CMA盲均衡算法研究
归一化LMS-CMA 盲均衡_水声信道常数模盲均衡:理论、算法与仿真_[共2页]
![归一化LMS-CMA 盲均衡_水声信道常数模盲均衡:理论、算法与仿真_[共2页]](https://img.taocdn.com/s3/m/870347b7ddccda38376baffd.png)
第3章 变步长常数模盲均衡算法55 通常的变步长盲均衡算法思路是[47]:在算法的初始阶段,采用较大的学习步长,获得较快的收敛速度;当算法趋于收敛后,逐渐减小学习步长,从而获得较小的失调量。
不同的调节学习步长变化的算法就构成了不同的变步长盲均衡算法。
设计变步长盲均衡算法应当遵循这样的原则[48, 49]:①步长值的变化规律符合自适应盲均衡在算法迭代至不同阶段对步长值大小的需求,即步长值的变化是由大到小逐渐变化的;②设置的步长控制函数应该具有更少的人为设置参数,在许多变步长盲均衡算法中,为了实现对步长变化的有效控制,往往引入人为设置参数,这些参数缺乏设计的理论依据,完全凭借人工经验,同时,在不同的通信系统中,该类参数常常不具有通用性;③步长值控制函数具有灵敏性,即步长值的变化应该随着算法迭代过程中瞬时梯度、瞬时误差等盲均衡算法的可计算参数迅速调整变化,不具有时滞性;④具有冷启动能力,即当信道特性发生突然变化后,步长值能够迅速恢复到最初始状态,实现对通信信道快速跟踪的目的。
设定步长控制函数为()n φ,那么()n φ应该具有式(3-1)的变化规律,即opt 1=0()0=n n n n φ⎧⎪=⎨⎪⎩,, (3-1)即在迭代开始,应该保证步长控制函数为1,当达到稳态收敛后,步长控制函数应该为0,其中,opt n 表示达到稳态收敛后的迭代次数。
3.2 基本变步长LMS-CMA 盲均衡3.2.1 归一化LMS-CMA 盲均衡归一化LMS 算法是一种最简单有效的变步长自适应算法[50, 51],在LMS-CMA 盲均衡中,均衡器的权系数更新式为*(1)()()()()()w n w n n e n y n x n μ+=+ (3-2) 其中,T 1()()()n y n y n μ= (3-3)为了进一步保证归一化LMS-CMA 的稳健性,在式(3-3)对步长值进行了修正,即T 1()()()()n n y n y n μμφμγ==+ (3-4) 其中,μ为控制算法失调量的固定收敛因子;γ为一小的正常数,避免由于分母。
cma均衡算法
cma均衡算法
CMA均衡算法(Covariance Matrix Adaptation Evolution Strategy)是一种优化算法,通常用于优化连续参数的问题。
该算法通过逐代进化来逐步逼近最优解。
CMA均衡算法的核心思想是利用协方差矩阵来自适应地调整搜索空间。
算法通过维护一个搜索过程中的样本集合,并同时更新样本集合的均值向量和协方差矩阵,以达到逼近最优解的目的。
具体算法步骤如下:1. 初始化算法参数,包括种群大小、初始均值向量、初始协方差矩阵等。
2. 根据当前均值向量和协方差矩阵生成一组样本,样本数量等于种群大小。
3. 计算样本的适应度值,并根据适应度值对样本进行排序。
4. 根据适应度值对样本进行加权平均,得到新的均值向量。
5. 计算样本集合的协方差矩阵,并进行矩阵分解得到特征向量和特征值。
6. 根据特征向量和特征值调整协方差矩阵的大小和方向。
7. 重复步骤2-6,直到达到停止条件(如达到最大迭代次数或目标函数值收敛)。
CMA均衡算法的优点是可以自适应地调整搜索空间,避免了手动调参的困扰,并且适用于高维优化问题和非线性问题。
然而,CMA均衡算法在计算量和收敛速度方面相对较慢,对于有噪声的优化问题也不太适用。
基于正交小波变换的变步长盲均衡算法研究

基于正交小波变换的变步长盲均衡算法研究韩迎鸽;郭业才;杨韬【期刊名称】《电视技术》【年(卷),期】2011(35)13【摘要】针对常数模算法(CMA)剩余误差大与收敛速度慢的问题,将变步长思想和正交小波变换引入到常数模盲均衡算法中,提出了基于正交小波变换的指数型变步长常数模盲均衡算法(WT-VCMA).水声信道仿真结果表明:与基于剩余误差的指数型变步长常数模盲均衡算法(VCMA)及常规常数模算法(CMA)相比,新算法具有更快的收敛速度和更小的剩余误差.%Aiming at the slow convergence rates and the big residua error of Constant Modulus Algorithm (CMA), a new orthogonal Wavelet Transform based Variable step-size Constant Modulus blind equalization Algorithm (WT-VCMA) is proposed. In the proposed algorithm, the variable step-size ideas and the orthogonal wavelet transform are introduced into the WT-VCMA. Simulation results with underwater acoustic channel indicate that the proposed algorithm has not only the faster convergence rates but also the less residua error which compared with those of CMA and VCMA.【总页数】4页(P89-91,109)【作者】韩迎鸽;郭业才;杨韬【作者单位】安徽理工大学电气工程系,安徽淮南232001;安徽理工大学电气工程系,安徽淮南232001南京信息工程大学,江苏南京210044;安徽理工大学电气工程系,安徽淮南232001【正文语种】中文【中图分类】TN911【相关文献】1.基于归一化误差函数的变步长分数间隔盲均衡算法研究 [J], 张艳萍;赵顺生;杨彦红2.基于变步长的分数间隔盲均衡算法研究 [J], 张建军;江漫3.一种基于CMA的变步长盲均衡算法研究 [J], 李茹;张涛;朱秋煜4.基于正交小波变换的变步长盲均衡算法 [J], 孙雅琴;韩迎鸽;杨超5.基于联合误差控制的变步长双模盲均衡算法研究 [J], 李世平;王爱红;王隆;单凤丽因版权原因,仅展示原文概要,查看原文内容请购买。
基于分数间隔均衡器的CMA_DD双模式切换算法研究
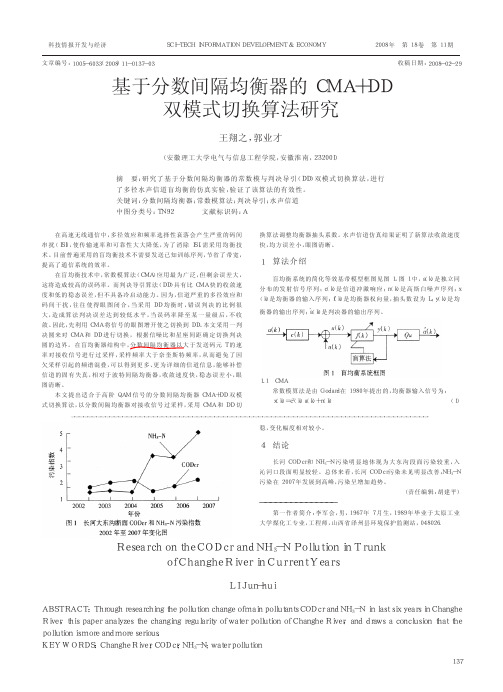
图1盲均衡系统框图!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!科技情报开发与经济SCI-TECHINFORMATIONDEVELOPMENT&ECONOMY2008年第18卷第11期稳,变化幅度相对较小。
4结论长河CODcr和NH3-N污染明显地体现为大东沟段面污染较重,入沁河口段面明显较轻。
