数据结构实验五——图的建立与搜索及迪杰斯特拉算法求单源最短路径
迪杰斯特拉算法和Floyd算法实现无向图的最短路径的计算和求解

摘要本次课程设计主要核心为利用迪杰斯特拉算法和Floyd算法实现无向图的最短路径的计算和求解。
要求理解算法的具体实现流程、学会正确使用该算法求解实际问题。
本次课程设计具体内容是:通过对两个算法的理解与应用来比较两个算法的优缺点。
本程序要求结合最短路算法以及相应的数据结构的定义和使用,实现一个最短路径算法的简单应用。
本课程设计是对书本知识的简单应用,以此培养大家用书本知识解决实际问题的能力;培养实际工作所需要的动手能力;培养以科学理论和工程上能力的技术,规范地开发大型、复杂、高质量的应用软件和系统软件。
关键字:迪杰斯特拉算法,Floyd算法,最短路径,算法设计,数据结构目录摘要 --------------------------------------------------------------- 1一、Dijkstra算法--------------------------------------------------- 31.1定义概览 ---------------------------------------------------- 31.2算法描述 ---------------------------------------------------- 31.2.1算法思想:--------------------------------------------- 31.1.2算法步骤----------------------------------------------- 31.3算法代码实现 ------------------------------------------------ 41.4算法实例 ---------------------------------------------------- 5二、Floyd算法------------------------------------------------------ 72.1定义概览 ---------------------------------------------------- 72.2算法描述 ---------------------------------------------------- 72.2.1算法思想原理------------------------------------------- 72.3算法代码实现 ----------------------------------------------- 10三、结论 ---------------------------------------------------------- 11四、参考文献 ------------------------------------------------------ 12一、Dijkstra算法1.1定义概览Dijkstra(迪杰斯特拉)算法是典型的单源最短路径算法,用于计算一个节点到其他所有节点的最短路径。
迪杰斯特拉算法求最短路径表格

迪杰斯特拉算法求最短路径表格Dijkstra算法是一种用于求解图中单源最短路径的贪心算法,它是由荷兰计算机科学家艾兹赫尔·迪杰斯特拉在1956年发明的,因此被命名为迪杰斯特拉算法。
算法思路:Dijkstra算法将图中的每个顶点分别标记为已知最短路径的顶点或未知最短路径的顶点。
在每次循环中,从未知最短路径的顶点中选择一个顶点,加入已知最短路径的顶点中,并更新所有其邻居的距离值。
具体步骤:1. 创建一个一维数组dist, 记录源点到其他点的距离2. 创建一个一维数组visited, 标记顶点是否已被加入已知最短路径的集合S3. 将源点加入已知最短路径的集合S中,并将dist数组的源点位置赋为04. 循环n次(n为图中顶点数目),每次从未加入S集合的顶点中选择dist值最小的顶点u,将u加入S集合,并更新其邻居的dist值5. 循环结束后,dist数组中保存的即为源点到各个顶点的最短路路径。
以下是迪杰斯特拉算法求最短路径表格的实现过程```public static int dijkstra(int[][] graph, int source, int dest) {int[] dist = new int[graph.length]; // 表示源点到各个顶点的最短距离boolean[] visited = new boolean[graph.length]; // 标记当前顶点是否加入已知最短路径的集合Sfor (int i = 0; i < graph.length; i++) {dist[i] = Integer.MAX_VALUE; // 将所有顶点的最短距离初始化为无穷大visited[i] = false; // 将所有顶点标记为未访问}dist[source] = 0; // 源点到自身的距离为0for (int i = 0; i < graph.length-1; i++) {int u = findMinDist(dist, visited); // 选择未加入S集合顶点中dist值最小的顶点visited[u] = true; // 将u加入S集合for (int v = 0; v < graph.length; v++) { //更新u的邻居v的dist值if (!visited[v] && graph[u][v] != 0 && dist[u] != Integer.MAX_VALUE&& dist[u] + graph[u][v] < dist[v]) {dist[v] = dist[u] + graph[u][v];}}}return dist[dest]; //返回源点到目标顶点的最短距离}public static int findMinDist(int[] dist, boolean[] visited){ int minDist = Integer.MAX_VALUE;int minIndex = -1;for (int i = 0; i < dist.length; i++) {if(!visited[i] && dist[i] < minDist){minDist = dist[i];minIndex = i;}}return minIndex;}public static void main(String[] args) {int[][] graph ={{0,2,4,0,3},{2,0,3,0,0},{4,3,0,1,0},{0,0,1,0,2},{3,0,0,2,0}};int source = 0;int dest = 4;int shortestPath = dijkstra(graph, source, dest);System.out.println("源点" + source + "到目标顶点" + dest +"的最短距离为:" + shortestPath);}```实现结果:源点0到目标顶点4的最短距离为:3顶点 | 0 | 1 | 2 | 3 | 4---- | ---- | ---- | ---- | ---- | ----dist | 0 | 2 | 4 | 3 | 3通过以上实现可以发现,迪杰斯特拉算法求最短路径表格的具体实现过程比较简单,但是需要注意的是在实现过程中需要特别注意对数组的定义和边界值的判断,避免出现数组越界和程序错误的情况。
