于IEC61131-3的控制软件平台的设计与实现.
基于IEC61131_3的新型PLC系统的设计

,
P LC
互不兼 容 这
P LC
,
以M
.
和足 够 的
,
FL AS H
/ O R M 刀D D
,
、
A
十
转换
.
给实 际使 用 带 来很 大 不 便 影 响 了
,
的推 广
.
器 等 所 以 系 统硬 件 可 以 简 化 成
,
:
c
U P
接口
和应 用 ; 也 使 得 教 师 在 教 学 中 无 所 适 从 1 9 9 2 E) E 6 3 年 国际 电工 委 员 会 ( I c 颁 布 了 I C 1 1
, 、
.
自成 体 系 尤 其是 编程 调 试 环 境 各 不相 同 同是
L 梯形 图 和 I 指 令语 言 各公 司 的组 态 寻 址 语
、
控制 器 采 用
的
C y孚 l a l
公 司 最 近 推 出 的 新一 代 功能
,
强 大 的 单 片机
C8 0 5 1
该 单 片机 内部 集成 了 4 k
法结 构 并 不 一 致 使 得 各 种
,
,
必 考虑 硬 件 的具体 细 节 这一 部分 函 数包 括显
.
: 9 收稿 日期 2 朋 3 一 n 一 1 * 北京 市 教 委 重 点 资 助 项 目(Z o Z k m 6 ) j : : 第 一作 者简 介 黄 江 海 硕 士研 究 生 主要 研 究方 向 PLC 在模糊控制 中的 应 用
.
,
在进 行 上 述 的 语 法 分
,
析和 语 义 分 析之后
中间形 式 语 言
,
,
编译程 序将 源 程 序 翻 译成
IEC61131-3工控编程语言国际标准及其应用

摘要针对当前控制系统编程语言的流行趋势,从基本编程元素和编程语言两个方面详细介绍了标准IEC61131-3的内容。
并且以浙大中自SunyTech工业控制应用软件平台为背景,对标准具体内容的应用作了针对性的阐述,充分展现了IEC61131-3标准在控制系统软件编程中的作用。
关键词IEC61131-3;软件模型;编程语言;工控编程软件;PLC;控制系统1 引言IEC(InternationalElectrotechnicalCommission)61131-3是第一个为工业自动化控制系统的软件设计提供标准化编程语言的国际标准。
该标准将现代软件的概念和现代软件工程的机制与传统的PLC编程语言成功地结合,又对各种工业控制系统的编程语言、软件设计的概念和软件模型等进行了标准化,适应了当今世界软件、工业控制系统的发展方向,是一种非常先进的设计技术。
2标准的主要内容[1][2]IEC61131-3将标准分为两个部分:公共元素和编程语言。
IEC61131-3标准的层次和结构如图1所示。
图1IEC61131-3标准的结构图公共元素部分规范了数据类型、变量的定义,给出了软件模型,并引入配置(Configuration)、资源(Resources)、任务(Tasks)和程序(Program)的概念、程序组织单元POU(PorgramOrganizitionUnit)和顺序功能图SFC(SequentialFunctionChart)等。
IEC61131-3标准共规定了4种编程语言,其中两种图形化语言,两种文本化语言。
图形化语言有梯形图LD(LadderDiagram),功能块图FBD(FunctionBlockDiagram);文本化语言有指令表IL(InstructionList)和结构文本ST(StructuredText)。
2.1 基本编程概念和公共元素1)软件模型IEC61131-3标准的软件模型如图2所示。
基于IEC61131-3标准的可编程控制器的研究与实现
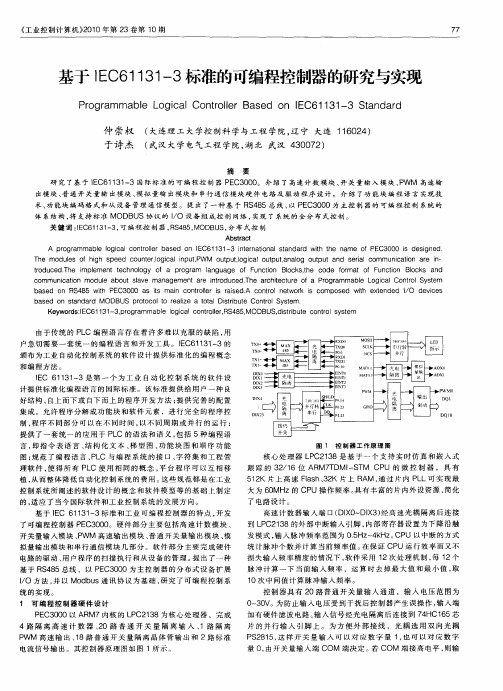
基于 IC 13 — 标准的可编程控制器的研究与实现 E 6 1 3 1
Pr g a o r mma l o c lCo tol r a e n E be L gia n r l B s d o I C61 — t n a d e 31 3 S a d r 1
关 键 词 : C6 1 1 3, 编 程控 制 器 , S 8 MODB I 13 — 可 E R 4 5, US, 布式 控 制 分
Ab ta t sr c
A prgr m mabl lgial o r l b e o I o a e o c c nt er as d n EC611 ol 31—3 ner a ina san r t h n it n t o l t da d wi t e ame f h o PEC30 0 s 0 i de i e sgn d T m o es f gh he dul o hi sp d ee co t , giali tP M oupu , ca oupu ,n og unerl c npu, W o t tl ogi l t ta al oupu an se i c t t d r al omm u c in niat ar i— o e n to ce Th i pl rdu d. e m emen t ch ol y f pr r m l gu ge f un t Bl k t e o f m a o Fu c i Blck an t e n og o a og a an a