总体来看,长河CODcr污染未见明显改善,NH3-N污染在2007年发展到高峰,污染呈增加趋势。
(责任编辑:胡建平)───────────────第一作者简介:李军会,男,1967年7月生,1989年毕业于太原工业大学煤化工专业,工程师,山西省泽州县环境保护监测站,048026.图1长河大东沟断面CODcr和NH3-N污染指数2002年至2007年变化图ResearchontheCODcrandNH3-NPollutioninTrunkofChangheRiverinCurrentYearsLIJun-huiABSTRACT:ThroughresearchingthepollutionchangeofmainpollutantsCODcrandNH3-NinlastsixyearsinChangheRiver,thispaperanalyzesthechangingregularityofwaterpollutionofChangheRiver,anddrawsaconclusionthatthepollutionismoreandmoreserious.KEYWORDS:ChangheRiver;CODcr;NH3-N;waterpollution年份在高速无线通信中,多径效应和频率选择性衰落会产生严重的码间串扰(ISI),使传输速率和可靠性大大降低,为了消除ISI,需采用均衡技术。
目前普遍采用的盲均衡技术不需要发送已知训练序列,节省了带宽,提高了通信系统的效率。
在盲均衡技术中,常数模算法(CMA)应用最为广泛,但剩余误差大,这将造成较高的误码率。
基于误差信号非线性函数的变步长常模盲均衡算法

基于误差信号非线性函数的变步长常模盲均衡算法张满毅【摘要】将时变步长思想引入常模盲均衡算法(CMA),利用剩余误差的一种非线性函数作为步长控制因子自适应地改变步长大小,提出一种新的常模改进算法.并分析了参数α和β的选取原则.理论分析和仿真实验均表明该算法与传统常模算法相比,加快了收敛速度,减小了稳态剩余误差.【期刊名称】《山西电子技术》【年(卷),期】2015(000)004【总页数】3页(P56-58)【关键词】盲均衡;误差信号;变步长;常模算法【作者】张满毅【作者单位】中国移动通信集团山西有限公司朔州分公司,山西朔州036002【正文语种】中文【中图分类】TP20在现代数字通信系统中,由于传输信道的不理想,产生了码间串扰,降低了通信质量。
目前,消除码间串扰的主要方法是采用自适应均衡技术和盲均衡技术。
是一种不需要发送训练信号、而利用接收信号自身的先验信息来进行通信信道的均衡、使信道输出的信号尽量逼近发送信号的新兴自适应均衡技术。
在现有的各类盲均衡算法中,由于Godard[1]和 Triechler[2]提出的经典常模盲均衡算法具有运算复杂度低、容易实时实现等特点,在目前宽带通信系统中得到了广泛的应用。
其系统的简化模型如图1所示[3]。
图1 盲均衡原理框图图1中,x(n)为通信系统的发送信号;h(n)为离散时间传输信道的冲激响应;n(n)为传输信道上迭加的噪声;y(n)为经过信道传输后的系统接收信号,同时它也是盲均衡器的输入信号为经过盲均衡器后的输出信号;^x(n)为判决后的恢复信号。
盲均衡器一般采用长度为N的截断型横向滤波器,其抽头系数矢量为 W(n)=[w1(n),w2(n),…,wN(n)]T。
根据图1所示的盲均衡原理框图及信号传输理论,可知盲均衡器的输出信号为:常模盲均衡算法中,抽头系数的迭代公式为:式中,μ为迭代步长因子,一般取非常小的常数。
常模盲均衡算法中,迭代步长因子一般采用固定值,步长因子小,盲均衡算法收敛后的稳态剩余误差就小,误码率也就小,但算法的收敛速度也就慢。
基于CMA算法的双模式盲均衡算法

基于CMA算法的双模式盲均衡算法
徐金标;葛建华
【期刊名称】《通信学报》
【年(卷),期】1997(018)002
【摘要】常数模算法的收敛速度非常缓慢。
加了加快收敛过程,一旦误码率降低到足够低,该算法必须切换到DD算法。
为了克服这些缺点,本文利用QAM领事分布在几个已知半长的圆上的特点,提出了两类多模盲均衡算法。
在此基础上又提出一种双模式均衡方案:林模算法模式和常数模算法模式。
【总页数】5页(P65-69)
【作者】徐金标;葛建华
【作者单位】西安电子科技大学;西安电子科技大学
【正文语种】中文
【中图分类】TN911.5
【相关文献】
1.用于MQAM调制的双模式Sign-CMA盲均衡算法 [J], 郑应强;李平;张振仁
2.基于NCMA算法的递归步长多模盲均衡算法 [J], 刘宁;王英民
3.一种新的基于CMA算法的递归步长盲均衡算法 [J], 欧阳喜;葛临东
4.一种基于CMA和DDLMS算法的双模式盲均衡算法 [J], 胡婉如;梅如如;崔健;王竹刚
5.基于Dual-Mode MCMA+DD双模式盲均衡算法研究 [J], 郭元术;岳蕾;姚博彬
因版权原因,仅展示原文概要,查看原文内容请购买。
MIMO快速恒模均衡算法研究
MIMO快速恒模均衡算法的研究张琛鄷广增(南京邮电大学通信与信息工程学院,江苏南京 210003)摘要:恒模算法CMA是一种重要的盲均衡自适应算法,但其性能取决于快速收敛的自适应算法。
本文研究的一种批处理的恒模算法通过优化搜索方向,步长,初值等方面的影响,达到快速收敛的目的。
关键词:恒模算法;批处理;步长;初始值The Study on A Fase Blind Adaptive Algorithm CMA In MIMOSystemZhang chen ,FENG Guang-zeng(Communication and Information Engineering Institute Nanjing University of Posts & Telecommunications,Nanjing Jiangsu 210003, China)Abstract: CMA is an important blind equalization algorithm, but the realization of its best performance for CMA depends on fast effective convergence algorithm. This paper investigates a fast effective convergence CM algorithm named BPCMA [1]which optimizes the effects of the step size, the initial value, and the search direction。
Key words: CMA; Batch Processing; step size; initial value1 引言传统的自适应均衡技术需要插入一些时段(时变系统中要周期性重现)的训练序列,接收机按迫零原理或最小均方误差准则调整横向滤波器抽头系数,使得整个传送系统(含信道和均衡器)输出的符号与符号之间的干扰被消除。
《2024年盲均衡算法及其FPGA实现的研究》范文