Dijkstra算法求最短路径

在交通网络中,常常会提出许多这样的问题:两地之间是否有路相通?在有多条通路的情况下,哪一条最近?哪一条花费最少等。
交通网络可以用带权图表示,图中顶点表示域镇,边表示两城之间的道路,边上权值可表示两城镇间的距离,交通费用或途中所需的时间等。
以上提出的问题就是带权图中求最短路径的问题,即求两个顶点间长度最短的路径。
最短路径问题的提法很多。
在这里仅讨论单源最短路径问题:即已知有向图(带权),我们希望找出从某个源点S∈V到G中其余各顶点的最短路径。
例如:下图(有向图G14),假定以v1为源点,则其它各顶点的最短路径如下表所示:图G14从有向图可看出,顶点v1到v4的路径有3条:(v1,v2,v4),(v1,v4),(v1,v3,v2,v4),其路径长度分别为:15,20和10。
因此v1到v4的最短路径为(v1,v3,v2,v4 )。
为了叙述方便,我们把路径上的开始点称为源点,路径的最后一个顶点为终点。
那么,如何求得给定有向图的单源最短路径呢?迪杰斯特拉(Dijkstra)提出按路径长度递增产生诸顶点的最短路径算法,称之为迪杰斯特拉算法。
迪杰斯特拉算法求最短路径的实现思想是:设有向图G=(V,E),其中,V={0,2,…,n-1},cost是表示G的邻接矩阵,G.arcs [i][j] .adj 表示有向边<i,j>的权。
若不存在有向边<i,j>,则G.arcs [i][j] .adj 的权为无穷大(这里取值为32767)。
设S是一个集合,其中的每个元素表示一个顶点,从源点到这些顶点的最短距离已经求出。
设顶点v0为源点,集合S的初态只包含顶点v0。
数组D记录从源点到其他各顶点当前的最短距离,其初值为D[i]= G.arcs[v0][i].adj ,i=1,…,n-1。
从S之外的顶点集合V-S 中选出一个顶点w,使D[w]的值最小。
于是从源点到达w只通过S 中的顶点,把w加入集合S中调整D中记录的从源点到V-S中每个顶点v的距离:从原来的D[v] 和D[w]+ G.arcs [w][v] .adj中选择较小的值作为新的D[v]。
迪杰斯特拉算法步骤

迪杰斯特拉算法步骤简介迪杰斯特拉算法(Dijkstra’s algorithm)是一种用于在加权图中找到最短路径的算法。
它由荷兰计算机科学家艾兹赫尔·迪杰斯特拉于1956年提出,并被广泛应用于网络路由和地图导航等领域。
迪杰斯特拉算法的基本思想是从一个起点到其他所有顶点的最短路径逐步扩展,直到找到目标顶点的最短路径为止。
算法步骤迪杰斯特拉算法的步骤如下:步骤一:初始化1.创建一个空的最短路径表,用于保存每个顶点到起点的最短路径长度。
2.将起点的最短路径长度设置为0,将其他顶点的最短路径长度设置为无穷大(表示尚未计算出最短路径)。
3.创建一个空的已访问集合,用于保存已经计算过最短路径的顶点。
步骤二:选择最短路径顶点1.从起点开始,选择一个未访问的顶点,其最短路径长度最小。
2.将该顶点标记为已访问。
步骤三:更新最短路径1.对于当前选择的顶点,遍历其所有邻接顶点。
2.如果通过当前选择的顶点到达邻接顶点的路径长度小于该邻接顶点的最短路径长度,则更新该邻接顶点的最短路径长度。
步骤四:重复步骤二和步骤三1.重复步骤二和步骤三,直到所有顶点都被访问过或者找到目标顶点的最短路径。
步骤五:输出最短路径1.根据最短路径表,可以得到起点到每个顶点的最短路径长度。
2.根据最短路径表和邻接矩阵,可以还原出起点到每个顶点的最短路径。
实例演示为了更好地理解迪杰斯特拉算法的步骤,我们以一个简单的示例来进行演示。
假设有以下加权无向图:A/ \2 3/ \B---4----C\ 2 /\ /1 5\ /D我们的目标是求取顶点A到其他所有顶点的最短路径。
1.初始化最短路径表和已访问集合:–最短路径表:A(0), B(∞), C(∞), D(∞)–已访问集合:空2.选择最短路径顶点:起始顶点A的最短路径长度为0,因此选择A作为当前最短路径顶点。
3.更新最短路径:–从A出发,到达B的路径长度为2,小于B当前的最短路径长度(正无穷),因此更新B的最短路径长度为2。
数据结构最短路径算法
数据结构最短路径算法数据结构是计算机科学中非常重要的概念之一,它涉及到了组织和管理数据的方法和原则。
数据结构为我们提供了一种组织和存储数据的方式,以便于在算法中使用和操作数据。
在实际的计算机应用中,我们经常需要在图、网络、地图等复杂结构中找到最短路径。
因此,设计高效的最短路径算法是数据结构中一个重要的问题。
最短路径算法是一种计算从一个节点到另一个节点最短路径的方法。
最短路径算法的应用非常广泛,例如,在网络路由中,一个路由器需要找到从源节点到目标节点的最短路径,以便将数据包转发到目标节点;在地图导航中,我们需要找到从出发地到目的地的最短路径,以便为用户提供最佳的导航方案。
最短路径算法有许多不同的实现方法,每种方法都基于不同的数据结构和算法原理。
下面介绍几种常见的最短路径算法以及它们使用的数据结构。
1. Dijkstra算法:Dijkstra算法是最常用的最短路径算法之一、它基于图的广度优先(BFS)和贪心算法的思想,用于计算一个节点到所有其他节点的最短路径。
Dijkstra算法使用优先队列数据结构来维护每个节点的最短路径估计值,并根据估计值进行节点的选择和更新。
该算法的时间复杂度为O((V+E)logV),其中V是节点数量,E是边数量。
2. Bellman-Ford算法:Bellman-Ford算法是另一种常见的最短路径算法。
它基于图的深度优先(DFS)和动态规划的思想,可以处理有负权边的图。
Bellman-Ford算法使用一个一维数组来保存每个节点的最短路径估计值,并使用松弛(relax)操作来更新节点的最短路径。