o F c i on oc s, c de or t f h nt on o s d c omm u c in m odue bou slv man gemen e n rdu d Th a c t t e f P o a mabl L ca Con r Sy t niat o l a t ae a tar ito ce e r hi ur o a r gr m ec e ogi l tol sem ba ed n s o RS4 t PEC30 0 85 wi h 0 as t mai co tol r s aied. c n r newo k s o po ed i s n n r l i r s e A o tol t r i c m s wi e t de IO de ie t h xen d / vc s ba e on t d d sd san ar MODBUS r t olt r l e o a Diti t n r l y t p ooc o eai a tt l s r e Co to S sem z bu Ke wo d lC61 31 y r s: E -3. o a mabl l c n r l , 1 prgr m e ogialco tol RS48 MO DBUS, sr t c tols se er 5. diti e onr y tm bu
程标准--IEC 61131-3的制定和推广应用,在工业PC上以软件技术
一种基于工业PC的软PLC控制系统出处:PLCopen China for efficiency in automation(PLCopen 中国组织)首先介绍了基于PC的控制系统的发展状况以及软PLC技术的概念和组成结构。
然后详细地叙述了基于工业PC的软PLC的软、硬件实现方案,最后给出了应用实例。
引言基于PC的控制系统是国际上继PLC和DCS之后推出的工业控制系统。
目前在工业控制领域,基于PC的控制系统得到日益广泛的应用。
同时由于计算机软、硬件技术的迅速发展以及工控领域国际编程标准--IEC 61131-3的制定和推广应用,在工业PC上以软件技术实现PLC的功能,即软PLC技术,成为一项新兴的技术。
1、基于PC的软PLC控制系统的发展现状1.1 IEC 61131-3国际编程标准[1]IEC 61131国际标准的制订是软PLC技术发展的一个重要基础。
为了规范工业控制领域的编程语言,20世纪90年代初,IEC(国际电工委员会)颁布了IEC 61131国际标准。
该标准共分八个部分,依次包括:基本概念、硬件装置和测试、编程语言标准、用户指南、通信服务规范、现场总线通信(未公布)、模糊控制语言和编程实施方针。
其中IEC 61131-3是PLC编程语言标准,它详细地说明了句法、语义和5种编程语言:指令表(Instruction),结构化文本(Structured Text),顺序功能图(Sequential Function Diagram),梯形图(Ladder Diagram),功能块图(Function Block Diagram)。
在这五种编程语言中,指令表和结构化文本是文本语言,易于实现一些复杂的算法;顺序功能图、梯形图和功能块图是图形语言,它们则擅长处理逻辑控制。
同时该标准还允许在同一项目中,使用多种语言进行混合编程,而且支持POU(程序组织单元)的重复使用,为不同知识背景的编程人员提供了方便。
基于IEC61131-3的IL编译器的设计与实现

郭 书杰 , 马 跃 王 品 ,
(.中国科 学院 沈 阳计 算技术研 究所 ,辽 宁 沈 阳 107;2 1 111 .中国科 学院研 究生 院 ,北京 104) 009
摘 要: 为解 决 目前 国 内各厂 家P Crormmall ic n ol ) L (rga beo c o t l r产品 的编 程语 言互不 兼容 , ) g r e 使得 不 同系列产 品的P C编译 器 L
可 重 用 性 很 低 的 问题 , 计 实现 了基 于 IC 13 - 标 准 的 I( s ut ni) 言 编 译 器 。 先 设 计 了编 译 器 的 逻 辑 结 构 , 助 设 E 6 113 L i t ci lt n r o s语 首 借
Fe 和 G UB sn工具 , 照标准 I 言的词 法、 l x N i o 按 L语 语法要 求, 设计 并实现 了词法 、 法分析 器, 语 简述 了生成 目标代码 具体 实现
IEC611313标准及其实现

IEC61131-3标准及其实现IEC61131-3标准的基本概念和定义IEC61131-3对下述三个方面进行了描述和定义:1、块的概念,2、PLC的配置,3、编程系统应具备的基本功能。
一、块的概念由POU(Program Organization Unit)构成的程序和项目称之为块(Blocks),POU与传统PLC世界中的程序块、组织块、顺序快、功能块相对应。
IEC61131-3标准的一个非常重要的目的就是限制块的种类及其隐含的意义,以便统一和简化它们的用法。
为此,标准定义了三种类型的POU,分别如下:POU类型意义程序(PROG)主程序,包括指定的I/O、全局变量和存取路径功能块(FB)拥有输入/输出变量的块,是最常用的POU类型函数(FUN)带有函数值的块,作为PLC基本操作集的扩展三种POU的区别在于:函数(FUN)函数POU可以指定参数,但没有静态变量也就是没有存储空间,在用相同的输入参数调用函数时总是返回相同的结果。
