硬件在环hil简介
NI HIL介绍
数学模型 + I/O
闭环系统
期望响应
控制器 (UUT)
控制信号
受控对象
实际响应
受控对象的仿真系统
被控对象模型仿真 + 测试系统
用户界面
激励 测试序列
数据记录/ 分析
待测对象: 控制器
控制 信号 期望输出
环境扰动
被控对象模型
实际输出
实际输出
HIL测试系统的基本硬件架构
上位机
Ethernet
军工与航空航天
航空发动机模型 无人飞行器模型 水下探测器模型 …… • • • •
能源、电力
发电机及电力电子器件 风机模型(包括机械部分) 涡轮机模型 ……
闭环控制系统
控制器
期望响应 控制信号
受控对象
实际响应
控制器设计
受控对象的特性
基于模型的控制器设计流程
Kc Kp
设计/建模 (MIL)
系统测试
利用NI VeriStand的开放性
可调用多种环境下建 立的模型
通过NI LabVIEW自定义NI 通过LabVIEW FPGA模块 VeriStand的用户界面 自定义板载FPGA功能
支持使用Python编辑 的测试序列
结合NI TestStand进 行测试管理
结合NI DIAdem进行 数据管理
• 希望缩短开发周期,降低开发风险和成本
– 受控对象的生产设计与控制器开发同步进行
应用举例: 发动机ECU测试
• 油门踏板开度
• 发动机凸轴和 曲轮轴信号
发动机控制器(ECU)
• 喷油信号 • 点火信号
发动机仿真系统
应用举例: 整车模型仿真
硬件在环hil简介.

35
>> drive_hard_stop
36
Torsional Spring-Damper
扭转弹簧减震器模型代表 用扭转弹簧连接的两段轴 的传动 参数:
刚度 阻尼 初始偏移量 自由行程
示例 >>drive_spring
37
Torsional Spring-Damper原理
车的质量(m) 质心的位置 (m) 迎风面积 (m2)
空气阻力系数Cd 车在水平方向山的初速度(m/s)
46
车辆纵向动力学原理
47
示例 >>drive_4wd_dynamics
48
建立SimDriveline 模型的一般步骤
确定转动惯量 确定传动约束(gears) 确定传动连接件(如离合器) 确定系统的扭矩输入和运动输出 确定求解方式 运行,观察结果
27
Controllable Friction Clutch 可控摩擦片式离合器
这是一个用压力信号控制的包含 动摩擦和静摩擦的摩擦片离合器 模型 工作模式可分为两种(双向和无 方向) 离合器工作的三种状态:
Unengaged Engaged (but not locked) Locked
43
引擎的原理 τ = T·g(Ω) g(Ω)=60/2/pi*P (Ω)/n P(Ω)=p0+p1*n+p2*n2 +p3*n3
44
轮胎
轮胎模型是整个传动系的 结束端 输入量为汽车在垂直方向 的负荷Fz和行使方向的速 度Vx;输出量为车轮的转 速Ω和纵向牵引力Fx 参数为:
Torque Actuator是扭矩施加 模块。连接从simulink 传递 来的扭矩 Torque Sensor是扭矩传感 器B是驱动端F是被动端, Tor为扭矩向simulink 输出端 口 同理有Motion Actuator和 Motion Sensor IC模块定义了转动件的初始 转速(rad/s)
汽车控制器硬件在环的概念
汽车控制器硬件在环的概念英文回答:Hardware-in-the-loop (HIL) testing is a type of testing that involves connecting a physical device to a simulated environment. In the context of automotive controllers, HIL testing is used to test the performance of the controllerin a simulated vehicle environment. This allows engineersto test the controller in a safe and controlled environment, without having to risk damaging the actual vehicle.HIL testing is typically performed using a HIL simulator. A HIL simulator is a computer-based system that creates a virtual environment that simulates the behaviorof the vehicle. The physical controller is then connectedto the HIL simulator, and the controller's performance is monitored and evaluated.HIL testing can be used to test a wide range of controller functions, including engine control,transmission control, and braking control. It can also be used to test the controller's response to different driving conditions, such as acceleration, braking, and cornering.HIL testing is a valuable tool for automotive engineers because it allows them to test the performance of the controller in a safe and controlled environment. This helps to ensure that the controller is functioning properly before it is installed in the actual vehicle.中文回答:汽车控制器硬件在环。
