异步电动机定子磁链稳态估计
异步电机模型预测直接转矩控制方法_阮智勇

T u s β] , 分别为定、 转子磁链和定子电压; A11
2
逆变器驱动异步电机模型
= - a11 I; A12 = a12 I; A21 = a21 I; A22 = - a22 I + ω r J; Rs 1 0 0 -1 0 0 I = ;J = ;O = ; a11 = ; Ls σ 0 1 1 0 0 0
第4 期
阮智勇,等: 异步电机模型预测直接转矩控制方法
T 式中,ψs = [ ψ s α ψ s β] , ψr = [ ψ rα
17
T us = ψ r β] ,
量, 从而确立了基于有限控制集 MPC 思想的 MPDTC 方法。最后通过仿真对该 MPDTC 与传统 DTC 的性能作了对比评估。
[ us α
价值函数也就是 MPC 的优化准则, 其选取具有 , 多样性和灵活性 控制期望迫使电机磁链和转矩快 可以磁链和转矩的相对偏差之和为 速跟踪其参考, [10 ] 衡量 , 因此价值函数确定为 J =
* p ψ s - ψ si ( k + 1 ) ψ sN
+
p T* e - T ei ( k + 1 ) T eN
传统直接转矩控制基本原理如图 2 所示, 根据 磁链和转矩偏差以及当前磁链位置, 按开关矢量表 直接选择电压矢量作用于逆变器 。磁链估计采用全 阶观测器, 由观测到的两相静 止 α β 坐标系下的 定、 转子磁链 ψ sα( β) 和 ψ rα( β) , 可得定子磁链幅值 ψs = 电磁转矩为 Te = = = Lm 3 np ( ψ ψr ) 2 σL s L r s Lm 3 np ψ 2 σL s L r s ψr sinθ ψ sα 槡
2
异步电动机机的稳态模型

空载运行时,激磁磁势全部由定子磁势 F1=Fm
提供,即:
负载运行时,转子绕组中有电流I2 流过,产生一个同 步旋转磁势F2,为了保持Fm不变,定子磁势F1除了提 供激磁磁势Fm外,还必须抵消转子磁势F2的影响,即:
异步电动机的磁势平衡方程:
F1 F1 F Fm ( F2 ) Fm
n2+n=sn1+(1-s)n1=n1 结论:转子绕组的磁势与定子绕组的磁势转速相同, 在空间相对静止。
(3)磁势平衡方程式 激磁电流 和激磁磁势
产生主磁通 所需要的电流称为激磁电流 对应的磁势称为激磁磁势:
;
激磁磁势近似不变
由电势方程式: ;电源电压不变,阻抗压降很小,电势近似不变; 由公式: , 近似不变; 可见,激磁磁势和激磁电流几乎不变。
5
符号表
转子侧折算到定子侧
I'2 Ψ'2 E'2 Ф'2σ Ψ'2σ E'2σ Rm Lm1 Lm Xm Im Fm
(一) 异步电动机的工作原理 (二) 异步电动机的等效电路 (三) 异步电动机的功率平衡和转矩平衡关系 (四) 异步电动机的电磁转矩和机械特性 (五) 异步电动机工作特性分析(略)
转子绕组中感应电势的频率:
转子感应电势的有效值
注意转子不动时(s=1)时的感应电势与转子旋转时感应电势的关系。
转子绕组的阻抗
由于转子绕组是闭合的,所以有转子电流流过。同样 会产生漏磁电抗压降。 漏抗公式: 漏抗也与转差率正比。转速越高,漏抗越小。
异步电机磁链-定义说明解析

异步电机磁链-概述说明以及解释1.引言1.1 概述概述异步电机作为一种常见的电机类型,在工业生产中起着重要作用。
其工作原理是基于磁链的产生和控制,磁链的大小和稳定性对异步电机的性能有着重要的影响。
因此,研究和控制异步电机的磁链是电机领域的重要课题之一。
本文将深入探讨异步电机磁链的重要性以及磁链调节技术,以期为电机领域的研究和应用提供有益的参考。
1.2 文章结构本文将首先介绍异步电机的基本原理,包括其工作原理、结构特点和应用领域。
接着将重点讨论磁链在异步电机中的重要性,包括其对电机性能和运行稳定性的影响。
随后将介绍异步电机磁链调节技术,包括在不同工况下如何调节磁链以实现电机的性能优化和能效提升。
最后将对本文进行总结,并展望异步电机磁链调节技术在未来的应用前景。
整个文章结构将围绕着异步电机磁链这一主题展开,从基础原理到技术应用,带领读者深入了解这一领域的相关知识和发展趋势。
1.3 目的目的:本文旨在深入探讨异步电机磁链的重要性以及磁链调节技术,以此帮助读者更好地理解异步电机的工作原理和性能特点。
同时,通过对磁链调节技术的介绍,为读者提供在实际工程中优化异步电机性能的方法和思路。
最终旨在推动异步电机技术的发展和应用,为工业生产和能源领域的进步做出贡献。
2.正文2.1 异步电机基本原理异步电机是一种常见的电动机,其工作原理是基于磁场的相互作用。
它由定子和转子两部分组成。
定子上绕制有三相绕组,通以交流电源,产生旋转磁场。
转子则是由导体材料制成的圆柱体,处于旋转磁场中。
当定子通电后,产生的磁场会诱导出转子中的感应电流,从而在转子上产生额外的磁场。
这两个磁场之间的相互作用使得转子会跟随旋转磁场一起旋转,从而驱动机械设备工作。
异步电机的工作原理基于电磁感应定律和洛伦兹力。
根据法拉第电磁感应定律,当导体在磁场中运动时,会产生感应电动势,从而诱导出感应电流。
而根据洛伦兹力,感应电流会在磁场中受到力的作用,从而产生旋转力矩。
基于定子电流矢量定向的异步电机转子磁链估计器及其应用研究
的性能。如果再加入适当的校正环节,则可以较好地抑 制这些干扰的影响。本文提出的基于定子电流矢量定向 的转子磁链估计器不包含定转子电阻参数,除了在
极少数奇异点之外,均可保持相当高的精度。无论是开 环运行还是闭环运行,当定转子电阻发生较大幅度变化 时,估计器性能几乎不受影响。与传统的磁链估计
器相比,新型磁链估计器在抗扰动方面具有明显的优势。 有了转子磁链的精确估计作为基础,异步电机矢量控制 的关键问题就得到了解决,各种控制策略就能够
