movipro设置说明F专题培训课件
MOVITOOL SEW 变频器软件手册ppt课件

选择PC连接接口
SBUS、RS485地址
1
点击[Update]按钮 显示所有连接的变频器
连接的设备类型
TASC /ma lijun / 2005.9
关闭所有的工具
项目路径
Driving the world
TASC Training tianjin 2005
MOVITOOLS软件
2
记录系统数据 的应用程序
TASC Training tianjin 2005
MOVITOOLS软件
0
---MOVITOOLS4.2版本
TASC /ma lijun / 2005.9
Driving the world
TASC Training tianjin 2005
MOVITOOLS软件
MOVIDRIVE A型固定为9.6KBaud MOVIDRIVE B型由S13开关决定
反馈值滤波时间
侧速元件 Driving the world
TASC Training tianjin 2005
MOVITOOLS软件
第十二个窗口,设定系统参数
TASC /ma lijun / 2005.9
33
转速设定源 控制源
正转/反转的 上升/下降斜率 快停斜率 急停斜率 最低/最高转速
制动器功能 制动器释放时间 制动器制动时间
TASC /ma lijun / 2005.9
30
该列为建议值, 不可修改
下载列可以被修改 两列的不同设置
高亮显示
将建议值赋予 下载值
Driving the world
TASC Training tianjin 2005
MOVITOOLS软件
第十一个窗口,设定速度调节器参数
Movitrac说明
操作、安装简便 l 自动调整电机,使其运行在标准的U/f 控制模式和矢量型VFC控制模式 l 内置具有菜单指导操作的键盘 l 安装遵循“即插即用”原则 l 内置设定电位器 l 通过MOVITOOLS 软件完成参数设置与调试
� 安装方便、快捷
TASC / Malijun / May 8, 2003
方便型变频器
MOVITRAC 07
TASC / Malijun / May 8, 2003
3 Driving the world
Training \ TASC \ Driving Control Products
MOVITRAC 07
MC07系列范围 �电源电压 3x400V
电机功率 0,55 to 30 kW
客户利益:内置元件 MOVITRAC 07 ® With complete equipment
- EMC 输入滤波器
Class B (1x230V) Class A (3x230V /7,5kW
3x400V / 11kW )
- 制动电阻.
(optional up to 2,2 kW)
- 制动斩波器
- 控制面板
• 宽功率/电压范围
1 x 230 V 0,37 – 3 kW 3 x 230 V 0,37 – 30 kW 3 x 400/500 V 0,55 – 30 kW
• 标准控制模式 U/f 或 矢量控制模式 VFC
• 宽调速范围 1:6 U/f ; 1:100 VFC
• 高过载能力
125% IN 连续工作制 ,150% IN for 60 sec. max max. 180% MN (用于克服启动摩擦)
� 具有广泛的应用范围 高性能价格比
movipro设置说明演示幻灯片

18
参照电机铭牌信息,检查参数是否正确。点击下一步。
不使用编码器 数据(不选)
19
检查电机信息类型,此处不需要任何更改,核对无误后选择下一步。 异步电机 同步电机
20
输入电源电压400V, 参数P835电机温度传感器响应(Response TF sensor SIGNAL)选择快速 停止并报错(Immediate stop/fault) 参数P530电机温度传感器类型 (Sensor type 1)根据电机铭牌设定,SEW 电机基本上都是使用“TF/TH”, 选择下一步。
8
扫描完成后出现连接的所有设备。
MOVIPRO的通讯单元 MOVIPRO的功率单元(参数和配置均在此单元内进行) MOVIPRO的profisafe模块
