液压平 衡 回 路 稳 定 性与爬行原因的分析
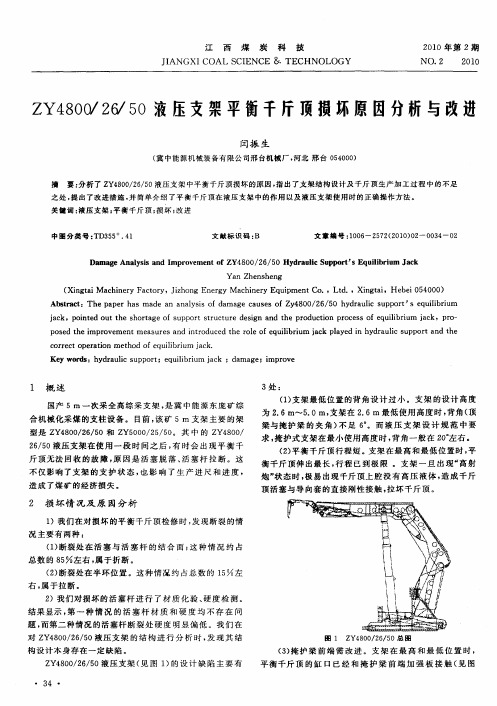
ZY4800/26/50液压支架平衡千斤顶损坏原因分析与改进
1 概 述
国 产 5m 一 次 采 全 高综 采 支 架 , 冀 中能 源 东 庞 矿 综 是
3处 :
() 架 最低 位 置 的背 角设 计 过 小 。支 架 的 设 计 高 度 1支
合机械化采煤 的支柱设备 。 目前 , 矿 5m支架主要 的架 该
型 是 Z 8 o 2 / O和 Z O O 2 / O Y4 0 / 6 5 Y5 o / 5 5 。其 中 的 Z 8 0 Y4 O /
江
西
煤
炭
科技 ຫໍສະໝຸດ 21 0 0年 第 2期
N o.2 2 1 00
JANGXICOAL S E I CI NCE & TECHNOL OGY
Z 8 0 2/ 压支 架 平 衡千 斤 顶 损坏 原 因分析 与改进 Y4 0/ 5 6 0液
闫振 生
( 中 能 源 机 械 装 备 有 限公 司邢 台机 械 厂 , 冀 河北 邢 台 0 4 0 ) 50 0
中 图分 类 号 : D 5 . 1 T 3 5 4
文 献 标 识 码 : B
文 章 编 号 :0 6 2 7 ( O O O — 0 3 一O 1 0 — 5 2 2 1 )2 0 4 2
Da g n ls n mp o e n fZ 4 0 / 6 5 d a l u p r’ q ib im a k ma eA ayi a d I rv me t Y 8 0 2 / 0 Hy r ui S p o tsE ul r s o c i u J c
摘
要 : 析 了 Z 4 0 / 6 5 压支 架 中 平 衡 千斤 顶损 坏 的 原 因 , 出 了支 架 结 构 设 计 及 千 斤 顶生 产加 工 过 程 中 的不 足 分 Y 80 2 / 0液 指
双向液压锁平衡回路稳定性分析及仿真

2 . T r o o p s N o . 9 6 6 5 6 ,P L A,B e i j i n g 1 0 0 1 4 4 ,C h i n a )
Ab s t r a c t :I n o r d e r t o s o l v e t h e p r o b l e m o f i n s t a b i l i t y o f t h e b a l a n c i n g c i r c u i t o f b i l a t e r l a h y d r a u l i c l o c k,t h e ma t h e ma t i c l a mo d e 1 wa s e s t a b l i s h e d f o r t h e b la a n c i n g c i r c u i t 。a n d i t s s t bi a l i t y wa s na a ly z e d i n t h e MAT L AB .T h e r e s u l t o f s i mu l a t i o n i n d i c a t e s t h a t t h e e x .