它的时间复杂度为O(VE),其中V是节点数量,E是边数量。
3. Floyd-Warshall算法:Floyd-Warshall算法是一种用于计算所有节点对之间最短路径的算法。
它基于动态规划的思想,适用于有向图和无向图的最短路径问题。
Floyd-Warshall算法使用一个二维数组来保存任意两个节点之间的最短路径,并通过计算中间节点,逐步更新最短路径。
dijkstra最短路径算法
图解迪杰斯特拉(Dijkstra)最短路径算法目录前言一、最短路径的概念及应用二、Dijkstra迪杰斯特拉1.什么是Dijkstra2.逻辑实现总结前言无论是什么程序都要和数据打交道,一个好的程序员会选择更优的数据结构来更好的解决问题,因此数据结构的重要性不言而喻。
数据结构的学习本质上是让我们能见到很多前辈在解决一些要求时间和空间的难点问题上设计出的一系列解决方法,我们可以在今后借鉴这些方法,也可以根据这些方法在遇到具体的新问题时提出自己的解决方法。
(所以各种定义等字眼就不用过度深究啦,每个人的表达方式不一样而已),在此以下的所有代码都是仅供参考,并不是唯一的答案,只要逻辑上能行的通,写出来的代码能达到相同的结果,并且在复杂度上差不多,就行了。
一、最短路径的概念及应用在介绍最短路径之前我们首先要明白两个概念:什么是源点,什么是终点?在一条路径中,起始的第一个节点叫做源点;终点:在一条路径中,最后一个的节点叫做终点;注意!源点和终点都只是相对于一条路径而言,每一条路径都会有相同或者不相同的源点和终点。
而最短路径这个词不用过多解释,就是其字面意思:在图中,对于非带权无向图而言,从源点到终点边最少的路径(也就是BFS广度优先的方法);而对于带权图而言,从源点到终点权值之和最少的路径叫最短路径;最短路径应用:道路规划;我们最关心的就是如何用代码去实现寻找最短路径,通过实现最短路径有两种算法:Dijkstra迪杰斯特拉算法和Floyd弗洛伊德算法,接下来我会详细讲解Dijkstra迪杰斯特拉算法;二、Dijkstra迪杰斯特拉1.什么是DijkstraDijkstra迪杰斯特拉是一种处理单源点的最短路径算法,就是说求从某一个节点到其他所有节点的最短路径就是Dijkstra;2.逻辑实现在Dijkstra中,我们需要引入一个辅助变量D(遇到解决不了的问题就加变量[_doge]),这个D我们把它设置为数组,数组里每一个数据表示当前所找到的从源点V开始到每一个节点Vi的最短路径长度,如果V到Vi有弧,那么就是每一个数据存储的就是弧的权值之和,否则就是无穷大;我们还需要两个数组P和Final,它们分别表示:源点到Vi的走过的路径向量,和当前已经求得的从源点到Vi的最短路径(也就是作为一个标记表示该节点已经加入到最短路径中了);那么对于如下这个带权无向图而言,我们应该如何去找到从V0到V8的最短路径呢;在上文中我们已经描述过了,在从V0到V8的这一条最短路径中,V0自然是源点,而V8自然是终点;于是我根据上文的描述具现化出如下的表格;在辅助向量D中,与源点V0有边的就填入边的权值,没边就是无穷大;构建了D、P和Final,那么我们要开始遍历V0,找V0的所有边中权值最短的的边,把它在D、P、Final中更新;具体是什么意识呢?在上述带权无向图中,我们可以得到与源点有关的边有(V0,V1)和(V0,V2),它们的权值分别是1和5,那么我们要找到的权值最短的的边,就是权值为1 的(V0,V1),所以把Final[1]置1,表示这个边已经加入到最短路径之中了;而原本从V0到V2的距离是5,现在找到了一条更短的从V0 -> V1 -> V2距离为4,所以D[2]更新为4,P[2]更新为1,表示源点到V2经过了V1的中转;继续遍历,找到从V0出发,路径最短并且final的值为0的节点。
迪杰斯特拉算法计算最短路径

利用Dijkstra算法计算最短路径摘要福格环游地球问题是一个十分典型的最短路径求解问题,题设给出了当时世界上主要交通网络图及交通通畅的城市之间来往所需时长,并限定了福格的出行方向(福格选择的是往东走),给出起止地点后要求找出福格环游世界天数最短的最佳路径。
我们认为,这个问题的实质在于最短路径的求解和优化。
我们对比图论中的多种最短路径算法,决定利用Dijkstra算法解决这个问题。
由于Dijkstra算法要求输入图G的关联矩阵,且图G为二维赋权图,而题中给出的地图可看成是三维环状地图,因此,我们对题设地图做相关处理,将其从起点处“切断”并展开为二维图,然后根据此图建立关联矩阵。
同时,我们考虑到最短路径可能会与切断线有交点,在切断线以西找出若干地点一分为二,修改关联矩阵。
对于题目中缺失的两处数据,本文将以当时的交通数据为基础,经过合理的数据处理,结合Google Earth测距软件与题目数据的合理类比,补充缺失数据,完成关联矩阵。
得到关联矩阵后,我们分别以伦敦、纽约和上海作为起点,调整关联矩阵起点和终点,用matlab编程进行求解得到最短环游时间和最短路径,进而判断出所选择的路径是否能让他赢得赌注。
根据我们的求解结果,在这三个城市,福格均能在80天内环游地球,赢得赌注。
本文进一步对此种算法的优缺点、灵敏度与推广性进行了分析,同时初步提出了两种优化方法。
关键词:最短路径算法 dijkstra算法算法优化一、问题重述儒勒•凡尔纳的著名小说《环游世界80天》中,英国绅士福格在伦敦与人打赌能够在80天内环游世界,这在当时的1872年是一个了不起的壮举。
当时最快的旅行方式是火车和轮船,然而世界上大部分地区还是靠马车、大象、驴子或者步行来旅行。
下面是一个从伦敦环游世界不同路线的交通网络图,福格选择的是往东走,每段路线所需要的天数显示在图上(见附录一),旅行的时间基于1872年能采用的旅行方式以及距离。
我们将解决以下问题:1.我们将设计一个算法为福格选择一条最佳路径,即环游世界天数最短,并判断所选择的路径是否能让他赢得赌注。
迪杰斯特拉算法求单源最短路径
迪杰斯特拉算法是一种用于求解单源最短路径的经典算法,它被广泛应用于网络路由、电信领域以及各种其他实际问题中。
本文将从以下几个方面详细介绍迪杰斯特拉算法的原理、实现以及应用,以帮助读者深入理解并掌握该算法。
一、迪杰斯特拉算法的原理迪杰斯特拉算法的核心思想是通过逐步确定从起点到其他顶点的最短路径来求解单源最短路径问题。
其具体原理包括以下几个步骤:1. 初始化:将起点到所有其他顶点的距离初始化为无穷大,起点到自身的距离为0,并建立一个空的集合S来存放已确定最短路径的顶点。
2. 选择最近顶点:从未确定最短路径的顶点中选择距离起点最近的顶点u加入集合S。