hil概念

hil概念Hil(硬件在环)是一个计算机专业术语,也即是硬件在回路。
它通过使用实时处理器运行仿真模型来模拟受控对象的运行状态,以此判断电控模块的性能。
Hil的概念在不同领域有不同的应用。
在社会学和心理学领域,Hil通常指一个人在社会互动中扮演的角色和呈现的形象。
在社会学中,Goffman认为每个人都有多个Hil,每个Hil都是一个特定的社会角色,如家庭成员、职业角色等。
一个人的Hil是一个社会角色的外延,通过不同的行为和言语来从事社会互动。
在工程领域,Hil常用于控制系统仿真和测试。
在HIL仿真测试系统中,受控对象被模拟出来,以此判断电控模块的性能。
根据它在环的深度分为几个层级,如ECU级、EPP级和System级。
这些层级采用不同的仿真模型和实物组合,实现半实物仿真测试。
HIL(硬件在环)技术在多个领域都有广泛的应用,以下是一些主要的应用领域:汽车领域:HIL技术可以帮助开发人员对汽车电子控制单元(ECU)进行全面的测试。
汽车ECU是汽车电子系统的核心,负责控制发动机、变速器、制动系统、安全系统等各个方面的功能。
通过HIL技术,可以测试ECU的性能和可靠性,从而大大缩短开发周期,减少开发成本。
航空航天领域:HIL技术也可以帮助开发人员对飞行控制系统进行全面的测试。
飞行控制系统是飞机的核心,负责控制飞机的飞行。
HIL技术可以测试飞行控制系统的性能和可靠性,从而提高飞行安全性,减少事故发生的可能性。
提高安全性:HIL测试可以在所有阶段下安全地进行对人员安全最为重要的系统功能测试,如ESP漂移,飞机的空中姿态调整等。
此外,HIL通常还允许一些破坏或损坏真实机器的测试。
超出正常操作范围的传感器数值可以测试在极端工况下,系统是否依然可以安全操作机器,这使得HIL成为提高机器和系统安全性的有效手段。
提高质量:如果将HIL仿真嵌入到基于模型的设计过程中,它就可以在设计的早期阶段使用。
控制工程师可以使用它来持续测试他们的控制系统,这些测试可以帮助发现系统缺陷和软件Bug。
发动机ECU 硬件在环(HIL)测试方案
发动机ECU硬件在环(HIL)测试解决方案一、 方案概述1.1 HIL测试系统概述随着汽车电子技术的不断革新和迅速发展,汽车电控单元数量的不断增加,汽车电子产品和技术在各种车型中得到了越来越多的应用,其中,汽车电子系统成本约占到整车的30%,而汽车故障的产生多发生在汽车电子系统,因此,从安全性、可行性和成本上考虑,硬件在回路(HIL)测试已经成为电控系统开发和应用中非常重要的一环,减少实车路试,缩短开发时间并降低成本的同时提高电控系统的软件质量,降低电控系统开发和应用的风险。
HIL(Hardware‐in‐the‐Loop)硬件在回路测试系统是以实时处理器中运行的实体仿真模型来模拟受控对象的运行状态,通过I/O接口与被测电控系统连接,对被测ECU进行全方面的、系统的测试。
系统原理如图1.1中所示。
图1.1 HIL测试系统原理HIL测试系统的特点:●模拟被控对象的各种工况,包括极限工况;●模拟复杂的故障模式,快速复现故障模式;●将部分测试过程从传统试验台架中分离;●自动化测试并生成测试报告,缩短测试周期;●易于维护和扩展测试能力。
1.2SimCar硬件在环测试系统简介SimCar硬件在环(HIL)测试系统是用于测试电控单元功能、系统集成和通信的一套完整的硬件在环仿真测试设备,可用于汽车、航空、兵器、工程机械等领域。
基于SimCar硬件在环测试系统针对用户的被控对象进行建模仿真,并将其运行于跟控制器闭环工作的实时系统中,实现对汽车电控单元的复杂测试。
SimCar硬件在环仿真系统主要由三部分组成:仿真硬件平台、试验管理软件及车辆实时仿真模型。
系统组成示意图如图1.2中所示:图1.2 SimCar测试系统组成SimCar支持的电控单元硬件在环测试:发动机ECU;自动变速器TCU;混合动力整车控制器HCU;纯电动汽车VCU;蓄电池管理系统BMS;汽车防抱死制动系统ABS;车身控制器BCM;二、 基于SimCar的发动机ECU测试解决方案2.1 发动机ECU测试系统原理如图2.1发动机ECU测试系统原理中所示,在试验定义中,上位机试验管理软件运行于PC机环境中,通过PC机通信口与SimCar实时仿真平台通信,汽车实时仿真模型运行在仿真平台的实时处理器中,运行于处理器中的模型I/O通过仿真平台中的集成的信号调理、负载仿真及功率驱动等硬件与实际的发动机ECU构成闭环连接,实现发动机ECU的系统测试。
hil 仿真基本原理
hil 仿真基本原理HIL Simulation: Basic PrinciplesHIL simulation, or Hardware-in-the-Loop simulation, is a crucial technique in the development and testing of complex systems, especially in the automotive and aerospace industries.HIL仿真,即硬件在环仿真,是开发和测试复杂系统,特别是在汽车和航空航天工业中的一项关键技术。
At its core, HIL simulation involves the integration of real hardware components with a simulated environment.其核心在于将真实的硬件组件与模拟环境进行集成。
This simulation environment is typically created using specialized software that can replicate the operational conditions and interactions of the system under test.这种模拟环境通常使用专用软件创建,可以复制被测系统的操作条件和交互。
By connecting the hardware components to the simulation, it becomes possible to evaluate their performance and identify potential issues without the need for actual deployment in a real-world setting.通过将硬件组件连接到模拟环境,可以在不需要在真实环境中实际部署的情况下评估其性能并识别潜在问题。
