附--磁悬浮系统模型
实验室磁悬浮球系统数学模型的建立

其 中,
∽ = +— 盟 一 I —
1
F i)粤 e, : (y A A
() 2
一 —
21 / 2I ’ a+ : a + ( ) (
+ 粤
. A y
( 、) 8 一
V 一。 2 (+ a1 I
将式( 代人式( 得 2 ) 1 )
2 l . +— o一) a _
《 装备制造技术}0 2 2 1 年第 2 期
实验 室磁悬浮球 系统数学模型 的建立
于建立 , 崔亚君 , 高峰娟
( 海军航空工程学院 青岛分院 , 山东 青岛 264 ) 60 1
摘 要: 通过对磁悬浮球 系统中小球的受力分析, 建立了磁悬浮球系统的数学模型, 并通过实验测得所需各种参数 , 将数
作者简 介 : 于建立 (92 ) 男 , 17一 , 山东潍 坊人 , 师 , 讲 研究方 向 : 仪器仪表测试技术 ; 崔亚君(99 ) 女 , 17一 , 辽宁营 口人 , 讲师 , 研究方 向: 仪器仪表测试技术 。
41
E u p n Ma u a t n e h oo y No2, 0 2 q i me t n f cr g T c n lg . 2 1 i
学模型具体化 。
关键词 : 磁悬浮球 ; 学模型 ; 数 控制 中图分类号 : P 7 T 23 文献标识码 : A 文章编 号 :6 2 5 5 ( 0 2 0 — 0 1 0 1 7 — 4 X 2 1 )2 0 4 — 3
磁悬浮技术的特点, 是利用磁场力将物体悬浮 1 磁悬浮小球控制 系统 受力分析 起来 ,使悬浮体 与支撑体之间没有任何机械接触的
一
种新型技术 , 其具有无噪声 、 无磨损 、 能耗低 、 寿命
磁悬浮模型制作

磁悬浮模型制作磁悬浮模型制作是一项精密的工艺,通过利用磁力原理,使物体悬浮在空中,给人一种梦幻般的感觉。
它不仅可以用作装饰品,还可以作为科学实验的展示模型。
下面我们就来介绍一下磁悬浮模型制作的步骤和方法。
首先,我们需要准备一些基本的材料:磁铁、导线、电池、铁块、木板等。
这些材料在市场上都能够很容易找到,而且价格也相对较低,非常适合制作磁悬浮模型。
接下来,我们需要根据所需的模型形状,制作木板的框架。
可以根据自己的喜好选择不同的形状,比如长方形、正方形等等。
将木板切割成相应的形状,并将它们用胶水或钉子固定在一起,形成一个三维的框架。
然后,我们需要在木板框架的底部固定一个铁块。
这个铁块将会是模型的底座,起到稳定模型的作用。
可以使用胶水或者钉子将铁块固定在木板上,确保它的位置稳固可靠。
接下来,我们需要将电池和导线连接起来,制作一个简单的电路。
将电池的正极和导线的一端相连接,再将导线的另一端与磁铁相连接。
这样,电流就能够通过导线流动到磁铁上,产生磁力效应。
然后,我们需要将磁铁固定在木板框架的顶部。
可以使用胶水或者绳子将磁铁固定在木板上,确保它的位置牢固不动。
需要注意的是,磁铁的极性要与导线连接的方向相一致,这样才能够产生磁悬浮的效果。
最后,我们需要调整磁铁和导线的位置,以确保磁悬浮的效果达到最佳状态。
可以通过增加或减少导线的弯曲度、调整电流的大小等方法来实现。
需要多次尝试和调整,直到找到合适的位置和参数。
通过以上的步骤,一个简单的磁悬浮模型就制作完成了。
当我们将模型放置在桌面上时,它会悬浮在空中,给人一种很神奇的感觉。
这个模型不仅可以用于装饰,还可以用作教学、科普和实验等方面,让人们更加直观地了解磁力效应。
当然,上述仅仅是一个简单的磁悬浮模型制作方法,实际上还有很多其他的制作方法和技巧。
通过不同的材料和设计,我们可以制作出各种形状和风格的磁悬浮模型,进一步丰富模型的外观和功能。
总之,磁悬浮模型制作是一项有趣且具有挑战性的工作。
基于改进ESO的磁悬浮系统模型参考滑模控制

基于改进ESO的磁悬浮系统模型参考滑模控制胡坤;蒋庆楠;季晨光;杨健;李飞【期刊名称】《工程设计学报》【年(卷),期】2022(29)1【摘要】为了提高磁悬浮输送带的稳定性,减小未建模动态和未知外界干扰对磁悬浮系统控制性能的影响,基于改进的扩张状态观测器(extend state observer,ESO)技术,提出了一种模型参考滑模控制与基于改进趋近律的滑模控制相结合的控制策略。
首先,对参考模型进行滑模设计,在此基础上根据磁悬浮系统的快速响应和鲁棒性要求,结合幂次趋近律和指数趋近律对传统趋近律进行改进,设计了一种基于新型趋近律的滑模控制;其次,设计了一种新的非线性函数对ESO进行改进,基于改进的ESO对系统的扰动和状态进行观测和估计,将观测结果加入新型滑模控制器以对外界干扰进行补偿,来提高新型滑模控制器的控制性能。
仿真结果表明:所设计的控制策略与传统基于指数趋近律的滑模控制相比,磁悬浮系统气隙输出的超调量减小了15.15%,系统具有更高的鲁棒性;与基于改进趋近律的滑模控制方法相比,所提出的控制器可以使系统无抖振,有更好的跟踪性能。
在基于改进ESO的模型参考滑模控制下,磁悬浮系统能够稳定运行,具有较好的控制性能。
研究结果对磁悬浮输送机输送带的悬浮控制具有一定的参考价值。