3. 更新距离:对于顶点集合V-S中的每个顶点v,如果通过顶点u可以找到一条比当前最短路径更短的路径,则更新起点到顶点v的距离。
4. 重复步骤2和步骤3,直到集合S包含所有顶点。
通过上述步骤,迪杰斯特拉算法可以求解出起点到图中所有其他顶点的最短路径。
二、迪杰斯特拉算法的实现迪杰斯特拉算法可以通过多种数据结构来实现,其中最常见的是使用优先队列来存储未确定最短路径的顶点,并通过松弛操作来更新顶点的距离。
下面将介绍一种基于优先队列的迪杰斯特拉算法实现方法:1. 初始化距离数组dist[],其中dist[i]表示起点到顶点i的最短距离,将所有顶点初始化为无穷大,起点初始化为0。
2. 将起点加入优先队列,并将其距离更新为0。
3. 循环执行以下步骤直到优先队列为空:(1)从优先队列中取出距离起点最近的顶点u。
(2)遍历顶点u的所有邻接顶点v,对于每个邻接顶点v,如果通过顶点u可以找到一条更短的路径,则更新顶点v的距离,并将其加入优先队列。
通过上述实现,我们可以得到起点到所有其他顶点的最短路径。
三、迪杰斯特拉算法的应用迪杰斯特拉算法在实际应用中有着广泛的应用场景,其中最典型的应用包括网络路由、电信领域以及地图路径规划等。
1. 网络路由:在计算机网络中,迪杰斯特拉算法被用于寻找最短路径,以确保数据包以最短的路径到达目的地,提高网络传输效率。
Dijkstra算法求解单源最短路径问题
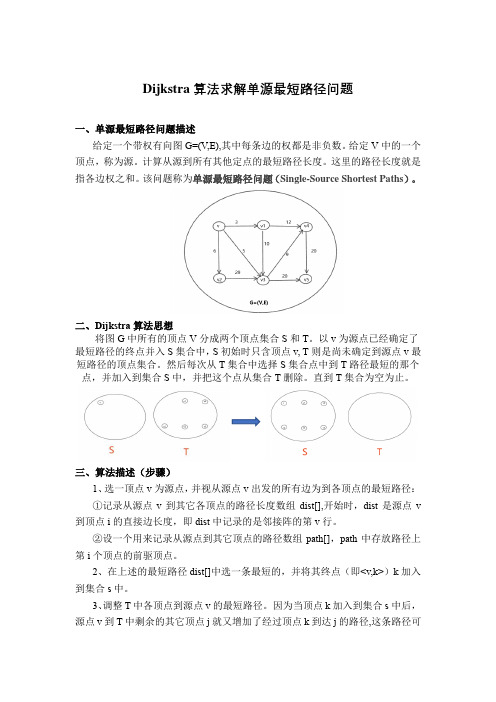
Dijkstra算法求解单源最短路径问题一、单源最短路径问题描述给定一个带权有向图G=(V,E),其中每条边的权都是非负数。
给定V中的一个顶点,称为源。
计算从源到所有其他定点的最短路径长度。
这里的路径长度就是指各边权之和。
该问题称为单源最短路径问题(Single-Source Shortest Paths)。
二、Dijkstra算法思想将图G中所有的顶点V分成两个顶点集合S和T。
以v为源点已经确定了最短路径的终点并入S集合中,S初始时只含顶点v, T则是尚未确定到源点v最短路径的顶点集合。
然后每次从T集合中选择S集合点中到T路径最短的那个点,并加入到集合S中,并把这个点从集合T删除。
直到T集合为空为止。
三、算法描述(步骤)1、选一顶点v为源点,并视从源点v出发的所有边为到各顶点的最短路径:①记录从源点v到其它各顶点的路径长度数组dist[],开始时,dist是源点v到顶点i的直接边长度,即dist中记录的是邻接阵的第v行。
②设一个用来记录从源点到其它顶点的路径数组path[],path中存放路径上第i个顶点的前驱顶点。
2、在上述的最短路径dist[]中选一条最短的,并将其终点(即<v,k>)k加入到集合s中。
3、调整T中各顶点到源点v的最短路径。
因为当顶点k加入到集合s中后,源点v到T中剩余的其它顶点j就又增加了经过顶点k到达j的路径,这条路径可能要比源点v到j原来的最短的还要短。
调整方法是比较dist[k]+g[k,j]与dist[j],取其中的较小者。
4、再选出一个到源点v路径长度最小的顶点k,从T中删去后加入S中,再回去到第三步,如此重复,直到集合S中的包含图G的所有顶点。
四、算法实现(数据结构)1、算法实现输入:一个大于1的整数n.输出:●一个随机生成的有向图G=(V,E),对于每一条边,有一个非负数字c(u,v)与之相关。
●对于每个顶点v∈V,得到从v0到v的最短路径的长度。
图论中的最长路径问题与最短路径问题
图论中的最长路径问题与最短路径问题在图论中,最长路径问题和最短路径问题是两个重要且常见的问题。
最长路径问题旨在寻找图中两个顶点之间的最长路径,而最短路径问题则是寻找图中两个顶点之间的最短路径。
本文将分别介绍这两个问题,并讨论它们的应用和解决方法。
首先,我们来讨论最长路径问题。
最长路径问题在实际应用中有着广泛的应用,例如交通规划、通信网络以及电路设计等。
在图中,路径是由一系列顶点连接而成的。
最长路径问题的目标是找到两个顶点之间的路径中具有最大权值的路径。
最长路径问题可以通过深度优先搜索(DFS)算法来解决。
深度优先搜索是一种用于遍历或搜索图的算法,它从一个顶点开始,沿着路径尽可能地往下搜索,直到达到无法再继续搜索的顶点为止。
在深度优先搜索的过程中,我们可以记录下每个顶点的最大路径长度,最终找到两个顶点之间的最长路径。
接下来,我们将讨论最短路径问题。
最短路径问题在实际应用中同样具有重要性,例如导航系统、网络路由以及货物运输等。
最短路径问题的目标是找到两个顶点之间的路径中具有最小权值之和的路径。
最短路径问题可以通过使用迪杰斯特拉算法(Dijkstra algorithm)来解决。
迪杰斯特拉算法是一种用于解决单源最短路径问题的贪婪算法。
它从一个起始顶点开始,逐步地计算到达其他顶点的最短路径长度。
通过不断更新路径长度,并选择当前路径长度最小的顶点进行下一步计算,最终可以确定出起始顶点到其他顶点的最短路径。
最长路径问题和最短路径问题在实际应用中有着广泛的应用。
最长路径问题可以帮助我们优化电路设计,提高通信网络的稳定性,也可以提供交通规划的参考。
而最短路径问题可以帮助我们制定最优的导航路线,提高货物运输的效率,也可以优化网络路由的选择。
综上所述,最长路径问题和最短路径问题是图论中两个重要的问题。
通过深度优先搜索和迪杰斯特拉算法,我们可以解决这两个问题,并在实际应用中获得丰富的应用场景。
无论是最长路径问题还是最短路径问题,它们都展示了图论在实际生活中的重要性和广泛的应用前景。
迪杰斯特拉算法求最短路径表格

迪杰斯特拉算法求最短路径表格迪杰斯特拉算法(Dijkstra's algorithm)是一种用于寻找加权图中从单个源节点到所有其他节点的最短路径的算法。
它采用一种贪婪的策略,通过逐步扩展起点到终点的路径来找到最短路径。
本文将详细介绍迪杰斯特拉算法,并给出一个完整的最短路径表格。
算法描述:1.创建一个包含所有节点的集合,并初始化所有节点的距离为无穷大(除了起点为0)。
2.按照起点到各个节点的距离逐步更新节点的距离,直到找到所有节点的最短路径为止。
具体步骤如下:a.选取一个未加入集合的距离最小的节点,将其加入集合。
b.对于与该节点相邻的所有节点,更新它们的距离。
c.如果更新后的距离小于原来的距离,则更新节点的距离。
3.重复步骤2,直到所有节点都加入集合为止。
下面我们通过一个具体的例子来演示迪杰斯特拉算法求最短路径表格。
假设有如下的有向图:```+--++--+2+--+A,---->,B,--4->,D+--++--+,+--+v+--+3,+--+C,--->,+--++--+```图中每条边上的数字表示该边的权重。
