传感与控制-P87C591内嵌CAN控制器的应用设计
有关单片机的毕业设计题目

有关单片机的毕业设计题目篇一:单片机毕业设计,电子毕业设计题目大全一单片机毕业设计题目,电子毕业设计题目1. 单片机接入Internet技术在智能小区中的应用与研究2. 基于PIC单片机的高压智能同步开关操纵系统设计3. 基于单片机的刚性转子现场动平稳测试系统的研制4. 基于单片机的现场多道核能谱数据搜集系统研究5. 单片机模糊操纵晶闸管直流调压系统的研究6. 单片机嵌入式TCP/IP协议的研究与实现7. 基于单片机的几何参数主动量仪和通用测控仪的研制8. 基于C8051单片机的足球机械人小车操纵系统设计9. 利用FPGA模拟实现8051单片机及其外设的功能10. 用于TDMoIP实现的E〈,1〉功能卡单片机操纵研究11. 基于MSP430单片机的数字式压力表的设计与实现12. 基于CAN总线的单片机流量操纵系统的研究13. 单片机和嵌入式系统开发平台化的研究14. 基于单片机语音识别系统设计15. 基于80C196KC单片机的舞蹈机16.基于单片机的工业缝纫机操纵系统研制17. 基于单片机的智能稳压电源18. PIC单片机中国市场拓展战略19. 基于FPGA与单片机20. 基于网络单片机21. 基于“单片机+CPLD/FPGA的程控互换机系统集成化设计22. ——单片机信号搜集及其通信操纵系统研究部份23. 弧焊逆变电源24. 单片机25. 单片机26. 单片机27. 应用28. 机自动调平操纵器的研究29. 机系统设计单片机的web效劳器的设计与实现语言的单片机设计实现的仿人智能PID操纵器33. 基于单片机的船舶柴油机冷却水温度操纵系统34. 基于单片机的活性炭测氡仪的研制35. 单片机静脉麻醉靶控输注系统的研制与应用36. 基于PC+单片机的环境风洞风速操纵系统的研究37. 基于CPLD和单片机的爆轰波数据搜集系统设计38. 基于单片机和DSP的卷绕操纵器数据搜集和通信设计39. 基于MSP430单片机的柴油发电机监控器的设计40. 基于CPLD/FPGA和单片机的爆速仪设计41. 基于单片机操纵的晶闸管中频感应电源的研制42. 基于十六位单片机的电力设备故障在线监测装置的设计与算法研究43. 基于SPCE061A单片机的语音识别系统的研究44. 基于PIC单片机的生物性能实验装置的研究45. 基于Motorola MC68HC08系列单片机演示系统的设计与实现46. 基于TCP/IP协议的单片机与INTERNET互连的设计与实现47. 基于嵌入式实时操作系统和TCP/IP协议的单片机测控系统48. AVR 8位嵌入式单片机在车载全世界定位系统显示终端中的应用49. 基于AVR单片机的250W HID灯电子镇流器的研究50. 基于单片机的TCP/IP技术研究及应用51. 基于P87C591单片机的CAN总线应用层协议的研究52. 基于单片机实现对二级倒立摆的操纵53. C8051FXXX系列单片机仿真器的研制54. 基于80C196MC单片机55. 基于单片机的胶印机操纵系统开发研究56. 基于凌阳单片机的二次压降全自动测量仪的研制57. 基于单片机的超声测距系统58. 基于MOTOROLA单片机59. 全站仪动态测量的研究和其与单片机用60. 一种基于80C196KC单片机61. 基于单片机的对讲系统的研究开发62. 基于单片机机温度操纵器的开发与研究63. 基于单片机ATmega12864. 基于单片机65. 基于单片机66. 采纳W78E5867. 基于单片机68. 基于69. 基于70. 基于的配电网综合参数测控仪研究71. 的单片机操纵研究Java虚拟机研究与设计单片机的温度监测系统和单片机的数据搜集与处置系统的设计单片机的在线测试技术的研究76. 分散式智能测控终端的研制——基于单片机的大容量固态存储技术的设计实现77. 基于单片机的定尺飞锯切割机操纵系统设计78. 基于196单片机的开关磁阻电机调速系统设计79. 基于EDA技术的兼容MCS-51单片机IP核设计80. 基于单片机的嵌入式USB主机研究与实现81. 单片机操纵持续固体激光器高频开关电源的研制82. 基于MSP430单片机的微机自动准同期装置83. 基于MSP430单片机中小型水轮机微机调速器的设计与研制84. 基于单片机的便携式心电监测系统的研究85. 基于单片机和CAN总线的混凝土搅拌站操纵系统设计86. 基于单片机的全位置自动焊接操纵系统的研究87. 工程机械冷却能力单片机操纵系统88. 基于单片机的电除尘集散操纵系统的并行数据搜集89. 基于单片机的磁酶免测定仪的研制90. 基于单片机的籽棉动态称重系统91. ZLG51单片机宏汇编器的设计与实现92. 基于单片机的轧机实验台散布式监测系统研究93. 基于单片机的DDD心脏起搏器的设计94. 来电显示单片机的设计95. 基于单片机操纵的能量回馈操纵系统的研究96. 基于单片机的步进电机式汽车仪表的设计与实现97. 基于微功耗单片机的水声遥控系统的研究98. 面向单片机接口的新型液晶显示操纵器的研制99. 基于单片机100. 单片机在汽车制动性能检测系统中的应用101. 基于单片机操纵的MAG102. 基于单片机AT89C2051103. 基于MSP430单片机的多功能104. 基于单片机的柴油发动机105. 单片机106. 80C196KC单片机中子和107. 汽108. 基于单片机109. 基于C8051110. 基于单片机效劳器在远程故障诊断中的应用111. 基于多高级用户板的设计与开发112. M在发动机台架实验中的应用研究113. 单114. 单片机操纵系统的研究的海水有机磷实时数据搜集与操纵系统单片机的石油倾点自动测量系统设计的直接数字频率合成(DDS)技术的应用研究片机模糊操纵在电加热炉温度操纵系统中的应用119. PIC单片机芯片在电涡流传感器温度补偿中的应用120. 基于C8051F单片机直流电动机反馈操纵系统的设计与研究121. 基于单片机的嵌入式Web效劳器的研究122. MOTOROLA单片机MC68HC(8)05PV8/A内嵌EEPROM的工艺和制程方式及对良率的阻碍研究123. 基于模糊操纵的电阻钎焊单片机温度操纵系统的研制124. 基于MCS-51系列单片机的通用操纵模块的研究125. 基于单片机实现的供暖系统最正确启停自校正(STR)调剂器126. 单片机操纵的二级倒立摆系统的研究127.基于增强型51系列单片机的TCP/IP协议栈的实现128. 基于单片机的蓄电池自动监测系统129. 基于32位嵌入式单片机系统的图像搜集与处置技术的研究130. 基于单片机的作物营养诊断专家系统的研究131. 基于单片机的交流伺服电机运动操纵系统研究与开发132. 基于单片机的泵管内壁硬度测试仪的研制133. 基于单片机的自动找平操纵系统研究134. 基于C8051F040单片机的嵌入式系统开发135. 基于单片机的液压动力系统状态监测仪开发136. 模糊Smith智能操纵方式的研究及其单片机实现137. 一种基于单片机的轴快流CO〈,2138. 基于双单片机冲床数控系统的研究139. 基于CYGNAL单片机的在线间歇式浊度仪的研制140. 基于单片机的喷油泵实验台操纵器的研制141. 基于单片机的软起动器的研究和设计142. 基于单片机操纵的高速快走丝电火花线切割机143. 基于单片机的机电产品操纵系统开发144. 基于PIC单片机的智能电话充电器145. 基于单片机146. 基于单片机147. 基于单片机148. 基于微型光谱仪的单片机149. 单片机150. 基于单片机151. 基于单片机152. 基于PIC153. 基于单片机154. 气操纵系统的研制155. 基于156. 基-数字转换器的研究157. 的光纤Bragg光栅解调系统的研究单片机的多生理信号检测仪的电机运动操纵系统设计ico专用单片机核的可测性设计研究162. 基于MCS-51单片机的热量计163. 基于双单片机的智能遥测微型气象站164. MCS-51单片机构建机械人的实践研究165. 基于单片机的轮轨力检测166. 基于单片机的GPS定位仪的研究与实现167. 基于单片机的电液伺服操纵系统168. 用于单片机系统的MMC卡文件系统研制169. 基于单片机的时控和计数系统性能优化的研究170. 基于单片机和CPLD的粗光栅位移测量系统研究171. 单片机操纵的后备式方波UPS172. 提升高职学生单片机应用能力的探讨173. 基于单片机操纵的自动低频减载装置研究174. 基于单片机操纵的水下焊接电源的研究175. 基于单片机的多通道数据搜集系统176. 基于uPSD3234单片机的氚表面污染测量仪的研制177. 