9
四、电机初始化
连接新变频器和新电机时,必须进行电机初始化。电机初始化目的为配 对电机参数至变频器,(简单说就是让变频器知道需要控制的是什么类 型参数的电机) 选定变频器,点击电机初始化。(startup)
6
网络连接设置完成后,在网络连接处出现设置好的Ethernet连接方式。 点击在线,若再离线情况下无法进行下一步扫描。
此状态为在线 此状态为离线
选择连 接模式 和扫描
点击后,设备在线(online) 点击后,设备离线(offline)
7
右击Ethernet,选择扫描设备。(等待设备扫描,扫描一台SEW变频器约需 要30S,越多时间越长)
21
选择使用编码器(Yes,I use the encoder) 点击下一步。
22
控制模式 选择IPOS位置控制(Positioning with IPOS) 点击下一步。
速度控制 使用提升功能
MOVIPRO ETHERNET 设定参考
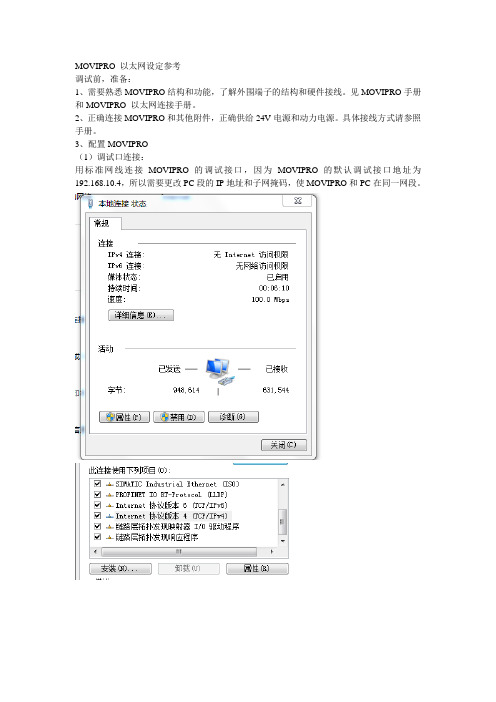
MOVIPRO 以太网设定参考调试前,准备:1、需要熟悉MOVIPRO结构和功能,了解外围端子的结构和硬件接线。
见MOVIPRO手册和MOVIPRO 以太网连接手册。
2、正确连接MOVIPRO和其他附件,正确供给24V电源和动力电源。
具体接线方式请参照手册。
3、配置MOVIPRO(1)调试口连接:用标准网线连接MOVIPRO的调试接口,因为MOVIPRO的默认调试接口地址为192.168.10.4,所以需要更改PC段的IP地址和子网掩码,使MOVIPRO和PC在同一网段。
设定IP地址和掩码,注:IP地址最后一位不能为0、4、255,其他0-255之间的数值均可。
如果怀疑网络未连接,可以用PIN命令,测试网络Pin 使用方法,开始-运行-输入pin 192.168.10.4确认,网络连接没有问题后,打开调试软件MOVI-studio设定连接方式:以太网点Edit,看地址设置是否有改动,一般默认设置即可。
设置完成后,点击SCAN功能。
等待,直到系统查找到所有设备。
其中,192.168.10.4【unnamed】单元为通讯与运动控制单元。
需要进行数据类型和数据大小配置。
SBUS 1 下20:【unnamed】单元为轴模块单元,需要进行电机初始化设置和功能块设置。
注:192.168.10.4为调试接口地址,不是以太网中的设备地址。
20为轴模块SBUS 1地址,一般不用修改。
至此,调试通讯连接完成。
(2)通讯与运动控制单元配置。
左键单击,在右侧的功能窗口中,选择打开,选择fieldbus-ethernet,设定ethernet参数:其中,IP地址是设备在以太网中的地址,DHCP功能根据现场需要进行选择性开关。
取消DHCP功能如图所示,选择“Saved IP parameters”。
其他参数按需设定,如果没有特殊要求,默认参数即可。
配置以太网通讯控制字参数,打开如下菜单:在开始向导页面中,选择“Creat new configuration”按钮:出现如下画面,选择Application module下的过程字,现场使用的是扩展总线定位模块(Extend position via fieldbus),需要6个过程字,配置6个过程字,配置完成后,点击Configuration,出现绿色√后,点击下一步,按照向导提示将配置载入MOVIPRO中。
ControlLogix數位I O模組 使用手冊说明书

熱電中插拔 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37 模組故障報告 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37 可設定的軟體 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38 電子鍵控 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38 模組禁止 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39 使用系統時鐘為輸入加上時間戳記及排程輸出. . . . . . . . . 40 生產者/消費者通訊 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43 狀態指示燈資訊 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
