5.自差测定与计算
7、自差测定与校正

7、自差测定与校正自差测定磁罗经自差的测定可以用测定目标方位来求得,也可用航向来求得。
测定自差的公式写为d = MB - CBd = MC - CC式中MB和CB分别为目标的磁方位和罗方位,MC和CC分别为船舶磁航向和罗航向。
1.利用叠标方位测定自差1)选择适合的人工叠标或天然叠标;2)在海图上查取或量出叠标的真方位;3)计算出磁差V ar,求出叠标的磁方位:MB=TB-V ar;4)测定叠标的罗方位:距近标的距离为3~5倍叠标间距,太远误差大,太近测不准。
5)根据d = MB - CB计算出自差d。
2.利用天体方位测定自差1)选择适合测定自差时间内的低高度(在30°以下)天体,如太阳;2)利用天体方位表查出自差连续测定时间内的天体真方位;3)修正当地磁差V ar,计算出天体磁方位MB;4)按计划时间测定天体的罗方位;5)根据d = MB - CB计算出自差d。
3.利用远距离单一目标测定自差1)选择距离远远大于旋回半径(200倍以上)的合适目标;2)测量船舶在N、NE、E、SE、S、SW、W、NW八个航向上的目标罗方位;3)根据MB=S CB/8计算出目标的磁方位MB;4)根据d = MB - CB分别计算出八个航向上的自差d:4.利用陀螺罗经航向比对求自差1)查出陀螺罗经的罗经差DG和船位处的磁差V ar;2)记下同一时刻的陀螺罗经航向GC和磁罗经航向CC;3)根据d =(GC + DG)- V a r - CC计算出自差。
校正自差的必要性1.自差校正的必要性如果船用磁罗经没有进行自差校正,那么:1)自差较大,不能使用自差公式计算某航向上的自差(即自差公式不成立);2)在某些航向上,磁力合力很小,几乎为零,不能克服轴针和轴帽之间的摩擦力;另外一些航向,自差大,引起罗盘大幅度摆动,使磁罗经失去指向性;3)某些情况下,罗盘会跟随船舶以相同角速度转动,以致于罗经指示不出船舶在转向。
如若MC =290°时的自差d=10°;MC =300°时的自差d=20°,两种情况磁罗经航向均为280°,则当船舶从290°转向300°时,磁罗经无法指示出船舶在转向。
自差测定
2. 自差表制作: 制作供船舶航行使用的自差表,先 将计算的5个自差系数代入自差公式, 求得每隔15°航向一个自差,自差表中 还画有自差曲线和记载着各种校正器的 位置以及五个自差系数值。
从自差表判断自差校正质量 自差曲线应顺滑,无明显的角点,否则 该航向上的观测或计算自差有误差; 各自差系数在0.5°左右,一般小于1°, 否则各航向自差也较大; 8个实际观测的剩余自差与计算的该航 向自差其差值应小于0.5°
八、自差表及自差系数的计算
校完罗经自差后,列出自差表,以供船 舶航行使用。 1.自差系数的计算: 将在8个航向上测得的剩余自差δN,δNE, δE,δSE,δS,δSW,δW,δNW代入 自差公式: δ=A+Bsin ’+Ccos ’+Dsin2 ’+Ecos2 ’
得到8个方程: δN=A+C+E δNE =A+Bsin45°+Ccos45°+D δE =A+B-E δSE =A+Bsin13=A+Bsin225°+Ccos225°+D δW =A-B-E δNW =A+Bsin315°+Ccos315°-D
• • •
返回
• •
• • •
4.与陀螺罗经航向比对求自差 δ= '电+△g-Var- ' '电-陀螺罗经航向 △g -陀螺罗经误差 利用航向比对法求自差,一定要注意 同时观测陀螺罗经和磁罗经航向,否则 航向上的误差将全部反映在自差中。 5. 无论上述哪种方法,船舶转至新航向 后,必须待罗盘完全稳定时,方可进行 自差的测定。
用最小二乘法求解,得5个自差系数为:
A
N NE E SE S SW W NW
8
(E W ) (NE SW ) sin 45 (SE SE ) sin 45 B 4 (N S ) (NE SW ) sin 45 (SE SE )( sin 45) C 4 (NE SW ) (SE NW ) D 4 (N S ) (E W ) E 4
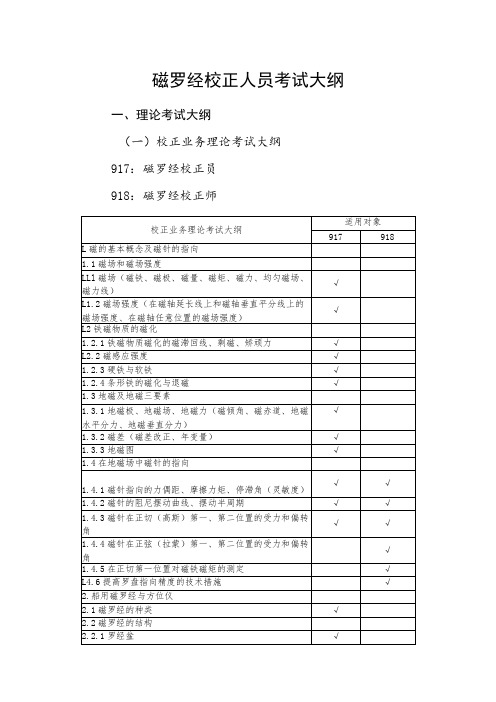
磁罗经校正人员考试大纲
√
3.1.6结合船舶实际软铁系数的比较、分析
√
√
3.1.7任意铁杆感应磁性的软铁力
√
3.L8泊松方程式及其含义
√
√
3.2船体正平时的指北力和自差力
3.2.1指北力λH;指北力系数入;指北力与磁纬度的关系
√
√
3.2.2自差力(A入H、B入H、C入H、D入H、EλH)
√
√
3.2.3在主点和偶点磁航向的作用力图
√
1.8.2倾斜自差校正
V
1.8.3半圆自差的校正
√
1.8.4象限自差的校正
√
1.8.5校正罗经自差的程序
√
1.9自差的测定和自差表的计算
√
2.磁罗经自差校正的会话用语
2.1会面
√
2.2校正前的准备
√
2.3舵令
√
2.4车令
√
2.5校正自差
√
2.6交接
√
二、实际操作评估大纲
评估纲要
适用对象磁罗经校正员
适用对象919
L磁罗经自差校正的专业用语及词汇
1.1破的基本概念
√
1.2船用磁罗经
1.2.1磁罗经的种类
√
L2.2磁罗经的结构
√
L3磁罗经的检查及安装
