电动汽车四轮独立驱动技术综述
全时四轮驱动技术论文
汽车四轮驱动技术【摘要】四轮独立驱动技术可使电动汽车底盘实现电子化,主动化,大大提高电动汽车的性能。
电动汽车四轮独立驱动系统是利用四个独立控制的电动机分别驱动汽车的四个车轮,车轮之间没有机械传动环节。
四轮驱动技术比传统驱动技术更有明显的的优势,此技术将来会更有力的运用。
为了更进一步了解全时四轮驱动技术,逐一的把四驱技术和传统驱动优缺点对比:1.传动系统得到减化,整车质量大大减轻。
由电动机直接驱动车轮甚至两者集成为一体。
2.与传统汽车相比,四轮独立驱动系统可通过电动机来完成驱动力的控制而不需要其他附件,容易实现性能更好的、成本更低的牵引力控制系统(TCS)、防抱死制动系统(ABS)及动力学控制系统(VDC)。
3.对各车轮采用制动能量回收系统,则可大大提高汽车能量利用效率,且与采用单电动机驱动的电动汽车相比,其能量回收效率也获得显著增加。
这对提高电动汽车续驶里程是很重要的。
4.实现汽车底盘系统的电子化、主动化。
【关键词】四轮驱动技术特点优势独立底盘- 1 -Auto four-wheel drive technology【Abstract】Four-wheel independent drive technology can make the electric automobile chassis realization of e-government, active, greatly improving the performance of the electric vehicle. Electric vehicle four-wheel independent drive system is by four independent control of motor respectively drive the car four wheels, no mechanical transmission links between the wheels. Four-wheel drive technology than traditional drive technology is more obvious advantages, this technology in the future will be more powerful application. To further understand full-time four-wheel drive technology, each of the raider technology and traditional drive advantages and disadvantages compared:1. The transmission systems have simplify, complete quality greatly relieved. Directly driven by motor wheels or are even integrated into one.Compared with the traditional automobile 2, four-wheel independent drive system can be accomplished by motor driving control and do not need other attachments, easy to achieve better performance, cost lower traction control system (TCS), ABS (ABS) and dynamic control system (VDC).3. For each wheel adopts braking energy recovery system, it can greatly improve the car energy utilization efficiency, and by a single motor drives electric vehicle compared to the energy recovery efficiency also obtain increased significantly. To improve the electric car onward travel distance is very important.4. Realize automobile chassis system of electronic, active glycosylated. Hyundai motor drive system arrangement is divided into front drive, after driving or whole driver.【Keywords】Four-wheel Drive technical Features advantages Independent Chassis【目录】第一章绪论 (4)1.1 四轮驱动的发展 (4)1.2 四驱的不利因素 (4)第二章全时四轮驱动技术 (5)2.2四轮驱动工作原理及其组件分析 (6)第三章汽车驱动形式 (9)3.1 汽车驱动形式各分类 (9)3.1.1 前置前驱特点及分析 (9)3.1.2 前置后驱特点及分析 (9)3.1.3 中置后驱特点及分析 (10)3.1.4 后置后驱特点及分析 (10)3.1.5 四轮驱动特点及分析 (11)第四章四轮驱动系统分类及对称 (12)4.1 四轮驱动分类 (12)4.1.1 用途分类 (12)4.1.2 分动器分类 (12)4.2 左右对称全时四轮驱动系统 (12)第五章结论 (14)参考文献: (15)致谢 (16)第一章绪论1.1 四轮驱动的发展四轮驱动最早应用于第一次世界大战的军事用车,很快这项技术在二战期间美国军事车吉普上得到广泛使用。
四轮独立驱动电动汽车的电子系统研究
四轮独立驱动电动汽车的电子系统研究一、概述随着科技的飞速发展和人们对环保出行的日益关注,电动汽车作为新能源汽车的代表,逐渐成为了未来汽车产业的发展趋势。
四轮独立驱动电动汽车,作为一种创新的电动汽车类型,以其独特的驱动方式和优秀的性能表现,受到了广泛的关注和研究。
四轮独立驱动电动汽车的核心在于其电子系统,该系统集成了先进的电机控制、能量管理、车辆稳定性控制等多项技术,为车辆提供了高效、稳定且安全的动力输出。
对四轮独立驱动电动汽车的电子系统进行深入研究,不仅有助于提升车辆的性能和品质,还能够推动电动汽车技术的进一步发展。
本文旨在全面探讨四轮独立驱动电动汽车的电子系统,包括其结构组成、工作原理、控制策略以及在实际应用中的表现等方面。
通过深入研究和分析,以期为解决当前电动汽车领域面临的挑战和问题提供有益的参考和启示。
同时,本文还将关注电子系统的创新点和发展趋势,为电动汽车产业的可持续发展贡献力量。
1. 四轮独立驱动电动汽车的发展背景及意义随着全球能源结构的转型和环境保护意识的日益增强,电动汽车作为新能源汽车的代表,正逐渐取代传统燃油汽车,成为汽车工业发展的主流趋势。
四轮独立驱动电动汽车以其独特的驱动方式和优越的性能,成为了当前研究的热点。
四轮独立驱动电动汽车,即每个车轮都配备独立的驱动电机,通过电子控制系统实现对各车轮的精确控制。
这种驱动方式不仅简化了汽车的传动系统,提高了传动效率,而且能够实时调整各车轮的驱动力和制动力,从而优化车辆的操控性能和行驶稳定性。
从发展背景来看,四轮独立驱动电动汽车的兴起,既是汽车工业技术进步的必然结果,也是应对能源危机和环境污染挑战的重要举措。
随着电池技术的不断进步和电机控制技术的日益成熟,四轮独立驱动电动汽车的续航里程和性能得到了显著提升,使得其商业化应用成为可能。
从意义上看,四轮独立驱动电动汽车的研究和推广,对于推动汽车工业的绿色发展和可持续发展具有重要意义。
它能够有效降低汽车对石油资源的依赖,减少尾气排放,从而缓解能源危机和环境污染问题。
四轮毂独立驱动电动汽车协调控制技术综述
文章编号 : 1 0 0 9— 3 1 5 X( 2 0 1 4 ) 0 1— 0 0 2 9— 0 6
四轮 毂 独 立 驱 动 电动 汽 车 协 调 控 制 技 术 综 述
徐 国凯 ,葛平淑 , 王 娟 , 韩桂英
( 大连 民族学院 a . 机电信息S - 程学院; b . 信息与通信S - 程学院, 辽 宁 大连 1 1 6 6 0 5 )
方 面 的独 特优势 和 巨大发 展 潜力 成 为 电动 汽 车研 发 的一 个 重要方 向 。
制等方面, 在充分利用 四轮毂独立驱动的特点以 改善 整 车动力 学特 性和 操纵 稳 定性 方 面 的研 究起 步较 晚 ] , 而这 方 面 的研 究 将 决 定 电动 汽 车 的行
驶安 全性 , 是 制 约 轮 毂 驱 动 电 动 汽 车发 展 的关 键
摘 要: 对 四轮毂独立驱动 电动汽车 的协调控制技术 进行综述 , 重点 介绍 了多 目标之 间 的协 调控制 以及
四轮转矩协调控制 的研究 方法 以及 国内外研究现状 , 提 出了当前 存在 的一些 问题 , 展 望 了今 后 的发 展趋 势。 关键词 : 电动汽车 ;四轮 毂驱 动 ; 协调控制
i n t h e r e s e a r c h w e r e p u t f o r w a r d a n d t h e d e v e l o p me n t t r e n d i n t h e f u t u r e w a s p r o s p e c t e d .