整车硬件在环(HIL)测试系统软硬件介绍
代码自动生成,与Matlab的无缝连接 直接访问实时系统 图形化显示,实时在线设计和调整
• 内容概述
• 基于dSPACE的系统开发模式 • RTI/RTW的使用 • Control Desk的使用 • 实例
• RTI/RTW的使用
Simulink框图
RTI: 硬件接口程序
RTW: 代码自动生成
dSPACE控制板
选择对应的 编译方法
生成*.sdf文件
Block reduction 设置为“Off”
• 一些注意点
• Simulink中的“Fcn”模块不能使用 • 其它工具箱中的模块多不能使用(DSP工具
箱中的“Filtering”模块可用) • 仿真参数设置窗口中的“Block reduction”一
定设置为“Off” • 编译出现RTI错误,可尝试新建*.mdl文件 • AutoBox开启状态下,编译完成后会自动下载
菜单栏
工具栏设置菜单 (右键点击工具栏)
工具栏
浏览器
视窗
虚拟仪器
工具窗口 状态栏
• 常用工具
• 日志观察器(Log viewer)
– 观察ControlDesk的行为 – 错误信息
工具窗口
•常用工具
• 平台浏览器(Platform manager)
– 设置与硬件的连接,创建/清除平台注册文件 – 浏览平台,控制实验过程 – 下载*.sdf文件
代码;否则仅生成*.sdf文件
• RTI的高级应用 • 中断处理(软件和硬件中断) • 定时器的调用 • 多任务的处理 • 非周期系统的处理(触发和使能系统)
• 内容概述
• 基于dSPACE的系统开发模式 • RTI/RTW的使用 • Control Desk的使用 • 实例
hil 测试概念

hil 测试概念hil测试概念简介hil测试(Hardware-in-the-Loop Testing)是一种将实际硬件与仿真环境相结合的测试方法,以验证硬件系统的性能和功能是否达到要求。
它能够更真实地模拟实际工作环境下的各种情况,对硬件系统进行全面的测试和评估。
相关概念1.硬件系统(Hardware System): 指待测试的实际硬件系统,可以是电子设备、机械装置等。
2.仿真环境(Simulation Environment): 指模拟硬件系统运行环境的虚拟环境,通常使用计算机软件来实现。
3.模型(Model): 仿真环境中用来描述硬件系统行为的数学模型或逻辑模型,通常使用数学方程或代码来表示。
4.接口(Interface): 用于连接硬件系统与仿真环境的接口,可以是传感器、执行器或其他通信设备。
5.测试用例(Test Case): 描述了对硬件系统进行测试的具体步骤和条件,通常包括输入信号、期望输出等信息。
6.数据记录(Data Logging): 在测试过程中记录硬件系统的输入输出数据,用于后续的分析和评估。
7.实时性(Real-time): hil测试通常要求仿真环境能够以与实际环境相同的速度和时序进行运行,以实现逼真的测试结果。
相关内容在hil测试中,通常包括以下几个步骤:1.系统建模与仿真环境搭建:根据硬件系统的特性和要求,建立相应的数学模型或逻辑模型,并利用仿真软件搭建仿真环境。
2.接口设计与连接:根据硬件系统的接口要求,设计并连接合适的传感器、执行器或通信设备,实现硬件系统与仿真环境的相互作用。
3.测试用例设计与执行:根据测试目标和要求,设计测试用例,并在仿真环境中执行测试,记录硬件系统的输入输出数据。
4.数据分析与评估:对测试过程中的数据进行分析,评估硬件系统的性能和功能是否满足要求,并对可能存在的问题进行排查和修复。
5.结果验证与优化:根据测试结果,对硬件系统进行验证,并根据测试结果进行性能优化或功能改进。
硬件在环仿真(HIL):NI领先汽车测试关键之匙
硬件在环仿真(HIL):NI领先汽车测试关键之匙美国国家仪器有限公司(National Instruments, 简称NI)于日前参加了在上海光大会展中心举办的2015年汽车测试及质量监控博览会。
在此次博览会上,NI联合多家业内合作伙伴,集中展示了NI为汽车行业提供的灵活开放式的测试平台与多样化的解决方案。
2015年是汽车测试及质量监控博览会举办的第十个年头,它已确立为向中国汽车工业展示确保质量、可靠性、耐久性和安全性的各种技术与服务的行业内头号展会。
会上逾280家公司展示了自己的新产品,具体领域包括:发动机/排气测试;车辆动力学测试;材料测试以及碰撞测试等。
NI也借助此次盛会向企业及大众展示了NI 在汽车行业的技术优势与优质解决方案。
据了解,现今几乎所有的汽车OEM与一级供应商在各类测试应用中均有使用或集成了NI产品。
通过为控制、设计和测试提供通用平台,NI 帮助用户节省了在汽车研发到生产各个阶段耗费的成本和时间。
凭借业内领先的I/O、灵活现成的硬件、强大高效的LabVIEW开发环境,用户可以创建适合各种应用的解决方案。
目前NI的产品在汽车行业涉及了车载测试和数据记录、硬件在环仿真、台架测试与控制、快速控制原型、生产线测试、车载信息娱乐系统测试等几大应用。
此次博览会上,NI着重展示了其业内权威的硬件在环仿真(HIL)技术方面的应用。
NI通过其创新的低成本模块化硬件和软件平台帮助工程师和科学家设计并建立自己的HIL系统。
硬件在环HIL仿真技术可以使用NI PXI实时控制器运行仿真模型来模拟受控对象的运行状态,配合NI FPGA模块可适应更高动态特性及更高精度的模型应用需求。
NI硬件在环测试平台具有开放的软硬件技术架构,可以减少工程师的开发时间、成本和风险。
在支持第三方硬件和软件建模工具的同时,NI还提供一系列高性能模拟和数字I/O设备,CAN、LIN和FlexRay总线接口,故障注入硬件等硬件,让客户可以高效实现应用。
硬件在环仿真技术在汽车工程教学中的应用
硬件在环仿真技术在汽车工程教学中的应用摘要:硬件在环仿真技术不仅提出新观点而且提供新的思想进课堂。
此技术大大有助于训练学生建构方法,研究,测试,寻求解决方案,有科研人员的头脑并深入思考问题。
