整条烟喷码线及码垛机构的设计-任务书
码垛机设计方案
码垛机设计方案(总12页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--码垛机设计方案(一)一:系统方案概述经对贵公司产品、场地的分析,技术需求、指标的详细研究和理解,为了充分满足该技术要求,对本工程我们采用方案附图所示的机器人码垛系统。
一:总体方案本机器人码垛系统,通过品质一流品牌的接近开关、按钮开关、可编程控制器等硬件和专家设计的专门控制软件相结合,实现了从客户自身的包装线出来的站立式包装袋到最后的码垛成型,均为无人的高度自动化系统。
完善的安全联锁机制,可以对设备和操作人员提供保护。
图形显示的触摸屏使整个系统操作简单,故障诊断容易,同时方便了检修和维护。
并且每套系统出厂都经过严格的系统测试,保证客户的运行安全、可靠、稳定。
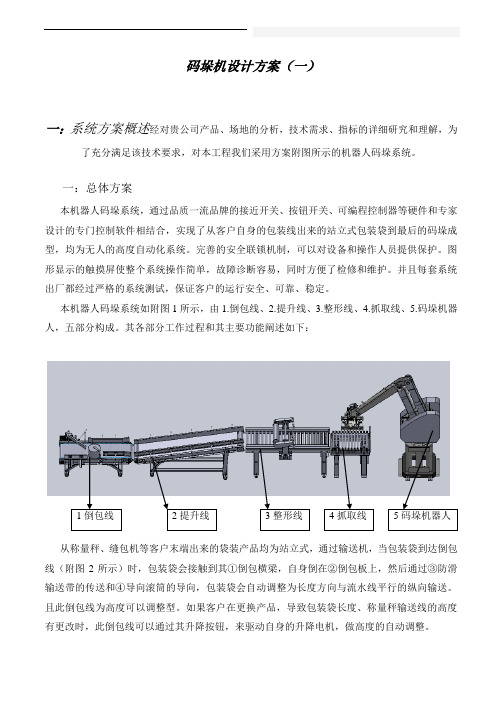
本机器人码垛系统如附图1所示,由1.倒包线、2.提升线、3.整形线、4.抓取线、5.码垛机器人,五部分构成。
其各部分工作过程和其主要功能阐述如下:从称量秤、缝包机等客户末端出来的袋装产品均为站立式,通过输送机,当包装袋到达倒包线(附图2所示)时,包装袋会接触到其①倒包横梁,自身倒在②倒包板上,然后通过③防滑输送带的传送和④导向滚筒的导向,包装袋会自动调整为长度方向与流水线平行的纵向输送。
且此倒包线为高度可以调整型。
如果客户在更换产品,导致包装袋长度、称量秤输送线的高度有更改时,此倒包线可以通过其升降按钮,来驱动自身的升降电机,做高度的自动调整。
2提升线3整形线4抓取线5码垛机器人1倒包线附图2:倒包线由于产品从不同高度,客户端输送和倒包线有高度调整,为了更好统一的做码垛规划,最大发挥码垛机器人的功效和码垛能力,现增加提升线(附图3所示)将倒包线出来的包装袋提升到某一统一高度。
此提升线为配合前段的自动升降,亦增加有自动升降按钮,可以调节升降电机控制单边提升高度与前段平齐,保证后端高度不变。
附图3:提升线当产品从提升线出来,进入的是整形线(附图4所示)。
卷烟打码到条实施方案范本(2篇)
卷烟打码到条实施方案范本____年卷烟打码到条实施方案范文摘要:为了进一步加强对卷烟市场的监管,保护消费者的权益,打击假冒伪劣烟草产品,提高烟草行业的管理水平和效率,我国决定在____年起实施卷烟打码到条的新制度。
本文针对该新制度的实施方案进行详细阐述,包括技术标准、监管机构、实施流程、管理措施等方面内容。
第一章引言卷烟打码到条是指将每一包卷烟都进行个体化的标识码打印,并通过条形码的方式进行统一管理和追溯。
该制度的实施将有效地限制假冒伪劣烟草产品的流通,提高烟草市场的透明度。
第二章技术标准2.1 打码技术采用高分辨率激光打码技术,确保每个标识码的清晰可识别、抗变形和持续性,同时能够满足高速连续打码需求。
2.2 标识码规范标识码由二维码和条形码组成,二维码包括卷烟生产企业代码、批次号、生产日期等信息,条形码用于存储产品的序列号等信息。
2.3 打码设备标准打码设备应满足高速连续打码的要求,每分钟打码数量不低于1000包,需具备远程参数调整和管理、故障自诊断等功能。
第三章监管机构3.1 国家烟草专利局国家烟草专利局负责制定和管理卷烟打码到条的相关技术标准、管理规范及政策法规。
3.2 烟草生产企业卷烟生产企业负责购置并统一管理打码设备、生产标识码,并将相关信息上传至国家烟草专利局的数据库。
3.3 监管部门国家质检总局和工商行政管理部门作为监管部门,负责对卷烟生产过程及市场销售环节进行监督和检查。
第四章实施流程4.1 打码设备购置卷烟生产企业根据需求,购置满足标准要求的打码设备,并进行安装和调试。
4.2 码制生成国家烟草专利局负责提供码制生成软件,卷烟生产企业根据产品的不同信息生成相应的标识码。
4.3 打码生产卷烟生产企业根据产品信息和码制,在生产过程中对每一包卷烟进行打码,确保每一包卷烟都有独立的标识码。
