远程对方机器
怎么用cmd远程连接别人的机子

5、这时在“从远端系统强制关机”的属性中便添加了一个“guest”用户,单击“确定”。
6、启动shutdown命令的相关服务:在我的电脑上右键->管理->服务和应用程序->服务->Task Scheduler->选择自动->点启动->点确定。
7、在本机CMD中输入shutdown -s -m \\{对方的ip} -t {你希望倒数的秒数,如10} 即可。
2、在“组策略”窗口的左窗格中打开“计算机配置”—>“Windows 设置”—>“安全设置”—>“本地策略”—>“用户权利指派”。
3、在“组策略”窗口的右窗格中选择“Force shutdown from a remote system (从远端系统强制关机)”,双击。
4、在弹出的对话框中显示目前只有“Administrators”组的成员才有权从远程关机;单击对话框下方的“添加用户或组”按钮,然后在新弹出的对话框中输入“guest”,再单击“确定”。
纯CMD窗口的远程使用Windows系统的方法仅有Telnet而已,或者某些古典式的命令行木马,没有其他方法,并不好用。
如果是UNIX系统,你使用UNIX客户机可以直接登录,那就是正常的用法,无需特别操作。
那么你是想show一下你的黑客技术了?如果你只是想强行关掉别人的机器,在本机上使用shutdown命令即可,具体做法是:
(首先尝试第7步,若失败,再在对方机器上进行1-5步。若是1-5步完成,仍失败,在双方机器上全部进行第6步)(建议读完再尝试,以免某些要点被遗漏。)
1、单击“开始”按钮,选择“运行”,在对话框中输入“gpedit.msc”(Windows家用版没有,无需1-5步,若是第7步失败,参考下面“远程桌面连接”简介中让防火墙“信任”的方法),然后单击“确定”,打开“组策略编辑器”。
远程命令

net start
使用它来启动远程主机上的服务。当你和远程主机建立连接后,如果发现它的什么服务没有启动,而你又想利用此服务怎么办?就使用这个命令来启动吧。用法:net start servername,如图9,成功启动了telnet服务。
接下来就要介绍具体命令的使用方法了。
dir 跟DOS命令一样,用于查看服务器的文件,直接敲上dir回车,就可以看到此ftp服务器上的文件。
cd 进入某个文件夹。
get 下载文件到本地机器。
put 上传文件到远程服务器。这就要看远程ftp服务器是否给了你可写的权限了,如果可以,呵呵,该怎么 利用就不多说了,大家就自由发挥去吧。
net use
把远程主机的某个共享资源影射为本地盘符,图形界面方便使用,呵呵。命令格式为net use x: \IP\sharename。上面一个表示把192.168.0.5IP的共享名为magic的目录影射为本地的Z盘。下面表示和192.168.0.7建立IPC$连接(net use \IP\IPC$ "password" /user:"name"),
最后,由衷的说一句,培养良好的安全意识才是最重要的。
九查自己的址
点“开始”--“运行”,输入“CMD”命令并回车,会出现一个DOS命令的窗口,然后在窗口命令行中输入“ipconfig /all”,回车后,就能看到你的IP地址,还有DNS地址等也可以看到。
5,net user abcd,查看用户名为abcd的用户的情况
机器人的远程操作和监控技术