然而,现阶段传统的教学方式存在不足,故硬件在环仿真实验开始逐渐替代传统的教学模式。
本文利用硬件在环实例进行讲解,从而体现出它的优势。
【关键词】:^p :硬件在环;汽车工程;教学目前虚拟仿真技术在实践教学中的应用已成为趋势,特别是硬件在环仿真的应用可以弥补实验硬件条件的不足,尤其在高等教育大众化背景下,到实际工厂企业实践不足的难题,也是对卓越工程师培养实践条件的有力支撑。
汽车学院将结合车辆工程、汽车服务工程、能动力工程的特点进行汽车及其零部件虚拟设计、加工、装配、维修、营销服务、发动机、汽车智能控制等进行硬件在环仿真、实践内容、训练方法等研究,以提高实践教学的效果。
一、硬件在环仿真系统简介硬件在环(HIL,hardware-in-the-loop)仿真,又称半实物仿真,是将需要仿真的部分系统硬件直接放到仿真回路中的仿真系统,它不仅弥补了纯数字仿真中的许多缺陷,提高了整个模型的置信度,而且可以大大减轻编程的工作量。
这种仿真的另一个优势在于它实现了仿真模型和实际系统间的实时数据交互,使仿真结果的验证过程非常直观,大大缩短了产品开发周期。
仿真时,电脑与实际硬件通过各种信息通道相连,电脑与实际硬件共同完成仿真工作,并将仿真结果在电脑中进行分析^p ,从而判断硬件的运行情况。
二、应用案例本文以汽车制动系统为例,来讲解硬件在环仿真技术在汽车工程教学中的应用。
研究制动系统之前,必须要了解掌握汽车的理论知识。
学生要通过学得的知识来设定制动系统的控制策略。
如果仅限于教师的传统课题讲授,学生难以完全掌握其中的要领,教学效果不佳。
此系统我们选择制动系统液压总成(HCU,High Care Unit)为实物,一般由增压阀(常开阀)、减压阀(常闭阀)、回液泵、储能器组成。
技术前沿!电机驱动系统硬件在环仿真测试
技术前沿!电机驱动系统硬件在环仿真测试随着节能减排、绿色生活的概念逐渐深入人心,新能源发电系统与新能源电动汽车在生活中的应用越来越广泛。
在风力发电系统和新能源电动汽车的电驱动系统中,电机控制是热门而关键的研究课题。
不过对于研究人员而言,新能源系统与电动汽车中的电机功率都相对较高,像一些极限工况、环境因素等研究条件不便于在实物系统上实现;同时,对于电机驱动与控制系统的研发与生产,传统的开发方式存在周期长、迭代慢、可靠性差的问题。
硬件在环仿真测试(Hardware-In-the-LoopTesting,HIL)作为高效的研发工具,能够帮助科研人员更好地进行原型开发、算法验证,在保证产品质量的同时有效缩短研发周期,在节省成本的同时加速成果的产出。
HIL的概念与价值硬件在环仿真(也被称为半实物仿真)是随着计算机硬件技术、实时操作系统、电力系统建模等新技术发展起来的实验和研究方式,硬件在环仿真装置的基本原理是用运行着数学模型的实时系统来模拟物理系统的行为,通过实际的I/O接口与控制器相连,不仅利用了软件建模的灵活性,也具有替代实物系统的能力。
对于电机驱动系统的开发与测试来说,通过硬件在环仿真能够在很接近真实工况的情况下对控制板整体(板上芯片运行的控制算法,板子的IO通道等)进行测试,具有易于测试故障工况,易于实现测试自动化,易于重现各种工况等优点。
硬件在环仿真测试的系统结构框图如下所示:ModelingTech利用自主研发的StarSimHIL软件,提供高性能且使用方便的硬件在环仿真平台,帮助用户方便地将电力电子或电力系统拓扑模型下载到实时仿真器上。
其基于FPGA的小步长仿真技术,能够准确而实时地模拟出被控对象的特性,帮助用户在研发与测试阶段创造安全与高效的实验环境。
StarSimHIL是基于配置型的实时仿真上位机软件,支持载入Simulink/SimPowerSystems环境下搭建的拓扑模型到FPGA硬件上运行,无需用户进行额外的模型转换与底层开发工作。
硬件在环

首先要明确几个概念:对于一个控制系统,一定要有的基础元素是控制器和被控对象。
举个例子,一个简单的灯泡,控制灯泡亮灭的开关就是控制器,灯泡本身就是控制对象。
当然这个控制系统是单向的,这样的控制系统就叫“开环的”,现在的先进控制系统多是“闭环的”:被控对象通过传感器把自己的状态传给控制器,控制器根据这些状态信息,通过执行器控制被控对象改变状态,循环往复。
HIL就是解决闭环系统的控制器测试问题的。
1、HIL的作用HIL的作用是用数学模型来模拟被控对象,跟控制器链接成闭环,“欺骗”控制器,让控制器以为它控制的是一个真实的被控对象,从而达到测试控制器的目的。
有点拗口,举个例子:假想“你的头和你的手”构成一个控制系统,大脑就是控制器,手就是被控对象,眼睛就是传感器。
大脑控制手向左移动一米,眼睛要时刻盯着手,看到底有没有移动一米。
这时为了测试大脑这个控制器的功能是否正常,HIL就可以发挥作用了,HIL就是一个高性能的电脑,它上面运行了复杂的算法(数学模型),现在可以把你的手和眼睛拆掉了,只把大脑连接到HIL上,HIL这台电脑会模仿眼睛输出一堆视频信号传输给大脑,让大脑以为它自己还能看得见;HIL又跟大脑控制手动作的接口连接,让大脑以为自己还有手,这样大脑控制手左移1米,这个控制命令就传输到HIL里,HIL就通过内部算法解析,然后输出一个手在左移的动画给大脑,这样大脑就被欺骗了,以为自己还在控制一个真实的手。
这有什么用处?主要可以完成对大脑功能的测试,比如大脑想控制手一万次向左移一米,看其中有多少次能移动到位,用真手测试就把手累抽筋了,用HIL模拟手,只要有电,一直测下去也没问题(自动测试、重复测试);比如要测大脑控制手去拍钉子,用真手就变一次性的了,用HIL假手测就没问题(极限工况测试),等等。
以汽车行业为例,测试车上的控制器系统,要是做辆真车来测试,不止成本高,而且测试还需要有场地,有人来开车。
如果要看车侧滑时ESP有没有起作用,那就要有车侧滑的场景,这样测试是很危险的,所以用HIL仿真就省事多了。
硬件在环实验报告

一.实验目的1.了解混合动力电动汽车动力总成结构及动力传递路线;2.掌握丰田Prius电子无级变速器(ECVT)工作原理;3.熟悉Matlab/simulink的建模仿真过程。
二.实验原理硬件在环仿真(hardware-in-the-Loop,HIL)是指用数字仿真机模拟被控对象,通过接口与真实的控制器相连,以此模拟受控对象的运行状态,对控制器进行测试和功能验证。
