生抖振的问题,采用添加边界层方法,即使用连续光滑的饱和函数代替切换函数,滑膜面的设计过程中添加积分控制环节,使其变成积分滑膜面,并在控制律中添加指数趋近律。
通过仿真与常规滑膜控制对比,验证改进后削弱抖振的有效性。
权利要求书1页 说明书3页CN 109828478 A 2019.05.31C N 109828478A权 利 要 求 书1/1页CN 109828478 A1.一种磁悬浮系统的滑膜控制方法,其特征在于,包含以下步骤:磁悬浮系统的建模;获取误差信号,并根据误差信号定义滑膜面,通过对滑膜面的一阶求导,求得滑膜控制律,运用Lyapunov函数验证常规滑膜控制的存在性与可达性,通过仿真得到系统特性曲线;在滑膜面中加入积分环节,设定积分增益为正,同时将滑膜面中的切换符号函数用光滑的饱和函数代替,使滑膜面一阶导数为零并加入指数趋近律以得到控制律,运用Lyapunov函数验证滑膜运动的存在性与可达性,通过仿真得到系统状态变量曲线,通过与常规滑膜控制比较,验证基于指数趋近律的积分滑膜控制抑制抖振的有效性;对于系统参数不确定性及外界干扰,添加干扰观测器,构造新的控制律使系统到达滑膜面后沿着滑膜面平稳的移动,通过仿真验证加入干扰观测器后滑动模态下抖振的削弱程度。
一种磁悬浮系统[实用新型专利]
![一种磁悬浮系统[实用新型专利]](https://img.taocdn.com/s3/m/3a0fbf48b0717fd5370cdcde.png)
专利名称:一种磁悬浮系统专利类型:实用新型专利
发明人:杨欢
申请号:CN201620103230.5申请日:20160202
公开号:CN205356194U
公开日:
20160629
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种磁悬浮系统,该系统包括磁性底座和悬浮磁性元件;其中,悬浮磁性元件包括倒锥底部;磁性底座包括:至少三个底座磁铁,其在磁性底座圆周上均匀分布形成一环状矩阵,至少三个底座磁铁的上表面与水平面倾斜形成一倾斜角度,至少三个底座磁铁的上表面磁性与倒锥底部的磁力面磁性相反;倒锥底部与水平面的夹角和倾斜角度相等;和悬浮磁性元件偏移控制机构。
该磁悬浮系统通过具有倒锥底部的悬浮磁性元件与倾斜设置在磁性底座上的磁铁组合使用,大幅减少悬浮磁性元件在水平方向偏移的可能,使得悬浮磁性元件放置操作更为简便,无需多次调试,大幅降低控制电路磁场修正的频率和幅度,让磁悬浮系统更加稳定,不易掉落。
申请人:杨欢
地址:521000 广东省潮州市湘桥区东方威尼斯B栋801
国籍:CN
代理机构:广州粤高专利商标代理有限公司
更多信息请下载全文后查看。
【CN109862771A】一种超导磁悬浮系统的磁屏蔽装置及方法【专利】
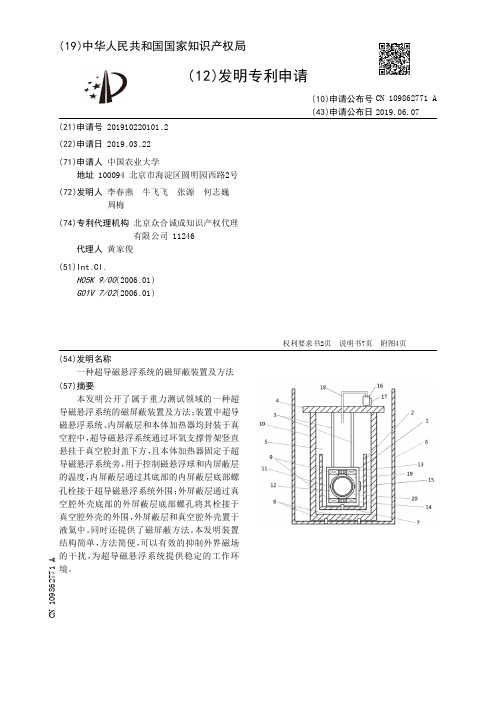
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910220101.2(22)申请日 2019.03.22(71)申请人 中国农业大学地址 100094 北京市海淀区圆明园西路2号(72)发明人 李春燕 牛飞飞 张源 何志巍 周梅 (74)专利代理机构 北京众合诚成知识产权代理有限公司 11246代理人 黄家俊(51)Int.Cl.H05K 9/00(2006.01)G01V 7/02(2006.01)(54)发明名称一种超导磁悬浮系统的磁屏蔽装置及方法(57)摘要本发明公开了属于重力测试领域的一种超导磁悬浮系统的磁屏蔽装置及方法;装置中超导磁悬浮系统、内屏蔽层和本体加热器均封装于真空腔中,超导磁悬浮系统通过环氧支撑骨架竖直悬挂于真空腔封盖下方,且本体加热器固定于超导磁悬浮系统旁,用于控制磁悬浮球和内屏蔽层的温度,内屏蔽层通过其底部的内屏蔽层底部螺孔栓接于超导磁悬浮系统外围;外屏蔽层通过真空腔外壳底部的外屏蔽层底部螺孔将其栓接于真空腔外壳的外围,外屏蔽层和真空腔外壳置于液氦中。
