哈工大 电机学 MATLAB 仿真 实验报告
哈工大 计算机仿真技术实验报告 实验七 基于Simulink的简单电力系统仿真实验

实验七 基于Simulink 的简单电力系统仿真实验一、实验目的1)掌握Simulink 的工作环境及SimPowerSystems 功能模块库的应用; 2)掌握Simulink 的powergui 模块的应用;3)掌握发电机的工作原理及稳态电力系统的计算方法;二、实验内容单机无穷大电力系统如图7-1所示。
平衡节点电压00 V V =︒ 。
负荷功率10L P kW =。
线路参数:电阻1l R =Ω;电感0.01l L H =。
发电机额定参数:额定功率100n P kW =;额定电压n V V =;额定励磁电流70 fn i A =;额定频率50n f Hz =。
发电机定子侧参数:0.26s R =Ω,1 1.14 L mH =,13.7 md L mH =,11 mq L mH =。
发电机转子侧参数:0.13f R =Ω,1 2.1 fd L mH =。
发电机阻尼绕组参数:0.0224kd R =Ω,1 1.4 kd L mH =,10.02kq R =Ω,11 1 kq L mH =。
发电机转动惯量和极对数分别为224.9 J kgm =和2p =。
发电机输出功率050 e P kW =时,系统运行达到稳态状态。
在发电机输出电磁功率分别为170 e P kW =和2100 e P kW =时,分析发电机、平衡节点电源和负载的电流、电磁功率变化曲线,以及发电机转速和功率角的变化曲线。
GV三、实验要求(1)利用SimPowerSystems库中的发电机模型、三相负荷模型建立系统的仿真模型;(2)利用powergui模块,对系统的稳态响应及发电机的初始值进行分析,并给发电机付初始值;(3)利用Bus Selector模块分选出需要的发电机输出参数。
利用Three-Phase V-I Measurement模块测量三相电压与电流参数。
(4)给出平衡节点电源和负载的电流、电磁功率变化曲线,以及发电机转速和功率角的变化曲线。
MATLAB仿真实验报告
MATLAB 仿真实验报告课题名称:MATLAB 仿真——图像处理学院:机电与信息工程学院专业:电子信息科学与技术年级班级:2012级电子二班一、实验目的1、掌握MATLAB处理图像的相关操作,熟悉相关的函数以及基本的MATLAB语句。
2、掌握对多维图像处理的相关技能,理解多维图像的相关性质3、熟悉Help 命令的使用,掌握对相关函数的查找,了解Demos下的MATLAB自带的原函数文件。
4、熟练掌握部分绘图函数的应用,能够处理多维图像。
二、实验条件MATLAB调试环境以及相关图像处理的基本MATLAB语句,会使用Help命令进行相关函数查找三、实验内容1、nddemo.m函数文件的相关介绍Manipulating Multidimensional ArraysMATLAB supports arrays with more than two dimensions. Multidimensional arrays can be numeric, character, cell, or structure arrays.Multidimensional arrays can be used to represent multivariate data. MATLAB provides a number of functions that directly support multidimensional arrays. Contents :●Creating multi-dimensional arrays 创建多维数组●Finding the dimensions寻找尺寸●Accessing elements 访问元素●Manipulating multi-dimensional arrays操纵多维数组●Selecting 2D matrices from multi-dimensional arrays从多维数组中选择二维矩阵(1)、Creating multi-dimensional arraysMultidimensional arrays in MATLAB are created the same way astwo-dimensional arrays. For example, first define the 3 by 3 matrix, and then add a third dimension.The CAT function is a useful tool for building multidimensional arrays. B =cat(DIM,A1,A2,...) builds a multidimensional array by concatenating(联系起来)A1, A2 ... along the dimension DIM. Calls to CAT can be nested(嵌套).(2)、Finding the dimensions SIZE and NDIMS return the size and number of dimensions of matrices.(3)、Accessing elements To access a single element of a multidimensional array, use integer subscripts(整数下标).(4)、Manipulating multi-dimensional arraysRESHAPE, PERMUTE, and SQUEEZE are used to manipulate n-dimensional arrays. RESHAPE behaves as it does for 2D arrays. The operation of PERMUTE is illustrated below.Let A be a 3 by 3 by 2 array. PERMUTE(A,[2 1 3]) returns an array with the row and column subscripts reversed (dimension 1 is the row, dimension 2 is the column, dimension 3 is the depth and so on). Similarly, PERMUTE(A,[3,2,1]) returns an array with the first and third subscripts interchanged.A = rand(3,3,2);B = permute(A, [2 1 3]);%permute:(转置)C = permute(A, [3 2 1]);(5)、Selecting 2D matrices from multi-dimensional arrays Functions like EIG that operate on planes or 2D matrices do not accept multi-dimensional arrays as arguments. To apply such functions to different planes of the multidimensional arrays, use indexing or FOR loops.For example: A = cat( 3, [1 2 3; 9 8 7; 4 6 5], [0 3 2; 8 8 4; 5 3 5], ...[6 4 7; 6 8 5; 5 4 3]);% The EIG function is applied to each of the horizontal 'slices' of A.for i = 1:3eig(squeeze(A(i,:,:))) %squeeze 除去size为1的维度endans =10.3589-1.00001.6411ans =21.22930.3854 + 1.5778i0.3854 - 1.5778ians =13.3706-1.6853 + 0.4757i-1.6853 - 0.4757iINTERP3, INTERPN, and NDGRID are examples of interpolation and data gridding functions that operate specifically on multidimensional data. Here is an example of NDGRID applied to an N-dimensional matrix.示例程序x1 = -2*pi:pi/10:0;x2 = 2*pi:pi/10:4*pi;x3 = 0:pi/10:2*pi;[x1,x2,x3] = ndgrid(x1,x2,x3);z = x1 + exp(cos(2*x2.^2)) + sin(x3.^3);slice(z,[5 10 15], 10, [5 12]); axis tight;程序运行结果:2、题目要求:编写程序,改变垂直于X轴的三个竖面的其中两个面的形状,绘制出图形。
