CQPS-E机构运动参数测试组合创新实验台说明书
《机构运动方案创新设计实验指导书-学生用-cxc》

《机构运动方案创新设计实验指导书-学生用-cxc》一、实验目的1.培养学生机构型综合的设计能力、创新能力和实践动手能力;2.培养学生综合应用所知识对机构的结构和运动性能加以评价的分析能力。
二、实验原理任何机构都是将基本组依次连接到机架和原动件上而构成的。
三、实验内容1.多功能移动式残病人浴缸翻转机构⑴上身部缸体翻转机构要求上身部缸体从水平位置向上翻转至70度,即翻转角为0-70度.可采用的机构:摆动导杆机构,导杆与上身部缸体固装在-起,带动缸体翻转。
由直线电机带动主动杆摆动。
双摇杆机构,上身部缸体作为从动摇杆,在主动摇杆驱动下作0-70度摆动.主动杆由直线电机带动摆动。
其它机构⑵腿部缸体翻转机构要求腿部缸体从垂直位置向上翻转至水平位置,利用死点保持腿部缸体在水平位置,借助凸轮机构破坏死点,使腿部缸体在重力作用下复位。
可采用机构:双摇杆机构,腿部缸体作为主动摇杆;其它机构2.牛头创床机构要求刨刀(安装在滑枕上)作直线往复运动。
可采用的机构:①转动导杆机构和曲柄滑块机构组合,由电机驱动主动件转动。
②摆动导杆机构和滑块机构组合,由电机驱动主动件转动。
③其它机构3.翻转机要求翻转模板装在连杆上,模板翻转180度。
①四杆机构,电机驱动。
②其它机构4.飞机起落架要求起落架上轮子从水平位置向下翻转至垂直位置,利用死点使起落架轮子保持在垂直位置。
可采用的机构:①四杆机构,电机驱动。
②其它机构5.插床机构要求插刀作垂直上下往复直线运动,向下时(工作行程)较慢,向上运动(空程)时速度较快。
可采用的机构:①双曲柄机构与曲构滑块机构组合,电机驱动。
②其它机构6.冲压成型机压头作垂直上下直线运动,以较小功率带动主动件运动时,滑块能产生巨大的冲压力。
可采用的机构:①六杆增力机构,电机驱动.②其它机构7.其他自选机构四、实验方法本搭接实验是在具有六根立柱的机架上完成的。
配有旋转电动机和直线电动机,以输出直线运动和旋转运动;配有齿轮、凸轮、带轮、槽轮等零件,通过搭接可完成直线、旋转、往复、间歇等运动传递;配有连杆、滑块座及连接零件,可搭接成各种执行机构。
[CQP-C] PC-C带传动试验台说明书 指导书 报告
![[CQP-C] PC-C带传动试验台说明书 指导书 报告](https://img.taocdn.com/s3/m/1bc9f1621eb91a37f1115c9f.png)
CQP—C带传动实验台使用说明书一、实验台用途本实验台是《机械设计》课程中带传动实验专用设备,其用途是:1. 观察带传动中的弹性滑动和打滑现象,以及它们与带传递载荷之间的关系。
2. 比较预紧力大小对带传动承栽能力的影响。
3. 比较分析平带、V带和圆带传动的承载能力。
4. 测定并绘制带传动的弹性滑动曲线和效率曲线,观察带传动弹性滑动和打滑的动画仿真,了解带传动所传递载荷与弹性滑差率及传动效率之间的关系。
5. 了解带传动实验台的构造和工作原理,掌握带传动转矩、转速的测量方法。
本实验台是在对CQP—C型带传动实验台进行改进设计后推出的新型多媒体可视化实验台,增加了V带与圆带传动,是本公司自主创新产品。
本实验台设计合理,能清晰地展示带传动原理;实验台直流电动机的无级变速、带轮转速的自动测量显示以及转炬的测量方法均先进、直观,操作简单,便于学生独立工作;学生还可在软件界面说明文件指导下,独立进行虚拟实验,有利于学生预习及复习;实验台结构简洁,体积小,重量轻,外形为工作台板十柜体落地式结构,移位灵活,便于实验室调整布置。
二、实验台结构及工作原理本实验台主要结构如图1所示。
1. 电动机移动底板2. 砝码及砝码架3. 力传感器4. 转矩力测杆5. 电动机6. 试验带7. 光电测速装置8. 发电机9. 负载灯泡组10. 机座11. 操纵面板图1 CQP-C带传动实验台主要结构图1. 试验带6装在主动带轮和从动带轮上。
主动带轮装在直流伺服电动机5的主轴前端,该电动机为特制的两端外壳由滚动轴承支承的直流伺服电动机,滚动轴承座固定在移动底板1上,整个电动机可相对两端滚动轴承座转动,移动底板1能相对机座10在水平方向滑移。
从动带轮装在发电机8的主轴前端,该发电机为特制的两端外壳由滚动轴承支承的直流伺服发电机,滚动轴承座固定在机座10上,整个发电机也可相对两端滚动轴承座转动。
2. 砝码及砝码架2通过尼龙绳与移动底板1相连,用于张紧试验带,增加或减少砝码,即可增大或减少试验带的初拉力。
机构运动创新实验指导书
实验四:机构运动创新设计实验指导书一、实验目的1、培养学生对机械系统运动方案的整体认识,加强学生的工程实践背景的训练,拓宽学生的知识面,培养学生的创新意识、综合设计及工程实践动手能力。
2、通过机构的拼接,在培养工程实践动手能力的同时,可以发现一些基本机构及机械设计中的典型问题,通过解决问题,可以对运动方案设计中的一些基本知识点融会贯通,对机构系统的运动特性有一个更全面的理解。
3、加深学生对平面机构的组成原理、结构组成的认识,了解平面机构组成及运动特性,进一步掌握机构运动方案构型的各种创新设计方法。
培养学生用实验方法构思、验证、确定机械运动方案的初步能力。
4、培养学生用电机、传感器、等控制测量元件组装动力源,对机械进行驱动和控制的能力。
二、实验的核心内容:使用“机构运动创新设计实验台”进行积木式组合调整,从而让学生自己构思创新、试凑选型机械设计方案,亲手按比例组装成实物模型,亲手安装电机及控制电路,模拟真实工况,动态演示观察机构的运动情况和传动性能,通过直观调整布局、连接方式及尺寸以及更改电路来验证和改进设计。
设计和组装融为一体,直到该模型机构灵活、可靠地按照设计要求运动到位,最终使学生用实验方法自行确定了切实可行,性能较优的机械设计方案和参数,即通过创意实验模拟实施环节来实现培养学生创新动手能力的教改目标。
三、实验设备、工具1、机构运动创新设计实验台,两人一套。
2、交流调速、直流电机等动力控制元件。
3、钢板尺、量角器、游标卡尺。
4、扳手、钳子、螺丝刀等常用工具一套。
四、实验选题1、刮雨器传动装置要求:(1)原动件整周旋转,输出摇杆大摆角摆动(相同的摆角)。
(2)九杆机构。
2、车门启闭机构要求:(1)气缸驱动。
(2)车门开启角度90度。
3、电风扇摇头机构要求:(1)电机驱动。
(2)电风扇左右摆动。
(3)有高副机构。
4、增大CAM升程角的转动导杆和凸轮机构要求:(1)曲柄为输入键。
(2)凸轮与导杆相连。
CQJD机构运动创新带空间机构技术标书

C Q J D机构运动创新带空间机构技术标书Document number【980KGB-6898YT-769T8CB-246UT-18GG08】CQJP-D 机构运动创新设计方案拼装及仿真实验台(带空间机构)该实验台是创新类实验设备,可配置在开放实验室,实验台在教学内容、实验项目、软件功能,到构件的结构及加工工艺、零件的存放方式、实验台外形等方面,在国内同行业中处于领先地位。
自投放市场以来,深受高等院校的一致好评。
主要用于机械原理机械创新设计等课程开设的机构组合创新及其拼装、仿真实验,通过虚拟机构装配、远动仿真和实物机构装配、运转两次实验,加深学生对机构组成原理及运动特点的认识,培养学生机构综合泛计能力及工程实践动手能力。
是构建开放式实验室的重要设备之一。
本实验台配有4个机架,可同时供四组学生进行实验。
本实验台配有35种实验机构,其中平面机构24种,空间机构11种,共有零件1105个。
该实验台可对学生进行机构运动创新设计的两次训练,第一次是用软件虚拟装配实验;第二次是实物装配实验。
由于先进行了虚拟训练,所以第二次实物装配时学生进行得较顺利,能节省实物装配用时。
本产品获有以下五项专利:平面运动机构搭接;平面运动机构搭接机构运动及分析设计方案搭接平面运动机构搭接零件存放柜;平面运动机构搭接零件存放柜实用新型专利,。
