开关电源峰值电流模式次谐波振荡研究
开关电源峰值电流模式次谐波振荡研究
开关电源峰值电流模式次谐波振荡研究
林薇;刘永根;张艳红
【期刊名称】《太赫兹科学与电子信息学报》
【年(卷),期】2009(007)004
【摘要】对峰值电流模式开关电源的次谐波振荡进行了系统研究,包括其产生原因、导致后果、解决方法及具体电路实现.定性分析了次谐波振荡产生的原因,从2个角度分别定量地对其进行深入研究,分析了上斜坡补偿和下斜坡补偿2种避免次谐波
振荡的方法,并基于3种最基本的开关电源拓扑(Buck,Flyback和Boost)给出了具
体的斜坡补偿电路,采用Hspice仿真得到不同斜率的斜坡补偿信号和自调节斜坡补偿信号.
【总页数】5页(P330-334)
【作者】林薇;刘永根;张艳红
【作者单位】华侨大学,信息科学与工程学院,福建,泉州,362021;电子科技大学,电子薄膜与集成器件国家重点实验室,四川,成都,610054;华侨大学,信息科学与工程学院,福建,泉州,362021
【正文语种】中文
【中图分类】TN751.2
【相关文献】
1.衬比度1012亚皮秒钕激光在金属靶上产生的二次和三次谐波振荡 [J],
Ло.,Л;Со.,В
2.峰值电流控制开关电源的反馈补偿问题研究 [J], 李新;景欣
3.PFC Boost变换器次谐波振荡抑制方法研究 [J], 郭颖娜;程为彬;陈文奎;宋久旭;杨志龙
4.周期振荡的二次谐波空间功率合成振荡器 [J], 肖国华
5.峰值电流控制开关电源斜坡补偿的研究 [J], 高原;邱新芸;汪晋宽
因版权原因,仅展示原文概要,查看原文内容请购买。
开关电源谐波分析及抑制方法!

第 !/ 卷
图 !"
单相整流负载电流
# ! ! 单相逆变电路的谐波分析 图 $ 为典型的单相逆变电路, 假设直流电压为 ", 开关管在理想的情况下工作, 即零电压开通和零电流 关断, 开和关的时间为零, 开关管的占空比为 %&# 。
图 $"
单相逆变电路
在图 $ 中可得如下表达式 $ ( %) & " (& # % # $ ( %) & & ( ’ ) ! (!)
[ ( ]范嗣强, 戴特力, 梁一平/ 千瓦级连续激光二极管面阵电 源的设 计 与 实 现 [ 0] / 重庆师范大学学报 (自然科学 版) , -))1 , -(&) : ,&%,*/ [ - ]234567890/ 电力系统谐波%基本原理、 分析方法和滤 波器设计 [ :] / 徐政译/ 北京: 机械工业出版社, -))&/ [ & ]钱照明/ 电磁兼容设计基础及干扰抑制技术 [ :] / 浙江: 浙江大学出版社, -)))/ [ . ]周佩白, 鲁君伟/ 电磁兼容问题的计算机模拟与仿真技 图 *" 没有接入滤波器的电压波形图 术 [ :] / 北京: 中国电力出版社, -))!/ [ 1 ]凡木文/ 新型无污染大功率开关电源 [ ;] / 成都: 四川大 学, -))&/ [ ! ]李旷, 肖国春, 王兆安/ 耦合变压器型串联直流有源电力 滤波器的研究 [ 0] / 西 安 交 通 大 学 学 报, -)). , &, (!) : !&-%!&1/ [ * ]范瑞祥, 罗安, 李欣然/ 并联混合型有源电力滤波器的系 统参数设计及应用研究 [ 0] / 中国电机工程学报, -))! , -! (-) : ()!%(((/ [ , ]罗安/ 电网谐波治理和无功补偿技术及装备 [ :] / 北京: 图 ," 接入滤波器电压波形图 中国电力出版社, -))!/
峰值电流模式控制总结(完整版).

峰值电流模式控制总结PWM (Peak Current-mode Control PWM)峰值电流模式控制简称电流模式控制。
它的概念在60年代后期来源于具有原边电流保护功能的单端自激式反激开关电源。
在70年代后期才从学术上作深入地建模研究 。
直至80年代初期,第一批电流模式控制PWM集成电路(UC3842、UC3846)的出现使得电流模式控制迅速推广应用,主要用于单端及推挽电路。
近年来,由于大占空比时所必需的同步不失真斜坡补偿技术实现上的难度及抗噪声性能差,电流模式控制面临着改善性能后的电压模式控制的挑战。
如图1所示,误差电压信号 Ue 送至PWM比较器后,并不是象电压模式那样与振荡电路产生的固定三角波状电压斜坡比较,而是与一个变化的其峰比较,然后得到PWM 值代表输出电感电流峰值的三角状波形或梯形尖角状合成波形信号UΣ脉冲关断时刻。
因此(峰值)电流模式控制不是用电压误差信号直接控制PWM脉冲宽度,而是直接控制峰值输出侧的电感电流大小,然后间接地控制PWM脉冲宽度。
图1采用斜坡补偿的BUCK电流型控制1. 峰值电流模式控制PWM的优点:①暂态闭环响应较快,对输入电压的变化和输出负载的变化的瞬态响应均快;峰值电流模式控制PWM是双闭环控制系统,电压外环控制电流内环。
电流内环是瞬时快速按照逐个脉冲工作的。
功率级是由电流内环控制的电流源,而电压外环控制此功率级电流源。
在该双环控制中,电流内环只负责输出电感的动态变化,因而电压外环仅需控制输出电容,不必控制LC储能电路。