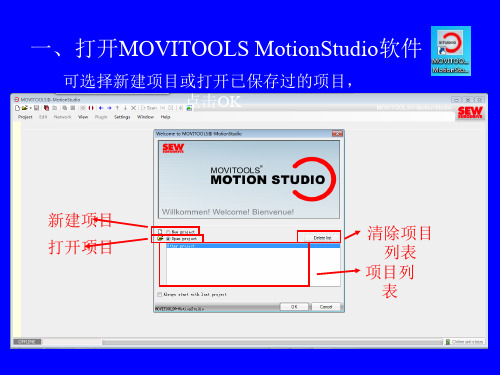
MotionStudio软件操作及MOVIFITFC初始化详解ppt课件

Sample Interval 采样间隔
采样间隔决定了每一次的扫描时间,每一个通道有2048个 存储单元。例如:采样间隔为1ms时,整个记录时间为2.048S. 采样间隔时间从1ms---1000 ms;
Trigger source 触发源
设定一事件用于触发记录。当存储器存满以后,停止记录。 触发事件可以为:二进制输入、二进制输出、停止按钮 当控制器故障时,也可激活触发事件;
配置完StartUp,则可手动试车,点击进入ManualMode,注意:手
动试车后要记得关闭,即Deactivate Manual Mode再退出!
可以通过软件进行通讯数据的监控和模拟PLC控制,见以下界面
此步为只读信息,显示变频器基本信息,缺省设置 及缺省匹配电机。
如果为easy mode 则只能进行至此步。
驱动电机选择:固定驱动;切换驱动电机
选择驱动电机数量:Single单台电机;Identical多台同样电机; Different多台不同电机
选择控制方式:FluxVectorControl矢量控制;v/f变压变频控制; 推荐使用矢量控制!
1.切换到在线模式 2.切换到离线模式
8
5.应用工具
1)从右键菜单中调用
如电机初始化,变频器 参数,手动操作,参数 备份等功能均可以通过 右键菜单调用
9
2)从 tool start page调用
10
6.读取改变单元参数,变频器参数可以直接修改,回车确认即生效,不需要下载。
11
7.保存设置
有两种方式保存在线单元的配置 1)项目保存 2)数据保存 *建议应用项目保存方式,可以离线打开保存文件
Trigger edge 触发边缘
PRE-trigger 预触发时间
MOVIPRO与WCS3B-辊床调试说明

Version:ETAC_2014_6
Driving the world
MOVIPRO与WCS3B-LS311D在滚床上的应用说明
20、重新进入外部编码器初始化,点击Mounting,进入电机编码器与外部编码器的转速-位移匹配界面。
Version:ETAC_2014_6
Driving the world
8、根据向导完成Configuration,完成后三角形感叹号会编程绿色√。
Version:ETAC_2014_6
Driving the world
MOVIPRO与WCS3B-LS311D在滚床上的应用说明
9、 点击Next,选择With controller software,再点击下载,下载的过程时间会比较长,中途不要断开 连接。
Version:ETAC_2014_6
Driving the world
MOVIPRO与WCS3B-LS311D在滚床上的应用说明
调试过程
由于此应用需要用到IPOS程序,而MOVIPRO并不开放IPOS编程,需要进入内部功能,输入密码来实现。 过程如下: 1、点击Settings
2、输入密码
Version:ETAC_2014_6
Driving the world
MOVIPRO与WCS3B-LS311D在滚床上的应用说明
Configurator
1、 在左侧项目栏中选中MOVIPRO 的PLC,点击Configurator。
2、在弹出的对话框中添加一个新的 配置,点击create new configuration。
3、添加一根新轴
Driving the world
MOVIPRO与WCS3B-LS311D在滚床上的应用说明