2 0 1 3年 7月 第4 1 卷 第1 3期
机床与液压
M ACHI NE TOOL & HYDRAULI CS
J u 1 . 2 0 1 3
Vo 1 . 41 No . 1 3
DOI : 1 0 . 3 9 6 9 / j . i s s n . 1 0 0 1—3 8 8 1 . 2 0 1 3 . 1 3 . 0 4 5
i n c r e a s i n g o f t h e p i s t o n a r e a o f b i l a t e r a l h y d r a u l i c l o c k, t h e s p e e d o f p i s t o n i n h y d r a u l i c c y l i n d e r i s mo r e a n d mo r e u n s t bl a e . Ke y wo r d s :Bi l a t e r l a h y d r a u l i c l o c k;S t bi a l i t y a n a l y s i s ; Ma t h e ma t i e a l mo d e l ;M A T L AB
叉车液压系统产生爬行现象的原因分析与故障排除的研究报告
叉车液压系统产生爬行现象的原因分析与故障排除的研究报告叉车是物流行业中最为常见的工具之一,叉车的牵引行驶和货物的提升均依赖于其液压系统。
然而,叉车在使用过程中,有时会出现“爬行”现象,即使没有任何操作控制,叉车也会向前或向后缓慢移动。
这种状态不仅会影响到操作者的安全,还会对货物造成损坏。
因此,本文将对叉车液压系统产生爬行现象的原因进行分析,并提供相应的故障排除方法。
一、产生爬行现象的原因1. 检修或更换系统元件不当液压系统元件是叉车板块,改变任何一个元件都可能导致系统不正常工作,例如紧固螺栓不够紧或阀芯安装位置不当,或者更换了不合适的油泵和阀门都会导致爬行现象。
2. 长期使用液压油的老化或泄漏等长期工作的液压系统会逐渐产生泄漏,液压油的质量也会随着时间的推移而恶化,这些问题都会导致爬行现象。
如果在液压系统中加入了含有磨损金属颗粒的润滑油,会对油门阀芯的密封性产生影响,导致液压缸传动。
3. 其他因素还有一些其他因素,比较常见的有行驶系统空气清洁不足、油温过高等。
二、故障排除方法1.检查液压系统如果液压系统中的油温过高,则需要检查液压系统的油流;如果液压缸间仍然存在内部泄漏,则要拆开液压缸并检查垫片;如果系统部件磨损、阀芯不密封,则要进行修复或更换。
2. 检查油门控制系统如果油门控制系统实现自动化,那么需要检查油门控制系统是否正确设置或光电开关是否正确。
3. 检查空气清洁状况确保液压系统的内部始终保持干燥和清洁状态。
总之,当液体压缩机的电源休息时,它的压缩室内的液体压力越来越低,但是如果压缩室处于压力平衡状态,则压缩室中的压力不会再下降。
因此,对于液体压缩机制造企业和使用者来说,他们要非常重视叉车的液压系统和安全操作,及时检查液压系统和注意维护保养,以减少或避免爬行现象的发生。
相关数据分析是分析某一特定问题的实据和依据,从中寻求出问题的根源和解决方法。
例如,在商业领域,相关数据分析可以帮助企业了解市场趋势和竞争状况,做出更好的商业决策。
液压系统存在的各种问题和解决办法分析

液压系统存在的问题和解决办法分析一.液压系统普遍存在的问题1.可靠性问题(寿命和稳定性)(1)国产元件质量差,不稳定;(2)设计水平低,系统不完善。
2.振动与噪音(1)系统中存在气体,没有排净。
(2)吸油管密封不好,吸进空气。
(3)系统压力高。
(4)管子管卡固定不合理。
(5)选用液压元件规格不合理,如小流量选用大通径的阀,产生低频振荡;系统压力在某一段产生共振。
3.效率问题液压系统的效率一般较低,只有80%左右或更低。
系统效率低的原因主要由于发热、漏油、回油背压大造成。
4.发热问题系统发热的原因主要由于节流调速、溢流阀溢流、系统中存在气体、回油背压大引起。
5.漏油问题(1)元件质量(包括液压件、密封件、管接头)不好,漏油。
(2)密封件形式是否合理,如单向密封、双向密封。
(3)管路的制作是否合理,管子憋劲。
(4)不正常振动引起管接头松动。
(5)液压元件连接螺钉的刚度不够,如国内叠加阀漏油。
(6)油路块、管接头加工精度不够,如密封槽尺寸不正确,光洁度、形位公差要求不合理,漏油。
6.维修问题维修难,主要原因:(1)设计考虑不周到,维修空间小,维修不便。
(2)要求维修工人技术水平高。
液压系统技术含量较高,要求工人技术水平高,出现故障,需要判断准确,不仅减少工作量,而且节约维修成本,因为液压系统充满了液压油,拆卸一次,必定要流出一些油,而这些油是不允许再加入系统中使用。
另外,拆卸过程有可能将脏东西带入系统,埋下事故隐患。
因此要求工人提高技术水平,判断正确非常必要。
7.液压系统的价格问题液压系统相对机械产品,元件制造精度高,因此成本高。