《盲均衡算法及其FPGA实现的研究》篇一一、引言在现代通信系统中,信号传输的可靠性和效率至关重要。
然而,由于信道中的多径干扰、噪声以及其他因素的影响,接收到的信号往往会发生失真。
为了克服这些问题,盲均衡技术应运而生。
盲均衡算法能够在无需已知确切信道信息的情况下,通过接收到的信号本身进行均衡处理,从而恢复原始信号。
本文将重点研究盲均衡算法及其在FPGA(现场可编程门阵列)上的实现。
二、盲均衡算法概述盲均衡算法是一种自适应滤波技术,它利用接收到的信号统计特性进行信道均衡。
该算法无需发送训练序列或已知的信道状态信息,因此具有较高的灵活性和适应性。
目前,常见的盲均衡算法包括恒模算法(CMA)、最小均方误差算法(MMSE)等。
三、CMA盲均衡算法原理恒模算法(CMA)是一种常用的盲均衡算法,其基本思想是通过调整滤波器的系数,使得滤波器输出信号的模值恒定,从而达到均衡效果。
CMA算法具有计算复杂度低、易于实现等优点,因此在实际通信系统中得到了广泛应用。
四、FPGA实现盲均衡算法的优势FPGA作为一种可编程的硬件设备,具有并行处理能力强、可定制化程度高等优点。
将盲均衡算法在FPGA上实现,可以充分利用FPGA的硬件加速特性,提高算法的处理速度和效率。
此外,FPGA还具有较低的功耗和较高的稳定性,适用于各种复杂的通信环境。
五、FPGA实现CMA盲均衡算法的设计与实现在FPGA上实现CMA盲均衡算法,需要设计合适的硬件结构和算法流程。
首先,根据CMA算法的原理和FPGA的特点,设计滤波器的系数更新逻辑和数据处理流程。
其次,利用硬件描述语言(如Verilog或VHDL)编写代码,实现滤波器的硬件结构。
最后,通过仿真和测试验证设计的正确性和性能。
六、实验结果与分析通过在FPGA上实现CMA盲均衡算法,并进行实际通信环境的测试,可以得出以下结论:1. FPGA实现的CMA盲均衡算法具有较高的处理速度和效率,能够快速适应信道变化。
基于MIMO系统的MDCMA盲均衡算法
A o i e t e e i n e r r c n t n o u u m d f d d h r d sg r o o s a t m d l s i i a g r t m o I O y t m s l o ih f rM M s se
J i ID ,MA i h Hu. u,L n z IMig
s# er r ln i ro ;b i d ̄u c r e ̄p r f n aa o i
0 引言
多输人多输出( I0 系统中, MM ) 如何分离不 同的 源信 号 以及如 何 补偿 接收 信号 畸变是 目前 的研究 热 点 。盲均 衡可 以抑制 II码 间 干扰 ) M I多 用 户 S( 和 U( 干扰 )补 偿 信 号 畸 变 。 而 且 盲 均 衡 不 需 要 训 练 序 , 列, 相对 于 自适 应 均 衡技 术 , 加 节省 资 源 , 而 提 更 从 高 了频 谱利 用率 。 目前 , 各 种 盲 算 法 中应 用 最 广 泛 的 是 G d ̄ 在 oa 提 出的恒 模算 法 ( M ) 】 C A n。但是 恒 模算 法 直 接 用 到
维普资讯
2 0 年第7 08 期
中图分类号 :N 1 T91 文献标识码 : A 文章 编号 :09—25 (0 8o —03 —0 10 52 2o )7 05 2
基 于 MI 系统 的 MD MA盲 均 衡 算 法 MO C
改进CMA盲均衡算法的研究与分析
( .C mp n fP s rd aeM a a e n ,t eAc d myo up n o 1 o a y o o t a u t n g me t h a e f g Eq ime t mma d & Te h o o y e ig 1 1 1 ,C ia C n c n l g ,B in 0 4 6 hn ; j
维普资讯
20 0 6年
1 2月
装 备 指 挥 技 术 学 院 学 报
J u n lo h a e fEq ime tC mma d & Te h oo y o r a fteAc d my o up n o n c n lg
De e e c mb r
中图分 类号 : 1 TN 9 1 文 献标 识码 :A
St d n ay i o d f d Bl d Eq a a i n Al o i m fCMA u y a d An lss f ra Mo i e u l t g r h o i i n i o z t
3 e igAe o p c n rl e te e ig 1 2 0 C ia .B in r s a eCo t n r ,B i n 0 2 6, h n ) j oC j
A sr c :Atp e e t o sa tm o u u lo ih ( bt t a r s n ,c n tn d l sag rt m CM A) i wi ey u e s d l s d,b ti h sd s d a t— u t a ia v n a g st a h o v r e c p e sso a dt ersd a r o a g . I r e o s e d u h o v r e h tt ec n eg n es e d i lw n h e i u l r ri lr e n o d rt p e pt ec n e — e s g n ep o e s hsag rt m a es th o e oad cso - ie td e u l ai nag rt m n et e e c r c s ,t i lo i h m yb wi v rt eiin dr c e q ai t l o ih o c h c z o er rlv l sr a o a l w.S o i e lo ih i p o o e a e n t eCM A. B t h o ei ro e e e s n b yl i o o am df dag rt m s r p s db s d o h i y ist e r t— c la ay i ,i i s o e h ti h st ec a a t rsiso a tc n e g n es e da ds l rsd a l a n lss t s h w d t a t a h h r ce itc ffs o v r e c p e n ma l e iu l " e r r ti r v d t a h df d ag rt m sv l ysmu ai g t et l o ih sn a lb o .I sp o e h tt emo i e l o i i h i ai b i lt h wo ag rt ms u ig M ta . d n
基于数据重用思想的CMA盲均衡算法

1 引言