由于这些,峰值电流模式控制PWM具有比起电压模式控制大得多的带宽。
②虽然电源的L-C滤波电路为二阶电路,但增加了电流内环控制后,只有当误差电压发生变化时,才会导致电感电流发生变化。
即误差电压决定电感电流上升的程度,进而决定功率开关的占空比。
因此,可看作是一个电流源,电感电流与负载电流之间有了一定的约束关系,使电感电流不再是独立变量,整个反馈电路变成了一阶电路,由于反馈信号电路与电压型相比,减少了一阶,因此误差放大器的控制环补偿网络得以简化,稳定度得以提高并且改善了频响,具有更大的增益带宽乘积。
峰值电流控制模式次谐波振荡的原因
峰值电流控制模式次谐波振荡的原因峰值电流控制模式下出现次谐波振荡,这事儿就像平静的湖面突然泛起奇怪的涟漪,让人摸不着头脑。
那到底为啥会出现这种情况呢?咱们得先了解一下峰值电流控制模式是啥。
这就好比是一个管家,负责管理电流这个调皮的小家伙。
在正常情况下,管家能把电流管得服服帖帖的,让整个电路系统有条不紊地运行。
可是啊,这个管家也有头疼的时候。
其中一个原因呢,就是电路里的电感和电容这两个家伙在捣乱。
电感就像是一个慢性子的人,电容呢,又像是一个急性子。
当电流在电路里跑来跑去的时候,电感这个慢性子就会阻碍电流的变化,而电容这个急性子又想让电压一下子就达到某个值。
这一慢一快啊,就容易产生矛盾。
就好比一个慢腾腾的乌龟和一个风风火火的兔子在一起赶路,能不出乱子吗?在峰值电流控制模式下,这种电感和电容的不协调就可能引发次谐波振荡。
再说说占空比这个概念。
占空比就像是在一个时间段里,电流能自由活动的时间比例。
如果这个比例没控制好,就像一个人每天的休息和工作时间乱了套。
有时候啊,占空比太大或者太小,就会让电路里的各种元件不适应。
这就好比你每天只睡两个小时或者睡二十个小时,身体肯定会出问题,电路也是一样的道理。
在峰值电流控制模式里,占空比不合适的时候,次谐波振荡就可能冒出来。
还有一个不可忽视的因素是反馈环路。
反馈环路就像是电路的耳朵,它得听着电路里各个地方的情况,然后把信息反馈给控制部分。
可是呢,如果这个耳朵不太灵敏,或者传递信息的时候出了差错,那就坏事儿了。
比如说,就像在一个传话游戏里,第一个人说的话到最后一个人那里完全变了样。
反馈环路要是出了问题,电路就可能误解当前的情况,从而导致次谐波振荡。
这就像一个人本来要往东边走,结果因为错误的信息,朝着西边去了,电路也是这样迷失了方向。
另外啊,电路里的噪声也不是个善茬儿。
噪声就像是一群调皮捣蛋的小妖精,在电路里到处乱窜。
它们可能会干扰正常的电流信号,让原本好好的电流变得乱七八糟。
开关电源谐波的研究
图 4
各分 量 叠 加 成 矩 形 波
Fi . Re tn ua v u e p s db t a ho c mp n n g4 ca g lr wa es p r o e yi e c f o o e t s s
从 图 4可 看 出方 波 电压 ) 高 次 谐 波 叠加 是
1 . 单 相 逆 变 的 谐 波 分 析 2
典 型的单 相逆变电路 如图 3 示 , 设直流 电压 所 假 为 E, 开关 管为理 想情 况下工 作 , 即零 电压开通 零 电 流关 断 、 开和关 的时 间为零 , 开关管 的占空 比为 5 %。 0
在 图 3中可 得 如 下 表 达 式 :
而成 的 , 波 电压 经过 非 线性 电感 、 谐 电容 负载 后 , 负
载电 流一定 是谐 波 电流 的叠加 。 从 上述 单 相整 流 和单 相逆 变 电路 分析 可 知 , 在
电流 回路 中一 定存 在 谐波 电流 , 同理 可推 出三 相整 流 和逆 变 也一 定也 存 在谐 波 电流 , 因此 只要 有 开关
频 率 与周期 信 号一 致 的分 量称 为 一次谐 波 , 又 称基 波 ; 频率 为周期 信号三倍 的称 为三次 谐波 ; 三次
及 以上 的谐 波称 为高次 谐 波 。 4是 由式() 图 6的分量
瞢 _ 而 成 ) 】 Ⅱ
.
厂—
r : / ~
图 2 单 相 整 流 负 载 电 流 纹 波
÷ u ,0 ( , t ) 手
图 1 单 相 大 功 率 整 流 电路
Fi . A i l - has ar e powe e tfe c r ui g1 sng e p el g r r c i d i c t i
开关电源中的谐波分析及其控制方法

开关电源中的谐波分析及其控制方法开关电源的广泛使用给电网造成了不利影响,降低了电能质量,进行开关电源谐波抑制十分重要。
本文首先对开关电源产生谐波的机理进行了分析,重点探讨了谐波抑制的方法。
实践表明,这些方法都是行之有效的。
标签:开关电源谐波抑制0 引言电力电子的不断发展使得开关电源的应用越来越广泛,开关电源技术在不断成熟,正朝着可靠性高以及小型化的方向发展。
但值得注意的是,开关电源中安装有大功率的开关管,它们作用在高频状态时会产生谐波,对周围的设备造成电磁干扰,影响电网的电能质量。
因此,对开关电源产生的谐波进行抑制十分必要,当前出现的抑制方法大致可以分为有源滤波以及无源滤波两种。