哈工大 计算机仿真技术实验报告 仿真实验四基于Simulink控制系统仿真与综合设计
基于Simulink 控制系统仿真与综合设计一、实验目的(1) 熟悉Simulink 的工作环境及其功能模块库; (2) 掌握Simulink 的系统建模和仿真方法; (3) 掌握Simulink 仿真数据的输出方法与数据处理;(4) 掌握利用Simulink 进行控制系统的时域仿真分析与综合设计方法; (5) 掌握利用 Simulink 对控制系统的时域与频域性能指标分析方法。
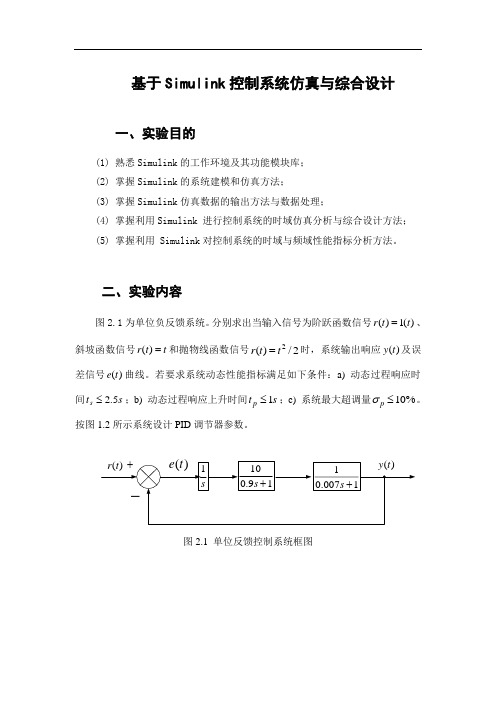
二、实验内容图2.1为单位负反馈系统。
分别求出当输入信号为阶跃函数信号)(1)(t t r =、斜坡函数信号t t r =)(和抛物线函数信号2/)(2t t r =时,系统输出响应)(t y 及误差信号)(t e 曲线。
若要求系统动态性能指标满足如下条件:a) 动态过程响应时间s t s 5.2≤;b) 动态过程响应上升时间s t p 1≤;c) 系统最大超调量%10≤p σ。
按图1.2所示系统设计PID 调节器参数。
图2.1 单位反馈控制系统框图图2.2 综合设计控制系统框图三、实验要求(1) 采用Simulink系统建模与系统仿真方法,完成仿真实验;(2) 利用Simulink中的Scope模块观察仿真结果,并从中分析系统时域性能指标(系统阶跃响应过渡过程时间,系统响应上升时间,系统响应振荡次数,系统最大超调量和系统稳态误差);(3) 利用Simulink中Signal Constraint模块对图2.2系统的PID参数进行综合设计,以确定其参数;(4) 对系统综合设计前后的主要性能指标进行对比分析,并给出PID参数的改变对闭环系统性能指标的影响。
四、实验步骤与方法4.1时域仿真分析实验步骤与方法在Simulink仿真环境中,打开simulink库,找出相应的单元部件模型,并拖至打开的模型窗口中,构造自己需要的仿真模型。
根据图2.1 所示的单位反馈控制系统框图建立其仿真模型,并对各个单元部件模型的参数进行设定。
所做出的仿真电路图如图4.1.1所示。
哈工大_基于matlab的直流电机双闭环调速系统的设计与仿真设计
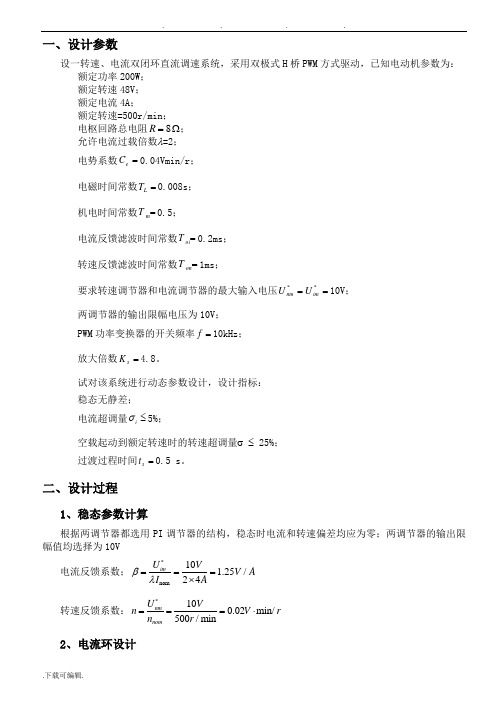
一、设计参数设一转速、电流双闭环直流调速系统,采用双极式H 桥PWM 方式驱动,已知电动机参数为:额定功率200W ; 额定转速48V ; 额定电流4A ;额定转速=500r/min ; 电枢回路总电阻8=R Ω; 允许电流过载倍数λ=2;电势系数=e C 0.04Vmin/r ; 电磁时间常数=L T 0.008s ; 机电时间常数=m T 0.5;电流反馈滤波时间常数=oi T 0.2ms ; 转速反馈滤波时间常数=on T 1ms ;要求转速调节器和电流调节器的最大输入电压==**im nmU U 10V ; 两调节器的输出限幅电压为10V ; PWM 功率变换器的开关频率=f 10kHz ; 放大倍数=s K 4.8。
试对该系统进行动态参数设计,设计指标: 稳态无静差; 电流超调量≤i σ5%;空载起动到额定转速时的转速超调量σ ≤ 25%; 过渡过程时间=s t 0.5 s 。
二、设计过程1、稳态参数计算根据两调节器都选用PI 调节器的结构,稳态时电流和转速偏差均应为零;两调节器的输出限幅值均选择为10V电流反馈系数;*nom 10 1.25/24im U VV A I Aβλ===⨯转速反馈系数:*100.02min/500/min nm nom U Vn V rn r ===⋅2、电流环设计1) 确定时间常数电流滤波时间常数0.2oi T ms =,按电流环小时间常数环节的近似处理方法,则s T T T oi s i 0003.00002.00001.0=+=+=∑2)选择电流调节器结构电流环可按典型Ⅰ型系统进行设计。
电流调节器选用PI 调节器,其传递函数为1()i ACR ii s G s K sττ+= 3)选择调节器参数超前时间常数:i τ=T L =0.008s电流环超调量为5%i σ≤,电流环开环增益:取0.5i i K T ∑=,则0.50.51666.670.0003I i K T ∑=== 于是,电流调节器比例系数为0.00881666.6717.7781.25 4.8i i I s R K K K τβ⨯=⋅=⨯=⨯ 4)检验近似条件电流环截止频率1666. 67 1/ci I K s ω== (1)近似条件1:13ci sT ω≤现在113333.3330.0003ci s T ω==>,满足近似条件。
哈工大 计算机仿真技术实验报告 实验六 基于Simulink的简单电力系统仿真
实验六 基于Simulink 的简单电力系统仿真(一:实验目的(1)掌握Simulink 的工作环境及SimPowerSystems 功能模块库的应用; (2)掌握Simulink 的电力电子电路建模和仿真方法; (3)掌握Simulink 下数学模型的仿真方法;(4)掌握升压、降压斩波电路(Buck Chopper )的工作原理及其工作特点; (5)掌握PID 控制对系统输出特性的影响。
二、实验原理通过降压斩波电路,电压发生降低,再通过桥式整流器将输入信号变为直流信号,再经过BWM 模块的作用,使输出波形变为三角波信号。
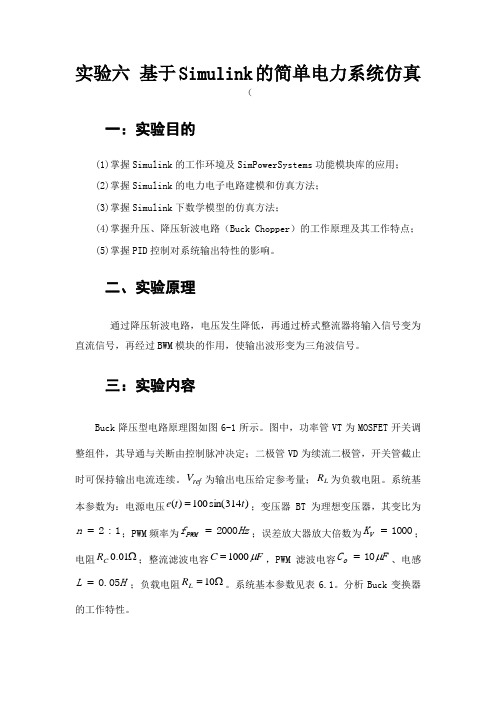
三:实验内容Buck 降压型电路原理图如图6-1所示。
图中,功率管VT 为MOSFET 开关调整组件,其导通与关断由控制脉冲决定;二极管VD 为续流二极管,开关管截止时可保持输出电流连续。
ref V 为输出电压给定参考量;L R 为负载电阻。
系统基本参数为:电源电压)314sin(100)(t t e =;变压器BT 为理想变压器,其变比为1:2=n ;PWM 频率为Hz f PWM 2000=;误差放大器放大倍数为1000=V K ;电阻Ω01.0C R ;整流滤波电容F C μ1000=,PWM 滤波电容F C o μ10=、电感H L 05.0=;负载电阻Ω=10L R 。
系统基本参数见表6.1。
分析Buck 变换器的工作特性。
表6.1 系统基本参数C R(Ω)C (F μ)o C(F μ)L(H)L R(Ω)V KnPWMf(Hz )0.01 100010 0.05 10 10002:12000K误差放大器比较器refV 锯齿波+-inu Di ini si 1:2LR oC LC R C)(t e 图6.1 Buck 变换器电路图o u VTBTVD+-ou Li +-L u四:实验仿真结果及分析五、实验总结利用simulink进行电子电路系统的仿真,形象直观。
一般步骤为:1、做出电路图,明确问题中所给出的各物理量及其相应的初值问题。
MATLAB电机控制综合仿真实验
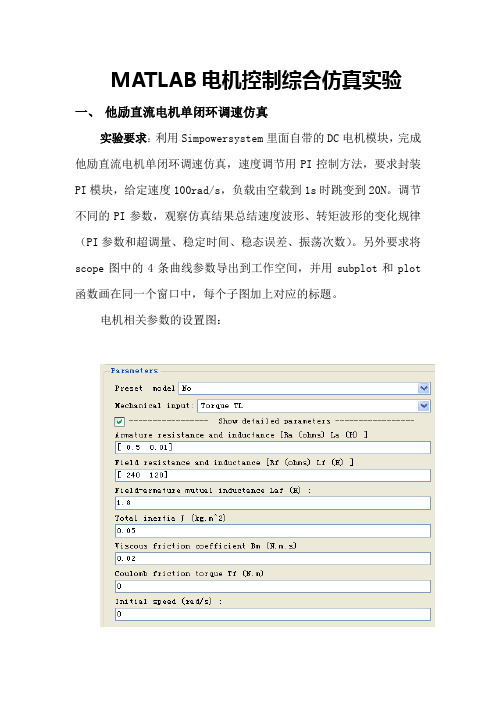
MATLAB电机控制综合仿真实验一、他励直流电机单闭环调速仿真实验要求:利用Simpowersystem里面自带的DC电机模块,完成他励直流电机单闭环调速仿真,速度调节用PI控制方法,要求封装PI模块,给定速度100rad/s,负载由空载到1s时跳变到20N。
调节不同的PI参数,观察仿真结果总结速度波形、转矩波形的变化规律(PI参数和超调量、稳定时间、稳态误差、振荡次数)。
另外要求将scope图中的4条曲线参数导出到工作空间,并用subplot和plot 函数画在同一个窗口中,每个子图加上对应的标题。
电机相关参数的设置图:仿真原理图:在仿真试验中需要按照实验要求对PI控制器子系统进行封装,然后更改Kp、Ki参数值的大小。
封装PI模块图如下:Plot绘图程序:>>subplot(411)>> plot(t,W,'r'),title('转速')>> subplot(412)>> plot(t,Ia,'b'),title('电枢电流')>> subplot(413)>> plot(t,Te,'g'),title('转矩')>> subplot(414)>> plot(t,If,'y'),title('励磁电流')速度调节用PI控制方法,给定速度100rad/s,负载由空载到1s 时跳变到20N,调节不同的PI参数,从PI模块封装中调节,修改不同的参数Ki 、Kp观察仿真结果。
Ki=100, Kp=5;050100w (r a d /s )00.51 1.52 2.53 3.54 4.55-2000200I a (A )-202I f (A )-1000100T e (N .m )Ki=2, Kp=1;w (r a d /s)I a (A)00.51 1.52 2.53 3.54 4.55I f (A)00.51 1.52 2.53 3.54 4.55T e (N .m )二、 他励直流电机闭环调速系统仿真实验要求:利用Simulink 基本模块搭建他励直流电机闭环调速系统直流电机子模块,根据以下电机数学模型搭建:电磁转矩公式:e M a T C I =Φ 动力学平衡方程:e L m d T T B J dtωω--=电机模块要求封装,参数20.05kg m J =⋅,0.02N m s m B =⋅⋅,165m C =,0.01Wb f Φ=,恒定负载T L =20N 点击封装模块时输入。