基于单片机的红外测油仪的研究178. 96系列单片机仿真器研究与设计179. 基于单片机的单晶金刚石刀具刃磨设备的数控改造180. 基于单片机的温度智能操纵系统的设计与实现181. 基于MSP430单片机的电梯门机操纵器的研制182. 基于单片机的气体测漏仪的研究183. 基于三菱M16C/6N系列单片机的CAN/USB184. 基于单片机和DSP185. 基于单片机的膛壁温度报警系统设计186. 基于AVR单片机187. 基于单片机船舶电力推动电机监测系统188. 基于单片机网络的振动信号的搜集系统189. 基于单片机190. 基于单片机的叠图机191. 基于单片机嵌入式Web192. 基于AT89S52单片机193. 基于单片机194. 机操纵系统195. 基于单片机虚拟教学实验中的应用研究196. 基于单片机197. 基于的莫尔斯码自动译码系统设计与研究198. 基于199. 基200. 基的μC/OS-Ⅱ的研究201. 的一体化智能差示扫描量热仪系统研究协议的单片机与Internet互联的研究与实现单片机操纵器的研究γ-免疫计数器自动换样功能的研究与实现于单片机的倒立摆操纵系统设计与实现206. 单片机嵌入式以太网防盗报警系统207. 基于51单片机的嵌入式Internet系统的设计与实现208. 单片机监测系统在挤压机上的应用209. MSP430单片机在智能水表系统上的研究与应用210. 基于单片机的嵌入式系统中TCP/IP协议栈的实现与应用211. 单片机在高楼恒压供水系统中的应用212. 基于ATmega16单片机的流量操纵器的开发213. 基于MSP430单片机的远程抄表系统及智能网络水表的设计篇二:最新单片机毕业设计,电子毕业设计题目大全一单片机毕业设计题目,电子毕业设计题目1. 单片机接入Internet技术在智能小区中的应用与研究2. 基于PIC单片机的高压智能同步开关操纵系统设计3. 基于单片机的刚性转子现场动平稳测试系统的研制4. 基于单片机的现场多道核能谱数据搜集系统研究5. 单片机模糊操纵晶闸管直流调压系统的研究6. 单片机嵌入式TCP/IP协议的研究与实现7. 基于单片机的几何参数主动量仪和通用测控仪的研制8. 基于C8051单片机的足球机械人小车操纵系统设计9. 利用FPGA模拟实现8051单片机及其外设的功能10. 用于TDMoIP实现的E〈,1〉功能卡单片机操纵研究11. 基于MSP430单片机的数字式压力表的设计与实现12. 基于CAN总线的单片机流量操纵系统的研究13. 单片机和嵌入式系统开发平台化的研究14. 基于单片机语音识别系统设计15. 基于80C196KC单片机的舞蹈机械人操纵系统16. 基于单片机的工业缝纫机操纵系统研制17. 基于单片机的智能稳压电源18. PIC单片机中国市场拓展战略19. 基于FPGA与单片机的高精度电子经纬仪光电信号处置系统研制20. 基于网络单片机21. 基于“单片机+CPLD/FPGA机系统集成化设计22. ——单片机信号搜集及其通信操纵系统研究部份23. 弧焊逆变电源24. 单片机25. 单片机26. 单片机的研究与实现27. 单片机应用28. 基于机自动调平操纵器的研究机系统设计单片机的web效劳器的设计与实现语言的单片机设计实现的仿人智能PID操纵器基于单片机的船舶柴油机冷却水温度操纵系统34. 基于单片机的活性炭测氡仪的研制35. 单片机静脉麻醉靶控输注系统的研制与应用36. 基于PC+单片机的环境风洞风速操纵系统的研究37. 基于CPLD和单片机的爆轰波数据搜集系统设计38.基于单片机和DSP的卷绕操纵器数据搜集和通信设计39. 基于MSP430单片机的柴油发电机监控器的设计40. 基于CPLD/FPGA和单片机的爆速仪设计41. 基于单片机操纵的晶闸管中频感应电源的研制42. 基于十六位单片机的电力设备故障在线监测装置的设计与算法研究43. 基于SPCE061A单片机的语音识别系统的研究44. 基于PIC单片机的生物性能实验装置的研究45. 基于Motorola MC68HC08系列单片机演示系统的设计与实现46. 基于TCP/IP协议的单片机与INTERNET互连的设计与实现47. 基于嵌入式实时操作系统和TCP/IP协议的单片机测控系统48. AVR 8位嵌入式单片机在车载全世界定位系统显示终端中的应用49. 基于AVR单片机的250W HID灯电子镇流器的研究50. 基于单片机的TCP/IP技术研究及应用51. 基于P87C591单片机的CAN总线应用层协议的研究52. 基于单片机实现对二级倒立摆的操纵53. C8051FXXX系列单片机仿真器的研制54. 基于80C196MC单片机55. 基于单片机的胶印机操纵系统开发研究56. 基于凌阳单片机的二次压降全自动测量仪的研制57. 基于单片机的超声测距系统58. 基于MOTOROLA单片机的专用电池组智能充电仪59. 全站仪动态测量的研究和其与单片机在轨道式龙门吊实时检测中的应用60. 一种基于80C196KC单片机的新型电子负载的设计61. 基于单片机的对讲系统的研究开发62. 基于单片机的微波加热沥青路面再生修复机温度操纵器的开发与研究63. 基于单片机ATmega128的嵌入式工业操纵器设计64. 基于单片机的压电闭环微位移操纵系统的研究65. 基于单片机的高压静电除尘整流设备的自动监控系统设计66. 采纳W78E58单片机的酸碱浓度检测技术67. 基于单片机的粮库温度监控系统设计68. 基于单片机操纵的微型轴流式血泵外磁驱动系统研究69. 基于AVR单片机的电动自行车操纵系统研究70. 基于PIC单片机的配电网综合参数测控仪研究71. 全自动包装机的单片机操纵研究72. 基于单片机系统的Java虚拟机研究与设计73. 基于智能传感器和单片机的温度监测系统74. 基于DSP和单片机的数据搜集与处置系统的设计75. 基于单片机的在线测试技术的研究76. 分散式智能测控终端的研制——基于单片机计实现77. 基于单片机的定尺飞锯切割机操纵系统设计78. 基于196单片机的开关磁阻电机79. 基于EDA技术的兼容MCS-51单片机80. 基于单片机的嵌入式USB主机81. 单片机82. 基于MSP430单片机的微机83. 基于MSP430单片机机调速器的设计与研制84. 基于单片机85. 基于单片机和CAN86. 基于单片机87. 工程机88. 基于单片机89. 基于90. 基于91. 宏汇编器的设计与实现的轧机实验台散布式监测系统研究的DDD心脏起搏器的设计单片机的设计基于单片机操纵的能量回馈操纵系统的研究基于单片机的步进电机式汽车仪表的设计与实现97. 基于微功耗单片机的水声遥控系统的研究98. 面向单片机接口的新型液晶显示操纵器的研制99. 基于单片机操纵的水下脉动送丝焊接电源的研究100. 单片机在汽车制动性能检测系统中的应用101. 基于单片机操纵的MAG焊逆变电源的研究102. 基于单片机AT89C2051光电鼠标位移检测系统的研究103. 基于MSP430单片机的多功能TIG焊操纵器104. 基于单片机的柴油发动机冷却水温操纵系统的研究105. 单片机操纵的节水浇灌系统的研究106. 80C196KC单片机中子和γ综合电离辐射效应研究107. 汽油箱内汽油蒸汽利用的单片机操纵研究108. 基于单片机的鸡蛋破损检测系统研究109. 基于C8051单片机的圆轨倒立摆操纵系统设计110. 基于单片机的嵌入式Web效劳器在远程故障诊断中的应用111. 基于多机通信的AVR单片机高级用户板的设计与开发112. MC68HC908单片机在发动机台架实验中的应用研究113. 单片机操纵的可并联组合的高频开关型变流组件研究114. 小型家用燃气锅炉单片机操纵系统的研究115. 基于PIC单片机的海水有机磷实时数据搜集与操纵系统116. 基于AVR单片机的石油倾点自动测量系统设计117. 基于单片机的直接数字频率合成(DDS)技术的应用研究118. 单片机模糊操纵在电加热炉温度操纵系统中的应用119. PIC单片机芯片在电涡流传感器温度补偿中的应用120. 基于C8051F单片机直流电动机121. 基于单片机的嵌入式Web效劳器的研究122. MOTOROLA单片机MC68HC(8)EEPROM的工艺和制程方式及对良率的阻碍研究123. 基于模糊操纵的电阻钎焊单片机124. 基于MCS-51系列单片机125. 基于单片机STR)调剂器126. 单片机127. 基于增强型51系列协议栈的实现128. 基于单片机129. 基于32130. 基于单片机131. 基于机运动操纵系统研究与开发132. 基于133. 基于134. 