【总页数】10页(P82-91)【作者】胡坤;蒋庆楠;季晨光;杨健;李飞【作者单位】安徽理工大学深部煤矿采动响应与灾害防控国家重点实验室;安徽理工大学机械工程学院【正文语种】中文【中图分类】TP13;TP273【相关文献】1.改进参考轨迹的滑模预测控制在磁悬浮轴承的应用2.基于ESO的轧机主传动非线性延时系统动态滑模控制3.基于滑模ESO转速辨识的永磁同步电机滑模自抗扰控制4.基于等价输入干扰滑模观测器的磁悬浮球系统模型预测控制5.基于ESO的永磁同步电机位置伺服系统滑模变结构反步控制因版权原因,仅展示原文概要,查看原文内容请购买。
高考回归复习—电磁感应之磁悬浮列车类模型(word 含答案)

高考回归复习—电磁感应之磁悬浮列车类模型1.如图所示,两条相距d的平行金属导轨位于同一水平面内,其右端接一阻值为R的电阻.质量为m的金属杆静置在导轨上,其左侧的矩形匀强磁场区域MNPQ的磁感应强度大小为B、方向竖直向下.当该磁场区域以速度v0匀速地向右扫过金属杆后,金属杆的速度变为v.导轨和金属杆的电阻不计,导轨光滑且足够长,杆在运动过程中始终与导轨垂直且两端与导轨保持良好接触.求:(1)MN刚扫过金属杆时,杆中感应电流的大小I;(2)MN刚扫过金属杆时,杆的加速度大小a;(3)PQ刚要离开金属杆时,感应电流的功率P.2.某研学小组设计了一个辅助列车进站时快速刹车的方案。
如图所示,在站台轨道下方埋一励磁线圈,通电后形成竖直方向的磁场(可视为匀强磁场)。
在车身下方固定一矩形线框,利用线框进入磁场时所受的安培力,辅助列车快速刹车。
已知列车的总质量为m,车身长为s,线框的短边ab和cd分别安装在车头和车尾,长度均为L(L小于匀强磁场的宽度),整个线框的电阻为R。
站台轨道上匀强磁场区域足够长(大于车长s),车头进入磁场瞬间的速度为v0,假设列车停止前所受铁轨及空气阻力的合力恒为f。
已知磁感应强度的大小为B,车尾进入磁场瞬间,列车恰好停止。
(1)求列车车头刚进入磁场瞬间线框中的电流大小I和列车的加速度大小a;(2)求列车从车头进入磁场到停止所用的时间t;(3)请你评价该设计方案的优点和缺点。
(优、缺点至少一种)。
3.某种超导磁悬浮列车是利用超导体的抗磁作用使列车车体向上浮起,同时通过周期性地变换磁极方向而获得推进动力。
其推进原理可以简化为如图所示的模型:在水平面上相距b 的两根平行直导轨间,有竖直方向等距离分布的方向相反的匀强磁场1B 和2B ,且12B B B ==,每个磁场分布区间的长都是a ,相间排列,所有这些磁场都以速度v 向右匀速平动.这时跨在两导轨间的长为a 宽为b 的金属框MNQP (悬浮在导轨正上方)在磁场力作用下也将会向右运动.设金属框的总电阻为R ,运动中所受到的阻力恒为f ,求:(1)列车在运动过程中金属框产生的最大电流; (2)列车能达到的最大速度;(3)在(2)情况下每秒钟磁场提供的总能量。
直线单级倒立摆系统建模与磁悬浮建模与模型
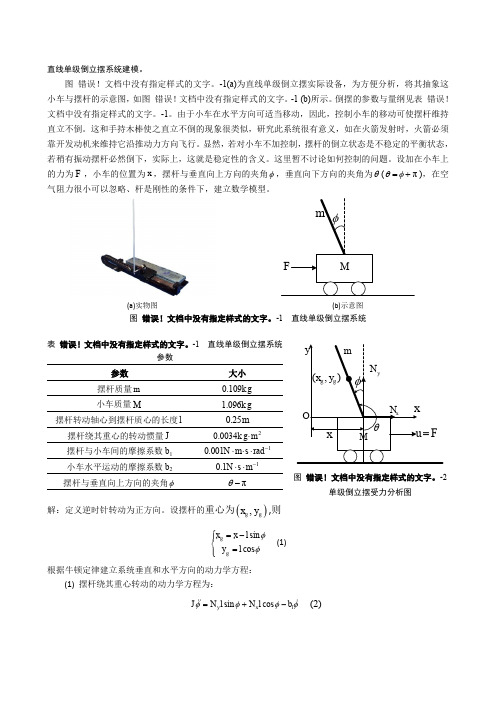
直线单级倒立摆系统建模。
图 错误!文档中没有指定样式的文字。
-1(a)为直线单级倒立摆实际设备,为方便分析,将其抽象这小车与摆杆的示意图,如图 错误!文档中没有指定样式的文字。
-1 (b)所示。
倒摆的参数与量纲见表 错误!文档中没有指定样式的文字。
-1。
由于小车在水平方向可适当移动,因此,控制小车的移动可使摆杆维持直立不倒。
这和手持木棒使之直立不倒的现象很类似,研究此系统很有意义,如在火箭发射时,火箭必须靠开发动机来维持它沿推动力方向飞行。
显然,若对小车不加控制,摆杆的倒立状态是不稳定的平衡状态,若稍有振动摆杆必然倒下,实际上,这就是稳定性的含义。
这里暂不讨论如何控制的问题。
设加在小车上的力为F ,小车的位置为x ,摆杆与垂直向上方向的夹角φ,垂直向下方向的夹角为θ(πθφ=+),在空气阻力很小可以忽略、杆是刚性的条件下,建立数学模型。
(a)实物图(b)示意图图 错误!文档中没有指定样式的文字。
-1 直线单级倒立摆系统表 错误!文档中没有指定样式的文字。
-1 直线单级倒立摆系统参数参数 大小 摆杆质量m 0.109kg 小车质量M1.096k g摆杆转动轴心到摆杆质心的长度l 0.25m摆杆绕其重心的转动惯量J 20.0034k g m ⋅摆杆与小车间的摩擦系数b 1 10.001N m s rad -⋅⋅⋅ 小车水平运动的摩擦系数b 2 10.1N s m -⋅⋅摆杆与垂直向上方向的夹角φπθ-图 错误!文档中没有指定样式的文字。
-2单级倒立摆受力分析图解:定义逆时针转动为正方向。
设摆杆的重心为(),g g x y ,则sin cos g gx x l y l φφ=-⎧⎪⎨=⎪⎩ (1) 根据牛顿定律建立系统垂直和水平方向的动力学方程:(1) 摆杆绕其重心转动的动力学方程为:1sin cos y x J N l N l b φφφφ=+- (2)式中,J 为摆杆绕其重心的转动惯量:22112123J mL L l ml ==。
高速列车磁悬浮系统动力学建模与仿真
高速列车磁悬浮系统动力学建模与仿真在当今社会,高速列车磁悬浮系统已经成为了一种极为先进的交通工具。
与传统的轨道交通工具相比,磁悬浮列车拥有更高的速度、更多的功能以及更为先进的技术。
所以,对于磁悬浮列车的研究和探索已经成为当今学术研究的热点之一。
磁悬浮列车的动力学建模是研究磁悬浮系统的重要方法之一。
动力学建模是运用数学和物理学的方法分析系统运动的特征,目的是确定系统的动力学特性,从而导出系统的动态响应。