其中,后者的滤波效果更好,但其技术较为复杂,在实际应用中还不够广泛;无源滤波方法不仅能够进行谐波抑制,还可以起到无功补偿的效果[1]。
1 开关电源产生谐波机理分析所谓开关电源,它是通过事先设置好频率及占空比的脉冲信号对开关管的接通和断开进行控制[2];从而实现功率的输出以及电压的调整。
为此,在开关电源的内部需要有相应的脉冲发生电路,实现对开关管的控制。
控制开关管是通过脉冲信号来受到控制的,改变脉冲占空比可以调整开关管的导通时间。
在开关电路中,开关管只有两种工作状态,一种是on,一种是off;此时,在输出电压中会存在与工作频率相对应的交流信号;这一谐波信号将会持续存在于输出电压中,比如:将开关的控制信号脉冲频率设置为:100kHz,其输出频谱为基波的奇次分量;在分析输出电压的频谱时可以看出,100kHz、300 kHz、500 kHz的频谱能量均存在。
另外,在上升沿和下降沿处,脉冲信号的电压变化速率很快,电流变化速率也很快;在此过程中会产生与控制脉冲频率不同的高频分量。
可见,为了对开关电源的频率成分进行控制,进行开关电源设计时应该根据设计需要合理选择开关控制脉冲,另外,还应该降低控制脉冲的速率。
2 开关电源谐波抑制方法2.1 使用EMI滤波器EMI滤波技术能够对尖脉冲干扰实施有效抑制,可以可靠滤除传导干扰以及辐射干扰,图1给出了一种EMI滤波器,它是由电容和电感组成的;将其接在开关电源的输出端;高频旁路电容为C1、C5,其作用是将输入电源线之间的差模干扰滤除掉;L1、C2,C4与L2、C2、C4对电路中的共模干扰进行滤除;L3、L4线圈的初级匝数是相等的,但其极性相反;当通以交流电流后,将会在磁芯中产生相反的磁通,这就是它抑制共模干扰的原理。
次谐波振荡-斜率补偿基本概念

次谐波振荡及斜率补偿概念
采用电流控制模式(current mode),电感电流工作于连续模式且占空比大于50%时,会出现次谐波振荡。
这种由于固定频率且采用峰值电流检测模式所产生的不稳定现象的干扰是不包含于闭环控制回路之内的。
如图A所示,在t0时刻,开关开始导通,电感电流以m1斜率上升;在t1时刻,电流侦测引脚的电压达到反馈回路通过误差放大器所建立的阀值电压(control voltage),开关关闭,电感电流以m2的斜率下降,直至下一个周期开始。
如果在t1时刻或t0~t1之前引入干扰,t1-1后干扰移除(正常运行情况如实线所示,引入干扰后如虚线所示),则control voltage 1先会变成control voltage 2,然后再回到control voltage1,即在control voltage1~ control voltage2之间产生△I;由于t0~t2时间固定,即周期固定,△I的引入会使得ton时间变长,因此toff时间会缩短,电感电流在t2时刻下降深度不够。
进入下一个周期时,由于t2时刻电感电流水平比较高,因此会在较短的时间内上升至control voltage1,即ton时间缩短,相应的会导致toff时间变长…… 由A图中算式可知,当m2/m1小于1时,经过N个周期后系统误差趋近于零;当m2/m1大于1时,误差会越来越大(某个数乘以大于1的数,乘积会越来越大),直至系统不稳定。
为了解决次谐波振荡问题,因此引入了谐波补偿。
如图B所示,补偿斜率m3必须等于或稍大于m2/2才能使系统稳定。
---By yanhong。
开关电源中的电流型控制模式
开关电源中的电流型控制模式摘要:讨论了开关电源中电流反馈控制模式的工作原理、优缺点,以及与之有关的斜波补偿技术。
关键词:开关电源;电流型控制;斜波补偿1引言PWM型开关稳压电源是一个闭环控制系统,其基本工作原理就是在输入电压、内部元器件参数、外接负载等因素发生变化时,通过检测被控制信号与基准信号的差值,利用差值调节主电路功率开关器件的导通脉冲宽度,从而改变输出电压的平均值,使得开关电源的输出电压保持稳定。
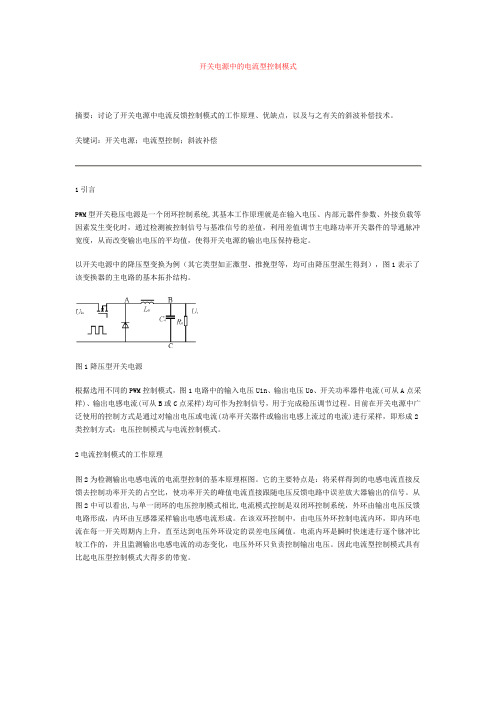
以开关电源中的降压型变换为例(其它类型如正激型、推挽型等,均可由降压型派生得到),图1表示了该变换器的主电路的基本拓扑结构。
图1降压型开关电源根据选用不同的PWM控制模式,图1电路中的输入电压Uin、输出电压Uo、开关功率器件电流(可从A点采样)、输出电感电流(可从B或C点采样)均可作为控制信号,用于完成稳压调节过程。
目前在开关电源中广泛使用的控制方式是通过对输出电压或电流(功率开关器件或输出电感上流过的电流)进行采样,即形成2类控制方式:电压控制模式与电流控制模式。
2电流控制模式的工作原理图2为检测输出电感电流的电流型控制的基本原理框图。
它的主要特点是:将采样得到的电感电流直接反馈去控制功率开关的占空比,使功率开关的峰值电流直接跟随电压反馈电路中误差放大器输出的信号。
从图2中可以看出,与单一闭环的电压控制模式相比,电流模式控制是双闭环控制系统,外环由输出电压反馈电路形成,内环由互感器采样输出电感电流形成。
在该双环控制中,由电压外环控制电流内环,即内环电流在每一开关周期内上升,直至达到电压外环设定的误差电压阈值。