首先,我们创建一个包含所有节点的集合,并初始化所有节点的距离为无穷大,起点A的距离为0。
节点,距离---,---A,0B ,infC ,infD ,infE ,inf然后选择起点A的邻居节点B和C中距离最小的节点B,将其加入集合。
节点,距离A,0B,2C ,infD ,infE ,inf接下来,更新节点B的邻居节点D和E的距离。
由于A到B的距离是2,加上B到D的距离为4,得到A到D的距离为6、同理,A到E的距离为5节点,距离---,---A,0B,2C ,infD,6E,5再次选择集合中距离最小的节点B,更新其邻居节点D和E的距离。
节点,距离---,---B,2C,11D,6E,5继续重复上述步骤,直到所有节点都加入集合。
节点,距离---,---A,0B,2C,11D,6E,5通过上述步骤,我们得到了从起点A到所有其他节点的最短路径距离。
求解单源最短路径问题的算法
求解单源最短路径问题的算法单源最短路径问题是指从图中的一个顶点到其他所有顶点的最短路径的问题。
下面将详细介绍两种经典的求解该问题的算法:Dijkstra算法和Bellman-Ford 算法。
1. Dijkstra算法:- 初始化:将源顶点的距离初始化为0,其他顶点的距离初始化为无穷大。
创建一个集合S,记录已经确定最短路径的顶点。
- 重复以下步骤,直到集合S包含所有顶点:- 从未确定最短路径的顶点中选择距离源顶点最近的顶点u,并将其加入集合S。
- 对于与u相邻的顶点v,更新其距离为:min(distance[v], distance[u] + weight(u, v)),其中weight(u, v)表示边(u, v)的权值。
- 最终得到源顶点到图中所有其他顶点的最短路径。
2. Bellman-Ford算法:- 初始化:将源顶点的距离初始化为0,其他顶点的距离初始化为无穷大。
- 重复以下步骤,执行V-1次(V为顶点数):- 遍历图中的所有边,对于每条边(u, v),更新顶点v的距离为:min(distance[v], distance[u] + weight(u, v))。
- 检查是否存在负权回路:再次遍历所有边,如果对于边(u, v),发现distance[v] > distance[u] + weight(u, v),则说明存在从源顶点可达的负权回路,无法确定最短路径;否则,最短路径已经确定。
Dijkstra算法适用于无负权边且图稠密的情况,时间复杂度为O(V^2),也可以通过最小堆优化(时间复杂度为O((V+E)logV))。
Bellman-Ford算法适用于有负权边或存在负权回路的情况,时间复杂度为O(VE)。
需要注意的是,以上算法都是解决单源最短路径问题的经典算法,也可以使用其他如SPFA、Floyd-Warshall等算法求解,选择合适的算法应根据具体问题的要求和图的特性进行评估和选择。
迪杰斯特拉算法求最短路径图解
迪杰斯特拉算法求最短路径图解
迪杰斯特拉算法是在用运筹学中解决路径搜索问题时候非常有用的一种算法。
它适用于求解从一个点到其他所有点的最短路径。
这种算法主要应用于交通网络,求解旅游问题,处理穿越桥梁或隧道的情况等等。
迪杰斯特拉算法的含义就是“最短路径”。
这种算法比较常见的一种,因为它
可以用于解决上述类型的问题,也能够给出即时的答案。
需要说明的是,运用迪杰斯特拉算法求解最短路径,需要满足一定的条件:必须满足图的邻接关系,并且确定用于求最短路径的起点和终点。
迪杰斯特拉的步骤可以分为四步:
第一步:先从所有节点中选择一个起始节点,找出该节点与其他节点之间的最
短路径;
第二步:选择一个未被访问的节点,计算从起始节点到该节点的最短路径长度;
第三步:在剩余节点中重复步骤二直至起始节点与所有节点均被访问;
第四步:当所有节点都被访问后,根据记录的信息,选择起始节点通往其他节
点的最短路径。
一旦经过这四步完成了最短路径的搜索,就可以使用迪杰斯特拉算法解决最短
路径问题了。
这种算法的特点在于它的有效性,准确性和便捷性,可以找出最短路径的最优解来解决问题,并且很容易实施。
解决最短路径问题时,使用该算法的一大优势在于可以考虑到不同的费用,这也就意味着可以计算具有很高效率的最短路径。
离散数学中的图的最短路径与迪杰斯特拉算法
在离散数学中,图论是一个重要的研究领域,涉及到许多与图有关的概念和算法。
其中,最短路径和迪杰斯特拉算法被广泛应用于图中节点之间最短路径的计算与查找。
首先,我们来了解一下最短路径的概念。
在一个有向或无向图中,最短路径是指从起始节点到目标节点的路径中,具有最小权重的路径。
权重可以表示为两个节点之间的距离、成本或代价等。
在现实生活中,最短路径问题可以应用到许多场景中,比如寻找两个城市之间的最短路线或者确定网络中两台计算机之间的最短连接。
要计算图中的最短路径,其中一种经典的算法是迪杰斯特拉算法。
迪杰斯特拉算法是一种贪心算法,通过逐步更新节点的距离值来找到最短路径。
它的基本思想是从起始节点开始,首先将起始节点的距离值设置为0,然后将所有其他节点的距离值设置为无穷大。
接下来,算法根据每条边的权重更新节点的距离值,直到找到目标节点或者遍历完所有节点为止。
具体来说,迪杰斯特拉算法可以分为以下几个步骤:1.初始化:将起始节点的距离值设为0,将其他节点的距离值设为无穷大。
2.遍历:从起始节点开始,逐一考察与当前节点相邻的节点。
3.更新距离:对于每一个相邻节点,计算通过当前节点到达该节点的距离,并将其与该节点存储的当前最短距离进行比较。
如果通过当前节点的路径更短,就更新该节点的最短距离值。
4.标记节点:在遍历的过程中,通过节点之间的最短路径更新,我们可以逐渐标记节点为“已访问”,确保每一个节点的最短路径都已计算。
5.终止条件:当遍历完成或者找到目标节点时,算法终止。
迪杰斯特拉算法的时间复杂度为O(N^2),其中N是图中的节点数量。
尽管在大规模图中可能会出现效率问题,但对于中小规模的图,该算法具有较高的实用价值。
总结来说,离散数学中的图的最短路径与迪杰斯特拉算法密不可分。
通过迪杰斯特拉算法,我们可以在图中找到从起始节点到目标节点的最短路径。
该方法的基本思想是贪心的,通过逐步更新节点的距离值,从而逐渐找到最短路径。
无论是用于寻找城市间最短路线还是网络中最短连接,这个算法都具有广泛的应用前景。
迪杰斯特拉算法c语言从某个源点到其余各顶点的最短路径

迪杰斯特拉算法c语言从某个源点到其余各顶点的最短路径1. 引言1.1 概述迪杰斯特拉算法是一种用于解决带权有向图中单源最短路径问题的经典算法。
该算法通过不断更新顶点之间的距离估计值,找到从给定源点到达其他所有顶点的最短路径。