w a s r e v i e w e d .Mu l t i —o b j e c t i v e c o o r d i n a t i o n c o n t r o l a n d t o r q u e c o o r d i n a t i o n c o n t r o l r e s e a r c h
四轮独立驱动独立转向电动汽车悬架和转向机构设计本科生毕业论文
3.更具我们的结构特点,选用了双横臂弹簧减震悬架机构。简易的选择了控制臂的空间位置形式,并根据经验设计了控制臂的尺寸,校验了连接点的强度。计算并选择了合适的液压阻尼器和螺旋弹簧。
关键字:四轮独立四轮转向轮毂电机驱动轮边线控转向双横臂悬架螺栓弹簧液压减震
1.1
电动汽车四轮独立驱动系统是利用四个独立控制的电动机分别驱动汽车的四个车轮,车轮之间没有机械传动环节。典型四轮驱动布置型式,其电动机与车轮之间可以是轴式联接也可以将电动机嵌入车轮成为轮式电机,车轮一般带有轮边减速器。这种驱动系统与传统汽车驱动系统相比有以下特点:
1)传动系统得到减化,整车质量大大减轻。由电动机直接驱动车轮甚至两者集成为一体。这样省掉了离合器、变速器及传动轴等传动环节,传动效率得到提高,也更便于实现机电一体化。另外,由于动力传动的中间环节减少,传动系的振动及噪声得到改善。甚至在采用纯电力驱动时,可实现无声行驶。但是,在实际实际交通环境中无声行驶,带来的很多问题,在汽车系统没有实现完全的智能化前,带来的往往祸大于福。
1.2
在一般汽车,以操纵方向盘使前轮的轮胎转向发挥转弯机能,但四轮转向是后轮的轮胎也可转向之系统。四轮转向的目的:在低速行驶时作逆相转向(前轮与旋转方向为逆向)使旋转时小转弯性能良好,中高速时为同相转向(前轮与旋转方向为同方向),以提高在高速时之车道变换或旋转时操纵稳定性。
1)四轮转向降低低速转向半径。
如图1-1a所示,汽车在低速旋转时,车辆行进方向与轮胎方向大概可视为一致,在各轮大部份不会产生旋转向心力(cornering force )。四轮行进方向的垂直线会交于一点,车辆就以该点为中心(旋转中心)旋转。参考下图低速旋转时之行车轨迹,单轴转向车(通常前轮转向)时,因为后轮不转向,旋转中心差不多在后轴的延长线上。
四轮独立电机驱动线控电动汽车的技术浅析
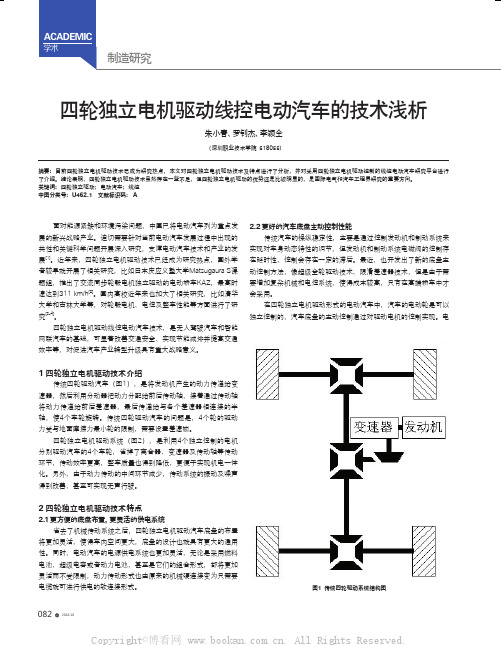
图3 四轮独立电机驱动线控电动汽车的实物图
4 结束语
当然,四轮独立电机驱动技术也有其不足之处。
第一,如果驱动电机采用轮毂电机,增大了非簧载质量,这会对整车的操控产生一定的不利影响;第二,虽然电子制动可以实现能量回收,但是其制动能力有限,所以仍需要有液压制动系统,因为没有了内燃机,需要附加电动真空泵,这也增加了电量的消耗。
但是,四轮独立电机驱动的优势还是比较明显的,也被认为是电动汽车的最终驱动形式。
因此,高质量的四轮独立电机驱动产品及其控制系统,已经是国际电气和汽车工程界研究的重要方向。
基金项目:2018年广东大学生科技创新培育专项资金(攀登计划专项资金pd jha0852):线控电动汽车的驱动转向电机一体化控制器研究。
深圳市知识创新计划基础研究项目(JCYJ20170818114754288):基于模糊控制的轮毂电机驱动电动汽车线控电液复合制动控制策略研究。
【参考文献】
[1]郭春林,甄子健,武力,等.电动汽车发展前景与关键因素分析[J].汽车工
程,2012,Vol,34(9):852-858.