功能块(FB)功能块POU即可以指定参数,也有静态变量,在用相同的参数调用功能块时,返回值取决于内部变量和外部变量,并能将内部变量保持到下一个执行周期。
程序(PROG)此类POU代表“主程序”,整个程序的所有变量(包括指定的物理地址)都应该在此POU(或资源、配置)中声明,其他方面与功能块POU类似。
POU 是个封装的单元,可以独立地编译,并作为其他程序的部件,经编译的POU可以连接在一起组成完整的程序。
POU 的名字在整个项目中是唯一的、全局的。
局部子程序在IEC61131-3中是禁止的,经编程之后的POU,其名字和调用接口对项目中其他所有的POU是已知的。
POU 的这种独立性大大方便了自动化任务的模块化以及可以重复使用已经获得良好测试和执行的软件单元。
编写PLC程序实际上就是构造功能块(FB)和程序块。
大多数情况,PLC已经预先构造和测试好了大量的功能块(如:定时器和计数器),用户只要将系统提供的功能块按照逻辑要求组织成程序即可。
基于IEC61131-3的控制算法编辑器实现
2 Istt f d r C nrl ein iv r t Ha gh u3 0 2 ) .n tue en o t , jagUnn es y n zo 10 7 i o Mo o Zh i, ] sr c]T i at l a a z stepo rmmal cnrl ’ rga n tn adIC6 3sf r dld s n n a zscnrl Ab tat hs rc nl e h rga ie y be o t l po rmmigsad r E 11 ot emo e, ei sa dr l e o t om 13 — wa g ei o
维普资讯 http:/
第 3 卷 第 l 期 2 8
1L 2 1 3 o
・
计
算
机
工
程
20 年 9 06 月
Se e be 00 pt m r2 6
№
l 8
Co p trEn i e rn m u e gn e i g
开发 研 究与设 计技 术 ・
[ yw r s E 6 3 ・: o t l loi me i rCo i rVr a mahn Ke o d ]IC 1 13 C nr g rh dt ; mpl ; iu l c ie 1 oa t o e t
19 9 3年 国际电工委 员会( C) I 正式颁布 了可编程控制器 E 的国际标准 IC 13 , E 6 1 1 其中的第 3部分 为关于编程语言的标
文章编号:1 o 48o6I l3 I 文献标识码;A 0 _ 2(o)—I8—l o 2 8 2 3
中囤 号: P1 分类 T31
基于 I C 13 . E 6 1 13的控制 算法编辑 器实现
孔亚广 ,王文 海
基于IEC61131_3的PAS上位机软件的设计与实现_杨学喜
《工业控制计算机》2010年第23卷第3期PAS 控制系统是重庆川仪总厂有限公司开发的一种基于客户机/服务器结构的分布式控制系统(DCS ),本文以IEC61131-3编程语言规范为基础,在VC++6.0平台下设计开发了PAS 控制系统上位机软件PASTOOL-Config 。
该软件由功能块算法库、控制算法编辑、编译和仿真等模块组成,实现了对控制系统的程序编辑、运行方式控制、设置和控制策略仿真调试等操作。
1IEC61131-3的控制系统上位机软件开发1.1IEC61131-3的控制系统上位机软件结构IEC61131-3的控制系统上位机软件选择了符合IEC61131-3的编程语言———功能块图(FBD )。
由于在工业控制中的特殊要求,控制系统除了符合IEC61131-3标准的各种规定还应该提供专有的组织方式和运行模式,软件模型总体结构如图1所示,由工程管理器、FBD 编辑环境、功能块库及实例化程序、编译模块、仿真调试程序这几大模块构成。
以控制算法编辑器为主体、为用户提供标准FBD 编程语言和友好的图形化编程界面,并集成编译和仿真模块,提供程序编译、数据类型检查、离线仿真及组态等功能。
1.2功能块算法库开发在PAS 上位机软件中功能块算法的代码是以静态链接库的形式提供的,功能块参数随着功能块实体的产生而产生。
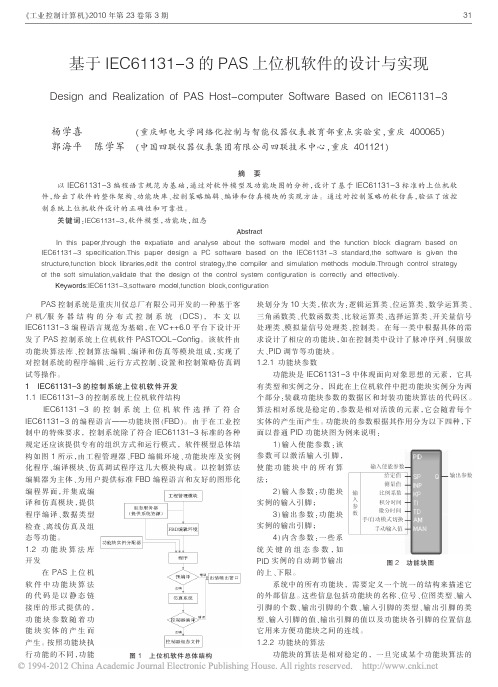
按照功能块执行功能的不同,功能块划分为10大类,依次为:逻辑运算类、位运算类、数学运算类、三角函数类、代数函数类、比较运算类、选择运算类、开关量信号处理类、模拟量信号处理类、控制类。
在每一类中根据具体的需求设计了相应的功能块,如在控制类中设计了脉冲序列、伺服放大、PID 调节等功能块。
1.2.1功能块参数功能块是IEC61131-3中体现面向对象思想的元素,它具有类型和实例之分,因此在上位机软件中把功能块实例分为两个部分:装载功能块参数的数据区和封装功能块算法的代码区。
算法相对系统是稳定的,参数是相对活泼的元素,它会随着每个实体的产生而产生。
基于IEC61131-3的编程系统的设计和实现