一、实验项目1.平面机构组成原理及创新设计的拼装设计实验2. 空间机构的搭接设计实验3. 计算机软件虚拟实验4. 课程设计、毕业设计中进行机构系统方案设计的拼装实验5 创意性设计组合拼装实验二、实验内容1. 平面机构组成原理及创新设计的拼装设计实验(1)外槽轮机构(2)盘形凸轮(尖端推杆)(3)双摇杆机构(直线电机)(4)曲柄滑块机构(5)曲柄摇杆机构(6)齿轮连杆机构(7)平面定轴轮系--分路传动(8)内燃机机构(9)精压机机构(10)牛头刨床机构(11)齿轮--曲柄摇杆机构(12)齿轮--曲柄摆块机构(13)喷气织机开口机构(14)冲压机构(15)插床机构(16)筛料机构(17)凸轮连杆组合机构(18)凸轮-五连杆机构(19)行程放大机构(20)冲压机构(21)双摆杆摆角放大机构(22)自卸货车翻转机构(23)齿轮齿条—双曲柄滑块机构(24)链传动2. 空间机构的搭接设计实验(1)螺旋齿轮传动(空间机构)(2)锥齿轮传动(空间机构)(3)螺旋—双十字轴万向联轴节—蜗轮蜗杆组合传动搭接(空间机构)(4)锥齿—双十字轴万向联轴节—蜗轮蜗杆组合传动搭接(空间机构)(5)螺旋齿—蜗杆蜗轮组合传动搭接(空间机构)(6)锥齿—蜗杆蜗轮组合传动搭接(空间机构)(7)螺旋齿—锥齿组合传动搭接(空间机构)(8)锥齿—螺旋齿组合传动搭接(空间机构)(9)锥齿—槽轮机构组合传动搭接(空间机构)(10)螺旋齿—单十字轴万向联轴节组合传动搭接(空间机构)(11)锥齿—单十字轴万向联轴节组合传动搭接(空间机构)3. 计算机软件虚拟实验(1)实验目的(2)实验注意事项(3)机架介绍(4)零件介绍(5)运动副拼接方法(6)机构运动演示★该软件建有三维零件库;可查询各类零件特点、用途;零件在软件界面中可缩小、放大、移动、360°任意翻转,从各个角度观察,从感观上得到对整个零件的全面认识;★能完成12种运动副的拼接、拆卸(爆炸)的演示。
机构创新实验指导

实验七机构创新实验一、实验目的1.加强学生对平面机构组成原理的认识,进一步了解结构组成及其运动特性,进一步掌握机构运动方案构型的各种创新设计方法。
2.通过机构的拼接,培养学生的创新意识、综合设计及工程实践动手能力。
二、实验设备SNJCX-1型机构运动创新组合设计实训台。
本装置是由铝型材实训台架、交流减速电机、直线电机、电源控制箱、直线电机控制箱和实训零件等组成。
图Ⅰ实训台台架1.实训台架实训台台架是由22根长短不同的铝型材组装而成。
台架中8根立柱铝型材导轨2,可沿X轴方向左右移动。
移动前用内六角扳手旋松上、下横梁4和6上的角铝5的内六角紧固螺钉,然后同时移动立柱2的上下部分(注意:不要倾斜)到需要的位置后,再将立柱2与上、下横梁4和6靠紧再旋紧立柱角铝5的内六角紧固螺钉(注意:立柱角铝5的内六角紧固螺钉只需旋松即可,不允许将其旋下)。
立柱铝型材2的前面和右面凹槽中有固定螺母,可在立柱2上沿Y轴方向移动,移到需要的位置,只需将零件用内六角螺钉打紧即可。
按上述方法移动位置,就可在台架X、Y平面内确定机构各个零件的位置。
更换机构,只需拧松内六角紧固螺钉后,换置即可。
机构组装快速、方便。
减速电机通过电机底座固定在台架底座1上,电机通过减速器减速和调速器调节,可使转速在0~10r/m i n范围内变化,这样可以根据机构的情况和自己的需要来控制电机的转速。
2.减速电机电源控制箱的操作、使用说明电源控制箱是给减速电机提供电源并控制电机转速的,使用前首先把控制箱上电源开关打到“关”的方向,把调速器的开关打到“0”位置,并把调节旋钮逆时针旋置最小,然后把电源控制箱通过电源线连接到电源。
使用时,首先将电源开关打到“开”的方向,通电后调速器“Power”指示灯亮,然后把调速器的开关打到“-”位置,再慢慢顺时针调节调速器旋钮使机构慢慢运动,确保没有问题后,再根据需要选择合适的转速。
3.直线电机的使用说明直线电机安装在实训台台架底部。
实验台使用说明书
目录一、适用范围.........................................................1二、技术条件.........................................................1三、产品特点.........................................................1四、实验台总体布局.........................................................1五、主要部件说明.........................................................2六、上电操作步骤.........................................................13七、断电操作步骤.........................................................13八、注意事项.........................................................13九、简易故障维修.........................................................14一、适用范围本实验装置主要依据《电机学》、《电机及电力拖动》和《工厂电气控制设备》等课程实验大纲的要求,同时也参考了近几年有关院校使用的电机及拖动实验教材的要求而研制。
因此该实验装置基本能满足各有关院校电机、电气技术实验设备的新建和改造。
二、技术条件1、整机容量: 1.5kVA2、尺寸:160cm×75cm×150cm3、重量:450kg4、工作电源:~3N/380V/50Hz/3A三、产品特点a) 测量仪表采用指针式和数字式相结合,保护功能齐全。
材料力学创新组合实验台技术要求
材料力学创新组合实验台技术要求Have an independent personality. November 2, 2021材料力学创新组合实验台技术要求一、基本实验功能组合实验台要求完成以下7种基本实验:1.纯弯曲梁横截面上正应力的分布规律实验;2.电阻应变片灵敏系数的标定;3.材料弹性模量E,泊松比μ的测定;4.偏心拉伸实验;5.弯扭组合受力分析;6.悬臂梁实验;7.压杆稳定实验;二、创新组合实验装置创新组合实验装置主要以两个置于滑轨上可以推拉固定的直角刚架为基本构件,其下部为可伸缩固定的梁杆,其中一个要求配备等强度梁备件;两个梁杆拉出工作时,套筒内部分能够紧固,端部可以对接嵌套在一起;两侧立柱可以搭接其它构件构成不同的组合结构;1两个构件的两侧固定于滑轨上,能在立柱上搭接数种悬臂桁架,模拟雨篷等悬臂结构;此时为加载方便,可将梁杆推进套筒内见图1;图1 平面桁架1构型图2 平面桁架2构型图3 平面桁架3构型2为提高悬臂桁架的承载能力,减小变形,在上部加斜拉杆,即变成超静定悬臂桁架见图2;3将两个悬臂桁架对接在一起,可做出数种构型的超静定桁架,模拟屋架结构;若在上方再增加斜杆,可提高屋架刚度,增加超静次数;见图3;4将两个构件的两侧链杆约束去掉,上部加一横杆,下部横杆拉出,且在自由端加下向荷载时,可构造出刚架与压杆的组合结构,可进行上部压杆,两侧和下部横杆弯曲试验观测见图4;图4 刚架与压杆组合1图5刚架与压杆组合25将两个构件的横杆嵌套在一起,上部加横杆,下部中间加垂直荷载,可构造出超静定刚架与压杆的组合见图5三、技术要求1.加载:实验台采用蜗杆机构以螺旋千斤进行加载,经传感器由力应变综合参数测试仪测力部分测出力的大小;主要技术指标:1试件最大作用载荷8kN;2加载机构作用行程50mm;3手轮加载转矩0~2.6N.m;4加载速度0.12mm/转手轮;要求荷载数码显示,具有过载保护功能;2.应变测量各杆件受力变形采用32节点7窗显示静态电阻应变仪测量,其中1窗显示荷载,6窗显示6个单点应变;主要技术指标:1测量范围:应变0~±19999με,拉压力测量适配满量程输出范围为1.000~3.000mV/V的拉压力应变传感器,能测N、kN、kg、t分辨率±0.01%;2零点不平衡范围:±10000με;3灵敏系数设定范围:1.00~3.00 基本误差:±0.2%F.S.±2个字;4应变测量方式:1/4桥、半桥、全桥;5零点漂移:±3με/4小时;±1με/℃;6桥压:DC 2V;7分辨率:1με;8测点数:XL2118C——1点测力、32CH应变;9显示:应变7位LED——2位测点序号、5位测量值;测力6位LED,4个测量单位指示灯N/kN/t/kg;要求:1各杆件按实验测试要求贴好应变片;2应变片引出线尽可能短,做成插件,实现应变仪与应变片的方便连接;3应变仪接线端要材料耐用,连接方便;3.中控管理要求配备教师管理软件,实现教师对多台组合实验台测试结果的监控,并具备数据存储、数据分析处理、图形显示、打印等功能;4.整体结构基本实验与创新组合实验统一布局在一个实验台上,要求整体结构稳重美观,布局合理,外表细腻光滑,没有尖锐边角,移动方便;各杆件防锈抗腐蚀,坚固耐用,拆装组合方便;。
CQJP-D机构运动创新设计方案实验台.