movifit调试步骤PPT
提升控制 模式
DC抱闸 控制
转动控制 模式
进入电机类型设置,根据 电机名牌型号选择电机类
型, 点击Next。
普通SEW电 机
不 同
其他认证的SEW 电机
同步电机
非SEW电 机
进入选择电机设置,根据系统提示和操控电机铭牌 进行设置,
设置后可点击电机数据(Motor data),弹出消息框 的参数与铭牌参数核对。 点击Next。
选中此 处变频
器 (EBO
X)
电机初始 化
参数目 录
手动运 行
进入初始化画面后选择参数组1(Parameter set 1), 点击Next。
参数 参数组2 组1
初始化步骤: 电机初始化 应用参数 系统极限值
进入单元信息(Unit information)可以查看变频器与电 机的基本参数, 点击Next。
否则禁止使用手动模式运行设备。
选中此 处变频
器 (EBO
X)
手动模 式
进入手动控制页面并满足安全回路后。 点击激活手动模式(Activate manual mode)便可进
行手动模式控制电机运行。
速度时间显示图(不 激活手可动更模改)
式 快速 慢速 自定义
(自定义速度更改后需 要按回车键 Enter) 速度爬坡时间 总线连接报错 延时
进入电机连接,根据实际情况选择控制固定电机 (Fixed)或者可切换控制电机(Switchable),一般
选择控制固定电机(Fixed), 点击Next。
控制单个 固定的电
机
可切换控制电机, 主要用于控制多
个电机
进入系统连接画面后,选择控制单个电机(Single 点d击rivNee)控机xt,。制(多有个钢电性
工业机器人课件-Mov指令的功能、语法结构和使用方法

Mov指令的功能、语法结构与使用方法
Mov指令的功能
以关节插补的方式将控制点从起点位置移到目标位置, 控制点的移动轨迹是随机的曲线。
Mov指令的功能、语法结构
Mov指令的语法结构
格式:Mov口<目标位置>[,<接近距离>][口Type口<常数1>,<常数2>] 口[附随语句]
Mov指令的功能、语法结构
Mov指令的参数
(1)目标位置:直交位置或关节位置类型的常量或变量。 不可省略。
(2)接近距离:指定此值的情况下,实际的移动目的位 置会往以TOOL坐标的Z轴方向(+/-方向)往指定距离的偏离 位置动作。以常数或变量指定。对于RV机器人而言,在数值 前加负号“-”;对于RH机器人而言,在数值前加正号“+”。 可省略。
(3)<常数1>:赋值1/0,指定绕道/走近路的动作方式。 初始值为1。可省略。
(4)<常数2>:无效。可省略。
(5)附随语句:使用Wth或Wthif语句。可省略。。
Mov指令的功能、语法结构
MoБайду номын сангаас指令的举例
Mov指令的功能、语法结构
使用说明:
(1) 在关节插补里称的绕道,是指以示教姿势做动作的意 思。会有因示教时的姿势而变成绕道动作的情况。
(2) 所谓走近路是指在起点·终点间的姿势,在动作量少的 方向进行姿势的插补。
(3) 绕道/走近路的指定,是指开始位置和目的位置的动 作范围,有±180度上的移动量的意思。
(4) 即使在有指定走近路的情况下,目的位置在动作范围 外的时候,也会往返方向绕道动作。
MOVIPRO_ADC_Workbook工作手册

电机 OK
10/29/2015
3.2 电机配置,进入下一步
38
SSEEWW--EEUURROODDRRIVIVEEGGmmbHbH&&CCooKKGG——GrGoßro/ ßM/EMDED
进入下一步
10/29/2015
执行电机初始化
SSEEWW--EEUURROODDRRIVIVEEGGmmbHbH&&CCooKKGG——GrGoßro/ ßM/EMDED
SSEEWW--EEUURROODDRRIVIVEEGGmmbHbH&&CCooKKGG——GrGoßro/ ßM/EMDED
将单元参数保存到电脑中, controller 部分生成 .vdmpror文件, power部分 生成.vdmprolt文件
10/29/2015
将项目文件导出到外部文 件中(离线可以进行)