电流内环是瞬时快速进行逐个脉冲比较工作的,并且监测输出电感电流的动态变化,电压外环只负责控制输出电压。
因此电流型控制模式具有比起电压型控制模式大得多的带宽。
图2检测输出电感电流的电流型控制原理框图实际电路以单端正激型电源为例,如图3所示。
误差电压信号Ue送至PWM比较器后,并不是像电压模式那样与振荡电路产生的固定三角波状电压斜波比较调宽,而是与一个变化的、峰值代表功率开关上的电流信号(由Rs上采样得到)的三角状波形信号(电感电流不连续)或矩形波上端叠加三角波合成波形信号(电感电流连续)比较,然后得到PWM脉冲关断时刻。
现代化开关电源谐波分析及抑制方法

现代化开关电源谐波分析及抑制方法摘要随着电力电子技术在开关电源快速的发展,开关电源的应用在提高系统可靠性和效率方面显得尤为重要。
而开关电源的核心技术是电力电子技术,开关器件在导通和关断时会产生谐波成分和电磁干扰,影响系统的正常工作,降低电网电源功率因素,因此电力电子技术的快速发展,谐波的抑制已成为国内外同行专家关注的重点。
基于此,本文就针对开关电源谐波分析及抑制方法进行分析研究。
关键词开关电源;谐波分析;抑制方法前言开关电源具有效率高、体积小、重量轻、输出电压可调范围大、实现多路输出方便等优点,使用范围日益扩大,尤其在仪器仪表、通信及自动化设备中得到了广泛的应用。
但开关电源的广泛应用会造成严重的谐波干扰,因为谐波会沿线路产生传导干扰和辐射干扰,从而对电网产生污染,并影响用电设备的稳定和安全运行。
因此,无论从保护电网的安全运行,还是从使用电设备正常工作来看,对开关电源的谐波干扰采取一定措施加以抑制具有重要意义。
1 开关电源谐波产生的原因典型的开关电源类设备包括电子镇流日光灯、节能灯、计算机及显示器等,其在输入的交流电压经过输入电路整流、滤波后变成直流电压。
通过变换电路中的开关元件周期性导通、关断,逆变成交流电,再经输出电路将高频次级方波电压整流和滤波成直流后输出。
控制电路一般的控制方式是脉宽调制(PWM)方式,其作用是向驱动电路提供矩形脉冲,通过控制开关元件的占空比来达到改变输出电压的目的。
从原理分析,开关电源产生谐波的原因较多,其中由基本整流器产生的电流高次谐波干扰和变压器型功率转换电路产生的尖峰电压干扰是主要原因。
基本整流器的整流过程是产生EMI最常见的原因。
这是因为正弦波电源通过整流器后变成单向脉动电源已不再是单一频率的电流。
变压器型功率转换电路用以实现变压、变频以及完成输出电压调整,是开关稳压电源的核心,主要由开关管和高频变压器组成。
它产生的尖峰电压是一种有较大幅度的窄脉冲,其频带较宽且谐波比较丰富[1]。
开关电源系统中的谐波分析与抑制方法研究

实验研究开关电源具有体积小、效率高、重量轻,以及输出电压可调范大等多项优点,因此得到了广泛应用。
开关电源的应用会引起较为严重的谐波干扰,谐波会沿线路形成辐射和传导干扰,这会污染电网,影响电子设备的应用,并且会对电网运行的安全性和稳定性造成不良影响。
可见,采取合理的措施对开关电源谐波干扰进行处理意义重大。
1 谐波对电力系统的危害谐波对电力系统的危害主要体现在以下几个方面:(1)导致无功补偿电容器组引起谐振或谐波电流放大,这会造成电容器由于负荷或过电压受到严重破坏。
同时,也会导致电力电缆出现过负荷,或电压击穿情况。
(2)加大电网在运行过车中的损耗情况,如果发生谐振,或放大时损耗,造成的十分严重。
(3)干扰自动控制装置、继电保护、信息机。
(4)谐波的出现会增加电度表在应用过程中误差[1]。
2 开关电源谐波出现的原因典型的开关电源类设备包括节能灯、计算机、电子镇流日光灯等,输入交流电压后,通过相应的整流,以及滤波后会转变为直流电压。
对电路中的开元件周期性导通、关断,逆变成交流电,然后通过输出电路,实现对高频次方波电压整流和滤波,最后转变为直流后,完成输出[2]。
通常来说,控制电路采用采用脉宽调制方式完成相应的控制操作,其在具体运行过程中的作用是向驱动电路提供矩形脉冲,实际操作期间,通过控制开关元件占空比的方式,完成对输出电压的合理改变。
从原理上入手,开展相应的分析工作,可以发现导致开关电源在应用过程中出现谐波的因素有很多,基木整流器在应用过程中形成电流高次谐波干扰,以及变压器功率转换形成的尖峰电压干扰是导致开关电源在应用期间出现谐波的主要原因。
基木整流器在具体整流过程中容易形成电磁干扰,这主要因为,经过整流器的正弦波,会变为单向脉动电源,其不再是单一频率电流[3]。
变压器性功率转换器在具体应用过程中的主要作用就是对完成对变频、变压、输出电压等各项内容内容的合理调整,其是开关稳定电源的核心内容,其由高频变压器和开关管共同构成。
峰值电流控制Boost变换器的研究

电子基础峰值电流控制B o o s t 变换器的研究作者/兰森林、朱修敏、马黎、魏力,西华大学电气与电子信息学院基金项目:本课题由西华大学研究生创新基金资助,基金号:ycjj 2016054。
文章摘要:分析了峰值电流模式控制的Boost 变换器工作原理,并讨论了连续导电模式(CCM )变换器的稳定性问题。