CQJP-D机构运动创新设计方案实验台实验指导书编著:苏天一谭益松东北电力大学机械工程学院实验室2014年6月简介CQJP-D实验台主要用于机械原理、机械设计和机械创新设计等课程开设的机构拼装及仿真、机构组合创新等实验,是构建开放型、创新型实验室的重要设备之一。
主要技术特点:1、该实验台可以让学生应用零件存放柜中的零件,在机架上装配出自己所构思的机构,用带传动联接电机,使机构运动,并观察机构的运转特征。
有效地增强了学生对所学知识的理解;培养了学生的创新能力和动手能力。
2、该实验台主要由四个机架和一个零件存放柜组成,其中三个机架上配交流带减速器电机,一台配直线电机。
零件存放柜内配备有各种基本杆组、回转副、凸轮、槽轮、齿轮、齿条以及复合铰链等基本构件和联接件等共计70种700多个。
3、零件存放柜设计精巧,各种类各规格的构件分门别类地存放在柜内,品种数量一目了然,便于学生实验操作和教师的管理。
4、连杆等杆件可进行大范围尺寸调整,方便机构组合拼装;复合铰链接头构思新颖,可避免不同平面之间构件发生干涉;带传动的张紧装置,使传动更平稳。
安全规范1、必须佩戴防护眼镜;2、禁止穿着宽松衣服;3、必须挽起长袖或者穿短袖;4、禁止佩戴项链、手表、戒指等物品;5、留有长发的,必须将长发置于帽子或衣服里面;6、必须穿厚皮革鞋,禁止穿帆布鞋;7、禁止戴手套在运行的机器附近;8、安全开关由指导教师控制,其他任何人不得私自上电开机;9、指导教师打开安全开关上电之前,必须检查每一个螺栓是否紧固;10、开机前,指导教师应保证学生在机器1米以外;11、实验结束,由指导教师检查组件完整,关闭电源后方可离开。
东北电力大学机械工程学院实验室机械动力传输创意组合实验平台目录第一章绪论 (7)第二章基础实验1 认识CQZP-D实验台与计算机仿真系统 (8)第三章基础实验2 连杆机构设计与性能分析 (13)第四章基础实验3 齿轮、凸轮、槽轮机构创新设计 (15)附录1 实验报告 (17)附录2 典型机构 (20)第一章绪论机械机构的用途很普遍,不同的机构有不同的用途,按组成的各构件间相对运动的不同,可分为平面机构(如平面连杆机构、圆柱齿轮机构等)和空间机构(如空间连杆机构、蜗轮蜗杆机构等);按运动副类别可分为低副机构(如连杆机构等)和高副机构(如凸轮机构等);按结构特征可分为连杆机构、齿轮机构、斜面机构、棘轮机构等;按所转换的运动或力的特征可分为匀速和非匀速转动机构、直线运动机构、换向机构、间歇运动机构等;按功用可分为安全保险机构、联锁机构、擒纵机构等。
机构运动方案创新设计(PPT 51页)
另外一种形成移动副的拼接方式如图所示。选用两根轴 (6#或8#),将轴固定在机架上,仍后再将连杆11#的长 槽插入两轴的扁平轴颈上,旋入带垫片螺栓15#,则连杆 在两轴的支撑下相对机架作往复移动。
提示:根据实际拼接的需要,若选用的轴颈较长,此时需选用相应的运动构 件层面限位套17#对构件的运动层面进行限位。
如图所示拼接,连杆11#与齿轮2#形成转动副。视所选用盘杆 转动轴19#的轴颈长度不同,决定是否需用运动构件层面限位 套17#。
19
若选用轴颈长度L=35mm的盘杆转动轴19#,则可组成双联齿 轮,并与连杆形成转动副,参见图所示;若选用L=45mm的盘 杆转动轴19#,同样可以组成双联齿轮,与前者不同的是要在 盘杆转动轴19#上加装一个运动构件层面限位套17#。
2
二、实验目的
1
加深对平面机构组成原理、结构组成的认识, 熟悉杆组概念,了解机构运动特点
利用若干不同的杆组,拼接各种不同的平面机
2
构,以培养机构创新设计能力及综合设计能力
通过对实际机械结构的拼接,增强工程实践动
3
手能力。
3
三、实验原理
任何机构都是由若干个基本杆组依次联接到原动件和机架 上而构成的。
工作特点:滑块3、7作往复运动并有急回特性。适当选取机构运动学 尺寸,可使两滑块之间的相对运动满足协调配合的工作要求。
应用举例:蒸汽机的活塞运动及阀门启闭机构。
29
2、自动车床送料机构
结构说明:如图所示,由平底直动从动件盘状凸轮机构与连杆机构组 成。当凸轮转动时,推动杆5往复移动,通过连杆4与摆杆3及滑块2带 动从动件1(推料杆)作周期性往复直线运动。
下列实例的机构运动简图中所标注的数字编号的意义为:横杠 前面的数字代表构件编号,横杠后面的数字为建议该构件所占 据的运动层面。运动层面数的第1层是指机架的拼接起始参考面, 层面数越大距离第1层越远。
动平衡实验台使用说明书

动平衡实验台使用说明书转子动平衡实验一、实验目的1. 加深对转子动平衡概念的理解。
2. 掌握刚性转子动平衡试验的原理及基本方法。
二、实验设备1. PH-I 型动平衡试验台2. 转子试件3. 平衡块4. 百分表0~10mm三、PH-I 型动平衡试验台的工作原理与结构 1. 动平衡试机的结构动平衡机的简图如图1、图2、所示。
待平衡的试件3安放在框形摆架子的支承滚轮上,摆架的左端固结在工字形板簧2中,右端呈悬臂。
电动机9通过皮带10带动试件旋转;当试件有不平衡质量存在时,则产生离心惯性力使摆架绕工字形板簧上下周期性地振动,通过百分表5可观察振幅的大小。
通过转子的旋转和摆架的振动,可测出试件的不平衡量(或平衡量)的大小和方位。
这个测量系统由差速器4和补偿盘6组成。
差速器安装在摆架的右端,它的左端为转动输入端(n 1)通过柔性联轴器与试件3联接;右端为输出端(n 3)与补偿盘相联接。
差速器是由齿数和模数相同的三个圆锥齿轮和一个外壳为蜗轮的转臂H 组成的周转轮系。
(1)当差速器的转臂蜗轮不转动时n H =0,则差速器为定轴轮系,其传动比为:1311331-=-==Z Zn n i ,13n n -= (1)1、 摆架2、工字形板簧座3、转子试件4、差速器5、百分表6、补偿盘7、蜗杆8、弹簧9、电机 10、皮带图13 2 1(1) (2)456789 10 1 23N 1 N 3这时补偿盘的转速n 3与试件的转速n 1大小相等转向相反。
(2)当n 1和n H 都转动则为差动轮系,传动比周转轮系公式计算:1311331-=-=--=Z Zn n n n i H H H ;132n n n H -= (2)蜗轮的转速n H 是通过手柄摇动蜗杆7,经蜗杆蜗轮副在大速比的减速后得到。
因此蜗轮的转速n H <<n 1。
当n H 与n 1同向时,由(2)式可看到n 3< –n 1,这时n 3方向不变还与n 1反向,但速度减小。
机构运动创新设计方案实验台简介
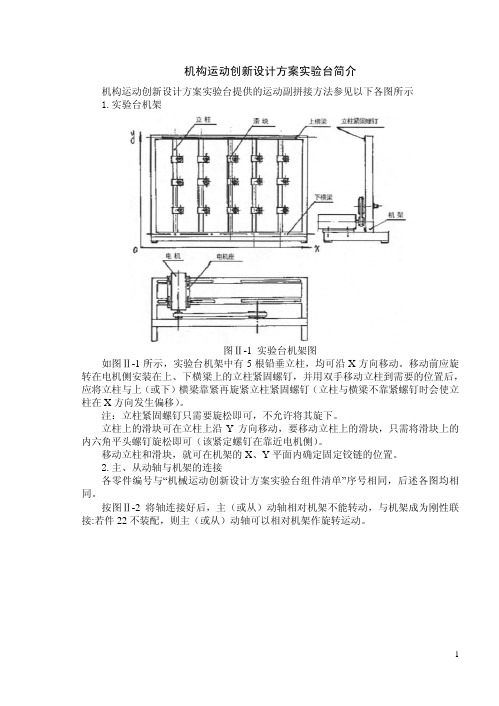
机构运动创新设计方案实验台简介机构运动创新设计方案实验台提供的运动副拼接方法参见以下各图所示1.实验台机架图Ⅱ-1 实验台机架图如图Ⅱ-1所示,实验台机架中有5根铅垂立柱,均可沿X方向移动。
移动前应旋转在电机侧安装在上、下横梁上的立柱紧固螺钉,并用双手移动立柱到需要的位置后,应将立柱与上(或下)横梁靠紧再旋紧立柱紧固螺钉(立柱与横梁不靠紧螺钉时会使立柱在X方向发生偏移)。
注:立柱紧固螺钉只需要旋松即可,不允许将其旋下。
立柱上的滑块可在立柱上沿Y方向移动,要移动立柱上的滑块,只需将滑块上的内六角平头螺钉旋松即可(该紧定螺钉在靠近电机侧)。
移动立柱和滑块,就可在机架的X、Y平面内确定固定铰链的位置。
2.主、从动轴与机架的连接各零件编号与“机械运动创新设计方案实验台组件清单”序号相同,后述各图均相同。
按图Ⅱ-2将轴连接好后,主(或从)动轴相对机架不能转动,与机架成为刚性联接:若件22不装配,则主(或从)动轴可以相对机架作旋转运动。
图Ⅱ-2 主、从动轴与机架的连接图3.转动副的连接图Ⅱ-3 转动连接图按图Ⅱ-3示连接好后,采用件19连接端连杆与件9无相对运动,采用件20联接端连杆与件9可相对转动,从而形成两连杆的相对旋转运动。
4.移动副的连接图Ⅱ-4 移动副连接图5.活动铰链座I的安装图Ⅱ-5 活动铰链I连接图如图Ⅱ-5连接,可在连杆任意位置形成铰链,且件9如图装配,就可在铰链座I 上形成回转副或形成回转-移动副。
6.活动铰链座II的安装Ⅱ-6 活动铰链Ⅱ的连接图如图Ⅱ-6连接,可在连杆任意位置形成铰链,从而形成回转副。
7.复合铰链I的安装(转-移动副)图Ⅱ-7 复合铰链I的连接图将复合铰链I铣平端插入连杆长槽中时构成移动副,而连接螺栓均应用带垫片螺栓。
8.复合铰链II的安装图Ⅱ-8 复合铰链Ⅱ的连接图复合铰链I连接好后,可构成三构件组成的复合铰链,也可构成复合铰链+移动副。
复合铰链II连接好后,可构成四构件组成的复合铰链。
CSI-200E数字式综合测量控制装置说明书_V3.03
CSI-200E数字式综合测量控制装置说明书CSI-200E数字式综合测量控制装置说明书编制:张炜校核:叶艳军标准化审查:郑蔚审定:刘炬出版号:文件代号:出版日期:版权所有:北京四方继保自动化股份有限公司注:本公司保留对此说明书修改的权利。
如果产品与说明书有不符之处,请您及时与我公司联系,我们将为您提供相应的服务。
技术支持电话:0 传真:0重要提示感谢您使用北京四方继保自动化股份有限公司的产品。
为了安全、正确、高效地使用本装置,请您务必注意以下重要提示:1)本说明书仅适用于CSI-200E/CSI-200EA装置。
2)请仔细阅读本说明书,并按照说明书的规定调整、测试和操作。
如有随机资料,请以随机资料为准。
3)为防止装置损坏,严禁带电插拔装置各插件、触摸印制电路板上的芯片和器件。
4)请使用合格的测试仪器和设备对装置进行试验和检测。
5)装置如出现异常或需维修,请及时与本公司服务热线联系。
6)本装置的操作密码是:8888。
目次1装置概述 .......................................................... 错误!未定义书签。
装置主要功能 ..................................................................... 错误!未定义书签。
装置主要特点 ..................................................................... 错误!未定义书签。
2技术条件 .......................................................... 错误!未定义书签。
环境条件 ............................................................................ 错误!未定义书签。
LB-CNP(B)便携式多参数快速测定仪使用说明书

LB-CNP(B)便携式多参数快速测定仪使用说明书安装、使用本产品前,请详细阅读本使用说明书感谢您选用LB-CNP(B)便携式多参数快速测定仪。
在使用仪器前,请您仔细阅读本使用说明书,从中可以获得有关仪器性能、使用方法以及维护等方面的信息,这会有助于您更好的使用仪器。
如果您有好的建议或需要我们提供更进一步的服务,请按以下方式与我们联系:仪表一部400-6086-707仪表二部400-9929-113室内环保400-6316-707网址:厂址:山东青岛市城阳区金陵工业园锦宏西路与路博路交接口路博1号门。
目录目录 (2)安全警示和注意事项 (3)免责 (4)第1节引言 (5)第2节功能特点与技术参数 (6)第3节.试剂的配制 (8)第4节按键说明 (13)第5节仪器的基本操作 (14)5.1COD的测定 (14)5.1.1方法与原理: (14)5.1.2干扰及消除 (14)5.1.3水样氯离子的测定 (14)5.1.4水样的稀释 (14)5.1.5测定过程 (15)5.2总磷的测定 (19)5.2.1方法与原理: (19)5.2.2干扰和消除 (19)5.2.3水样的稀释 (20)5.2.3测定过程 (20)5.3氨氮的测定 (23)5.3.1方法原理 (23)5.3.2干扰及消除 (23)5.3.3水样的稀释 (23)5.3.4测定过程 (24)5.3.5水样的预处理 (26)5.4测量记录的保存与查询 (27)5.5设置系统时间 (28)5.6测量曲线的选择与修改 (29)第六节仪器校准及曲线的标定 (31)6.1标准溶液的配制: (31)6.2曲线值的校准: (31)第7节消解系统的操作 (34)7.1按键功能介绍 (34)7.2主工作界面及说明 (34)7.3消解器操作说明 (34)7.3.1设置温度参数: (34)7.3.2设置定时参数 (35)7.3.3启动/停止消解过程: (35)7.3.4设置PID参数 (35)第8节常见故障及排除方法 (36)安全警示和注意事项在使用仪器之前,请仔细阅读“安全警示和注意事项”,以确保正确和安全的使用该仪器。
国家实验室智能控制系统多轴运动板手册说明书

Motion ControlNational Instruments548C o n t e n t s a n d O v e r v i e wM o t i o n C o n t r o lContentsMotion Products Selection Guide ..............................550Tutorial . (551)Understanding Motion Basics........................................................551Stepper and Servo Motors..............................................................552Microstepping in Stepper Motor Systems ....................................553Feedback for Closed-Loop Control ................................................554Motion Operation Modes. (555)SoftwareLabVIEW Motion Virtual Instruments............................................556Windows Software for Motion Control..........................................557C Programming for Motion (557)HardwareFlexMotion High-Performance Boards ......................................558Specifications..................................................................................561ValueMotion Boards ....................................................................562Overview..........................................................................................562Stepper