近年来 , 短突发信号在短波 、 超短波及卫星等通信系统 中获 得了越 来越多的应用 。 尤其在军事通信领域 , 由于短突发信号的 随机性和短暂性有利于它在时域上避开敌方的干扰和截获 , 从 而越来越多的用于战术通信 中。 对于短突发信号的接收 , 要求接 收方在相当短的时间内完成信号 的均衡 、 同步等算法 , 尤 p o o e l d e u l a o lo i m s u f l fr s o u s sg a . e n t e t a h r p s d b i q ai t n a g r h i s u o h r b r t in 1 a n zi t e t
LI U S i g n GE Li d n . n e u l a o u i g a a— e i g h — a g. n— o gBR d q a i t n sn d t r u n CM A — a e a g rt m. m p t r zi s b s d lo i h Co u e En i e rn a d gn e ig n
2 算法描 述
基本 的 C MA盲均衡算法描述如下 :
W( + )w ( )“ ( ) ( ) n 1= n 十e n n
e
() 1 () 2
( )( —W n X( ) ) ( ) n n = A I ( ) n l W n ( )
其 中, n 1为 n l时刻 滤波器 的权系数 向量 , n 为 n时 W( + ) + w( ) 刻滤波器 的权系数 向量 , 自适应 步长 ,( ) n时刻 的误 为 en为 差 函数 , () n x n为 时刻的输入样本 向量 , 表示共轭 , 由信 A是 源序列确定的实常数 。 基于数据重用思想的 C A盲均衡算法描述如下 : 设接收 M 假 数据样本 ( ) n 的长度为 , 并且这 个数据样本几乎包含了信 道可能的输 出状态 ,即意味着这 个数据样本包含了所有的信 道信息 。 对于缓变的信道 , 这种假 设是成立的。 因此仅利用这 个 数据样本进行信道 均衡是可能的。为方便描述 , 的 C A 基本 M 为符号间隔均衡器。 初始迭代时 , ( ) : 1= 0 + ( ) 由式 1得 w( ) w() 0
基于对角递归神经网络盲均衡算法的研究

( 5)
传递函数。
3 基于对角递归神经网络盲均衡算法
选取传递函数为双曲正切函数 , 即
f ( x) = x + α
2μ [| � x ( n) |
o j h ij
2
- R2 ] | � x ( n) | f ′ [ v( n) ] × ( 6)
第 37 卷 专辑 2006 年 5 月
3
太
原
理
工
大
学
学
报
JOURNAL OF TAI YUAN UNIVERSIT Y OF TEC HNOLOGY
Vol. 37
Spec. Issue
Ma y 2006
文章编号 :100729432 ( 2006) S120033203
基于对角递 归神经网络盲均衡算法的研究
盲均衡技术是一种新兴的自适应均衡技术 , 它 能够不借助于训练序列 , 仅利用接收序列本身的先 验信息来均衡信道特性 , 使其输出序列尽量接近发 送序列 , 能有效地补偿信道的非理想特性 , 克服码间 干扰 ,减少误码率 , 提高通信质量 , 在通信等领域有 着极其重要的应用价值 [ 1 ] 。 笔者利用对角递归神经网络结合传统盲均衡恒 模 ( CM A) 算法 , 提出了一种新的简单有效的算法 , 克服了原有算法的缺陷 。
因此得到能够不借助于训练序列仅利用接收序列本身的先验信息来均衡信道特性使其输出序列尽量接近发送序列能有效地补偿信道的非理想特性克服码间干扰减少误码率提高通信质量在通信等领域有着极其重要的应用价值笔者利用对角递归神经网络结合传统盲均衡恒cma算法提出了一种新的简单有效的算法对角递归神经网络的结构对角递归神经网络的结构如图基于神经网络盲均衡的原理基于神经网络盲均衡算法的基本原理如图隐层的输入为uj输出层的输入为则对角递归神经网络的状态方程为2005212229基金项目20051038作者简介在读硕士山西阳泉人讲师研究方向为信号及信息处理tel13327436289通讯联系人
仿射投影数据重用MCMA盲均衡

号盲均衡 的需要 ; 文献 [ , ] 4 5 分别利用倒三谱和三 阶累积量等高阶统计量设计的盲均衡算法 , 大大减
少了算法的收敛时间 , 多数情况下仍需几百甚至 但 上千个信号样本才能收敛 , 且算法需要估计接收信
号样 点 的 四阶累 积量 和 三 阶 累 积量 , 算 复杂 度 太 计
Ab t a t o e l d e u l ai n ag r h wi a i o v r e c ae i p o o e o r c ie t e b rtmo e sr c :A n v lb i q ai t l o t m t r p d c n e g n e r t s r p s d t e e v h u s— d n z o i h
摘
要: 针对 突发信号的盲接收 , 出一种快速收敛 的盲均衡算法 . 提 该算法将 自适应滤波领域 中的仿射投影和数据
重用思想 引入修 正常模算 法( C A 盲均衡器. MM ) 与传统 的 M M C A算法相 比, 大大提高 了算法 的收敛速率 , 于突 适用 发信号 的盲均衡 . 在数值模拟 中 , 与传统 的 MC A算 法在收敛速率 、 态误差等方面进行 了对 比分析. M 稳
s n 1 h e f fn r et nad dt— u i dpieft n e s p l d t tem d e o s n i a.T ei ao a iepo c o n a r s gi a a t l r gf l i a pi o h o i dcnt t g d f j i ae n n v ie i i d e i f a
第2 6卷
第 6期
简化的RLS-CMA 盲均衡_水声信道常数模盲均衡:理论、算法与仿真_[共2页]
![简化的RLS-CMA 盲均衡_水声信道常数模盲均衡:理论、算法与仿真_[共2页]](https://img.taocdn.com/s3/m/abc03022f61fb7360b4c65db.png)
水声信道常数模盲均衡:理论、算法与仿真52 2.4.3 简化的RLS-CMA 盲均衡RLS-CMA 盲均衡以较大的计算复杂度可以获得更好的均衡性能,在对时变水声通信信道跟踪上具有实际应用价值。
为了进一步减小RLS-CMA 盲均衡的计算复杂度,可以考虑简化自相关矩阵的逆矩阵()n P 的递推迭代求解过程,以降低RLS-CMA 盲均衡的计算复杂度。
在()n P 的计算中,只取其主对角线上的元素参与迭代,而忽略矩阵中其他的元素。
这种近似仍然能够在一定程度上保留RLS-CMA 的快速收敛特性,另外可以推导证明,这种近似的特殊形式就是归一化LMS- CMA 。
根据这一思想,可以得到简化RLS-CMA 盲均衡的迭代公式,见表2-3。
表2-3 简化RLS-CMA 盲均衡实现流程初始化:均衡器权系数(0)w 中心系数抽头初始化,1(0)δ−=P I ,其中,δ为一个很小的正数,I 为b b L L ×单位阵,b L 为线性均衡器的阶数。