20世纪70年代出现的矢量控制,使得异步电机的控制性 能大大提高。在间接磁场定向的矢量控制中,精确地估 计(或观测)转子磁链的幅值和角度是问题的
关键。传统的磁链估计器有电压型和电流型两种。电压 型磁链估计器依赖于定子电阻,而电流型磁链估计器依 赖于转子电阻。在电机运行过程中,定转子电阻会
随着温升的变化(以及导线的集肤效应等)而变化,对 估计精度影响很大。近年来,很多学者提出了降低定转 子电阻摄动对磁链估计影响的方法。例如,将两种
中基于定子电流矢量定向的转子磁链估计疹下文中称之 为新型磁链估计器“),其原理框图如所示。与传统的 电压型和电流型估计器不同,式(15)构成的新
型磁链估计器中引入了参数W1.W1是定子电流矢量的旋 转速度,稳态时,它与电源的角频率相等;动态过程中, W1的表达式为利用霍尔传感器可以得到精
度很高的定子电流值新型磁链估计器电流型估+器新型磁 链估计器从和可以看出,由于电流型磁链估计器依赖于 转子电阻,因此在电机转子电阻发生摄动时,其
估计器配合使用,或者改进电压型估计器的纯积分环节, 等等。然而,这些改进后的磁链估计器中,仍然包含定 转子电阻参数。本文提出了一种不包含定转子电
阻参数的转子磁链估计器,换言之,定转子电阻的摄动 对磁链估计器的精度影响甚微。本文从新坐标系下异步 电机的基本方程出发,导出了基于定子电流矢量定
异步电机稳态模型和动态模型推导

A 当异步机组处于双馈状态稳态运行时,等效电路推导方式如下:参考正方向定义如下:定(转子)子相电压参考方向为从端口指向中性点,相电流参考正方向与相电压参考正方向符合关联参考方向的关系。
相电流与相磁链参考正方向符合右手螺旋定则(这一条保证了相电感是正的),相绕组磁链参考正方向与相绕组电动势参考正方向符合右手螺旋关系(根据这一条有j j d e dtϕ=-)。
我们可以看出,根据上面规定,相电动势与相电流参考正方向是一致的。
根据上面正方向定义有:j j j j u i R e =-,又因为j j d e dtϕ=-对于转子绕组一相,比如a 相,ma a ma a a r a d die i r L u dt dtσϕ=-=+-,其中ma a A A a B B a C C mr a a b b a L i L i L i L i L i L i ϕ=+++++可参考清华大学电机系ftp 孙旭东老师异步电机课件,注意我这里用得是ma ϕ表示a 相绕组主磁通,mr L 表示转子1相绕组主自感,r L σ表示转子一相漏自感: 对于定子一相绕组,比如A 相:mA A mA A A s A d die i r L u dt dtσϕ=-=+-,mA ms A AB B AC C Aa a Ab b Ac c L i L i L i L i L i L i ϕ=+++++可参考清华大学电机系ftp 孙旭东老师异步电机课件,注意我这里用得是mA ϕ表示A 相绕组主磁通,ms L 表示定子1相绕组主自感,s L σ表示定子一相漏自感。
三相对称稳态时,我们看在静止位置坐标系中,ma a ma a a r a d die i r L u dt dt σϕ=-=+- mb b mb b b r b d die i r L u dt dt σϕ=-=+-mc c mcc c r cd die i r L u dt dtσϕ=-=+-转子三相瞬时主电动势综合矢量是:()()()23232323a b c a b c a b c a b c j j j ma mb mc j j j a b c a j j j a b c rr r j j j a b c e e e e e e i e i e i e r di di di L e L e L e dt dt dt u e u e u e θθθθθθθθθσσσθθθ⋅+⋅+⋅=⋅+⋅+⋅+⎛⎫⋅+⋅+⋅- ⎪⎝⎭⋅+⋅+⋅即:23a b c j j j a b c mr r a r r r r di di di E I r U L e L e L e dt dt dt θθθσσσ⎛⎫=-+⋅+⋅+⋅ ⎪⎝⎭其中()23a b c j j j mr ma mb mc E e e e e e e θθθ=⋅+⋅+⋅ ,()23a b c j j j r a b c U u e u e u e θθθ=⋅+⋅+⋅三相对称稳态时:不妨设()0cos a mr s r i I t ωα=+,02cos 3b mr s r i I t πωα⎛⎫=+-⎪⎝⎭,04cos 3c mr s r i I t πωα⎛⎫=+-⎪⎝⎭,其中12s ωωω=- 所以:()00023224sin sin sin 333ab c a b c j j j a b c r r j j j mr r s s r s r sr di di di e L e L e dt dt dt I L t e t e t e θθθσσθθθσππωωαωαωα⎛⎫⋅+⋅+⋅= ⎪⎝⎭⎛⎫⎛⎫⎛⎫-+⋅++-⋅++-⋅ ⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭三相对称稳态时,在静止坐标系中,不妨设:20a r t θωθ=+,所以2023b r t πθωθ=++,2043c r t πθωθ=++ 转子电流三相综合矢量()23a b c j j j a b c I i e i e i e θθθ=++在静止坐标系中是:()()()()()20202024330000202233224cos cos cos 33323cos sin 32a b c a b c r r r j j j j j j r a b c a b c j t j t j t mr s r mr s r mr sr mr s r r I i e i e i e i e i e i e