基单片机的嵌入式系统开发的液压动力系统状态监测仪开发智能操纵方式的研究及其单片机实现单片机的轴快流CO〈,2〉激光器的手持操纵面板的研制基于双单片机冲床数控系统的研究基于CYGNAL单片机的在线间歇式浊度仪的研制140. 基于单片机的喷油泵实验台操纵器的研制141. 基于单片机的软起动器的研究和设计142. 基于单片机操纵的高速快走丝电火花线切割机床短循环走丝方式研究143. 基于单片机的机电产品操纵系统开发144. 基于PIC单片机的智能电话充电器145. 基于单片机的实时内核设计及其应用研究146. 基于单片机的远程抄表系统的设计与研究147. 基于单片机的烟气二氧化硫浓度检测仪的研制篇三:本科毕设题目(单片机相关)单片机毕业设计题目,电子毕业设计题目1. 单片机接入Internet技术在智能小区中的应用与研究2. 基于PIC单片机的高压智能同步开关操纵系统设计3. 基于单片机的刚性转子现场动平稳测试系统的研制4. 基于单片机的现场多道核能谱数据搜集系统研究5. 单片机模糊操纵晶闸管直流调压系统的研究6. 单片机嵌入式TCP/IP协议的研究与实现7. 基于单片机的几何参数主动量仪和通用测控仪的研制8. 基于C8051单片机的足球机械人小车操纵系统设计9. 利用FPGA模拟实现8051单片机及其外设的功能10. 用于TDMoIP实现的E〈,1〉功能卡单片机操纵研究11. 基于MSP430单片机的数字式压力表的设计与实现12. 基于CAN总线的单片机流量操纵系统的研究13. 单片机和嵌入式系统开发平台化的研究14. 基于单片机语音识别系统设计15. 基于80C196KC单片机的舞蹈机械人操纵系统16. 基于单片机的工业缝纫机操纵系统研制17. 基于单片机的智能稳压电源18. PIC单片机中国市场拓展战略19. 基于FPGA与单片机的高精度电子经纬仪光电信号处置系统研制20. 基于网络单片机的嵌入式远程监控系统研究21. 基于“单片机+CPLD/FPGA体系结构”的程控互换机系统集成化设计22. 智能温室环境操纵系统的设计与实验研究——单片机信号搜集及其通信操纵系统研究部份23. 弧焊逆变电源单片机操纵系统的稳固性研究24. 单片机系统仿真—对用户的软、硬件系统运行进程仿真25. 单片机系统仿真—生成用户硬件电路和汇编语言程序的故障诊断26. 单片机嵌入TCP/IP的研究与实现27. 雷达模拟器中的单片机应用28. 基于单片机的沥青摊铺机自动调平操纵器的研究29. 单片机操纵逆变埋弧焊机系统设计30. 基于sx52单片机的web效劳器的设计与实现31. 基于VHDL语言的单片机设计32. 单片机实现的仿人智能PID操纵器33. 基于单片机的船舶柴油机冷却水温度操纵系统34. 基于单片机的活性炭测氡仪的研制35. 单片机静脉麻醉靶控输注系统的研制与应用36. 基于PC+单片机的环境风洞风速操纵系统的研究37. 基于CPLD和单片机的爆轰波数据搜集系统设计38. 基于单片机和DSP的卷绕操纵器数据搜集和通信设计39. 基于MSP430单片机的柴油发电机监控器的设计40. 基于CPLD/FPGA和单片机的爆速仪设计41. 基于单片机操纵的晶闸管中频感应电源的研制42. 基于十六位单片机的电力设备故障在线监测装置的设计与算法研究43. 基于SPCE061A单片机的语音识别系统的研究44. 基于PIC单片机的生物性能实验装置的研究45. 基于Motorola MC68HC08系列单片机演示系统的设计与实现46. 基于TCP/IP协议的单片机与INTERNET互连的设计与实现47. 基于嵌入式实时操作系统和TCP/IP协议的单片机测控系统48. AVR 8位嵌入式单片机在车载全世界定位系统显示终端中的应用49. 基于AVR单片机的250W HID灯电子镇流器的研究50. 基于单片机的TCP/IP技术研究及应用51. 基于P87C591单片机的CAN总线应用层协议的研究52. 基于单片机实现对二级倒立摆的操纵53. C8051FXXX系列单片机仿真器的研制54. 基于80C196MC单片机操纵的变频调速及配料操纵系统的应用研究55. 基于单片机的胶印机操纵系统开发研究56. 基于凌阳单片机的二次压降全自动测量仪的研制57. 基于单片机的超声测距系统58. 基于MOTOROLA单片机的专用电池组智能充电仪59. 全站仪动态测量的研究和其与单片机在轨道式龙门吊实时检测中的应用60.一种基于80C196KC单片机的新型电子负载的设计61. 基于单片机的对讲系统的研究开发62. 基于单片机的微波加热沥青路面再生修复机温度操纵器的开发与研究63. 基于单片机ATmega128的嵌入式工业操纵器设计64. 基于单片机的压电闭环微位移操纵系统的研究65. 基于单片机的高压静电除尘整流设备的自动监控系统设计66. 采纳W78E58单片机的酸碱浓度检测技术67. 基于单片机的粮库温度监控系统设计68. 基于单片机操纵的微型轴流式血泵外磁驱动系统研究69. 基于AVR单片机的电动自行车操纵系统研究70. 基于PIC单片机的配电网综合参数测控仪研究71. 全自动包装机的单片机操纵研究72. 基于单片机系统的Java虚拟机研究与设计73. 基于智能传感器和单片机的温度监测系统74. 基于DSP和单片机的数据搜集与处置系统的设计75. 基于单片机的在线测试技术的研究76. 分散式智能测控终端的研制——基于单片机的大容量固态存储技术的设计实现77. 基于单片机的定尺飞锯切割机操纵系统设计78. 基于196单片机的开关磁阻电机调速系统设计79. 基于EDA技术的兼容MCS-51单片机IP核设计80. 基于单片机的嵌入式USB主机研究与实现81. 单片机操纵持续固体激光器高频开关电源的研制82. 基于MSP430单片机的微机自动准同期装置83. 基于MSP430单片机中小型水轮机微机调速器的设计与研制84. 基于单片机的便携式心电监测系统的研究85. 基于单片机和CAN总线的混凝土搅拌站操纵系统设计86. 基于单片机的全位置自动焊接操纵系统的研究87. 工程机械冷却能力单片机操纵系统88. 基于单片机的电除尘集散操纵系统的并行数据搜集89. 基于单片机的磁酶免测定仪的研制90. 基于单片机的籽棉动态称重系统91. ZLG51单片机宏汇编器的设计与实现92. 基于单片机的轧机实验台散布式监测系统研究93. 基于单片机的DDD心脏起搏器的设计94. 来电显示单片机的设计95. 基于单片机操纵的能量回馈操纵系统的研究96. 基于单片机的步进电机式汽车仪表的设计与实现97. 基于微功耗单片机的水声遥控系统的研究98. 面向单片机接口的新型液晶显示操纵器的研制99. 基于单片机操纵的水下脉动送丝焊接电源的研究100. 单片机在汽车制动性能检测系统中的应用101. 基于单片机操纵的MAG焊逆变电源的研究102. 基于单片机AT89C2051光电鼠标位移检测系统的研究103. 基于MSP430单片机的多功能TIG焊操纵器104. 基于单片机的柴油发动机冷却水温操纵系统的研究105. 单片机操纵的节水浇灌系统的研究106. 80C196KC单片机中子和γ综合电离辐射效应研究107. 汽油箱内汽油蒸汽利用的单片机操纵研究108. 基于单片机的鸡蛋破损检测系统研究109. 基于C8051单片机的圆轨倒立摆操纵系统设计110. 基于单片机的嵌入式Web效劳器在远程故障诊断中的应用111. 基于多机通信的AVR单片机高级用户板的设计与开发112. MC68HC908单片机在发动机台架实验中的应用研究113.。
基于P87C591构成CAN总线节点的设计
通用 的工业 应 用 。除 了具 有 P ip “ x+内核 ” hl s R i 的
增强特 性之外 , 件还 为这 些 应用 提 供 了许 多专用 器
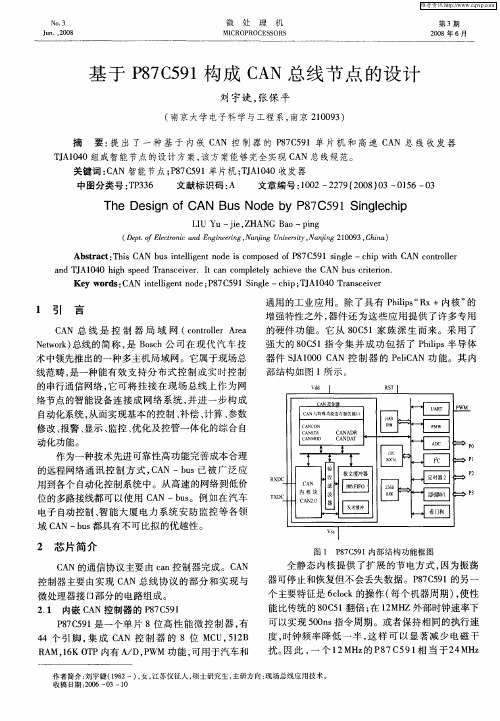
的硬件 功 能 。它 从 8 C 1家 族 派 生 而 来 。采 用 了 05 强大 的 8 C 1 令 集 并 成 功 包 括 了 P ip 半 导 体 05 指 h is l 器件 SA 0 0 C N控 制 器 的 P l A J 10 A e C N功 能 。其 内 i
2 芯 片 简 介
C N的通信协议主要由 cn A a 控制器完成。C N A 控制器 主要 由实 现 C N 总线 协议 的部 分 和 实现 与 A 微处理 器接 口部 分 的电路组成 。
2 1 内嵌 C N控制器 的 P 7 5 1 . A 8 C 9 P 7 5 1是一个单 片 8位 高 性 能 微 控 制器 , 8 C9 有 4 4个 引 脚 , 成 C N 控 制 器 的 8位 MC 5 2 集 A U, 1B R M,6 T A 1 K O P内有 A D,WM 功 能 , V P 可用 于汽 车和