在磁悬浮列车领域,动力学建模的核心是悬浮系统和牵引系统的耦合分析,其主要方法是建立悬浮系统与车辆质量和气动特性的运动方程。
因此,磁悬浮列车的动力学建模和仿真分析是研究磁悬浮列车的一项重要任务。
在磁悬浮列车动力学建模的实践中,采用多种方法对磁悬浮列车的运动机理进行建模和仿真分析。
其中,最为常见的方法是采用有限元分析法和计算流体力学方法。
在有限元分析中,可以将车辆与轨道系统的耦合建模为二维或三维问题,并采用有限元方法进行建模和仿真。
而在计算流体力学方法的分析中,一般是采用CFD软件对列车的气动特性进行分析与仿真。
基于上述方法,我们可以对高速列车磁悬浮系统进行动力学建模与仿真。
在建立动力学模型之前,首先需要对磁悬浮列车的基本结构进行分析,以便建立适当的数学模型。
磁悬浮列车的基本结构包括悬浮系统、牵引系统和车身系统。
悬浮系统由电磁铁和永磁体组成,通过电磁原理实现车辆的悬浮;牵引系统则由电机、变频器或牵引变流器等组成,通过电力传动来实现车辆的前进;车身系统则包括车厢、车门等,其主要功能是载客和保障乘客安全。
在建立数学模型之后,需要进行仿真分析。
仿真分析的目的是对列车运动过程进行模拟,预测列车的响应特性和运动稳定性。
在仿真分析中,需要考虑诸多因素,包括列车速度、风阻力、悬浮系统的刚度和阻尼等。
此外,应当考虑车辆的运动特性和动态特性,如动力学特性、悬浮系统特性、牵引系统特性等。
在处理这些因素时,需要使用数学方法、物理量和能量守恒原理等基本理论分析列车的运动规律和性能特点。
高速列车的悬浮系统的模型设计与优化
高速列车的悬浮系统的模型设计与优化概述:高速列车的悬浮系统是保障列车安全平稳行驶的重要组成部分。
本文将探讨高速列车悬浮系统的模型设计与优化方法,以提高列车行驶的平稳性、舒适性和安全性。
一、高速列车悬浮系统的作用和原理悬浮系统是将列车与轨道之间的接触力减小至最小,使列车脱离地面进行运行的重要技术。
其主要作用有:1. 减小摩擦阻力,提高列车的速度和能效。
2. 减小振动和噪音,提高乘坐舒适性。
3. 提高列车通过弯道和坡度的稳定性和安全性。
高速列车悬浮系统一般有磁悬浮和气动悬浮两种主要类型。
磁悬浮系统利用电磁力将列车悬浮在轨道上,而气动悬浮系统则利用气垫将列车悬浮起来。
不同类型的悬浮系统有不同的原理和设计要求,这里将以磁悬浮系统为例进行讨论。
二、高速列车磁悬浮系统的模型设计高速列车磁悬浮系统的模型设计是基于列车的运行要求和轨道的特点进行的。
以下是一些关键的设计考虑因素:1. 系统稳定性:磁悬浮系统需要具备良好的稳定性,以确保列车在高速运行时不会产生剧烈的振动和摇晃。
这需要将系统模型中包括列车质量、磁悬浮力、电磁力等要素进行合理的调整和优化。
2. 动力系统设计:磁悬浮系统的动力系统是列车能够正常运行的关键。
动力系统包括电动机、变频器、电源控制等组成部分。
模型设计需要合理的选择和配置这些设备,以确保列车在各种工况下都能够稳定运行。
3. 轨道设计:磁悬浮系统的轨道设计是很重要的一环,它直接影响到系统的稳定性和列车的运行效果。
合理的轨道设计可以减小列车与轨道之间的摩擦力,提高行车的平稳性和安全性。
4. 控制系统设计:磁悬浮系统的控制系统是确保列车按照预定要求运行的关键。
控制系统需要设计合理的反馈和控制算法,以调整和控制列车的悬浮高度、速度等参数。
同时,控制系统还需要具备自动保护和故障诊断功能,以提高列车的安全性和可靠性。
三、高速列车磁悬浮系统的优化方法高速列车磁悬浮系统的优化方法可以基于数值模拟和实际测试进行。
磁悬浮轴承系统的模型辨识与控制
磁悬浮轴承系统的模型辨识与控制周亮,甘杨俊杰(中车株洲电机有限公司,湖南 株洲 412000)摘要:对某磁悬浮轴承系统进行了理论建模,并进行了试验。
由于建模时忽略了功率放大器和位移传感器的影响,磁悬浮轴承系统理论模型与其实际特性有较大差异,磁悬浮轴承系统是一个三阶模型,而非理论模型的二阶模型,基于理论模型设计的控制器难以获得较好的控制性能,建模时需考虑功率放大器和位移传感器的影响。
为优化控制性能,采用频域辨识法对实际系统进行模型辨识,得到系统的频率特性,并对辨识数据进行模型拟合。
在辨识得到的三阶模型基础上,采用极点配置法重新设计控制器,对转子进行悬浮控制,转子稳定悬浮时的位移波动量降低了约60%。
关键词:磁悬浮轴承;滑动轴承;控制器;模型辨识;传递函数中图分类号:TH133.3;TP273 文献标志码:B DOI:10.19533/j.issn1000-3762.2021.01.001ModelIdentificationandControlofActiveMagneticBearingSystemZHOULiang,GAN-YANGJunjie(CRRCZhuzhouElectricCo.,Ltd.,Zhuzhou412000,China)Abstract:Thetheoreticalmodelissetupandexperimentiscarriedoutforanactivemagneticbearingsystem.Thereisalargedifferencebetweentheoreticalmodelandactualcharacteristicsofactivemagneticbearingsystemduetoneglec