工 具栏 、导航 栏 、观察 窗 口 、编辑 画面 、输 出窗 口 6 个部 分 。如 图 3 示就 是其 中的导航 栏 ,有 3 所 个切 换 子 窗 口 ,分 别 显示工 程 中 的程序 、算法块 、数据
库 变量 等信 息 。在 I C 1 3 - 中 ,有两种 不 同运 行 E 6 l l3
一
的 提高 , 可编程 控制 器 的应用 也得到 了迅 猛的发 展 。
由于传统 的 P C 程语 言存 在 着许 多难 以克服 的缺 L 编
陷 ,用户 急切 的需 要一 套统 一 的编 程 语言 和开 发工 具 。I C 1 3 — E 6 1 1 3的颁布 为工 业 自动化 控制 系统 的软
工 程 管理 器
全局及 一
一 f
一
网络变量
函 数, 能 块 库 功
数 据 库 编
一
算 法 编 辑 器
辑器
( 五种编程语言)
准 毒
_ 。
… _ l I
芟 忤
仿 真 调 试 、 ^ 译 器 ~ … 一 一一 一 编
一 线 监控 在 一一
属性 的任 务 ,周期 执行 和 中断触 发 。在 算法编 辑器
中 ,通过 在创 建 控制程 序 时选择 导 航栏下 的 不 同的 程 序分 支加 以描 述 。 在 I C 1 3 - 标 准 中定义 了3 E 6 l l3 种程 序组 织单 元
关键词 :IC6 1 1 3 E 1 3 — ;工业控 制 ;编程 系统 ;P C编程 ;功 能块 L
0 引言
目前 ,由于工 业生 产对 自动 化程 度 的要求 不断
基于IEC61131-3标准的PLC编辑模块设计与实现
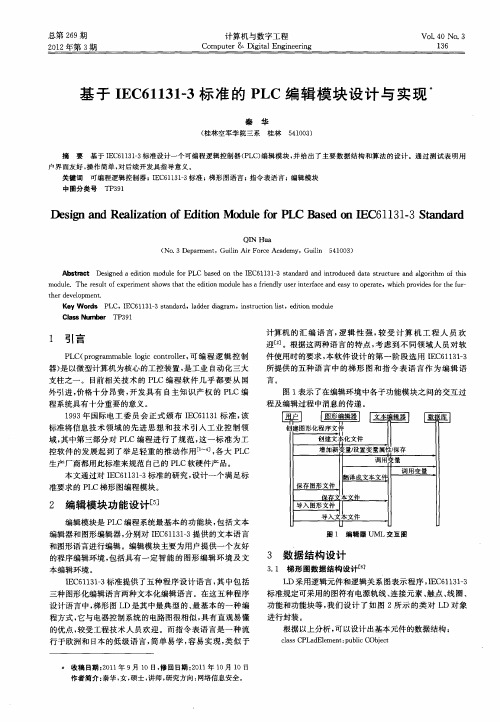
图 1表示了在 编辑 环境 中各 子功 能模 块之问的交互过
程及编辑过程中消息的传递。
域 , 中第 三部分 对 P C编程 进行 了规范 , 一标 准为工 其 L 这
控软件 的发展起 到 了举 足轻重 的推动作用 _ , 1 各大 P C ] L 生产厂商都用此标准来规范 自己的 P C软硬件产品 。 L 本文通过对 I C 13 — E 6 1 13标准的研 究 , 设计 一个满 足标
行于欧洲和 日本的低级语 言 , 简单 易学 , 容易实 现 , 似 于 类
根据以上分 析 , 以设计出基本元件的数据 结构 : 可
c s P aE e n: u a c
m o ue Th e uto x rme ts wst a h dt nm o ueh safin l e efc n ay t p rt d l. er s l fe pei n ho h ttee ii d l a re dyusri raea de s oo e ae,whc r vde o h u — o nt ih p o i sf rt ef r
中图 分 类 号 T 31 P 9
De in a d Re l a in o d t n M o ue frP C a e n I C6 1 1 3 S a d r sg n a i t fE ii d l o L B s d o E 1 3 - t n a d z o o
L D采用逻辑元 件和逻辑关 系图表示程序 , C 1 3- I 6 1 13 E
标 准规 定可采用 的图符有 电源轨线 、 连接元素 、 触点 、 圈、 线 功能和功能块等 , 我们 设计 了如 图 2所 示 的类对 L D对象 进行封装 。
程方式 , 它与 电器控制系统 的电路图很相似 , 具有直观易懂 的优点 , 较受工程技术 人员 欢迎 。而 指令表语 言是一 种流
运用IEC 61131-3实现工控软件的结构化、分解和复用
满 足 来 启 动 不 同程 序 段 的 执 行 顺 序 ,而 执行 条 件都 是 显性 条件 ,不
购 ) 德 国K 、 W公 司 的M L I R G、 U T 0 P 法 国Cp l ihSr tn 德 国3 公 o apw t ta o 、 S
工程机械和南车集团的高速列车的控
制器 都选用 了K w的 编 程 平 台 。
作 者简 介
彭瑜 男 教授级高工,中国自动化 学会理事 ,中国自动化学会仪表和装
这些编程软件平 台不具体地依赖
于 特 定 的 硬 件 产 品 。 为 数 众 多 的
P C、 D S S A A 产 厂 商 ( 括 L C 和 C D 生 包
的动作 ,控制程序就在这样有条不紊
的 氛 围 中 完 成 。在 P C 件 开 发 生 命 L软 周 期 的初 始 关 键 阶段 , S C 适 合 于 F最 按 软 件 工 程 的方 法 进 行 开 发 , 而 其 它
P LC程 序 时 , 编程 人 员如 果 用 到
SC F ,也 只 不 过 把 它 仅 仅 作 为 一 种 编 制顺控程序 的工具,就是在讲 解I C E 6 113 1 3— 编程 语 言 国际 标 准 的时侯 ,也
没 有 突 出S C 结 构 化 特 性 ,使 人 们 F的
也开 发了一些 自用 的基于 I C E 的编程
软 件 。不 过 我 国 还 没有 出现 商 业 化 的 IC 6 1 2 — 的 编程 软件 平 台 。近 些 E 1 3 13 年 来 ,在 机 电设 备 的 嵌入 式 控 制 器 中
基于IEC61131-3标准的PLC梯形图检查模块设计与实现

该 检 查 模 块 能 够 正 确 找 出 已 编 写 程 序 的语 法 和 一些 简单 的逻 辑错 误 , 后 续 开 发 具 有 指 导 意 义 。 对 关键词 : 查模块 检 梯 形 图 可 编 程 逻 辑 控 制 器