I t e I t e I t e I t t j θθθθθθππωθωθωθππωαωαωαωαωθω⎛⎫⎛⎫++++ ⎪ ⎪+⎝⎭⎝⎭=++=++=⎛⎫⎛⎫⎛⎫+++-++- ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭=++++ ()()()()020100020s r r r r s r r j t t mr j t mr t t I e I eωαωθωαθαωθ++++++++==同理,可以推得:()100r r j t mr mr E E e ωβθ++= ()100r r j t mr mr U U e ωγθ++=所以:()()()202000020023224sin sin sin 3332sin sin 323a b c a b c r r j j j a b c r r r j j j mr r s s r s r sr j t j t s r s r mr r s di di di L e L e L e dt dt dt I L t e t e t e t e t eI L θθθσσσθθθσπωθωθσππωωαωαωαπωαωαω+++⎛⎫⋅+⋅+⋅ ⎪⎝⎭⎛⎫⎛⎫⎛⎫=-+⋅++-⋅++-⋅ ⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭⎛⎫+⋅++-⋅ ⎪⎝⎭=-()()()()()()200234300200020020204sin 323sin cos 32cos sin r s r j t s r mr r s s r r s r r j t t mr r mr r s s r r r r s s t e I L t t j t t jI L e jI L t t j t t πωθσσωαωθσωωαωθωαωθπωαωωαωθωαωθω⎛⎫ ⎪⎝⎭⎛⎫++ ⎪⎝⎭+++⎛⎫+ ⎪ ⎪ ⎪⎛⎫ ⎪+-⋅ ⎪ ⎪⎝⎭⎝⎭=-+++-+=-++++++-+++=这一步错了,正负号反了()()()()()()()()()()()0100020002002002002023sin cos 3223=cos sin 322332r r r s r r sj t mr r s r r smr r s s r r s r r mr r s s r r s r r t t mr r s t s r mr jI L ejI L I L t t j t t I L j t t j t t I L j e j L I e ωαθσσσσωαωθσωασωωωωαωθωαωθωωαωθωαωθωω++++++=-=--+++-+++--+++++++=--=正确的过程应该是:()()()2011r r t s r mrr mrr mrj L I j s L I s j L I ωθσσσωωω++===其中s 是转差率,即1211s s ωωωωω-== 设:1r r X L σσω=则上式子等于()1r mr r mr s j L I sX I σσω=所以 :23a b c j j j a b c mr r a r r r r r a r r r sr a r r rdi di di E I r U L e L e L e I r U jI L dt dt dt I r U jsX I θθθσσσσσω⎛⎫=-+⋅+⋅+⋅=-+ ⎪⎝⎭=-+所以:mr a a r r r r r r r E r r U U I jX I I jX s s s s sσσ⎛⎫=-+=+- ⎪⎝⎭对于定子,可以类似推导出类似的公式:()ms s sa s s s s as s s E I r U jX I I r jX U σσ=-+=+-对于磁链,同样有:()2221112224coscos cos cos cos 3333a A a ma mr a ab b ac c aA A aB B aC Cmr a mr b mr c ms a A ms a B ms a L i L i L i L i L i L i N N N L i L i L i L i L i L N N N ϕππππθθθ=+++++-⎛⎫⎛⎫=++++-+- ⎪ ⎪⎝⎭⎝⎭这个推导对于具有如下性质的异步电机成立:异步机组定子和转子相绕组轴线重合时,此时给定子相和转子相绕组通流向电机内部的电流,()222111a 2224coscos cos cos cos 3333ma mr a ab b ac c aA A aB B aC Cmr a mr b mr c ms a A ms a B ms a L i L i L i L i L i L i N N N L i L i L i L i L i L N N N ϕππππθθθ=+++++-⎛⎫⎛⎫=++----- ⎪ ⎪⎝⎭⎝⎭如果定子和转子相绕组产生的磁通方向一致,那么上面那个推导成立。
双三相异步电动机直接转矩控制定子磁链观测的研究
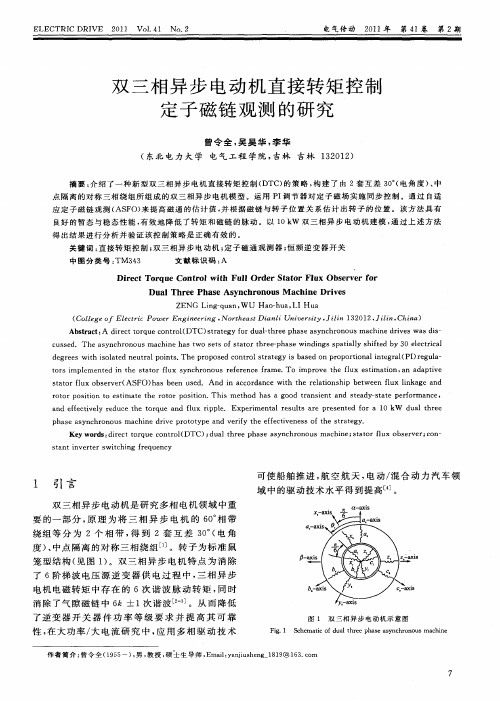
一种异步电机定子磁链弱磁控制方法
输出能力依赖于控制策略, 参考磁链过高或过低 都 将导致输出转矩下降。传统的弱磁方法不能在已有 的限制条件下获得电机的最大转矩输出能力[ 6] 。文 献[ 7] 和文献[ 8] 分别提出的基于电压闭环控制和稳 态电机方程的弱磁方法, 能够输出最大转矩, 却都基 于转子磁链准确定向, 不适合需要定子磁链闭环的 方案。文献[ 9] 提出的方法避开了复杂的电机方程, 却需要引入电压电流调节器来控制定子磁链给定。
用文献[ 10] 所述的间接转矩控制方案, 对异步电机
直流电机系统进行了仿真和实验研究。
实验平台 中主电路为三 相两电平电压型 逆变