tingtheeffectofpoweramplifieranddisplacementsensorduringmodeling,whichthemodelofactivemagneticbearingsystemisathird-ordermodelratherthanasecond-ordermodelbytheoreticalmodeling,andthecontrollerdesignedbasedontheoreticalmodelisdifficulttoobtaingoodcontrolperformance,theeffectofpoweramplifieranddisplacementsensorshouldbetakenintoaccountduringmodeling.Inordertooptimizethecontrolperformance,themodelidentifica tioniscarriedoutforactualsystembyusingfrequencydomainidentificationmethod.Thefrequencycharacteristicsofthesystemareobtained,andthemodelfittingiscarriedoutforidentifieddata.Basedonthird-ordermodelobtainedbyidentification,thecontrollerisredesignedtosuspendtherotorbyadoptingpoleassignmentmethod.Thedisplace mentfluctuationisreducedabout60%whentherotorissuspendedstably.Keywords:activemagneticbearing;slidingbearing;controller;modelidentification;transferfunction 磁悬浮轴承因具有无摩擦、无磨损以及无需润滑等一系列优点,在高速主轴、气体压缩机、人工心脏泵、飞轮储能等领域广泛应用[1]。
自稳定磁悬浮系统的完整建模

V0 1 . 4 2 No . S 2
红 外 与 激 光 工 程
I n f r a r e d a n d La s e r En g i n e e r i n g
2 0 1 3年 1 2月
De c . 2 0 1 3
自稳 定 磁 悬 浮 系统 的 完 整 建模
关键词: 磁 悬浮 ; 自稳定 ; 建模 ; 驱动 电磁 场 ; 仿 真
中 图分类 号 : T M3 0 1 . 2 文 献标 志码 : A 文 章 编 号 :1 0 0 7 — 2 2 7 6 ( 2 0 1 3 ) ¥ 2 — 0 4 8 5 — 0 7
Co mp l e t e mo d e l i ng o f s e l f - s t a b i l i z i n g ma g n e t i c s u s p e n s i o n s y s t e m
完整模型 。 该模 型模拟 不带电中子 自旋运动 , 以对 中子进行磁约束 , 与传统 简化模 型相 比, 适用情况更广、 更
加 准确 。同时在磁 悬浮 系统 中利 用亥姆霍兹线 圈产 生驱动磁 场 , 驱动 转子稳定 、 长时间悬浮转动 , 进 而通过
调 节驱动磁场频率改变转子 旋转速度 。最后通过 MA T L A B对模型进行 了仿真验证 。
Wa n Yu e l i ng a ,W a ng Ti ny a i 2 ,Ya h Li a n g 2
( 1 . C o l l e g e o f Co mp u t e r S c i e n c e a n d T e c h n o l o g y ,B e i j i n g T e c h n o l o g y nd a B u s i n e s s Un i v e r s i t y ,B e i j / t u g 1 0 0 0 4 8 , C h i n a ; 2 .S c h o o l o f Au t o ma t i o n S c i e n c e nd a E l e c t r i c a l E n g i n e e r i n g , Be i h ng a U iv n e si r t y , B e i j i n g 1 0 0 1 9 1 , C h i n a ) Ab s t r a c t :Ho w t o n e u t r o n ma g n e ic t c o n in f e me n t i n c o n t r o l l d t e he r mo n u c l e a r f us i o n wa s a h o t r e s e rc a h
磁悬浮列车工作原理知识讲解

根据Meissner效应,车 与轨之间产生电动斥 力,(数量级为103N/m2)从 而实现悬浮.
2.悬浮系统
导向系统依靠轨道两侧的线 圈,按照实际所需的横向倾角 的大小,对线圈中的交变电流 进行调节,进而提供所需的导 向力.