同时还提供了磁屏蔽方法。
本发明装置结构简单,方法简便,可以有效的抑制外界磁场的干扰,为超导磁悬浮系统提供稳定的工作环境。
权利要求书2页 说明书7页 附图4页CN 109862771 A 2019.06.07C N 109862771A1.一种超导磁悬浮系统的磁屏蔽装置,其特征在于,主要包括:超导磁悬浮系统(1)、内屏蔽层(2)、环氧支撑骨架(3)、真空腔封盖(4)、真空腔外壳(10)、真空腔(5)、外屏蔽层(6)和本体加热器(15),其中真空腔外壳(10)为圆柱形筒状结构,真空腔封盖(4)固接于真空腔外壳(10)的上端开口外,真空腔封盖(4)和真空腔外壳(10)围成真空腔(5);超导磁悬浮系统(1)、内屏蔽层(2)和本体加热器(15)均封装于真空腔(5)中,超导磁悬浮系统(1)通过环氧支撑骨架(3)竖直悬挂于真空腔封盖(4)下方,且本体加热器(15)固定于超导磁悬浮系统(1)旁,用于控制磁悬浮球(12)和内屏蔽层(2)的温度,内屏蔽层(2)通过其底部的内屏蔽层底部螺孔(7)栓接于超导磁悬浮系统(1)外围;外屏蔽层(6)通过真空腔外壳(10)底部的外屏蔽层底部螺孔(8)将其栓接于真空腔外壳(10)的外围,外屏蔽层(6)和真空腔外壳(10)置于液氦中。
【CN109881439A】一种磁悬浮控制装置、滚筒洗衣机及其磁悬浮控制方法【专利】
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910238615.0(22)申请日 2019.03.27(71)申请人 珠海格力电器股份有限公司地址 519070 广东省珠海市香洲区前山金鸡西路789号(72)发明人 王习文 张俊雄 陈鍚鍚 阳康 汪随 (74)专利代理机构 北京煦润律师事务所 11522代理人 朱清娟 梁永芳(51)Int.Cl.D06F 37/20(2006.01)D06F 33/02(2006.01)(54)发明名称一种磁悬浮控制装置、滚筒洗衣机及其磁悬浮控制方法(57)摘要本发明公开了一种磁悬浮控制装置、滚筒洗衣机及其磁悬浮控制方法,该装置包括:所述传感装置,用于获取待控制的滚筒洗衣机在运行过程中内筒转子运行不平衡时内筒的偏心量,并获取所述滚筒洗衣机在运行过程中的磁场强度;所述控制器,用于根据所述偏心量动态调节所述滚筒洗衣机的磁悬浮模块中磁极的磁驱力;和/或,还用于根据所述磁场强度对内筒转子旋转的转速和位置进行校正。
本发明的方案,可以解决磁悬浮滚筒洗衣机在受到较大外部干扰时以及衣物在不同位置时偏心力不一样,导致内筒失稳偏离平衡位置,造成悬浮对象悬浮失败的问题,达到避免悬浮对象悬浮失败的效果。
权利要求书3页 说明书13页 附图5页CN 109881439 A 2019.06.14C N 109881439A权 利 要 求 书1/3页CN 109881439 A1.一种磁悬浮控制装置,其特征在于,包括:传感装置和控制器;其中,所述传感装置,用于获取待控制的滚筒洗衣机在运行过程中内筒转子运行不平衡时内筒的偏心量,并获取所述滚筒洗衣机在运行过程中的磁场强度;所述控制器,用于根据所述偏心量动态调节所述滚筒洗衣机的磁悬浮模块中磁极的磁驱力;和/或,还用于根据所述磁场强度对内筒转子旋转的转速和位置进行校正。
2.根据权利要求1所述的装置,其特征在于,其中,所述控制器根据所述偏心量动态调节所述滚筒洗衣机的磁悬浮模块中磁极的磁驱力,包括:根据所述偏心量确定所述磁悬浮模块中相邻两磁极绕组的磁驱动力的校正量;根据给定电流与定子对转子的悬浮力之间的对应解耦关系,确定与所述校正量对应的当前给定电流;根据所述当前给定电流调节相邻两磁极绕组的磁场强度,进而调节磁极对应的磁驱动力;和/或,所述控制器根据所述磁场强度对内筒转子旋转的转速和位置进行校正,包括:根据所述磁场强度确定内筒磁道所在的当前位置;确定所述当前位置与设定位置之间的偏差值是否超过设定阈值;若所述偏差值超过所述设定阈值,则根据所述偏差值对内筒转子旋转的转速进行校正。