[2]Matsugaura S,Kawakami K,Shimizu H.Evaluation of Performances for the
In-Wheel Drive System for the New Concept Electric Vehicle “KAZ”[C].。
四轮独立驱动轮毂电机电动汽车研究综述

中图分类号:U 4 6 9 . 7 2
文献标识码 :B
文章编号:1 6 7 4 - 3 2 6 1 ( 2 0 1 4 ) 0 1 - 0 0 4 8 - 0 6
Re v i e w o n El e c t r i c Ve h i c l e wi t h Fo u r - wh e e l I n d e p e n d e n t Dr i v e I n - wh e e l Mo t o r s
a b r o a d wa s s t a t e d .At l a s t .i t p o i n t e d o u t t h a t t h e o r e t i c a l s t u d y a n d p r a c t i c a l e x p l o r a t i o n a r e f u r t h e r n e e d e d i n s ab t i l i t y c o n t r o l ,u rb a n c o n d i t i o n s e n e r g y c o n t r o l f r o m t h e p r o d u c t i z a t i o n a s p e c t a n d t h e i n t e l l i g e t n c o n t r o l b a s e d o n ri d v e r c h a r a c t e r i s t i c s . wh i c h i S a n i mp o r t a n t ir d e c t i o n i n ut f u r e r e s e a r c h .
V o 1 3 4 , No . 1 F e b . 2 01 4
基于再生制动的四轮毂电机独立驱动电动汽车差速转向控制研究
基于再生制动的四轮毂电机独立驱动电动汽车差速转向控制研究随着科技的不断发展,汽车的技术也在不断地更新换代。
电动汽车成为新一代汽车的主要发展方向,再生制动技术也成为电动汽车行业的重要技术之一。
针对传统的四轮驱动电动汽车,研究者们提出了采用四轮毂电机独立驱动的电动汽车,借助再生制动技术实现差速转向控制。
四轮毂电机独立驱动的电动汽车是指将电动汽车的驱动电机集成到车轮中,即为每个车轮都安装一台电机,使得每个车轮都能够独立驱动。
这种结构有助于提高车辆的能量利用效率和功率输出效率,同时也能够提高汽车的马力和加速性能。
再生制动技术是指将汽车制动时产生的能量通过电机转化为电能储存起来,在车辆行驶时供电使用。
再生制动技术可以降低车辆的能量浪费,从而提高车辆的续航里程。
再生制动技术对于四轮毂电机独立驱动的电动汽车来说,也是非常重要的。
由于每个车轮都有独立的电机,因此可以对每个车轮的电机进行独立的再生制动控制,从而提高制动能效并减少电池的充电时间。
此外,再生制动技术还可以用于差速转向控制。
在传统的汽车中,差速器起到了平衡左右车轮输出扭矩的作用,但在电动汽车中,由于每个车轮都有独立的电机驱动,因此可以通过控制每个车轮的输出扭矩实现差速转向控制。
通过再生制动技术的应用,可以实现差速转向控制并减少能量浪费,从而提高汽车的性能和续航里程。
四轮毂电机独立驱动的电动汽车结合再生制动技术可以改变传统汽车转向机构的复杂性,提高驾驶操控性能和安全性。
综上所述,再生制动技术和四轮毂电机独立驱动技术在电动汽车领域都是非常重要的技术。
它们可以提高汽车的能源利用效率和驾驶性能,同时也可以减少能量浪费和提高续航里程。
在未来的发展中,这两项技术将持续发挥重要作用,推动电动汽车技术不断进步。
四轮毂电机独立驱动的电动汽车结合再生制动技术可以实现智能化控制,提高车辆的安全性和驾驶舒适性。
通过传感器对车辆的速度、方向、加速度等数据进行实时监测和反馈,可以对每个车轮的输出扭矩进行精确控制,从而实现更加灵活、稳定和安全的驾驶体验。
电动汽车四轮独立驱动技术

电动汽车四轮独立驱动技术电动汽车四轮独立驱动技术第一章:绪论1.1 引言内燃机汽车自20世纪初出现至今,在其自身随人类科技的进步经历了巨大的变的过程中也给人类生活和生产带来了巨大方便,为人类社会的进步做出了巨大的贡献,但其消耗日益紧缺的石油并产生大量污染物也使人类赖以生存的环境恶化。
因此近年来由于环境恶化及能源紧张等问题,迫切需要开发低能耗,无污染的汽车。
因此,电动汽车成为21世纪汽车技术研究的热点。
混合动力汽车与纯电动汽车是电动汽车研究的两个分支。
经过近些年的发展,电动汽车技术日趋成熟,部分产品已进入商业化应用如Toyota Prius。
目前,电动汽车传动系统多数在传统内燃机汽车的传动系基础上进行一些改变,进而将电动机及电池等部件加入总布置中。
这种布置难以充分发挥电动汽车的优势。
为使电动汽车对传统内燃机汽车形成更大的竞争优势,设计出适合电动汽车的底盘系统势在必行。
而四轮独立驱动技术则可使电动汽车底盘实现电子化,主动化,大大提高电动汽车的性能。
使电动汽车与传统汽车相比具有更强的竞争力。
1.2 四轮独立驱动技术的特点电动汽车四轮独立驱动系统是利用四个独立控制的电动机分别驱动汽车的四个车轮,车轮之间没有机械传动环节。
其电动机与车轮之间可以是轴式联接也可以将电动机嵌入车轮成为轮式电机,车轮一般带有轮边减速器。
这种驱动系统与传统汽车驱动系统相比有以下特点:(一)传动系统得到减化,整车质量大大减轻。
由电动机直接驱动车轮甚至两者集成为一体。
这样省掉了离合器、变速器及传动轴等传动环节,传动效率得到提高,也更便于实现机电一体化。
传动系质量在汽车整车质量中占有很大比重,机械传动系的消失,使汽车很好的实现了轻量化目标。
另外,由于动力传动的中间环节减少,传动系的振动及噪声得到改善。
甚至在采用纯电力驱动时,可实现无声行驶。
这是美国海军的"RST-V"侦察车及其新一代军用"悍马"汽车采用四轮独立驱动技术的重要原因。
四轮独立驱动转向电动车传动及制动系统设计本科生毕业论文

四轮独立驱动转向电动车传动及制动系统设计本科生毕业论文一、内容简述本文旨在设计一款四轮独立驱动转向电动车的传动及制动系统。
研究内容包括电动车的设计背景与意义,对于四轮独立驱动转向电动车的工作原理与现状的深入分析,以及针对其传动系统和制动系统的具体设计。
研究目的在于提高电动车的性能、安全性和稳定性,以适应现代城市环境和用户需求。
首先本文将概述电动车传动系统的设计思路与方案,这包括电机的选择及其布局设计,传动系统的结构设计,以及传动效率的优化等。
通过选择合适的电机类型和布局方式,以实现四轮独立驱动转向的功能,提高车辆的灵活性和稳定性。
同时对传动系统进行优化设计,以提高传动效率,确保车辆的动力性能和经济性能。
其次本文将详细介绍电动车制动系统的设计,制动系统是保证车辆安全的关键部分。
本文将分析制动系统的设计要求,包括制动性能、制动稳定性、制动安全性等方面。