迭代过程:对于1,2,n ="计算()*H ()()(1)()u n y n w n y n =− H ()(1)()CM e n R w n un =−− H [(1)]()()()[(1)]()n u n n u n n u n λΛ−=+Λ− ,P k P λ为遗忘因子 H 1()[(1)]()()[(1)]n n n u n n λ⎡⎤=Λ−−Λ−⎣⎦ P P k P *()(1)()()w n w n n e n =−+k其中,[]Λ⋅表示取矩阵的主对角元素运算。
经过这一简化,将增益矢量()n k 和自相关矩阵的逆矩阵的递推计算由矩阵相乘简化成为了向量相乘,使得计算复杂度由2()O N 简化为()O N 。
【仿真分析】 仿真信道采用典型电话信道模型,其信道等效基带冲激响应为 [0.04,0.05,0.07,0.21,0.5,0.72,0.36,0,0.21,0.03,0.07]=---h (2-101) 发射信号采用等概率二进制序列生成,采用QPSK 调制方式,信道噪声为加性高斯白噪声,信噪比30SNR =dB 。
CMA盲均衡算法研究
CMA盲均衡算法研究1.盲均衡概述1.1 均衡器分类均衡是通信系统中的一项重要技术,不仅应用于模拟通信,也应用于数字通信。
在数字通信中,由于信道的特性变化,会造成码间干扰。
通过均衡,可以补偿信道特性的变化,减小或消除码间干扰。
均衡通常在接收机完成。
均衡器分为两种方式,一是频域均衡,二是时域均衡。
频域均衡是使整个系统的频率传递函数满足无失真传递的条件。
时域均衡是直接从时间响应出发,使整个系统的冲激响应满足无码间干扰的条件。
频域均衡的条件是比较严格的,而满足奈奎斯特整形定理的要求,即仅仅在判决点满足无码间干扰的条件相对宽松一些。
所以在数字通信中,一般采用时域均衡。
时域均衡器分为两大类,一是线性均衡器,二是非线性均衡器。
图1.1表示了均衡器的分类框图。
图1.1 均衡器的结构分类1.2 盲均衡技术尽管理论上存在理想的基带传输特性,但是在实际应用由于中无线信道的时变特性,在抽样时刻上总是存在一定的码间干扰,从而导致系统性能的下降,误码率显著增大。
理论和实践都表明,在基带系统中插入一种滤波器能减少码间干扰的影响。
这种起补偿作用的滤波器统称为均衡器。
在实际应用中有许多问题不能用固定系数的均衡器解决,因为我们没有充足的信息去设计固定系数的数字滤波器,或设计规则会在滤波器正常运行时改变。
绝大多数这些应用都可以用特殊的智能滤波器,即常说的自适应滤波器来成功解决。
自适应滤波器显著特征是:它在工作过程中不需要用户的干预就能改变响应,进而改善性能。
系数可变的自适应均衡器可以分为两类:基于导频的估计方法和盲估计方法。
第一种方法利用数据序列中的已知数据(可以是离散的或连续的)得到导频位置处的信道响应,然后利用有关内差算法得到整个频域信道的响应,这种方法简单,运算量小,但需要发送已知的导频信息,降低了系统效率。
而盲估计和跟踪方法利用了接收数据的统计特性来实现信道的估计和跟踪,如利用子空间分解算法等,相对于基于导频的估计和跟踪算法,盲算法提高了系统效率,但极大地增加了运算量。
频选信道CMA频域盲估计与均衡的开题报告
频选信道CMA频域盲估计与均衡的开题报告一、研究背景在多天线无线通信系统中,由于信道的复杂性和干扰的存在,会对信号传输造成影响,使接收信号受到损失、失真和干扰。
为解决这些问题,人们引入信道均衡技术,即信号传输过程中,对受到干扰的信号进行修正和矫正,使其符合预期的信号特性,从而提高接收数据的可靠性和准确性。
常用的均衡方法有线性均衡、最小均方误差等,但这些方法均需要准确的信道状态信息,而如何准确地估计信道状态信息则成为一项重要的研究方向。
频域盲估计技术是一种无需先验信息的信道估计方法,可以消除频率偏移和多普勒效应,提高系统性能,因此成为研究热点。
二、研究内容本文将以频域盲估计技术为主要研究内容,针对频域盲估计在信道均衡中的应用进行研究。
具体研究内容主要包括以下几点:1. 了解频域盲估计原理及相关算法对频域盲估计原理、常用算法如CMA、DFE等进行研究,比较其优缺点,为后续研究提供基础。
2. 设计基于CMA的频域盲估计均衡系统本文将以CMA为例,设计基于CMA的频域盲估计均衡系统,并进行仿真实验来验证其性能。
3. 对比频域盲估计与其他估计方法的性能差异将频域盲估计与传统的基于先验信息的均衡方法如ZF、MMSE等进行对比,评价其性能差异,分析其优劣。
4. 分析频域盲估计方法在实际系统中的应用本文将对频域盲估计方法在实际系统中的应用进行探讨,并对其应用场景、条件等进行分析。
三、研究意义本文将探讨频域盲估计在无线通信系统中的应用,相比于传统的方法,该技术无需获取先验信息,简化了均衡过程,同时提高了系统性能,具有较大的实用价值。
因此,该研究具有以下意义:1. 增强理论知识通过研究频域盲估计和其他均衡方法的原理和算法,能够深入理解均衡技术,并为信号处理领域的进一步研究提供理论基础。
2. 提高系统性能本文将设计基于CMA的频域盲估计均衡系统,并对其性能进行仿真实验,可以为实际通信系统的性能提升提供参考,具有一定的应用价值。
加入判决引导的恒模均衡算法优化
加入判决引导的恒模均衡算法优化梅凡;邓元策;王竹刚【摘要】Multipath propagation and bandwidth limitation bring the Inter-Symbol Interface(ISI) during signal transmission through of wireless channel. Constant Modulus Algorithm(CMA) is the mostly used blind equalization method. This paper proposed an optimized CMA method which introduces Decision-directed error and variable step size, in order to provide faster convergence and smaller steady state error compared with traditional CMA. Simulation experiments prove the performance of the proposed algorithm, performance show that it is easier to be fulfilled with hardware.%多径传输和带宽的限制使得无线信道的传输存在码间串扰(ISI)。
恒模均衡算法(CMA)是最常用的自适应盲均衡技术。
针对CMA收敛较慢和收敛之后稳态误差较大的问题,利用最小均方误差(MSE)引入判决引导误差,同时也引入了变步长。
仿真实验表明该算法对比CMA而言能够提高收敛速度,稳态误差更小,同时易于硬件实现。