Boards................................................................................564Servo Boards ..................................................................................565Specifications..................................................................................566PeripheralsUMI Wiring Interfaces ....................................................................567nuDrive Power Drivers.. (568)Motion ControlOverviewOverviewNational Instruments Phone:(512)794-0100•Fax:(512)683-8411•****************• 549Advanced Motion Performance Using PC-Based StandardsMotion control on the PC is the new standard for intelligent motion integration. The combination of advanced performance, real-time, embedded CPU-based controllers, PCI bus throughput, and Windows graphical programming make PC-based motion the correct choice for powerful, easy-to-use solutions. Motion control on the PC has moved beyond ASCII text programming to interactive graphical interfaces and icon programs on multiprocessor plug-in controller boards, which offload motion tasks from the host PC. These advantages provide seamless integration of motion, vision, data acquisition, and instrument control functions in one system developed using the same software with compatible tools and backed by a uniform worldwide sales and support network. National Instruments motion products are excellent system solutions; they are unsurpassed when used in conjunction with vision and other applications.Motion Products forOEM ApplicationsOEMs need performance, reliability, flexibility, lower cost, and premium support in their motion control products. National Instruments motion control products exceed OEM expectations in all four areas; and as a result, are making equipment manufacturers successful worldwide. Our ValueMotion and FlexMotion products are performance motion controllers with the correct level of compatibility for all OEM applications. Our motion products are manufactured and tested to exceed ISO-9000 quality standards and CE conformance standards.The National Instruments Sales, Support, and Engineering team works closely with OEMs to provide product feature and function enhancement. Our sales people are engineers, trained to make your PC-based measurement and automation application successful.For OEM support well beyondthe industry standard, contact oneof our motion product businessdevelopment managers to discussyour application requirements.What to Look for inMotion Control SystemsA motion control system must make integration of motioncomponents simple while maintaining the performance andflexibility of each component. National Instruments hasdeveloped a premium offering of motion products, and softwaredevelopment tools designed for integration. The connectivitybetween National Instruments motion system componentsfollows industry-standard specifications at each point – controllerto driver, driver to motor, and software to application. Thisconsistency makes your choice of any individual product, or anentire solution, the right choice.To ensure rapid system development, use motion hardwareand LabVIEW graphical programming software for Windowsfrom the same company that designed these tools to worktogether – National Instruments. Spend more time operating yourmotion system and less time figuring out how to configure it. Oursurprisingly simple– yetpowerful – operatorsoftware panels makeit easy to build andrun motionsystems.Motion Control550National InstrumentsPhone:(512)794-0100•Fax:(512)683-8411•****************•Motion ControlTutorialTutorialNational InstrumentsPhone:(512)794-0100•Fax:(512)683-8411•****************•551IntroductionMotion control is a broad term that can be simply defined as the precise control of anything that moves. National Instruments motion control products include PC-based controller boards,wiring, and connectivity devices, power driver units, and software tools and applications. These motion products are optimized for use in test and measurement automation,laboratory automation, industrial control, robotics, material handling, integrated machine vision, CNC machine tool control,and OEM motion applications.National Instruments motion products are designed for powerful yet simple application in both point-to-point and advanced multiaxis coordinated motion systems. The full complement of software tools includes – 32-bit DLL and drivers for C/C++/Visual Basic and LabWindows/CVI in Windows NT/98/95. In addition, the software tools include ready-to-run applications for out-of-the-box motion operation and VIs for graphical object-oriented motion programming with LabVIEW and BridgeVIEW. As a user or integrator of motion control products, it is easy to achieve optimal results and leverage off new standards in motion programming with our PC-based motion control products.PC-Based Architecture for Servo and Stepper ControlServo and stepper motors are widely used for position and velocity control in a variety of electromechanical confie of the PC as an operator interface (HMI), local control host,and remote system controller platform is widely accepted andUsing an intelligent real-time controller board for motion in the PC accomplishes two major objectives in integrating motion,vision, and data acquisition. The first is offloading low-level axis control, closed-loop control, and multiaxis coordination from the host PC; the second is providing a fast, flexible, industry-standard PC-based platform for integrated motion functions.Understanding Motion BasicsA motion control system consists of five major components – the mechanical device being moved, the motor (servo or stepper)with feedback and motion I/O, the motor driver unit, the intelligent controller , and the programming/operator interface software. While solutions exist for a stand-alone distributed motion control and closed architechture motion controllers from other vendors, it is clear that PC-based automation, as well as a focus on PC-based motion solutions and open standards for hardware and software components, is fueling growth in this area.Understanding the requirements of your motion system and the basic technologies for motion are key in selecting products for your application. This tutorial covers motion controller board architecture, servo and stepper motors, motor drivers, feedback for closed-loop control, motion control modes, motion