将探讨不同类型的制动系统(如液压制动、再生制动等)在四轮独立驱动转向电动车中的应用,并进行对比分析,以确定最佳的制动系统设计方案。
本文将探讨该设计的优化策略和未来发展方向,将分析现有设计方案的优缺点,并提出改进意见。
同时结合当前技术的发展趋势和市场需求,对四轮独立驱动转向电动车的传动及制动系统的未来发展方向进行展望。
这将有助于推动电动车技术的发展,提高电动车的性能和安全性,为未来的智能交通和绿色出行做出贡献。
1. 研究背景和意义随着科技的不断进步和环保理念的深入人心,电动车作为一种绿色、高效的交通工具在全球范围内得到了广泛的关注和应用。
四轮独立驱动转向电动车作为电动车的一种新型发展形式,其灵活性和适应性使其在多种复杂环境和特殊应用场景中具有显著优势。
特别是在自动驾驶技术日益成熟的背景下,四轮独立驱动转向技术成为了研究的热点。
它不仅在军事领域有重要作用,在民用领域如自动驾驶汽车、智能物流、应急救援等领域也具有广阔的应用前景。
因此对于四轮独立驱动转向电动车传动及制动系统的研究显得尤为重要。
四轮独立驱动纯电动汽车驱动防滑控制

江苏省汽车工 程学 会“ 2 0 1 3 新能源汽车 技术与发展研讨会” 优秀 论文 3
四轮独立驱动纯电动汽车驱动防滑控制
殷 国栋 王善豹 王金 湘 陈 南
( 东 南 大学机 械 工程 学院 )
摘
要
本 文研 究 四轮 独 立驱 动 ( 4 WI D) 纯 电动 汽 车 的驱动 防 滑 ( A S K) , 提 出基 于
=
・
( 丢 M g + M a y 导 ) { 一 号 M a x 旱
和负载转 矩 。
÷ [ ] r e - B  ̄ o  ̄ - T 1 ]
( 8 )
式 中,i 为( 1 , 2 , 3 , 4) , 分别为 f l , f r , r l , r r ; M 为
式 中, B , J ' T 1 分 别 为粘 滞 摩擦 系 数 , 转 动惯 量
前 言
随着环境污染及能源短缺的 日益加剧 , 电动 汽车技术受到 了政府及科技界越来越多 的重视 , 电动汽车技术的研究也成为了国内外研究 的热点
[ 1 _ 2 】
,
控制车轮驱动轮打滑 ,从而将滑转率控制在合理
范 围内 。
本文 针对 四轮 驱动 轮毂 电机 电 动汽 车驱 动 防 滑 问题 ,提 出了一 种根 据实 际角 加速 度 与 门限角
整车质量 ; m为 l / 4 整车质量 ; u为车速 ; 为第 i 个车轮的驱动力 ; F 击 为阻力 ; j 为车轮转动惯量 ; W i 为第 i 个车轮 的角速度 ; 为 电机的驱动力矩; f 为滚动摩擦 系数 ; R为车轮半径 ; 为第 i 个车
取状态变量 为 x = i , x = ∞ 电机控制 中迫使 i = 0 , 即I l J : , 得电机模型状态空间表达式为:
电动汽车多电机独立驱动技术研究综述

电动汽车多电机独立驱动技术研究综述随着环境保护意识的提高以及传统燃油汽车的污染问题日益凸显,电动汽车逐渐成为了未来汽车发展的方向。
其中,多电机独立驱动技术是电动汽车领域的一项重要技术,其成功应用将会在电动汽车的动力系统、稳定性和安全性等方面得到极大提升,本文将对该技术进行简要的介绍和阐述。
多电机独立驱动技术是指在电动汽车的动力系统中,采用多个电机单元同时对汽车的不同部位进行驱动,以实现更为精确、快速的发力响应、更为灵活的转弯控制以及更高的能效性。
在该技术中,每一个电机单元都独立工作,并且可以实现不同转速的控制,从而在行驶过程中充分发挥多个电机的联合优势,提高电动汽车的整体性能。
多电机独立驱动技术具有以下几个优势。
首先,在汽车的动力传递方面,多电机独立驱动技术可以充分实现前后轴的动力分配和调整,以满足车辆在不同路况和不同地形下的动力需求,从而获得更好的加速性、提高车辆通过性;其次,多电机独立驱动技术在转向方面也具有很大优势,可以实现更为灵活的转弯控制,从而提高驾驶安全性;再次,多电机独立驱动技术对于节能环保方面具有很大的作用,可以充分利用能量回馈和电机控制等技术优势,降低能量消耗并减少对环境的影响。
随着技术的不断发展和市场需求的增加,多电机独立驱动技术也得到了广泛的应用和研究。
目前,世界范围内的诸多著名汽车品牌已经开始推出多电机独立驱动技术的电动汽车产品,并且通过一系列实验和模拟,也已经证实了该技术的优越性能。
总的来说,多电机独立驱动技术具有很大的应用前景,可以充分满足电动汽车多样化的动力、操控、舒适性和节能环保等要求,是电动汽车发展的一个重要方向。
但同时,也需要进一步深入研究和探索,克服技术上的难题和困难,不断提高技术成熟度和实用性,以满足当代和未来市场的需求。
尽管多电机独立驱动技术在未来的汽车发展中带来巨大的潜力,但其应用依然面临着一些挑战。
首先,随着电动汽车的电量管理、冷却和散热等问题逐渐加剧,多电机独立驱动技术需要进一步研究和探索,制定更加完善的电池管理策略以及更加高效的冷却和散热技术。
后轮独立驱动电动汽车四轮转向系统的研究
后轮独立驱动电动汽车四轮转向系统的研究后轮独立驱动电动汽车再研究后可以实现四轮转向,其中前轮和后轮转向可以经过差速转向和常规转向实现。
确立了动力学模型,将常规的四轮转向汽车用作参考模型,并且将PID控制器设计为捕获驱动后轮转向所需要的的差动转矩,仿真效果表明,差速转向可以实现后轮转向。
标签:后轮独立驱动;四轮转向系统;电动汽车根据电机的类型,独立驱动器可以分为轮侧电机驱动器和轮毂电机驱动器。
驱动和传动都集成到轮毂电机驱动汽车的轮毂中,这大大简化了车辆的机械结构并提升了车辆的空间使用效率。
差动转向技术是使车辆能够通过控制两侧独立驱动车轮的驱动力矩来实现转向的新技术。
独立的后轮驱动与差动转向技术相结合,不仅有效提高了低速行驶时的机动性,而且还有效地降低了高速行驶时的甩尾和侧滑现象,此外,可以主动提升汽车的操纵稳定性和安全性。
一、车辆模型目前国内外大学和研究机构研究和开发的热点是四轮独立驱动电动汽车。
四轮独立驱动电动汽车可独立控制四轮驱动力矩,转矩和速度可轻松测量,这对车辆控制非常有利。
汽车的四轮转向控制是主动安全控制的重要研究内容之一,因为它可以有效地减小车辆的转向半径并提高转向稳定性,四轮独立驱动电动汽车具有四轮转向功能是车辆主动安全控制的理想载体。
本文研究的传统转向后轮独立驱动差速转向车辆可以被认为是一个具有一个车身和两个后轮的系统,仅忽略车辆沿y轴的横向运动和绕z轴的横摆运动,而不考虑悬架对车身运动的影响,偏侧特性在线性范围内。
还研究了四轮转向控制策略,使用CarSim与Matlab/Simulink建立了车辆模型和控制策略,并进行了仿真测试。
内燃机模型是CarSim中的车辆模型,并且该模型已修改为四轮独立驱动电动汽车模型。
Simulink用于构建四轮驱动力分配器和四轮角分配器,四轮驱动力分配装置通过基于驾驶员的目标速度和实际车辆的反馈速度来计算车辆所需的总目标驱动转矩来分配四轮驱动转矩,四轮角分配器根据驾驶员的方向盘角度计算并分配四轮角大小,四轮转角控制基于阿克曼的转角控制原理。
汽车四轮驱动技术的研究分析(doc 30页)
汽车四轮驱动技术的研究分析(doc 30页)摘要四轮驱动技术比传统驱动技术更有明显的的优势,此技术将来会更有力的运用。