假设转子受到扰动,偏离其 参考位置,这时传感器检测 出转子偏离参考点的位移, 控制器将检测的位移变换成 控制信号,然后功率放大器 将信号转换成控制电流,并 在执行磁铁中产生磁力,从 而驱动转子返回到原来平衡 位置。因此,不论转子受到 哪个方向的扰动,转子始终 能处于稳定的平衡状态。
3.动力推进系统
• 直观模拟:轨道两侧装有线 圈,交流电使线圈变为电 磁体,它与列车上的磁铁 相互作用。列车行驶时,车 头的磁铁(N极)被轨道 上靠前一点的电磁体(S 极)所吸引,同时被轨道上 稍后一点的电磁体(N极) 所排斥,使列车前进。然后 在线圈里流动的电流反向, 其结果就是原来那个S极 线圈,现在变为N极线圈 了,反之亦然。 这样,列车由于电磁 极性的转换而得以持续向 前奔驰。
2.转子板或反应轨内部: A 1A m 1 ex i(k p x w {)z ˆt}
(1)
2t2 A1k2A1i0(wkv)A x1
3.在空气隙: A 2 A m 2 ex i(kp x w { )z ˆ} t
(1)
2A2 t2
k2A2
0
数学模拟(四)
电磁边界条件:
1.y=0转子板中心处:
2.y=b处的切向方向:
2
初略计算: P 0 = 19.7kw
可见,转子单位体积净输出功率的数量级为kw
性能比较(一)
1.安全: 不会脱轨; 单向行驶,不会相撞。
磁悬浮系统建模及其PID控制器设计

《Matlab仿真技术》设计报告题目磁悬浮系统建模及其PID控制器设计专业班级电气工程及其自动化11**班学号 2学生姓名 **指导教师**学院名称电气信息工程学院完成日期: 2014年 5 月 7 日磁悬浮系统建模及其PID控制器设计Magnetic levitation system base don PID controller simulation摘要磁悬浮技术具有无摩擦、无磨损、无需润滑以及寿命较长等一系列优点,在能源、交通、航空航天、机械工业与生命科学等高科技领域有着广泛得应用背景。
随着磁悬浮技术得广泛应用,对磁悬浮系统得控制已成为首要问题。
本设计以PID 控制为原理,设计出PID控制器对磁悬浮系统进行控制。
在分析磁悬浮系统构成及工作原理得基础上,建立磁悬浮控制系统得数学模型,并以此为研究对象,设计了PID控制器,确定控制方案,运用MATLAB软件进行仿真,得出较好得控制参数,并对磁悬浮控制系统进行实时控制,验证控制参数。
最后,本设计对以后研究工作得重点进行了思考,提出了自己得见解。
PID控制器自产生以来,一直就是工业生产过程中应用最广、也就是最成熟得控制器。
目前大多数工业控制器都就是PID控制器或其改进型。
尽管在控制领域,各种新型控制器不断涌现,但PID控制器还就是以其结构简单、易实现、鲁棒性强等优点,处于主导地位。
关键字:磁悬浮系统;PID控制器;MATLAB仿真一、磁悬浮技术简介1、概述:磁悬浮就是利用悬浮磁力使物体处于一个无摩擦、无接触悬浮得平衡状态,磁悬浮瞧起来简单,但就是具体磁悬浮悬浮特性得实现却经历了一个漫长得岁月。
由于磁悬浮技术原理就是集电磁学、电子技术、控制工程、信号处理、机械学、动力学为一体得典型得机电一体化高新技术。
伴随着电子技术、控制工程、信号处理元器件、电磁理论及新型电磁材料得发展与转子动力学得进一步得研究,磁悬浮随之解开了其神秘一方面。
1900年初,美国,法国等专家曾提出物体摆脱自身重力阻力并高效运营得若干猜想--也就就是磁悬浮得早期模型。
磁悬浮球系统的建模与仿真设计毕业设计
声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
学生签名:年月日新疆大学毕业论文(设计)任务书班级:自动化081 姓名:论文(设计)题目:磁悬浮球系统的建模与仿真设计专题:要求完成的内容: 1. 学习系统建模方法和熟练MATLAB语言。
2. 熟悉磁悬浮球控制系统的工作原理。
3. 建立磁悬浮球控制系统的数学模型。
4. 分析磁悬浮球控制系统的稳定性。
5. 磁悬浮球控制系统的控制器(PID,模糊)的设计。
6. 用SIMULINK建模进行仿真实验进行分析。
7. 编写毕业设计说明书。
发题日期:年月日完成日期:年月日实习实训单位:地点:论文页数:页;图纸张数:指导教师:教研室主任:院长:摘要磁悬浮技术是集电磁学、电子技术、控制工程、信号处理、机械学、动力学为一体的典型的机电一体化技术。
随着电子技术、控制工程、处理信号元器件、电磁理论及新型电磁材料的发展和转子动力学的进展,磁悬浮技术得到了长足的发展。
本实验平台可以使用多种控制器和控制方法,适用于相关人员的研究和实验工作。
研究和设计磁悬浮球控制系统实验平台是本文的主要工作,本文在分析磁悬浮球控制系统工作原理的基础上,设计了一套磁悬浮球控制系统实验平台。
本文着重介绍控制器的设计过程。
在此基础上,本文利用了MATLAB设计了基于计算机的磁悬浮PID传统控制和模糊PID控制器。
所研制的控制器软件设计方法简单、性能稳定、实时调试方便。
关键词:磁悬浮球控制系统;稳定性;传统PID控制器;模糊PID控制器ABSTRACTMagnetic Suspension is one of typical mechanics and electronics technology,which includes the electromagnetics, electron technology, control engineering, signaldisposal, mechanics and dynamics.As the electronic technology, control engineering, processing signal components, electromagnetic theory and the development of new electromagnetic material and the progress of the rotor dynamics, maglev technology got rapid progress. This experiment platform can use a variety of controller and the control method, apply to