I/O, and industry-standard signals for third-party motion component connectivity. The National Instruments motion products access and control these technologies while emphasizing connectivity between components and graphical tools for development.Motion ControlMotion Control TutorialNational InstrumentsPhone:(512)794-0100•Fax:(512)683-8411•****************•552T u t o r i a lcounter/timer capabilities differently, providing a choice of general-purpose or high-performance solutions. All National Instruments motion controller boards are designed for integrated operation of their dual processor configuration in the LabVIEW and BridgeVIEW graphical programming environments, as well as with LabWindows CVI, C/C++, Visual Basic, and other major development tools.Stepper and Servo MotorsStepper and servo motors are both generic terms covering many technologies. Stepper motors are discrete motion devices that move to positions that relate directly to the number of input control pulses, at a velocity that relates directly to the pulse rate. Servo motors are continuous motion devices that use feedback signals to provide position and velocity control in a closed-loop environment.open-loop servo motor rotates or moves uncontrolled as long as power is applied to it. By implementing a control loop around a servo motor, using a PID controller and feedback from an encoder device mounted on the motor , it is possible to accurately and reliably move to the desired position at well controlled velocities following user-specified motion trajectory paths.All servo motor systems use a motor driver power unit to control the voltage and current that flows through the motor armature and motor windings. The basic principle of motion in servo motors is based on the flow of current through a wire coil,generating a magnetic field that reacts with permanent magnets in the motor to cause attraction and repelling forces that cause movement.M o t i o n C o n t r o lMotion ControlTutorialTutorialNational InstrumentsPhone:(512)794-0100•Fax:(512)683-8411•****************•553DC Brush Servo MotorsThe DC brush servo motor , the simplest servo motor design, is cost effective for its performance and power in general-purpose servo applications. DC brush servo motors are self-commutating motion devices that rotate continuously while current is applied to the motor brush contacts. The current flows through the brushes to the armature and then through the motor coils,creating the magnetic forces that cause motion. Changing the direction of current flow through the motor reverses the direction of rotation. Encoder feedback to the motion board is required to provide accurate control of position and velocity with a DC brush servo motor . Encoders are mounted on the shaft of a motor or on the coupled mechanical unit as a linear or rotary device, directly translating movement into feedback data.Stepper MotorsStepper motors rely on the principle of commutation or alternating magnetic forces, to provide predictable controlled motion. Commutation in motion applications is the controlled sequencing of drive currents and voltages in motor coil windings to provide torque and therefore, movement. In a stepper motor system, individual step signals from a motion control board are converted into an energizing pattern for the motor coils.As the commutation pattern varies, the motor moves from one discrete position to another . When the pattern is held in a single state, the stepper motor holds its position with a known torquefull-step locations of a stepper motor the basic resolution of the motor to as 1.8 degree/step motor revolution per minute (rpm).Microstepping in Stepper Motor SystemsAdvanced stepper motor driver technology provides a capability known as microstepping. Microstepping is based in the stepper motor driver component. It provides for the predetermined subdivision of each full step into microsteps by proportioning the currents in each coil to produce carefully balanced electromagnetic locations between the full steps. To quickly review the technology of microstepping, sine and cosine proportioned values of current are carefully sent to particular motor coils, resulting in the simulation of interim microstep locations. The advantage of microstepping is multiplication of the number of steps per revolution, thereby increasing the resolution of a stepper motor system. Additionally, because more steps are provided, the movement between steps is smaller and the resulting step motion is typically smoother. Microstepping technology is widely accepted and fully implemented in all National Instruments stepper control and driver products.Because stepper motion is controlled by the generation of step pulses from the controller board, it is clear that the stepper motor controller must carefully control the number of pulses (position), the frequency of the pulses (velocity), and the rate of change of frequency (acceleration/deceleration). This process is referred to as trajectory control, where the trajectory is the predictable path of speed changes that the motor undergoes as it moves from its starting position to its desired end position through its profile or as it runs continuously at desired velocities.Motion ControlFigure 3. Stepper Motor Controllers and nuDrives Support MicrosteppingMotion Control TutorialNational InstrumentsPhone:(512)794-0100•Fax:(512)683-8411•****************•554T u t o r i a lFeedback for Closed-Loop Motion ControlMotion systems use feedback signals to provide closed-loop control of position and velocity. Although feedback is optional in stepper motor systems, servo motor systems require feedback for proper control, operation, accurate motor position, and velocity maintenance. The most common feedback used with intelligent motion control boards is quadrature incremental encoder feedback.Feedback devices provide signals that convey position and velocity data to a motion controller . The signals are converted on the motion controller into count values that correspond to position. Position values, measured over fixed periods of time,Quadrature Encoder FeedbackQuadrature incremental encoders are optoelectronic feedback devices that use a patterned optical mask and optointerrupter-LED source/transistor detector pairs to generate two digital output waveforms, where the pulse location of the waveforms are 90 degrees out of phase with each other . This 90 degree phase difference in the waveforms (quadrature) is used by the encoder input circuitry to enhance the resolution of the position count value and to determine the direction of motion. If the A phase signal leads or comes before the B phase signal, then motion direction is considered clockwise or forward. For the opposite phasing, the direction is considered counter-clockwise or reverse.The quadrature encoder input circuits decode the phasing of the signals and count the quadrature pulses to derive position information. The position count value is maintained in a 32-bit register , providing more than 4 billion position locations.The detector circuits for encoder feedback on the motion controller boards incorporate digital signal filtering techniques to avoid deception by noise pulses or erroneous data that does not fit the quadrature model.Analog FeedbackAlthough quadrature encoder feedback is the most common type used, you can use analog feedback to provide the same position and velocity data. If an analog input signal is measured and converted by an ADC on the motion board, the analog value generates a corresponding digital value. This value is then used as position data and the overall range of available positions is determined from the resolution of the ADC. Analog feedback,.acceleration phase. Switching power supplies typically suffer from output shutdown when the motor driver attempts to draw the extra current that it requires during acceleration.National Instruments motion control products provide two different solutions for motor driver configuration. The nuDrive units are fully enclosed motor driver subsystems with a single cable connection from the motion control board. nuDrives include the appropriate motor driver types per axis, for small DC brush type servo or stepper motors, along with bulk DC power supplies specifically designed to provide the voltage and currents demanded by these drivers. Additionally, nuDrive units incorporate all of the necessary low-voltage power supplies,wiring connectivity, signal conditioning, and monitoring that are appropriate for motion system integration with encoders, limit switches, and other motion I/O devices.If nuDrive voltage and current capabilities do not meet the requirements of a specific motor, it is simple to connect to third-party motor drivers using a universal motion interface module (UMI).M o t i o n C o n t r o lMotion ControlTutorialTutorialNational InstrumentsPhone:(512)794-0100•Fax:(512)683-8411•****************•555The UMI accepts the single cable connection from the motion controller board and breaks out the motor , encoder , limit, and motion I/O signals on a per-axis basis into separate pluggable screw terminal connections. The UMI provides all of the onboard signal conditioning and monitoring found in a nuDrive. Because the motion controller board outputs industry-standard signals,through the UMI, this configuration provides for limitless connectivity. You can use any size or type of motor , as long as the associated driver unit is compatible with the standard control and feedback signals.Motion Operation ModesPC-based servo and stepper controller boards offer a wide variety of operation modes. The modes listed provide operational features and functionality at a high level, making it simple to solve motion applications. Access these standard operation modes in a fully integrated motion system with powerful software tools. Easy-to-use Windows software, drivers, and Motion VIs make mode operation, parameter loading, and status display a snap. Motion is controlled in absolute or relative mode, and you can use all position breakpoint, position value capture, and status functions.Point-to-Point Position ModeIn point-to-point mode, each axis is indepen-dently programmed with motion profile parameters. Values for velocity, acceleration,deceleration, S-curve, and target position are loaded prior to a start command.Linear Vector Interpolation ModeIn linear vector interpolation mode, you canassign axes to a vector space; motion control ofthe axes accurately follows the desired vector path, at the programmed vector velocity,acceleration, and deceleration values. Vector spaces can contain one, two, or three axes and you can synchronize multiple vector spaces. You can also sequence and blend motion profiles for smooth transition.Electronic Gearing, Master/Slave ModeIn electronic gearing and master/slave modes,you can configure any axis or axes to run at a gear ratio to any master axis. The master axis could be encoder feedback only, or a motor under closed-loop control. These powerful gearing modes are used for coil winding, flying cutoff, rotating knife, high-speed labeling, and all other geared and slaving applications.Circular, Spherical, and Helical Interpolation ModesIn these modes, the motion parameters describing arcs, vector velocity, accel/decel,radius, start angle, and target angle are loaded before the move is started. For helicalinterpolation, the target height (Z) is also loaded and for spherical interpolation, two start angles and two target angles are specified. Motion will accelerate to the vector velocity while following the path indicated by target angles and height.S-curve on a motion profile is controlled by separate accel-eration and deceleration smoothing (jerk-limit) factors.Velocity Profiling ModeThis mode provides a user-programmed acceleration to a desired target velocity that is accurately maintained until a new target velocity value is loaded. You can change velocity on the fly.Jog Modeparameter is updated on the fly or a stop command is issued.Registration ModeRegistration is used to capture the exact position when the high-speed capture input signal transitions. The high-speed capture eliminateslatency and provides precise motor control athigh velocities. High-speed capture input position values are automatically combined with a registration move; and the new motion can be completed autonomously.Homing ModeHoming is accomplished through the Findindex (marker) pulse of the feedback encoder device, and then moves to the index offset position. Homing mode is used during system setup and initialization.Motion Control。
《ETCEE-100电子技术实验台使用说明》20090330

《ETCEE-100电子技术实验台说明》传统的电子技术基础实验通常是在各种专用的教学实验箱上完成的。
这些实验箱大多配有专用的实验模板或特定的实验模块区,实验电路和硬件已经基本确定,学生经过简单的连线、搭接就可以完成硬件工作。
这种实验箱便于实验课的组织实施,适于格式化、重复式的实验项目。
当然,通过实验箱上面配备的面包板,可以搭接学生自己设计的实验电路。
这种在大专院校被广泛使用的电子技术实验箱在便于组织实验内容的同时,也存在着一些缺点。
首先,模块化的电路千篇一律,以验证性实验为主,学生自己设计、制作的空间很小,不利于培养学生设计和动手能力。