L3.1磁罗经的检查
√
L3.2磁罗经的安装
√
1.4自差的概念
√
1.5半圆自差
√
1.6象限自差
√
L7倾斜自差
√
1.8自差校正
1.8.1磁罗经自差校正原则和时机
√
4.2.4爱利法校正自差的准确性
√
4.2.5佛氏软铁的应用-CZ力的校正
磁罗径自差

磁罗经自差消除、测定船长:你好!关于每年至少一次的磁罗经自差消除和绘画自差曲线表工作,要自己在海上进行。
消除自查和测定自查后,绘画自查曲线表,船长签字并加盖船章,同时记入《航海日志》的当天的大事记栏内备查。
消除自查的标准为正负3度内,當赴某一港发现自查较大时,也应在到港前视情及早测定消除,以防止PSCO滞留船舶。
(我们一般用电罗经航向比对法来消除和测定自差)。
一、用电罗经作航向比对,求自查。
二、用旋回法消除磁罗径自查和测定自差。
三、船走在磁E 或磁w 航向时,用纵磁棒(磁棒顺船首尾方向放置,红端指向船艏或是船尾)消除半圆自查。
四、船走在磁N 或磁S航向时,用横磁棒(磁棒横向放置,红端指向左正横或右正横)消除半圆自查。
五、消除自查时的选择航向原则:先消除半圆自查中最大的。
例如:某轮磁罗经在N航向的自查是+10度,在S航向上自查是—5度;在W航向上自查是-20度,在E航向上自查是—10度;1、因w航向的自查最大,则船应先走磁W航向,用纵磁铁棒先消除该磁航向上的自查(—20)到零;2、(因N 航向的自查较大(第二),在走完W航向后,船就走磁N航向,用横磁棒消除该磁航向上的自查(+10)到零;3、船走磁E航向,用纵磁铁消除自查到一半;4、船再走磁S航向,用横磁铁消除自查到一半。
六、具体举例如下:1、事先测定处N 、E、S、W 四个磁航向上的自差:找出N和S以及(E和w)这每对磁航向中那个自查最大,来作为消除自差时先走那个磁航向的依据(见第五条)。
(1)、求当地磁差:如:2度东----(+ 2)(2)、求磁航向:真航向(电罗经航向)= 磁航向+磁差例如:计划先走磁北航向消除自查,予求电罗经航向= ?磁北000 度+ (+ 2)= 002即:电罗经走002度(即走在磁航向上=N),假设此时的磁罗经读数如为350(罗航向),则应:测、求N磁航向自差:罗经差=磁差+ 自差罗经差= 真航向—罗航向=002 —350 = +12自差= 罗经差—磁差=(+12)—(+2)=+10 以此类推,测求E磁航向的自差;例:—10--------S-------------------; 例:—5-------w-------------------;例:—202、消除自差:按照“先消除最大的自差的原则”,则选:(1)、因w磁航向自差最大(—20),则先消除;船走272度电罗经航向(即等于磁西航向),移动纵磁棒, 把自差消除到零,使磁罗经读数为270即可。
自差计算公式

自差计算公式自差是指某一变量的值与其平均值之间的差异。
在统计学中,自差是衡量数据离散程度的一种方法,它可以帮助我们了解数据的分布情况,以及数据集中趋势。
自差计算公式是用来计算自差的数学公式,通过这个公式,我们可以得到数据的离散程度,从而更好地理解数据的特征。
自差计算公式可以表示为:\[ D = \frac{1}{n} \sum_{i=1}^{n} |x_i \bar{x}| \]其中,D代表自差,n代表数据的数量,xi代表第i个数据点的值,而x代表数据的平均值。
这个公式的含义是,首先计算每个数据点与平均值之间的差值,然后取绝对值,最后求和并除以数据的数量,得到的就是自差。
自差计算公式的应用非常广泛,它可以用于各种领域的数据分析中。
比如在金融领域,我们可以用自差来衡量股票价格的波动程度,从而评估风险;在生物学领域,我们可以用自差来研究基因的表达水平的变异情况;在教育领域,我们可以用自差来分析学生的考试成绩的分布情况。
除了用于数据分析,自差计算公式还可以帮助我们进行数据的预处理。
在机器学习领域,数据的预处理是非常重要的一步,而自差可以帮助我们了解数据的分布情况,从而选择合适的预处理方法,比如标准化、归一化等。
在实际应用中,我们可以通过编程语言来实现自差计算公式,比如使用Python语言可以很方便地计算自差。
下面是一个简单的Python代码示例:```python。
def self_difference(data):n = len(data)。
mean = sum(data) / n。
difference = sum(abs(x mean) for x in data)。
self_diff = difference / n。
return self_diff。
# 调用自差计算函数。
data = [1, 2, 3, 4, 5]result = self_difference(data)。
print(result)。
磁罗经自差测定及自差表的使用

题卡1评分标准:以下两题每题各5分,总分10分1、2012年3月16日,ZT1730。
某轮观测太阳低高度的罗方位CB260°.0,船位:φ31°30′.0N, λ121°30′.0E。
当地的磁差资料为“磁差1°30′.0E(2002), 年差3′E”。
求磁罗经的自差Dev。
2、 2012年3月16日,某轮罗航向CC032°,请根据以下自差表计算磁罗经的自差Dev。