研究了斜坡补偿法 对占空比D >0.5并工作于CCM 时变换器存在的次谐波振荡的影响。
并给出了以UC 3842控制的Boost 变换器设计实例,仿真和实验研究结果 验证了理论分析的正确性。
关键词:Boost 变换器;峰值电流;控制;次谐波振荡引言开关变换器主要有电压型控制和电流型控制两种控制方 式。
电压型控制是功率变换器中最常用的控制方式,控制方 法简单,抗噪声性能强,但对输入扰动不能立即反应,动态 响应速度不够理想电流型控制又分为平均电流控制、 峰值电流控制和谷值电流控制P -7!,而峰值电流型控制应用 最为广泛®。
峰值电流型控制提高了变换器对输入电压变化 的响应速度和输出电压的调节精度,同时易于实现对变换器 的过流保护峰值电流控制通常采用电感电流(或开关管电流)检测 值的峰值同控制信号进行比较,决定开关占空比,提高了开 关变换器的性能。
当开关变换器开关管占空比D >0.5时, 且工作在CCM 模式时存在次谐波振荡w ,通过在控制电压 或控制电流中叠加相应的斜坡补偿信号可以对次谐波振荡进 行消除[11]。
斜坡补偿保证了开关变换器的稳定工作。
本文分析了 Boost 变换器峰值电流控制的基本原理及CCM 下D >0.5产生的次谐波振荡。
设计了 UC 3842作为控制芯片的实验样机,实验结果验证了理论分析的正确性。
1. ttfl电流控制方式■ 1.1峰值电流控制的基本原理峰值电流控制Boost 变换器的原理图和主要控制波形 如图1所示,其工作原理为:当一个开关周期开始时,时钟 信号使触发器置位,Ug 为高电平,^导通,电感电流匕线 性增大,检测电阻Rs 上的电压1^也线性增大,当U s 与控 制电压\相等时,比较器翻转,触发器复位触发器输出的 驱动信号\变为低电平,开关管\关断,下一个时钟脉冲 到来后则开始新的开关周期。
开关模式电源中的谐波分析与抑制方法

开关模式电源中的谐波分析与抑制方法概述开关电源作为现代电子设备中常用的电源供给方式,具有高效率、小体积和轻重量等优点。
然而,开关电源也会产生一定的谐波电流,对电网和其他设备造成干扰。
因此,谐波分析和抑制成为开关模式电源设计中的重要环节。
1. 谐波分析为了准确分析开关模式电源中的谐波问题,首先需要对谐波进行数学分析和频谱分析。
开关模式电源中产生的谐波主要包括电流谐波和电压谐波两部分。
1.1 电流谐波分析开关电源中的电流谐波主要来自电源输入端电网的非线性负载。
通过使用傅里叶变换等数学方法,可以将电流信号分解为不同频率的谐波成分,进而分析谐波的电流畸变率和对电网的影响。
1.2 电压谐波分析开关电源产生的电压谐波可以通过分析开关功率器件(如MOS管)的开关特性、电源滤波电容的功率容量、电源线路的阻抗等因素得到。
通过频谱分析可以确定电源输出电压中各频率谐波的幅值和相位情况。
2. 谐波抑制方法为了解决开关电源中的谐波问题,可以采取以下措施进行抑制。
2.1 输入滤波器合理设计和选择输入滤波器可以有效地减小开关电源输出端对电网端产生的谐波影响。
输入滤波器主要负责过滤电源输入端电网传来的谐波电流,并通过合适的参数设计使其在谐波频率带处具有较低的阻抗。
2.2 输出滤波器开关电源输出滤波器主要用于减小输出电压中的谐波成分。
常见的输出滤波器包括L型滤波器和π型滤波器等。
通过合适的设计和选择滤波器元件,可以降低输出电压中的谐波幅值,使其满足相关的标准要求。
2.3 谐波抑制技术除了滤波器之外,还可以使用谐波抑制技术来减小开关电源中谐波的影响。
例如,采用多级谐波抑制技术可以有效地降低电流谐波含量;采用谐波主动抑制技术可以实时检测和抑制开关电源中的谐波成分。
2.4 对地干扰的抑制开关电源中的谐波电流往往会通过地线传导到其他设备,引发地干扰问题。
为了解决这个问题,可以通过优化接地方式、增加电磁屏蔽和使用高频绕组等方法来有效抑制对地干扰。
电流源负载峰值电流控制buck变换器的复杂次谐波振荡现象

电流源负载峰值电流控制 buck 变换器具有次谐波振荡快慢复杂现象 . 本文建立了它的分段光滑开关模型及 通过数值仿真研究了电路参数对 buck 变换器的非线性动力学行为的 离散迭代映射模型. 根据离散迭代映射模型, 影响, 发现了具有快慢效应次谐波振荡吸引域的分岔图和呈现双环带状的庞加莱映射 . 根据分段光滑开关模型, 采 库塔算法, 仿真研究了 buck 变换器的时域波形和相轨图, 研究结果表明:电感电流存在由次谐波振荡与降 用龙格频次谐波振荡组成的 n 型次谐波振荡现象;输出电压存在快标与慢标结合的正弦次谐波振荡现象 . 实验结果验证 了文中的分析结果及仿真结果 .
内的分岔图呈现出具有快慢效应的次谐波振荡吸 引域, 我们将位于上部、 下部的分岔图分别称为上 下吸引域. 为了更详细地揭示 buck 变换器 吸引域、 在上、 下吸引域范围内的分岔行为, 在 nT 时刻构筑 可得到状态变量 i L 和 v C 的庞加莱映 庞加莱截面, 射. 图 3 ( a ) 和 ( b ) 分别给出了 I o = 0. 95 A 和 I o = 1. 021 A 的庞加莱映射.