器, 控 制 电 路 的 核 心 由 TMS320C32 主 控 芯 片 和 FPGA( Field Programmable Gate Array, 即 现场可编程
门阵列) 构成, 控制周期为 200%s。采用离散模型进
图 2 为电机从静止开始加速到 3 倍额定转速的过程
中, 电机输出的电磁转矩和定子磁链幅值的变化情
况。所有 变量均 为标 么值, 其 中电 磁转矩 基值 为
26#53N!m, 定子磁链基值为 1#71Wb。可以看出, 弱 磁区, 使用本文方法电机的电磁转矩输出大于传统
的转速反比法, 且整个过程过渡平滑。如图 2 中虚
Iq
( 10)
i* sd=Um Nhomakorabeax2
- ( L∀s Imax ) 2
e
L
2 s
-
L
∀2 s
;
i = * sq,m ax
降功率区
I2 max
-
i* 2 sd
无轴承异步电机的定子电流矢量定向转子磁链估计

进行 了系统仿 真分析 ,仿真结果表明了所给转子磁链估计器算法的有效性 。
关键词 :无轴承异步 电机 ;转子磁链 ;传统模型 ;定子 电流矢量定 向 中图分类号 :T 3 6+. M4 2 文献标志码 :A 文章编号 :10 -8 8 2 1 )80 0 40 0 164 (0 2 0 ・0 1 -4
WA G S aj , U We sa ,Z A i , uC n l N hoi B nh o H ILl Z o gi e i n ( ea n esyo i c a dTcn l y L oa g4 0 , hn ) H n n U i r t fS e e n eh oo , u yn 7 0 3 C i v i c n g 1 a
种不 包含 定转 子 电阻 参 数 的转 子 磁链 估 计 器 , 以解
统 。对 转矩 系统采用气 隙磁场 定 向控制 ,便于 实现 电 磁转矩 和悬浮 力的有效解 耦 ,但 其控 制算 法具 有高 度 非线 性 ,最 大转矩 限制 等缺 点 ;而转 子 磁场定 向控 制 具备 良好 的调 速性能 ,算 法 简单 等优点 ,若 能在转 矩
异步电动机的磁势平衡

异步电动机的磁势平衡1.定子绕组的磁势幅值:F1=(m1/2).(0.9*I1N1./p)kw1转速:n1=60f1/p2.转子绕组磁势有效值:F2=(m2/2).(0.9*I2N2/p)kw2转速:转子电流的频率f2=sf1转子磁势F2相对于转子的转速:n2= 60f2/p = 60 sf1/p= sn1= n1-n转子磁势F2相对于空间的转速为n2+n=(n1-n)+n=n1结论:定、转子磁势在空间相对静止,均以同步速n1旋转。
3.磁势平衡方程式激磁电流Im产生激磁磁势Fm建立主磁通Φ1所需要的电流为激磁电流Im 。
激磁磁势的幅值为:Fm=(m1/2).(0.9*ImN1/p)kw1激磁磁势近似不变由电势方程式:U1=-E1+I1(R1+jX1σ)= -E1+I1Z1电源电压不变,阻抗压降很小,电势近似不变;由公式:U1=4.44f1N1Φ1kw1,Φ1近似不变;可见,励磁磁势和励磁电流几乎不变。
空载运行时,励磁磁势全部由定子磁势F0供应,即:F0=Fm负载运行时,转子绕组中有电流I2流过,产生一个同步旋转磁势F2,为了保持原Fm不变,定子磁势F1除了供应激磁磁势Fm外,还必需抵消转子磁势Fm的影响,即:F1=F1F+Fm=(-F2+Fm)异步电动机的磁势平衡方程:F1 + F2 = Fm; 即(m1/2)(0.9*I1N1/p)kw1+(m2/2)(0.9*I2N2/p)kw2=(m1/2)(0.9*ImN1/p)kw1I1+[(m2N2kw2)/(m1N1kw1)]I2=I1+I2/ki=Im结论:空载运行时,转子电流近似为0,定子电流等于励磁电流;负载时,定子电流随负载增大而增大。
异步电机调速系统中转矩和磁链变化率的分析及预测控制

Hu e at 0 0 0 ,C ia hh oe 1 15 hn )
Abs r t The ls ia d rc t r e o r l tae y o a y c r no s tac : ca sc l ie t oqu c nto srt g fr s n h o u moo h s e n e eo e i r c n tr a b e d v lp d n e e t y a s,b tc ul ta ayz h o qu n t trfu e iae h i x r s insa d t e trv l g a l . Th , er u o d’ n l e te tr e a d sao x d rv tsbyt ere p e so n hev co ot e tb e l a us
p e it e dr c o q e c nr ltc n q e w s s o e n mii g t e t r u n ttrfu p l s T e e p s o e r d ci i ttr u o t e h i u a h w d mi i zn oq e a d sa o x r p e . b x h w d v e o h l i
t ts se c n r d e te t r ue rp e a mprv he c re twa e om fsao . Th s y t ha y tm a e uc h o q pl nd i o e t u r n v f r o t tr i i s sem lo ha o d d — a s d g o y n mi n t t ro ma c a c a d sai pe r n e. c f
( .C l g f l tcl n o e n ier g T iunU i r t o eh ooy 1 o eeo e r a ad P w rE gnei , a a nv sy f cn l , l E ci n y e i T g