1 引 言
C N 总 线 是 控 制 器 局 域 网 ( o t l rA e A cnr l r oe a N tok 总线 的简 称 , B sh公 司在 现 代 汽 车 技 e r) w 是 oc 术 中领先推 出的一种 多主机局 域 网。它属 于现场 总 线范 畴 , 是一种 能有 效 支持 分 布式 控 制 或实 时 控制
部 结构如 图 1 示 。 所
的串行通信 网络 , 可将 挂 接 在 现 场 总线 上作 为 网 它
络节点 的智 能设 备 连接 成 网络 系统 , 进 一步 构 成 并
自动化系统 , 从而实现 基本 的控制 、 补偿 、 计算 、 参数 修改 、 报警 、 显示 、 监控 、 优化 及控 管一体 化的综 合 自
基于无线控制CAN总线嵌入式传感器研究与应用

由 S M3 制 的 C N总线 传输 ,将 上述信 息与其他 设备 进行 交互 ,并通过 S M 2模 拟 无 线收发 T 2控 A T3
芯片 2 6 ,2 7 2 2 2 2的功 能 实现 无线 收发 与控 制端 的 控 制信 息 ,从 而 简化 了系统 的模 块 ,实现 了控
制的简易性 。最后通过对原有 C N通信协议 中的节点网络通信方式进行优化 ,并提 出了改进 算 A 法 ,实现 了工控 现 场设备 通信 的 网络化 ,节点化 。
摘
要 :致 力 于研 究并设 计 出一套 对传 感 器进行 实时监 控 以 C N 总线 为 系统通信 方 式 的并 具 有 A
无线 收发 功能 的嵌入 式传 感 器监 测 系统 。设 计 工作 是 基 于 MD ot 3平 台 的 S M3 K Cr x e T 2控 制 器 为 核 心 的 ,通 过 对 S M3 T 2对 光 纤压 力传 感 器 的 实时监 控 ,从 而 实 时获得 现 场 的压 力 变化 ,通过 经
0 引 言
如今 计算 机 、 通信控 制 、 网络 技术 的不 断迅 猛发 展, 信息 交换 沟通 的范 围迅 速扩大 , 盖 了现场设 备 覆 到控 制管 理各 个层 次 , 业 控 制 监 控 已并 不 局 限于 工
现场 监控 , 场调 度 。工业 生 产 过 程控 制 也 随之 要 现
Absr c : Th sa tce d d c t st e e r h a d d sg e lt y tm O a o mo i rs n o s ta t i ril e i ae o r s a c n e in a r a —i s se S st n t e s r .Th s me o i s se ta so ms d t nd o d r b h a i g o y tm r n fr a a a r e y t e me n n f CAN us c mmu i ai n a d i lo ha r ls b o n c to n t as s wiee s r n c ie a b lt is l. ta s e v rc pa ii tef W i i d sg i c u d mo i r t e t t ft e e o nd o to e y t t s e i n t o l n t h saus o s ns r a c n l t hh o h r h
基于P87C591的CAN总线生产油井温度采集系统设计
应 用 研 究
;. 技应 术用 l~ 一
啦
基于 P 7 5 的 C N 8C 9 1 A 总线生产油井温度采集系统设计
张韬 胡 泽 肖宇恒 张 莹 孙 彪
( 南石 油 大学 电气信 息 学 院 四川成 都 600) 西 150
摘要 : 介绍 一种 以P ip公 司 ̄P 7 9 单 片机作 为 温度采 集 系统的控 制核 心及 c N总线控 制 器 , 8C 54 C N总线收发 器的c N总 his l 8C51 A v 2 2 0 ̄ X A A 线温度采 集系统。 关键词 : 温度 采 集 P 7 9 C N总线 8 C5 1 A 中图 分 类号 :P 7 . T 2 42 文献标识 码 : A 文章编 号 :0 79 1(0 20 —0 70 l0 -4 62 l)20 5 -2
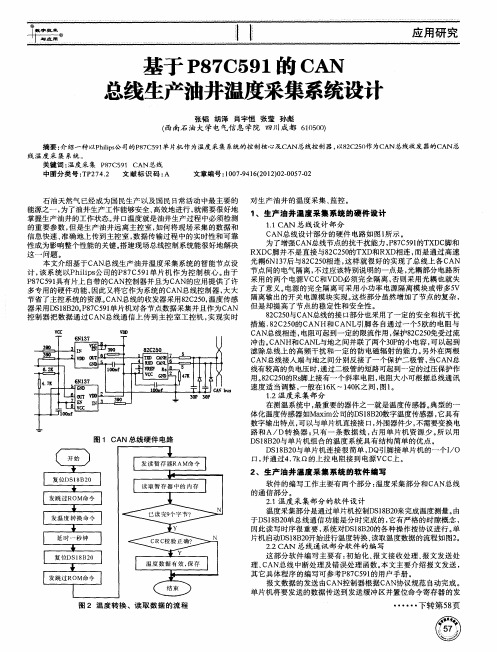
光耦6 3 后与8 C 5相 连 , N17 2 20 这样就 很好的实现 了总线上各 C AN 节点间的 电气隔离 , 不过 应该特 别说 明的一点是 , 光耦 部分电路所 采用 的两个 电源VC 和VD 必须完全 隔离 , C D 否则采用光耦 也就失 去 了意义 。 电源的完全 隔离 可采用小功率 电源 隔离模块 或带 多5 V
石油天然气 已经成为国 民生产 以及 国民 日常活动 中最 主要 的 能源之一 , 了油井生产工作能够安全、 为 高效地进行, 就需要很好地 掌握生产油井的工作状态 。 口温度就是油井生产过程 中必须检测 井 的重要参数 , 但是生产油井远离 主控 室 , 如何将现场采集 的数据 和 信息快速 、 准确地上传到主控 室, 数据传输过程 中的实时性和可靠 性成为影响整个性 能的关键 。 搭建现场总线控制 系统能很好地 解决 这一 问题 。 本文介绍基于C 总线生产油井温度采集系统 的智 能节点设 AN 计 , 系 统 以P i p 公 司 的 P 7 9 单 片 机 作 为 控 制 核 心 。 该 hl s i 8 C5 l 由于 P7 51 8 C 9 具有片上 自带的C AN控制器并且为C AN的应用提供 了许 多 专 用 的 硬 件 功 能 , 此 又将 它 作 为 系统 的 C N总 线 控 制 器 , 大 因 A 大 节省 了主控系统的资源。 AN总线的收发器采用8 C 5 , C 2 2 0 温度传感 器 采 用 D 1B 0 P 7 5 1 片 机 对 各 节 点 数 据 采 集 并 且作 为 C N S 8 2 。 8 C 9单 A 控制器把 数据通过 C AN总 线 通 信 上 传 到 主控 室 工 控 机 , 现 实 时 实
《2024年基于CAN总线的嵌入式人机交互终端的设计与开发》范文
《基于CAN总线的嵌入式人机交互终端的设计与开发》篇一一、引言随着科技的不断发展,嵌入式系统在工业控制、智能设备、汽车电子等领域得到了广泛应用。
作为嵌入式系统的重要组成部分,人机交互终端在提高系统的操作便捷性、用户体验以及信息交互效率等方面具有重要作用。
本文将介绍一种基于CAN总线的嵌入式人机交互终端的设计与开发方法。
二、系统需求分析在设计基于CAN总线的嵌入式人机交互终端时,首先要明确系统的需求。
主要包括以下几点:1. 实时性:终端需要具备较高的实时性,以便快速响应各种操作指令。
2. 可靠性:终端需要具有较高的可靠性,以保证在复杂环境下稳定运行。
3. 交互性:终端需要提供友好的人机交互界面,方便用户操作。
4. 可扩展性:终端应具备较好的可扩展性,以便于后续功能的增加和升级。
三、硬件设计硬件设计是嵌入式人机交互终端的基础。
主要包括以下部分:1. 主控制器:选用高性能的微控制器,负责整个系统的控制和数据处理。
2. CAN总线接口:用于与其他设备进行通信,实现数据的传输和共享。
3. 人机交互界面:包括显示屏、按键、触摸屏等,提供友好的用户操作界面。
4. 电源模块:为整个系统提供稳定的电源供应。
四、软件设计软件设计是实现嵌入式人机交互终端功能的关键。
主要包括以下部分:1. 操作系统:选用适合微控制器的实时操作系统,保证系统的实时性和稳定性。
2. 通信协议:设计符合CAN总线通信协议的软件模块,实现与其他设备的通信。
3. 人机交互界面软件:开发友好的用户界面软件,包括显示、输入、输出等功能。
4. 数据处理与算法:实现数据的处理和算法运算,为系统提供数据支持。
五、开发流程基于CAN总线的嵌入式人机交互终端的开发流程主要包括以下几个步骤:1. 需求分析:明确系统的需求和功能,制定开发计划。
2. 硬件设计:根据需求设计硬件电路,包括主控制器、CAN 总线接口、人机交互界面等。
3. 软件设计:编写操作系统、通信协议、人机交互界面软件等程序。
基于CAN总线的客车轻便换档操控系统
基于CAN总线的客车轻便换档操控系统
方加宝;赵怀皓;刘欣;刘传刚
【期刊名称】《自动化技术与应用》
【年(卷),期】2007(26)2
【摘要】文章介绍了符合CAN2.0B协议的CAN总线在客车轻便换档操控系统中的应用.重点阐述了以Philips公司生产的一款内嵌CAN控制器的微处理器
P87C591为核心的CAN智能节点在此系统中的软硬件实现.