哈工大电机学仿真实验
电机学难重点的MA TLAB仿真实验报告班级:1111111学号:1111111111姓名:哈哈完成时间:2015.11.28实验一一、实验内容及目的1.实验内容型号为50Hz热轧硅钢片DR610-50(D21)的铁磁材料的基于Matlab的磁化曲线拟合。
2.实验目的1)了解磁化曲线的非线性和饱和特性2)掌握采用Matlab进行曲线拟合的方法二、实验要求及要点描述1.实验要求50Hz热轧硅钢片DR610-50(D21)磁化曲线1)绘制相关磁化曲线2)根据所提供的数据,合理选取全部和部分数据绘制磁化曲线,并进行比较,不少于4条曲线3)绘制每条磁化曲线对应的图和表4)在一个图中显示全部曲线,并进行区分2.实验要点1)采用屏幕图形方式直观显示2)利用编程方法和Matlab的拟合函数3)采用多种函数如多项式,指数函数,对数函数等进行拟合,并进行比较,最后给出拟合精度最高的表达式三、基本知识及实验方法描述1.基本知识在非铁磁材料中,磁通密度B 和磁场强度H 之间是线性关系,其系数就是空气的磁导率0μ。
而在铁磁材料中,二者是非线性关系,称为磁化曲线。
当外磁场由零逐渐增大时,开始磁感应强度B 随着磁场强度H 增加缓慢,磁感应强度B 随着H 的增大而迅速增长,接近于线性,之后增长放慢,并趋近于饱和,达到饱和后,磁化曲线基本上成为与非铁磁材料的B=0μH 特性相平行的直线。
一般的,磁化曲线分为起始段,直线段,饱和段和过饱和段四部分,其中直线段和饱和段的交界点就是曲线的膝点。
由于表征磁化曲线是用磁通密度B 和磁场强度H 两维数组表示的,是不连续的,而且其变化特征也比较复杂。
当数据量很大时,采用这种数组形式很不方便,也占用存储量。
最好的处理方式,是采用曲线拟合方法,把磁化曲线表示成显函数形式的解析表达式。
2.实验方法描述常用的曲线拟合方法有两种(1)最佳平方逼近。
该方法是连续函数的最近平方逼近问题,是用已知的一组互不相关的基函数,通过最佳平方逼近的方法求得未知的连续函数f (x )。
Matlab仿真实验报告
Matlab仿真实验报告姓名:黄涛学号:2011302540056学院:电气工程学院[在此处键入文档的摘要。
摘要通常是对文档内容的简短总结。
在此处键入文档的摘要。
摘要通常是对文档内容的简短总结。
]实验一直流电路一实验目的1、加深对直流电路的节点电压法和网孔电流法的理解。
2、学习MATLAB的矩阵运算方法。
二、实验内容:1、电阻电路的计算如图,已知:R1=2,R2=6,R3=12,R4=8,R5=12,R6=4,R7=2.(1) 如Us=10V,求i3,u4,u7;(2) 如U4=4V,求Us,i3,i7.(1)Z = [20 -12 0;-12 32 -12;0 -12 18];V = [10 0 0]';I = inv(Z)*V;i3 = I(1)-I(2);u4 = 8*I(2);u7 = 2*I(3);fprintf('i3=%f \n',i3)fprintf('u4=%f \n',u4)fprintf('u7=%f \n',u7)仿真结果:i3=0.357143u4=2.857143u7=0.476190(2)Z = [0 8 0;-12 32 -12;0 -12 18];V = [4 0 0]';I = inv(Z)*V;Us = 20*I(1)-12*I(2);i3 = I(1)-I(2);i7 = I(3);fprintf('Us=%f \n',Us)fprintf('i3=%f \n',i3)fprintf('i7=%f \n',i7)仿真结果:Us=14.000000i3=0.500000i7=0.3333332、求解电路里的电压,例如V1,V2,……V5.Y = [1 -1 2 -2 0;0 5 -13 8 0;2 0 4 -11 0;176 -5 5 -196 0;0 0 0 0 1];I = [0 -200 -120 0 24]';V = inv(Y)*I;fprintf('V1=%fV\nV2=%fV\nV3=%fV\nV4=%fV\nV5=%fV\n',V(1),V(2),V(3),V(4),V(5))仿真结果:V1=117.479167VV2=299.770833VV3=193.937500VV4=102.791667VV5=24.000000V3、如图,已知R1=R2=R3=4,R4=2,控制常数k1=0.5,k2=4,is=2,求i1和i2.Z = [1 0 0 0;-4 16 -8 -4;0 0 1 0.5;0 -8 4 6];V = [2 0 0 0]';I = inv(Z)*V;i1 = I(2)-I(3);i2 = I(4);fprintf('i1=%f V\ni2=%f V\n',i1,i2)仿真结果:i1=1.000000 Vi2=1.000000 V三、实验总结Matlab可用于计算矩阵,方便电路分析过程中的计算。
电机学matlab仿真大作业报告材料
基于MATLAB的电机学计算机辅助分析与仿真实验报告一、实验内容及目的1.1 单相变压器的效率和外特性曲线1.1.1 实验内容一台单相变压器,N S =2000kVA, kV kV U U N N 11/127/21=,50Hz ,变压器的参数和损耗为008.0*)75(=C k o R ,0725.0*=k X ,kW P 470=,kW P C KN o 160)75(=。
(1)求此变压器带上额定负载、)(8.0cos 2滞后=ϕ时的额定电压调整率和额定效率。
(2)分别求出当0.1,8.0,6.0,4.0,2.0cos 2=ϕ时变压器的效率曲线,并确定最大效率和达到负载效率时的负载电流。
(3)分析不同性质的负载(),(8.0cos 0.1cos ),(8.0cos 222超前,滞后===ϕϕϕ)对变压器输出特性的影响。
1.1.2 实验目的(1)计算此变压器在已知负载下的额定电压调整率和额定效率 (2)了解变压器效率曲线的变化规律 (3)了解负载功率因数对效率曲线的影响 (4)了解变压器电压变化率的变化规律 (5)了解负载性质对电压变化率特性的影响1.1.3 实验用到的基本知识和理论(1)标幺值、效率区间、空载损耗、短路损耗等概念 (2)效率和效率特性的知识 (3)电压调整率的相关知识1.2串励直流电动机的运行特性1.2.1实验内容一台16kw 、220V 的串励直流电动机,串励绕组电阻为0.12Ω,电枢总电阻为0.2Ω。
电动势常数为.电机的磁化曲线近似的为直线。
其中为比例常数。
假设电枢电流85A 时,磁路饱和(为比较不同饱和电流对应的效果,饱和电流可以自己改变)。
试分析该电动机的工作特性和机械特性。
1.2.2实验目的(1)了解并掌握串励电动机的工作特性和机械特性(2)了解磁路饱和对电动机特性的影响1.2.3实验用到的基本知识和理论(1)电动机转速、电磁转矩、电枢电流、磁化曲线等(2)串励电动机的工作特性和机械特性,电动机磁化曲线的近似处理二、实验要求及要点描述2.1 单相变压器的效率和外特性曲线(1)采用屏幕图形的方式直观显示;(2)利用MATLAB编程方法或SIMULINK建模的方法实现;cos 的效率曲线;(3)要画出对应不同2(4)要画出对应阻性、感性、容性三种负载性质的特性曲线,且通过额定点;(5)要给出特征性的结论。
哈工大机电系统控制基础大作业Matlab时域分析
《机电系统控制基础》大作业一基于MATLAB的机电控制系统响应分析哈尔滨工业大学2013年12月12日1作业题目1. 用MATLAB 绘制系统2()25()()425C s s R s s s Φ==++的单位阶跃响应曲线、单位斜坡响应曲线。
2. 用MATLAB 求系统2()25()()425C s s R s s s Φ==++的单位阶跃响应性能指标:上升时间、峰值时间、调节时间和超调量。
3. 数控直线运动工作平台位置控制示意图如下:X i伺服电机原理图如下:LR(1)假定电动机转子轴上的转动惯量为J 1,减速器输出轴上的转动惯量为J 2,减速器减速比为i ,滚珠丝杠的螺距为P ,试计算折算到电机主轴上的总的转动惯量J ;(2)假定工作台质量m ,给定环节的传递函数为K a ,放大环节的传递函数为K b ,包括检测装置在内的反馈环节传递函数为K c ,电动机的反电势常数为K d ,电动机的电磁力矩常数为K m ,试建立该数控直线工作平台的数学模型,画出其控制系统框图;(3)忽略电感L 时,令参数K a =K c =K d =R=J=1,K m =10,P/i =4π,利用MATLAB 分析kb 的取值对于系统的性能的影响。