某轮标准罗经自差表题卡2评分标准:以下两题每题各5分,总分10分1、2012年X月X日,某轮船位:φ31°30′.0N, λ121°30′.0E。
从海图上差得当地磁差资料为“磁差2°30′.0E(2002), 年差3′E”。
请根据评估员的指定测量某一物标的罗方位CB,并根据评估员给出该物标的真方位TB,计算磁罗经的自差Dev。
2、2012年X月X日,某轮罗航向CC200°,请根据以下自差表计算磁罗经的自差Dev。
某轮标准罗经自差表磁罗经自差测定及自差表的使用题卡3评分标准:以下两题每题各5分,总分10分1、2012年X月X日,某轮船位:φ31°30′.0N, λ121°30′.0E。
从海图上差得当地磁差资料为“磁差3°30′.0E(2002), 年差3′E”。
读取当时的陀螺罗经航向GC为200°,磁罗经航向为200°,陀螺罗经差△G=+2°,求磁罗经的自差Dev。
2、2012年X月X日,某轮罗航向CC170°,请根据以下自差表计算磁罗经的自差Dev。
某轮标准罗经自差表磁罗经自差测定及自差表的使用题卡4评分标准:以下两题每题各5分,总分10分1、2012年3月25日,ZT0730。
某轮观测太阳低高度的罗方位CB098°.0,船位:φ31°30′.0N, λ121°30′.0E。
船用磁罗经的自差校正讲解

不能用硬铁力f2去抵消 f1 软铁力(A‘+E’)λH, F 为消除多余的f2力, 将船转至 =180°
f2 0
SN
2) =180 °
自差δs是由 大小相等,方 向相同的软铁 力(A‘+E ’) λH和硬铁 力的f。2共同产生
λH B'λH D 'λH
f2 (A'+E ')λH
H'
C'λH
δ /2
0
f1
NS
λH B'λH
D 'λH
f2 (A'+E ')λH H'
C'λH
δ /2
0
f1
NS
2) =180 °
调整横向磁铁,消 除一半自差,即抵消 了而多仅余由的横硬向铁磁力铁产f2,生 f1力抵消了C ‘λH力。
λH B'λH D 'λH
f2 (A'+E ')λH
H'
δ /2
现象; 或在船舶转向后,罗盘大幅 度摆动。
2. 需校正自差的情况
1)修船后,特别是驾驶台附近结构有较 大变动时;
2)船舶剧烈震动,碰撞,搁浅,或遭雷 击后;
3)罗经移位后; 4)装运磁性货物卸货后,或使用电磁吊
装卸货物后。 5) 标准罗经自差大于3°,操舵罗经自
差大于5° 6) 每年重新校正一次自差。
2.倾斜自差校正方法 1) 船正平时校正方法
将倾差仪置于岸上,无磁性干扰的 地方,离地一米以上,移动滑重, 使磁针水平,测得地磁力Z的格数n。
将倾差仪带回船上,将滑重移至n ' 处, n '=Z 'EW=λZ= λ n (λ标=0.8-0.9 λ操=0.6-0.8)
第八章第四节、磁罗经自差的测定与校正

二、自差测定方法
1.利用叠标方位测定自差
• 叠标方位准确,测量方便; • 船需位于叠标线上才可测得方位,
测定自差花费时间较多;
• 为方便测量,至少应选取互相垂直 的两组叠标
2.利用太阳方位测定自差
• 利用太阳方位测定自差准确度高,且可 连续测定自差,操作快捷,方便。
f1
软不铁能力用(硬A铁‘–E力’)f2去λH抵,消
F
为消除多余的f2力
将船转至 =270°
H
C'λH D 'H
B'λH (A'-E ')λH
H'
δE
f2 0
SN
Nm
C'λH D 'H
H
2) =270 °
f2 (A'-E ')λH
H'
δW
B'λH
0 NS
f1
2) =270 °
相自等差,δ方W向是相由同大的小软 铁力(A‘–E’)λH和硬 铁力f2共同产生的
D 'H
H'
δNE
f2
f1
F
0
2.校正象限自差方法
• 在校正半圆自差后进行 • 在两相邻的象限航向上
校正
1) =45 °
•当用软铁力F把自差δNE 消除为零时,
F= A‘λH+ D’λH
f2
令F=f1+f2 则
F
f1= D'λH,f2= A'λH
Nm H
E'λH
A'λH D 'H H'
δNE
服摩擦力而不能指示方向; 或在某些航向上罗盘出现“呆滞”
测量中误差计算公式很有用哦

测量中误差计算公式(很有用哦) 测量中的误差计算公式是用来确定测量误差大小的一种方法。
误差通常是由于测量设备、环境条件、操作人员等因素的影响而产生的,这些因素都会导致测量结果的不准确性。
因此,误差计算公式是一种有用的工具,可以帮助我们了解测量结果的可靠性。
误差计算公式通常基于平均值和标准差的概念。
平均值是测量结果的平均值,标准差则是反映测量结果离散程度的指标。
标准差越小,说明测量结果的离散程度越小,误差也就越小。
1.收集多个测量数据,并计算出它们的平均值。
2.计算每个测量数据与平均值之间的差值,得到差值列表。
3.对差值列表进行平方,然后求和。
4.将总和除以测量数据的数量,得到平均方差(即平均值的平方的平均数)。
5.将平均方差开平方,得到标准差。
6.最后,根据需要,可以将标准差转换为相对误差或绝对误差。
需要注意的是,误差计算公式只是一种估计误差大小的方法,实际误差大小可能受到更多因素的影响。
因此,在使用误差计算公式时,需要结合实际情况进行综合考虑。