【CN109826868A】一种混合型磁浮轴承系统【专利】
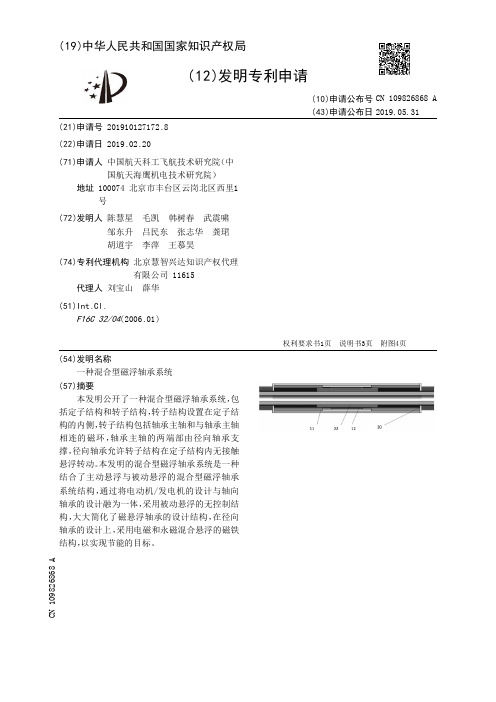
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910127172.8(22)申请日 2019.02.20(71)申请人 中国航天科工飞航技术研究院(中国航天海鹰机电技术研究院)地址 100074 北京市丰台区云岗北区西里1号(72)发明人 陈慧星 毛凯 韩树春 武震啸 邹东升 吕民东 张志华 龚珺 胡道宇 李萍 王慕昊 (74)专利代理机构 北京慧智兴达知识产权代理有限公司 11615代理人 刘宝山 薛华(51)Int.Cl.F16C 32/04(2006.01)(54)发明名称一种混合型磁浮轴承系统(57)摘要本发明公开了一种混合型磁浮轴承系统,包括定子结构和转子结构,转子结构设置在定子结构的内侧,转子结构包括轴承主轴和与轴承主轴相连的磁环,轴承主轴的两端部由径向轴承支撑,径向轴承允许转子结构在定子结构内无接触悬浮转动。
本发明的混合型磁浮轴承系统是一种结合了主动悬浮与被动悬浮的混合型磁浮轴承系统结构,通过将电动机/发电机的设计与轴向轴承的设计融为一体,采用被动悬浮的无控制结构,大大简化了磁悬浮轴承的设计结构,在径向轴承的设计上,采用电磁和永磁混合悬浮的磁铁结构,以实现节能的目标。
权利要求书1页 说明书3页 附图4页CN 109826868 A 2019.05.31C N 109826868A权 利 要 求 书1/1页CN 109826868 A1.一种混合型磁浮轴承系统,其特征在于,包括定子结构和转子结构,转子结构设置在定子结构的内侧,转子结构包括轴承主轴和与轴承主轴相连的磁环,轴承主轴的两端部由径向轴承支撑,径向轴承允许转子结构在定子结构内无接触悬浮转动。
2.根据权利要求1所述的混合型磁浮轴承系统,其特征在于,转子结构的所述磁环为环形海尔贝克永久磁铁阵列。
3.根据权利要求2所述的混合型磁浮轴承系统,其特征在于,环形海尔贝克永久磁铁阵列通过连接组件与轴承主轴固定连接以组成转子结构,环形海尔贝克永久磁铁阵列设置于轴承主轴的中部。
一种磁悬浮平衡轴系统[发明专利]
![一种磁悬浮平衡轴系统[发明专利]](https://img.taocdn.com/s3/m/39f3aa61bceb19e8b9f6ba08.png)
专利名称:一种磁悬浮平衡轴系统
专利类型:发明专利
发明人:黄康,段松林,薛永昌,高峰,马加奇,潘毅申请号:CN201510652250.8
申请日:20151008
公开号:CN105150795A
公开日:
20151216
专利内容由知识产权出版社提供
摘要:本发明公开了一种磁悬浮平衡轴系统,其特征是:设置平衡轴壳与平衡轴芯轴为一体式结构,从而形成新式平衡轴壳;使得新式平衡轴壳、平衡轴支架与平衡轴套之间能形成两种位置关系;设置一控制系统;并分别与平衡轴套壳两端的零部件相连。
本发明能改变各零部件之间的连接和传动方式,使平衡轴系统有较高的适应性,改善其受力情况,从而增加结构的可靠性与使用寿命。
申请人:合肥工业大学,合肥工业大学(马鞍山)高新技术研究院,安徽福马汽车零部件集团有限公司地址:230009 安徽省合肥市包河区屯溪路193号
国籍:CN
代理机构:安徽省合肥新安专利代理有限责任公司
更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910127178.5
(22)申请日 2019.02.20
(71)申请人 中国航天科工飞航技术研究院(中
国航天海鹰机电技术研究院)
地址 100074 北京市丰台区云岗北区西里1
号
(72)发明人 陈慧星 毛凯 张艳清 武震啸
邹东升 胡道宇 吕民东 龚珺
王慕昊 李萍
(74)专利代理机构 北京慧智兴达知识产权代理
有限公司 11615
代理人 刘宝山 薛华
(51)Int.Cl.