【期刊名称】《电子设计工程》【年(卷),期】2016(024)023【总页数】4页(P143-145,156)【关键词】恒模均衡;判决引导;变步长;最小均方误差【作者】梅凡;邓元策;王竹刚【作者单位】中国科学院国家空间中心北京100190; 中国科学院大学北京100190;中国科学院大学北京100190;中国科学院国家空间中心北京100190【正文语种】中文【中图分类】TN911.5无线通信中,信道环境的复杂多变使得信号通过多条路径到达接收端,因此带来了多径干扰。
一种联合均衡和多用户检测的SDCMA盲算法

子空 间的 MMS ( E 最小均方误差) 盲检测算法进 行比较 。仿真结果表明 ,这两种 S C D MA算 法的 B R 误 比特率) 能 E( 性
均优于子空 间法 ,而且联 合均衡 和多用户检测的 S C D MA 盲算法利用 同时对均衡权值 向量和 多用户检测器 向量 进
行 自适应更新 ,能较大程度地 改善系统性 能,是这 3种盲算法中性能最佳的一个。
S C c e saebt u eir ota f h u saebsdsh me adtejitS MA shme whc ks D MA sh me r ohsp r hto esbp c-ae c e , n h n DC c e , i t e ot t o ha
a v n a e o n wi g t e e u l a i n we g t e t ra d t e mu t s rd t co e t r t h a i , ra l d a t g fr e n h q a i t ih c o n h l u e e e t r co es metme g e t i r v s e z o v i v at y mp o e s se p ro ma c n s h e t ft et r es h me . y t m e f r n ea d i t eb s h e c e s o h Ke r s M C . ywo d DS CDM A, DCM A, q a ia i n M utu e e e t n S E ul t , z o l s r tci i d o
dtcinS C loi m. h w DC c e e n u saebsdM ii m Me nS u rdE rr( eet D MA a r h T et o S MA sh m sad sbpc-ae nmu a -q a ro MMS ) o g t e E dtcina o ae ntep p  ̄T es l inrsl hw ta BtErrR t B R efr n e o et o eet r c mprd i h a e h i a o eut so h t i r a o e mu t s o e( E )pr mac s f h w o t
盲均衡CMA盲均衡算法仿真研究毕业论文
( 此文档为word 格式,下载后您可任意编辑修改!)CMA 盲均衡算法仿真研究摘要盲均衡是一种新兴的自适应均衡技术,它不需要参考输入的训练序列来维持正常工作,仅依据接收序列本身的先验信息来均衡信道特性。
自它出现后,就得到广泛的关注,并在许多领域中得到应用。
本文系统地分析研究和归纳总结了盲均衡的基本理论。
重点分析了Bussgang类盲均衡算法中的恒模(CMA, Constant Modulus Algorithm )盲均衡算法。
分析了传统CMA盲均衡算法的收敛性能,由于采用固定步长,使得收敛速度和收敛精度之间相互制约,其应用受到很大的限制。
为了解决这一矛盾,本文提出了一种基于均方误差(MSE, Mean Square Error)的CMA盲均衡算法,这是一种利用时变步长来代替固定步长的自适应变步长CMA盲均衡算法,并进行了计算机仿真。
结果表明改进算法相对于CMA算法收敛性能有一定的提高。
关键字:盲均衡,恒模算法, 变步长,均方误差CMA BLIND EQUALIZATION ALGORITHM SIMULATIONABSTRACTThis paper analyzed systematically studies and summaried the blind balanced elementary theory. Analysis focused on the Bussgang type blind equalization of constant modulus algorithm (CMA, Constant Modulus Algorithm) algorithm for blind equalization. This paper analyzes of the traditional CMA blind equalization algorithm performance, as a result of the use of fixed-step, making convergence speed and residual error become a contradiction, which makes the application fields of CMA algorithm limited. In order to solve thecontradiction ,this paper derives an improved CMA blind equalization algorithm utilizing the vary of MSE. This is an adaptive variable step-size CMA blind equalization algorithm, which uses a time-varying step size to replace the fixed step size. The simulation with computer shows the improved algorithms CMA algorithm.KEYWORDS: blind equalization , Constant Modulus Algorithm , variable step-size, Mean Square Error目录摘要(中文)................................................................... I...摘要(外文).. (II)1绪论 (1)1.1研究盲均衡的目的和意义 (1)1.2盲均衡的研究现状 (2)1.3衡量算法收敛性能的指标 (3)2恒模算法 (4)2.1盲均衡的基本结构 (4)2.2Bussgang类盲均衡算法 (6)2.2.1决策指向算法 (7)2.2.2 Sato 算法 (7)2.2.3 Godard 算法 (8)2.3恒模算法的提出 (8)2.4恒模算法的理论推导 (9)2.5步长因子对恒模算法收敛性能的影响 (11)3基于剩余误差的变步长恒模盲均衡算法 (17)3.1恒模算法中剩余误差的分析 (17)3.2基于MSE的变步长恒模盲均衡算法 (18)3.2.1基于MSE的变步长恒模盲均衡算法的表达形式 (18)3.2.2算法性能分析 (18)3.3基于MSE的变步长恒模算法的MATLAB实现 (19)结论 (24)参考文献 (25)附录 (26)致谢 (32)1 绪论盲均衡是一种新兴的自适应均衡技术,它不需要参考输入的训练序列来维持正常工作,仅依据接收序列本身的先验信息来均衡信道特性。