此外,还有一些其他的误差处理方法,如不确定度评估、最小二乘法等。
这些方法都可以用于估计测量结果的可靠性,但具体使用哪种方法需要根据具体情况而定。
总之,误差计算公式是一种有用的工具,可以帮助我们了解测量结果的可靠性。
在实际应用中,我们需要综合考虑各种因素,选择合适的误差处理方法,以确保测量结果的准确性和可靠性。
5.自差测定与计算

自差测定与计算——方位法
241°30′ 266°30′
西
蟹
寺
291°30′
331°30′ Var=4°30′w 021°30′
2012-3-17 32 - 5
356°30′
自差测定与计算——方位法
自然叠标选用应注意: 自然叠标选用应注意: ①目标可靠准确多组,易于辨认,且远标要高 目标可靠准确多组,易于辨认, 于近标; 于近标; ②目标的距离要适中,叠标方位敏感性好(与 目标的距离要适中,叠标方位敏感性好( 近标的距离控制在3~ 倍的两标距离内 倍的两标距离内); 近标的距离控制在 ~5倍的两标距离内); ③所处的海区干净、开阔,便于操纵。 所处的海区干净、开阔,便于操纵。
2012-3-17
32 - 10
赤纬与纬度同名
赤纬 真太阳 时上午 …… 08 04 0700 0656 …… …… ° …… …… …… …… …… …… 22° ° …… 77.9 77.6 77.1 76.7 …… 23° ° …… 76.9 76.6 76.1 75.7 …… 24° ° …… 75.9 75.5 75.1 74.7 …… …… ° …… …… …… …… …… …… 纬度 30 ° 真太阳 时下午 …… 52 0456 0500 04 ……
年度 日期 1 2 3 4 …..
自差测定与计算——方位法
(3)预制太阳磁方位表 )
目的:求出测消磁罗经自差时间内的每隔一定 时间(一般为2分钟)的太阳磁方位,供测消自差时 使用。 使用表册:《太阳方位表》 查表引数:测者纬度、太阳赤纬δ⊙、视时 测者纬度、太阳赤纬 测者纬度
2012-3-17
32 - 16
2012-3-17 32 - 18
磁罗经

基本要求
磁的基础知识 船用磁罗经
磁罗经检查保管与安装
磁罗经自差原理
罗经自差校正
基本要求
1.掌握磁的基本知识和地磁三要素。
2.熟练掌握磁罗经的结构组成及磁罗经的正确使用 方法。
3.熟练掌握磁罗经的四个检查与调整项目。
4.掌握自差的特点及自差公式,掌握自差的测定方 法,了解自差表的计算方法 5.掌握消除自差的基本原则,了解消除自差的方法 (顺序)及注意事项
2.罗盆:由盆体、支承液和罗盘组成
罗盘 :
起指向作用,是磁罗经的核心部分。 组成:刻 度盘、浮室、磁钢和轴帽(支承罗盘) 刻度盘由铜片、云母、环氧玻璃等非磁性材制作, 上面刻有0-360度刻度和方向点。 浮室:为水密空气室以增加罗盘浮力减小轴针与 轴帽之间的摩擦力。 轴帽:轴帽中心处嵌有宝石,轴针尖端由铱金等 硬金属制成,以减小与轴帽间的摩擦力。 磁钢:磁钢轴线与刻度盘0-180度对称平行罗盘 磁钢有条形磁棒和环形磁钢两种类型
S
N
H
2.磁性物质依据其保留磁性程度可分为: 软铁: 可在弱磁场中被磁化,但其磁性不固定, 随外界磁化场的变化而变化,矫顽力 Hc≤50奥;
如船上的隔板等---感应船磁
硬铁: 须在较强磁场中磁化,被磁化后可较长期 保留磁性,矫顽力Hc﹥50奥。 如船壳体---永久船磁
3.磁滞回线 矫顽力Hc:使B(磁感应强度)减小至零的 反向磁场Hc称为矫顽力。 剩磁Br:当H变为零时,铁磁体所具有的磁 感应强度Br称为剩磁。 硬铁:Br大,Hc大,磁滞回线面积大,Hc 通常大于50奥,如碳钢等。 软铁:Br很小,Hc很小,磁滞回线面积狭 小,Hc通常小于几奥,如矽钢等
三.方位圈
1.观测物标方位 观测物标方位时, 从照门孔通过 照准线观测物 标,当测者看 到物标、照准 线和照门孔三 者在一直线上 时,即从照准 架下的三棱镜 中读出黑线所 对应的度数就 是物标的罗经 1.照门 2.照门孔 3.照准架4.照准线5.黑色反射玻璃板6.棱镜7.水准泡8.反射镜 方位。使用时 9.可调螺钉10.方位匣11.弦角刻度12.握钮 应注意方位圈
测量中误差计算公式很有用哦
测量中误差计算公式很有用哦测量中误差指的是测量结果与实际值之间的差异。
它由两个部分组成:系统性误差和随机误差。
系统性误差是由于测量仪器的固有偏差、环境变量等因素引起的,它们会使得测量结果一直偏离真实值,无论我们如何反复测量。
随机误差则是由于随机因素,如人为误差、环境噪声等引起的,它们使得测量结果在一系列重复测量中有所不同。
为了可以对测量中的误差进行定量分析和评估,我们需要使用测量中误差计算公式。
以下是一些常见的测量中误差计算公式:1. 平均值(Mean):平均值是一组数据的总和除以数据的个数。
在测量中,我们通常重复进行多次测量,然后计算这些测量结果的平均值来减小随机误差的影响。
2. 方差(Variance):方差是一组数据与其平均值之差的平方的平均值。
它衡量了测量结果的离散程度,可以用来评估测量结果的可靠性和精确度。
3. 标准差(Standard Deviation):标准差是方差的平方根,它表示了测量结果的离散程度。