relevant personnel of research and experimental work.This thesis focuses on the research and design of Magnetic Suspension ball Control System testing platform. Based on analyzing of Magnetic Suspension ball Control system's working principle, the thesis designs a Magnetic Suspension ball Control System testing platform.The paper emphasizes the design process.On this basis, this paper use based on MATLAB design of magnetic levitation PID traditional computer control and fuzzy PID controller. The developed controller software design method is simple, stable performance, real-time debugging is convenient.Keywords: maglev ball control system;stability;the traditional PID controller;the fuzzy PID controller目录1 绪论 (5)1.1 磁悬浮技术综述 (5)1.1.1 前言 (5)1.1.2 磁悬浮方式的分类 (5)1.1.3 磁悬浮控制方法的现状与发展趋势 (5)1.2 课题的提出及意义 (6)1.3 本论文的工作及主要内容 (6)2 磁悬浮球系统组成及系统模型 (8)2.1 磁悬浮球系统组成 (8)2.2 磁悬浮球系统工作原理 (8)2.3 磁悬浮球系统的数学模型 (8)2.4 磁悬浮球系统闭环控制 (12)3 传统控制器的研究与设计 (13)3.1 引言 (13)3.2 控制器设计 (13)3.2.1 PID控制器基本控制规律 (13)3.2.1.1 比例控制器(P调节器) (13)3.2.1.2 积分控制器(I调节器) (14)3.2.1.3 微分控制器(D调节器) (15)3.2.1.4 比例-微分控制器(PD调节器) (15)3.2.1.5 比例-积分控制器(PI调节器) (16)3.2.1.6 比例-积分-微分控制器(PID调节器) (17)3.2.2 PID控制器的参数整定 (19)3.2.3 PID调节器参数的工程整定 (21)3.2.3.1工程实验法整定 (21)3.2.3.2 Ziegler-Nichols参数整定法 (22)3.3 磁悬浮球系统PID参数整定及系统仿真 (24)3.3.1 不加控制器时磁悬浮球系统及其系统仿真 (24)3.3.2 PID参数整定的步骤及系统仿真 (28)4 模糊PID控制器的设计 (32)4.1引言 (32)4.2模糊控制器简介 (32)4.2.1模糊控制的基本原理 (32)4.2.2 模糊控制器的结构 (32)4.3 模糊控制系统的设计 (34)4.3.1 模糊控制器的结构设计 (34)4.3.2 模糊控制器的基本设计 (35)4.3.3 模糊PID控制器结构及参数自整定原则 (36)4.3.4 模糊PID控制器的设计 (37)4.3.5 基于MATLAB的模糊PID控制系统的仿真研究 (39)5 总结与展望 (42)5.1总结 (42)5.2 今后的研究方向 (42)致谢 (43)1 绪论1.1 磁悬浮技术综述1.1.1 前言磁悬浮技术属于自动控制技术,它是随着控制技术的发展而建立起来的。
磁悬浮技术ppt课件

VIP有效期内享有搜索结果页以及文档阅读页免广告特权,清爽阅读没有阻碍。
知识影响格局,格局决定命运! 多端互通
抽奖特权
VIP有效期内可以无限制将选中的文档内容一键发送到手机,轻松实现多端同步。 开通VIP后可以在VIP福利专区不定期抽奖,千万奖池送不停!
福利特权
开通VIP后可在VIP福利专区定期领取多种福利礼券。
磁悬浮技术的原理及应用现状
曾励
——扬州大学机械工程学院
主要报告内容
一、磁悬浮系统的组成原理 二、磁悬浮技术的应用现状 三、磁悬浮技术的发展趋势
一、磁悬浮系统的组成原理
悬浮: 磁悬浮、电悬浮、气悬浮
磁悬浮基于磁拉(斥)力而悬浮,如图 所示。
x, F x0
U
F
2
2
dR dx
2 20 A
U2 2
0 A
1)电磁式:通过调整自身激磁电路本 身参数来实现固有稳定的悬浮。
2)永磁式:利用永磁体提供磁场能量 悬浮物体。
无源悬浮仅在偏离要求位置一定的范 围内稳定。
1)电磁式被动型磁悬浮技术 图2 电磁式被动型磁悬浮组成图
电磁式被动型磁悬浮工作原理图
L2
N 2A
g0 x
L1
N 2A
g0 x
L2
N 2A g0 x
12
3
10
4
11
5
6
12
7
13
8
14
15 16 9 17
多自由度无轴承电机
3.磁悬浮列车技术
4.磁悬浮飞机
特点: 1)运行中离开轨道 比磁悬浮列车更高, 距离有8至15厘米, 如同在轨道上“飞 行”; 2)时速非常高,可 达550公里/小时;
磁悬浮实验报告

开放性试验:《磁悬浮原理实验仪制作及PID控制》试验报告实验内容:学生通过磁悬浮有关知识的学习,根据已有的试验模型,设计出磁悬浮实验仪器,并进行制作,进而在计算机上用PID技术进行调节和控制。
难点:PID控制程序的编写及调试。
创新点:该实验以机械学院数控所得科研成果为依托,以一种新颖的方式,用磁悬浮小球直观的展示了PID控制理论的应用。
该仪器构造简单,成本低廉。
此实验综合应用了电磁场、计算机、机械控制等相关知识,具有一定的研究创新性特点。
该仪器有望成为中学物理实验仪器,和高校PID 控制实验仪器。
关键问题1.悬浮线圈的优化设计2.磁悬浮小球系统模型3.磁悬浮小球的PID控制电磁绕组优化设计小球质量:钢小球质量:15~20g小球直径:15mm悬浮高度:3mm要求:根据悬浮高度、小球大小、小球重量设计悬浮绕组绕组铁芯尺寸、线圈匝数、额定电流、线径。