降频现象
[ 5]
DC 变换器的性能. 因此, 深 现象严重影响开关 DCDC 变换器的分岔和混沌等 入分析和研究开关 DCDC 变换器的设计和 非线性动力学现象, 对开关 DC工程应用具有重要的理论意义和实用价值 . DC 变换器在学术界 峰值电流型控制开关 DC和工业界得到了广泛的研究和应用. 常规开关 DCDC 变换器是含有电感 L 和电容 C 的二阶电路, 通 过建立二维离散迭代映射模型, 已有不少文献研究 DC 变换器的电路参数对分 了电阻性负载开关 DC. 当开关周期 T 远小于 岔和混沌现象的影响 DC 变换器电路的 RC 时间常数, 开关 DC即 T RC 时, 可以认为输出电压恒定不变, 输出部分可以等 DC 变换器降阶为 效为一个电压源, 从而使开关 DC[ 8, 9, 14 ]
开关电源峰值电流模式次谐波振荡研究
开关电源峰值电流模式次谐波振荡研究开关电源是一种常见的电源供电方式,它具有高效、稳定和可控的特点。
然而,在实际应用中,开关电源的运行过程中往往会出现次谐波振荡的问题。
次谐波振荡是指开关电源输出电流中存在频率接近整数倍基波频率的次谐波成分,会引起系统工作不稳定甚至引起系统损坏。
因此,对开关电源峰值电流模式次谐波振荡进行研究具有重要的理论和应用价值。
开关电源的峰值电流模式是一种广泛应用于电力电子领域的控制策略,它能够实现对输出电压的快速响应和精确控制,在调制器中通过峰值电流模式控制算法动态调整开关器件开关时间和开关频率,以实现输出电流的控制。
然而,在峰值电流模式下,受到电源输入电压变化、负载变化和电容电感参数变化等因素的影响,开关电源输出电流中会产生次谐波振荡。
次谐波振荡的产生机理复杂,主要与开关电源中的非线性元件和电路拓扑结构有关。
首先是因为开关电源使用开关器件进行开关动作,其导通和关断过程存在大量的开关损耗和串扰。
这些损耗会引起电流的非线性,从而产生次谐波振荡。
其次,电路中存在电容和电感元件,它们对电流的响应速度较慢,导致电流的峰值出现滞后。
为了解决开关电源峰值电流模式次谐波振荡问题,需要深入研究电路中的非线性特性和频率响应特性,以及开关器件的性能参数。
研究发现,通过优化电路拓扑结构和控制方法,可以有效降低次谐波振荡的程度。
例如,采用谐振开关电路、采用多电平控制技术或者增大电容和电感元件的数值等方法都可以减小次谐波振荡的幅度。
此外,还可以通过数字仿真和实验验证的方法,对开关电源进行参数优化和性能测试。
通过建立电路模型和仿真软件,可以模拟开关电源的工作过程,并优化电路参数和控制策略,以降低次谐波振荡的程度。
通过实验测试,可以验证仿真模型的可行性,并进一步优化和改进电路设计。
总之,开关电源峰值电流模式次谐波振荡是一个复杂而重要的问题,对于电源供电系统的稳定性和可靠性具有重要影响。
通过深入研究电路的非线性特性和频率响应特性,优化电路参数和控制策略,可以有效降低次谐波振荡的幅度,提高开关电源的工作效率和可靠性。
开关电源峰值电流模式次谐波振荡研究

开关电源峰值电流模式次谐波振荡研究DC-DC 开关电源因体积小,重量轻,效率高,性能稳定等优点在电子、电器设备,家电领域得到了广泛应用,进入了快速发展期。
DC-DC 开关电源采用功率半导体作为开关,通过控制开关的占空比调整输出电压。
其控制电路拓扑分为电流模式和电压模式,电流模式控制因动态反应快、补偿电路简化、增益带宽大、输出电感小和易于均流等优点而被广泛应用。
电流模式控制又分为峰值电流控制和平均电流控制,峰值电流的优点为:1)暂态闭环响应比较快,对输入电压的变化和输出负载的变化瞬态响应也比较快;2)控制环易于设计;3)具有简单自动的磁平衡功能;4)具有瞬时峰值电流限流功能等。
但是峰值电感电流可能会引起系统出现次谐波振荡,许多文献虽对此进行一定的介绍,但都没有对次谐波振荡进行系统研究,特别是其产生原因和具体的电路实现,本文将对次谐波振荡进行系统研究。
1 次谐波振荡产生原因以PWM 调制峰值电流模式开关电源为例(如图1 所示,并给出了下斜坡补偿结构),对次谐波振荡产生的原因从不同的角度进行详细分析。
对于电流内环控制模式,图2 给出了当系统占空比大于50%且电感电流发生微小阶跃△厶时的电感电流变化情况,其中实线为系统正常工作时的电感电流波形,虚线为电感电流实际工作波形。
可以看出:1)后一个时钟周期的电感电流误差比前一个周期的电感电流误差大,即电感电流误差信号振荡发散,系统不稳定;2)振荡周期为开关周期的2 倍,即振荡频率为开关频率的1/2,这就是次谐波振荡名称的由来。
图3 给出了当系统占空比大于50%且占空比发生微小阶跃AD 时电感电流的变化情况,可以看出系统同样会出现次谐波振荡。
开关电源次谐波振荡产生机理
开关电源次谐波振荡产生机理英文回答:Switching power supplies are widely used in various electronic devices due to their high efficiency and compact size. However, they can generate unwanted harmonics, including the second harmonic. The mechanism behind the generation of second harmonic oscillations in switching power supplies can be attributed to several factors.One of the main factors is the non-linear behavior of the power semiconductor devices, such as transistors or diodes, used in the power supply circuit. These devices switch on and off rapidly to regulate the output voltage. However, their switching behavior can introduce non-linearities in the current waveform, leading to the generation of harmonics. The second harmonic isparticularly significant because it is twice the frequency of the fundamental waveform.Another factor contributing to second harmonic oscillations is the parasitic capacitance and inductance present in the power supply circuit. These parasitic elements can resonate at the second harmonic frequency and cause the amplification of the second harmonic component in the output waveform. This resonance phenomenon occurs due to the interaction between the parasitic elements and the switching frequency of the power supply.Furthermore, the layout