标准差越大,表明测量结果的离散程度越大,测量的可靠性越低。
4. 置信区间(Confidence Interval):置信区间是用来表示测量结果的不确定度的一种方法。
它给出了测量结果的一个范围,我们可以有一定的置信度(通常使用95%置信度)认为真实值位于这个范围内。
5. 最大误差(Maximum Error):最大误差是指测量结果与真实值之间的最大差异。
它表示了测量结果的可能误差范围的上限。
6. 相对误差(Relative Error):相对误差是指测量结果与真实值之间的差异除以真实值的比值。
它可以用来评估测量的准确度,一般用百分比表示。
物理实验练习题解析如何正确进行测量误差计算

物理实验练习题解析如何正确进行测量误差计算物理实验是物理学学习中至关重要的一环,通过实验可以巩固理论知识,培养实践能力,并且帮助学生更好地理解物理现象。
在进行物理实验时,准确的测量是至关重要的,而测量误差的计算则是确保测量结果准确可靠的关键之一。
本文将从测量误差的概念、测量误差的类型、计算测量误差的方法等方面来解析如何正确进行测量误差计算。
一、测量误差的概念在进行实验测量时,由于各种因素的干扰,所得到的测量结果与被测量值之间存在偏离,这个偏离称为测量误差。
测量误差是实验中不可避免的,但可以通过一定的方法进行计算和减小。
二、测量误差的类型1. 系统误差系统误差是由于测量仪器、环境等因素产生的固定偏差。
例如,温度对长度的测量产生的影响、仪器自身的精度限制等。
系统误差的存在会导致测量结果偏离真实值,但是可以通过调整仪器、改变测量条件等方法进行减小。
2. 随机误差随机误差是由于测量观察者的精度、测量操作的不确定性等因素引起的。
随机误差在重复实验中会有不同的取值,具有一定的概率规律性。
随机误差可以通过多次重复实验,取平均值的方法来减小。
三、计算测量误差的方法1. 绝对误差绝对误差是测量值与其真值之间的差异,用Δ值表示。
Δ值可以通过测量值减去真值来计算。
例如,在实验中测量某物体的长度为30cm,而真实长度为30.5cm,那么Δ值就是0.5。
2. 相对误差相对误差是测量值与真值之间的差异与真值的比值。
相对误差可以用来表示测量结果的相对偏差大小,更有利于比较不同实验或不同测量结果之间的准确性。
相对误差可以通过Δ值除以真值再乘以100%来计算。
3. 平均值与标准差在实验中,为了减小随机误差的影响,通常要进行多次测量,并计算平均值与标准差。
平均值的计算方法是将所有测量值相加,然后除以测量次数。
例如,实验测量某物体长度10次,测量值分别为30.1cm、30.3cm、30.2cm等,则平均值为(30.1+30.3+30.2+...)/10。
3、自差和自差系数

3、自差和自差系数船舶正平时的自差直接运用泊松方程不能解决罗经实际使用中的自差问题,必须通过对产生自差的各力以及与船舶航向之间的关系进行分析,才能最终导出实用的自差公式。
在钢铁船上的罗经,罗盆置于常平架上且具有摆性,罗盘通常保持水平;罗盘磁针指向x轴和y轴上作用力的合力H¢方向,H¢和地磁水平分量H之间的夹角即是自差d。
当船舶正平时,泊松方程中的Z¢力垂直作用于罗盘平面,对罗盘磁针的指向不会产生影响。
而决定磁针指向的磁力是作用于罗盘平面的X¢力和Y¢力。
1.作用罗盘平面的力A¢、B¢、C¢、D¢、E¢——称为罗经准确自差系数,无单位。
分析之,可将作用于罗盘平面的九个地磁力、硬铁力和软铁力合并为六个力,分别为:1)指北力lH:沿磁子午线作用指向磁北极,不产生自差,是对罗经的有益分量。
l称罗经系数,其越大,罗经的指向性越好。
l值由软铁系数a和e确定,即0 l 1。
一般标准罗经l = 0.8 ~ 0.9,操舵罗经l = 0.6 ~ 0.8。
如果l 0.3,罗经不能正常工作。
2)自差力A¢lH:垂直于磁子午线方向。
若A¢> 0,则A¢lH力指磁东向;若A¢ 0,则指磁西向。
3)自差力B¢lH:作用于船舶首尾向上。
若B¢>0,则B¢lH力指船首向;若B¢0,则指船尾向,即MC或MC +180°。
4)自差力C¢lH:作用于船舶左右舷正横向上。
若C¢> 0,则C¢lH力指右正横向,若C¢ 0,则指左正横向,即MC ±90°。
5)自差力D¢lH:作用于2倍船舶磁航向或加减180°上。
若D¢>0,则D¢lH力指向为2MC;若D¢ 0,则指向为2MC ±180°。
自动检测有关计算公式

有关误差的计算公式测量误差的表示例题1:某温度表准确度等级为1.5,量程为0~500℃,求:①引用误差,②最大绝对误差,③测量值为400℃时可能出现的最大示值相对误差解:①γm =±1.5%②最大绝对误差△m = γm ×Am =±1.5%×500=±7.5℃③ γx =△m ÷400×100%=±1.875%测量结果数据处理步骤①将读数列表;②计算测量列xi 的算术平均值;③在每个读数旁边列出残差Vi ;④检查Vi 之和是否为0,不为0则检查错误;⑤每个残差旁列出平方值,求出方均根误差σ⑥有Vi 大于3σ的,认为有粗大误差,去掉,重复②⑦计算算术平均值的标准差σ⑧得到测量结果x=x ±3σ测量系统静态误差的合成一个系统由多个环节组成,整个系统的静态误差等于每一个环节的误差综合,称为误差合成。