源代码:t=[0:0.01:5];u=t;C=[25],R=[1,4,25];G=tf(C,R);[y1,T]=step(G,t);y2=lsim(G,u,t);subplot(121),plot(T,y1);xlabel('t(sec)'),ylabel('x(t)'); grid on;subplot(122),plot(t,y2);grid on;xlabel('t(sec)'),ylabel('x(t)');仿真结果及分析:源代码:t=[0:0.001:1];yss=1;dta=0.02;C=[25],R=[1,4,25];G=tf(C,R);y=step(G,t);r=1;while y(r)<yss;r=r+1;endtr=(r-1)*0.001;[ymax,tp]=max(y);tp1=(tp-1)*0.001;mp=(ymax-yss)/yss;s=1001;while y(s)>1-dta && y(s)<1+dta;s=s-1;endts=(s-1)*0.001;[tr tp1 mp ts]仿真结果及分析:C = 25ans = 0.4330 0.6860 0.2538 1.0000由输出结果知:上升时间为0.4330秒,峰值时间为0.6860秒,最大超调量为0.2538,调整时间1.0000秒。
电机学matlab仿真大作业报告
电机学matlab仿真大作业报告第一篇:电机学matlab仿真大作业报告基于MATLAB的电机学计算机辅助分析与仿真实验报告一、实验内容及目的1.1 单相变压器的效率和外特性曲线1.1.1 实验内容一台单相变压器,SN=2000kVA, U1N/U2N=127kV/11kV,50Hz,变压器的参数**=0.008和损耗为Rk,X=0.0725,P0=47kW,PKN(75oC)=160kW。
ok(75C)(1)求此变压器带上额定负载、cosϕ2=0.8(滞后)时的额定电压调整率和额定效率。
(2)分别求出当cosϕ2=0.2,0.4,0.6,0.8,1.0时变压器的效率曲线,并确定最大效率和达到负载效率时的负载电流。
(3)分析不同性质的负载(cosϕ2=0.8(滞后),cosϕ2=1.0,cosϕ2=0.8(超前),)对变压器输出特性的影响。
1.1.2 实验目的(1)计算此变压器在已知负载下的额定电压调整率和额定效率(2)了解变压器效率曲线的变化规律(3)了解负载功率因数对效率曲线的影响(4)了解变压器电压变化率的变化规律(5)了解负载性质对电压变化率特性的影响1.1.3 实验用到的基本知识和理论(1)标幺值、效率区间、空载损耗、短路损耗等概念(2)效率和效率特性的知识(3)电压调整率的相关知识1.2串励直流电动机的运行特性1.2.1实验内容一台16kw、220V的串励直流电动机,串励绕组电阻为0.12Ω,电枢总电阻为0.2Ω。
电动势常数为.电机的磁化曲线近似的为直线。
其中为比例常数。
假设电枢电流85A 时,磁路饱和(为比较不同饱和电流对应的效果,饱和电流可以自己改变)。
试分析该电动机的工作特性和机械特性。
1.2.2实验目的(1)了解并掌握串励电动机的工作特性和机械特性(2)了解磁路饱和对电动机特性的影响1.2.3实验用到的基本知识和理论(1)电动机转速、电磁转矩、电枢电流、磁化曲线等(2)串励电动机的工作特性和机械特性,电动机磁化曲线的近似处理二、实验要求及要点描述2.1 单相变压器的效率和外特性曲线(1)采用屏幕图形的方式直观显示;(2)利用MATLAB编程方法或SIMULINK建模的方法实现;(3)要画出对应不同cosϕ2的效率曲线;(4)要画出对应阻性、感性、容性三种负载性质的特性曲线,且通过额定点;(5)要给出特征性的结论。
matlab 仿真实验报告

matlab 仿真实验报告Matlab 仿真实验报告引言:在科学研究和工程应用中,仿真实验是一种非常重要的手段。
通过在计算机上建立数学模型和进行仿真实验,我们可以更好地理解和预测现实世界中的各种现象和问题。
Matlab作为一种强大的科学计算软件,被广泛应用于各个领域的仿真实验中。
本文将介绍我进行的一次基于Matlab的仿真实验,并对实验结果进行分析和讨论。
实验背景:在电子通信领域中,信号的传输和接收是一个重要的研究方向。
而在进行信号传输时,会受到各种信道的影响,如噪声、衰落等。
为了更好地理解信道的特性和优化信号传输方案,我进行了一次关于信道传输的仿真实验。
实验目的:本次实验的目的是通过Matlab仿真,研究不同信道条件下信号传输的性能,并对比分析不同传输方案的优劣。
实验步骤:1. 信道建模:首先,我需要建立信道的数学模型。
根据实际情况,我选择了常见的高斯信道模型作为仿真对象。
通过Matlab提供的函数,我可以很方便地生成高斯噪声,并将其加入到信号中。
2. 信号传输方案设计:接下来,我需要设计不同的信号传输方案。
在实验中,我选择了两种常见的调制方式:频移键控(FSK)和相移键控(PSK)。
通过调整不同的调制参数,我可以模拟不同的传输效果。
3. 信号传输仿真:在信道模型和传输方案设计完成后,我开始进行信号传输的仿真实验。
通过Matlab提供的信号处理函数,我可以很方便地生成调制后的信号,并将其传输到信道中。
4. 信号接收和解调:在信号传输完成后,我需要进行信号接收和解调。
通过Matlab提供的信号处理函数,我可以很方便地对接收到的信号进行解调,并还原出原始的信息信号。
5. 仿真结果分析:最后,我对仿真结果进行分析和讨论。
通过对比不同信道条件下的传输性能,我可以评估不同传输方案的优劣,并得出一些有价值的结论。
实验结果与讨论:通过对不同信道条件下的信号传输仿真实验,我得到了一些有价值的结果。
首先,我观察到在高斯噪声较大的信道条件下,PSK调制比FSK调制具有更好的抗干扰性能。
哈工大 电机学 MATLAB 仿真 实验报告
基于MATLAB的电机学计算机辅助分析与仿真实验报告班级:学号:姓名:完成时间:一、实验内容1.1单相变压器不同负载性质的相量图通过MATLAB 画出单相变压器带感性,阻性,容性三种不同性质负载的变压器向量图1.2感应电机的S T -曲线通过MATLAB 画出三相感应电动机的转矩转差率曲线二、实验要求2.1单相变压器不同负载性质的相量图根据给定的仿真实例画出负载相位角30,0,302-=j 三种情况下得向量图,观察电压大小与相位的关系,了解总结负载性质不同对向量图的影响2.2感应电机的S T -曲线根据给定的实例,画出3.1~3.1-=s 的S T -曲线,了解感应电机临界转差率的大小和稳定工作区间的大小,给出定性分析三、实验方法3.1单相变压器不同负载性质的相量图1.单相变压器不同负载性质的相量图 (1)先画出负载电压'2U 的相量;(2)根据负载的性质和阻抗角画出二次电流(规算值)的相量(3)在2U 上加上一个与电流方向相同的压降,其大小为二次电流规算值'2I 与二次漏电阻规算值'2R 之积;再加上一个超前电流方向︒90的压降,其大小为二次电流'2I 规算值与二次漏电抗规算值'2χ之积; (4)根据上一步结果连线,得出'2E ; (5)超前'2E 方向︒90画出m Φ;(6)根据励磁电阻与电抗的大小得出励磁阻抗角,并超前m Φ一个励磁阻抗角的大小得出m I 的方向;(7)根据平行四边形法则,做出'2I -与m I 的和,即为1I ; (8)根据'21E E =得出1E ,并得出1E -。
(9)在1E -上加上一个与电流方向相同的压降,其大小为一次电流1I 与一次漏电阻1R 之积;再加上一个超前电流方向︒90的压降,其大小为一次电流1I 与一次漏电抗1χ之积;(10) 根据上一步结果连线,得出1U ;3.2感应电机的S T -曲线实验采用matlab 对转矩转差率曲线进行仿真。
MatLab仿真实验报告

实验一 一阶系统及二阶系统时域特性MatLab 仿真实验 一:实验目的1、通过实验中的系统设计及理论分析方法,进一步理解自动控制系统的设计与分析方法。
2、熟悉仿真分析软件。
3、利用Matlab 对一、二阶系统进行时域分析。
4、掌握一阶系统的时域特性,理解常数T 对系统性能的影响。
5、掌握二阶系统的时域特性,理解二阶系统重要参数对系统性能的影响。
二、实验设备计算机和Matlab 仿真软件。
三、实验内容1、一阶系统时域特性 一阶系统11)(+=Ts s G ,影响系统特性的参数是其时间常数T ,T 越大,系统的惯性越大,系统响应越慢。
Matlab 编程仿真T=0.4,1.2,2.0,2.8,3.6,4.4系统单位阶跃响应。
2、二阶系统时域特性a 、二阶线性系统 16416)(2++=s s s G 单位脉冲响应、单位阶跃响应、单位正弦输入响应的 Matlab 仿真。
b 、二阶线性系统3612362++s s ξ,当ξ为0.1,0.2,0.5,0.7,1.0,2.0时,完成单位阶跃响应的Matlab 仿真,分析ξ值对系统响应性能指标的影响。