电磁绕组优化设计:由磁路的基尔霍夫定律、毕奥-萨格尔定律和能量守恒定律,可得电磁吸力为:式中:μ0——空气磁导率,4πX10-7H/m ; A ——铁芯的极面积,单位m2; N ——电磁铁线圈匝数;z ——小球质心到电磁铁磁极表面的瞬时气隙,单位m ; i ——电磁铁绕组中的瞬时电流,单位A 。
功率放大器中放大元器件的最大允许电压为15V 。
为了降低功率放大器件上的压力差,减少功率放大器件的发热,设定悬浮绕组线圈电压该值为12V 。
约束条件:U =12V 电流、电压与电阻的关系电阻:L ——漆包线的总长度/m S ——漆包线的横截面积/m2d ——线径的大小/mε是漆包线线的电阻率,查表可知: ε=1.5*1.75*e-8,单位:Ω*m根据线圈的结构,可以得出漆包线的总长度为:2202⎪⎭⎫⎝⎛-=z i AN F μUi R=L R Sε=214S d π=11()ni L L a id dπ==+∑ 线圈的匝数为:综上所述,电磁力为:在线圈骨架几何尺寸和所加的电压固定的情况下,线圈漆包线线径d 越大,漆包线的长度L 越小,电磁力F 越大 。
磁悬浮系统的哈密顿建模和无源控制

b l n e r lto aa c e ai n,t e Po tCo tol d Ha ho in mo e fsn l - e r e fe d m g ei e iai n s s h r n r l mi n a d lo ig e d g e -r e o Ma n t l vtto y - e c
( c ol f uo a o ,H ri U ie i c nea dT cnl y H ri 5 00, hn ) Sho o A tm t n abn nvr t o Si c n ehoo , abn10 8 C i i syf e g a
Absr c I i w o h o l a h r ce itc o a n tc lv tt n s se , a p yn r-o told t a t:n ve ft e n n i rc a a trsi fM g e i e i i y tm ne ao p li g potc n r le Ha h n a y tms a d p si i - s d c n r lt e r mi o i n s se n a svt ba e o to h o y, t e mo ei g a d c n r lo a n tc lv tto y h d ln n o to fM g ei e iain s se i r s n e y t m s p e e td. M a n tc lv tt n wa iwe sa n r y ta so m ain d v c . Fr m h n r - g ei e i i sve d a n e eg —r n f r to e ie ao o tee eg y
维普资讯
第l 2卷
பைடு நூலகம்
磁悬浮系统建模及其PID控制器设计
《Matlab仿真技术》令狐采学设计报告题目磁悬浮系统建模及其PID控制器设计专业班级电气工程及其自动化11**班学号201110710247学生姓名**指导教师**学院名称电气信息工程学院完成日期:2014 年 5 月7 日令狐采学创作磁悬浮系统建模及其PID控制器设计Magnetic levitation system based on PID controller simulation摘要磁悬浮技术具有无摩擦、无磨损、无需润滑以及寿命较长等一系列优点,在能源、交通、航空航天、机械工业和生命科学等高科技领域有着广泛的应用背景。
随着磁悬浮技术的广泛应用,对磁悬浮系统的控制已成为首要问题。
本设计以PID控制为原理,设计出PID控制器对磁悬浮系统进行控制。
在分析磁悬浮系统构成及工作原理的基础上,建立磁悬浮控制系统的数学模型,并以此为研究对象,设计了PID控制器,确定控制方案,运用MATLAB软件进行仿真,得出较好的控制参数,并对磁悬浮控制系统进行实时控制,验证控制参数。
最后,本设计对以后研究工作的重点进行了思考,提出了自己的见解。
PID控制器自产生以来,一直是工业生产过程中应用最广、也是最成熟的控制器。
目前大多数工业控制器都是PID控制器或其改进型。
尽管在控制领域,各种新型控制器不断涌现,但PID控制器还是以其结构简单、易实现、鲁棒性强等优点,处于主导地位。
关键字:磁悬浮系统;PID控制器;MATLAB仿真一、磁悬浮技术简介1.概述:磁悬浮是利用悬浮磁力使物体处于一个无摩擦、无接触悬浮的平衡状态,磁悬浮看起来简单,但是具体磁悬浮悬浮特性的实现却经历了一个漫长的岁月。
由于磁悬浮技术原理是集电磁学、电子技术、控制工程、信号处理、机械学、动力学为一体的典型的机电一体化高新技术。
伴随着电子技术、控制工程、信号处理元器件、电磁理论及新型电磁材料的发展和转子动力学的进一步的研究,磁悬浮随之解开了其神秘一方面。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.1 磁悬浮系统的基本结构
磁悬浮控制系统主要由铁心、线圈、传感器、控制器、功率放大器及其控制对象刚体等元件组成。
系统结构如图2-1所示。
图2-1 磁悬浮系统结构图
Figure2-1 Structure diagram of magnetic levitation system
1.2 磁悬浮系统的工作原理
磁悬浮系统是利用电磁力来控制刚体悬浮的空间位置。
其工作原理是控制电磁铁绕组的电流,产生与刚体重量等价的电磁力,使得刚体稳定悬浮在平衡位置。
由于电磁力与悬浮气隙间存在非线性反比关系,这种平衡并不稳定,一旦受到外界干扰(如电压脉动或者风),刚体就会掉下来或被吸上去,因此必须实行闭环控制。
采用位置传感器在线获取刚体位置信号,控制器对位移信号进行处理产生控制信号,功率放大器根据控制信号产生所需电流并送往电磁铁,电磁铁产生相应磁力克服重力使得刚体稳定在平衡点附近。
当刚体受到干扰向下运动时,刚体与电磁铁的距离增大,传感器所敏感的光强增大,其输出电压增大,经过功率放大器处理后,使得电磁铁控制绕组的控制电流增大,电磁力增大,刚体被吸回平衡位置。
反之亦然。
1.3 磁悬浮系统的动力学模型