误差合成方法:某测量系统由4个0.5%和±1.5%,求测量系统的总误差。
解:①用绝对值合成法:环节组成,每个环节的误差分别为±1%,±2.5%,±γm =±(1+2.5+0.5+1.5)%=±5.5%②用方均根合成法:2n 222121...)...(γγγγγγγγγ+++=②方均根合成法的绝对值之和误差合成误差等于各个环节①绝对值合成法:总的m n i m +++±==∑ 3.1%75.95.15.05.212222±≈±=+++±%%=γ绝对误差△X =测量值X -真值A0相对误差,分为实际相对误差和示值相对误差。
引用误差引用误差是仪器仪表绝对误差△X 与仪表满度值XFS 的百分比。
流量计算有关公式:节流式流量传感器由节流装置、压差测量装置和仪表组成A X X 100A X 100X δδ⨯=⨯绝对误差△实际相对误差=%约定真值绝对误差△示值相对误差%仪器示值F FS X 100X δ∆⨯引用误差=%)真值测量值(分贝误差=lg 20⨯vS vT vS m SvS m T vT Q AvQ Q dt Avdt Q Q Av Q Q Av dtρρρρ=======⎰⎰⎰瞬时体积流量:累积体积流量:瞬时质量流量:累积质量流量:f b0p p p Q v S S p αεαε=-=节流装置前后压差△则流体体积流量为::流量系数,由实验确定:流体膨胀修正系数:节流装置收缩最厉害的截面积测得节流装置前后的静压差△即可测得流体体积流量。
磁罗经自差校正方法及计算表格

磁罗经自差校正方法第1 页《一》磁罗经剩余自差公式:C = C x CosC象限自差:δD = D x Sin2C δE = E x Cos2C剩余自差及剩余自差系数公式:δ= A + BxSinC +CxCosC +DxSin2C +ExCos2CA=(δN+δNE+δE+δSE+δS+δSW+δW+δNW)/8(恒定自差系数—不随航向和船位纬度变化)B=(δE-δW)/2 (半圆自差系数—在航向N、S上为零,自差随船位纬度变化)C=(δN—δS)/2 (半圆自差系数—在航向E、W上为零,自差随船位纬度变化)D=(δNE+δSW)—(δSE+δNW)/4 (象限自差系数-自差不随船位纬度变化)E=(δN+δS)—(δE+δW)/4 (次象限自差系数—自查不随船位纬度变化)《二》磁罗经自差校正方法与口诀(爱利法 )一。
消除纵硬铁半圆自差(用纵向磁棒校正)C/C = 090°/(270°)或C/C= 270 °/(090°)全消除/(反航向时将自差消除一半保留一半) 东自差(δE) 东(磁棒红端向东)上;(上移或增加磁棒)东自差(δE) 西(磁棒红端向西 )下; (下移或减少磁棒)西自差(δW)西( 磁棒红端向西)上; (上移或增加磁棒)西自差(δW) 东( 磁棒红端向东 )下;(下移或减少磁棒)二.消除横硬铁半圆自差(用横向磁棒校正)C/C = 000°/(180°)或C/C=180 °/(000°) 全消除/(反航向时将自差消除一半保留一半)东自差(δE) 东(磁棒红端向东)上;(上移或增加磁棒)东自差(δE)西( 磁棒红端向西)下; (下移或减少磁棒)西自差(δW) 西( 磁棒红端向西 )上;(上移或增加磁棒)西自差(δW) 东( 磁棒红端向东 )下;(下移或减少磁棒)三。
消除象限自差(用靠,离软铁球位置校正 )全消除/(相邻象限将自差消除一半保留一半)东自差(δE)Ⅰ,Ⅲ象限靠(045°/225°); Ⅱ,Ⅳ象限离 ( 135°/315°);西自差(δW)Ⅰ,Ⅲ象限离(045°/225°);Ⅱ,Ⅳ象限靠 (135°/315°);注:校正时航向(C/C)为磁航向,使用电罗经航向时应对应成磁航向来操纵,船按旋回顺序航向进行,第一圈用来校正磁罗经误差,第二圈用来测定磁罗经剩余自差,填入表中计算剩余自差系数和计算剩余自差,画出自差曲线,完成磁罗经校正工作。
磁的基本知识
磁的基本知识王丕刚一、磁铁、磁极和磁矩公元前,我们的祖先就已经知道有一种含铁的矿石具有吸引铁的性质。
这种矿石叫做天然磁铁。
现在用的磁铁,是在铁中加入铝、镍、钴等制成的合金,经人工磁化后制成。
这叫人造磁铁,它可制成各种不同形状。
如条形、针形、马蹄形等。
在磁罗经中,多用条形磁铁。
条形磁铁俗称磁棒。
把磁棒中央线吊起来,等磁棒静止时,它必定停在南北方向上,磁棒指北的一端,称旨北极,用N或红色表示,指南的一端称南极,用S或蓝色表示。
磁极磁性的强弱,用磁量m表示。
规定北极为正,南极磁量为负。
一根磁棒内,两磁极的磁量绝对值是相等的。
两磁极间的距离,用2l表示。
对于整根磁棒来说,磁棒的磁性强弱用磁矩M来表示。
磁矩M=2ml。
磁矩和磁量都没有专门的单位名称,在厘米克绝对电磁单位制中,用该单位制的通用符号CGSM来表示。
二、磁力和磁场假设有两个磁极,磁量各为m1和m2,两者相距为r。
在这两磁极上,互相会产生作用作用力方向,在两磁极力连接上。
两磁极的极性相同时,作用力为斥力。
极性相异时,作用力为吸力。
作用力用下式表示:F=k|m1.m2|/r2 (k 表示比例系数)第三章自差的测定和计算消除磁罗经自差时,要测定自差;消除自差后,要测定0,45。
等八个航向的自差,航行中,要定时测定自差;等。