文献标识码 : A
I C 1 3— E 6 1 13标 准
文章 编 号 : 0 2 7 7 ( 0 0 0 -5 0 0 10 -3 8 2 l )40 0—3
准 , 标准 将信 息技 术 领 域 的 先进 思 想 和 技术 引 入 该 工业控 制 领域 , 中第 三部 分对 P C编程 进 行 了规 其 L
范 , 一 标 准 为 工 控 软 件 的 发 展 起 到 了 举 足 轻 重 的 这
序 的语 法和 一些 简单 的逻 辑 错误 , 出 出错 信 息 引 给 导 用户 做 出修 改 [ , 2 以提 高软 件 的易用性 , ] 保证 进行 翻译或 编译 的程 序是正 确 的 。图 1为用 户使 用该检 查 模块 对程 序进 行检查 时 消息传 递 的过程 。
De i n a a i a i n o d r sg nd Re lz to f La de Di g a a r m Ch c ng e ki M o u e f r PLC s d o EC61 — t n r d l o Ba e n I 1 1 3 S a da d 3
中 图 法 分 类 号 : P 1. T 315
Ab t a t A a a c c ng m o ul or PLC s n I sr c : digr m he ki d e f ba e o EC6 31 3 s a a d i e i ne n 1 — t nd r S d sg d a d 1
基于IEC 61131-3标准的PLC仿真系统的研究与设计的开题报告
基于IEC 61131-3标准的PLC仿真系统的研究与设计的开题报告一、研究背景及意义随着工业自动化技术的不断发展,工业控制系统的需求也日益增加。
PLC(可编程逻辑控制器)已成为工业自动化控制系统中最常见的控制器之一。
PLC与传统控制器相比,具有可编程、安全可靠、结构简单、易维护等优点。
而PLC的可编程特性,则是其最大的优势之一。
IEC 61131-3标准作为PLC编程的国际标准,对于提高PLC编程质量、加快PLC编程工作的效率、提高工业自动化控制系统的安全性等方面,都具有非常重要的意义。
同时,为提高全国各高校在IEC 61131-3标准和PLC仿真方面的教学水平和研究能力,开发基于IEC 61131-3标准的PLC仿真系统,将会给工业自动化控制系统的教学及研究带来一定的帮助。
二、研究的目标和内容该研究的目标是设计和开发一个基于IEC 61131-3标准的PLC仿真系统,并研究其原理和实现方法。
该系统将具有以下特点:1. 遵循IEC 61131-3标准,支持标准的PLC编程语言,包括Ladder 图、功能块图、结构化文本、序列功能图和函数图等。
2. 提供完整的仿真环境,支持仿真环境的搭建和控制。
仿真环境包括PLC CPU、IO设备、通讯设备等。
3. 可以读取和修改PLC程序,并实时更新仿真结果。
4. 提供实时监控和调试工具,支持单步调试、断点调试等。
5. 可以保存和加载仿真环境和仿真结果。
研究内容包括:1. IEC 61131-3标准的介绍和分析。
深入研究其编程语言、数据类型、程序组织形式等方面,并分析其在PLC编程中的应用。
2. PLC仿真系统的设计和开发。
基于IEC 61131-3标准,设计和开发一个完整的PLC仿真系统。
3. 系统测试和分析。
对开发的PLC仿真系统进行测试和分析,评估其性能和可靠性。
三、研究方法和步骤研究方法包括文献调研、理论分析和实验研究等。
主要步骤包括:1. 对IEC 61131-3标准进行深入的调研和分析,熟悉其编程语言、数据类型、程序组织形式等方面的内容。
和利时IEC 61131-3编程软件平台

和利时IEC 61131-3编程软件平台张海伟【期刊名称】《自动化博览》【年(卷),期】2016(000)006【总页数】3页(P42-44)【作者】张海伟【作者单位】北京和利时系统工程有限公司【正文语种】中文IEC 61131-3是旨在规范可编程控制器(Programmable Controller,简称PLC)编程语言的国际标准,经过十多年的发展和完善,已被广大PLC使用者和生产厂商所认可和支持。
和利时自主化的可编程软件平台从设计之初就遵循IEC 61131-3标准,是和利时各种可编程控制器统一的软件解决方案。
目前和利时自主化的IEC 61131-3编程软件平台已经成功应用于以下产品:和利时自主的小型与大型可编程控制器、运动控制器等。
这些产品已经应用在核电、火电、化工、轨道交通、煤矿、运动控制等业务领域。
和利时在总结多年应用经验和国内外产品的主要特点后,从2005年开始进行自主开发,推出了IEC 61131-3编程软件平台AutoThink。
和利时IEC 61131-3编程软件平台AutoThink具有自主知识产权,遵循IEC61131-3标准。
图1为和利时自主化的IEC 61131-3编程软件平台主界面图,同其他的集成开发环境相类似,左边是工程管理树,用户可以通过工程管理树管理整个用户工程;中间是用户逻辑、数据和设备组态区域;右边是基本函数、功能块算法以及支持的设备库,最下方是信息输出窗口。