在实际应用中,迪杰斯特拉算法被广泛应用于路由选择、通信网络以及交通运输等领域。
1.2 文章结构本文将围绕迪杰斯特拉算法展开讨论,并以C语言作为实现工具。
我们首先介绍了迪杰斯特拉算法的概述,包括其原理、应用场景和优势。
接着详细介绍了如何使用C语言来实现迪杰斯特拉算法,并分析了代码的数据结构设计、算法实现步骤以及示例代码解析。
随后,我们进行了示例测试与结果分析,展示了如何根据创建的图和设定的源点执行迪杰斯特拉算法并求解最短路径。
最后,我们对整个文章进行总结讨论,并展望了迪杰斯特拉算法在未来的应用前景,并提出硬件资源限制下的改进策略。
1.3 目的本文旨在深入介绍迪杰斯特拉算法,并通过C语言代码实现的方式,帮助读者理解和掌握该算法的原理和实际应用。
通过对算法原理、数据结构设计以及示例测试与结果分析的详细讲解,我们旨在提供一个全面且易于理解的指导,使读者能够更好地应用迪杰斯特拉算法解决自己所面临的问题,并为进一步优化和改进迪杰斯特拉算法提供思路和启示。
2. 迪杰斯特拉算法概述2.1 算法原理迪杰斯特拉算法是一种用于解决带权有向图中单源最短路径问题的经典算法。
其基本思想是通过不断更新到达各顶点的最短路径长度,逐步确定源点到其他所有顶点的最短路径。
具体实现过程如下:1. 创建两个集合S和V-S,其中S表示已确定最短路径的顶点集合,V-S表示尚未确定最短路径的顶点集合。
2. 初始化源点到所有其他顶点的距离为无穷大,而源点到自身的距离为0。
3. 选择一个还未确定最短路径的顶点v,并且使得源点到v的距离为当前已知的最小值。
4. 标记该顶点v为已确定最短路径。
5. 更新与v邻接但在V-S中的顶点u的最短路径长度:若经过v后,从源点到u比之前计算得到的距离更短,则更新这个距离值。
《数据结构课程设计》最短路径问题实验报告

目录一、概述 0二、系统分析 0三、概要设计 (1)四、详细设计 (2)4.1建立图的存储结构 (2)4.2单源最短路径 (3)4.3任意一对顶点之间的最短路径 (4)五、运行与测试 (5)参考文献 (6)附录 (7)交通咨询系统设计(最短路径问题)一、概述在交通网络日益发达的今天,针对人们关心的各种问题,利用计算机建立一个交通咨询系统。
在系统中采用图来构造各个城市之间的联系,图中顶点表示城市,边表示各个城市之间的交通关系,所带权值为两个城市间的耗费。
这个交通咨询系统可以回答旅客提出的各种问题,例如:如何选择一条路径使得从A城到B城途中中转次数最少;如何选择一条路径使得从A城到B城里程最短;如何选择一条路径使得从A城到B城花费最低等等的一系列问题。
二、系统分析设计一个交通咨询系统,能咨询从任何一个城市顶点到另一城市顶点之间的最短路径(里程)、最低花费或是最少时间等问题。
对于不同的咨询要求,可输入城市间的路程、所需时间或是所需费用等信息。
针对最短路径问题,在本系统中采用图的相关知识,以解决在实际情况中的最短路径问题,本系统中包括了建立图的存储结构、单源最短问题、对任意一对顶点间最短路径问题三个问题,这对以上几个问题采用了迪杰斯特拉算法和弗洛伊德算法。
并未本系统设置一人性化的系统提示菜单,方便使用者的使用。
可以将该系统大致分为三个部分:①建立交通网络图的存储结构;②解决单源最短路径问题;③实现两个城市顶点之间的最短路径问题。
迪杰斯特拉算法流图:弗洛伊德算法流图:费洛依德算法(任意建立图的存储迪杰斯特拉算4.1建立图的存储结构定义交通图的存储结构。
邻接矩阵是表示图形中顶点之间相邻关系的矩阵。
设G=(V,E)是具有n个顶点的图,则G的邻接矩阵是具有如下定义的n阶方阵。
注:一个图的邻接矩阵表示是唯一的!其表示需要用一个二维数组存储顶点之间相邻关系的邻接矩阵并且还需要用一个具有n个元素的一维数组来存储顶点信息(下标为i的元素存储顶点V的信息)。
邻接表实现迪杰斯特拉算法求最短路径-概述说明以及解释

邻接表实现迪杰斯特拉算法求最短路径-概述说明以及解释1.引言1.1 概述在图论中,寻找两个不同顶点之间的最短路径是一个常见的问题。
迪杰斯特拉算法是一种经典的解决最短路径问题的算法之一。
该算法采用贪心的策略,通过不断地更新起始顶点到其他顶点的最短距离,在最终找到最短路径的过程中。
邻接表是一种常用的图表示方法,将图的结构信息存储在一个表中,可以方便地查找与每个顶点相邻的顶点。
将迪杰斯特拉算法与邻接表结合起来,可以更高效地求解最短路径问题。
本文将介绍迪杰斯特拉算法的基本概念,并详细讨论如何通过邻接表实现迪杰斯特拉算法来求解最短路径问题。
通过对算法步骤的分析和实例的展示,读者将更加深入地理解迪杰斯特拉算法的原理和实现方式,以及邻接表在算法中的重要作用。
json"1.2 文章结构": {"本文主要分为引言、正文和结论三个部分。
引言部分将对文章进行整体概述,包括迪杰斯特拉算法的基本原理和应用背景。
正文部分将详细介绍迪杰斯特拉算法的原理和邻接表的概念及构建方法,同时介绍如何利用邻接表实现迪杰斯特拉算法求解最短路径问题。
结论部分将总结迪杰斯特拉算法在最短路径问题中的应用情况,探讨邻接表实现迪杰斯特拉算法的优势,并展望未来可能的研究方向。
"}1.3 目的本文的目的是介绍如何利用邻接表实现迪杰斯特拉算法求解最短路径问题。
通过深入讨论迪杰斯特拉算法的原理和邻接表的构建方式,帮助读者理解算法的具体实现过程。
此外,我们还将分析邻接表实现迪杰斯特拉算法的优势和应用场景,以及展望未来在这一领域的研究方向。
通过本文的阐述,读者将能够更好地掌握迪杰斯特拉算法在最短路径问题中的应用,并在实际工程中灵活运用该算法解决复杂的路径规划问题。
2.正文2.1 迪杰斯特拉算法简介迪杰斯特拉算法是一种用来求解最短路径的经典算法,也被称为单源最短路径算法。
该算法由荷兰计算机科学家艾兹格·迪杰斯特拉在1956年提出。
单源最短路径算法

单源最短路径算法常见的单源最短路径算法有迪杰斯特拉算法(Dijkstra's algorithm)和贝尔曼-福特算法(Bellman-Ford algorithm)。
本文将详细介绍这两种算法的实现原理和特点。
1.迪杰斯特拉算法:迪杰斯特拉算法是一种用于求解带权重图的单源最短路径的算法。
它的基本思想是,维护一个集合S,初始时包含源节点,不断地向集合S中加入离源节点最近的节点,直到所有节点都加入了集合S。
在每次加入节点的过程中,更新源节点到集合S中每个节点的最短距离。
迪杰斯特拉算法的步骤如下:1)初始化源节点的最短距离为0,其他节点的最短距离为无穷大。
2)将源节点加入集合S。
3)对于源节点的每个邻居节点,更新从源节点到邻居节点的最短距离。
如果更新后的距离更短,更新邻居节点的最短距离。