and design of the power supply circuit can also influence the generation of second harmonic oscillations. Improper placement of components or inadequate grounding can result in signal reflections and electromagnetic interference, which can further amplify the second harmonic content in the output waveform.To illustrate this mechanism, let's consider a simple example of a switching power supply driving a resistive load. When the power semiconductor device switches on, it allows current to flow through the load. However, due to the non-linear switching behavior, the current waveform may not be a perfect square wave. It may contain high-frequencycomponents, including the second harmonic. These high-frequency components can then be amplified by the parasitic capacitance and inductance in the circuit, resulting in the generation of second harmonic oscillations in the output waveform.In conclusion, the generation of second harmonic oscillations in switching power supplies can be attributedto the non-linear behavior of power semiconductor devices, the presence of parasitic capacitance and inductance, and the circuit layout and design. These factors can interact and amplify the second harmonic content in the output waveform, leading to unwanted harmonics.中文回答:开关电源由于其高效率和紧凑尺寸而被广泛应用于各种电子设备中。
PFC Boost变换器次谐波振荡抑制方法研究
PFC Boost变换器次谐波振荡抑制方法研究郭颖娜;程为彬;陈文奎;宋久旭;杨志龙【摘要】峰值电流型功率因数校正升压(PFC Boost)变换器运行时会产生次谐波振荡与混沌现象,影响电路的稳定运行,通常采用固定斜坡补偿或分段固定斜坡方法进行抑制,但是固定斜坡补偿方法来自于DC⁃DC Boost变换器,用于PFC Boost变换器具有不可克服的缺陷。
该文提出了一种能够彻底消除电路中次谐波振荡的动态斜坡补偿方法,并以110 V/200 W的PFC Boost变换器为研究对象,利用Matlab/Simulink进行了仿真和验证分析。
结果表明,所提出的动态斜坡补偿方法可实现次谐波振荡抑制和单位功率因数校正的双重功能。
%The power factor correction boost(PFC Boost)converter of peak current mode can generate the subharmonic os⁃cillation and chaos phenomenon in its running,which affects the stable operation of the circuit. The constant slope compensation or segmentation constant slope method is usually used to suppress the subharmonic,but the constant slope compensation method for DC⁃DC Boost converter has the inevitable defects to PFC Boost converter. In this paper,a dynamic slope compensation method is proposed to entirely eliminate the subharmonic oscillation in the circuit,and the PFC Boost converter of 110 V/200 W is tak⁃en as the research object. The simulation and validation analysis for the method was carried out with Matlab/Simulink. The re⁃sults show that the proposed dynamic slope compensation method can realize the dual functions of subharmonic oscillation sup⁃pression and unit power factor correction.【期刊名称】《现代电子技术》【年(卷),期】2016(039)016【总页数】5页(P143-146,150)【关键词】PFC Boost变换器;次谐波振荡;振荡抑制;动态斜坡补偿【作者】郭颖娜;程为彬;陈文奎;宋久旭;杨志龙【作者单位】陕西省油气井测控技术重点实验室,陕西西安 710065;陕西省油气井测控技术重点实验室,陕西西安 710065;中海油节能环保服务有限公司,天津300457;陕西省油气井测控技术重点实验室,陕西西安 710065;陕西省油气井测控技术重点实验室,陕西西安 710065【正文语种】中文【中图分类】TN710-34;TP273.1PFC Boost变换器是有源功率因数校正电路最为广泛的拓扑结构之一[1⁃3]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
开关电源峰值电流模式次谐波振荡研究时间:2009-12-11 08:52:25 来源:信息与电子工程作者:林薇,刘永根,张艳红华侨大学
DC-DC开关电源因体积小,重量轻,效率高,性能稳定等优点在电子、电器设备,家电领域得到了广泛应用,进入了快速发展期。
DC-DC开关电源采用功率半导体作为开关,通过控制开关的占空比调整输出电压。
其控制电路拓扑分为电流模式和电压模式,电流模式控制因动态反应快、补偿电路简化、增益带宽大、输出电感小和易于均流等优点而被广泛应用。
电流模式控制又分为峰值电流控制和平均电流控制,峰值电流的优点为:1)暂态闭环响应比较快,对输入电压的变化和输出负载的变化瞬态响应也比较快;2)控制环易于设计;3)具有简单自动的磁平衡功能;4)具有瞬时峰值电流限流功能等。