本部分从程序逻辑组态方式、设备组态方式、程序调试方式、程序的编译执行方式、用户知识成果保护方式、运动控制功能支持等主要方面介绍和利时IEC 61131-3编程软件平台主要特点。
2.1 程序逻辑组态方式(1)任务的调度机制• 多任务:包括周期触发、事件触发和自由运行类型任务。
• 优先级:高优先级抢占低优先级任务,同一优先级时间片轮转调度。
(2)多种编程语言的支持支持IEC61131-3描述的5种编程语言中的4种:• 梯形图LD;• 功能块图FBD;• 结构化文本ST;• 顺序功能图SFC。
《基于IEC61131-3标准软PLC开发系统的设计与实现》

《基于IEC61131-3标准软PLC开发系统的设计与实现》一、引言随着工业自动化程度的不断提高,可编程逻辑控制器(PLC)作为工业控制的核心设备,其开发和应用的范围越来越广泛。
为了满足不同工业应用的需求,软PLC(Software Programmable Logic Controller)技术应运而生。
软PLC系统基于IEC61131-3标准进行开发,具有高度的灵活性和可扩展性。
本文将详细介绍基于IEC61131-3标准的软PLC开发系统的设计与实现。
二、系统设计1. 系统架构设计基于IEC61131-3标准的软PLC开发系统采用模块化设计,主要包括以下几个模块:用户界面模块、编程模块、仿真模块、通信模块和执行模块。
各模块之间通过总线方式进行连接,实现数据的传输和交换。
2. 编程语言选择根据IEC61131-3标准,软PLC支持多种编程语言,包括梯形图(Ladder Diagram)、功能块图(Function Block Diagram)、结构化控制语言(SCL)等。
在开发过程中,根据实际需求选择合适的编程语言,以提高系统的开发效率和可靠性。
三、主要功能模块设计与实现1. 用户界面模块用户界面模块是软PLC系统与用户进行交互的窗口,主要包括登录界面、主界面、编程界面和监控界面等。
该模块采用图形化界面设计,提供友好的操作界面,方便用户进行编程和监控。
2. 编程模块编程模块是软PLC系统的核心模块,负责根据用户编写的程序进行逻辑运算和控制。
该模块采用IEC61131-3标准的编程语言进行编程,支持多种编程方式,如离线编程、在线编程等。
在编程过程中,系统提供丰富的函数库和工具库,方便用户进行编程和调试。
3. 仿真模块仿真模块用于对用户编写的程序进行仿真测试,以便在真实环境运行前验证程序的正确性。
该模块采用虚拟硬件环境进行仿真测试,可以模拟实际工业环境的各种情况,如传感器信号、执行器信号等。
通过仿真测试,可以减少实际运行中的错误和故障。
利用IEC61131-3和PLCopen的运动控制功能块来创建独立于硬件的可再用运动控制应用程序

利用IEC61131-3和PLCopen的运动控制功能块来创建独立于硬件的可再用运动控制应用程序利用IEC61131-3和PLCopen的运动控制功能块来创建独立于硬件的可再用运动控制应用程序摘要运动集成及自动化解决方案的可维护性和连通性这些问题已经出现,因此需要建立标准。
PLCopen建立了这样的标准。
编程语言的标准是来协调各工作平台间运动控制功能性的访问。
这样,生成的应用程序在工作平台间更独立于硬件而且可再度利用。
PLCopen运动控制功能块提供的标准以IEC61131-3功能块概念为基础。
随着功能性和接口的标准化及在多个平台上执行,建立了编程标准,并在工业领域被广泛支持。
由于封装隐藏了数据,此标准可用于不同结构,适用的控制从集中型到分散型或从集成型到网络型。
它不是为某个应用程序特别设计的,而是可以作为在不同领域中正进行定义的基础层。
正因为如此,它对现有和将来的技术都是开放的。
介绍在很多情形中运动控制系统的用户支持多个应用层。
例如,一个包装机供应商可支持三个不同层次:低成本、中等层次和高性能/高成本。
使用不同的运动控制系统可解决速度和精确度的不同需求。
不幸的是,运动控制市场显示各种系统/解决方案的不兼容。
实际上,这意味着结构和用于开发、安装和维护的软件工具的各个层次存在很大的差异。
这种不兼容性带来了相当大的费用:使用不同的实现设备发生混乱,工程变得困难,培训费用增加,软件在各平台间不能再次使用。
标准化自然减少了以上提到的消极要素。
标准化不仅适用于IEC61131-3国际标准这样的编程语言中,而且适用于不同的运动控制解决方案(如分散型、集成型或集中型)的接口。
这种标准化可有效地用于定义可再用部件的资料库。
这样,编程更独立于硬件,应用软件的可再用性增加,培训和维护的费用减少,不同控制解决方案间的应用程序可伸缩。
任务工作小组的目标机器制造业的主要供应商请求PLCopen帮助解决不兼容的问题,因此组建了运动控制的任务工作小组。
基于IEC61131-3的PAS上位机软件的设计与实现

基于IEC61131-3的PAS上位机软件的设计与实现
杨学喜;郭海平;陈学军
【期刊名称】《工业控制计算机》
【年(卷),期】2010(023)003
【摘要】以IEC61131-3编程语言规范为基础,通过对软件模型及功能块图的分析,设计了基于IEC61131-3标准的上位机软件,给出了软件的整体架构、功能块库、控制策略编辑、编译和仿真模块的实现方法.通过对控制策略的软仿真,验证了该控制系统上位机软件设计的正确性和可靠性.