为了更进一步了解全时四轮驱动技术,逐一的把四驱技术和传统驱动优缺点对比: 1.传动系统得到减化,整车质量大大减轻。
由电动机直接驱动车轮甚至两者集成为一体。
2.与传统汽车相比,四轮独立驱动系统可通过电动机来完成驱动力的控制而不需要其他附件,容易实现性能更好的、成本更低的牵引力控制系统(TCS)、防抱死制动系统(ABS)及动力学控制系统(VDC)。
3.对各车轮采用制动能量回收系统,则可大大提高汽车能量利用效率,且与采用电动机驱动的电动汽车相比,其能量回收效率也获得显著增加。
这对提高电动汽车续里程是很重要的。
4.实现汽车底盘系统的电子化、主动化。
【关键词】四轮驱动技术优势独立底盘定位AbstractFour-wheel drive technology than traditional drive technology is more obvious advantages, this technology in the future will be more powerful application. To further understand full-time four-wheel drive technology, each of the raider technology and traditional drive advantages and disadvantages compared:1 .The transmission systems have simplify, complete quality greatly relieved. Directly driven by motor wheels or are even integrated into one. Compared with the traditional automobile2, four-wheel independent drive system can be accomplished by motor driving control and do not need other attachments, easy to achieve better performance, cost lower traction control system (TCS), ABS (ABS) and dynamic control system (VDC).3 .For each wheel adopts braking energy recovery system, it can greatly improve the car energy utilization efficiency, and by a single motor drives electric vehicle compared to the energy recovery efficiency also obtain increased significantly. To improve the electric car onward travel distance is very important.4. Realization of auto chassis system electronic, automation. [Keywords] Four-wheel,Features advantages,Independent,Chassis,Location、第一章绪论1.1四轮驱动的发展四轮驱动技术最早出现在1903年,最初是在卡车上采用,后来才逐渐被引入一般轿车。
全线控四轮独立转向驱动制动电动汽车动力学集成控制研究
全线控四轮独立转向驱动制动电动汽车动力学集成控制研究一、本文概述随着电动汽车技术的快速发展,车辆动力学集成控制已成为提高车辆行驶稳定性、安全性及能效的关键。
特别是针对全线控四轮独立转向驱动制动电动汽车,其动力学特性与传统车辆存在显著差异,开展对其动力学集成控制的研究具有重要意义。
本文旨在深入探讨全线控四轮独立转向驱动制动电动汽车的动力学特性,分析其转向、驱动和制动系统的协同工作机理,研究相应的集成控制策略,以实现车辆在各种工况下的最优性能。
本文将对全线控四轮独立转向驱动制动电动汽车的基本结构和工作原理进行介绍,阐述其与传统车辆在动力学方面的主要差异。
分析车辆在转向、驱动和制动过程中的动力学行为,建立相应的数学模型,为后续控制策略的研究提供理论基础。
接着,本文将重点研究车辆的动力学集成控制策略,包括转向、驱动和制动系统之间的协同优化,以及基于多传感器信息融合的车辆状态感知与决策算法。
通过仿真分析和实车试验验证所提控制策略的有效性,为全线控四轮独立转向驱动制动电动汽车的实际应用提供理论支撑和技术指导。
本文的研究不仅对提升电动汽车的动力学性能具有重要意义,同时也为车辆动力学集成控制领域的发展提供新的思路和方法。
二、全线控四轮独立转向驱动制动电动汽车概述随着科技的进步和新能源汽车的快速发展,全线控四轮独立转向驱动制动电动汽车(Fully Actuated Four-Wheel Independent Steering, Driving, and Braking Electric Vehicle,简称FAFWIDBEV)作为一种新型的电动汽车技术,正受到越来越多的关注和研究。
这种电动汽车突破了传统汽车的设计框架,通过先进的控制系统和算法,实现了四轮独立转向、驱动和制动,从而极大地提高了车辆的动力性、操纵稳定性和安全性。
全线控四轮独立转向技术允许车辆的四个车轮各自独立地进行转向操作,不再局限于传统的前轮转向或四轮同向转向的模式。
电动汽车多电机独立驱动技术研究综述_张多

3 电子差速研究
传统汽车依靠行星轮的自转实现左、右车轮转向时 的差速行驶,而多电机独立驱动电动汽车则必须采用电 子差速系统实现各轮的转速协调,以保证转向时各车轮 不发生拖动或滑移,实现差速行驶,保证电动汽车转向 的稳定性。
根据驱动电机被控变量的不同,多电机驱动电动汽
-2-
车的电子差速系统分为以下 2 类。
【Abstract】The four-wheel-independent-drive (4WID) electric vehicles (EVs) have become one of the most important trends for EVs. However, it suffers from the problems of the multi-motor coordinated control and reliability. In this paper, the research on the electric differential, active safety control, multi-motor coordinated control and fault tolerant control are reviewed. Finally, some problems existing in 4WID electric vehicle are pointed out, and the developing direction and trend of the 4WID technology is investigated.