4)从集合S中选择一个离源节点最近的节点加入集合S,并重复步骤35)重复步骤4,直到所有节点都加入了集合S。
迪杰斯特拉算法的时间复杂度为O(V^2),其中V是节点的数量。
在稠密图中,即边的数量接近节点的数量平方时,迪杰斯特拉算法表现较好。
2.贝尔曼-福特算法:贝尔曼-福特算法是一种用于求解带有负权重边的单源最短路径的算法。
与迪杰斯特拉算法不同的是,贝尔曼-福特算法可以处理负权重边。
贝尔曼-福特算法的基本思想是,通过对边进行松弛操作,不断地更新节点的最短距离,直到找到所有节点的最短距离。
算法的步骤如下:1)初始化源节点的最短距离为0,其他节点的最短距离为无穷大。
2)对于边的数量-1次迭代,做以下操作:a)遍历所有边,对每条边(u,v),如果源节点u的最短距离加上边的权重w小于目标节点v的最短距离,则更新目标节点v的最短距离。
3)再进行一次遍历,如果仍然存在可以松弛的边,则说明存在负权重环。
贝尔曼-福特算法的时间复杂度为O(V*E),其中V是节点的数量,E 是边的数量。
相较于迪杰斯特拉算法,贝尔曼-福特算法的时间复杂度更高,但是它可以处理带有负权重边的图。
迪杰斯特拉最短路径算法
迪杰斯特拉最短路径算法迪杰斯特拉最短路径算法是一种求解从一点到其它所有点间的最短距离的经典算法。
这个算法的基本思想是通过一个当前最短距离的顶点集来求出从起点到其它所有顶点的最短路径。
迪杰斯特拉最短路径算法通常用于有权图中计算最短路径,即每条边都有一个权值。
算法思路迪杰斯特拉最短路径算法的核心思路在于维护一个记录起点到图中每个顶点的最短距离的数组dist[],同时维护一个标记数组mark[]用于标记每个顶点是否已经被访问过。
首先将起点标记为已访问,并将其到其它所有顶点的距离初始化为无穷大。
然后遍历起点所有的邻居节点,更新其邻居节点到起点的距离,并将邻居节点标记为已访问,接着从未标记为访问过的节点中选取距离最小的节点作为下一个处理节点,直到所有的节点都被访问。
算法的详细流程如下:1.从起点s开始,将起点距离初始化为0,其它点的距离初始化为无穷大。
2.标记起点为已访问。
3.对起点s的所有邻居节点进行松弛操作:对于起点到邻居节点v的距离dist[v],如果经过当前处理节点u的路径长度比原来的距离更短,则更新dist[v]和标记mark[v]。
4.从未标记为访问过的节点中选取距离最小的节点作为下一个处理节点。
5.对下一个处理节点进行松弛操作,以此类推,直到所有节点都被访问。
算法优化迪杰斯特拉最短路径算法存在一些优化算法,使得算法更加高效。
以下介绍几种优化算法:1.堆优化在每一次选取距离最小的未访问节点的过程中,可以使用堆优化算法将选取节点的时间复杂度从O(n)优化到O(logn)。
堆优化可以使用最小堆或者斐波那契堆。
2.早期退出如果当前处理的节点u到起点s的距离已经比dist[u]更大,那么就不需要继续处理u的邻居节点了。
这种情况下,可以提前结束算法,因为后面的处理节点不可能比u更优。
3.双向搜索通常来说,单向搜索是从起点向终点搜索,而双向搜索是从起点和终点同时搜索。
对于有向无环图,双向搜索可以大大降低时间复杂度,因为搜索过程中相遇的点一定是最短路径上的点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《数据结构与数据库》实验报告实验题目图的建立与遍历并求单源最短路径学院:化学与材料科学学院专业班级:09级材料科学与工程系PB0920603姓名:李维谷学号:PB09206285邮箱:liwg@指导教师:贾伯琪实验时间:2010年11月7日一、需要分析问题描述:编制一个可以对图进行遍历和用迪杰斯特拉算法求指定顶点到其余各顶点的最短路径的程序。
问题分析:由于图的结构比较复杂,任意两个顶点之间都可能存在联系,因此无法以数据元素在存储区中的物理位置来表示元素之间的关系,即图没有顺序映像的存储结构,但可以借助数组的数据类型表示元素之间的关系,即邻接矩阵表示方法。
由于图的任一顶点都可能和其余的顶点相邻接,所以在访问了某个顶点之后,可能沿着某条路径搜索之后,又回到该顶点上,故图的遍历比树的遍历要复杂。
为了避免同一顶点被访问多次,在遍历图的过程中,必须记下每个已访问的顶点。
通常两条遍历图的路径:深度优先搜索和广度优先搜索。
求某个源点到其余各个顶点的最短路径,可以采用迪杰斯特拉(Dijkstra)算法。
1、选择建立图的类型;2、根据所选择的类型用邻接矩阵的存储结构构建图;3、对图进行深度优先搜索和广度优先搜索;4、查找某个顶点的第一邻接顶点;5、借助迪杰斯特拉算法从某个源点起求最短单元路径。
算法规定:输入形式:为了方便操作,规定图的顶点元素类型都为字符型,网的权重为整型。
先要输入欲建图的顶点数和弧数,再进行图的元素和权重的输入。
输出形式:以邻接矩阵的形式输入图的存储形式,相邻接顶点的弧长用“1”或权重表示,不相邻接的弧长用“ ”(设计中用一个较大数字代替)表示,自身与自身的弧长用“0”表示。
再以字符形式输出深度和广度搜索的结果及第一邻接点。
测试数据;图的类型为有向网,7个顶点,10条弧<b,a>=20,<b,c>=10,<b,d>=30,<a,g>=9,<c,e>=5,<e,d>=12,<g,c>=18,<e,g>=15,<f,g>=10,<f,e>=8 从b 开始深度优先搜索:b,a,g,c,d,e,f 广度优先搜索b,a,c,d,g,e,f b 的第一邻接点有a,c,d 以b 为源点,到其余各顶点的最短路径为:b->a 20,b->b 0,b->c 10,b->d 27,b->e 15,b->f 无穷大,b->g 29.二、 概要设计程序中将涉及下列两个抽象数据类型:一个是图,一个是队列。
1、设定“图”的抽象数据类型定义:ADT Graph{数据对象V :V 是具有相同特性的数据元素的集合,称为顶点集。
数据关系R :{}()},),(,,,,|w v,{的意义或信息定义了弧谓词的弧,到表示从><><∈><==w v w v P w v w v w v VP w v VR VR R基本操作P :CreateGraph(&G,V ,VR);初始条件:V 是图的顶点集,VR 是图中弧的集合。
操作结果:按V 和VR 的定义构造图。
LocateVex(G,u);初始条件:图G 存在,u 和G 中的顶点有相同特征。
操作结果:若G 中存在顶点u ,则返回该顶点在图中位置;否则返回其他信息。
First_next_adj (G ,v );初始条件:图G 存在,v 是G 中某个顶点。
操作结果:返回V 的第一个邻接顶点。
若顶点在G 中没有邻接顶点,则返回“空”。