10/29/2015
选择新建一个新配置
SSEEWW--EEUURROODDRRIVIVEEGGmmbHbH&&CCooKKGG——GrGoßro/ ßM/EMDED
19
10/29/2015
2.3 新项目界面
SSEEWW--EEUURROODDRRIVIVEEGGmmbHbH&&CCooKKGG——GrGoßro/ ßM/EMDED
22
10/29/2015
2.4 配置PD结 构
SSEEWW--EEUURROODDRRIVIVEEGGmmbHbH&&CCooKKGG——GrGoßro/ ßM/EMDED
23
10/29/2015
2.5 左键单击configuration,后边会有绿色对勾,表示已经配置 完成
MoviPRO培训测试题

MoviPRO产品培训测试题车间:工号:姓名:得分:1,MoviPro产品目前分为 , , 三个版本。
2,MoviPro功率从 KW至 KW,分为3个Size。
3,MoviPro的硬件结构分为3部分,分别是PFH 单元,PFA 单元和PFE 单元。
4,铭牌信息中,如PFA-MD...B-G..-BG40-../C../000其中的40代表。
5,MoviPro目前所支持的现场总线包括,,,,。
6,如图示所连接的MoviPro是版本的:7,出厂设定中,MoviPro调试接口默认的IP地址为,故需将调试的电脑IP地址设置在相同网段。
8,做StartUp时,下载需要变频器处于,可通过断开短接端子来实现。
9,SD卡自动存储功能只有在PFA固件版本在及以上才可实现,该版本可在参数P 中查看。
10,PFA的参数中,恢复工厂初始设定的参数为P ,它分为和,其中是将PFA所有数据(StartUp,Parameter,ApplicationModule)均恢复工厂设定。
11,PFA参数中,最重要的运行模式OperatingMode为参数P ,当从模式VFC 切换至CFC时重新做StartUp,当从模式VFC切换至VFC & Hoist时重新做StartUp。
12,改变电机转向可通过修改参数P 来实现,或者调换电机相序(如有编码器还需同时调换编码器相序)。
13,如数码管显示“A1F 08”表明当前状态为PFA ;如数码管显示“A18”表明当前状态为PFA 。
14,PFH与PFA之间通讯为,其波特率为。
15,Scope工具可采集个数据点,每两点之间的时间间隔可设置从 ms 至 ms,它可同时采集个通道的数据。
16,应用模块“Extended Bus Positioning”使用了6个PO,分别为PO1 ,PO2 ,PO3 ,PO4 ,PO5 ,PO6 。
17,应用“Extended Bus Positioning”进行自动定位运行时,到位信号的输出是当实际位置值到达设定位置(参数P 所设定的)定位窗口内时产生的。
MOVIPRO与WCS3B汇总

Version:ETAC_2014_6
Driving the world
MOVIPRO与WCS3B-LS311D在滚床上的应用说明
7、点击Approved encoder,在下表中找到WCS3B-LS311,并选择,完成后点击OK。
Version:ETAC_2014_6
Driving the world
• 倍加福PEPPERL+FUCHS WCS3B-LS311D编码尺
Version:ETAC_2014_6
Driving the world
MOVIPRO与WCS3B-LS311D在滚床上的应用说明
安装说明
• 外部编码器WCS3B-LS311D 由两部分组成:编码尺和读码 头。 • 编码尺安装在台车上,根据台 车的长度,编码尺约3-4米, 随台车移动。 • 读码头固定安装在滚床上。
Driving the world
MOVIPRO与WCS3B-LS311D在滚床上的应用说明
这时我们可以通过DEU卡件来屏蔽外部编码器脱码故障。在参数树中选择Encoder slot option DEU 下的SSI synchronous encoder,修改里面的参数: (1)、将Dynamic tolerance range中的5,000改成 40,000,000。 动态公差范围改成40,000,000原因是因为当编码 尺脱离读码头时H510的数值会从当前数值跳跃到