由于试验成本相对较低,HIL在汽车、飞机、电力系统等行业都有广泛应用。
本次实验主要以丰田混合动力汽车第二代Prius的电动力系统为对象,对其工作过程进行分析与仿真,Prius的动力系统结构如图1所示。
图1 第二代Prius传动系统结构1.发动机;2.扭转减震器;3.MG1;4.动力分配装置;5.MG2;6.传动链;7.中间齿轮;8.主减速器齿轮;9.驱动桥THS-Ⅱ(第二代丰田混合动力系统)使用发动机和电动机(MG2)提供的两种动力,并使用MG1作为发电机,通过动力分配装置把发动机的动力进行解耦并通过齿圈把发动机和MG2的动力输出驱动车辆。
根据不同的车辆行驶状况优化组合这两种动力,使发动机持续工作在最优工作区间,在保证动力性能的同时达到省油的目的。
THS的核心就在于它的电机和动力分配装置组成的电子无级变速器(ECVT),这套ECVT系统与传统CVT的变速原理完全不同,它其实是一项动力分配技术,而不是真正意义上的变速装置。
与传统变速器相比,ECVT的结构更简单,成本更低廉,同时它能承受更大的软件,但是由于对电机和离合器等的写作提出了非常高的要求,其控制软件更加复杂。
根据行星齿轮机构的特性方程,可以使用模拟杠杆来表示行星齿轮各部件的转速关系,进而详细介绍ECVT 的工作原理,式(1)为行星齿轮机构的特性方程。
0)1(c =+-+ωβωβωs r (1)s ω为太阳轮转速,r ω为齿圈转速,c ω为行星架转速,6.23084===s r N N β 杠杆的3个节点的相对位置由太阳齿轮(MG1)与齿圈(MG2)的齿数确定,相对于水平基准位置,同侧表示转速关系相同、异侧表示运转方向相反,相对于基准位置的高度相似于转速。
自动驾驶汽车硬件在环测试技术概述

Self-driving 自动驾驶自动驾驶汽车硬件在环测试技术概述文/王敏委基于模拟仿真机制的在环测试是自动驾驶汽车研 发测试的重要过程,可以在多种虚拟场景下对车辆性 能和车辆控制算法进行低成本且高效的验证。
在车辆 研发的v形体系中,硬件在环测试是针对各个车辆电 子控制单元(ECU)进行功能、性能的测试验证。
一 般的硬件在环(HIL)测试平台可以分为四层:车辆仿 真层、传感器仿真层、场景仿真层和硬件电子控制单 元(ECU)层。
HIL测试平台可以实现多种功能的测 试验证,主要用于以下任务:构建汽车运动模型、各 种传感器模型和虚拟测试场景并开展测试;对环境感 知、路径规划、决策、车辆控制、通信与交互等算法 进行闭环评估;推动上述算法从虚拟环境到真实自动 驾驶汽车的快速移植。
1简介在环测试和实车测试是用来验证和优化自动驾驶 汽车的感知、控制等算法的主要技术。
由于自动驾驶 汽车引入了大量的新技术,有必要在技术完全成熟之 前通过在环测试对这些基于人工智能的感知和控制算 法进行预先测试评估,因此在环测试渐渐成为自动驾 驶汽车研发的强制性步骤。
传统的实车测试是一种费 时费力且成本高的测试方法,只能进行有限数量的场 景测试。
相比之下,在环测试使用了和实际车辆比较 一致的仿真传感器、车辆和交通场景,提供了一种经 济效益和测试效果比较均衡的测试环境。
通过以往的 各种自动驾驶智能算法研究和实验,验证了这种在环 测试方法在车辆功能-麵口性能分析上的高效性。
一般地,硬件在环(HIL)测试平台结构框架如图 1所示,包含多种仿真软件接口和硬件ECU接口,各 个接口组合成一个高效的封闭测试验证循环。
仿真软 件接口包含3部分:一是控制车辆运动的车辆仿真模型;二是产生车辆数据的各种传感器仿真模型;三是 模拟真实道路场景的虚丨以测试环境。
5更件ECU接口则 包含了真实的车辆ECU。
仿 口K=3H Z3■车》状志传W Im&mB f pr■孕•K&f is S t t iSB-------------------^自功《饕汽李实车平台m c m s a i M u t法V i--------**CAN!j•a a s M金■a s m____ii——1L-—-t---ts v;*畔在仿霣测试T图1自动驾驶汽车硬件在环测试平台组成仿真软件接口可以运行包括各种车辆软件,模拟 测试平台上任何所需的对象。
HIL系统在车身控制单元系统测试验证应用
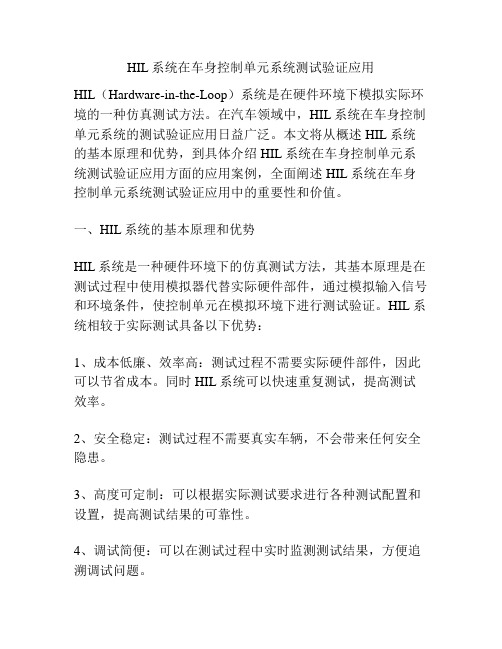
HIL系统在车身控制单元系统测试验证应用HIL(Hardware-in-the-Loop)系统是在硬件环境下模拟实际环境的一种仿真测试方法。
在汽车领域中,HIL系统在车身控制单元系统的测试验证应用日益广泛。
本文将从概述HIL系统的基本原理和优势,到具体介绍HIL系统在车身控制单元系统测试验证应用方面的应用案例,全面阐述HIL系统在车身控制单元系统测试验证应用中的重要性和价值。
一、HIL系统的基本原理和优势HIL系统是一种硬件环境下的仿真测试方法,其基本原理是在测试过程中使用模拟器代替实际硬件部件,通过模拟输入信号和环境条件,使控制单元在模拟环境下进行测试验证。
HIL系统相较于实际测试具备以下优势:1、成本低廉、效率高:测试过程不需要实际硬件部件,因此可以节省成本。
同时HIL系统可以快速重复测试,提高测试效率。
2、安全稳定:测试过程不需要真实车辆,不会带来任何安全隐患。
3、高度可定制:可以根据实际测试要求进行各种测试配置和设置,提高测试结果的可靠性。
4、调试简便:可以在测试过程中实时监测测试结果,方便追溯调试问题。
二、HIL系统在车身控制单元系统测试验证应用方面的具体案例HIL系统在车身控制单元系统测试验证应用方面应用价值巨大。
以下将具体介绍几个案例:1、车身动力学仿真测试:HIL系统可以模拟不同驾驶情况下的汽车行驶状态,比如高速行驶、加速、制动、急转等。
通过改变输入参数,对车身控制单元进行测试,提高系统的稳定性和响应速度。
2、碰撞仿真测试:HIL系统可以模拟不同的碰撞情况,比如正面碰撞、侧面碰撞、倾覆等。
通过验证控制单元在不同碰撞情况下的控制策略,提高系统的安全性。
3、路面模拟测试:HIL系统可以模拟各种路面条件,比如平整路面、泥泞路面、石子路面等,通过对不同路面条件下车身控制单元的测试验证,提高系统对各种路况的适应性和稳定性。
4、电子制动系统测试:HIL系统可以模拟不同的电子制动控制策略,比如ABS、EBA、ESP等。
硬件在环解决方案_HIL_ECU测试_Labcar

PT-LABCAR