后轮独立控制的四轮转向系统研究

后轮独立控制的四轮转向系统研究随着科技的不断发展,汽车工业也在不断寻求创新和突破。
后轮独立控制的四轮转向系统作为一种新型的汽车转向系统,具有较高的机动性和稳定性,受到了广泛的。
本文将围绕后轮独立控制的四轮转向系统展开研究,介绍其研究背景、现状以及未来发展趋势。
后轮独立控制的四轮转向系统是指汽车前后轮分别由独立的控制系统进行控制,从而实现更加灵活和稳定的转向性能。
这种系统的出现可以追溯到20世纪末期,当时主要是为了解决车辆在复杂道路条件下的操控问题。
随着技术的不断进步,后轮独立控制的四轮转向系统逐渐成为研究的热点,并在部分高档汽车中得到了应用。
目前,国内外对于后轮独立控制的四轮转向系统的研究已经取得了一定的成果。
在理论研究方面,学者们通过建立数学模型和进行仿真实验,对后轮独立控制的四轮转向系统的动力学特性、控制策略等方面进行了深入研究。
在实践应用方面,部分汽车制造商已经将后轮独立控制的四轮转向系统应用于高档汽车中,并得到了良好的市场反馈。
然而,目前研究中还存在一些问题和难点。
后轮独立控制的四轮转向系统的成本较高,对于普及应用具有一定的难度。
系统的稳定性和可靠性还需要进一步提高。
针对不同车型和不同使用场景,后轮独立控制的四轮转向系统的优化和控制策略还需要进一步完善。
随着人工智能、传感器等技术的不断发展,后轮独立控制的四轮转向系统的未来发展前景十分广阔。
未来研究重点和方向可能包括以下几个方面:控制策略优化:针对不同车型和应用场景,研究更加高效和智能的控制策略,以提高车辆的操控性能和稳定性。
传感器技术应用:利用新型传感器技术,如激光雷达、高清摄像头等,实现对车辆周围环境的实时感知和信息采集,为车辆的自主控制提供更加准确和可靠的信息支持。
车辆动力学仿真与优化:通过建立更加精确的车辆动力学模型,对车辆的动态性能进行仿真和分析,以优化车辆的结构设计、控制系统等各方面因素。
智能化与自动驾驶:结合人工智能、机器学习等技术,研究更加智能化和自动化的车辆控制系统,提高车辆的自主行驶能力,实现部分或完全自动驾驶。
电动汽车四轮独立驱动技术综述
电动汽车四轮独立驱动技术综述摘要:在能源与环境的双重压力下,电驱动车辆已经成为当前汽车工业的发展趋势,其中四轮独立驱动技术更是成为当前相关领域的研究热点。
通过对电动汽车四轮独立驱动技术领域的关键技术的描述,如电动轮驱动电机及驱动系统、电子差速控制技术、整车控制技术进行分析,了解和深化对电动汽车的认识。
关键词:电动汽车,驱动电机,电子差速控制,整车控制0引言随着能源问题的突显和人们环境保护意识的加强,混合动力汽车(HEV)、燃料电池汽车(FCEV)、纯电动汽车(EV)等新能源汽车已经开始受到越来越多的关注。
在这种大背景下,具有无污染、零排放特点的纯电动汽车被公认为是最具有发展前途的交通工具之一[1]。
以驱动电机为原动机的电动汽车,在驱动形式的多样性上有较大优势。
其中,把电机直接安装在轮毂上,对整车进行驱动的四驱动方式称为四轮独立驱动(Four-wheel Independent Drive),简称4WD,因其简洁的整车结构、高效传动、以及能借助微控制器实时控制技术直接控制各电动轮实现差速转向和驱动防滑等突出优点,成为电动汽车发展的一个独特方向[2]。
目前率先进入到商业运行的电动车辆多是在传统内燃机汽车底盘结构上进行改造,以中置电机取代发动机作为车辆动力源。
由于机械传动系统结构未发生改变,这种形式电动车辆难以充分发挥电机驱动应有的各种技术优势。
随着电机技术的发展和线控技术的应用,以轮毂电机为驱动系统的底盘结构成为电动汽车新的发展方向[3]。
本文通过对电动汽车四轮独立驱动技术领域的关键技术的描述,如电动轮驱动电机及驱动系统、电子差速控制技术、整车控制技术,了解和深化对电动汽车的认识。
1国内外研究现状1.1国外电动汽车研究现状轮毂电机车辆平台自身具有的线传控制特征,使整车布置和控制系统设计具有很大的柔性,这些优势得到了各国汽车厂商和研发机构的认同并都展开了相关的研究。
不过受到安全法规的限制,现在与整车安全相关的线控技术还无法应用到量产车型当中。
四电机驱动技术解析及电驱和新能源汽车的新发展形势

四电机驱动技术解析及电驱和新能源汽车的新发展形势01四电机驱动技术解析四电机驱动分为三种形态:集成式四电机驱动、轮边式四电机驱动和轮毂式四电机驱动,其中轮毂式四电机驱动又可分为内转子式和外转子式。
比亚迪“易四方”平台属于集成式四电机驱动范畴。
各类四电机驱动架构示意图生理信集成式四电机驱动:四电机驱动的初级形态号的内容技术原理:前后两组驱动系统未能实现横向机械解耦,前驱动系统和后驱动系统分别由两个电机集成在一起,通过减速器减速增扭后,与传动轴连接,可独立控制车轮。
相比传统双电机四驱,取消差速器,轮间转速差和动力分配可控制电机自由调节。
技术难点:电机协同控制是首要难题。
四个高转速电机独立驱动四个车轮,考验车身稳定性,影响轮胎寿命,尤其在起伏或转向等路面,对传感器精度、信号传输速度、控制计算、驱动执行等要求更高。
在机械强度、电磁兼容、低速温升管理等也面临挑战。
技术趋势:提升自动驾驶执行层性能,推动自动驾驶技术发展。
自动驾驶执行层中最重要系统是电驱动和转向。
四电机驱动融合驱动与转向,实现车轮驱动和转向的双重动力源作用,更易于控制,同时,配合自动驾驶软件算法,提升动力系统控制精度,可进一步拓展更多自动驾驶场景。
轮边式四电机驱动:聚焦商用车特定领域技术原理:四个驱动电机实现横向机械解耦。
四个驱动电机独立分布于车轮内侧。
电机与减速器集成,减速器与车轮连接。