3、点击Perform startup。
Version:ETAC_2014_6
Driving the world
MOVIPRO与WCS3B-LS311D在滚床上的应用说明
4、先做电机编码器的初始化,点击Edit manually。
MOV基础知识培训手册
压敏电阻器基础知识培训手册第一章通用型氧化锌压敏电阻器阻电1.1什么是“压敏电阻器”“压敏电阻器”是中国大陆通用的名词,在中国台湾地区,它被称为“突波吸收器” ;在日本,它被称为“變阻器”;国际电工委员会 (IEC )在其标准中称之为 “voltage dependentresistor ”(简称VDR );而在业界和学术界最广泛使用的名词则是“ varistor ”(即由variable和resistor 两个英文单词组成的组合词)。
从字面上理解,这些名词的含义为“电阻值随着外 加电压敏感变化的电阻器”。
那么压敏电阻器的电阻值是如何随着外加电压变化敏感的呢?图 1-1-1和表1-1-1可以给我们一个比较直观的说明。
从中我们可以看到,型号为20D201K 的压敏电阻器随着外加电压从180V 上升到420V ,其电阻值从18 M Q 下降为0.42 Q ,在这个过程里,电压仅上升 了 2.33倍,而电阻值下降了 4280多万倍。
由此可见压敏电阻器的电阻值对外加电压的变化 是非常“敏感”的。
1.0E+08 1.0E+07 1.0E+06 1.0E+051.0E+041.0E+03 1.0E+021.0E+01 1.0E+00 1.0E-01100150200250300350400450外加电压(V)图1-1-1 20D201K 压敏电阻电阻值与外加电压的关系U ( V )180 192 200 250 310 356 420 R ( Q)1.8 X 1071.92 X 106200X 103250313.560.42压敏电阻的确切定义可从材料、 特性和用途三个方面综合得出。
从材料组成上看,压敏电阻是由电子级粉体材料-氧化锌、氧化铋、氧化锑、氧化钛、氧化钻、氧化锰、氧化镍、 氧化铬等多种氧化物合成的,其中,氧化锌的含量最高(约 90%),是主基料;其他各种过 渡金属氧化物的含量相差很大, 较多的占百分之几,较小的仅有十万分之几, 被称为添加剂; 压敏电阻就是由主基料和添加剂按照配方一一称好后,经球磨、喷雾造粒、干压成型、排胶、烧结、表面金属化、插片、包封、打标等一系列标准的精细电子陶瓷和通用元件工艺制造而 成的。
数字视频编辑软件Premierepro功能介绍及教程PPT课件
(2)复制和粘贴素材
• 在Premiere Pro中,编辑素材常常会用到复制和粘贴命令。选择“编辑”菜单命令,可以看到,在下拉菜 单中“粘贴”、“粘贴插入”和“粘贴属性”等几种粘贴方式。
• 粘贴 • 这种方式是直接在时间线标尺处粘贴素材,当后边有其他素材时,所粘贴的素材会覆盖后边相应长度的素
第29页/共65页
4. 添加视频转场
• Premiere Pro共提供了多达 73种视频转场效果,它们被分 类保存在10个文件夹中,如图 所示。
Premiere Pro提供的10类视频转场效果
第30页/共65页
• 添加视频转场效果的步骤如下:
• (1)单击项目窗口中的“特效”选项卡,单击 “视频转场”文件夹前面的展开图标,将会展 开一个视频转场的分类文件夹列表;通过单击 某一类文件夹左侧的展开图标,即可打开当前 文件夹下的所有转场;
第41页/共65页
选中Motion选项后画面出现了控制方框
第42页/共65页
• 为了清楚地看到方框的移动轨迹,可以调节预览窗口的缩放级别(如10%)。将鼠标指针 移动到控制方框内,拖动方框并移出显示窗口,这时候素材在窗口中已经看不见了, “Position”(位置)的数值也发生了变化。将时间线标尺移动到素材开始处,单击 “Position”前面的按钮,在此处添加一个路径控制点(关键帧),如图所示。