二.如何保证液压系统正常使用液压系统正常工作,需要满足以下条件:1.系统干净系统出现故障,70%都是由于系统中有脏东西如铁屑、焊渣、铁锈、漆皮等引起。
例如,这类污染物,如果堵住溢流阀中的小孔(0。
2mm)就建立不了压力;如果卡在方向阀阀芯,就导致不能换向,功能不对;如果堵住柱塞泵滑靴的小孔,就产生干摩擦,损坏泵。
液压平衡回路设计

液压平衡回路设计周海强;周志强【摘要】对液压平衡回路、锁紧回路进行了分析,指出了通常所用的平衡回路的不足,介绍在特定工况下使用的几款知名厂家的特殊功能平衡阀,并设计与分析了几种相应的平衡回路。
%This paper analyzes the balance circuit, latch circuit and points out the deficiencies of balance circuit usual-ly used. The balance valves of several well-known manufacturers, which are used in special conditions and have the special functions, are introduced in this paper. Besides, everal corresponding balance circuits used in special condi-tions are also introduced.【期刊名称】《流体传动与控制》【年(卷),期】2014(000)006【总页数】4页(P36-38,56)【关键词】平衡回路;锁紧回路;平衡阀【作者】周海强;周志强【作者单位】航天一院18所北京 100076;航天二院206所北京 100854【正文语种】中文【中图分类】TP137平衡回路是液压传动中的一种压力控制基本回路,是为了防止液压传动竖直运动部件,由于自重而自行下落,或者下落时超速失锁,造成冲击而在回路上设置适当阻力的回路。
当执行机构在不运动时受重力作用,为了平衡重力负载,维持执行机构不动而采用平衡回路。
常用的办法是在液压回路中加上平衡阀,采用单向顺序阀的平衡回路和采用液控单向阀和单向节流阀的平衡回路。
平衡回路对闭锁性要求、可靠性要求都较高。
在使用平衡回路时,为防止重物产生超速下滑,在液压系统中加入合适的压力控制阀或流量控制阀,做到真正意义上的平衡作用。
液压缸平稳性分析
z so ed n mi h r ce it f y r u i c l d ra d t e fco f e c d o s moin e ft y a c c a a tr i o d a l yi e h a t ri l n e n i t h sc h c n n n u t o
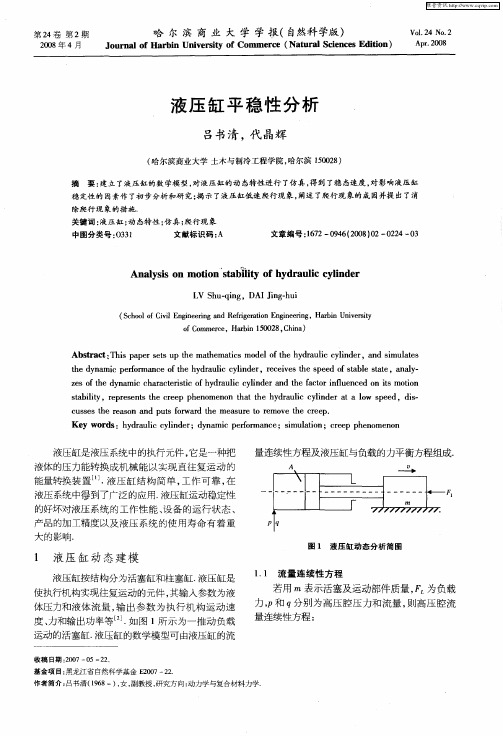
运 动 的活塞 缸. 压缸 的数学模 可 由液 压缶 的流 液 T
收稿 日期 :0 7—0 2 . 20 5— 2
若用 m表示活塞及运动部件质量, L F 为负载
力, q P和 分别为高压腔压力和流量, 则高压腔流 量连续性方程 :
基金项 目: 黑龙江省 自然科学基金 E 07— 2 20 2 . 作者简介 : 吕书清(9 8一) 女 , 16 , 副教授 , 研究方向: 分 析 伺 嘲
l 液压 缸 动态 建 模
液压缸按 结构 分为 活塞缸 和柱塞 缸 . 液压缸 是 1 1 流量 连续性 方程 ・
使执行机构实现往复运动的元件 , 其输入参数为液
体压力和液体流量 , 输出参数为执行机构运动速 度、 力和输出功率等 . 如图 1 所示为一推动负载
s bi t a i t l y,r p e e t h r e h n me o h tt e h d a lc c ln r a o s e d,d s e r s ns t e c e p p e o n n t a y r u i y ide ta lw p e h i—
Ab t a t T i p p rs t u e mah mai smo e f h y r u i c l d r n i lt s sr c : h s a e es p t t e t d lo e h d a l yi e ,a d smu ae h c t c n
液压起重机中的平衡阀及故障分析3篇
液压是机械行业、机电行业的一个名词。
液压可以用动力传动方式,成为液压传动。
今天为大家精心准备了液压起重机中的平衡阀及故障分析3篇,希望对大家有所帮助!液压起重机中的平衡阀及故障分析1篇浙江省特种设备科学研究院浙江省杭州市 310020摘要:随着经济的高速发展,国家基础建设的规模越来越大,需要吊运物品的质量、体积和起升高度都越来越大。
在起重机的市场保有量逐年上升的同时,客户对机器的操控性要求越来越高。
重物的平稳提升与下放是起重机操控性的一个非常关键的指标,所以通过掌握液压平衡阀的平衡原理来提升产品的品质是非常重要的。