四、实验步骤1、一阶系统时域特性clearclcnum=1for del=0.4:0.8:4.4den=[del 1];step(tf(num,den))hold onendlegend('t=0.4','t=1.2','t=2.0','t=2.8','t=3.6','t=4.4') 2、二阶系统时域特性a、clearclcnum=16den=[1 4 16]sys=tf(num,den)[y1,t1]=impulse(sys)impulse(sys)figure ,plot(t1,y1)[y2,t2]=step(sys)step(sys)figure ,plot(t2,y2)hold ont=0:0.1:20figure,lsim(sys,sin(t),t)hold onc、clearclcnum=[0 0 4];den=[1 0.5 4];t=0:0.1:10;step(num,den,t)gridtitle('Step-Response Curves of G(s)=4/[s^2+2s+4]')num=[0 0 36]; den1=[1 1.2 36]; den2=[1 2.4 36]; den3=[1 4.8 36]; den4=[1 8.4 36]; den5=[1 12 36]; den6=[1 24 36];t=0:0.1:10; step(num,den1,t)gridtext(4,1.7,'Zeta=0.1'); holdstep(num,den2,t)text(3.3,1.5,'0.2')step(num,den3,t)text(3.5,1.2,'0.4')step(num,den4,t)text(3.3,0.9,'0.7')step(num,den5,t)text(3.3,0.6,'1.0')step(num,den6,t)text(3.0,0.4,'2.0')title('Step-Response Curves for G(s)=36/[s^2+12(zeta)s+1]')五、实验结果1、2、a、b、。
matlab 模拟 实验报告
matlab 模拟实验报告《利用Matlab模拟的实验报告》摘要:本实验利用Matlab软件对某一特定系统进行了模拟实验。
通过对系统的建模和仿真,我们得出了一些有价值的结论,并对系统的性能进行了评估。
本文将详细介绍实验的目的、方法、结果和分析,以及对实验结果的讨论和总结。
1. 引言Matlab是一种强大的数学建模和仿真工具,广泛应用于工程、科学和技术领域。
利用Matlab进行系统仿真可以帮助我们更好地理解系统的行为和性能,优化系统设计,并预测系统在不同条件下的表现。
本实验旨在利用Matlab对某一特定系统进行仿真,以验证系统的性能和稳定性。
2. 实验目的本实验的主要目的是利用Matlab对某一特定系统进行建模和仿真,分析系统的动态响应和稳定性,并评估系统的性能。
具体来说,我们将通过仿真实验探讨系统的频率响应、阶跃响应和脉冲响应,以及系统的稳定性和鲁棒性。
3. 实验方法首先,我们对系统进行了建模,包括系统的传递函数、状态空间模型等。
然后,利用Matlab软件进行仿真实验,分别对系统的频率响应、阶跃响应和脉冲响应进行了分析。
最后,我们对仿真结果进行了统计和评估,得出了一些有价值的结论。
4. 实验结果与分析通过Matlab的仿真实验,我们得到了系统的频率响应曲线、阶跃响应曲线和脉冲响应曲线。
通过对这些曲线的分析,我们可以得出系统的动态特性和稳定性。
同时,我们还对系统的性能进行了评估,包括系统的超调量、调节时间等指标。
5. 结果讨论与总结通过对实验结果的讨论和总结,我们得出了一些结论和建议。
我们对系统的性能和稳定性进行了评估,发现系统在某些条件下存在一些问题,提出了一些建议和改进措施。
同时,我们也对Matlab软件在系统仿真中的应用进行了总结和展望。
结论本实验利用Matlab对某一特定系统进行了建模和仿真,得出了一些有价值的结论。
通过对系统的动态响应和稳定性进行分析,我们发现了系统存在的一些问题,并提出了一些建议和改进措施。
完整word版,《Matlab与机电系统仿真》实验报告模板

《Matlab 与机电系统仿真》实验报告一班级:电气112 姓名:潘志伟 学号:201106010221一、实验名称:MATLAB 基本操作与矩阵运算一、实验目的1、熟悉Matlab 软件的基本操作方法2、掌握Matlab 矩阵和数组的基本运算3、了解Matlab 的常用函数的使用方法二、实验学时:2学时三、实验原理:略四、实验内容:1.自由练习Matlab 软件的操作2、已知矩阵 A=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡987654321。
(1)利用Matlab 命令求矩阵A 的对角线之和。
(2)从矩阵A 中提取子矩阵⎥⎦⎤⎢⎣⎡8754,(3)对矩阵A 中的第二行元素置零。
3.矩阵A 、B 、C 、D 定义如下:⎥⎦⎤⎢⎣⎡--=1122A ,⎥⎦⎤⎢⎣⎡-=2011B ,⎥⎦⎤⎢⎣⎡-=21C ,D=eye (2)。
求出下列矩阵运算操作的结果,并解释部分操作无法实现的原因。
(1)R=A+B(2)R=A*D(3)R=A.*B(4)R=A*C(5)R=A.*C(6)R=A\B(7)R=A.\B(8)R=A.^B五、实验结果:1.实验程序:A=[1 2 3;4 5 6;7 8 9]; s=0;for i=1:3;s=s+A(i,i);endsm=[2 3];n=[1 2];At=A(m,n)A(2,:)=0实验结果:s =15At =4 57 8A =1 2 30 0 07 8 92.实验程序:A=[2 -2;-1 1];B=[1 -1;0 2];C=[1 -2].';D=eye(2);R1=A+BR2=A*DR3=A.*BR4=A*CR5=A.*CR6=A\BR=A.\BR=A.^B实验结果:R1 =3 -3-1 3R2 =2 -2-1 1R3 =2 20 2R4 =6-3错误使用 .*矩阵维度必须一致。
出错lianxi2 (line 9)R5=A.*CR6 =Inf InfInf Inf原因:A左除B等于A的逆乘B,A为逆矩阵,不存在逆矩阵。
MATLAB实验报告
《M A T L A B /S i m u l i n k 与控制系统仿真》实验报告专业:班级:学号:姓名:指导教师:实验1、MATLAB/Simulink 仿真基础及控制系统模型的建立一、实验目的1、掌握MATLAB/Simulink 仿真的基本知识;2、熟练应用MATLAB 软件建立控制系统模型。
二、实验设备电脑一台;MATLAB 仿真软件一个三、实验内容1、熟悉MATLAB/Smulink 仿真软件。
2、一个单位负反馈二阶系统,其开环传递函数为210()3G s s s=+。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
图系统结构图图示波器输出结果图3、某控制系统的传递函数为()()()1()Y s G s X s G s =+,其中250()23sG s s s+=+。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
图系统结构图图示波器输出结果图图工作空间中仿真结果图形化输出4、一闭环系统结构如图所示,其中系统前向通道的传递函数为320.520()0.11220s G s s s s s+=+++,而且前向通道有一个[-0.2,0.5]的限幅环节,图中用N 表示,反馈通道的增益为1.5,系统为负反馈,阶跃输入经1.5倍的增益作用到系统。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
图系统结构图图示波器输出结果实验2MATLAB/Simulink 在控制系统建模中的应用一、实验目的1、掌握MATLAB/Simulink 在控制系统建模中的应用;二、实验设备电脑一台;MATLAB 仿真软件一个三、实验内容1、给定RLC 网络如图所示。
MATLAB实验三实验报告
实验名称:simulink 仿真建模 教
时间:2011 年 5 月 12 日 师
地点:工科类 503 评
班组:09 电气工程及其自动化 语
学号:宋 发 林
姓名: 2009160148
成绩
教师签名
实验三 MATLAB 的 simulink 仿真建模
一.实验目的和要求
了解 simulink 仿真的基本概念及步骤,学会初步的仿真建模。
二.实验内容或原理
运行 MATLAB 软件,打开 simulink 系统,练习搭建 simulink 仿真模型解决基本数学及专
业问题。
(1).学会 simulink 的三种运行方式
X 波形。
c.如图所示的感应电机等效电路图,交流电压源为 200v,50Hz,其他参数 R1=0.428Ω
L1=L2=1.926mH,R2=1.551ΩR3=1.803Ω,L3=31.2mH,观察 R3 上的电压波形。
d. 电 路 如 图 示 , 已 知 R1=33k Ω ,R2=22k Ω L=200mH,C=2.2uF , 电 流 源 电 流 为
a.已知如右图电路中,R1=50ΩR2=- R4=100Ω,R3=20Ω- ,R5=10Ω,U=100V,搭建 simulink
-
பைடு நூலகம்
仿真模型求各环路电流 i1,i2,i3 的值。
a.