1.3.1 刚体运动方程
刚体受力情况如图2-2所示,图中mg 表示刚体所受得重力,(,)F i x 表示线圈通电时刚体所受的电磁力,()d f t 表示系统所受的干扰力,()t θ表示刚体与参考平面的距离,0()t θ表示电磁铁与参考平面的距离,()x t 表示电磁铁与刚体之间的距离,取向上为正。
参考平面
图2-2 刚体受力示意图
Figure2-2 Schematic diagram of strained rigid body
根据牛顿第二定律,可得刚体的运动方程:
22
d ()(,)()d d x t m F i x mg f t t =-- (2-1) 1.3.2 电磁力模型
电磁铁与刚体构成磁路,磁路的磁阻主要集中在两者间的气隙上,其中有效气隙磁阻可表示为
02()x
R x S
μ=
(2-2) 式中0μ为空气的导磁率,70410/H m μπ-=⨯;S 为电磁铁的极面积;x 为导轨与磁极表面的瞬时间隙。
由磁路的基尔霍夫定理可知
(,)()Ni i x R x =Φ (2-3)
式中N 为电磁铁线圈匝数,i 为电磁绕组中的瞬时电流,(,)i x Φ为铁心磁通。
将式(2-2)代入式(2-3),可得铁心磁通为
0(,)2SNi
i x x
μΦ= (2-4)
当电磁铁工作在非饱和状态时,电磁铁的磁链
20(,)(,)2SN i
i x N i x x
μλ=Φ=
(2-5)
另外,电磁力可由与它磁场同能量的关系表示为
(,)
(,)c W i x F i x x ∂=∂ (2-6)
式中(,)c W i x 为磁能能量,并且
(,)(,)d t
c W i x t x t λ=⎰ (2-7)
将式(2.5)代入式(2.7),再代入式(2.6),可得电磁力为
22
0220(
)4(,)()4
SN i SN i
x
F i x x
x
μμ∂=
=
∂ (2-8) 令2
04
SN k μ=
,则有
2(,)()i
F i x k x
== (2-9)
由式子(2-9)可知,电磁吸引力F 与气隙x 成非线性的反比关系,这正是磁悬浮系统不稳定的根源。
1.3.3 绕组回路的电学方程
根据电磁感应定律,可知电磁铁绕组回路的电压u 与电流i 的关系为
d d
[(,)]d d u Ri Ri L i x i t t λ=+=+⋅ (2-10)
式中(,)L i x 为绕组中的瞬时电感,可表示为
(,)
(,)N i x L i x i
Φ=
(2-11) 将式(2-4)代入式(2-11)可得
2
0(,)2SN L i x x
μ=
(2-12)
再将式(2-12)代入式(2-10),可得电学方程为
22002
22SN i SN i
u Ri i x x
x
μμ=+⋅-⋅ (2-13) 由上可知,磁悬浮系统垂直运动的动力学方程由下列数学方程描述:
22
d ()
(,)()d d x t m F i x mg f t t =-- 22002
22SN i SN i
u Ri i x x
x
μμ=+⋅-⋅ 220(,)
()
4
SN i
F i x x
μ= 及边界条件
2200
000
(,)()4
SN i mg F i x x μ==
(2-14)
1.4 线性化模型分析
将电磁力(,)F i x 在平衡点00(,)i x 附近进行泰勒展开,并忽略高阶项得:
0000000(,)(,)(,)()
(,)()
i x F i x F i x F i x i i F i x x x =+-+- =0000(,)()()i x F i x k i i k x x +-+-
=00(,)()()i x F i x k i t k x t +∆+∆ (2-15) 式(2-15)中00(,)F i x 表示在平衡点处(气隙为0x 、电流为0i )刚体的电磁力;系数i k 表示电流变化单位量时电磁力变化的值,x k 表示气隙变化单位长度时电磁力变化的值,由式(2-8)可得
200
2
2i SN i k x μ=
(2-16)
22
003
2x SN i k x μ=-
(2-17)
在电磁铁绕组中,电压u 的变化u ∆为
0()()()u t u t u t ∆=-
=220000002
d()()d()
()2()
d 2()
d N S i i N Si t x x R i i Ri x t t
x t t
μμ+∆+∆+∆+
-
-
=2200020
d ()d ()2d 2d N S N Si i t x
R i t x t
x
t
μμ∆∆∆+
-
=0x R i L i
L x ∆+∆-∆ (2-18) 式(2-18)中0L 表示平衡点的电感,
2
000
2SN L x μ=
(2-19)
2
002
2x SN L i x
μ=
(2-20)
由式(2-1)、(2-14)、(2-15)和式(2-18)可得
0()()i x d x mx
k i k x f t u t R i L i L x
=∆+∆-⎧⎨∆=∆+∆-∆⎩ (2-21) 取状态变量为[,,]x x
i ∆∆∆ ,则由式(2-21)可得磁悬浮系统的线性化状态方程 00
001000100()()100x i d x
x
x k k x x u t f t m m m i i L R L L L ⎡
⎤
⎡⎤
⎢⎥⎡⎤⎢⎥∆∆⎢⎥⎡⎤⎡⎤⎢⎥⎢⎥
⎢⎥⎢⎥⎢⎥⎢⎥∆=∆+∆+-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢
⎥⎢⎥⎢⎥∆∆⎣⎦⎢⎥⎣⎦⎢⎥⎢⎥⎣⎦-⎢⎥⎣⎦⎢⎥⎣
⎦
(2-22) []100x y x i ∆⎡⎤
⎢⎥=∆⎢⎥⎢⎥∆⎣⎦
(2-23) 对应的系统框图如图2-3所示。
图2-3 线性系统的结构框图
Figure2-3 Structure diagram of linear system
对方程组(2-21)做拉氏变换,可得悬浮气隙位置x ∆和输入电压u ∆之间的传递函数
()
()x s u s ∆=∆03200
i x
k mL Rk R S S L mL +- (2-24)
系统的特征方程为:
3200
0x
Rk R S S L mL +
-= (2-25)
由劳斯判据知,系统的特征系数存在零和负值,所以这个系统是一个三阶不稳定系统,因此需要设计一个反馈控制器,保证磁悬浮系统稳定。