关键词:汽车起重机;平衡阀;故障;解决方案1提升平衡阀的液压原理分析当马达做上升动作时,压力油从A口进入,经过独立的进油单向阀后进入B 口。
马达做下降动作:先导口压力p启=0时,平衡阀锥阀密封关闭。
先导口压力p启≠0时,平衡阀主阀芯产生位移。
F:弹簧力;f:缝隙缓冲阻力。
令主阀芯的位移y,当0<y<x时,锥阀密封被打开,滑阀密封未打开。
阀芯右移,推动缝隙缓冲阻尼装置右移,容腔被压缩,油液经小孔流入A口,此时的缝隙缓冲阻尼装置不起作用。
此时由于滑阀未打开,阻尼M1、M3、锥阀液阻很大将流量限制得很小,不需要缝隙缓冲阻尼装置,缝隙缓冲阻力f很小。
当y>x时,滑阀密封被打开。
此时压力油从B口经滑阀、锥阀进入A口。
当滑阀被打开,流量瞬间变大,同时缝隙缓冲阻尼装置上的小孔随即进入到配合间隙中,缝隙缓冲阻尼装置开启起缓冲作用。
阀芯右移,推动缝隙缓冲阻尼装置右移,容腔被压缩,油液经小孔、配合缝隙流入A口,此时的缝隙缓冲阻尼装置起作用,缝隙缓冲阻力f很大。
卸掉先导压力p启时,主阀芯在弹簧力的作用下向做移动,单向阀DLS被打开,A口液压油进入缝隙缓冲阻尼的容腔中。
马达下降口供油,油液经阻尼N1、N3、单向阀到达A口,N1与N3组成一个液压半桥。
(3)在载荷G的波动值相同的情况下,A波动越大→加减速越明显→p下、p 启、F弹波动越明显→A波动越大。
《液压平衡阀应用技术》新书介绍

第4期(总期83期)2017年7月Fluid Power Transmission and ControlNo.4(Serial No.83)July,2017由笔者编著的新书《液压平衡阀应用技术》(以下简称该书)已由机械工业出版社在2017年5月出版投放市场。
平衡阀,其实,与保持物体平衡无关。
英语中被称为Counterbalance Valve ,指的是抵消(重力影响)阀,也被称为Load Control Valve (负载控制阀)、Mo-tion Control Valve (运动控制阀)、Overcentre Valve (过中心阀)、Boom Lock Valve (上升锁住阀)。
倒是其德文名称Lasthaltensventil (负载保持阀),或Senkbrems-ventil (下降减速阀)更贴近其关键功能,也被称为抗衡阀。
平衡阀,是一种复合阀,具有多种功能。
其中。
最关键的是控制负负载,即与运动方向一致的负载(见图1所示)。
带重量下降是很常见的负负载工况,因此,平衡阀也就成了非常普遍应用的阀。
图1负负载负载力是液压技术的敌人,要克服的对象,然而,控制负载运动,也是液压技术赖以生存的基本任务。
因此,分析了解负载的特性,掌握各种影响负载的因收稿日期:2017-06-10作者简介:张海平(1947-),男,博士,工程师,长期从事车载液压系统及专用微机控制系统的研发工作。
素,对用好液压技术是第一重要的。
该书第一章就分析了各类负载力的特性与影响因素,除了正负载、负负载外,还提出了主动性负载与被动性负载的概念。
平衡阀种类极其繁多。
根据控制压力相对于负载口压力的作用方向,大致可分为同向型和反向型两大类(见图2所示)。
(a )同向型(b )反向型图2平衡阀分类同向型的,负载压力的作用方向是使液流通道开启,因此,可以同时实现溢流功能,结构相对简单些。
但万一弹簧断了,液流通道可能在负载压力作用下开启,使负载运动不可控。
液压三种调速回路特性比较分析报告

液压三种调速回路特性分析报告学院:机械工程学院班级:机师1111姓名:***学号:***********液压三种调速回路特性分析报告下面分析三种调速回路为什么在速度稳定性、承载能力、调速范围、功率特性、适用范围等特性方面不同。
三种调速回路特性比较1、首先分析比较进出油回路与旁油回路在速度稳定性、承载能力、调速范围、功率特性、适用范围等方面的区别:(1)进油节流调速回路:液压缸动作后,活塞杆缓慢动作,逐渐调大通流面积可以观察到活塞杆运动速度增大;在运行过程中,可以看到活塞杆动作时快时慢,这个是由于进油口有节流阀限制流量,而在回油口又没有背压阀的原因,所以运动平稳性差;通常在刚启动时由于有节流阀串联在进油口,所以启动冲击小;另外多余的油液被溢出,所以工作效率低。
在本回路中,工作部件的运动速度随外负载的增减而忽快忽慢,难以得到准确的速度,故适用于轻负载或负载变化不大,以及速度不高的场合。
(2)回油节流调速回路:节流阀在回油路中,所以这种回路多用在功率不大,但载荷变化较大,运动平稳性要求较高的液压系统中,如磨削和精镗的组合机床等。
(3)旁路节流调速回路:与前两种回路的调速方法不同,它的节流阀和执行元件是并联关系,节流阀开的越大,活塞杆运行越慢。
这种回路适用于负载变化小,对运动平稳性要求不高的高速大功率的场合,例如牛头刨床的主传动系统,有时候也可用在随着负载增大,要求进给速度自动减小的场合。