DFSTraverse(G,i);初始条件:图G 存在,i 为某个顶点在邻接矩阵中的位置。
操作结果:以i 为起始点,对图进行深度优先遍历。
BFSTraverse(G,i);初始条件:图G 存在,i 为某个顶点在邻接矩阵中的位置。
操作结果:以i 为起始点,对图进行广度优先遍历。
}ADT Graph2、设定队列的抽象数据类型定义:ADT Queue{数据对象:D={i a },+∈∈N i BiTree a i 数据关系:R1={<1,-i i a a >|1-i a ,D a i ∈,i=2,…,n}约定1a 端为队列头,n a 端为队列尾。
InitQueue(&Q)操作结果:构造一个空队列Q。
EnQueue(&Q,&e)初始条件:队列Q已存在。
操作结果:插入元素e为Q的新的队尾元素。
DeQueue(&Q)初始条件:队列Q已存在。
操作结果:删除Q的对头元素,并返回其值。
QueueEmpty(&Q)初始条件:队列Q已存在。
操作结果:若Q为空队列,则返回1,否则0。
QueueLenghth(Q)初始条件:队列Q已存在。
操作结果:返回Q的元素个数,即队列长度。
GetHead(Q,&e)初始条件:Q为非空队列。
操作结果:用e返回Q的对头元素。
} ADT Queue3、本程序包含三个模块1)主程序模块void main( ){选择欲建图的类型;构建图并对其用邻接矩阵的形式打印;对图进行深度和广度优先搜索以及求某个顶点的第一邻接点;求某一源点到其余顶点的最短路径。
}2)图模块——实现图的抽象数据类型和基本操作3)队列模块——实现队列的抽象数据类型及今本操作三、详细设计1、主程序中需要的全程量#define INFINITY 1000 // INFINITY表示没有邻接的顶点间弧长 #define MAXVEXNUM 20 //最大顶点个数#define QUEUEINCREMENT 10 //队列扩展一次所增加的长度int visited[MAXVEXNUM]; //标记顶点是否已被访问的数组2、队列的建立与基本操作typedef struc t {QElemType *elem; //队列中存储的元素类型int front;int rear;int queuesize;int incrementsize;算法描述:为了对图进行广度优先搜索,需要“先访问的顶点的邻接点”先于“后被访问的顶点的邻接点”,故需运用到队列。
而考虑到广度优先搜索对队列操作的需要,只需进行队列的初始化,求队列的长度,队列增长,读取队头元素,入队和出队以及检查队列是否为空。
伪码算法:void InitQueue_Sq(SqQueue *Q,int n){ //初始化队列Q->elem=(QElemType *)malloc((QUEUE_INIT_SIZE+1)*sizeof(QElemType));Q->queuesize=n;Q->incrementsize=QUEUEINCREMENT;Q->front=Q->rear=0;}int QueueLength_Sq(SqQueue Q){ //求队列长度return(Q.rear-Q.front+Q.queuesize)%Q.queuesize;}int DeQueue_Sq(SqQueue *Q,QElemType *e){ //删除对头元素if(Q->front==Q->rear) return 0;*e=Q->elem[Q->front];Q->front=(Q->front+1)%Q->queuesize;return 1;}void incrementQueuesize(SqQueue *Q){ //队列扩容QElemType *a; int k;a=(QElemType *)malloc((Q->queuesize+Q->incrementsize)*sizeof(QElemType));for(k=0;k<Q->queuesize-1;k++)a[k]=Q->elem[(Q->front+k)%Q->queuesize];free(Q->elem);Q->elem=a;Q->front=0; Q->rear=Q->queuesize-1;Q->queuesize+=Q->incrementsize;}void EnQueue_Sq(SqQueue *Q,QElemType e){ //元素入列if((Q->rear+1)%Q->queuesize==Q->front)incrementQueuesize(Q);Q->elem[Q->rear]=e;Q->rear=(Q->rear+1)%Q->queuesize;}int GetQueue_Sq(SqQueue Q,QElemType *e){ //读队头元素if(Q.front==Q.rear) return 0;*e=Q.elem[Q.front];return 1;}int QueueEmpty(SqQueue Q){ //队列判空if(Q.front==Q.rear) return 1;elsereturn 0;}3、图的建立与基本操作typedef enum { DG,DN,UDG,UDN } Graphkind; //定义枚举类型{ 有向图,有向网,无向图,无向网} typedef struct ArcCell{int adj; // int(VRType)是顶点关系类型。
char *info; //该弧相关信息的指针}ArcCell, AdjMatrix[MAXVEXNUM] [MAXVEXNUM];typedef struct{char vexs[MAXVEXNUM][4]; //顶点向量AdjMatrix arcs; //邻接矩阵int vexnum,arcnum; //图的当前顶点数和弧数Graphkind kind; //图的种类标志}MGraph;算法分析:图的基本操作是本程序的核心,鉴于本程序中图是用邻接矩阵表示的,所以其建立与操作应建立在邻接矩阵上。
1)图的建立算法描述:图的种类分为有向图、有向网、无向图和无向网,虽然都可用邻接矩阵表示,但不同种类的图其数组元素的值是不同的。
在图中,顶点相邻接可用“1”表示,不邻接用“ ”表示;在网中,邻接可用其权值表示。
但在具体操作中,“无向图(网)”的弧只需赋值相同值即可,“有向图(网)”的弧不同方向是不同的值,这就要求有向和无向的弧数算法不一样。
所以在建立图时,注意到上述要求就可方便的建图。
1.判断欲建图的类型;2.输入欲建图的顶点数和弧数;3.输入顶点元素;4.构建顶点间的关系:有向图需区分起点、终点;有向网需区分起点、终点和权重,无向图只需输入相邻接的顶点,切忌重复输入;无向网还需输入权重。