• 改变素材的持续时间 • 在时间线窗口的工具栏中单击选择工具,并将鼠标移动到素材的两端,当鼠标指针变为或者的形状时,拖
动鼠标就可以改变素材的持续时间。
第24页/共65页
• 改变视频和音频素材的长度和速率 • 在项目窗口或时间线窗口中选择素材后右击鼠标,选择“速度∕持续时间”命令,在打开的“速度∕持续时间”
课件:制动整流器

三、现场使用与接线方式
同时切断,快速制动
三、现场使用与接线方式
3.集成在变频器内的制动整流器
应用:安装在现场的部分变频器,内部集成有整流功能,不需要外 加整流块;若电机自身带有整流块,必须将整流块取消不用。
现场使用:Movifit,Movidrive,Movimot
制动方式:根据需要在Movitools软件设置
制动整流器
部门 Division 版本号 Version 更新日期 Date
涂装维修 01 2015.7.10
——李水伟
目录
➢一、制动整流器的介绍 ➢二、制动整流器的分类 ➢三、现场使用与接线方式 ➢四、注意事项与日常维护
一、制动整流器的介绍
制动整流器:把交流电转换成直流电的电机抱闸模块 功能:实现电机抱闸的打开与关闭 作用:释放抱闸信号控制制动线圈的通断
翻转电机:电机抱闸的蓝、红、白分别接到X2012_2:B2、 X2012_2:B3、X2012_2:B4端子
行走电机:电机制动整流器集成在Movimot内
三、现场使用与接线方式
Movimot的抱闸接线方式
Movimot的抱闸接线:电机的红、 白、蓝线分别接至MOVIMOT的 X1:13、X1:14、X1:15端子。
三、现场使用与接线方式
SEW厂家 工作指示灯 1与2,380V交流电输入
3与4,24V直流电输入
接电机抱闸线 13.接红色线 14.接白色线 15。接蓝色线
三、现场使用与接线方式
指示灯
生产日期:2012.10.11
UIN:直流电输入 UE:交流电输入 IN:直流电流输入
三、现场使用与接线方式
制动整流器接线图
Movidrive控制接触 器,通断UAC,UDC实现 抱闸的打开与关闭
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
网络连接设置完成后,在网络连接处出现设置好的Ethernet连接方式。 点击在线,若再离线情况下无法进行下一步扫描。
此状态为在线 此状态为离线
选择连 接模式 和扫描
点击后,设备在线(online) 点击后,设备离线(offline)
右击Ethernet,选择扫描设备。(等待设备扫描,扫描一台SEW变频器约需 要30S,越多时间越长)
下载状态条 下载设置
初始化完成后,会跳出提示框,点击“确定”。
五、手动运行
当完成初始化后,可使用手动运行。(Manual mode) 注意:若使用实验台进行调试时,可使用手动模式试运行。 若调试现场变频器设备时,除了对设备运行非常了解,否则禁止使用手 动模式运行设备。
手动运行模式
满足安全回路或者使用安全STO接头短接外部安全回路。 点击激活手动模式(Activate manual mode)便可进行手 动模式控制电机运行。
使用建议值
(根据编码器铭 牌信息进行手动 选择)
不使用铭 牌信息
(此功能 只在更换 特殊编码 器后使用)
系统会自动读取编码器类型,(均使用电机编码 器)但需要核对,若与电机铭牌信息符合,点击 Next,若不符合,点击Setting进行编码器重设 (Setting)。
电机编码器
编码器重设 外部编码器
速度时间显示图(不可更改)
激活手动模式 快速 慢速 自定义 (自定义速度更改后需要按回 车键 Enter)
与变频器的连接方式
进入IP地址编辑(Edit)后,只使用SMLP,不使用Ethercat。可手动自 由更改时间和地址,时间一般不更改,IP地址使用网络适配器地址 (Network adapter),点击进入即可。
激活SMLP
时间
网络适配器
不激活Ethercat
IP地址
扫描时间
进入网络适配器(Network adapter)后,选择适配器建议地址,点 击OK,更改IP地址后点击OK。确定连接方式完成,点击OK。(此 步骤需要点击3次OK)