2、分析比较用节流阀和用调速阀在速度稳定性、承载能力、调速范围、功率特性、适用范围等方面的区别:由于调速阀本身能在负载变化的变件下保证节流阀进、出油口间压差基本不变,通过的流量也基本不变,因而回路的速度-负载性将得到改善,旁路节流调速回路的承载能力也不会因活塞速度降低而减小。
调速阀节流调速回路的速度-负载特性曲线如图7-6所示3、分析比较限压式和稳流式容积节流调速回路在速度稳定性、承载能力、调速范围、功率特性、适用范围等方面的区别:(1)限压式容积节流调速回路变量泵输出的流量P q 和进入液压缸的流量1q 相适应。
油压机液压马达的爬行现象
油压机液压马达的爬行现象产生爬行现象的原因是什么? 所谓爬行现象,就是当液压马达工作转速过低时,往往保持不了均匀的速度,进入一种时动时停的不稳定运动状态。
液压马达在低速时产生爬行现象的原因如下。
摩擦力的大小不稳定通常的摩擦力是随速度增大而增加的,而在静止和低速区域工作的马达内部的摩擦阻力,当工作速度增大时非但不增加,反而减少,形成了所谓"负特性"的阻力。
另一方面,油压机.jpg液压马达和负载是由液压油被压缩后压力升高而被推动的,因此,的物理模型表示低速区域液压马达的工作过程:以匀速Va 推弹簧的一端(相当于高压下不可压缩的工作介质) ,使质量为m的物体(相当于马达和负载质量、转动惯量)克服“负特性”的摩擦阻力而运动。
当物体静止或速度很低时阻力大,弹簧不断压缩,增加推力。
只有等到弹簧压缩到其推力大于静摩擦力时才开始运动。
一旦物体开始运动,阻力突然减小,物体突然加速跃动,其结果又使弹簧的压缩量减少,推力减小,物体依靠惯性前移一段路程后停止下来,直到弹簧的移动又使弹簧压缩,推力增加,物体就再一次跃动为止,形成的时动时停的状态,对液压马达来说,就出现了爬行现象。
油压机轴向柱塞式液压马达的工作原理四柱油压机.jpg轴向柱塞马达的结构形式基本上与轴向柱塞泵一样,故其种类与轴向柱塞泵相同,也分为斜盘式轴向柱塞马达和斜轴式轴向柱塞马达两类。
轴向柱塞马达的工作原理。
当压力油进入液压马达的高压腔之后,工作柱塞便受到大小为pA Cp为油压力,A 为柱塞面积的油压作用力,通过滑靴压向斜盘,其反作用为N。
N力分解成两个分力,沿柱塞轴向分力户,与柱塞所受液压力平衡;另一分力F,与柱塞轴线垂直向上,它与缸体中心线的距离为γ,这个力便产生驱动马达旋转的力矩。
液压机.jpg液压马达的主要技术参数油压机液压马达的技术参数有以下几种。
①排量(mL/r) :马达轴每转一转所需输入的液体体积。
②额定压力(MPa) :在额定转速范围内连续运转,能达到设计寿命的最高输入压力。
液压平衡回路辨析
(0)
#! 所以有 &, #$ $ #$ & $ (. #/ #! !
。任何平衡回路工作过程中,
! (1) !! ! 系统提供的流量 &$ 恒定的情况下, 由式 ( 1) 可导出此 &$ $
!
均有三种运动状态, 即举重上升, 承载静止, 负载下行。 目前平衡回路存在的主要问题是承载下行过程中稳定 [$!万方数据 ] 性较差 。
采用远控阀比采用自控阀的平衡回路系统效率高。错 误之二是说图 DJ 中的单向节流阀用于控制活塞的下
[DD] 降速度 。如何判断这一结论中的错误呢?首先要
对这两个回路中的能量关系进行分析比较。不难发 现, 平衡回路就是要将回路中的负载所产生的能量 (在 这里表现为势能) 吸收并转化为热能形式释放, 因此,
武汉理工大学出版社20016郭政军罗公粮平衡回路振动原因分析建设机械技术与管理200267易伟平汽车起重机平衡回路分析专用汽车199848丰收混凝土泵车平衡回路的故障排除工程机械与维修199569贺劲液压步履式桩架起架机构平衡回路的改进设计建设机械技术与管理199510赵春红起重机液压平衡回路的改进工程机械与维修2000411姚丁曦周庆熊液压传动系统教学中的思考与实践太原工业大学高等工程教育199312刘元权qt60型塔式起重机爬行的分析与对策工程机械199910作者简介
平衡回路设计与选用正确方法
能源消耗
使用条件
不严格
! " ""
! ! "! &
! )" ( $# ( $ $
!
严格
! " ""
! ! "! &
$ ! )" ( $# ( $
实验机液压平衡回路的故障诊断

图分别连接各元件的主油路和控制油路。③液压泵
为Y B X一1 6变量 泵 , 换 向阀采用 三位 四通 O型 中位
机能 的电磁换 向阀 。 当换 向阀左 位 接 通 时 , 液压 缸 上腔 进油 , 下 腔 回油 , 液 压 缸下 行 , 流 量 由调 速 阀 调
节 。这 时液压 缸要 满足公 式
液压 平衡 回路 是 液 压 缸垂 直 安 装 时 , 为 了防 止 立式 液压 缸及 工作 部 件 因 自身重 力 而 自行下 落 , 或 在活 塞下行 运 动 中速度 超过液 压泵 供油 所能 达到 的 速度 使工作 腔 形成 真 空 , 在 回油路 上 设 置 产 生 一定
验者 把上 述 电路 和 油路 分 别 连 接 完成 。启 动泵 后 , 液压 缸运 动到 中间部 位 时便 停 止 运 动 , 换 向阀无 论 怎 么换位 , 缸 始终纹 丝不 动 , 液 压 系统故 障发 生 了。 3 . 液 压 回路症 状诊 断