三相异步电机中定子绕组的磁力计算

一、定子绕组中的电磁关系如图(a )所示,A 、B 和C 三相定子绕组对称放置在定子槽中,及三相绕组的首端U 1,V 1,W 1(或末端U 2,V 2,W 2)的空间位置互差120°。
三相绕组连接成星形,末端U 2,V 2,W 2相连,首端U 1,V 1,W 1接到三相对称电源上,则在定子绕组中通过三相对称电流i A ,i B ,i C (电流参考方向由首端指向末端)。
(b)(c)(a) (d)(e)(f)()()︒+=︒==120t sin I i 120-t sin I it sin I i m C m B m A ωωω三相对称电流的波形如图(b)所示。
当三相电流流入定子绕组时,各相电流的磁场为交变、脉动的磁场,而三相电流的的合成磁场则是一旋转磁场。
如图(c)、(d)、(e)和(f)为几个不同瞬间:1、ωt=0瞬间(i A=0,i B为负值,i C为正值):此时U相绕组(U1 U2绕组)内没有电流;V相绕组(V1V2绕组)电流为负值,说明电流由V2流进,由V1流出;而W相绕组(W1W2绕组)电流为正值,说明电流由W1流进,由W2流出。
运用右手螺旋定则,可以确定这一瞬间的合成磁场,如图(c)所示,为一对极磁场。
2、ωt=60°瞬间(i A为正值,i B为负值,i C=0为正值):此时U相绕组(U1 U2绕组)电流为正值,说明电流由U1流进,由U2流出;V相绕组(V1 V2绕组)未变,电流为负值,说明电流由V2流进,由V1流出;而W相绕组(W1W2绕组)内没有电流。
合成磁场,如图(d)所示,同ωt=0瞬间相比,合成磁场沿顺时针方向旋转了60°。
3、ωt=120°瞬间(i A为正值,i B=0,i C为负值):合成磁场沿顺时针方向又旋转了60°,如图(e)所示。
4、ωt=180°瞬间(i A=0,i B为正值,i C为负值):同ωt=0瞬间相比,合成磁场沿顺时针方向共旋转了180°,如图(f)所示。
异步化同步发电机的静态稳定性研究

éuٛdsùٛ êٛ úٛ
êérٛٛs
êuٛqsúٛ êٛ rs
0 ùٛé-ٛ ids ùٛ
úúٛٛêê-ٛٛ
iq
s
úٛ úٛ
êêuٛٛo
s
úٛ úٛ=
êٛ êٛ
rs
úٛê-ٛ úٛêٛ
io
s
úٛ úٛ+
êuٛdrúٛ êٛ
rr
úٛêٛidr úٛ
êٛ úٛ êuٛqrúٛ
êٛ êٛ
rr
úúٛٛêêٛٛiqr
基于异步化同步发电机定子回路电压方程 ( 7 ), 忽略定子电阻,可绘出其稳态运行相量图,如图 2 所示:
.
E
E sin d
j
. jxs Is
. U
d
.
Is
j
图 2 异步化同步发电机稳态运行相量图
Fig.2 P h a sor d iagr am of a syn ch r on ized syn ch r on ou s gener ator under nor m al oper ation
统同步发电机具有完全相同的功-角特性方程。有
所 不 同 的 是 : 在 异 步 化 运 行 时 , 式 ( 1 1 )中空载电势
E 是由外部给定励磁 U r 与转子滑差感应电势 Er 的 合成电压所形成的转子励磁电流而决定,它与滑差
关系密切。
3.2 用暂态电势 E ¢,ٛ 暂态电抗 xs¢表ٛ 示异步化同步 发电机
KEY W ORDS: asynchronized synchronous generator; rotor slip inducted potential; static state stability; alternating current excitation
异步电动机定子磁链稳态估计

异步电动机定子磁链稳态估计
1异步电动机定子磁链稳态估计
异步电动机是一种常用的发电机,它可以以一定的频率发电。
定子磁链是发电机内最重要的部件,它由风门、导线圈和顶环组成,为发电机的正常工作提供了足够的电动势。
随着发电机的改造和升级,发电机的定子磁链状态也发生了变化,需要经常对其进行估计。
2异步电动机定子磁链估计方法
目前,从理论上估计定子磁链状态的方法有多种。
可用传统定子磁链检测法、电流法、基于双绕组实验学习的数据库进行定子磁链稳态估计。
①传统定子磁链检测法已经被广泛使用,根据定子磁链的形状和构造,通过直接或间接的方法测量其形变和形状,从而估计其状态,给出合理的诊断结果。
②电流估计法是根据发电机的额定特性曲线,通过观察电流的变化特征,记录定子磁链的负荷特性,并从中提取特征信息,推断出定子磁链状态。
③基于双绕组实验学习的数据库是近年来比较成熟的一种估计方法,它利用实验所获得的大量数据,建立定子磁链状态的数据库,分析不同的发电机负荷状态和特性,从而给出定子磁链稳态估计。
3异步电动机定子磁链稳态估计的应用
定子磁链稳态估计非常重要,有助于发电机正常工作。
定子磁链估计结果可以帮助电力工程师更好地控制发电机,控制功率调整、保护和检修等工作,指导定子磁链检查和调整,以保证发电机安全可靠的运行。
同时,还可以指导电力企业进行维护和管理,在正常运行中避免停电现象的发生。
总的来说,异步电动机的定子磁链稳态估计是很有必要的,它可以从逻辑、理论、实验和应用等方面提供准确的估计结果,控制发电机运行,保证安全可靠的运行。
矢量控制系统中异步电动机参数的估算和测量重点

矢量控制系统中异步电动机参数的估算和测量马小亮(天津电气传动设计研究所, 天津300180摘要:异步电动机矢量控制系统需要电动机电阻和电感参数。
介绍了在调试时, 面对1台电机如何估算和测量这些参数, 方法有:用电动机铭牌或样本数据估算参数, , 利用变频器测取参数及在运行中修正参数。