基于GNURadio的CMA盲均衡器和锁相环组合设计与实现
基于GNURadio的CMA盲均衡器和锁相环组合设计与实现李晓光;潘克刚【摘要】在分析Bussgang类恒模算法(Constant Modulus Algorithm,CMA)盲均衡基础上,使用改进型CMA结合二阶锁相环(PLL)的盲均衡方法,实现对MQAM(M=4,16,64)和MPSK(M=2,4,8)信号经过高斯噪声信道后发生的频率偏移和相位偏移的消除.组建了基于GNURadio和USRP软件无线电平台的CMA+PLL 盲均衡处理模块.通过对MQAM和MPSK信号的测试,模块在噪声影响下对信号频率和相位偏移依然有良好的纠正性能,为使用软件无线电平台实时接收处理信号做好模块化验证.【期刊名称】《微型机与应用》【年(卷),期】2018(037)007【总页数】4页(P67-70)【关键词】盲均衡常模算法;二阶锁相环;GNURadio;USRP【作者】李晓光;潘克刚【作者单位】中国人民解放军陆军工程大学通信工程学院,江苏南京210007;中国人民解放军陆军工程大学通信工程学院,江苏南京210007【正文语种】中文【中图分类】TN919.3+40 引言在通信系统中不理想的信道会对信号造成畸变,其中非常普遍的畸变就是信道间干扰和码间干扰,会使信号的频率发生频移和相位发生偏转,降低数据传输的可靠性。
为此,常在接收端采用适当补偿的方式解决畸变问题。
Bussgang类盲均衡算法是以一种迭代方式进行盲均衡,缺点是算法收敛时间长,收敛后稳态剩余误差大[1]。
Godard最早提出恒模算法(Constant Modulus Algorithm,CMA),它是Bussgang类盲均衡算法中最常用的一种[2-3]。
郭晓宇、赵宝峰等对恒模盲均衡算法进行了改进[4-5]。
童本锋设计了基于锁相环的CMA盲均衡器[6],解决了信号幅度变化和相位偏移补偿的问题。
改进型CMA盲均衡器可以对信号幅度做均衡,其性能优于常规CMA,二阶PLL可以对频偏和相位旋转进行补偿,其性能优于一阶锁相环,而两者结合可以提高收敛速度,减少稳态误差,可以用于实时信号的畸变处理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CMA盲均衡算法研究1.盲均衡概述1.1 均衡器分类均衡是通信系统中的一项重要技术,不仅应用于模拟通信,也应用于数字通信。
在数字通信中,由于信道的特性变化,会造成码间干扰。
通过均衡,可以补偿信道特性的变化,减小或消除码间干扰。
均衡通常在接收机完成。
均衡器分为两种方式,一是频域均衡,二是时域均衡。
频域均衡是使整个系统的频率传递函数满足无失真传递的条件。
时域均衡是直接从时间响应出发,使整个系统的冲激响应满足无码间干扰的条件。
频域均衡的条件是比较严格的,而满足奈奎斯特整形定理的要求,即仅仅在判决点满足无码间干扰的条件相对宽松一些。
所以在数字通信中,一般采用时域均衡。
时域均衡器分为两大类,一是线性均衡器,二是非线性均衡器。
图1.1表示了均衡器的分类框图。
图1.1 均衡器的结构分类1.2 盲均衡技术尽管理论上存在理想的基带传输特性,但是在实际应用由于中无线信道的时变特性,在抽样时刻上总是存在一定的码间干扰,从而导致系统性能的下降,误码率显著增大。
理论和实践都表明,在基带系统中插入一种滤波器能减少码间干扰的影响。
这种起补偿作用的滤波器统称为均衡器。
在实际应用中有许多问题不能用固定系数的均衡器解决,因为我们没有充足的信息去设计固定系数的数字滤波器,或设计规则会在滤波器正常运行时改变。
绝大多数这些应用都可以用特殊的智能滤波器,即常说的自适应滤波器来成功解决。
自适应滤波器显著特征是:它在工作过程中不需要用户的干预就能改变响应,进而改善性能。
系数可变的自适应均衡器可以分为两类:基于导频的估计方法和盲估计方法。
第一种方法利用数据序列中的已知数据(可以是离散的或连续的)得到导频位置处的信道响应,然后利用有关内差算法得到整个频域信道的响应,这种方法简单,运算量小,但需要发送已知的导频信息,降低了系统效率。
而盲估计和跟踪方法利用了接收数据的统计特性来实现信道的估计和跟踪,如利用子空间分解算法等,相对于基于导频的估计和跟踪算法,盲算法提高了系统效率,但极大地增加了运算量。
盲均衡是一种在信道畸变相当严重的条件下,不借助训练序列,仅根据接受到的信号序列本身对信道进行自适应均衡的方法。
与普通的均衡器相比,盲均衡具有收敛域大,应用范围广的特点。
1.3 盲均衡算法与分类1.3.1 盲均衡概述含有盲均衡功能的接收系统如图所示。
其中信道包括收发部分的滤波器以及空间传播媒体,其时变冲激响应序列{}n h 未知。
信道输出信号形式为:,2,1,0),()()()()(±±=+*=+-=∑∞-∞=n n n n s hn n k n s h n r nk k为了保证无噪信道输出()()n u n h s n =*方差不变,通常采用自动增益控制技术,使得21k k h ∞=-∞=∑。
令{}i w 为一个理想逆滤波器的冲激响应序列,他与信道冲激响应序列{}n h 之间满足逆关系,即n i n i i w h δ∞-=-∞=∑ 这样,在发射信号通过信道传输后,首先接入这个逆滤波器,其输出为(先不考虑噪声因素):()()()()i i l i l i i l l w r n i s n l w h s n l s n δ∞∞∞∞-=-∞=-∞=-∞=-∞-=-=-=∑∑∑∑。
在实际应用中,理想逆滤波器}{i w 通常采用长度为2L+1的有限抽头,这样滤波器输出为ˆ()()Li i Ly n w s n i =-=-∑ 这就是众所周知的用横向滤波器实现逆滤波器的形式。
由于逆滤波器截断,必然会带来残余码间干扰,进一步分析可知:()()()y n s n v n =+,其中ˆˆ()[()()](),0i i i i v n w n w n s n i w i L ∞=-∞=--=∀>∑ 称为卷积噪声,也就是残余码间干扰。
以此作为误差信号去调节逆滤波器就得到盲均衡器。
1.3.2 盲均衡算法分类考虑一个有2N+1抽头的线性均衡器如下图所示。
其中Nmin i i NZn Cy -=-=∑,式中m 和n 取整数,n y 为第NT 时刻均衡器的输出参数,mi C 为第m 次高速后第i 个抽头的增益系数,T 为发送端信号的符号周期。
算法的一般形式为10()m m i i n i n C C y f Z +-=-∂,这里0∂是迭代步长,f()是起误差控制的函数,其选取关系到算法的收敛性。