B60L 13/04(2006.01)
(54)发明名称
一种磁悬浮系统
(57)摘要
本发明公开了一种磁悬浮系统,包括磁悬浮
轨道和悬浮于磁悬浮轨道上方的磁悬浮车体,所
述磁悬浮车体的下方设置有磁轮,
所述磁悬浮轨道上形成有磁轮导轨,磁悬浮车体上的所述磁轮
可容纳在磁悬浮轨道上的所述磁轮导轨中,磁悬
浮车体通过所述磁轮与所述磁轮导轨在相对转
动下产生的电磁斥力保持静态和动态悬浮。
本发
明的磁悬浮系统解决了传统被动式悬浮系统不
能静态悬浮的问题,取消了传统被动式磁浮列车
低速下的支撑轮或导向轮等支撑导向结构,降低
了车辆的建造成本以及系统的建设成本。
权利要求书1页 说明书3页 附图2页CN 109823192 A 2019.05.31
C N 109823192
A
权 利 要 求 书1/1页CN 109823192 A
1.一种磁悬浮系统,包括磁悬浮轨道和悬浮于磁悬浮轨道上方的磁悬浮车体,其特征在于,所述磁悬浮车体的下方设置有磁轮,所述磁悬浮轨道上形成有磁轮导轨,磁悬浮车体上的所述磁轮可容纳在磁悬浮轨道上的所述磁轮导轨中,磁悬浮车体通过所述磁轮与所述磁轮导轨之间的电磁斥力保持静态和动态悬浮。
2.根据权利要求1所述的磁悬浮系统,其特征在于,所述磁轮为圆柱体型的海尔贝克磁轮,海尔贝克磁轮中具有由永久磁铁排列而成的海尔贝克磁环,旋转的磁轮与所述磁轮轨道之间产生电磁斥力以将磁悬浮车体保持静态和动态悬浮。
3.根据权利要求2所述的磁悬浮系统,其特征在于,所述磁轮包括海尔贝克磁环和驱动海尔贝克磁环转动的旋转电机。
4.根据权利要求3所述的磁悬浮系统,其特征在于,所述旋转电机设置在海尔贝克磁环的一侧,海尔贝克磁环与旋转电机通过电机主轴固定,以使海尔贝克磁环的转速与旋转电机的转速同步。
5.根据权利要求3所述的磁悬浮系统,其特征在于,所述旋转电机为可调速电机。
6.根据权利要求2所述的磁悬浮系统,其特征在于,所述磁轮包括多个且设置在磁悬浮车体的底部边缘位置,多个磁轮同步旋转产生电磁斥力以支撑磁悬浮车体。
7.根据权利要求2所述的磁悬浮系统,其特征在于,磁轮导轨呈柱形槽状以容纳磁轮。
8.根据权利要求7所述的磁悬浮系统,其特征在于,所述磁悬浮轨道呈U字形,磁轮导轨设置于磁悬浮轨道内侧的凹角位置,磁悬浮轨道中的磁轮导轨为对称结构,磁轮导轨的横截面由3/4段圆弧和90度开口角组成,90度开口角的中线与水平线的夹角为45度。
9.根据权利要求7所述的磁悬浮系统,其特征在于,磁悬浮车体底部设置有直线感应电机为电机初级,磁悬浮轨道内安装感应板作为电机次级,以驱动磁悬浮车体在低速下运行。
10.根据权利要求7所述的磁悬浮系统,其特征在于,磁悬浮车体底部设置长定子直线同步电机和由直线同步电机驱动移动的海尔贝克直线型永磁阵列为电机初级,磁悬浮轨道内铺设绕组线圈为电机次级,或者悬浮车体底部设置高温/低温超导磁体作电机初级,磁悬浮轨道内铺设绕组线圈为电机次级,以驱动磁悬浮车体在高速下运行。
2。