关键词:矢量控制; 异步电动机; 参数估算和测量中图分类号:TM343 Measuring of InductionMotors for V ector Control SystemsMA Xiao -liang(Tianj in Desi gn &Research I nst. of Elect rical D rives , Tianj in 300180, ChinaAbstract :Induction motor vector control systems need resistance and inductance parameters of motor. How to estimating and measuring the parameters when you face on a motor was introduced. The methods are :estimating parameters f rom motor name plate or catalogue ;measuring parameters by means of motor no -load and short -circuittests ;measuring parameters by means of inverters ;correcting parameters during motor oper 2ating. These methods are the bases of self -adjusting f unction designing of inverters also.K ey w ords :vector control ;induction motor ;estimating and measuring of parameters作者简介:马小亮(1939- , 男, 教授级高工, 博士生导师,Email :xlm_td@1引言异步电动机矢量控制系统需要定、转子电阻, 定、转子漏感和互感等参数, 它们对电动机带负载能力影响很大, 在无转速传感器系统中这些参数还直接影响转速精度, 本文介绍如何获得这些参数。
交流异步电机电压稳态方程

交流异步电机电压稳态方程一、异步电机的基本概念异步电机,又称感应电机,是一种广泛应用于工业领域的电机。
它以其高效、可靠、经济等特点在我国的电力系统中占据着重要地位。
异步电机的工作原理是利用旋转磁场在导体中产生电磁力,使转子得以运转。
其主要由定子和转子两部分组成,定子负责产生磁场,转子则负责将磁场转化为机械能。
二、异步电机电压稳态方程的推导在了解异步电机电压稳态方程之前,首先需要了解其数学模型。
异步电机的数学模型包括电流方程、电压方程和功率方程。
在稳态条件下,我们可以推导出异步电机的电压稳态方程。
1.电流方程:根据基尔霍夫电流定律,可以得到定子电流和转子电流的关系。
2.电压方程:根据欧姆定律,可以得到定子电压和转子电压的关系。
3.功率方程:根据电功率的定义,可以得到定子功率和转子功率的关系。
通过以上三个方程,我们可以得到异步电机的电压稳态方程。
三、电压稳态方程的应用电压稳态方程在分析和控制异步电机中具有重要作用。
它可以帮助我们了解电机的运行状态,预测电机的性能,以及优化电机的控制策略。
在实际应用中,电压稳态方程可以用于以下方面:1.电机的启动和制动控制:通过电压稳态方程,可以设计出适用于不同工况的启动和制动策略。
2.电机的调速控制:电压稳态方程可以用于分析电机的转速与电压、电流之间的关系,从而实现电机的调速控制。
3.电机的故障诊断:通过分析电压稳态方程,可以检测电机是否存在故障,以及故障的类型和程度。
四、结论与展望本文对异步电机的电压稳态方程进行了详细的推导和分析。
电压稳态方程在分析和控制异步电机中具有重要意义。
随着电机控制技术的不断发展,电压稳态方程的应用将更加广泛,有助于提高电机的运行效率和可靠性。
在未来的研究中,我们可以从以下几个方面进行拓展:1.对电压稳态方程进行改进,以适应更复杂的工况。
2.探索电压稳态方程在新型电机控制策略中的应用。
基于加权模型的异步电动机直接转矩控制定子磁链估计

枣庄学院学报
J OUR NA L O F Z AO ZH UAN G UNI V ER S ⅡY
0c t . 2 0 1 3
V0 】 . 3 0 N0. 5
基 于 加 权 模 型 的异 步 电动 机 直 接 转 矩 控 制定 子磁 链 估 计
1 定 子磁 链估 计 的加权 模 型
为 了 实 现 定 子 磁 链 估 计 的 —i 模 型 和 i—n模 型 之 间 的 平 滑 切 换 , 本 文 提 出 了一 种 新 的模 型 , 即加 权 模 型. 该 模 型 的原 理 是 : 以 3 0% 额 定 转 速 为 中 点 , 在 此 转 速 的邻 域 内 , 让 定 - T - - 磁链估计模 型 由 i —n模 型 平 滑 过 渡 到 一i 模 型 , 使 得 在 异 步 电 动 机 的 全 速 运 行 范 围 内都 能 准 确 地 估 计 定 子 磁 链 . 为 了研 究 方 便 , 取 2 5% 额 定 转 速 到 3 5% 额 定 转 速 为 模
0 引 言
在 异 步 电动 机 直 接 转 矩 控 制 系 统 中 , 在 电动 机 全 速 运 行 范 围 内 准 确 无 误 地 估 计 定 子 磁 链 是 实 现 控 制 系 统 高 动 态 性 能 的 前 提 和 保 证 …. 定 子 磁 链 估 计 的 基 本 模 型 分 为 电压 一 电 流模 型 ( —i 模 型 )、 电 流 一转 速 模 型 ( i— n模 型 )和 电 压 一 转 速 模 型 ( 一 n模 型 )三 种. —i 模 型是 用 定 子 电压 和 定 子 电 流来 确 定 定 子 磁 链 的模 型 . 这 种 模 型最 简单 , 在计 算 过 程 中 所 唯 一 需 要 知 道 的 电 机 参 数 是 易 于 确 定 的 定 子 电 阻 .这 种 模 型 只 有 在 被 积 分 的 差 值 较 大 时 才 能 提 供 正 确 的结 果 , 只有 在 1 0% 额 定 转 速 以 上 , 特别是在 3 0% 额 定 转 速 以 上 时 , 才 能够非常准确地估计 定子磁链. i— n模 型 是 用 定 子 电 流 和 转 速 来 确 定 定 子 磁 链 的