但是峰值电感电流可能会引起系统出现次谐波振荡,许多文献虽对此进行一定的介绍,但都没有对次谐波振荡进行系统研究,特别是其产生原因和具体的电路实现,本文将对次谐波振荡进行系统研究。
1 次谐波振荡产生原因
以PWM调制峰值电流模式开关电源为例(如图1所示,并给出了下斜坡补偿结构),对次谐波振荡产生的原因从不同的角度进行详细分析。
对于电流内环控制模式,图2给出了当系统占空比大于50%且电感电流发生微小阶跃△厶时的电感电流变化情况,其中实线为系统正常工作时的电感电流波形,虚线为电感电流实际工作波形。
可以看出:1)后一个时钟周期的电感电流误差比前一个周期的电感电流误差大,即电感电流误差信号振荡发散,系统不稳定;2)振荡周期为开关周期的2倍,即振荡频率为开关频率的1/2,这就是次谐波振荡名称的由来。
图3给出了当系统占空比大于50%且占空比发生微小阶跃AD时电感电流的变化情况,可以看出系统同样会出现次谐波振
荡。
而当系统占空比小于50%时,虽然电感电流或占空比的扰动同样会引起电感电流误差信号发生振荡,但这种振荡属于衰减振荡。
系统是稳定的。
前面定性分析了次谐波振荡产生的原因,现对其进行定量分析。
针对图1,图4给出了占空比扰动引起电感峰值电流误差信号变化情况,其中Vc为误差运放的输出信号,当功率管MO导通即电感电流线性上升时,Vc随之增加,反之当功率管M0关断时,Vc随之减小。
从图4可以看出当占空比在连续2个时钟脉冲下存在不对称时,系统将出现次谐波振荡。
现推导△Vc与△IL的关系,占空比扰动△D引起电感电流与误差运放输出电压的变化值分别如式(1)和(2)所示,由式(1)和(2)可推导出Vc与△IL的关系如式(3)所示:
式中:T为开关周期;m1为峰值电流上升斜率;m2为峰值电流下降斜率绝对值;七代表采样电阻。
由于次谐波振荡频率为开关频率的1/2,因此在1/2开关频率处的电压环路增益将直接影响电路的稳定性。
现推导图1的电压环路增益,在误差运放输出端叠加斜坡补偿后,设误差电压从△Vc变为△Ve,从而可推出△Vc与△Ve的关系,如式(4)所示。
由式(3)和(4)可得式(5),在稳态时可推出式(6),将式(6)代入式(5)消去m1,得式(7):
式中:m为下斜坡斜率;2表示次谐波振荡周期是开关频率的2倍。
从图4可以看出△IL是周期为2T的方波,则第1个次谐波振幅应乘以4/π。
假设负载电容为C,则从误差运放输出端到电源输出端的小信号电压增益为
设误差运放电压增益为A,则电压外环环路增益为
由环路稳定性条件可知:在l/2开关频率处,环路相位裕度为零,此时若环路增益大于l,系统就会发生次谐波振荡,因此误差运放的最大增益为:
(8)由式(8)可以明显看出,误差运放的最大增益是占空比D和斜坡补偿斜率m的函数,归一化的误差运放最大增益与D和m的关系如图5所示。
可以看出:m=O(无补偿)时,由于运放增益不能小于O,当占空比大于或等于50%时,系统就会出现次谐波振荡;m=一m2/2时,D=100%才出现次谐波振荡,但在实际电路中D<100%时就会出现振荡;m=一
m2时,误差运放最大增益与占空比无关。
当继续增大m时,对环路的稳定性影响不大,但过补偿会影响系统瞬态响应特性。
上文研究了电感电流信号变化波形对次谐波振荡产生的原因及解决办法,现从s域(或频域)角度对其进行更深入的研究。
设采样电感电流i,通过采样电阻Rs转化成电压,i(k)表示第k时钟下的电流扰动量,△Ve(k+1)为第k+1时刻的电压控制扰动量,得采样保持的离散时间函数:
由式(10)可知当没有斜坡补偿,且m1<m2即占空比大于50%时,α>1,表示有1个极点在单位圆之外,此时电流环不稳定。
将H(z)转化为s域传递函数:
式中s表示频率。
esT可用PadE可用Pade进行二阶近似:
式中Qs=2/[π(2/α-1)],即阻尼系数为1/Qs=[π(m1-m2+2m)]/[2(m1+m2)]。
式(13)即为电流环传递函数,斜坡补偿前,当m1<m2即占空比大于50%时,Qs小于0,此时电流环传递函数将在右平面产生2个极点,导致电流环路不稳定,从而整个开关电源系统都处于不稳定状态,将在1/2开关频率(即ωs/2)处发生振荡,这就是次谐波振荡的真正由来。
引入斜坡补偿后,若m>(m2-m1)/2即m>max[(m2-m1)/2]=m2/2时,Qs大于0,此时电流环传递函数的极点将出现在左半平面,此时系统也不一定稳定,只有保证电流环具有足够的相位裕度时,系统才稳定。
当m2>m>m2/2时,系统虽稳定,但此时还是会出现振铃电流,只有当m=m2即阻尼系数为π/2时,系统才能在一个周期内消除振铃电流,从而获得非常好的瞬态响应。
当m>m2时,虽然电流环相位裕度增加,但其带宽变小,即出现过补偿现象,此时会影响系统的响应速度。
2 斜坡补偿方式及电路实现
前文从几个方面研究了次谐波振荡产生的原因,并且指出斜坡补偿能防止系统出次谐波振荡,现研究补偿方式及其具体电路实现。
开关电源斜坡补偿分为上斜坡补偿与下斜坡补偿2种方式。
图6为下斜坡补偿原理,给出了下斜坡补偿时占空比大于50%的电感峰值电流波形(电流微小扰动作为激励信号)。
与图2相比,仅Ve从水平直线改为下斜坡。
从图6可以看出,引入斜坡补偿后,电流误差信号每经过一个时钟周期,幅度成比例衰减,最后消失。
图7为上斜坡补偿原理,给出了占空比大于50%的电感峰值电流波形。
其补偿原理就是在电感峰值电流a上叠加上斜坡补偿电流b,形成检测电流c,使占空比小于50%,稳定系统。
由于上斜坡补偿电路实现相对简单,一般采用上斜坡补偿。
对于斜坡补偿,斜率越大,振荡衰减越快,但补偿斜率过大,会造成过补偿。
过补偿会加剧斜坡补偿对系统开关电流限制指标的影响,从而降低系统的带载能力;另一方面,过补偿会影响系统瞬态响应特性。
通常选择斜坡补偿斜率需根据需要折中考虑。
对于Buck和Flyback转换器,补偿斜坡一般取峰值电流下降斜率m2即Vout/L,由于输出电压恒定,
所以补偿值便于计算并恒定;对于Boost电路,补偿斜坡也一般取峰值电流下降斜率m2,
即(Vout-Vin)/L但由于输入电压随电网变化,从而要求补偿值跟随输入电压的变化,此时若为了电路设计简单,强迫斜坡斜率固定,则可能出现过补偿或欠补偿现象,降低电路性能并导致波形畸变。
因Buck与Flyback转换器斜坡补偿原理电路实现基本相同,因此本文只给出了一种上斜坡补偿的Flyback斜坡补偿电路(图8所示)。
图9为本文第二作者提出的一种升压型转换器自调节斜坡补偿电路。
采用Hspice仿真软件分别对图8和图9进行仿真,仿真结果分别如图10和图11所示。
图10的振荡器频率为100 kHz。
m1为检测电流曲线,其从0慢慢上升到40μA。
虚线a,b和c代表具有不同斜率的斜坡补偿信号,线A,B和C分别为叠加后的曲线。
从图10可看出:通过改变电阻R5和R4的比值,可以得到具有不同斜坡的补偿信号。
图11中,Vsense为电感上的峰值电流流过检测电阻所产生的电压,Vslope为经上斜坡补偿后的检测电流流过检测电阻所产生的电压。
从图11可以看出,不同的输入电压对应不同的补偿斜坡,并且斜坡变化与(Vout-Vin)的变化成正比即达到了自调节功能。
3 结论
本文对峰值电流模式开关电源的次谐波振荡从定性和定量2个角度分别进行了系统研究,当占空比大于50%时,系统的电流环在1/2开关频率处出现振荡,引入斜坡补偿后能保证电流环路增益的传输函数在1/2开关频率处具有较好的相位裕度,保证系统稳定。
最后分析了上斜坡补偿和下斜坡补偿2种避免次谐波振荡的方法,并基于3种最基本的开关电源
拓扑(Buck,Flyback和Boost)给出了具体的斜坡补偿电路及仿真结果。