4.4 数据上传卷烟生产企业通过打码设备将每一包卷烟的标识码信息上传至国家烟草专利局的数据库,确保信息的及时性和准确性。
整条烟喷码线及码垛机构的设计-任务书

哈工大华德学院毕业设计(论文)任务书
姓名:院(系):机电与汽车工程学院
专业:机械设计制造及其自动化班号:
任务起至日期:2013年9月20 日至2013 年12 月17 日
毕业设计(论文)题目:整条烟喷码线及码垛机构的设计
立题的目的和意义:
整条烟喷码线及装箱机构的设计分为:整条烟的输送机、打码输送机、自动装箱机部分组成。
适用于中小城市规模销售,做到喷码到户。
该机械结构只适用于常见包装方式的整条烟。
该系统的研制,就是净化烟草行业的销售市场,有效地控制假冒伪劣烟充斥市场,更有效地保护消费者的利益,做到专买专卖。
技术要求与主要内容:
根据现场的已知条件设计
1.输送机、
2.打码输送机、
3.码垛机。
进度安排:1. 9月10日毕业设计动员导师与学生见面,下达设计任务书
2. 9月20日开题答辩
3. 11月12日中期检查
4. 12月5日结题验收
5. 12月13日上交论文,导师交叉批阅论文
6. 12月17日答辩委员会分组答辩
同组设计者及分工:
独立完成
指导教师签字___________________
年月日系(教研室)主任意见:
系(教研室)主任签字___________________
年月日。
码垛机设计方案
码垛机设计方案(一)一:系统方案概述经对贵公司产品、场地的分析,技术需求、指标的详细研究和理解,为了充分满足该技术要求,对本工程我们采用方案附图所示的机器人码垛系统。
一:总体方案本机器人码垛系统,通过品质一流品牌的接近开关、按钮开关、可编程控制器等硬件和专家设计的专门控制软件相结合,实现了从客户自身的包装线出来的站立式包装袋到最后的码垛成型,均为无人的高度自动化系统。
完善的安全联锁机制,可以对设备和操作人员提供保护。
图形显示的触摸屏使整个系统操作简单,故障诊断容易,同时方便了检修和维护。
并且每套系统出厂都经过严格的系统测试,保证客户的运行安全、可靠、稳定。
本机器人码垛系统如附图1所示,由1.倒包线、2.提升线、3.整形线、4.抓取线、5.码垛机器人,五部分构成。
其各部分工作过程和其主要功能阐述如下:从称量秤、缝包机等客户末端出来的袋装产品均为站立式,通过输送机,当包装袋到达倒包线(附图2所示)时,包装袋会接触到其①倒包横梁,自身倒在②倒包板上,然后通过③防滑输送带的传送和④导向滚筒的导向,包装袋会自动调整为长度方向与流水线平行的纵向输送。
且此倒包线为高度可以调整型。
如果客户在更换产品,导致包装袋长度、称量秤输送线的高度有更改时,此倒包线可以通过其升降按钮,来驱动自身的升降电机,做高度的自动调整。
2提升线3整形线4抓取线5码垛机器人1倒包线附图2:倒包线由于产品从不同高度,客户端输送和倒包线有高度调整,为了更好统一的做码垛规划,最大发挥码垛机器人的功效和码垛能力,现增加提升线(附图3所示)将倒包线出来的包装袋提升到某一统一高度。
此提升线为配合前段的自动升降,亦增加有自动升降按钮,可以调节升降电机控制单边提升高度与前段平齐,保证后端高度不变。
附图3:提升线当产品从提升线出来,进入的是整形线(附图4所示)。
整形线顾名思义是为了将包装袋整平,使其末端码垛的剁型美观、整齐。
整形线分压包整形和震动整形两部分组成。
毕业设计码垛机控制系统设计

毕业设计(论文) 码垛机控制系统设计学号:10131203姓名:石泽旭专业:电气工程及其自动化系别:机械与电气工程系指导教师:王雷钢讲师二○一四年六月北京交通大学海滨学院毕业设计(论文)成绩评议题目:码垛机控制系统设计系别:机械与电气工程系专业:电气工程及其自动化姓名:石泽旭学号:10131203指导教师建议成绩:73评阅教师建议成绩:76答辩小组建议成绩:70总成绩:73答辩委员会主席签字:年月日北京交通大学海滨学院毕业设计(论文)任务书北京交通大学海滨学院毕业设计(论文)开题报告北京交通大学海滨学院毕业设计(论文)指导教师评阅意见北京交通大学海滨学院毕业设计(论文)评阅教师评阅意见北京交通大学海滨学院毕业设计(论文)答辩小组评议意见毕业设计(论文)诚信声明本人声明所呈交的毕业设计(论文),是本人在指导教师的指导下,独立进行研究工作所取得的成果,除了文中特别加以标注和致谢中所罗列的内容以外,毕业设计(论文)中不包含其他人已经发表或撰写过的研究成果,也不包含为获得北京交通大学海滨学院或其他教育机构的学位或证书而使用过的材料。