P T- L A B C A R 是 一 个 开 放 式 的 可 扩 展 硬 件 在 环 系 统 (HiL)(见图1)。它专门用于对动力总成ECU进行开 环和闭环测试。该系统可运行自动重复功能测试以 发布软件参数版本,还可在ECU开发的早期阶段验 证其控制和诊断功能。PT-LABCAR系统还可用于在 实验室中对ECU进行预标定。
一 系 列 高 性 能 技 术 特 征 确 保 了 PT-LABCAR系统功能的多样性。例如,信号生成 通道的耦隔离支持发动机爆震传感器的 精确仿真,同时还可以对ECU进行实时 访问。
PT-LABCAR先 进 的 软 件 功 能 还 可 满 足 ECU开发过程中的各种特殊要求,如可提 供有效的参数操控等。同时,该系统可与 LABCAR-AUTOMATION结合使用,进一 步简化了与复杂应用及各种工具的集成。
PT-LABCAR 动力总成应用中的硬件在环系统
功能一览
可扩展式硬件在环(HiL)系统适于开环及闭环测试 先进的线路连接结构,包括标准化的ECU连接器针 脚分配 通过测量和标定工具进行同步数据采集 带实时操作系统的标准PC 可与各种建模工具完美集成 带软件配置模板,如用于仿置
名称
LABCAR 系统基础 LABCAR系统软件包 LABCAR 系统软件包服务合同 PT-LABCAR 发动机ECU I/O模块 PT-LABCAR 变速箱ECU I/O模块 (按用户要求提供) PT-LABCAR 断接盒 LABCAR 系统测量与标定工具 LABCAR 系统故障模拟模块 LABCAR 系统升级电源 附加信号I/O模块
PT-LABCAR接线盒 PT-LABCAR发动机ECU I/O
可用户化的部件, LABCAR或第三方硬件
Hil在汽车整车测试及开发系统中的应用
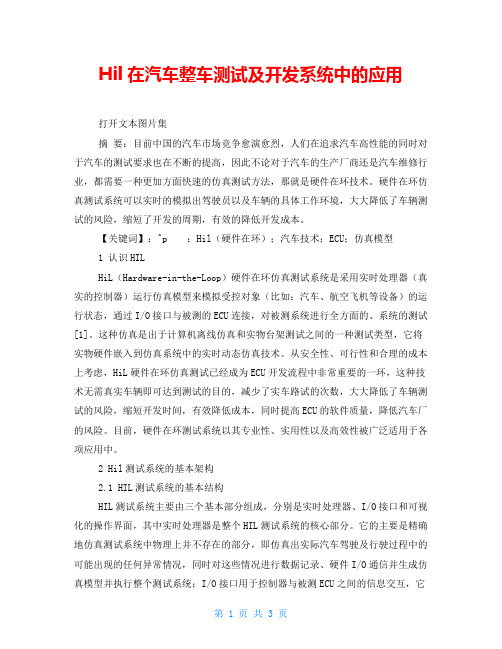
Hil在汽车整车测试及开发系统中的应用打开文本图片集摘要:目前中国的汽车市场竞争愈演愈烈,人们在追求汽车高性能的同时对于汽车的测试要求也在不断的提高,因此不论对于汽车的生产厂商还是汽车维修行业,都需要一种更加方面快速的仿真测试方法,那就是硬件在环技术。
硬件在环仿真测试系统可以实时的模拟出驾驶员以及车辆的具体工作环境,大大降低了车辆测试的风险,缩短了开发的周期,有效的降低开发成本。
【关键词】:^p :Hil(硬件在环);汽车技术;ECU;仿真模型1 认识HILHiL(Hardware-in-the-Loop)硬件在环仿真测试系统是采用实时处理器(真实的控制器)运行仿真模型来模拟受控对象(比如:汽车、航空飞机等设备)的运行状态,通过I/O接口与被测的ECU连接,对被测系统进行全方面的、系统的测试[1]。
这种仿真是出于计算机离线仿真和实物台架测试之间的一种测试类型,它将实物硬件嵌入到仿真系统中的实时动态仿真技术。
从安全性、可行性和合理的成本上考虑,HiL硬件在环仿真测试已经成为ECU开发流程中非常重要的一环,这种技术无需真实车辆即可达到测试的目的,减少了实车路试的次数,大大降低了车辆测试的风险,缩短开发时间,有效降低成本,同时提高ECU的软件质量,降低汽车厂的风险。
目前,硬件在环测试系统以其专业性、实用性以及高效性被广泛适用于各项应用中。
2 Hil测试系统的基本架构2.1 HIL测试系统的基本结构HIL测试系统主要由三个基本部分组成,分别是实时处理器、I/O接口和可视化的操作界面,其中实时处理器是整个HIL测试系统的核心部分。
它的主要是精确地仿真测试系统中物理上并不存在的部分,即仿真出实际汽车驾驶及行驶过程中的可能出现的任何异常情况,同时对这些情况进行数据记录、硬件I/O通信并生成仿真模型并执行整个测试系统;I/O接口用于控制器与被测ECU之间的信息交互,它也可是用来产生某些产生激励信号,进行各种模拟信号、数字信号和总线信号的通信及数据传输。
hil测试用例设计方法
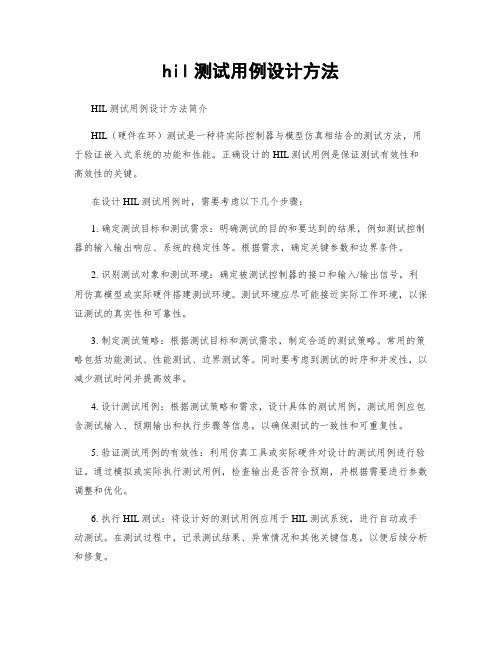
hil测试用例设计方法HIL测试用例设计方法简介HIL(硬件在环)测试是一种将实际控制器与模型仿真相结合的测试方法,用于验证嵌入式系统的功能和性能。
正确设计的HIL测试用例是保证测试有效性和高效性的关键。
在设计HIL测试用例时,需要考虑以下几个步骤:1. 确定测试目标和测试需求:明确测试的目的和要达到的结果,例如测试控制器的输入输出响应、系统的稳定性等。
根据需求,确定关键参数和边界条件。
2. 识别测试对象和测试环境:确定被测试控制器的接口和输入/输出信号,利用仿真模型或实际硬件搭建测试环境。
测试环境应尽可能接近实际工作环境,以保证测试的真实性和可靠性。
3. 制定测试策略:根据测试目标和测试需求,制定合适的测试策略。
常用的策略包括功能测试、性能测试、边界测试等。
同时要考虑到测试的时序和并发性,以减少测试时间并提高效率。
4. 设计测试用例:根据测试策略和需求,设计具体的测试用例。
测试用例应包含测试输入、预期输出和执行步骤等信息,以确保测试的一致性和可重复性。
5. 验证测试用例的有效性:利用仿真工具或实际硬件对设计的测试用例进行验证。
通过模拟或实际执行测试用例,检查输出是否符合预期,并根据需要进行参数调整和优化。
6. 执行HIL测试:将设计好的测试用例应用于HIL测试系统,进行自动或手动测试。
在测试过程中,记录测试结果、异常情况和其他关键信息,以便后续分析和修复。
7. 分析和评估测试结果:对测试结果进行分析和评估,比较实际输出与预期输出的差异。
根据分析结果,确定问题的原因和解决方案,并进行必要的修复和优化。
8. 正式发布测试报告:根据测试结果和分析,撰写详细的测试报告。
报告中应包含测试目标、测试方法、测试结果和分析、问题和建议等内容,为后续工作提供参考。
通过以上HIL测试用例设计方法,可以有效保证测试的准确性和可靠性,提高产品的质量和稳定性。
同时,持续改进测试用例设计方法也是提高测试效率和降低成本的重要手段。
基于CarSim的电动助力转向系统仿真与硬件在环验证

基于CarSim的电动助力转向系统仿真与硬件在环验证一、本文概述随着汽车工业的快速发展,电动助力转向系统(Electric Power Steering, EPS)已成为现代车辆的重要组成部分。
EPS系统不仅提高了驾驶的便捷性和舒适性,同时也对车辆的操纵稳定性和安全性起着至关重要的作用。