图1.2 整数抽头均衡盲均衡器Sato 提出的盲均衡算法表达式为().()n n n f Z Z r s i g n Z =-,其中2()/||n n r E a E a =; Godard 给出的盲均衡算法表达式为2()||(||)K Kn n n n K f Z Z Z ZR -=-,其中2||/||K k K n n R E a E a =;Serra 给出的盲均衡算法表达式为 ()||.().k n n n Knf Z Z s ig n Z R Z =-,其中12||/()K K n n R E a E a +=; Benvenisete-Goursat 提出的均衡算法表达式为12()||n n n n f Z K e K e e =+,其中n n n e Z a =-;以上各种算法的盲均衡器总的要求是快速跟踪信道的变化,快速收敛,且收敛以后的剩余误差要小。
2. CMA算法2.1 CMA算法的原理利用自适应滤波算法,合理的人工制造一个“期望响应”来代替缺失的“期望响应”。
其实,人工制造一个期望响应的思想,在非盲均衡器的应用中已经被采用,即训练序列,但训练序列只在初始系统训练阶段存在,一旦训练结束,训练序列不再存在,通信系统将传输用户的有用数据,期望响应也不再存在,自适应滤波器切换成一个固定系数滤波器,对于平稳信道来讲这样做是可以接受的,但对于性能不稳定的信道,接收机性能将会显著下降。
对原理加以改进,在训练序列传输结束后,通过人造一个期望响应,使得自适应滤波过程能够继续,以保证自适应均衡器跟踪信道的变换。
人造“期望响应”的方法是,在训练结束后,将均衡器输出送入判决器,判决器的输出作为期望响应,与滤波器输出相减构成误差量用于调整自适应均衡器系数。
由于判决器运算是一种非线性运算,因此训练结束后,利用人造期望响应的自适应均衡算法不再是线性自适应滤波器,而是非线性自适应滤波器。
下图表示了CMA盲均衡算法的框图。
图2.1 CMA盲均衡算法框图在通信系统中,角度调制是常用的调制形式,它包括频率调制(FM )和相位调制(PM ),这些调制信号满足包络是常数的性质,利用这个性质,构造一类盲自适应均衡算法,即CMA 算法。
传输信号满足恒模性,即22|()|s n R ,因为接收到的信号经过信道引起了畸变并且混入了干扰噪声,已不满足恒模性,当接收到的信号通过均衡器后,如果性能得到改善,误差函数会下降,理想的均衡器是误差函数下降到零。
定义使(y(n))最小,利用LMS 算法的基本思路,可以导出CAM 算法如下对于复信号和复系统,权更新算法为2.2 CMA 算法的MATLAB 程序实现先以4QAM 调制为例。
第一步:初始化。
取1000个数据,调制方式为4QAM ,从星座可知,其模为常数,步长为0.02,信道冲激响应随机生成,为复信道。
第二步:生成信道噪声。
第三步:通过CMA 均衡器处理。
第四步:计算SER 。
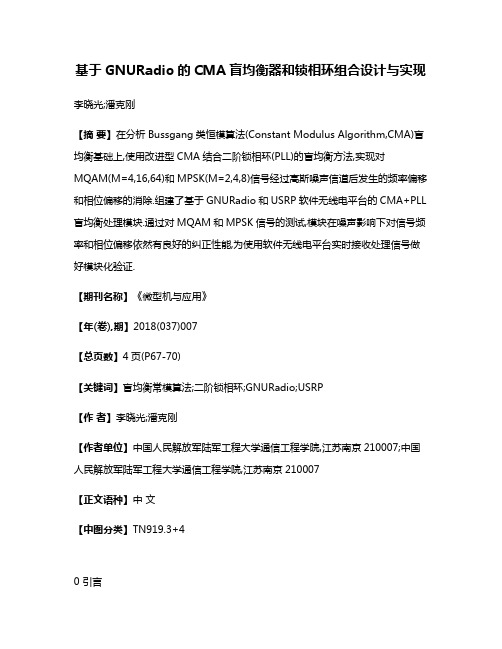
程序如下:% QAM的CMA算法实现% 初始化T=1000;dB_max=30;dB_inter=3;N=5;Lh=5;Ap=4;h=randn(Ap,Lh+1)+sqrt(-1)*randn(Ap,Lh+1); for i=1:Ap, h(i,:)=h(i,:)/norm(h(i,:));ends=round(rand(1,T))*2-1;s=s+sqrt(-1)*(round(rand(1,T))*2-1);SER=zeros(1,dB_max);for dB=0:dB_inter:dB_max% 产生信道噪声x=zeros(Ap,T);SNR=zeros(1,Ap);for i=1:Apx(i,:)=filter(h(i,:),1,s);vn=randn(1,T)+sqrt(-1)*randn(1,T);vn=vn/norm(vn)*10^(-dB/20)*norm(x(i,:));SNR(i)=20*log10(norm(x(i,:))/norm(vn));x(i,:)=x(i,:)+vn;end% CMA盲均衡器Lp=T-N;X=zeros((N+1)*Ap,Lp);for i=1:Lpfor j=1:ApX((j-1)*(N+1)+1:j*(N+1),i)=x(j, i+N:-1:i).';endende=zeros(1,Lp);f=zeros((N+1)*Ap,1); f(N*Ap/2+3)=1;R2=2;mu=0.001;for i=1:Lpe(i)=abs(f'*X(:,i))^2-R2;f=f-mu*2*e(i)*X(:,i)*X(:,i)'*f;endsb=f'*X;% 计算SERH=zeros((N+1)*Ap,N+Lh+1); temp=0;for j=1:Apfor i=1:N+1temp=temp+1;H(temp,i:i+Lh)=h(j,:);endendfh=f'*H;temp=0;temp=find(abs(fh)==max(abs(fh)));sb1=zeros(1,size(sb));sb1=sb./(fh(temp));sb1=sign(real(sb1))+sqrt(-1)*sign(imag(sb1));start=N+1-temp;sb2=sb1(10:length(sb1))-s(start+10:start+length(sb1)); SER(dB+1)=length(find(sb2~=0))/length(sb2) ;end% 画图if 1figure(1);subplot(221),plot(s,'o');grid,title('Transmitted symbols'); xlabel('Real'),ylabel('Image') axis([-2 2 -2 2])subplot(222),plot(x,'o');grid, title('Received samples'); xlabel('Real'), ylabel('Image')subplot(223),plot(sb,'o');grid, title('Equalized symbols'), xlabel('Real'), ylabel('Image') figure(2);plot(abs(e));grid, title('Convergence'), xlabel('n'), ylabel('Error e(n)')endfigure(3);i=0:dB_inter:dB_max;semilogy(i,SER(i+1),'gp-');grid;legend('SGDCMA');ylabel('误码率');xlabel('信噪比dB'); figure(4);subplot(221),h=reshape(h,1,(Ap*(Lh+1)));ii=1:(N+1)*Ap;stem(ii,h(ii));grid,title('channel impluse response');subplot(222),ii=1:(N+1)*Ap;stem(ii,f(ii));grid,title('equalization coefficience '); 生成的星座对比图如下:从这张对比图可以看出,当采用CMA盲均衡以后,盲均衡输出汇聚到四个星座点上,这样在判决的时候将极大提高判决准确率。