其次,实验箱面积有限,完成一个实验项目之后就要拆除,无法保留多个实验电路,因此也难以体现各个实验模块之间的联系,缺少系统性。
另外,实验箱要反复使用,面向不同班级,不同实验,需要及时恢复到初始状态,因此对那些未能按时完成规定实验或还想扩展实验的学生来说,只能是不了了之或下次重新搭接,影响的实验效率和效果,也不符合因人而异、因材施教的教学理念。
本电子技术实验台的设计,较好地解决了传统电子技术实验箱存在的缺点,实现了实验内容、实验时间和实验空间的全面开放,为提高实验的水平,保证实验的质量,建立开放型的实验体系奠定了硬件基础。
一、ETCEE-100电子技术实验台硬件的结构ETCEE-100电子技术实验台包括两个部分:实验台主机箱和配套模板,下面逐一加以介绍。
图1 ETCEE-100 实验箱的外观1、主机箱的功能主机箱包括9个外形尺寸相同的电路板插接区,可以插放各类工具模板和实验模板,通过机箱内部的母板可以使各个电路板的信号线和电源线相互连接。
主机箱上端设有电源、输入信号和输出信号的接线端子,作为连接外部电源、信号源和测试仪器的接口,这些电源和信号线都将连接到每块电路板接口的引脚上。
机箱内部有一个多组的变压器,可以为电源模板提供交流输入。
图2 ETCEE-100 实验箱母板各类接口的连接图每个插接区都包括两个接口JA和JB,采用双排插针的形式,JA为34线,JB为26线。
实验台(使用说明书)

实验台(使⽤说明书)RTPLC-4型可编程控制器实验台使⽤说明书1. 概述RTPLC型可编程控制器实验台根据⽬前我国⾼等院校⾃动控制专业及相关专业课程的实验内容,采⽤新型⼯艺精⼼设计⽽成。
本产品选⽤优质材料及元器件,保证了产品的可靠性和使⽤寿命。
本产品⼴泛适⽤于教学、PLC控制实验、科研开发等领域。
1.1 实验台分类实验台按结构分为三种类型:RTPLC-1型:演⽰实验采⽤挂箱结构;RTPLC-2型:演⽰实验采⽤挂箱和⾯板混合结构;RTPLC-3型:演⽰实验采⽤⾯板结构;RTPLC-4型:演⽰实验采⽤⾯板结构,整体为矮式。
实验台按PLC主机分为三种型号:RTPLC-A型:采⽤三菱FX系列PLC主机,点数为24~60点;RTPLC-B型:采⽤欧姆龙CPM1A系列PLC主机,点数为20~40点;RTPLC-C型:采⽤西门⼦S7-200系列PLC主机,点数为24~40点。
1.2 整机结构整机由实验桌和实验屏两部分组成,便于运输。
实验桌的右半部分可加装键盘和⿏标托板,右侧可加装显⽰器托板,在使⽤计算机时,使整体布局紧凑美观。
实验桌下部为⼤容积柜体,可放置相关实验挂箱及仪器设备等。
整机⾯板采⽤2.0mm厚单⾯环氧树酯敷铜板和铝板为基板,正⾯为彩⾊喷塑;外形美观,坚固耐⽤。
⾯板接线插座采⽤⾃锁紧式镀⾦迭插插座(弱电)或⾃锁紧式⾹蕉插座(强电),接触电阻⼩、防氧化、防锈蚀,使⽤寿命长。
实验插接线采⽤⾼纯度多股铜线,⼿感好、耐弯折,插头采⽤可拆装式结构,便于维修。
实验台提供220AC电源、24VDC稳压电源、0~12VDC可调电源和0~20mA直流可调电源(选配),采⽤电流型鉴幅鉴相漏电保护器(4型⽆)、优质漏电保护开关、电压型漏电保护电路(4型⽆)等多重防护措施,使实验安全得到充分保障,并能充分满⾜实验要求。
1.3 实验项⽬⽬前可提供的实验清单如下:基本指令编程练习抢答器数码显⽰礼花之光⼗字路⼝交通灯⽔塔⽔位控制(实物模拟)⾃动轧钢机⾃动装配流⽔线四相步进电机(实物模拟)液体⾃动混合三相异步电动机星/三⾓换接启动四节传送带(实物模拟)机械⼿动作模拟邮件分拣直流电机正反转加⼯中⼼⼑具库⾃控成型机电梯控制系统⽴体车库(注:可根据⽤户具体要求进⾏其它实验项⽬的开发)以上实验⼤部分配有主流⼯控组态软件演⽰(MCGS 5.1),使演⽰实验更加⽣动、形象且更加贴近实际的⽣产控制过程(注:以上软件需另购)2. 技术指标2.1 物理特性整机重量:约120Kg外形尺⼨:1200 (W;加装显⽰器托板后为1480)×680(T)×1270 (H)2.2 整机电源⼯作电源:单相三线 AC 220V±5% 50Hz±5%整机容量:660kVA熔丝规格:5×20-3A2.3 环境条件⼯作温度:-10~40℃贮存温度:-10~60℃⼯作湿度上限:90%RH(40℃)贮存湿度上限:90%RH(40℃)其它要求:避免频繁振动和冲击,周围空⽓⽆酸、碱、盐等腐蚀性⽓体。
贝克电子学测试仪器及设备用于建筑工程质量检测说明书
E L E C T R I C A C T U A T O R SF O R I N D U S T R I A L P R O C E S S C O N T R O L 80-1103-00Rev. 01.7INSTRUCTION MANUAL11-1_911-2_911-3_911-4_9MODELSEXCERPTINPUT: DIGITAL CONTROL MODULE (DCM-2)Beck modulating drives are equipped with a precision, digital control module (DCM-2) designed to receive conventional 4–20 mA or 1–5 V dc control signals directly—eliminating the need for contact protection devices, relays, switches and reversing starters.The DCM-2 modulates the drive output shaft in response to an analog Demand input signal and is designed to operate continuously in temperatures up to 185°F (85ºC).The DCM-2 provides intelligent calibration, easy drive setup changes, and diagnostic information. A Local interface provides quick pushbutton setup and diagnostics without the need for a handheld or remote device (see page 23). A HART communications interface allows remote access of all features and information (see page 36). A Serial interface also allows for drive configuration changes, drive information reporting and to assist in troubleshooting (see page 66).The DCM-2 permits two or more Beck drives to be operated by a single signal source. See pages29 and 57 for details on split range operation.A square function is available to position the drive’s output shaft proportionally to the square of the input signal. This function is factory configurable (specify at time of order) or may be configured using the HART interface (see page 46) or Serial interface (see page 70).DIGITAL CONTROL MODULE (DCM-2)22OVERVIEWThe DCM-2 customer interface panel (pictured below) allows the user to easily calibrate the drive and troubleshoot conditions. The following information provides an overview of the DCM-2 customer interface panel features.NOTE: Beck drives are shipped from the factory set up and calibrated to customer specifications placed at the time of order and are ready for installation.Overview LEDsThe four LEDs, as highlighted below, indicate the present state of the drive.FWDThis LED is lit when the drive is receiving aDemand signal greater than its position.REVThis LED is lit when the drive is receiving aDemand signal smaller than its position.STATThis LED is lit when additional status isavailable. For details regarding possibleconditions, see “Status Indication LEDs”on page 24.PWRThis LED is lit when power is applied to thedrive. This LED pulses from bright to dimindicating the DCM-2 is fully operational.2324Pushbutton Controls The five pushbuttons (pictured below) on the DCM-2 customer interface panel are used for calibration. When pressing a pushbutton, pressure should be maintained until the “ACKNOWLEDGE” LED lights; this confirms receipt of the pushbutton command. See the Calibration section, beginning on page 25, for further explanation of the calibration procedures. Pushbutton functions are as follows: CALIBRATE A safety feature, this button must be pressed and held while pressing the pushbuttons described below to set the Position and Demand signal limits. CAUTION Pressing the following buttons may change calibration and cause the drive to reposition. SET POS 100% Press to set the desired 100% position for drive movement (this will correspond to a 100% Demand signal). SET POS 0% Press to set the desired 0% position for drive movement (this will correspond to a 0% Demand signal). SET DEM 100% Press to set the Demand input signal that corresponds to 100% Demand. SET DEM 0% Press to set the Demand input signal that corresponds to 0% Demand. Status Indication LEDsWhen the “STAT” LED is lit, the applicable statusindication LED(s) (pictured below) will light to revealthe condition(s) as described below. An alarm isalso available at terminal E. When the condition iscorrected, the status will automatically reset. Eachstatus LED is described below, with a more detailedexplanation of the function provided on page 21.DEMANDLoss of the Demand input signal.POSITIONThe CPS Position signal to the DCM-2 isout of the calibrated range limits. The lowerlimit is –5% and the upper limit is 105% ofthe calibrated range. This LED may alsoindicate a CPS or internal wiring failure.TRQ/THRUSTThis LED indicates that excessive torqueis present (over 105% of the drive rating).This LED is functional only when the driveis equipped with optional torque sensing.STALLThe drive is in a stall condition and stallprotection has been activated.TEMP °F.Drive’s internal temperature is outside ofrating.FB OPENExternal position Feedback signal isenabled, but not wired to an external loador the wiring has failed between the driveand the monitoring device.STOP/LIMITHandswitch is in “STOP” position or thedrive is at a limit and is not in balance.Status Indication LEDs Pushbutton ControlsF W D R E VS T A TPWRF W D R E V S T A T P W R。