然而,EPS系统的设计和优化面临着众多挑战,包括系统性能的优化、安全性的保障以及成本的控制等。
因此,对EPS系统进行精确而高效的仿真分析以及硬件在环验证成为了研究和开发过程中的关键步骤。
本文旨在介绍基于CarSim的电动助力转向系统仿真与硬件在环验证的研究方法和技术。
本文将概述EPS系统的基本原理和结构,以及其在车辆动力学中的作用。
本文将详细介绍CarSim仿真软件在EPS 系统仿真中的应用,包括建模过程、仿真参数设置以及仿真结果的分析和处理。
接着,本文将探讨硬件在环验证的重要性,以及如何在CarSim环境中实现硬件在环验证。
本文将通过实例分析,展示基于CarSim的EPS系统仿真与硬件在环验证的实际应用效果,为EPS系统的设计和优化提供有效的技术支持。
通过本文的研究,旨在为EPS系统的研究者和工程师提供一种基于CarSim的仿真与硬件在环验证的方法论,以提高EPS系统的开发效率和性能优化,为现代汽车工业的发展做出贡献。
二、EPS系统原理及CarSim仿真建模电动助力转向系统(EPS,Electric Power Steering)是一种先进的汽车转向系统,旨在通过电机提供辅助转向力矩,以提高驾驶的舒适性和安全性。
EPS系统主要由转向传感器、车速传感器、电机、电子控制单元(ECU)等组成。
当驾驶员转动方向盘时,转向传感器检测方向盘的转角和转速,车速传感器则检测车辆的速度。
这些信息被传递给ECU,ECU根据预设的控制策略计算出所需的辅助转向力矩,并控制电机产生该力矩,从而帮助驾驶员更轻松、更稳定地驾驶汽车。
为了对EPS系统进行仿真分析,我们采用了CarSim软件。
智能车硬件在环仿真系统的设计与实现

3、故障诊断与恢复
HiL系统在运行过程中可能会遇到各种故障和异常情况,为了保证系统的稳定 性和可靠性,需要实现故障诊断和恢复机制。在实际应用中,可以使用故障诊 断专家系统、自适应滤波等方法进行故障诊断和恢复。
结论:
智能车硬件在环仿真系统是一种有效的智能汽车研发测试方法,它可以提高车 辆的安全性、舒适性和环保性能。通过HiL系统的设计和实现,可以在车辆实 际制造之前对控制算法、决策策略、系统性能等进行全面评估和优化,降低车 辆研发和测试成本,缩短车辆研发周期。
谢谢观看
2、仿真环境设计
仿真环境是HiL系统的核心部分,其精度和真实性直接影响到测试结果的可信 度。因此,需要建立高精度的车辆模型、传感器模型和道路环境模型。在实际 应用中,可以使用现有的仿真软件平台进行二次开发,如MATLAB/Simulink、 Prescan等,以满足特定需求。
3、实时操作系统设计
未来随着智能汽车技术的不断发展,HiL系统也将不断改进和完善,为智能汽 车的研发和应用提供更强大的支持。
参考内容
随着可再生能源在全球能源结构中的地位日益提升,风能作为一种重要的可再 生能源,得到了广泛的应用和发展。风电变流器作为风力发电系统中不可或缺 的部分,其性能和稳定性对整个风电系统的运行有着重要影响。本次演示主要 探讨了风电变流器的RTLAB硬件在环仿真系统设计与实现方法。
智能车硬件在环仿真系统的设 计与实现
目录
01 一、智能车硬件在环 仿真的概念
03
三、智能车硬件在环 仿真系统的实现
02
二、智能车硬件在环 仿真系统的设计
04 参考内容
随着科技的快速发展,智能汽车已经成为现代交通领域的重要组成部分。为了 在激烈的市场竞争中保持领先地位,许多汽车制造商和研发机构都在积极探索 和研究新的技术,以提高汽车的安全性、舒适性和环保性能。其中,智能车硬 件在环仿真系统(Hardware-in-the-Loop Simulation,简称HiL)作为一种 有效的仿真测试方法,被广泛应用于智能汽车的研发过程中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
41
SimDriveline库:Vehicle Components
汽车部件库包括4种元件: 引擎(汽油机、柴油机) 轮胎 纵向车辆动力学模型 这些模型的主体部分也都 是由simulink搭建而成的
42
引擎
引擎模型有两种(汽油机 和柴油机) 引擎模型是传动系的扭矩 发生端,输入量为节气门 开度 输入的参数都是相同的, 不同是模型对输入参数的 处理 参数:发动机的峰值功率 及对应的转速、发动机的 最高转速
车的质量(m) 质心的位置 (m) 迎风面积 (m2)
空气阻力系数Cd 车在水平方向山的初速度(m/s)
46
车辆纵向动力学原理
47
示例 >>drive_4wd_dynamics
48
建立SimDriveline 模型的一般步骤
确定转动惯量 确定传动约束(gears) 确定传动连接件(如离合器) 确定系统的扭矩输入和运动输出 确定求解方式 运行,观察结果
24
把直齿轮改为变速齿轮
25
把直齿轮改为行星齿轮
26
SimDriveline 库:Dynamic Elements
动态元素库包括4种元件: Controllable Friction Clutch Torque Converter Hard Stop Torsional Spring-Damper 这些模型主要是由基本的 Simulink 模块搭建而成的, 使用之前应略微了解他们的 建模原理
28
Clutch原理
P < Pth unengaged P ≥ Pth engaged(but not locked)
动摩擦力矩=μ*(Number of friction disks)*(effective torque radius)*(peak normal force)*(normalized pressure – pressure threshold);
8
SimDriveline 库
SimDriveline 库
Solver&Inertia Gears Force Elements
Transmission Templates
Sensors & Actuators Utilities Vehicle Component
>> drivelib
9
实例
16
SimDriveline 库:solve & inertias
Solver & inertias 库入右图所示
17
Env模块设置