在航海应用中,关键是要准确地测定磁罗经的自差。
第一节测定自差的方法测定自差的方法,基本有两种:一种是测定目标的罗经方位,应用公式:自差=磁方位-罗经方位。
求得罗经的自差。
这需要知道目标的磁方位。
另一种是比对罗经的航向,应用公式:自差=磁航向-罗经航向,求得罗经的自差。
这需要知道船舶的磁航向。
通常在主罗经上,能测得外界目标的方位时,用测方位求自差。
在驾驶罗经上,用比对航向法求自差。
另外,各个磁罗经都可与电罗经比对航向求自差。
利用岸上目标测定自差利用已知磁方位的叠标利用不知磁方位的一组叠标利用单一目标测定自差利用太阳测定自差(一) 预制太阳磁方位表为了计算出太阳的磁方位,必先知道太阳的真方位,因为:“真方位-磁差=磁方位。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
太阳时差表(每日世界时12时) 太阳时差表
2004 2008 2012 2016 …… m s …… …… …… …… …… 6月 m - 2 - 2 - 1 - 1 …… s 09 00 50 40 7月 m - 3 - 4 - 4 - 4 …… s 53 04 15 25 8月 m - 6 - 6 - 6 - 6 …… s 16 12 07 01 …… m s …… …… …… …… ……
δ=
MC - CC (一)比对法 δ=MC - CC 1.与主磁罗经比对航向 与主磁罗经比对航向 δ驾=CC主+δ主- CC驾 主 2.与陀螺罗经比对航向 与陀螺罗经比对航向 δ=GC+△G - Var - CC △
2012-3-17 32 - 3
自差测定与计算——方位法
(二)方位法 1、利用岸上目标测定自差 、 (1)利用已知磁方位的叠标 )
叠标类型:人工、自然 叠标类型 磁方位:有关航海资料(如海图、航路指南等) 磁方位 人工叠标特点:目标明显,叠标有足够的敏感性; 人工叠标特点 方位准确;叠标多组;海区开阔干净。但易受天 气条件不能连续测定自差。
2012-3-17 32 - 4
自差测定与计算——方位法
241°30′ 266°30′
自差测定与计算——方位法
测消自差海区的纬度。 ①确定纬度ϕ :测消自差海区的纬度。 根据年、 ②确定太阳赤纬⊙:根据年、月、日查太阳 确定太阳赤纬 方位表后部“附表 的 太阳赤纬表”得到。 方位表后部“附表1”的“太阳赤纬表”得到。 注意:表列数据为每日世界时12h的数据,精确 注意:表列数据为每日世界时12 的数据, 求可根据时间进行内插。 求可根据时间进行内插。
2、自差计算表(按表头提示填写)
2012-3-17
32 - 28
磁罗经自差计算表
准确到0º.01) 根据八个自差求五个自差系数 (准确到 ) (1) 航 自 向 差 N NE E SE 航 向 S SW W NW (2) (3) (4) (5) (6) (7) (8) (9) (10)
(7) − (8) 2
2012-3-17
32 - 8
自差测定与计算——方位法
2、利用太阳方位测定自差 δ=TB⊙ - Var - CB⊙ ↓ ↓ ↓ 算出 给定 测定
2012-3-17
32 - 9
自差测定与计算——方位法
太阳真方位TB 的来源: 太阳真方位 ⊙的来源: 太阳方位表》 天体高度表》 《太阳方位表》、《天体高度表》、计算机编程计算 (1)《太阳方位表》的结构 ) 太阳方位表》 第一分册: ϕ 0°~30°、 太阳赤纬0°~24° 第二分册: ϕ 30°~64°、太阳赤纬0°~24° 每一分册:中前部分为“纬度与赤纬同名” 中后部分为“纬度与赤纬异名”
2012-3-17
32 - 23
自差测定与计算——方位法
③根据:区时范围以及“时差η+经差”确定查 区时范围以及“ η+经差 区时范围以及 时差η+经差”
表 视时范围。 ④根据纬度30°,在“赤纬与纬度同名”表中 分别查赤纬16°和17°各时间的太阳方位,再 内插成16° 50′的方位值。 二、自差表的计算 自差表:每隔10°(5°)航向有一个自差值。 来 源:根据实际测定的8个航向上的自差值求出 方 法:曲线法;计算法
磁方位 102°.5 102°.9 103°.4 103°.8 104°.3 104°.7 … …
32 - 19
自差测定与计算——方位法
注意: ●纬度与赤纬的同异名; ●上下午为同一张表,为天文方位,需要转 换为圆周方位; ●表列时间为本地真太阳时(视时); ●磁方位=真方位-磁差; ●需要精确求出太阳方位,必须根据纬度和 赤纬进行内插。
2012-3-17
32 - 26
自差表的计算
(二)计算法求自差表 依据: ①δ=A+BSinCC+CCosCC+DSin2CC+ECos2CC ②8个航向上的剩余自差值 δN、δNE、δE、δSE、δS、δSW、δW、δNW
2012-3-17
32 - 27
自差表的计算
1、自差系数的计算原理 根据8个航向的剩余自差,列出8个方程,其中A、 B、C、D、E为方程组的未知数。解方程即可求得这5 个未知数,然后代入自差公式可求得任意航向的自差。
=E =D =A
检查:(3)+(4)=(1) 检查: 检查: 、 值 检查:B、C值
年度 日期 1 2 3 4 …..