估计定子磁通的平衡方程

估计定子磁通的平衡方程摘要:一、引言二、估计定子磁通的平衡方程基本概念三、估计定子磁通的平衡方程推导过程1.定子磁通的计算2.磁链守恒定律3.建立平衡方程四、结论正文:一、引言在电机运行过程中,定子磁通对于电机的性能起着至关重要的作用。
为了更好地理解和控制电机的运行状态,我们需要研究定子磁通的平衡方程。
本文将详细介绍估计定子磁通的平衡方程的推导过程及基本概念。
二、估计定子磁通的平衡方程基本概念在研究定子磁通的平衡方程时,首先需要了解一些基本概念,包括定子磁通、磁链守恒定律等。
1.定子磁通:在电机中,定子磁通是指定子磁场与气隙磁场之间的磁通量。
定子磁通的大小和方向对电机的转矩、电流和电压等参数产生影响。
2.磁链守恒定律:磁链守恒定律是指在一个封闭系统中,磁链的总和在任何时刻都保持不变。
磁链是磁场线通过某个面积的数量,可以表示为Φ=B·S,其中B 为磁场强度,S 为面积。
三、估计定子磁通的平衡方程推导过程1.定子磁通的计算:首先需要计算定子磁通,根据安培环路定理,定子磁通可以表示为Φs = ∫B·dS,其中B 为定子磁场强度,dS 为气隙面积元。
2.磁链守恒定律:在电机运行过程中,磁链守恒定律始终成立。
根据磁链守恒定律,定子磁通与气隙磁场磁通之和等于定子电流产生的磁场磁链,即Φs = Φg + Φi。
3.建立平衡方程:根据磁链守恒定律,我们可以建立一个关于定子磁通的平衡方程。
考虑到定子磁通与气隙磁场磁通之间的关系,可以得到:Φs = Φg + Φi = B·Sg + BI·Si,其中Sg 和Si 分别为气隙和定子铁心的有效面积。
四、结论通过以上分析,我们得到了估计定子磁通的平衡方程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
根据异步电动机的电压模型, 可得到纯积分估 计定子磁链的方法
收稿日期: 2009- 01- 15 基金项目: 国家自然科学基金资助项目( 50777003) 作者简介: 冬雷( 1967 ) , 男, 博士, 副教授, E mail: pemc. bit @ 163. com.
[
!2c +
!2 s ref
/
!sref , % ) , 电机起动时, !s 很小, 则
A u 值很大, 在理想状态下( 即电流、电压检测量无误
差) , 此时前一次磁链的迭算值也很小, 则两项相乘
的值也不会很大, 是符合实际情况的. 但是由于电
流检测量中直流分量的存在, 以 轴磁链计算为例,
离散化的 轴磁链计算公式为
( 6) 将式( 6) 代入式( 5) , 则有
y ( t) =
Ce- !ct +
!c sin ( !s t) !2c +
!s c o s !2s
(
!s t)
.
( 7)
又根据初始条件 y ( 0) = 0, 可得
C = !s/ ( !2c + !2s ) .
( 8)
将式( 8) 代入式( 7) , 则可得一阶微分方程式( 4)
算法可以有效估计出异步电动机定子磁链. 该算法计算简便, 对硬件要求不高, 非常适用于高性 能的通用异步电动
机控制.
关键词: 异步电动机; 磁链估计; 一阶惯性; 补偿算法
中图分类号: T M 343
文献标志码: A
文章编号: 1001 0645(2010) 03 0311 05
Steady State Estimation of Stator Flux of Induction Machines
移及死区导致 的电压误差都会使得纯 积分环节恶 化[ 1 0] . 积分运算还会产生积分漂移和初值问题. 这 些都不可避免地影响了定子磁链估计的准确性. 为 此有人提出了用一阶惯性代替纯积分的方法, 这样 又带来了相移和幅值衰减的问题[ 11] .
作者提出了稳态时一阶惯性加补偿的方法来代 替纯积分算法. 该方法利用一阶惯性消除了纯积分 带来的的漂移问题, 又通过补偿消除了纯积分带来 的幅值衰减和相移的问题. 在异步电机稳态控制中 取得了较好的控制性能.
图 1 磁链估计仿真波形 Fig. 1 Simul at ion res ult of f lu x est imat ion
则定子磁链电压模型可以改写为
sX =
s
1 +
!c (
u sX
-
Rs isX ) ,
( 2)
式中 X = , . 一阶惯性环节的截止频率 !c 一般取
转子时间常数的倒数. 因为当 !c 取值过小时, 会导
第 30 卷 第 3 期 2010 年 3 月
北京 理工大 学学 报 T r ansactio ns of Beijing Institute of T echnolo gy
V ol. 30 N o. 3 M ar. 2010
异步电动机定子磁链稳态估计
冬雷1, 杨栋2, 贾菲1, 邵立伟1, 廖晓钟1
图 5( a) 为一阶惯性加补偿磁链估计方 法在启
动过程中的磁链估计曲线. 由图 5( a) 可以看出, 一阶惯性加补偿方法在电
机起动初期( 即电机的动态时期) 磁链估计有很大误 差, 在低频时尤其明显. 注意到幅值补偿倍数为 A u
=
!2c + !2s / !s , A u 值 的 变 化 范 围 为
由以上分析可以看出, 电机稳态时, 在一阶惯性 代替纯积分磁链估计方法中加入幅值和相位补偿即 可实现准确估计定子磁链. 一阶惯性加幅值和相位 补偿磁链估计方法的结构图如图 3 所示.