【总页数】3页(P31-32,35)
【作者】杨学喜;郭海平;陈学军
【作者单位】重庆邮电大学网络化控制与智能仪器仪表教育部重点实验室,重庆,400065;中国四联仪器仪表集团有限公司四联技术中心,重庆,401121;中国四联仪器仪表集团有限公司四联技术中心,重庆,401121
【正文语种】中文
【相关文献】
1.基于IEC61131-3的IL编译器的设计与实现 [J], 郭书杰;马跃;王品
2.基于IEC61131-3标准的PLC编辑模块设计与实现 [J], 秦华
3.基于IEC61131-3标准的ST转化为IL语言的设计与实现 [J], 张玉姣;卓怀忠;沈开奎;郭虎锋;潘景霞
4.基于IEC61131-3标准的PLC梯形图检查模块设计与实现 [J], 秦华;宋蓓;廖瑞
5.基于QT的Mifare IC卡读卡器上位机软件设计与实现 [J], 徐敬
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
科技信息1.引言基于IEC61131-3标准PLC具有通用性好、兼容性高、价格低廉、编程方便、易于与网络相连等优点,欧美等西方国家都把基于IEC61131-3标准PLC作为一个重点对象进行研究开发。
嵌入式PLC是架构在嵌入式系统上的PLC系统,具有非常广泛的应用前景,在自动化领域采用基于嵌入式PLC系统来代替传统硬PLC产品已经成为一个趋势。
本文采用德国3S公司的CoDeSys构架PLC系统,对研究嵌入式PLC系统具有重要的实践意义。
2.IEC61131-3编程语言简介IEC61131-3编程语言标准是第一个为工业控制系统提供标准化编程语言的国际标准。
该标准针对工业控制系统所阐述的软件设计概念、模型等,适应当今世界软件、工业控制系统的发展方向,是一种非常先进的设计技术。
它极大地推动了工业控制系统软件设计的发展,对现场总线设备的软件设计业产生了很大的影响。
符合IEC61131-3标准的软件系统是一个结构完美、可重复使用、可维护的工业控制系统软件。
它不仅能应用于可编程控制器,而且能应用于流程控制和制造过程软件中,因此,它是新型的,先进的工业控制编程系统。
2.1IEC61131-3标准编程语言的主要内容IEC61131-3编程语言标准分为公用元素和编程语言两部分。
公用元素部分除了说明各种编程语言中使用的字符集、标识符、关键字等外,还定义了数据的外部表示、数据类型、变量和程序组织单元等,并对顺序功能图的基本元素等进行了定义。
与传统的可编程控制器编程语言不同,在公共元素中,编程语言标准还定义了配置、资源、任务和存取路径等基本概念。
IEC61131-3的编程语言部分还定义了两大类编程语言:文本化编程语言和图形化编程语言。
文本化编程语言包括指令表编程语言(IL)和结构化文本编程语言(ST),图形化编程语言包括梯形图编程语言(LD)和功能图块编程语言(FBD)。
在标准中定义的顺序功能图(SFC)既没有归入文本化编程语言,也没有归入图形化编程语言,它被作为公共元素予以定义。
这表示顺序功能图既可用于文本化编程语言,也可用于图形化编程语言。
如下图描述它们的关系。
图1IEC61131-3标准的层次结构IEC61131-3标准的公用元素中还包含语言元素,如标识符、分界符、关键字等。
标准将顺序功能表图作为公共元素,因为它的动作和转换条件可以用标准规定的其他四种编程语言来编程。
2.2IEC61131-3标准编程语言的发展IEC61131-3标准被市场广泛接受和支持之后,得到了良好的维护和发展,在应用过程中发现的缺陷逐步被改进;同时为了使用技术的进步和市场要求的环境,IEC61131-3标准也进行了适当的修订。
IEC61131-3标准的第三次修订将于IEC61499标准相协调。
3.国内外基于IEC61131-3标准编程系统现状3.1国内现状近些年来,国内致力于自主知识产权的IEC61131-3编程系统开发的有亚控科技、浙大中自、大连理工大学计控研究所以及北京凯迪恩自动控制技术公司等,其中亚控科技的KingAct已经投入使用,浙大中自的SunyIEC实现了IEC61131-3标准中的五种控制语言,是目前国内自行开发并拥有自主知识产权的编程系统达到了较高的技术水平,极大地促进和加快了国内自动控制设备的发展。
3.2国外现状国外商品化工业控制软件的编程系统平台模式是专业化、集中化,即由为数不多的且专门从事功课控制基础软件的小型企业承担,他们向工控界提供一类不具体依赖于特定PLC或其他控制系统硬件产品的开放式编程软件包,如加拿大ICSTriplex公司的IsaGRAF,德国KW公司的MULTIPROG,德国Infoteam公司的OpenPCS,德国3S公司的CoDeSys。
许多的工业控制设备厂商(包括西门子、横河电机、欧姆龙、三菱电机、ABB公司等)都购买了这些商品化基础软件的使用权,并在此基础上进行工作量不大的二次开发,或在此基础上将其高附加值的诀窍和控制算法嵌入其中。
4.基于IEC61131-3标准的嵌入式PLC系统的构成本系统硬件设备包括x86PC平台,奔腾(pentium)2处理器,标准PCI插槽板,IO板,AD板,网线,路由器,人机界面,驱动器,驱动设备(自选)。
软件系统采用德国3S公司的CoDeSys编译环境,支持五种控制语言的编程,符合IEC61131-3标准。
整个PLC系统由编译系统和运行系统、人机界面、外围设备以及驱动设备五部分组成。
以运行于Linux系统之上的CoDeSys运行系统为核心,进行数据采集,传输。
其中人机界面、驱动器、和其他的设备是通过Internet进行网络互联通信的。
整个系统总体设计如图2所示。
图2基于IEC61131-3标准的嵌入式PLC系统的总体结构5.嵌入式运行环境系统的设计简述嵌入式PLC系统由编译系统和运行系统、人机界面、外围设备以及驱动设备五部分组成。