参数均为变频器读取得出,不 能更改(显示为灰色)
选择执行完整的电机初始化(Execute complete start-up),选择下一步。
执行完整电机初始化
执行部分初始化 优化运动控制
选择 控制单个电机(Stand-alone motor )<电压矢量控制/伺服控制 (Vector-controlled/Servo) 点击下一步。
扫描完成后出现连接的所有设备。
MOVIPRO的通讯单元 MOVIPRO的功率单元(参数和配置均在此单元内进行) MOVIPRO的profisafe模块
四、电机初始化
连接新变频器和新电机时,必须进行电机初始化。电机初始化目的为 配对电机参数至变频器,(简单说就是让变频器知道需要控制的是什 么类型参数的电机) 选定变频器,点击电机初始化。(startup)
电机初始化
选择此处 的变频器
参数目录
手动运行
进入初始化画面后选择完整电机初始化。(Perform startup)
完整电机初始化 控制器优化
1、进行电机编码器初始化 选择使用编码器铭牌信息(Accept data permanently),点击Next。
使用编码器铭牌
(由变频器读取编 码器铭牌信息)
新建项目完成。
项目(项目名称)
网络
三、连接设备
选中"网络"(Network),右击,选择“连接方式”(communication)
所有SEW变频器初始地址都为192.168.10.4,电脑需要先设置成相同 网段地址,选择"Ethernet",点击OK即可。若变频器IP地址更改,则 需要点击“Edit”。
设备建议值
设定值 使用建议值
同上点击使用建议值(Apply proposal),把建议值导入至设置值。 点击下一步。
设定值
设备建议值
使用建议值
同上点击使用建议值(Apply proposal),把建议值导入至设置值。 点击下一步。
设备建议值
设定值 使用建议值
点击下载(Download)等待下载结束后点击完成。
单个电机 标准V/f控制 电压矢量控制/伺服控制
控制多个不 同电机
控制多个相同电机 (可选择电机数量) 电机间有刚性连接 电机间没有刚性连接
参照电机铭牌信息,检查参数是否正确。点击下一步。
不使用编码器 数据(不选)
检查电机信息类型,此处不需要任何更改,核对无误后选择下一步。 异步电机 同步电机
输入电源电压400V, 参数P835电机温度传感器响应(Response TF sensor SIGNAL)选择快速 停止并报错(Immediate stop/fault) 参数P530电机温度传感器类型 (Sensor type 1)根据电机铭牌设定,SEW 电机基本上都是使用“TF/TH”, 选择下一步。
进入电机编码器重设后,根据电机铭牌信息进行设置,完成后点击OK。 重设完成后点击Next。
SEW编码器
普通编码器
不使用编码器
选择下载编码器设置至变频器并进行电机初始化。(Download and motor startup),点击Next。
下载编码器设置 下载编码器设置并 进行电机初始化
2、进行电机初始化 选择parameter set 1,点击“Start-up Set 1”。 (如果需要两套参数运行,parameter set-2设置采取同样步骤)
电流矢量控制 电压矢量控制
准确填写负载转动惯量(Load inertia)此数据一般为”JO motor“数 据的3至5倍,具体数值根据实际负载而定。 其他参数一般不需要作任何改动。
点击下一步。
3至5倍
钢度 设定范围:0.5…2 默认值为“1”
其他重要参数更改,当建议值与设定值不相同时显示黄色,相同时显示白色。 点击使用建议值(Apply proposal),把建议值导入至设置值。 点击下一步。
选择使用编码器(Yes,I use the encoder) 点击下一步。
控制模式 选择IPOS位置控制(Positioning with IPOS) 点击下一步。
速度控制 使用提升功能
IPOS位置控制 转矩控制
控制方式 选择电压矢量控制VFC(Voltage mode flux control) 点击下一步。