图 3 一阶惯性加补偿方法的结构图 Fig. 3 O ne order in ert ia w it h compensat ion m et hod
31 2
北京 理 工 大学 学 报
第 30 卷
# s = ( us - R si s ) dt, ( 1)
# s = ( us - R si s ) dt .
式中: s , s 为静止坐标系 下的定子磁链; us , us 为静止坐标系下的定子电压; i s , i s 为静止坐标系 下的定子电流; Rs 为定子相电阻. 式( 1) 中包含有 纯积分环节, 在实际系统中, 由于存在积分漂移和初 值问题而无法应用, 图 1( a) 为纯积分磁链估计方法 的仿真波形, 给定定子频率为 10 H z, 定子电流加入 0 03 A 直流分量来模拟电流采样电路中的 直流偏 置误差. 由于积分漂移的影响, 定子的磁链估计远 远地背离了实际值, 为此可以采用一阶惯性环节来 代替纯积分, 抑制磁链轨迹的漂移, 见图 1( b) .
# y ( t) = Ce- !ct + e- !ct s in ( !st ) e!ct dt , ( 5 )
# 其中 sin ( !st ) e!ct dt 可以表示为
#sin ( !st ) e!ct dt =
!c sin ( !s t) !2c +
!s c o s !2s
(
!s t)
e!ct .
y ( t) =
!s !2c +
!2s e- !ct +
cos ( !s t + ∀) , !2c + !2s
( 11)
式中 ∀= arct an ( !c/ !s ) . 由式( 11) 右边第 1 项可以
看出, 当 t ∃ %
时,
!2c
!s +
!2s e-
!c t
∃ 0,
因此一阶惯性
可以克服纯积分的初值问题.
异步电动机磁链的准确估计在实现高性能电机
控制中具有非常重要的作用[ 1- 3] , 目前获得磁链的 方法主要有: 基于开环模型方法; ! 基于闭环模 型观测器方法; ∀ 基于高频信号注入的方法[ 4] .
基于高频信号注入的方法需要在异步电机的定 子绕组中注入高频信号, 通过电机的非理想特性如 磁饱和效应等获取电机磁链的幅值和方向[ 5- 6] . 基 于观测器的方法在获取异步电动机磁链方面具有较
( 1 北京理工大学 自动化学院, 北京 100081; 2 中国兵器科学研究院, 北京 100089)
摘 要: 在异步电动机的矢量控制中, 需要 准确地估计出电机的磁链, 通常所用的纯积分方法对 异步电机磁链的估
计会 带来很大误差. 通过对异步电动机稳态模型的分析提 出了一阶惯性加补偿的方法来代替纯积分算 法. 利用 该
图 4 为给定定子频率为 1 H z, 电机运行在稳态 时, 轴磁链实际值和一阶惯性加幅值补偿, 一阶惯 性加幅值、相位补偿估计值的对比仿真曲线.
图 4 轴定子磁链曲线对比 Fig. 4 axis st at or f luxes comparison
由图 4 的仿真曲线可以看到, 一阶惯性加幅值 和相位补偿的方法在电机稳态运行的过程中, 即使 是在定子频率为 1 H z 的情况下, 也可以对一阶惯性 环节所造成的幅值衰减和相位超前进行补偿, 准确 地估计定子磁链.
致磁链收敛速度变慢, 动态响应差, 磁链估计的动态
过程差; 当 !c 取值过大时, 磁链估计的动态效果好,
但是幅值衰减和相位偏移严重. 图 2 为 轴磁链实
际值和一阶惯性法估计值的对比仿真曲线, 其中 !c
= 7 416 7 rad/ s, 给定定子频率为 1 H z.
图 2 一阶惯性方法磁链估计仿真波形 Fig. 2 Simu lat ion f lux w aveform s of on e order inertia met h od
s ( n+ 1) = [ us ( n) - is ( n) Rs ] T c +
s ( n) + i s er r Rs ,
( 12)
式中 i s er r 为定子电流检测值的直流分量在 轴的分
量. 由式( 12) 可以看到, 磁链的估计值中包含两部
分: 实际磁链值和误差项. 在磁链建立初期, 误差项
好的竞争优势, 能够获得较高的精度, 并且能够同时 获得 多 个 必 要 的 电 机 参 数, 如 转 速、定 子 电 阻 等[ 7- 9] . 然而该方法算法复杂, 对控制核心 CPU 的 性能要求非常高.
直接计算的方法求取异步电动机的磁链简便可
靠, 但是会遇到纯积分算法. 纯积分方法虽然很简 单, 但是当电机低速运行时, 定子电阻误差、直流偏
Abstract: T he steady st at e model of induct io n machine is analyzed and a new met ho d of induct ion machine st at or f lux est imat io n is presented using o ne o rder inert ia w it h co mpensat ing method instead of pur e int eg ratio n o f back EM F method t o estimat e st at or f lux of induct io n machines. T he new method is simple less hardw are is required, and is suit able f or hig h perf ormance cont ro l of induct ion machines. Key words: induct ion machine; f lux estim at ion; one order inert ia; compensat ing m et hod