JgPK-C平面及空间机构创意组合及测试分析实验台

JGPK-C型平面及空间机构创意组合及测试分析实验台(4台/套)一、主要技术参数:1、驱动交流电机功率N=90W,转速n=10 r/min;2、交流直线电机功率N=25W,转速n=10rpm,行程L=700;3、光栅角位移传感器2个:GFJ-7-5V/1000P,转速:1000栅/转;4、直线位移传感器一个:WYDC-200L,量程L=200mm,精度:0.1%;5、连杆从50-350mm不等,长度可无级调节;6、带传动比为1:1.5,链传动比为1:1.3;7、正齿轮各三种m=2. Z= Z=28、34、42、51;8、斜齿轮一种、锥齿轮一种、外形尺寸:1000×400×650mm;9、重量:25kg。
二、基本配置:1、每套实验台配有4台机架;2、驱动交流电动3个,,交流直线电机1个;3、轴类提供了100多个零件,主要供实验时安装各种迴转体零件及辅助作用;4、接头类零件保证在实验时,组合各种构件及连杆机构和传动机构的需要;5、连杆共有五种56个零件,连杆为长方形,基本连杆中最短为50mm,最长为350mm,可用于各种拼接,如组成五种平面低副Ⅱ级杆组和四种平面低副Ⅳ级杆组,超过350mm的杆可另行组装连接加长而成;6、齿轮齿条类零件:⑴正齿轮各三种,M=2,α=20°Z=28、34、42、51;⑵齿条一种4个零件:与齿轮模数相等,可通过连接件与齿轮配合使用,可组装齿轮齿条机构。
⑶斜齿轮一种、锥齿轮一种、行星齿轮一种、涡轮蜗杆一种7、特殊传动零部件:1)凸轮组件(凸轮推回程均为正弦加速度运动规律)1套;2)槽轮及拨盘组件1套;3)棘轮及组件1套;4)链轮链条1套;5)不完全齿轮1对(m=1.5);6)万向节传动:2种(单头、双头)配套工具、机罩、使用说明书及实验指导书各一套;7)设备配有一零件存放柜。
8、配套虚拟软件说明:1)实验台所有零部件的三维实体图、2)12种运动副拼装方案、3)14种工程机械原理拼装方案、4)21种平面机构运动仿真动画、5)9种三维机构运动仿真动画、6)拆卸分解过程爆炸演示。
机构运动方案创意与搭接
机构运动方案创意与搭接一、实验目的1.通过实际机构的应用设计和搭接加深对不同机构运动特性的理解。
2.通过对典型机构的组装,掌握活动连接、固定连接的结构和特点;了解实际机构与机构运动简图的不同处,避免设计时出现运动的干涉。
3.通过现场操作,培养实际动手和现场应变能力。
4.通过实验的多方案设计培养发散思维和创新设计能力。
二、实验设备ZBS-C机构运动创新设计实验台。
本实验台提供的运动副拼接方法见附录Ⅱ。
本实验台有不同种类的基本机械构件,可根据选择或设计的实验类型、方案和内容,动手进行机构搭接、调试和测试。
本实验台可进行的实验内容:1.平面机构组成原理的拼装。
2.平面机构创新设计的拼装。
3.课程设计、毕业设计中进行机构系统方案设计的拼装。
4.课外学生进行机构运动创新设计方案拼装。
三、实验原理1.机构的组成原理:任何平面机构均可以用零自由度的杆组依次连接到原动件和机架上去的方法来形成。
这也是机构创新设计拼装的基本原理。
2.杆组的拆分步骤:① 计算机构的自由度,并确定原动件。
② 从远离原动件的构件开始拆杆组。
先试拆Ⅱ级杆组,若拆不出Ⅱ级杆组,再试拆Ⅲ级杆组。
即杆组的拆分应从低级别杆组依次向高级别杆组拆分。
正确拆分的判断标准:每拆分出一个基本杆组后,留下的部分仍应是一个与原机构相同自由度的机构,直至全部杆组拆出只剩下原动件和机架为止。
③ 确定机构的级别。
注:同一机构所取的原动件不同,有可能成为不同级别的机构。
但当机构的原动件确定后,杆组的拆法是唯一的,即该机构的级别是确定的。
若机构中含有高副,为研究方便起见,可根据一定条件将机构的高副以低副来代替,然后再进行杆组拆分。
3.杆组的拼装:根据事先拟定的机构运动简图,利用机构运动创新设计实验台提供的零件按机构运动的传递顺序进行拼装。
拼装时,通常先从原动件开始,按运动传递规律进行拼装。
拼装时,应保证各构件均在相互平行的平面内运动,这样可避免各运动构件之间的干涉,同时保证各构件运动平面与轴的轴线垂直。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CQPS-E机构运动参数测试组合创新实验台一、实验目的1、加深对平面机构组成原理及运动特点的认识,提高机构综合创新设计能力。
2、通过实验机构的搭接训练,测试系统的组建及机构运动参数的测试,提高实践动手能力。
3、掌握机构运动参数(线位移、线速度、线加速度及角位移、角速度、角加速度)的测试方法,对比分析机构运动性能。
二、实验设备及工具1、CQPS-E机构运动参数测试组合创新实验台及其配套系统软件。
该实验台有CQPS-E/1~4型共四台套(如下图),每个台架上均可安装3个实验机构,总共可安装12个实验机构,学生可分四组同时实验。
(客户可选购我公司此产品中的任一单一套产品,使用说明书同时使用此版本)CQPS-E/1 CQPS-E/2CQPS-E/3 CQPS-E/4(1)、CQPS-E/1型可安装实验机构:A.正弦机构;B.等加速-等减速运动凸轮机构;C.简谐运动凸轮机构;其中两种凸轮机构均有尖顶、滚子、平底三种从动件,均为对心移动从动件盘形凸轮机构。
(2)、CQPS-E/2型可安装实验机构:A.齿轮-对心曲柄滑块机构;B.齿轮-偏置曲柄滑块机构;C.槽轮机构;(3)、CQPS-E/3型可安装实验机构;A.曲柄摆块-齿条齿轮机构;B.摆块机构;C.齿轮-曲柄摇杆机构;(4)、CQPS-E/4型可安装实验机构A.摆动导杆-对心滑块机构;B.摆动导杆-偏置滑块机构;C.摆动导杆-双摇杆机构;2、平面机构创意组合测试分析仪。
3、配套工具:十字螺丝刀,固定扳手,内六角扳手,钢板尺,卷尺。
三.实验原理1、机构的组成原理机构具有确定运动的条件是其原动件的数目应等于其所具有的自由度的数目。
因此,如将机构的机架及与机架相连的原动件从机构中拆分开来,则由其余构件构成的构件组必然是一个自由度为零的构件组。
而这个自由度为零的构件组,有时还可以拆分成更简单的自由度为零的构件组,将最后不能再拆的最简单的自由度为零的构件组称为基本杆组(或称阿苏尔杆组)简称为杆组。
由杆组定义,组成平面机构的基本杆组应满足条件:F=3n - 2P1 - P h=0式中:n为杆组中的构件数;P1为杆组中的低副数;P h为杆组中的高副数;由于构件数和运动副数目均应为整数,故当n、P1、P h取不同数值时,可得各类基本杆组。
当P h=0时,杆组中的运动副全部为低副,称为低副杆组。
其F=3n - 2P1 =0,n=2 P1/3 ,故n应当是2的倍数,而P1应当是3的倍数,即n=2、4、6…,P1=3、6、9…。
当n=2,P1=3时,基本杆组称为II级组。
II级组是应用最多的基本杆组,绝大多数的机构均由II级杆组组成,II级杆组可以有图2所示的五种不同类型:图2 平面低副II级基本杆组N=4,P1=6时的基本杆组称为III级杆组。
常见的III级组如图3所示。
图3 平面低副III级基本杆组由上述分析可知:任何平面机构均可以用零自由度的基本杆组依次连接到机架和原动件上的方法而形成。
因此,上述机构的组成原理是机构创新设计拼装的基本原理。
2.杆组的正确拆分杆组正确拆分应参照如下步骤:(1)、正确计算机构的自由度(注意去掉机构中的虚约束和局部自由度),并确定原动件。
(2)、从远离原动件的构件开始拆杆组。
先试拆II级组,若拆不出II级组,再试拆III级组。
即杆组的拆分应从低级别杆组拆分开始,依次向高一组杆拆分。
正确拆分的判别标准:每拆分出一个杆组后,留下的部分仍应是一个与原机构有相同自由度的机构,直至全部杆组拆出只剩下原动件和机架为止。
(3)、确定机构的级别(由拆分出的最高级别杆组而定,如最高级别为II级组,则此机构为II级机构)。
需要说明的是:同一机构所取的原动件不同,有可能成为不同级别的机构。
但当机构的原动件确定后,杆组的拆法是唯一的,即该机构的级别一定。
若机构中含有高副,为研究方便,可根据一定条件将机构的高副以低副来代替(称为“高副低代”),然后再进行杆组拆分。
“高副低代”必须满足的条件:A、代替前后机构的自由度完全相同;B、代替前后机构的瞬时速度和瞬时加速度完全相同;高副低代的方法是:用一个虚拟构件分别与两高副构件在过接触点的曲率中心处以转动副相联;图4 杆组拆分例图(锯木机机构)如图4所示机构,先去掉K处的局部自由度,计算机构的自由度:F=3n- 2P1 - P h=3×8-2×11-1,再进行“高副低代”,即用一个虚拟构件10以回转副分别与滚子中心K、凸轮上的高副接触点P处轮廓的曲率中心K′相连;然后按步骤(2)的拆分原则,拆分出由杆件4与5、2与3、6与7和8与10组成的四个II级杆组,8与10组成的II级杆组即由杆件8组成的单构件高副杆组,最后剩下的是原动件1和机架10,该机构为II级机构。
3.杆组的正确拼装根据事先拟定的机构运动简图,首先进行虚拟拼装,即在软件零件库中选择零部件,点击“装配训练”,按正确装配顺序装配出所构思的机构,点击“运动仿真”,观察机构的运动;然后再利用机构运动参数测试组合创新实验台提供的零件按机构的传递顺序在选定的台架上进行拼装。
拼装时,通常先从原动件开始,按运动传递规律进行拼装。
拼装时,应保证各构件均在相互平行的平面内运动,这样可避免各运动构件之间的干涉,同时保证各构件运动平面与轴的轴线垂直。
拼装应以机架铅垂面为参考平面,由里向外拼装。
完成实物拼装后再启动电机,观察机构的运动情况。
四、实验步骤1、掌握平面机构的组成原理。
2、熟悉本实验中的实验设备,各零、部件功用,安装拆卸工具和测试器件。
3、选定实验机构及其运动方案。
4、正确拼装实验机构。
先是进行虚拟装配、运动仿真,再将各基本杆组按运动传递顺序拼装到台架和原动件上,四个台架中,1号台架上可先后安装正弦机构、等加速-等减速凸轮机构、简谐运动凸轮机构;2号台架上可先后安装齿轮-对心曲柄滑块机构、齿轮-偏置曲柄滑块机构;槽轮机构;3号台架上可先后安装曲柄摆块-齿条齿轮机构、摆块机构、齿轮-曲柄摇杆机构;4号台架上可先后安装摆动导杆-对心滑块机构;摆动导杆-偏置滑块机构;摆动导杆-双摇杆机构。
5、正确安装测试元器件;6、打开计算机,点击“平面机构创意组合测试分析及仿真系统、,完成实验测试内容。
五.系统软件简介系统主界面如图5示。
主界面:系统的主界面如下图所示,可清楚的看到本系统的菜单、快捷按钮、显示窗口三大部分,其中界面正上方有一处标题显示栏,显示当前实验名称,如图5所示为“摆动导杆-偏置滑块机构”实验。
图5 平面机构创意组合测试分析及仿真系统软件主界面5.1程序菜单部分5.1.1文件菜单打开:打开保存的历史实验数据(为*.sav格式)。
界面如图6所示:图6数据另存为:将当前测试自动保存的数据另存于其它处,建议保存在软件所在目录。
文件格式为*.sav,界面如图7所示:图7清除当前实验数据:清空当前实验保存到当前数据表中的实时数据,点击“确定”即执行此操作;点击“取消”则不执行,界面如图8所示:图8清除所有实验数据:清空当前窗体中的所有实验的所有实验数据,操作同上。
界面如图9所示:图9退出:退出本测试软件系统。
5.1.2选择实验菜单选择所需做的实验。
打开“选择实验”菜单,点击某一实验名称即选择此实验为当前实验。
5.1.3参数设置菜单实验参数:如图10所示,为当前实验以各部分实际量为标准参照左边原理图所标示各参数进行参量设置,各参数值单位均为mm(毫米)。
各参数值都设置完成后,点击“存盘”按钮,退出此界面,当前设置生效;若点击“放弃”按钮退出,当前设置无效实验仍使用原有设置。
图10串口配置:设置设备串行口参数,端口设置根据串口与工控机的连接情况设定,若串口插在COM1口就设定为COM1,波特率设定为“57600”,数据位“8”停止位为“1”奇偶校验为“无”。
“存盘”为保存当前设定值并使其生效退出;“放弃存盘”为不保存退出。
界面如图11所示:图11小数位设置:为主窗口显示的实时转速、线位移、线速度、线加速度及角位移、角速度、角加速度的数据设置有效小点位数,注:输入框内请输入正整数,且数值不宜过大以不超过3为宜,界面如图12所示:图12传感器设置:如图13所示,设置位移传感器和角度传感器量程,此项设置必须按各传感器铭牌所标示的量程来设定,否则将影响测试数据。
图13实时曲线:如图14所示,为主界面显示的实时曲线图设置各参数的坐标值。
各参数设置上下限为Y轴坐标值范围,(中点值已默认设置为零,用户不可更改);X轴:X坐标最大显示的时间周期值,单位是“S”即“秒”;曲线粗度:最小值为“1”,设置需为正整数,建议设置为“1”或“2”即可。
注意:每次更改设置后需点击“确定”才能使当前设置生效。
图14通信方式:设置通信协议参数,如图15所示值即为此系统的通信参数值,不可更改,否则将出现通信不成功状况。
图155.1.4机构演示菜单演示当前实验:以短片的形式演示当前平面机构实验。
如图16所示:图16演示其他实验:点击,在展开的下一级菜单中选择需演示的平面机构实验,使其以短片的形式演示出来。
5.1.5实验分析菜单开始:开始进行实验,并采样。
停止:停止实验进行及采样。
曲线选项:设置绘制曲线参数,界面如图17到图19所示:图17图18图19此项中,所有关颜色的设置如:基本参数面板中背景颜色、X/Y轴颜色等均可使用系统默认也可点击颜色框右边的按钮,将弹出颜色选项面板由用户自行定义。
基本参数面板:在标题栏中的内容中输入绘制的曲线标题名称;标注栏中选中一选项其对应的信息在曲线绘制的标注栏中显示,否则不显示;网格线可选择其类型并可选中“显示”即在坐标中显示网格线,否则隐藏。
曲线面板:在左显示框中选中Y轴数据项,再选中“曲线显示”即对应的曲线将在绘制曲线中显示,相反则否;可选择轨迹宽度和插补类型、采样点尺寸及是否突出显示。
坐标轴面板:为相应的Y轴参数定义其最小值和范围,可手动或自动等;选择X轴(时间轴)数据,其最小值和范围可手动或自动;所有X轴、Y轴参数的单位同实时曲线。
注意:每次更改设置后需点击“确定”才能使当前设置生效。
绘制曲线:根据曲线选项中的设置及当前实时数据表中保存的数据绘制当前实验的曲线,以供分析、对比,并可打印。
5.1.6实验报告菜单此菜单为浏览、打印实验报告提供。
选择查看和导出实验报告,将弹出如图20所示对话框,选择“是”将打印相应的实验和选择的保存的图像,如图21所示为一摆动导杆-偏置滑块机构的有图像实验报告。
图20图21当前实验报告:如上所述,浏览当前实验报告,并可进行打印等操作。
其他实验报告:如上所述,可逐一浏览各实验的实验报告,并可进行打印等操作。
5.1.7帮助菜单关于:显示本软件名称及版本信息。
帮助:弹出系统使用帮助文档。
联络我们:显示本公司及售后服务联系方式。