【总页数】3页(P132-134)
【作者】方加宝;赵怀皓;刘欣;刘传刚
【作者单位】大连理工大学,机械工程学院,辽宁,大连,116024;大连理工大学,机械工程学院,辽宁,大连,116024;大连理工大学,机械工程学院,辽宁,大连,116024;大连理工大学,机械工程学院,辽宁,大连,116024
【正文语种】中文
【中图分类】TP368.1;TP336
【相关文献】
1.基于SC81平台的手动变速箱轻便换档的优化开发 [J], 杨克军
2.基于CAN总线的客车轻便换档系统设计与实现 [J], 刘欣;刘传刚;方加宝;赵怀皓
3.客车电控半自动换档操控系统 [J], 刘欣;侯素礼;方加宝;孟庆
4.基于CAN总线的客车电控自动换档系统 [J], 方加宝;马诚;刘欣;孙永强
5.基于VB和CAN总线的新能源客车监控平台设计开发 [J], 王柏卫
因版权原因,仅展示原文概要,查看原文内容请购买。
基于单片机P87C591的数据采集板的设计
用 它 来求 解 微 分 方 程 也 就 是 求 解 系统 动 态方 程 . 它还 可 以对 离散 系统 进 行 分 析 和 设 计 等 。 总之 . MA T L A B拥 有 丰 富 的 自动 控制软件 包. 对 自动 控 制 理 论 教 学提 供 了全 新 的 方 法 . 如 果 能 领 会 和理 解课 程 的 分析 方 法和 处 理 结果 . 就 能 充分 的 调 动 学 生 学 习该课 程 的 积极 性 , 增 加 学 生 学 习兴趣 , 提 高课 堂 学 习效 率 。
【 文章 ̄ - 1 1 0 0 6 — 4 2 2 2 ( 2 0 1 5 ) 2 0 — 0 2 8 3 — 0 2
( 3 ) 带 6路 模 拟 输 入 的 1 0位 A D C ;
( 4 ) 2个 8位 分 辨 率 的脉 宽调 制 输 出 ( P WM) ;
弓 l 百
在 很 多工 业控 制 的现 场 , 对 环境 数 据 的 采 集 是 进 行控 制 的
( 7 ) 全 双 工增 强型 U A R T, 带有 可 编 程 波 特 率发 生 器
( 8 ) 双 DP TR:
器 来 完 成模 拟 量 到数 字 量 的 转 换 。 实现 数 据 采 集 的 方 式 通 常
分为两种 : ( 利 用通 用型 的 处理 器 芯 片 , 外接 专 用 的 A/ D转 换
基 本 依 据 。 环 境 数 据如 温度 、 压力、 湿度等 , 都 必 须 利 用 传 感 器 转换 成 为 连 续 变化 的模 拟 电信 号 才能 进入 计 算 机 进行 处理 。而 计 算机 系统 是数 字 系统 , 处理 不 了模 拟 量 , 因此 需要 A / D 转 换
基于P87C591的CAN总线通信系统设计

3 智 能 节 点 硬件 设 计
如 图 2所示 .硬件接 口主要 由主控 制器 P 7 5 1 C 8 C 9 .AN收 发器 P A8 C 5 C 2 2 0和 R 2 2电平转换电路组成 由于 P 7 5 1 S3 8C 9 本身包含 内 置的 C N控制器 . A 因此不需 要外加独 立的 C N控制 器 . A 所需要 的外
^V群 A V竹f v 埘 T Xoc XDC E 酐
xT^ T c LI )D XT 2 R×D ^L
图2 CA N总线智 能节点硬件电路图
P A 2 20 C 8 C 5 共有 3 种不同的工作模式 : 高速 、 准备 、 斜率控制。模 式控制 通过 R 控制引脚提供。把管脚 R 通过斜率控制电阻 R 接 地 s s 1 2 通信 系统总体拓扑结构 选择高速模式, 它支持最大的总线速度和长度。在速率要求不高 的情 R 可以选择在范 围 1 K 10  ̄ 之间。 5 ~4K 根 据 C N总线中节点的互连形 式 . A 基于 C N总线 的通信 系统 的 形下 , s A 单片机通过 T D和 R X XD引脚 . 电平转换 芯片 MA 2 2将 1r 用 X3 T L 网络拓扑结构如 图 1 所示。 电平 转换到 R 2 2电平 S3
部元件仅仅是一个晶体振荡器和两个电容以产生时钟脉冲 . 一个简单 的上 电复位 电路以及通过 8 C 5 将 P 7 5 1 2 20 8 C 9 通过连接 到 C N总线 A
上。
P 7 5 1 过 串行数 据输 出线 T C和 串行 数据输 入线 R C 8C 9 通 XD XD 连接到收发器 8 C 5 8 C 5 通过 2 总线终端 C N 220 2 20 个 A H和 C N 连 A L 接到总线电缆, 终端需并联 2 10 l 总线 个 2l 电阻以抑制信号反射 . 保证 通信可靠性 。 系统中加入 P A 2 20 由于内置 C N控制器 的信号 C 8C 5, 是 A 输 出口驱动 能力较低 .C 8 C 5 P A 2 20可以对总线提供差动发 送能力 . 对 P 7 5 1提供差动接收能力。 8C9
基于P87C591的DeviceNet智能通信节点设计
Ch n Z i ig Z a g Ja f n Ja Ch o Li l e apn h n in e g i a i Qi n
D vcNe e ie t遵 从 OS 模 型 , 于 它 采 用 了 CAN 技 I 由
1 引
言
术 , 以 Deie t 用 了 CAN 协议 标 准所 规 定 的 总 线 所 vcNe 沿 网络 的物 理 层 和 数 据 链 路 层 部 分 , 充 定 义 了 不 同 的 报 补
Ab t a t A 7 s r c P8 C59 s d De ie t n e i t r a e wa e i e l ba e vc Ne od n e f c s d sgn d.P8 C5 s c 7 9l i hos n a e sCPU he s s oft y - t r ,PCA8 C2 0 a h r s e v r f vc Ne e n 2 5 s t e tan c i e orDe ie tphy i a n e f c ,a l n a s u e o o a sc li t ra e nd C5l a gu gei s d f rpr gr m— ml g t v c Ne pp ia i n l y r c m mun c ton pr t c 1 A e t e pe i e n heDe ie ta lc to a e o ia i o o o . t s x rm nt was c r id o t be we n a re u t e I XXAT PC— 32 v c Ne omm u c ton i e f c a d a d t sDe i e td v l p e tn e I I 0 De ie tc nia i nt r a e c r n hi v c Ne e e o m n od .The e pe — x r i n a e u ts ws t a h v c Ne d nt r a e f l e s t man fDe i e ts e iia i . me t 1r s l ho h tt e De ie tno e i e f c uly me t he de d o v c Ne p cfc ton Ke r s De le tfe db CA N C51 y wo d v c Ne il us
基于P87C591的CAN总线超声测距系统设计

对 于 多 路 超 声 波 传 感 器 的 扩 展 , 般 是 在 机 器 人 系 统 控 制 一
核 心 之 上 进 行 。这 样 做 的 缺 点 在 于 , 声 波 传 感 器 的 扩 展 超 占用 了大 量 的系 统 硬 件 资 源 , 外 大 量 的测 量 信 息 的 处 理 另 也 浪 费 了 系统 软 件 资 源 。针 对 这 一 问 题 , 者 采 用 C N 笔 A 总线 扩展 多 路 超 声 波 传 感 器 的作 法 。这 种 作 法 有 几 个 优
C 控制器 l C 控制器I lA 控制器 l lA 控制器 l N A A IN C N C N
(8C 9) l (8C 9) I IP7 5 1 I lP7 51 I P7 51 P 7 5 1 (8C 9) (8C 9) I
l I l l I l l I
源 。CAN 总 线 的收 发 器 采 用 TJ 0 0 A1 4 。系 统 总 体 结 构 框
引 言
移动 机 器 人 的安 全 避 障 问题 一 直 是 该 项 研 究 的 基 本 问题 , 目前 解 决 此 问题 的基 本 方 法 是 采 用 多 路 超 声 波 传 感
器通过适 当的安装 角 度达 到获 取 多路 测量 信息 的 目的。
基 于 P 7 5 8C 9 1的 C AN息 线 超声 测距 系统 设 计
一 齐 齐 哈尔 大 学 董 晶 刘 树 东 戴 学 丰 绍 林
关键词
超 声 波测 距 C AN 总 线
P 7 5 1 TJ O O I 8 CX2 1 6 8 C 9 Al 4 M3 6 0 0 A
机 器 人 系 统 控 制 核 心 ( M) AR
据通 信 的 可 靠 性 ; 次 , 路 超 声 波 传 感 器 的 设 计 可 由 其 多 C AN 总线 智 能 节 点 实 现 , 大 节 省 了 系 统 硬 件 资 源 和 软 大
基于P87C591内嵌CAN控制器的Protos故障显示器设计