相比于集成式,轮边式四电机驱动由于取消传动轴,传输效率更高。
技术难题:受制于现阶段电驱系统体积功率密度,轮边电机布置在车轮内侧,电机布置在车轮内侧与悬架等会产生一定空间占用,因此轮边驱动系统目前仅应用在商用车领域。
技术趋势:受制于结构影响,在乘用车领域应用难度大;可利用轮边驱动的特点,在特定领域发挥优势。
轮毂式四电机驱动:四电机驱动的最终形态技术原理:轮毂式四电机驱动可分为内转子电机和外转子轮毂电机两类。
内转子的电机、电控、刹车片等集成在轮毂内,与轮边式驱动原理类似。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电动汽车四轮独立驱动技术综述摘要:在能源与环境的双重压力下,电驱动车辆已经成为当前汽车工业的发展趋势,其中四轮独立驱动技术更是成为当前相关领域的研究热点。
通过对电动汽车四轮独立驱动技术领域的关键技术的描述,如电动轮驱动电机及驱动系统、电子差速控制技术、整车控制技术进行分析,了解和深化对电动汽车的认识。
关键词:电动汽车,驱动电机,电子差速控制,整车控制0引言随着能源问题的突显和人们环境保护意识的加强,混合动力汽车(HEV)、燃料电池汽车(FCEV)、纯电动汽车(EV)等新能源汽车已经开始受到越来越多的关注。
在这种大背景下,具有无污染、零排放特点的纯电动汽车被公认为是最具有发展前途的交通工具之一[1]。
以驱动电机为原动机的电动汽车,在驱动形式的多样性上有较大优势。
其中,把电机直接安装在轮毂上,对整车进行驱动的四驱动方式称为四轮独立驱动(Four-wheel Independent Drive),简称4WD,因其简洁的整车结构、高效传动、以及能借助微控制器实时控制技术直接控制各电动轮实现差速转向和驱动防滑等突出优点,成为电动汽车发展的一个独特方向[2]。
目前率先进入到商业运行的电动车辆多是在传统内燃机汽车底盘结构上进行改造,以中置电机取代发动机作为车辆动力源。
由于机械传动系统结构未发生改变,这种形式电动车辆难以充分发挥电机驱动应有的各种技术优势。
随着电机技术的发展和线控技术的应用,以轮毂电机为驱动系统的底盘结构成为电动汽车新的发展方向[3]。
本文通过对电动汽车四轮独立驱动技术领域的关键技术的描述,如电动轮驱动电机及驱动系统、电子差速控制技术、整车控制技术,了解和深化对电动汽车的认识。
1国内外研究现状1.1国外电动汽车研究现状轮毂电机车辆平台自身具有的线传控制特征,使整车布置和控制系统设计具有很大的柔性,这些优势得到了各国汽车厂商和研发机构的认同并都展开了相关的研究。
不过受到安全法规的限制,现在与整车安全相关的线控技术还无法应用到量产车型当中。
因此,目前对基于轮毂电机平台的线控电动汽车的研究主要还是处于概念车的开发和实验室研究阶段。
丰田汽车公司从上世纪九十年代末开始进行轮毂电机驱动的纯电动车的开发,重点研究基于传统汽车底盘的轮毂电机电动汽车走向实用化的关键技术,如传统悬架、转向和制动系统等如何改进设计,以适应轮毂电机在车轮上的安装,全新结构的轮毂电机电动汽车的车体结构设计等[4]。
日本Nissan公司分别于2003年、2007年和2010年分别推出了Pivo1、Pivo2、Pivo3三款概念电动汽车。
Pivo1搭载Nissan自研的高性能锂电池组和电机驱动系统,Pivo1具有卓越的可操作性,驾驶舱能够180度旋转,驾驶方便且非常适合城市驾驶。
Pivo2和Pivo3型都借用了第一代的设计理念,不过采用了更加超前的技术。
整车采用全线控技术,以四轮轮毂电机为驱动系统,转向系统采用4 轮独立轮拱设计,具备可实现全新移动模式的“变形系统”。
相比Pivo2型,Pivo3还加入了取代后视镜的电子监控系统和日产“自动代客泊车”(Automated Valet Parking)系统。
Pivo3一旦停在指定的充电位置上将自动开始充电。
美国通用汽车公司2003年开发了轮毂电机后轮驱动的雪弗兰轻型电动汽车,在2005年北美国际汽车展上又展出新一代轮毂电机驱动的氢燃料电池电动汽车Sequel,由于驱动电机实时精确控制四个车轮扭矩,进一步提高车辆的稳定性和牵引性能,且有制动能量回收功能[5]。
东京大学Hori教授所领导的实验室Hori教授所领导的实验室先后开发了“UOT Electric March”和“UOT Electric March II”两种轮毂电机电动车[4,6]。
其中利用轮毂电机力矩响应快速精确、易获得驱动力矩和可单独控制每个车轮驱动力的特点,采用传统转向和悬架系统,实现了四轮独立驱动/制动控制。
东京农工大学永井正夫教授所领导的实验室开发了轮毂电机驱动的NOVEL -I和NOVEL-Ⅱ微型电动汽车,重点研究了基于模型匹配控制理论的DYC 控制策略和线控转向(SBW)的操纵稳定性控制策略[7]。
1.2 国内线控电动车辆研究现状随着国家在“863”计划在电动汽车重大课题中的推进,国内几个主要的汽车厂商和高校都已经对电动汽车的关键技术展开了深入研究。
不过受技术储备不足限制,汽车厂商的研究重点集中在混合动力和中置式纯电动汽车的开发上。
对于轮毂电机平台的线控车辆的研究,目前的研发力量主要集中在各大高校中。
同济大学较早展开相关研究,于2002年、2003年、2004年相继推出了春晖一号、春晖二号、春晖三号,它们是四轮驱动燃料电池微型电动汽车,具有斜行,原地转向,四轮转向功能。
基于该平台,同济大学重点研究了四轮驱动电动汽车的状态、轮胎侧偏刚度和路面附着系数估算方法[8]。
基于这些估计方法对传统转向和悬架结构的电动汽车进行驱动/制动的LQR和WLS控制以提高车辆的稳定性和电机工作效率,达到节能的目的[9]。