P1 A1+ =p 2 A2
会造成整个系统的故障 , 故障诊断和排 除的难度较
大 。故 障树分 析法 是 加 快 故 障诊 断 速 度 , 找 出问题
症结的有效方法 , 把液压缸不动作这一故 障状态作
为分 析 的 目标 , 然后 找 出导致 这一 故 障的各 个 因素 ,
逐项 排 除 , 最终 达 到解 除故 障的 目的 。 2 . 液 压平 衡 回路及 症状
关键词 : 液 压 平衡 回路 ; 故 障; 诊断; 故 障树
中图分类号 : T H 1 3 7
文献标识码 : A
文章编号 : 1 0 0 8— 3 7 1 5 ( 2 0 1 3 ) 0 2— 0 1 1 2— 0 4
平衡回路振动原因分析

矿产资源开发利用方案编写内容要求及审查大纲
矿产资源开发利用方案编写内容要求及《矿产资源开发利用方案》审查大纲一、概述
㈠矿区位置、隶属关系和企业性质。
如为改扩建矿山, 应说明矿山现状、
特点及存在的主要问题。
㈡编制依据
(1简述项目前期工作进展情况及与有关方面对项目的意向性协议情况。
(2 列出开发利用方案编制所依据的主要基础性资料的名称。
如经储量管理部门认定的矿区地质勘探报告、选矿试验报告、加工利用试验报告、工程地质初评资料、矿区水文资料和供水资料等。
对改、扩建矿山应有生产实际资料, 如矿山总平面现状图、矿床开拓系统图、采场现状图和主要采选设备清单等。
二、矿产品需求现状和预测
㈠该矿产在国内需求情况和市场供应情况
1、矿产品现状及加工利用趋向。
2、国内近、远期的需求量及主要销向预测。
㈡产品价格分析
1、国内矿产品价格现状。
2、矿产品价格稳定性及变化趋势。
三、矿产资源概况
㈠矿区总体概况
1、矿区总体规划情况。
2、矿区矿产资源概况。
3、该设计与矿区总体开发的关系。
㈡该设计项目的资源概况
1、矿床地质及构造特征。
2、矿床开采技术条件及水文地质条件。
接触网作业车升降平台液压系统常见故障分析及解决措施
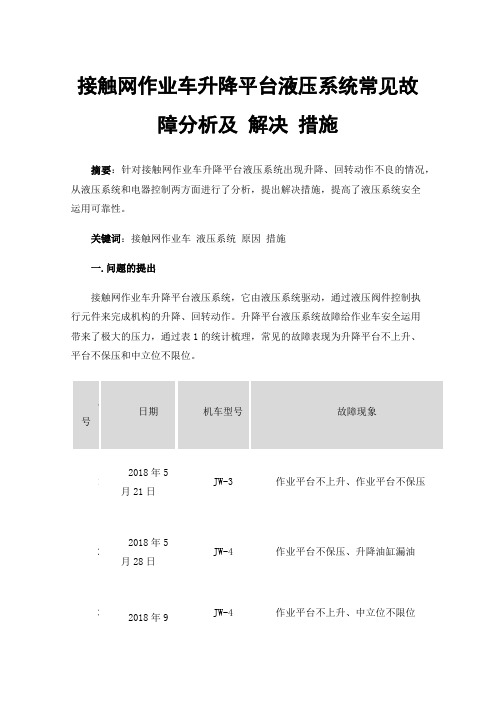
接触网作业车升降平台液压系统常见故障分析及解决措施摘要:针对接触网作业车升降平台液压系统出现升降、回转动作不良的情况,从液压系统和电器控制两方面进行了分析,提出解决措施,提高了液压系统安全运用可靠性。
关键词:接触网作业车液压系统原因措施一.问题的提出接触网作业车升降平台液压系统,它由液压系统驱动,通过液压阀件控制执行元件来完成机构的升降、回转动作。
升降平台液压系统故障给作业车安全运用带来了极大的压力,通过表1的统计梳理,常见的故障表现为升降平台不上升、平台不保压和中立位不限位。
序号日期机车型号故障现象12018年5月21日JW-3作业平台不上升、作业平台不保压22018年5月28日JW-4作业平台不保压、升降油缸漏油32018年9JW-4作业平台不上升、中立位不限位月10日42018年11月23日JW-3作业平台不保压、中立位不限位52018年12月14日JW-3平台上升时抖动、中立位不限位62018年12月14日JW-3平台上升抖动、平台不保压、升降油缸漏油72020年4月27日JW-4G平台旋转后,平台不保压,平台倾斜表1接触网作业车升降平台液压系统故障统计表二.故障原因分析1.升降平台不上升(1)液压系统管路接错导致平台不能动作,由于接触网作业车液压系统管路较多,管路连接比较复杂,特别是从车底连接到平台上部的管路,安装通道比较小、管路多,作业人员作业时容易出现连接错误的现象,最常见的错误是升降油缸回油管错误的连接到液压系统进油回路中,导致进油管和回油管路压力相等平台不动作。
(2)升降油缸油封安装不到位或缸体有毛刺等导致油缸内部出现窜油,当控制平台升降扳件开关打到“平台上升”位时,升降油缸活塞下部压力油通过毛刺或油封处窜到活塞上部,导致活塞下部与上部压力差变小,加之平台自身重量,平台会上升一段非常小距离后停下就不在上升。
升降油缸是液压系统中的执行元件,将压力能转变为机械能使作业平台上升和下降。
液压系统爬行浅析
液压系统爬行浅析(汽运二队刘锋)一、液压系统中“爬行”的概念在液压系统中,由于流进或流出执行元件的流量不稳定,出现间隙式的断流现象,使得执行机械的运动产生滑动与停止交替出现的现象。
二、液压系统中常见的爬行现象产生的原因(一)润滑条件不良导致爬行故障当滑动速度减小时,油楔作用减弱,润滑油膜变薄,甚至部分油膜破裂,造成金属表面局部接触。
当滑动速度降到一定值时,油膜断裂比率增加,摩擦力随之增大,摩擦系数增加到某一定值后,滑动副会交替出现“停顿一滑动—停顿”的“爬行”现象。
因此润滑不良,润滑系统供油不足及供油压力过大或过小,或导轨面刮点不合要求(过多或过少)等,都会造成油膜破裂,出现爬行。
主要表现在用手触检执行元件时,有波浪式的摆振,且节奏感强;用手捏搓润滑油时,滑感差。