自差测定与计算——方位法
(3)预制太阳磁方位表 )
目的:求出测消磁罗经自差时间内的每隔一定 时间(一般为2分钟)的太阳磁方位,供测消自差时 使用。 使用表册:《太阳方位表》 查表引数:测者纬度、太阳赤纬δ⊙、视时 测者纬度、太阳赤纬 测者纬度
2012-3-17
32 - 16
2012-3-17
32 - 6
自差测定与计算——方位法 153 151.5 156
涌 江 口 自 然 叠
中柱岛铁塔
标 磁 方 位
北仑电厂烟囱
2012-3-17
32 - 7
自差测定与计算——方位法
(2)利用单一目标测定自差 ) 要求:目标应比较远 方法:船艇旋回航行在8个航向上,测定目标8 个罗经方位,取其平均值作为磁方位使用。 误差:Sinα=R/D (10海里距离旋回半径为2链时, 误差为1.1°) α——方位误差值 R——船舶旋回半径 D——船舶到目标的距离
2012-3-17 32 - 24
自差表的计算
(一)曲线法求自差表 利用消除自差后在8个航向上测定的剩余自差值, 或专门测定8个航向上的剩余自差值画出自差曲线, 然后根据自差曲线每隔10°(5°)航向求取一自差 值填于自差表内,供今后航行使用。
2012-3-17
32 - 25
自差表的计算
注意: 1、曲线应符合要求 2、曲线弯曲程度要考虑自差点左右的弯曲趋势, 0°与360°点应衔接好。 3、坐标比例不要随意扩大与缩小,一般自差: 航向为1:10左右为宜。
自差测定与计算——方位法
注意:太阳真方位为天文方位, 注意:太阳真方位为天文方位,名称为 × ↓ 与纬度同名 105.8 ↓ 方位数据 × ↓ 上午为E,下午为W 上午为 ,下午为
即:北半球:上午为NE,下午为 北半球:上午为 ,下午为NW 南半球:上午为 ,下午为SW 南半球:上午为SE,下午为 需要将其转换为圆周方位。 需要将其转换为圆周方位。 北半球下午: 360-查表方位。 北半球下午: 用360-查表方位。
2012-3-17 32 - 12
自差测定与计算——方位法
(2)附表有: )附表有: 太阳赤纬表、时差表、角度与正弦函数乘积表、 时度换算表等。 名词解释: 名词解释 太阳赤纬:天赤道与太阳中心间在太阳时圆上所 夹的弧距。当太阳在北天半球时,向北量取,赤纬命 名为N;当太阳在南天半球时,向南量取,赤纬命名 为S。
2012-3-17
32 - 17
自差测定与计算——方位法
③确定太阳视时 时差η 视时 = 区时 + 时差η + 经差 经差T 经差T△λ=λ测-时区中央经度 我国:本地真阳时T⊙ =北京时+经差T△λ+ 时差η 其中:经差T△λ=λ测- 120°,并转换成为分秒 时差η 附表2 查得 时差η:由“附表2”查得 经差与时间的换算: 经差与时间的换算:见“附表4” 附表4 或按下列公式计算: 或按下列公式计算: m; 1°= 4 m;1′= 4 s
西
蟹
寺
291°30′
331°30′ Var=4°30′w 021°30′
2012-3-17 32 - 5
356°30′
自差测定与计算——方位法
自然叠标选用应注意: 自然叠标选用应注意: ①目标可靠准确多组,易于辨认,且远标要高 目标可靠准确多组,易于辨认, 于近标; 于近标; ②目标的距离要适中,叠标方位敏感性好(与 目标的距离要适中,叠标方位敏感性好( 近标的距离控制在3~ 倍的两标距离内 倍的两标距离内); 近标的距离控制在 ~5倍的两标距离内); ③所处的海区干净、开阔,便于操纵。 所处的海区干净、开阔,便于操纵。
2012-3-17
32 - 20
自差测定与计算——方位法
(4)拨表 ) 测消自差的当天出海前将北京时拨为本地视时, 测消自差的当天出海前将北京时拨为本地视时, 使其与表列时间性质一致。 使其与表列时间性质一致。 若:T△λ所对应的时间 +时差 >0,拨快一个 时差η> , 时差 (T△λ+η); ); 时差η< , 若:T△λ所对应的时间 +时差 <0,拨慢一个 时差 (T△λ+η)。 )。
2012-3-17 32 - 21
自差测定与计算——方位法
(5)注意事项 ) ①消除、测定自差前应先校准好船钟时间。 消除、测定自差前应先校准好船钟时间。 ②太阳高度h<30°观测为好。 太阳高度 < °观测为好。 ③观测太阳时方位圈应水平。 观测太阳时方位圈应水平。 ④方位圈的反射系统应准确。 方位圈的反射系统应准确。 ⑤所预制的太阳方位表时间范围应大于计划时 间范围,最好以列表视时为准,把时间拨到视时。 间范围,最好以列表视时为准,把时间拨到视时。
第四节 自差的测定与计算
目的要求:掌握测定与计算自差的基本方法 目的要求 重点内容:1、太阳方位法测定自差 重点内容 2、自差的计算 难点内容:太阳方位法测定自差 难点内容
2012-3-17
32 - 1
磁罗经自差表
罗航向 0º 10º 20º 30º 40º 45º 50º 60º 70º 80º 90º 100º 110º 120º 130º 135º 140º 150º 160º 170º
2012-3-17
32 - 10