R3
R4
i3
c R1
R1
i1
R5
U
U
R2
i2
L1
R2
L2
L3
R3
电机MATLAB仿真实验
实验一单相变压器空载仿真实验一、实验目的1 用仿真的方法了解并求取变压器的空载特性。
2 通过变压器空载仿真了解并求取变压器的参数和损耗。
二、预习要点1 变压器空载运行有什么特点?2 在变压器空载实验仿真中,如何通过仿真测取变压器的铁耗。
三、仿真项目1 完成变压器空载运行仿真模型的搭建和参数设定。
2 仿真测取空载特性U0=f(I0),P0= f(U0),cosΦ0= f(U0)。
四、仿真方法1 仿真模块2 仿真模型图1 变压器空载实验接线图图2 单相变压器空载仿真模型示例图图3 变压器参数设置示例图(右侧饱和曲线数据请输入到左侧Saturation Characteristic一栏)3 空载仿真1)根据图1的接线图进行仿真模型搭建,搭建仿真模型如图2所示,所有频率的设置均改成50。
2)对单相变压器以及其他元器件模块的参数设置,选定额定电压,变压器变比等。
设定其额定容量S N=77 V A,U1N/U2N=55/220V。
变压器低压侧接电源,高压侧开路。
变压器参数设置如图3所示。
3)可自行根据需要选择需要测量的波形以及有效值量,加入示波器以及计算模块进行测量并设定仿真时间。
4)调节电压源电压,调节范围在(1.25~0.2)U N范围内,测取变压器的U0,I0,P0,cosΦ0以及二次侧电压U AX等数据。
5)测取数据时,在额定电压附近侧的点较密,共测取10组数据记录于下表。
表1 空载实验数据五、实验报告1. 完成表12. 绘制U0-I0特性曲线3. 计算变压器变比4. 计算低压侧的励磁参数实验二单相变压器短路仿真实验一、实验目的1 用仿真的方法了解并求取变压器的短路特性。
2 通过变压器短路仿真了解并求取变压器的参数和损耗。
二、预习要点1 变压器短路运行有什么特点?2 在变压器短路实验仿真中,如何通过仿真测取变压器的铜耗。
三、仿真项目1 完成变压器短路运行仿真模型的搭建和参数设定。
2 仿真测取短路特性U K=f(I K),P K= f(U K),cosΦK= f(U K)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于MATLAB的电机学计算机辅助分析与仿真实验报告班级:学号:姓名:完成时间:一、实验内容1.1单相变压器不同负载性质的相量图通过MATLAB 画出单相变压器带感性,阻性,容性三种不同性质负载的变压器向量图1.2感应电机的S T -曲线通过MATLAB 画出三相感应电动机的转矩转差率曲线二、实验要求2.1单相变压器不同负载性质的相量图根据给定的仿真实例画出负载相位角30,0,302-=j 三种情况下得向量图,观察电压大小与相位的关系,了解总结负载性质不同对向量图的影响2.2感应电机的S T -曲线根据给定的实例,画出3.1~3.1-=s 的S T -曲线,了解感应电机临界转差率的大小和稳定工作区间的大小,给出定性分析三、实验方法3.1单相变压器不同负载性质的相量图1.单相变压器不同负载性质的相量图 (1)先画出负载电压'2U 的相量;(2)根据负载的性质和阻抗角画出二次电流(规算值)的相量(3)在2U 上加上一个与电流方向相同的压降,其大小为二次电流规算值'2I 与二次漏电阻规算值'2R 之积;再加上一个超前电流方向︒90的压降,其大小为二次电流'2I 规算值与二次漏电抗规算值'2χ之积; (4)根据上一步结果连线,得出'2E ; (5)超前'2E 方向︒90画出m Φ;(6)根据励磁电阻与电抗的大小得出励磁阻抗角,并超前m Φ一个励磁阻抗角的大小得出m I 的方向;(7)根据平行四边形法则,做出'2I -与m I 的和,即为1I ; (8)根据'21E E =得出1E ,并得出1E -。
(9)在1E -上加上一个与电流方向相同的压降,其大小为一次电流1I 与一次漏电阻1R 之积;再加上一个超前电流方向︒90的压降,其大小为一次电流1I 与一次漏电抗1χ之积;(10) 根据上一步结果连线,得出1U ;3.2感应电机的S T -曲线实验采用matlab 对转矩转差率曲线进行仿真。
由转矩转差率关系公式知,221221221)()(xc x sr cr sr U m T ss+++∙Ω=只有s 为自变量,其他参数均为已知。
编程时,先取s 在0.01-1.3正区间的S T -,进行绘图;再取相应负区间对S T -绘图;最后加入(0,0)四、实验源程序(1分)4.1单相变压器不同负载性质的相量图见附录4.2感应电机的T-S 曲线%T-S 曲线绘制 %定义常量 R2 = 0.04; R1 = 0.06; M1 = 3; U1 = 380; W = 2*pi*1485/60; X1 = 0.27; X2 = 0.56; C = 1+X1/16.4;%画出s=0.01~1.3的T-S 曲线 s = 0.01:0.01:1.3; T=ones(1,length(s));for i = 1:length(s)T2(i) = R2/s(i);T1(i) = 1/((R1 + C*T2(i))^2 + (X1 + C*X2)^2); T3(i) = 1/W;T(i) = M1*U1^2*T1(i)*T2(i)*T3(i);end%画出s=-0.01~-1.3的T-S曲线s1 = -1.3:0.01:-0.01;T1=ones(1,length(s1));for i = 1:130T21(i) = R2/s1(i);T11(i) = 1/((R1 + C*T21(i))^2 + (X1 + C*X2)^2); T31(i) = 1/W;T1(i) = M1*U1^2*T11(i)*T21(i)*T31(i);end%将(0,0)加入曲线中,合并成完整的向量ss=[s1 0 s];TT=[T1 0 T];plot(ss,TT);%改变x轴方向set(gca,'XDir','rev');title('感应电机转矩转差率曲线');xlabel('rotating speed slip (%)')ylabel('Torque (Nm)')五、实验结果5.1单相变压器不同负载性质的相量图不同性质负载对相量图带来的影响:(1) 二次电流I2在负载性质为感性、容性时分别超前、滞后负载电压U2一个阻抗角的大小;纯阻性负载时I2与U2同方向;(2) 在容性负载时,负载电压U2有可能大于感应电动势E2。
5.2感应电机的T-S曲线实验结果如下:通过Matlab仿真得到感应电机的ST-曲线如下图;可以看出实验的曲线和理论预测基本相符,实验的仿真结果较为成功。
曲线的特点:(1) 曲线不是单调的而是像一个山峰一样,存在最大转矩点和对应的临界转差率。
(2) 从特性上看,电机的最大转矩很大,但是对应1s的起动点,转矩却很小;=(3) 曲线的正负半区基本对称六、心得体会做负载性质的的实验时,最先遇到的问题就是如何画出向量图,我们查找了许多资料,例如使用compass函数,但compass函数是从原点开始画向量图,且有背景,又如quiver函数,也不能满足要求,最后决定自己在线段终点处画出两个微小的与该线段成一比较小的角度的线段作为箭头,这也是我本次一个很大的收获,学会灵活的运用知识,而不是一味想使用程序内置的函数,做实验,搞科研的时候要灵活。
在绘制不同负载的曲线时,我也进一步的理解了曲线的绘制步骤,对单相变压器有了更深的理解。
在绘制T-S时,我们同样也遇到了问题,当程序第一次运行时,会出现错误的提示,就是向量的长度不匹配,但是第二次运行却能够正常运行。
调试了多次后还是没有结果,最后在老师的帮助下,我们终于找到了原因,所使用的矩阵应该先声明一个长度与其等式另一侧的矩阵维数相匹配,才能够正常运行。
在绘制T-S时,我也更加理解了转矩与转差率的关系,也了解了电机的起动转矩和最大转矩,以及稳定运行的区间。
通过这次实验,我更加意识到了MATLAB的重要性,虽然上学期我们学习了数学实验这门课,并且初步学习了Matlab的使用方法,但是数学实验上所学的毕竟只是基本的操作和一些简单的程序,没有经过大的检验和锻炼。
当这次作业再一次重新使用MATLAB时,起初感觉十分的不熟练,之后抽出一部分时间练习Matlab。
正所谓磨刀不误砍柴工,通过训练,我的Matlab越来越熟练,后面的工作也越来越快。
未来我们的工作离不开计算机,未来熟练的掌握计算机基础知识对于我们来说是十分必要的。
这次实验,不仅提高了我的电机学知识水平,也帮助我更加熟练地掌握的MATLAB的使用方法,对以后的工作学习有着巨大的帮助。
最重要的是,我们的成功离不开老师的耐心指导,我们的几个难点都是在老师的耐心帮助下才得以解决的。
可以说,老师的帮助与指导与我们的成功密不可分。
七、附录% 单相变压器负载运行时不同负载阻抗下的向量图clear;clf;clc;f=50;N1=876;N2=260;u2=6000;i2=180;k=N1/N2;% 调整阻、抗的比例r1n=5.5;x1n=12.4;rm=850;xm=8600;r2n=k^2*0.45;x2n=k^2*0.964;% 变压器二次侧负载阻抗角, 取-90 -30 0 30 90theta=-30;% 为了使图形更加直观,放大原副端阻抗三角形beta=8;r1=beta*r1n;r2=beta*r2n;x1=beta*x1n;x2=beta*x2n;Z1=r1+j*x1;Z2=r2+j*x2;u22=k*u2;i22=i2/k;%U2的大小U2=u22;%U2与x轴的夹角theta_U2=atan2(imag(U2),real(U2));%I2落后与U2I2=i22*(cos(theta*pi/180)+j*sin(theta*pi/180));theta_I2=atan2(imag(I2),real(I2));%求出E2E2=U2+I2*Z2;theta_E2=atan2(imag(E2),real(E2));E1=E2;theta_E1=atan2(imag(E1),real(E1));% 为了使图形更加直观,放大Imkim=1.5;%求出主磁通fai=kim*E1/(-j*4.44*f*N1);theta_fai=atan2(imag(fai),real(fai));theta_fai1=theta_fai-pi/2;%求出ImIm=beta*(-E1)/(rm+j*xm);theta_Im=atan2(imag(Im),real(Im));%求出I1I1=Im-I2;theta_I1=atan2(imag(I1),real(I1));%求出U1U1=-E1+I1*r1+j*I1*x1;theta_U1=atan2(imag(U1),real(U1));ur1=I1*r1;theta_ur1=atan2(imag(ur1),real(ur1));ux1=j*I1*x1;theta_ux1=atan2(imag(ux1),real(ux1));ur2=I2*r2;theta_ur2=atan2(imag(ur2),real(ur2));ux2=j*I2*x2;theta_ux2=atan2(imag(ux2),real(ux2));rot_fai=abs(fai)*i;fai_amp=rot_fai*1e5;fai_ampr=real(fai_amp); fai_ampi=imag(fai_amp);rot_U2=abs(U2)*(cos(theta_U2-theta_fai1)+j*sin(theta_U2-theta_ fai1));U2r=real(rot_U2);U2i=imag(rot_U2);rot_E1=abs(E1)*(cos(theta_E1-theta_fai1)+j*sin(theta_E1-theta_ fai1));rE1r=real(-rot_E1);rE1i=imag(-rot_E1);rot_U1=abs(U1)*(cos(theta_U1-theta_fai1)+j*sin(theta_U1-theta_ fai1));U1r=real(rot_U1);U1i=imag(rot_U1);rot_E2=abs(E2)*(cos(theta_E2-theta_fai1)+j*sin(theta_E2-theta_ fai1));E2r=real(rot_E2);E2i=imag(rot_E2);rot_ur1=abs(ur1)*(cos(theta_ur1-theta_fai1)+j*sin(theta_ur1-th eta_fai1));ur1r=real(rot_ur1);ur1i=imag(rot_ur1);rot_ux1=abs(ux1)*(cos(theta_ux1-theta_fai1)+j*sin(theta_ux1-th eta_fai1));ux1r=real(rot_ux1);ux1i=imag(rot_ux1);rot_ur2=abs(ur2)*(cos(theta_ur2-theta_fai1)+j*sin(theta_ur2-th eta_fai1));ur2r=real(rot_ur2);ur2i=imag(rot_ur2);rot_ux2=abs(ux2)*(cos(theta_ux2-theta_fai1)+j*sin(theta_ux2-th eta_fai1));ux2r=real(rot_ux2);ux2i=imag(rot_ux2);rot_I1=abs(I1)*(cos(theta_I1-theta_fai1)+j*sin(theta_I1-theta_ fai1));I1r=real(rot_I1);I1i=imag(rot_I1);rot_I2=abs(I2)*(cos(theta_I2-theta_fai1)+j*sin(theta_I2-theta_ fai1));I2r=real(rot_I2);I2i=imag(rot_I2);rot_Im=abs(Im)*(cos(theta_Im-theta_fai1)+j*sin(theta_Im-theta_ fai1));Imr=real(rot_Im);Imi=imag(rot_Im);hold ona=[0 0];b=[U2r U2i];text(1.5e4,-0.5e4,'U2','Fontsize',10);x0 = a(1);y0 = a(2);x1 = b(1);y1 = b(2);plot([x0;x1],[y0;y1],'r');p = (b-a);alpha = 0.1; beta = 0.1;hu = [x1-alpha*(p(1)+beta*(p(2)+eps)); x1;x1-alpha*(p(1)-beta*(p(2)+eps))];hv = [y1-alpha*(p(2)-beta*(p(1)+eps)); y1;y1-alpha*(p(2)+beta*(p(1)+eps))];plot(hu(),hv(),'r');% 为了更好的看到电流,将电流放大观察, kiifigure(1);kii=200;b=kii*[I1r,I1i];vectarrow(a,b);b=kii*[-I2r,-I2i];vectarrow(a,b);b=kii*[I2r,I2i];vectarrow(a,b);b=kii*[Imr,Imi];vectarrow(a,b);b=[E2r E2i];vectarrow(a,b);b=[rE1r rE1i];vectarrow(a,b);b=[fai_ampr fai_ampi];vectarrow(a,b);b=[U1r U1i];text(1.5e4,0.2e4,'E2','Fontsize',10);text(-1.75e4,0.2e4,'-E1','Fontsize',10);text(0.2e4,1.0e4,'Φ','Fontsize',10);%text(0.4e4,-0.6e4,'I2','Fontsize',10);text(-1.8e4,-0.4e4,'U1','Fontsize',10);x0 = a(1);y0 = a(2);x1 = b(1);y1 = b(2);plot([x0;x1],[y0;y1],'r');p = (b-a);alpha = 0.1; beta = 0.1;hu = [x1-alpha*(p(1)+beta*(p(2)+eps)); x1;x1-alpha*(p(1)-beta*(p(2)+eps))];hv = [y1-alpha*(p(2)-beta*(p(1)+eps)); y1;y1-alpha*(p(2)+beta*(p(1)+eps))];plot(hu(),hv(),'r');bur1r=ur1r+rE1r;bur1i=ur1i+rE1i;a=[rE1r rE1i];b=[bur1r ,bur1i];vectarrow(a,b);a=[bur1r ,bur1i];b=[(bur1r+ux1r) (bur1i+ux1i)];vectarrow(a,b);a=[U2r U2i];b=[(U2r+ur2r) (U2i+ur2i)];vectarrow(a,b);a=[(U2r+ur2r) (U2i+ur2i)];b=[(U2r+ur2r+ux2r) (U2i+ur2i+ux2i)];vectarrow(a,b)axis([-3.5e4 3.5e4 -3.5*1e4 3.5*1e4]);axis square;grid ontitle('单相变压器的相量图(感性负载)');theta=0;figure(2);% 为了使图形更加直观,放大原副端阻抗三角形beta=8;r1=beta*r1n;r2=beta*r2n;x1=beta*x1n;x2=beta*x2n;Z1=r1+j*x1;Z2=r2+j*x2;u22=k*u2;i22=i2/k;U2=u22;theta_U2=atan2(imag(U2),real(U2));I2=i22*(cos(theta*pi/180)+j*sin(theta*pi/180));theta_I2=atan2(imag(I2),real(I2));E2=U2+I2*Z2;theta_E2=atan2(imag(E2),real(E2));E1=E2;theta_E1=atan2(imag(E1),real(E1));% 为了使图形更加直观,放大Imkim=1.5;fai=kim*E1/(-j*4.44*f*N1);theta_fai=atan2(imag(fai),real(fai));theta_fai1=theta_fai-pi/2 ;Im=beta*(-E1)/(rm+j*xm);theta_Im=atan2(imag(Im),real(Im));I1=Im-I2;theta_I1=atan2(imag(I1),real(I1));U1=-E1+I1*r1+j*I1*x1;theta_U1=atan2(imag(U1),real(U1));ur1=I1*r1;theta_ur1=atan2(imag(ur1),real(ur1));ux1=j*I1*x1;theta_ux1=atan2(imag(ux1),real(ux1));ur2=I2*r2;theta_ur2=atan2(imag(ur2),real(ur2));ux2=j*I2*x2;theta_ux2=atan2(imag(ux2),real(ux2));rot_fai=abs(fai)*i;fai_amp=rot_fai*1e5;fai_ampr=real(fai_amp); fai_ampi=imag(fai_amp);rot_U2=abs(U2)*(cos(theta_U2-theta_fai1)+j*sin(theta_U2-theta_ fai1));U2r=real(rot_U2);U2i=imag(rot_U2);rot_E1=abs(E1)*(cos(theta_E1-theta_fai1)+j*sin(theta_E1-theta_ fai1));rE1r=real(-rot_E1);rE1i=imag(-rot_E1);rot_U1=abs(U1)*(cos(theta_U1-theta_fai1)+j*sin(theta_U1-theta_ fai1));U1r=real(rot_U1);U1i=imag(rot_U1);rot_E2=abs(E2)*(cos(theta_E2-theta_fai1)+j*sin(theta_E2-theta_ fai1));E2r=real(rot_E2);E2i=imag(rot_E2);rot_ur1=abs(ur1)*(cos(theta_ur1-theta_fai1)+j*sin(theta_ur1-th eta_fai1));ur1r=real(rot_ur1);ur1i=imag(rot_ur1);rot_ux1=abs(ux1)*(cos(theta_ux1-theta_fai1)+j*sin(theta_ux1-th eta_fai1));ux1r=real(rot_ux1);ux1i=imag(rot_ux1);rot_ur2=abs(ur2)*(cos(theta_ur2-theta_fai1)+j*sin(theta_ur2-th eta_fai1));ur2r=real(rot_ur2);ur2i=imag(rot_ur2);rot_ux2=abs(ux2)*(cos(theta_ux2-theta_fai1)+j*sin(theta_ux2-th eta_fai1));ux2r=real(rot_ux2);ux2i=imag(rot_ux2);rot_I1=abs(I1)*(cos(theta_I1-theta_fai1)+j*sin(theta_I1-theta_ fai1));I1r=real(rot_I1);I1i=imag(rot_I1);rot_I2=abs(I2)*(cos(theta_I2-theta_fai1)+j*sin(theta_I2-theta_ fai1));I2r=real(rot_I2);I2i=imag(rot_I2);rot_Im=abs(Im)*(cos(theta_Im-theta_fai1)+j*sin(theta_Im-theta_ fai1));Imr=real(rot_Im);Imi=imag(rot_Im);hold ona=[0 0];b=[U2r U2i];text(1.5e4,-0.5e4,'U2','Fontsize',10);x0 = a(1);y0 = a(2);x1 = b(1);y1 = b(2);plot([x0;x1],[y0;y1],'r');p = (b-a);alpha = 0.1; beta = 0.1;hu = [x1-alpha*(p(1)+beta*(p(2)+eps)); x1;x1-alpha*(p(1)-beta*(p(2)+eps))];hv = [y1-alpha*(p(2)-beta*(p(1)+eps)); y1;y1-alpha*(p(2)+beta*(p(1)+eps))];plot(hu(),hv(),'r');% 为了更好的看到电流,将电流放大观察, kiikii=200;b=kii*[I1r,I1i];vectarrow(a,b);b=kii*[-I2r,-I2i];vectarrow(a,b);b=kii*[I2r,I2i];vectarrow(a,b);b=kii*[Imr,Imi];vectarrow(a,b);b=[E2r E2i];vectarrow(a,b);b=[rE1r rE1i];vectarrow(a,b);b=[fai_ampr fai_ampi];vectarrow(a,b);b=[U1r U1i];text(1.5e4,0.2e4,'E2','Fontsize',10);text(-1.75e4,0.2e4,'-E1','Fontsize',10);text(0.2e4,1.0e4,'Φ','Fontsize',10);%text(0.4e4,-0.6e4,'I2','Fontsize',10);text(-1.8e4,-0.4e4,'U1','Fontsize',10);x0 = a(1);y0 = a(2);x1 = b(1);y1 = b(2);plot([x0;x1],[y0;y1],'r');p = (b-a);alpha = 0.1; beta = 0.1;hu = [x1-alpha*(p(1)+beta*(p(2)+eps)); x1;x1-alpha*(p(1)-beta*(p(2)+eps))];hv = [y1-alpha*(p(2)-beta*(p(1)+eps)); y1;y1-alpha*(p(2)+beta*(p(1)+eps))];plot(hu(),hv(),'r');bur1r=ur1r+rE1r;bur1i=ur1i+rE1i;a=[rE1r rE1i];b=[bur1r ,bur1i];vectarrow(a,b);a=[bur1r ,bur1i];b=[(bur1r+ux1r) (bur1i+ux1i)];vectarrow(a,b);a=[U2r U2i];b=[(U2r+ur2r) (U2i+ur2i)];vectarrow(a,b);a=[(U2r+ur2r) (U2i+ur2i)];b=[(U2r+ur2r+ux2r) (U2i+ur2i+ux2i)];vectarrow(a,b)axis([-3.5e4 3.5e4 -3.5*1e4 3.5*1e4]);axis square;grid ontitle('单相变压器的相量图(阻性负载)');theta=30;figure(3);% 为了使图形更加直观,放大原副端阻抗三角形beta=8;r1=beta*r1n;r2=beta*r2n;x1=beta*x1n;x2=beta*x2n;Z1=r1+j*x1;Z2=r2+j*x2;u22=k*u2;i22=i2/k;U2=u22;theta_U2=atan2(imag(U2),real(U2));I2=i22*(cos(theta*pi/180)+j*sin(theta*pi/180));theta_I2=atan2(imag(I2),real(I2));E2=U2+I2*Z2;theta_E2=atan2(imag(E2),real(E2));E1=E2;theta_E1=atan2(imag(E1),real(E1));% 为了使图形更加直观,放大Imkim=1.5;fai=kim*E1/(-j*4.44*f*N1);theta_fai=atan2(imag(fai),real(fai));theta_fai1=theta_fai-pi/2 ;Im=beta*(-E1)/(rm+j*xm);theta_Im=atan2(imag(Im),real(Im));I1=Im-I2;theta_I1=atan2(imag(I1),real(I1));U1=-E1+I1*r1+j*I1*x1;theta_U1=atan2(imag(U1),real(U1));ur1=I1*r1;theta_ur1=atan2(imag(ur1),real(ur1));ux1=j*I1*x1;theta_ux1=atan2(imag(ux1),real(ux1));ur2=I2*r2;theta_ur2=atan2(imag(ur2),real(ur2));ux2=j*I2*x2;theta_ux2=atan2(imag(ux2),real(ux2));rot_fai=abs(fai)*i;fai_amp=rot_fai*1e5;fai_ampr=real(fai_amp); fai_ampi=imag(fai_amp);rot_U2=abs(U2)*(cos(theta_U2-theta_fai1)+j*sin(theta_U2-theta_ fai1));U2r=real(rot_U2);U2i=imag(rot_U2);rot_E1=abs(E1)*(cos(theta_E1-theta_fai1)+j*sin(theta_E1-theta_ fai1));rE1r=real(-rot_E1);rE1i=imag(-rot_E1);rot_U1=abs(U1)*(cos(theta_U1-theta_fai1)+j*sin(theta_U1-theta_ fai1));U1r=real(rot_U1);U1i=imag(rot_U1);rot_E2=abs(E2)*(cos(theta_E2-theta_fai1)+j*sin(theta_E2-theta_ fai1));E2r=real(rot_E2);E2i=imag(rot_E2);rot_ur1=abs(ur1)*(cos(theta_ur1-theta_fai1)+j*sin(theta_ur1-th eta_fai1));ur1r=real(rot_ur1);ur1i=imag(rot_ur1);rot_ux1=abs(ux1)*(cos(theta_ux1-theta_fai1)+j*sin(theta_ux1-th eta_fai1));ux1r=real(rot_ux1);ux1i=imag(rot_ux1);rot_ur2=abs(ur2)*(cos(theta_ur2-theta_fai1)+j*sin(theta_ur2-th eta_fai1));ur2r=real(rot_ur2);ur2i=imag(rot_ur2);rot_ux2=abs(ux2)*(cos(theta_ux2-theta_fai1)+j*sin(theta_ux2-th eta_fai1));ux2r=real(rot_ux2);ux2i=imag(rot_ux2);rot_I1=abs(I1)*(cos(theta_I1-theta_fai1)+j*sin(theta_I1-theta_ fai1));I1r=real(rot_I1);I1i=imag(rot_I1);rot_I2=abs(I2)*(cos(theta_I2-theta_fai1)+j*sin(theta_I2-theta_ fai1));I2r=real(rot_I2);I2i=imag(rot_I2);rot_Im=abs(Im)*(cos(theta_Im-theta_fai1)+j*sin(theta_Im-theta_ fai1));Imr=real(rot_Im);Imi=imag(rot_Im);hold ona=[0 0];b=[U2r U2i];text(1.5e4,-0.5e4,'U2','Fontsize',10);x0 = a(1);y0 = a(2);x1 = b(1);y1 = b(2);plot([x0;x1],[y0;y1],'r');p = (b-a);alpha = 0.1; beta = 0.1;hu = [x1-alpha*(p(1)+beta*(p(2)+eps)); x1;x1-alpha*(p(1)-beta*(p(2)+eps))];hv = [y1-alpha*(p(2)-beta*(p(1)+eps)); y1;y1-alpha*(p(2)+beta*(p(1)+eps))];plot(hu(),hv(),'r');% 为了更好的看到电流,将电流放大观察, kiikii=200;b=kii*[I1r,I1i];vectarrow(a,b);b=kii*[-I2r,-I2i];vectarrow(a,b);b=kii*[I2r,I2i];vectarrow(a,b);b=kii*[Imr,Imi];vectarrow(a,b);b=[E2r E2i];vectarrow(a,b);b=[rE1r rE1i];vectarrow(a,b);b=[fai_ampr fai_ampi];vectarrow(a,b);b=[U1r U1i];text(1.5e4,0.2e4,'E2','Fontsize',10);text(-1.75e4,0.2e4,'-E1','Fontsize',10);text(0.2e4,1.0e4,'Φ','Fontsize',10);%text(0.4e4,-0.6e4,'I2','Fontsize',10);text(-1.8e4,-0.4e4,'U1','Fontsize',10);x0 = a(1);y0 = a(2);x1 = b(1);y1 = b(2);plot([x0;x1],[y0;y1],'r');p = (b-a);alpha = 0.1; beta = 0.1;hu = [x1-alpha*(p(1)+beta*(p(2)+eps)); x1;x1-alpha*(p(1)-beta*(p(2)+eps))];hv = [y1-alpha*(p(2)-beta*(p(1)+eps)); y1;y1-alpha*(p(2)+beta*(p(1)+eps))];plot(hu(),hv(),'r');bur1r=ur1r+rE1r;bur1i=ur1i+rE1i;a=[rE1r rE1i];b=[bur1r ,bur1i];vectarrow(a,b);a=[bur1r ,bur1i];b=[(bur1r+ux1r) (bur1i+ux1i)];vectarrow(a,b);a=[U2r U2i];b=[(U2r+ur2r) (U2i+ur2i)];vectarrow(a,b);a=[(U2r+ur2r) (U2i+ur2i)];b=[(U2r+ur2r+ux2r) (U2i+ur2i+ux2i)];vectarrow(a,b) axis([-3.5e4 3.5e4 -3.5*1e4 3.5*1e4]);axis square;grid ontitle('单相变压器的相量图(容性负载)');。