和成本 的降低 , 因此文 中选 用 Pip 公 司生 产 的 内 hl s i
嵌 SA 0 0型 C N控制 器 的 P 7 5 1单 片机 作 为 J 10 A 8C9
处 理 器 。通过 P7 5 1单 片机 的 C N接 口接 收 总 8C9 A
线 网络上 的 Po s 接 机 组 故 障 信 息 , 据故 障信 rt 卷 o 根
wt A o t l rad teoeai f au m f oecn i l i C N c n o e ,n h p rt n o v cu ursetds a V D)uigtemi oo t l r h rl o l p y( F s h c cnr l n r oe
息代码 , 控制 V D 显 示屏 正 确 显 示 汉 字故 障信 息 ; F
同时 还介绍 了 V D显 示 屏 的使 用 和汉 字 显 示 程 序 F 的设 计实 现方法 。
收稿 日期 :0 0 0 — 5 2 1 - 3 0
作者简 介: 张洪学 (9 7 , 17 ) 毕业于占林大学电子信息工 程专业 , 工学学士 , 从事卷烟机 电控系统及复合滤棒成 型机电控 系统 的开发
工作。
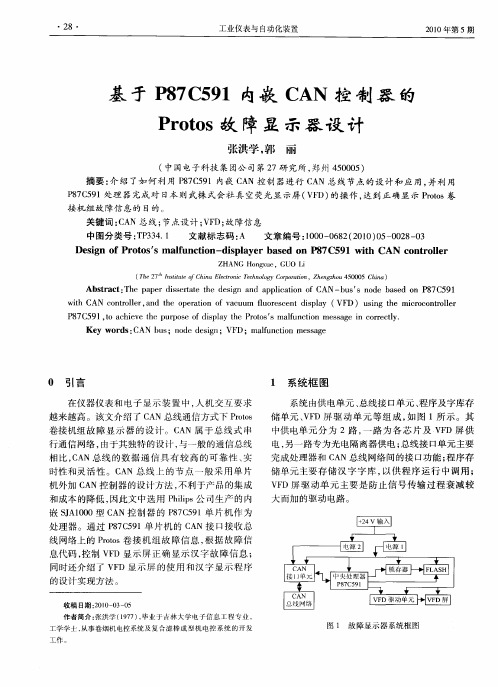
图 1 故 障显示器系统框图
2 1 第 5期 0 0年
T业 仪 表 与 自动 化 装 置
・2 ・ 9
总线数 据传 输 。 C N收 发 芯 片采 用 P ip 司 的 A hl s公 i
2 系统 硬 件 设 计
系 统硬件 设计 主要 包 括 总线 接 口设 计 、 理 器 处 与 V D屏 接 口设 计 、 理 器 外 扩 Fah设 计 。 由于 F 处 l s
・
2 8・
带 CAN 控制器的单片8 位微控制器-P8xC591 单片机学习

带CAN控制器的单片8位微控制器-P8xC591 1. 特性 1.1 P8xC591的80C51相关特性 Ÿ 全静态80C51中央处理单元,可提供OTP,ROM和无ROM型Ÿ 16K字节内部程序存储器,可外部扩展到64K字节Ÿ 512字节片内数据RAM,可外部扩展到64K字节Ÿ 3个16位定时/计数器T0,T1(标准80C51)和附加的T2(捕获&比较)Ÿ 带6路模拟输入的10位ADC,可选择快速8位ADCŸ 2个8位分辨率的脉宽调制输出(PWM)Ÿ 作为标准80C51引脚时有32个I/O口Ÿ 带字节方式主和从功能的I2C总线串行I/O口Ÿ 片内看门狗定时器T3Ÿ 扩展的温度范围:-40~+85℃Ÿ 加速指令周期500ns@12MHzŸ 操作电压范围:5V5%Ÿ 保密位:-ROM(2位)-OTP(3位)Ÿ 32字节加密阵列Ÿ 4个中断优先级,15个中断源Ÿ 全双工增强型UART,带有可编程波特率发生器Ÿ 电源控制模式―时钟可停止和恢复―空闲模式―掉电模式Ÿ 空闲模式中ADC有效Ÿ 双DPTRŸ 可禁止ALE实现低EMIŸ 可编程I/O口(准双向、推挽、高阻和开漏)Ÿ 掉电模式可通过外部中断唤醒Ÿ 软件复位(AUXR1.5)Ÿ 复位脚低有效Ÿ 上电检测复位Ÿ Once模式1.2 P8xC591与CAN相关的特性 Ÿ CAN2.0B控制器,支持11位标准和29位扩展标识符Ÿ 8MHz时钟可实现1Mbit/sCAN总线速率Ÿ 64字节接收FIFOŸ 13字节发送缓冲区Ÿ 增强型PeliCAN内核(取自SJA1000独立CAN2.0B控制器)1.2.1 PeliCAN特性 Ÿ 4个独立可配置的筛选器(验收滤波器)Ÿ 每个筛选器有32位区分符-32位Match-32位MaskŸ 每筛选器的32位Mask允许唯一的组寻址Ÿ 更高层的协议支持标准CAN格式:-最多4个11位ID筛选器可筛选两个数据字节-即数据流可通过CAN ID和数据字节内容进行筛选Ÿ 最多8个11位ID筛选器其中半数可筛选第一个数据字节Ÿ 所有筛选器都可“change on the fly”Ÿ 只听模式,自检测模式Ÿ 错误代码捕获,仲裁丢失捕获,可读的错误计数器2 概述 PP8xC591是一个单片8位高性能微控制器,具有片内CAN控制器,从80C51微控制器家族派生而来。
中断在P87C591通信控制中的研究

表示未成功 发送 , 8C 9 将对此次发送进行 发送请 P7 51 求位置 l 并采用重新 发送等其它特殊处 理。
丢失 中断 、 错误消极 中断 、 唤醒 中断、 数据溢 出中断、 错误报警 中断 、发送 中断、接受 中断 ,8个不 同的中 断,这些 中断可用于 在一 定 C N A 控制器状态 ,通过 C U立 即进行初始化 。 P 下面分别从发送和接收两个方 面对 P x 9 通信过 程中发送 中断 、 8C5 1 接受 中断做具体
P l A 寄存 器和 R eC N i AM 区进行访 问。如 图 l 示 。 所
表 1 AN 控 制 器 比较 C
3CN A 控制器 比较
P7 5 1 8 C 9 内部 C N控制器和 S A10 A A J 0 0C N控制
器 比较 。见表 l 。
CN A控制器名称
验 收滤波 器组
SA00 J10
1个支 持双 或单 滤波 器的验 收滤波 器组
Px 51 8C9 内部 CN A
4 个支 持双 或单滤波 器的验 收滤波器组 所有滤波器都可在运行 中改变
t l / AL(2 R . … … . 1 s =I XT c f 3 B P5 + . 1 +
C AN 位 定 时 计 算 t l / AL(2 R . … … 一 1 s =2f c XT 3 B P5 + +)
写
- 一
中断使 能
状态
读
图 1 8 C 9 通 信 结 构 7 51 P
P7 5 1 8C 9 还增加 了“ 在运行 中改变( hn e nh C ag e ot Fy l)” 的功 能 ,此功 能克服 了改变 滤波器 的定义 必
传感与控制-P87C591内嵌CAN控制器的应用设计
P87C591内嵌CAN控制器的应用设计摘要:独立的CAN控制器芯片需要外接一个微处理器,接受外部CPU的控制才能运行。
如果微处理器内部带有CAN控制器,无疑会大大简化应用系统的硬件设计,系统的可靠性也有很大提高,同时还可以大幅度降低生成成本。
Philips的新产品P87C591内部集成了CAN控制器。
本文主要介绍如何利用P87C591进行CAN 节点的设计和应用。
关键词:P87C591 CAN 节点 PeliCAN 应用设计引言CAN属于总线式串行通信网络。
由于其独特的设计,与一般的通信总线相比,CAN总线的数据通信具有突出的可靠性、实时性和灵活性。
CAN总线早已成为国际标准,其应用范围也从最初的汽车电控逐步扩展到工业控制的各个领域,成为最有前途的现场总线之一。
CAN总线上的节点一般采用单片机外加CAN控制器的设计方法,不利于产品的集成和成本的降低。
现在Philips公司推出的P87C591集成了CAN控制器SJA1000。
本文将详细介绍基于P87C591的CAN智能节点软硬件设计及其应用。
1 P87C591简介P87C591有44个引脚,是一个单片8位高性能微控制器,具有片内CAN控制器。
它从MCS-51微控制器家族派生而来,采用了强大的80C51指令集并包括了Philips半导体SJA1000 CAN控制器的PeliCAN功能。
全静态内核提供了扩展的节点方式。
振荡器可停止和恢复而不丢失数据。
改进的1:1内部时钟分频器,在12MHz外部时钟速率是实现500ns指令周期。
中央处理器CPU使用的操作数来自3个存储空间:16KB内部程序存储器,可扩展到64KB;512B内部数据存储器;最大64KB外部数据存储器。
图1为P87C591的功能框图。
有关芯片的引脚定义和更多的扩展功能可参阅P87C591芯片资料,在此不多讲。
芯片引脚P3.0和P3.1作为复用脚使用,除了具有普通C1单片机功能外,还可分别复用为CAN的RxD和TxD输入输出脚。
基于CAN总线技术的汽车车灯、电动车窗、雨刮的控制系统
基于CAN总线技术的汽车车灯、电动车窗、雨刮的控制系统简介随着现代汽车的迅猛发展和电子技术的日新月异,汽车电子设备不断增多,从发动机控制到传动系统控制,从行驶、制动、转向系统控制到安全保证系统及仪表报警系统,从电源管理到为提高舒适性而作的各种努力,使汽车综合控制系统越来越复杂。
目前.以微控制器为代表的汽车电子在整车电子系统中应用广泛,汽车控制正由机电控制系统转向以分布式网络为基础的智能化系统。
CAN总线是一种支持分布式和实时控制的串行通信网络,以其高性能和高可靠性在自动控制领域广泛应用。
本设计主要针对基于CAN总线的汽车电子系统的设计,包括汽车车灯和汽车车窗和汽车雨刮等控制系统的总体设计思想、方法和硬件设计,介绍如何实现用CAN总线完成汽车控制系统的控制。
目录CAN总线----------------------------------------------------------------------------------------------------------------- 3 1.1 CAN简介 --------------------------------------------------------------------------------------------------------- 3 1.2 CAN总线协议的报文帧结构形式 ------------------------------------------------------------------------- 3 CAN 总线在奥迪A6汽车车灯上的应用----------------------------------------------------------------------- 4 2.1 灯光控制系统的网络硬件设计。