最主要的两部分是编译系统和运行系统。
在连接编译系统和运行系统之前需要先配置编译系统,添加IO设备描述文基于IEC61131-3标准嵌入式PLC 系统探析太原科技大学电子信息工程学院张学超杨铁梅毕友明[摘要]本系统使用德国3S 公司开发的CoDeSys 软件搭建PLC 系统框架,系统符合IEC61131-3标准,以运行系统为核心,采用Tcp 网络协议进行数据转发以及使用共享内存技术,实现人机界面、CoDeSys 编译环境以及驱动器之间资料的实时交互。
整个系统按照PLC 程序设计的逻辑流程运行,达到控制系统的要求。
[关键词]IEC61131-3标准CoDeSys Tcp共享内存IEC61131-3标准公共元素编程语言图形类文本类作者简介:张学超(1985-),男,在读硕士研究生,主要研究方向,控制理论与控制工程;杨铁梅(1967-),女,教授,硕士生导师,主要研究方向:主要从事智能检测技术与故障诊断方面的研究工作等。
博士·专家论坛件,加载IO设备。
再配置运行环境,在运行系统中添加IO设备驱动,在配置文件里设置组件,使运行系统支持编译环境。
运行系统和编译系统的连接原理如图3所示。
图3编译系统和运行系统连接运行原理5.1CoDesys编译系统的配置在CoDeSys编译环境中添加设备,需先添加设备描述文件———XML文件。
描述文件添加成功后,才能在添加设备中找到相应的设备组件。
设备描述文件包括六个部分:Types、ParameterFiterFlags、Strings、Files、Device、Modules。
Type定义各种数据类型,基于标准数据类型的基础上,可根据需要自定义数据类型。
ParameterFiterFlags是用于描述设备的参数。
Device是描述设备组件信息。
设备描述文件基本格式如下所示。
-<DeviceDescription><Typesnamespace="localTypes"/><Stringsnamespace="local"/>-<Device>-<DeviceIdentification><Type>8000</Type><Id>16100001</Id><Version>V1.0.0.0</Version></DeviceIdentification>-<DeviceInfo><Namename="local:typename">CoDeSysDevice</Name><Descriptionname="local:typedescription">CoDeSysDevice</De-scription>………………………………</Device></DeviceDescription>按照设备描述文件的格式,同时可以为系统其他设备的描述文件,尤其是IO模块设备的添加。
编写IO的设备描述文件IO-Configuration.devdesc。
添加设备后添加映射如图4所示:图4在CoDeSys添加设备并且建立IO映射编译环境中添加设备描述文件后,开放式的CoDeSys就是为本系统服务的编译环境。
在这个开放的编译环境里面,可以采用通用的五种编程语言,编辑PLC程序指令流程。
5.2运行系统的配置执行底层CoDeSys的运行系统,编译系统可通过网络搜索网络上正在运行的运行系统,激活连接状态,系统即为可用。
在编译系统中添加IO设备的描述文件,只是用于上层人机界面的友好操作,本身并没有实际的意义。
只有在底层添加支持IO设备的lib库文件,才能真正完成对硬件的读写操作。
Codesys支持Lib库的二次开发。
开发相应的驱动程序,只需要将lib组件在Codesys运行系统中加载。
6.嵌入式运行系统架构阐述在完成上述配置之后,在编译系统上编写好的PLC程序,经过编译后,已经可以将程序下载到运行系统中,并且为IO设备添加设备描述文件和相应的lib驱动库文件,PLC程序中可以直接操作硬件IO信息,给出信号指令。
Task在指定的时间内对系统硬件信息进行扫描处理。
这是一个基本的嵌入式系统基本构成。
运行系统的基本程序执行流程如图5所示。
应用到实际工业的系统运行需加载HMI人机界面以及驱动器。
完成三部分之间的信息传输是整个系统架构的核心。
在编译系统和运行系统连接的基础上,重新处理运行系统,将运行系统作为一个核心,创建服务器和客户端,HMI和驱动器之间的通信。
开辟共享内存区,以实现HMI和PLC之间的通信,以及PLC和驱动器之间的通信。
架构图形见图2基于IEC61131-3标准的嵌入式PLC系统的总体结构。
图5嵌入式PLC运行系统程序执行流程图创建客户端和服务器端需要创建Socket通信接口,函数原型如下:intsocket(intdomain,inttype,intprotocol);Bind函数将socket与本机上的一个端口相关联,随后就可以在该端口监听服务请求。
intbind(intsockfd,structsockaddr*my_addr,intaddrlen);面向连接的客户程序使用Connect函数来配置socket并与远端服务器建立一个TCP连接。
intconnect(intsockfd,structsockaddr*serv_addr,intaddrlen);Listen函数使socket处于被动的监听模式,并为该socket建立一个输入数据队列,将到达的服务请求保存在此队列中,直到程序处理它们。
intlisten(intsockfd,intbacklog);accept()函数让服务器接收客户的连接请求。
在建立好输入队列后,服务器就调用accept函数,然后睡眠并等待客户的连接请求。
intaccept(intsockfd,void*addr,int*addrlen);数据传输Send()和recv()这两个函数用于面向连接的socket上进行数据传输。