Env模块是对 整个 模型进行 仿真环境的测 试 仿真模式: Dynamics和 Linearization
18
inertia定义转动惯量 ; housing用于连接没有转动的部件 ; Shared Environment 把不同系统设置为同样的 仿真环境
Torque Actuator是扭矩施加 模块。连接从simulink 传递 来的扭矩 Torque Sensor是扭矩传感 器B是驱动端F是被动端, Tor为扭矩向simulink 输出端 口 同理有Motion Actuator和 Motion Sensor IC模块定义了转动件的初始 转速(rad/s)
locked
静摩擦力矩=(Static friction peak factor)*(Kinetic friction torque for ω → 0)
29
可控摩擦片式离合器参数配置
参数包括:
摩擦片的数目 有效扭矩半径 峰值应力 动摩擦系数 静摩擦系数 应力的阀值 速度偏差 初始状态锁止 滑动转速输出端口(S) 功率损失输出端口(L) 状态输出端口(M)
注意:添入齿数比的时候,数值一定为正数
21
实例:扭矩驱动直齿轮转动
建立一个用sine波的扭矩来驱动一个传动比为2 的直齿轮, 所有轴的转动惯量为1
观察该系统在10秒后齿轮驱动端与被动端的扭矩和速度情 况
22
实例(续)
23
练习:修改实例
1 把直齿轮改为变速齿轮 2 把直齿轮改为行星齿轮
35
>> drive_hard_stop
36
Torsional Spring-Damper
扭转弹簧减震器模型代表 用扭转弹簧连接的两段轴 的传动 参数:
刚度 阻尼 初始偏移量 自由行程
示例 >>drive_spring
37
Torsional Spring-Damper原理
车轮滚动半径(m) 额定负荷(N) 额定负荷是的峰值纵向牵引力 (N) 额定负荷下的峰值滑动率(%) 轮胎的接地长度(m)
45
车辆动力学模型
这是一个两轴,4轮的车 辆动力学模型 输入量为前轮驱动力Fxf, 后轮驱动力Fxr及车辆所 在的路面坡度β;输出量 为该车的车速和前后轮负 荷Fzf, Fzr 参数:
33
Hard Stop
限位器模型是一个在限制 轴向运动在一定范围内的 模型,当达到它运动的上 下限的时候产生弹性变形 参数:
相对距离的上下限(rad) 接触刚度 接触阻尼
示例 >> drive_hard_stop
34
Hard stop原理 θ = θF – θB τ = –k·(θ – θ±) – bωபைடு நூலகம்
40
SimDriveline库:Transmission Templates
变速箱模板库包含4种类 型的变速箱 这些变速箱都是由齿轮模 块和离合器模块组合而成 的。 通过查看“look under marks”可以看到这些变速 箱的模块搭建方式,每个 变速箱模板的图解界面描 述了该种变速箱的结构 建立用户自己的变速箱
43
引擎的原理 τ = T·g(Ω) g(Ω)=60/2/pi*P (Ω)/n P(Ω)=p0+p1*n+p2*n2 +p3*n3
44
轮胎
轮胎模型是整个传动系的 结束端 输入量为汽车在垂直方向 的负荷Fz和行使方向的速 度Vx;输出量为车轮的转 速Ω和纵向牵引力Fx 参数为:
(gRSs – 1)ωC = gRSs·ωR - ωSs (gRSl + 1)ωC = gRSl·ωR + ωSI
6
您可以利用 SimDriveline 图解式的模块界面建立您需要 的动力系统结构模型。
7
相关产品 需要以下 MathWorks 的产品: MATLAB 7.0.1 或以后 Simulink 6.1 或以后 SimDriveline
52
4档位simpson 变速箱子系统模型
53
观察运行结果
54
总结
模型库模型介绍 建模步骤
55
19
SimDriveline 库:gears
齿轮模型库包括8种类型的 齿轮,其中有基本齿轮如: Simple Gear Variable Ratio Gear Planet-Planet Ring-Planet 其它的都是由基本齿轮组合而成 的
20
组合齿轮
由基本齿轮组合而成的齿轮有Planetary Gear Dual-Ratio Planetary和 Ravigneaux 例如:Planetary Gear就是由Planet-Planet、Ring-Planet 组合而成的。
θ = θF – θB
τ = –k( θ – θback) – bω if θ > +θback τ = –k( θ + θback) – bω if θ < –θback τ = – bω if –θback < θ < +θback
38
>>drive_spring
39
练习
搭建变速箱 各连接杆转动惯量是0.0001kg/m^2 行星排的齿数比为2
执行机构 物理 系统 传感器
u
+ -
控制器
y
物理对象
4
SimDriveline 特征
SimDriveline 提供了动力及传动系统各种元件的模块, 如齿轮,旋转轴,离合器;标准传动装置(变速箱)模 版;引擎、轮胎及车辆 模型。SimDriveline 使对动力传 动系统的建模和仿真变得极为容易。 SimDriveline 提供了一个图解式的图形建模环境,每一 个模块代表一个元件,如齿轮、离合器、液力变矩器, 而连接元件的线就是传动轴
实例:运行一个drive_simpson 的模型
10
总结
SimDriveline 可以为我们做什么?
SimDriveline 是simulink 环境下用于特殊场合建模的
模型库,我们可以通过传感器和执行器把它与simulink 相连接 这个模型库中的包含了建立传动系统需要的各种部件, 如轴、转动惯量,离合器、变速箱等。 基于牛顿旋转动力学建立的。可以仿真模拟传动系的 运动情况
5
应用示例 rCiωC = rSsωSs + rPiωPi * rCi = rSs + rPi rCoωC = rSlωSl + rPoωPo ,*rCo = rSl + rPo (rCo - rCi)ωC = rPiωPi + rPoωPo , rCo - rCi= rPo + rPi rRωR = rCoωC + rPoωPo , rR = rCo + rPo
49
实例
实例:>>drive_simpson