------------------------------------------------------------------------- 5 2.2MCU的选择----------------------------------------------------------------------------------------------------- 6 2.3 CAN通讯控制器------------------------------------------------------------------------------------------------ 6 2.4 CAN总线收发器------------------------------------------------------------------------------------------------ 6 2.5 系统的软件设计 ------------------------------------------------------------------------------------------------- 7 2.6 CAN控制初始化程序 ----------------------------------------------------------------------------------------- 7 2.7 中央处理器程序设计------------------------------------------------------------------------------------------- 8 2.8车灯控制程序 --------------------------------------------------------------------------------------------------- 11 CAN总线在奥迪A6汽车电动车窗上的应用 --------------------------------------------------------------- 15 3.1系统的总体设计 ------------------------------------------------------------------------------------------------ 15 3.2硬件接口电路设计 --------------------------------------------------------------------------------------------- 15 3.3系统软件设计 --------------------------------------------------------------------------------------------------- 17 3.3.1 CAN控制初始化-----------------------------------------------------------------------------------------------17 3.3.2节点发送/接收报文-------------------------------------------------------------------------------------- --17 3.3.3 主控程序--------------------------------------------------------------------------------------------------------18 3.4电动车窗系统主要技术参数和功能 ---------------------------------------------------------------------- 19 CAN总线在奥迪A6汽车雨刮上的应用---------------------------------------------------------------------- 19 4.1系统的总体设计 ------------------------------------------------------------------------------------------------ 19 4.2系统硬件电路设计 --------------------------------------------------------------------------------------------- 20 4.2.1雨量检测模块 ------------------------------------------------------------------------------------------------- 20 4.2.2开关控制模块 ------------------------------------------------------------------------------------------------- 21 4.2.3 ECU和CAN通信模块 ------------------------------------------------------------------------------------ 21 4.2.4输出驱动模块 ------------------------------------------------------------------------------------------------- 22 4.2.5雨刮电动机 ---------------------------------------------------------------------------------------------------- 22 4.3系统软件设计 --------------------------------------------------------------------------------------------------- 24结语-----------------------------------------------------------------------------------------------------------------------32CAN总线1.1 CAN简介CAN(ControllerAreaNewtork)即控制器局域网,是一种先进的串行通信协议,属于现场总线范围。
基于P87C591构成CAN总线节点的设计

基于P87C591构成CAN总线节点的设计
刘宇婕;张保平
【期刊名称】《微处理机》
【年(卷),期】2008(029)003
【摘要】提出了一种基于内嵌CAN控制器的P87C591单片机和高速CAN总线收发器TJA1040组成智能节点的设计方案,该方案能够完全实现CAN总线规范.【总页数】3页(P156-158)
【作者】刘宇婕;张保平
【作者单位】南京大学电子科学与工程系,南京,210093;南京大学电子科学与工程系,南京,210093
【正文语种】中文
【中图分类】TP336
【相关文献】
1.基于P87C591的CAN总线通信系统设计 [J], 陈志松
2.基于P87C591的CAN总线系统智能节点设计 [J], 罗红枫;徐兴
3.基于P87C591的CAN总线生产油井温度采集系统设计 [J], 张韬;胡泽;肖宇恒;张莹;孙彪
4.基于P87C591的CAN总线生产油井温度采集系统设计 [J], 张韬;胡泽;肖宇恒;张莹;孙彪
5.基于P87C591的CAN总线系统智能节点的设计 [J], 蔺京敏;张振东;梁捷;彭雪刚
因版权原因,仅展示原文概要,查看原文内容请购买。
微控制器MB90F591在嵌入式图像系统中的应用

微控制器MB90F591在嵌入式图像系统中的应用
李霞;徐玲
【期刊名称】《计算机仿真》
【年(卷),期】2005(000)0z1
【摘要】文中描述了富士通F2MC-16LX系列微控制器MB90F591的主要硬件特性,简要介绍了MB90F591软件开发的特点.采用MB90F591与TI的通信接口器件MAX232构成的组件与微机进行串行通信,并介绍了该方法在嵌入式图像系统中的应用实例.同时,还可采用该单片机与PHILIPS的CAN控制器接口器件
PCA82C250构成现场总线最小系统节点,并介绍了具体实现方案.通过软件仿真证明,该单片机在多点串行通信,要求高可靠性,高通信速率,易于扩展的应用场合,可以很好地完成此性能要求.微控制器MB90F591在汽车控制设备、工业控制等领域得到广泛应用,具有很高的推广价值.