申请学位论文与资料若有不实之处,本人承担一切相关责任。
本人签名:日期:毕业设计(论文)使用授权书本人完全了解北京交通大学海滨学院有关保管、使用论文的规定,其中包括:①学校有权保管、并向有关部门送交学位论文的原件与复印件;②学校可以采用影印、缩印或其它复制手段复制并保存论文;③学校可允许论文被查阅或借阅;④学校可以学术交流为目的,复制赠送和交换学位论文;⑤学校可以公布学位论文的全部或部分内容。
本人签名:日期:摘要在现代的物流仓储系统中,自动化立体仓库应用日益广泛。
而码垛机是立体仓库的关键组成部分,码垛机性能的优劣对整个立体仓库的运行起到至关重要的作用,所以设计与开发自动化程度较高的码垛机控制系统成为当前立体仓库的发展趋势,开展与此有关的研究具有重要的理论和应用价值。
本文基于现代物流技术的应用和发展要求,介绍自动化立体仓库的应用及其功能和作用,结合现代科技的发展,着重研究自动化立体仓库码垛机控制系统的控制技术。
纸张码垛机构设计方案
纸张码垛机构设计方案
设计方案:
纸张码垛机构是用来将纸张堆叠成垛状的设备,主要由供纸、输送、堆垛和控制系统组成。
其设计方案如下:
1. 供纸系统:采用自动供纸装置,可以将纸张从纸张堆中抓取并传送到输送系统。
2. 输送系统:采用输送带式机构,根据设定的参数将纸张从供纸系统传送到堆垛区域。
输送带具有可调节的速度和宽度,以适应不同尺寸和厚度的纸张。
3. 堆垛系统:采用堆垛机械臂,根据设定的堆垛规则将纸张堆叠成垛状。
堆垛机械臂具有精确的定位和抓取能力,能够按照设定的排列方式将纸张码垛。
4. 控制系统:采用PLC控制器,用于控制整个纸张码垛机构
的运行。
通过设定参数,可以调整供纸速度、堆垛规则等。
控制系统还可以连接到上层系统,实现自动化生产线的协调运作。
5. 安全保护系统:在纸张码垛机构的运行过程中,应设置安全防护装置,如光电开关、急停按钮等,以确保操作人员的安全。
6. 机构结构:纸张码垛机构的机构结构应该简洁、稳定,具有足够的强度和刚度,以保证在运行过程中不会发生过度振动或形变。
7. 维护保养:设计方案中应考虑到机构的易维护性,例如设有检修门、易于拆装的部件等,以方便维修和保养工作的进行。
通过以上的设计方案,纸张码垛机构可以实现高效、准确地将纸张堆叠成垛状,提高生产效率和质量。
课程设计计算说明书(码垛机设计)
中国科学技术大学机械工程综合课程设计任务书题目:工业码垛机设计班级:0700901学生:张海滨学号:PB********指导教师:***设计目录1、设计任务分析2、总体方案论证(包括控制系统方案),绘制总体系统草图3、系统及零部分的结构设计(机电装置正常运转所必需的附件及其结构设计或选择,尺寸的确定),以及系统总体刚度和强度的计算校验。
4、运动以及动力参数的计算(动力设计及驱动源的选择、传动装置的确定和分配传动比)5、执行机构类型和执行方式的确定计算6、零件图和装配图的绘制7、典型零件工艺卡片的编写8、参考文献一、设计任务分析1、产品性能码垛机用于各种包装线末端将已装入容器的纸箱,按一定排列码放在托盘(木质)上,进行自动堆码,可堆码多层,然后推出,便于叉车运至仓库储存。
码垛机应具有一定智能,可根据不同的工艺流程要求,将不同规格的纸质或木质包装箱按预先设定的位置(可编程),整齐地堆放在托盘上。
2、码垛机的技术要求:码垛范围(长×宽×高):1200×1200×1800重复定位精度:(mm)±5.0最大工作速度:(p/min)6最大抓取重量:(kg) 20抓手形式:吸盘式3、运动要求分析:根据上述任务要求,需要码垛机的机械手能够实现空间的三维运动,并且有一定的运动精度和重复定位精度。