清华大学四轮独立驱动电动车研究主要从提高稳定性和改善机动性的目标出发,对全轮纵向力进行优化分配,提高了直接横摆力矩控制下的路面附着潜力和横摆响应速度,并研究基于电机节能策略的四轮独立电驱动车辆驱动力分配方法,通过优化保证正常驱动状态下整车具有最佳的经济性能[10]。
吉林大学研究了四轮独立驱动电动汽车转弯驱动工况下转矩协调控制方法,改善了车辆的操纵稳定性,并研究利用差动驱动进行助力转向,以提高转向轻便性和路感[11]。
上海交通大学提出基于滑模控制的四轮驱动电动汽车稳定性控制方法,侧偏角和横摆角速度联合控制策略能够将质心侧偏角控制在稳定范围内,并能很好跟踪车辆的期望横摆角速度[12]。
燕山大学提出了四轮独立驱动电动车等转矩和等功率驱动力分配策略。
武汉理工大学等提出的电动轮驱动电动车的驱动力R-v 控制策略能够提高汽车操纵性,并有节能的效果[13]。
哈尔滨工业大学、上海电驱动等在轮毂电机和电驱动轮开发和产品化方面做了大量研究工作[14]。
综合上述的研究概况可以看出,国外对线控电动车辆的研究得益于汽车厂商的参与和其雄厚的电控技术基础支撑,目前在工程化实现和可靠性上已经取得了一定的成果。
而国内的研究起步相对较晚,现在主要还处于实验室研究阶段,只有少部分高校结合自身研究需要搭建了试验样车。
2电动轮驱动电机及驱动系统电机及驱动系统是电动汽车动力系统的核心。
它由电动机、功率变换器和电子控制器构成。
车载电机驱动系统要求运行效率高,启动转矩大,过载能力强,冷却性好,调速范围宽,转速高,体积小,质量小等特性。
另外,还有动态制动性能强和能量回馈性能,能在恒转矩和恒功率区工作等要求。
车用电动机主要有直流电机(Direct Current Motor,DCM)、感应电机(Induction Motor,IM)、永磁无刷直流电机(Brushless DC Motor,BLDCM)、正弦波永磁同步电机(Permanet Magnet Synchromous,PMSM) 和开关磁阻电动机(Switched Reluntance Motor,SRM)五种类型[15]。
目前交流感应电机的主要优点是价格较低、效率高、重量轻,但启动转矩小。
永磁同步电机的主要优点是效率可以比交流感应电机高6个百分点,但价格较贵,永磁材料一般仅耐热120℃以下。
开关磁阻电机结构较新,优点是结构简单、可靠、成本较低、起动性能好,没有大的冲击电流,它兼有交流感应电机变频调速和直流电机调速的优点,缺点是噪声较大。
DCM结构简单、技术成熟、成本低,具有交流电动机所不可比拟的优良电磁转矩控制特性。
所以直到20世纪80年代中期,仍是国内外电动汽车用电机的主要研发对象。
但DCM电刷和换向器使得维护性增加,限制转速提高,并且体积和重量较大,应用日益减少,目前仅在一些场地车、旅游观光车和高尔夫球车上使用。
DCM一般采用PWM脉宽调制控制方式,其驱动电路相对简单,根据不同需求可设计成可逆和不可逆系统。
IM也是较早用于电动汽车驱动的一种电机,它的调速控制技术比较成熟,具有结构简单、体积小、质量小、成本低、运行可靠、转矩脉动小、噪声低、转速极限高和不用位置传感器等优点。
其控制技术主要有V/ F控制、转差频率控制、矢量控制(Vector Control,VC)和直接转矩控制(Direct TorqueControl,DTC)。
永磁同步电机按其反电动势不同分为方波的BLDCM和正弦波PMSM。
它们都具有较高的功率密度,其控制方式与感应电机基本相同,因此在电动汽车上得到了广泛的应用,是当前电动汽车用电动机的研发热点。
BLDCM系统不需要绝对位置传感器,一般采用霍尔元件或增量式码盘,也可以通过检测反电动势波形换相。
PMSM系统需要绝对式码盘或旋转变压器等转子位置传感器,这类电机具有较高的能量密度和效率,其体积小、惯性低、响应快,非常适应于电动汽车的驱动系统,有极好的应用前景。
目前日本研制的电动汽车主要采用这种电机。
SRM具有简单可靠、可在较宽转速和转矩范围内高效运行,控制灵活、可4 象限运行、响应速度快和成本较低等优点。
实际应用发现,SRM存在着转矩波动大、噪声大、需要位置检测器等缺点,所以应用受到了限制。
3电子差速控制技术根据汽车行驶运动学,以及运行中的车轮、道路及它们之间的相互物理作用可知,汽车在行驶过程中,左右车轮在同一时间内所滚过的行程往往是不相等的。
例如,汽车在转弯时,为满足运动学的要求,汽车外侧车轮的行程始终长于内侧的行程。
此外,即使汽车直线行驶,也会由于左右车轮在同一时间内所滚过的路面情况的不同,或由于左右车轮轮胎气压、轮胎负荷、胎面磨损程度的不同,以及制造误差导致左右车轮外径不等或滚动半径不等,从而左右两车轮行程不等。
在上述各种状态下,如采用单-驱动轴将动力传递给左右车轮,则会由于左右车轮的转速相等而行程不同的运动学矛盾,必然引发某一驱动车轮的滑转或滑移,其结果除了会使轮胎过早磨损、无益地消耗功率及使驱动轮轴超载等外,而且,还会因不能按所要求的瞬时中心转向而使操纵性发生变化。
同时,由于车轮与路面间,尤其在转弯时若有大的滑移或滑转,则易使汽车在转向时失去抗侧滑的能力而使稳定性变化。
因此,为了消除由于左右车轮在运动学上的不协调而产生的这些弊病,传统汽车左右车轮间装有机械差速器,从而保证了汽车驱动桥两侧车轮在行程不等时,具有不同旋转速度的可能性,使之满足汽车行驶运动学的规律性的要求。
图1 低速行驶时ACKERMANN和JEANTAND模型相对于机械差速器,电子差速有很多的优越性。
电子差速系统仅仅在需要转向时电机才有功率输出,它省去了传递效率低的机械传动,节省了能源。