【总页数】3页(P367-369)
【作者】李霞;徐玲
【作者单位】江南大学通信与控制工学院,江苏,无锡,214122;江南大学通信与控制工学院,江苏,无锡,214122
【正文语种】中文
【中图分类】TP368
【相关文献】
1.嵌入式微控制器在智能节水洁具中的应用 [J], 徐和飞;蒋存波
2.ARM微控制器在嵌入式综合数字继电器中的应用 [J], 曹斌;张杭;张爱民;杨卫朋;陈珍萍
3.嵌入式微控制器在电梯速度控制系统中的应用研究 [J], 梁恩兰
4.基于创客教育的高职院校"嵌入式微控制器的认识与应用"课程建设研究 [J], 张晓芳;周静红
5.嵌入式微控制器的应用分析 [J], 陈倚重
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
P87C591内嵌CAN控制器的应用设计摘要:独立的CAN控制器芯片需要外接一个微处理器,接受外部CPU的控制才能运行。
如果微处理器内部带有CAN控制器,无疑会大大简化应用系统的硬件设计,系统的可靠性也有很大提高,同时还可以大幅度降低生成成本。
Philips的新产品P87C591内部集成了CAN控制器。
本文主要介绍如何利用P87C591进行CAN 节点的设计和应用。
关键词:P87C591 CAN 节点 PeliCAN 应用设计引言CAN属于总线式串行通信网络。
由于其独特的设计,与一般的通信总线相比,CAN总线的数据通信具有突出的可靠性、实时性和灵活性。
CAN总线早已成为国际标准,其应用范围也从最初的汽车电控逐步扩展到工业控制的各个领域,成为最有前途的现场总线之一。
CAN总线上的节点一般采用单片机外加CAN控制器的设计方法,不利于产品的集成和成本的降低。
现在Philips公司推出的P87C591集成了CAN控制器SJA1000。
本文将详细介绍基于P87C591的CAN智能节点软硬件设计及其应用。
1 P87C591简介P87C591有44个引脚,是一个单片8位高性能微控制器,具有片内CAN控制器。
它从MCS-51微控制器家族派生而来,采用了强大的80C51指令集并包括了Philips半导体SJA1000 CAN控制器的PeliCAN功能。
全静态内核提供了扩展的节点方式。
振荡器可停止和恢复而不丢失数据。
改进的1:1内部时钟分频器,在12MHz外部时钟速率是实现500ns指令周期。
中央处理器CPU使用的操作数来自3个存储空间:16KB内部程序存储器,可扩展到64KB;512B内部数据存储器;最大64KB外部数据存储器。
图1为P87C591的功能框图。
有关芯片的引脚定义和更多的扩展功能可参阅P87C591芯片资料,在此不多讲。
芯片引脚P3.0和P3.1作为复用脚使用,除了具有普通C1单片机功能外,还可分别复用为CAN的RxD和TxD输入输出脚。
P87C591包括Philips半导体公司的独立CAN控制器SJA1000具有的所有功能,并在此基础上扩展了以下功能:①增强的CAN接收中断,有接收缓冲区级的接收中断;用于接收中断的高优先级验收滤波器。
②扩展的验收滤波器,8个滤波器用于标准帧格式,4个滤波器用于扩展帧格式;验收滤波器的“运行中改变”特性。
2 PeliCAN控制器的CPU之间的通信CPU与CAN之间的接口功能框图如图2所示。
80C51CPU接口将PeliCAN与P87C591微控制器内部总线相连,通过5个特殊功能寄存器CANADR、CANDAT、CANMOD、CANSTA和CANCON对PeliCAN寄存器和RAM区进行快捷的访问。
由于支持大范围的地址,基于寻址的间接指针允许使用自动增加模式对寄存器进行快速访问,这样就将所需的SFR的数目减少到5个。
需要注意的是,CANCON和CANSTA 根据访问方向的不同而具有不同的寄存器结构。
PeliCAN寄存器可以通过两种不同的访问访问。
那些控制CAN主要功能最重要的几个寄存器,支持软件轮询,可以像单独的SFRs一样直接访问;而PeliCAN模块中的其它部分通过一个间接的指针机制进行访问。
为了达到高数据吞吐量,在使用间接寻址时也包含了地址增加的特性。
3 特殊功能寄存器下面简要介绍5个特殊功能寄存器。
①CANDAR。
该读/写寄存器定义通过CANDAT访问的PeliCAN内部寄存器的地址,可以将其解释为对PeliCAN的一个指针。
对PeliCAN块寄存器的读/写访问通过CANDAT寄存器执行。
通过地址自动增加模式,为CAN控制寄存器提供了快速的类似栈的读/写。
如果CANADR内当前定义的地址大于或等于32(十进制),CANADR的内容在任意对CANDAT读/写操作后自动增加。
例如,将一个信息装入发送缓冲区可通过将发送缓冲区的首地址(112)写入CANADR,然后将信息字节一个接一个写入CANDAT。
CANADR超过FFH后复位为00H。
如果CANADR小于32,不会执行自动地址增加。
即使CANDAT执行读或写,CANADR的值仍保持不变。
这允许在PeliCAN控制器的低地址空间进行寄存器轮询。
②CANDAT CANDAT作为一个读/写寄存器。
特殊功能寄存器CANDAT看上去是对CANADR所选的CAN控制器内部寄存器的一个端口。
对CANDAT寄存器的读写等效于对该内部寄存器的访问。
需要注意的是,如果CANADR中当前的地址大于等于32,那么任何对CANDAT的访问将使LANADR自动增加。
③CANMOD对PeliCAN模块寄存器CANMOD是直接进行读写访问的,模式寄存器位于PeliCAN模块中的地址00H。
④CANSTA根据访问方向的不同,CANSTA提供对PeliCAN的状态寄存器和中断使能寄存器的直接访问。
对CANSTA的读操作是对PeliCAN的状态寄存器(地址2)进行访问。
对CANSTA的写操作是对中断使能寄存器(地址4)进行访问。
⑤CANCON。
根据访问方向的不同,CANCON提供对PeliCAN的状态寄存器中断使能寄存器的直接访问。
对CANSTA的CANSTA的读操作是对PeliCAN的状态寄存器(地址2)进行访问。
对CANSTA的写操作是对中断使能寄存器(地址4)进行访问。
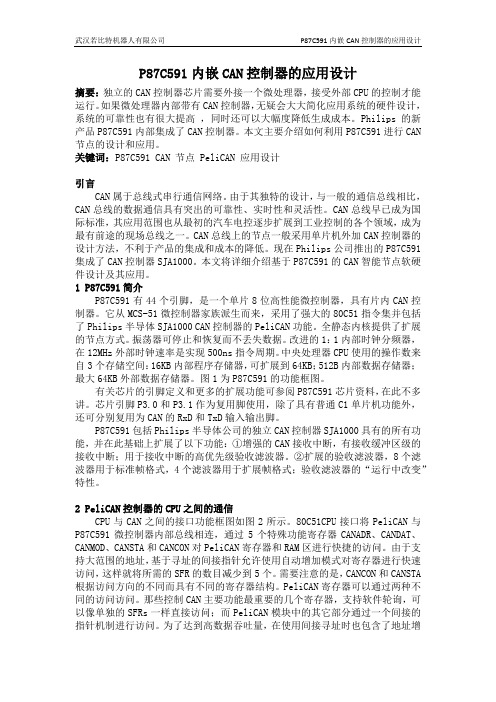
4 基于P87C591的CAN节点接口应用电路基于87C591的CAN节点接口应用电路十分简单,只需要附加一些CAN收发电路就可以进行CAN总线数据传输。
CAN收发芯片采用philips公司的TJA1050收发器。
为了增强CAN总线节点的抗干扰能力,SJA1000的TX0和RX0并不是直接与TJA1050的TXD和RXF相连,而是通过高速光电耦合器6N167与TJA1050相连。
这样,就可以很好地实现总线上的总CAN节点间的电器隔离。
不过,应该特别说明的一点是,光电耦合器采用的是两个独立的电源供电,电源Vcc和CAN_V 必须完全隔离,否则光耦也就失去了意义。
电源的完全隔离可采用小功率的电源隔离模块或通过带多路5V隔离输出的开关电源模块实现。
这样虽然电路复杂些,但却提高了节眯的稳定性和安全性,具体节点电路如图3所示。
5 CPU对PeliCAN的软件访问除了CANMOD、CANSTA、CANCON等PeliCAN常用特殊寄存器可以进行直接读/写访问除外,所有其它的CAN寄存器都需要进行间接寻址。
CANADR寄存器指向PeliCAN寄存器的地址,在写操作时将要送到被寻址寄存器的数据写入CANDAT;读操作时被寻址寄存器的数据可以从CANDAT中读出。
下面的例子说明了对PeliCAN寄存器的直接和间接寻址功能。
/*模式寄存器的直接寻址*/CANMOD=0x01;/*位RM置1进入复位模式*//*对位定时寄存器0和1的间接寻址*/CANADR=BTR0;/*将地址设置到BTR0寄存器*/CANDAT=0x45;/*将数据写入BTR0寄存器*/CANADR=BTR1;/*将地址设置到BTR1寄存器*/CANDAT=0x2B;/*将数据写入BTR1*/下面给出上述节点电路的CAN初始化部分的程序。
该程序可以直接应用到其它的系统程序之中。
初始化部分的源程序如下:#include<reg591.h>voidini_can_controller(void){CANMOD=0x01;/*进入复位模式,启动CAN初始化*/P1M2=P1M2 I 0x02;/*引脚TXDC设置为推挽模式*/CANSTA=0x03;/*使能接收和发送中断*/CANADR=BTR0;/*BTR0和BTR1编程为125kb/s,在12MHz条件下*/CANDAT=0x45;CANADR=BTR1;/*TSEG1=12,TSEG2=3,SJW=2*/CANDAT=0x2B;/*用户可根据具体的CAN网络来调整BTR0、BRT1的参数*/ CANADR=AMR10;/*设定接收屏蔽寄存器的址*/CANDAT=0xFF;/*Bank1:与接收屏蔽寄存器1无关,允许任何数据通过滤波器*/ CANDAT=0xFF;/*Bank1:与接收屏蔽寄存器无关,允许任何数据通过滤波器*/ CANDAT=0xFF;/*Bank1:与接收屏蔽寄存器3无关,允许任何数据通过滤波器*/ CANDAT=0xFF;/*Bank1:与接收屏蔽寄存4无关,允许任何数据通过滤波器*/ CANADR=ACFMODE;/*设定接收滤波器模式寄存器的地址*/CANDAT=0x01;/*设定BANK1为单滤波模式,标准帧*/CANADR=ACFENA;/*设定接收滤波器使能寄存器的地址*/CANDAT=0x01;/*使能BANK1的滤波器*/CANMOD=0x00;/*请求进入CAN的激活模式*/while(CANSTA & 0x80);/*等待总线激活*/}结语在CAN网络节点的设计中,使用集成的CAN控制器是大势所趋。
本文从硬件和软件的角度对内嵌CAN控制器(SJA1000)的P87C591进行了详细的介绍。
不仅给出了P87C591 CAN应用的外围电路接法,还给出了应用的初始化程序,这为以后的系开发提供了一个很好的基础。