同时要求机械手以吸盘的方式抓取纸箱,经运动到指定位置后放开纸箱。
4、尺寸及动力分析:在总体尺寸设计时,考虑X向运动空间需要考虑传送带传送过来的货物占用的空间,所以X向横梁长度2000mm (1200mm+8000mm);Z向支撑梁高度2000mm(1800mm+200mm),横梁宽度200mm*2;Y向横梁长度1800mm(1200mm+600mm),用于叉车的活动空间。
技术要求中需要重复定位精度在±5.0mm,所以采用伺服电机作为动力源,用闭环控制系统,使用位置传感器作为位置检测装置并反馈。
烟用成品纸卷自动转运及包装系统规划与设计
烟用成品纸卷自动转运及包装系统规划与设计摘要:本文以某企业烟用成品纸卷自动转运、分拣、自动码垛、自动包装系统为例,对其建设特点和要点进行分析介绍,以该企业生产工艺为基础,结合先进的自动分拣、自动码垛、自动包装技术及设备,对其烟用成品纸卷转运、码垛及包装进行了多项创新。
本文可为其他印刷企业烟用成品纸卷自动转运及自动包装系统解决方案提供有价值的参考和理论依据。
关键词:烟用成品纸卷、自动分拣、机器人、视觉识别烟用印刷是我国发展迅猛的行业之一,尤其近年来消费者对香烟产品的外观和包装提出更高要求,精致美观的包装往往更能吸引人的眼球,从而促进消费。
市场旺盛的需求极大推动了烟用印刷纸卷产业发展。
更短的生命周期、更高的印刷质量、更精美的包装需求、更短的生产时间,也对印刷企业提出更高要求,促使企业根据市场变化需求调整企业的生产模式、调度模式、管理模式、包装模式等,从而更快地响应市场需求。
一、烟用成品纸卷转运及包装现状传统的车间烟用成品纸卷物流转运采用人工叉车或液压板车,转运过程中的信息管理及传递采用人工手写工艺卡片,烟用成品纸卷码垛及拆垛需人工完成,缠膜、打带、打码和贴码等包装工作也需人工完成,作业效率低,自动化程度低,信息管理混乱。
二、烟用成品纸卷堆码需求分析表1所为烟用成品纸卷物料堆码需求分析。
根据烟用成品纸卷物料的外形尺寸特征、重量特征、货位承载、用户配送需求等分析成品托盘堆码规则。
成品幅宽为50mm~80mm的占比超80%以上,按适应最大原则,成品托盘货位高度选择1350mm,重量不超过1000kg/托盘。
成品堆码层数、每托盘最大堆码卷数、每托盘重量、实托盘高度,如表1所示。
三、烟用成品纸卷成品包装车间流量分析按两车间末工序设备峰值产能计算。
车间1日产成品为7000卷/天,7000/90≈78托盘/天,三坐标机器人每2卷抓取1次,同批次同品规尾料1卷抓取1次(约100次/天),需抓取3550次/天;车间2日产成品日产成品为8500卷/天,8500/90≈95托盘/天,三坐标机器人每2卷抓取1次,尾盘1卷抓取1次(约110次/天),需抓取4305次/天;三坐标机器人完成日抓取托盘次数为:78+95=173次/天;三坐标机器人完成日抓取瓦楞纸片次数为:173×3=519次/天;三坐标机器人完成日抓取托盘盖板次数为:173次/天;三坐标机器人完成日抓取次数合计为:3550+4305+173+519+173=8720次/天;成品包装区日作业时间为24小时,所需三坐标机器人抓取速度为8720/24≈364次/小时。
一种码垛机设计说明书

机械专业综合实训课程设计说明书四层5x5码垛单元(机械部分)设计说明书设计题目:班级:2011级2班设计者:陈龙****:***完成日期:2014年7月日一、总体方案设计1.1 设计任务设计一码垛单元。
该码垛单元可实现每垛4层自动堆叠,层间用塑料隔板。
设计参数如下:产品总体尺寸Φ120mm×100mm,重量G1=70.4N;产品图如下,需将其5×5矩阵布局单元堆叠成四层码垛单元,层间用塑料隔板(塑料隔板厚度为5mm)。
一垛整体尺寸为600mm×600mm×420mm,重量为G=7040N,传送带高度800mm。