(二)系统进气导致爬行故障系统进气产生的因素有多方面,一方面由液压泵处连续进气会导致爬行,主要表现在压力表显示值较低、压力升不起来、执行元件工作无力,在采取排气措施后,正常一段时间后继续爬行。
另一方面系统维修之后未排气,管路中存有空气会导致系统爬行故障,主要表现在执行元件到达终点或停止前发生爬行,规律性很强,有的并伴有振动和强烈的噪声。
(三)机械别动导致爬行故障这种情况相对前两者比较少见,它是由于液压马达转动件与固定件不同心,活塞和活塞杆与缸体不同心,执行元件运动零部件密封过紧,摩擦阻力过大等等。
主要表现在压力表显示值较高,执行元件爬行,规律性很强伴有抖动。
(四)液压系统密封不良而泄漏导致爬行故障这种故障对于矿山老化的设备较为常见。
主要表现在执行元件爬行且规律性很强,爬行部位极为明显;压力表显示值上升很慢,即使将溢流阀调得很高甚至关死,压力仍难以升起来。
四、故障排除方法(一)润滑不良排除方法这种故障排除主要是检查或更换液压油,以恢复润滑性能,清洗润滑孔道系统,使润滑油路畅通,恢复润滑性能。
(二)系统进气排除方法这种故障多因液压泵吸油侧、吸油管及接头处密封不良、油箱油砌过低,吸油管在吸油时液面呈波浪状,致使吸油管间断性地露出波面,从而导致液压泵吸气故障。
液压系统平衡回路分析

2021年第1期(总199期)CFHI**************一重技术液压传动因为具有一系列优点而广泛地应用于起重运输机械、矿山机械、机床加工等多个领域[1]。
在很多场合,工作装置需要负重做较大距离的升降工作。
当重物下降时,会因为自身的重力而加速下行,这样不仅威胁到人员的安全,还会影响到作业区域机器设备的安全,是绝对不允许的。
因此,工作装置的液压系统需要设置专门的平衡回路,同为正常的施工作业提供安全保障。
此外,当工作需要时,可以通过平衡回路使重物停留在某一位置。
因此,平衡回路的作用是防止工作装置超速下降和实现承重静止。
通常是在回油路上设置节流阀或顺序阀,以达到限定执行元件速度(转速)的目的,必要时可增设液控单向阀。
1采用节流阀的平衡回路在由节流阀构成的平衡回路中,节流阀具有控制回路流量,限制执行元件速度的作用[2]。
当换向阀处于右工作位时,液压缸的小腔进油,大腔回油,活塞缩回,重物随之下降。
如果需要重物停留某一位置,则需要回路具备锁紧功能,此时可增设一液控单向阀(见图1)。
重物停止运动时,换向阀回归中位,进油路泄压,液控单向阀的控制油液也会泄压,液控单向阀关闭,实现锁紧,回路处于承重静止状态[3]。
液控单向阀属于锥阀式机构,锁紧性能好。
因此,重物的定位精度很高[4]。
当重物下降时,进油腔压力形成,液控单向阀打开,回油路的油液反向通过液控单向阀。
对于该类型的回路,节流阀形成足够压力和稳定流量的动态过程时间较长,因此在相当长的时间内,重物处于加速下降状态,然后才转为匀速运动。
此类回路只适用于对下降速度均匀性要求不高的场合[5]。
为了实现重物在静止时的定位精度,换向阀中位宜采用H 型或Y 型,否则液控单向阀因1.四川建筑职业技术学院交通与市政工程系讲师,四川德阳618000液压系统平衡回路分析徐成东1摘要:平衡回路可由节流阀或顺序阀构成。
通过对节流阀构成的平衡回路进行分析,论述实现锁紧的措施。
内控顺序阀和外控顺序阀均可用于平衡回路,作为平衡阀使用。
影响液压助力器稳定性的因素及改善措施
Be a s a tr f d sg , c u e fc os o e in
wh c a ih c n
sa iy c e ce t o o d o o t r i to s l o m e t a i c ndton f sa iiyS i o a tr ha g i wo k, tbl o f in fs me hy r bo se s o ma l e b sc o ii o t blt .o fs me f co c n es n t i t r
us d a o e ba k t q lbrum e c n c m c o e uii i whe rg n lwo k n t t s de to d Bu fsa lt fh r b ose c m e b d, s r-e c td v — n o i a r i g sae i srye . i ti t b i o yd o o tr be o a y e f x ie i
brn n d r tv ihe n fmo a e s ra e I ho e c nti utr e c ptpe o m a e p r m ee fb e d f s se ig o u a ie dt r g o v bl u f c 。 n t s o rb o , x e r r nc a a tr o l e -o i f y t m a d sr t r lbe n tucu a —
常见液压系统故障分析和排除方法doc202208