1.2 总体方案确定(1)码垛方式由于每一层为5×5矩阵布局单元,不能进行夹持;因此采用产品的升降来实现码垛,每码一层,让下降一个产品和塑料隔板的高度105mm,码完四层后为一垛。
(2)塑料隔板的进给和产品的转移塑料隔板的进给使一张塑料隔板上升至产品的初始高度,再将塑料隔板推动至码垛位置并延时回程(延时作用:在一层产品推过来时,限制其位置,使它准确的在码垛位置)。
产品的转移也采用执行元件推动的方式将产品推送至指定位置。
(3)执行元件的比较与选择本设计方案中需要实现的运动主要有推动产品的水平直线运动和使产品上下的直线往复运动。
可实现推动产品的水平直线运动的执行元件包括液压缸推动、气缸推动和丝杠螺母传动机构等等。
丝杠螺母传动机构主要是用来旋转运动变换为直线运动或将直线运动变换为旋转运动,丝杠螺母传动机构与步进电机或伺服电机连接可实现丝杠或螺母的行程控制,结构比较复杂;由于本方案只需推动产品到达指定位置,并不需要进行产品的行程控制,因此丝杠螺母传动机构不适用于本设计方案。
气缸与液压缸对比:气缸采用的工作介质是压缩空气,其特点是动作快,但速度不易控制,当载荷变化较大时,容易产生“爬行”或“自走”现象;而液压缸采用的工作介质是通常认为不可压缩的液压油,其特点是动作不如气缸快,但速度易于控制,当载荷变化较大时,采用措施得当,一般不会产生“爬行”和“自走”现象。
【2019年整理】小包装自动生产线的毕业设计任务书
批准日期学院系主任毕业设计(论文)任务书机电工程系机械设计制造及其自动化专业班学生一、毕业设计(论文)课题小包装自动生产线的设计二、毕业设计(论文)工作自2008年3月J7 日起至2008年6月里Q日止三、 ________________________________________________________________ 毕业设计(论文)进行地点 ___________________________________________________四、毕业设计(论文)的内容要求:(一)设计条件::1、整条生产线由两台灌装机(36灌/分钟)、两台旋盖机、一台热封机、一台喷码机、一台包装机(48灌/分钟)、码垛机一台及其配套设备组成:2、车问平•面图一张;(二)设计内容及要求:1、查阅有关参考文献,按要求写出开题报告;2、对国内外润滑油小包装生产线情况进行综述;3、确定整个小包装生产线的设计方案,并绘制布置方案图;4、对设计方案中所提出的输送机、下滑梯及其他动力元件进行选择、论证及设计计算,并绘制输送机及传送带的装配图与零件图若十张; ______________________5、确定具体控制方案,对检测装置元件与控制装置元件进行选择、论证及设计;6、绘制电路控制系统图(外部接线图和梯形图);____________________________7、编写设计说明书(不少于3万字、有英文摘要、计算机打印输出): _________8、翻译专业文献(不少于5000英文单词)。
________________________________(三)主要参考资料1、《运输机械设计选用手册》编辑委员编,《运输机械设计选用手册》(上、下).北京:化学工业出版社2、戴广平•编著,《电动机变频器与电力拖动》,北京:中国石化出版社_________3、王义行主编,输送链与特种链工程应用手册,北京:机械工业出版社__________4、钟肇新、彭侃编,可编程控制器原理及应用,广州:华南理工大学出版社5、刘建勋主编,电动滚筒设计与选用手册,北京:化学工业出版社,20006、胡旭晓、杨克己,PLC在输送控制系统中的应用[J].机电工程,2000,17(4)教研室负责人 ___________________________________________指导教师 _______________________________________________接受设计论文任务开始执行日期年月日学生签名 ______________________________________________。