常见液压系统故障分析和排除方法doc202208一、故障概述:1、液压油的泄漏2、液压油的粘度与工作油度密切相关3、液压元件的磨损失效,温度对液压元件材料热胀的影响4、油液污染物对液压系统造成不确定因素的故障二、液压系统的常见故障1、压力故障:压力不够、压力不稳定、压力调节失灵、压力损失大2、动作故障:速度达不到要求,没有动作,动作方向错误,负载速度明显下降,起步迟缓、爬生,3、振动和噪音4、系统发热三、液压系统故障的特点1、故障的多样性和复杂性:压力不稳定常与振动噪声同时出现,系统压力故障往往和动作故障一起。
2、故障的隐蔽性:液压传动是依靠在密闭管道内具有一定压力能的油液来传递动力的,系统的元件内部结构及工作状况不能从外表进行直接观察。
因此,它的故障具有隐蔽性,不如机械传动系统故障那么直观,又不如电气传动那样易于检测,液压装置的损坏与失效,往往发生在系统内部,由于不便拆装,现场的检测条件也很有限,难以直接观测,使得液压系统故障分析比较困难。
3、引起同一故障的原因和同一原因引起故障的多样性一个故障有多种可能的原因,而且这些原因常常是互相交织,相互影响,如系统压力达不到要求,其产生原因可能是泵引起的,也可能是溢流阀引起的,还可能是中心回转体引起的,此外,系统的执行元件的泄漏也会引起系统压力不足。
液压系统中的一个故障可能多种多样的故障,例如:同样是混入空气,轻则会引起流量、压力的波动,严重时会引起泵吸不进油。
对于一种症状有多种可能原因的情形:应采取有效手段剔除不存在的原因,对于一个故障源产生多个症状的情形,可利用多个症状的组合来确定故障源。
故障产生的偶然性:液压系统在运行过程中,会受到各种各样的随机性因素影响,尤其是污染物的浸入,如阻尼孔的堵死、换向阀阀芯的卡死,电磁铁吸合不正常等等,这些故障没有一定的规律可循。
4、典型故障1)泄漏和堵塞,泄漏又分为内泄漏和外泄漏。
内漏是指液压元件内部的油液从高压区域到低压区域的泄漏,它会使液压系统的压力降低,执行元件不能正常工作,外漏是液压系统内的油液流到液压系统外部的泄漏,它污染环境和设备。
液压系统爬行现象分析与应对措施

果是操纵箱或油路设计的缺陷使得
结构不合理,致使空气进入油压系 统,则应改进设计。
粗糙度,使表面粗糙度值加大。
消除爬行现象的措施
结语
产生爬行现象的原因很多,解 某些机床,由于工作性能的要 i 决的途径也多种多样。在生产实践 求 ,采用极低 的运 动速度 ,例如 坐
进入。由于液压泵吸油管处的过滤 网被杂质堵塞,从而使吸油管道造
成局部真 空 ,由此进入空 气。只要
到准确定位,一般在定位之前由高
将滤油网拆下来清洗干净或更换新
~5 速变为低速) 但是低速往往产生爬 f 的滤油网即可。液压油应每隔 3 ,
新机床在3 个月内应 行现象。如果工作台产生爬行,就 i个月过滤一次。 该经常检查油路。油液必要时应该 会使得工作台偏离正确位置若干微
持一 定的相对位置达到 的,这可通 『
过移动工件或刀具 ,或者同时移动 工件.J具来实现。如果刀具或工 fl , r J
若储油箱的油面上有大量的泡 沫, 则表明液压系统中有空气存在。
在这种情况下, 常采用的方法是: 首
件运动时产生爬行现象,不能精确
地控制速度和距离时,加工精度就
运动速度继续增大 ,摩擦力矩也继 续增大 ( 因为润滑油有粘性) 当运 , 动速度增大到一定数值时摩擦力矩
不再随速度变化而变化。摩擦力矩 的变化是复杂的,速度与加速度都
爬行现象容易产生在传动系统刚度低、滑动面润滑 不良的运动系统中。在机械传动中,两滑动面间有压力
时就有摩擦阻力产生。摩擦力F决定于滑动面间的正压 力Ⅳ及摩擦系数 , 即F N 摩擦系数的大小决定了 = 。
米 ,达不到所要 求的定位精度 ,故 J随时过滤和及时更换。在灌入过滤
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
矿产资源开发利用方案编写内容要求及审查大纲
矿产资源开发利用方案编写内容要求及《矿产资源开发利用方案》审查大纲一、概述
㈠矿区位置、隶属关系和企业性质。
如为改扩建矿山, 应说明矿山现状、
特点及存在的主要问题。
㈡编制依据
(1简述项目前期工作进展情况及与有关方面对项目的意向性协议情况。
(2 列出开发利用方案编制所依据的主要基础性资料的名称。
如经储量管理部门认定的矿区地质勘探报告、选矿试验报告、加工利用试验报告、工程地质初评资料、矿区水文资料和供水资料等。
对改、扩建矿山应有生产实际资料, 如矿山总平面现状图、矿床开拓系统图、采场现状图和主要采选设备清单等。
二、矿产品需求现状和预测
㈠该矿产在国内需求情况和市场供应情况
1、矿产品现状及加工利用趋向。
2、国内近、远期的需求量及主要销向预测。
㈡产品价格分析
1、国内矿产品价格现状。
2、矿产品价格稳定性及变化趋势。
三、矿产资源概况
㈠矿区总体概况
1、矿区总体规划情况。
2、矿区矿产资源概况。
3、该设计与矿区总体开发的关系。
㈡该设计项目的资源概况
1、矿床地质及构造特征。
2、矿床开采技术条件及水文地质条件。