机器人的远程操作和监控技术随着科技的不断进步,机器人技术也在迅猛发展,从最初的简单机械手臂到现在的人工智能机器人,越来越多的机器人应用于各个领域,如工业制造、医疗、教育等。
而机器人的远程操作和监控技术也因此得到了越来越广泛的应用。
本文将分别介绍机器人的远程操作和监控技术的原理、优势以及应用现状。
一、机器人的远程操作技术机器人的远程操作技术,顾名思义,就是通过网络将机器人控制台与机器人本体进行连接,在远距离上对机器人进行控制和操作。
这种技术早在上个世纪60年代就开始出现,但当时的网络条件和技术水平都比较落后,远程操作所需的延迟时间过长,无法满足实际应用需求。
如今随着网络技术的发展,机器人的远程操作技术已经变得日益成熟,广泛应用于各个领域。
机器人的远程操作技术是通过网络传输控制命令和图像等数据来实现,主要包括通信控制和视频传输两个部分。
通信控制部分可以通过网络将操作员和机器人连接在一起,在远距离上进行机器人的控制和监控;视频传输部分通过网络将机器人拍摄的图像传输回来,使操作员能够实时看到机器人所在位置的环境和情况,从而更好地掌控机器人。
远程操作技术的主要优势在于能够实现远距离、大规模的机器人控制和管理。
比如在危险环境中,可以通过远程操作技术来控制机器人完成一系列的任务,避免人员受到伤害;在制造业中,也可以通过远程操作来控制多个机器人协同工作,提高作业效率。
此外,远程操作技术还可以减少对机器人和设备的维护成本,从而降低整体操作成本。
二、机器人的远程监控技术机器人的远程监控技术是通过网络将机器人的传感器和监控设备与操作员连接在一起,实现远程监控和数据分析的技术。
它可以实时地监测机器人运行状态,从而及时发现和解决机器人故障,提高机器人的运行效率。
远程监控技术的实现需要依赖一系列的传感器和监控设备,如摄像头、温度传感器、压力传感器等,可以对不同类型的机器人进行不同的监控。
在日常应用中,远程监控技术也被广泛用于医疗、教育、工业制造等领域中,可实现精细化的管理和控制,提高整个系统的效率和可靠性。
机器人远程操作说明书
机器人远程操作说明书操作环境要求:- 使用者需要拥有一台连接互联网的电脑或手机设备。
- 确保机器人已经连接到稳定的Wi-Fi网络。
- 安装机器人远程操作软件。
操作步骤:步骤一:登录远程操作软件1. 打开电脑或手机上的机器人远程操作软件。
2. 在登录界面输入您的用户名和密码。
3. 点击"登录"按钮,等待系统验证您的身份。
步骤二:连接机器人1. 登录成功后,系统将显示一个可用机器人列表。
2. 选择您要远程操作的机器人,并点击"连接"按钮。
3. 系统将尝试与机器人建立连接。
步骤三:远程操作机器人1. 连接成功后,您将看到机器人的实时视频画面。
2. 在画面下方有一个控制面板,可以使用该面板来操作机器人。
3. 控制面板通常包含方向控制按钮、摄像头控制按钮等。
步骤四:远程控制机器人移动1. 使用方向控制按钮控制机器人的移动方向。
通常有前进、后退、左转、右转等按钮。
2. 点击相应按钮,机器人将按指定方向移动。
步骤五:远程控制机器人摄像头1. 使用摄像头控制按钮控制机器人的摄像头角度。
2. 点击相应按钮,机器人的摄像头将按照您的指令进行调整。
步骤六:其他远程操作功能1. 根据机器人的型号和功能,您还可以进行其他远程操作。
2. 例如,您可以远程控制机器人的臂部抓取物品,或者开启机器人的声音播放功能等。
3. 在控制面板上查找对应的按钮,并按需操作。
注意事项:1. 在使用远程操作时,请确保机器人周围环境安全,避免损坏周围物品或机器人本身。
2. 当机器人电量低时,及时为机器人充电,避免因电量不足而中断远程操作。
3. 在进行远程操作时,注意遵循相关法律法规和道路交通规则,确保操作安全。
4. 如果遇到操作问题或机器人故障,请及时与售后服务联系。
总结:本远程操作说明书提供了使用机器人远程操作软件的详细操作步骤。
通过登录软件、连接机器人、远程操作机器人等步骤,用户可以方便地控制机器人实现各种功能。
协作机器人技术的远程操作与监控方案

协作机器人技术的远程操作与监控方案随着人工智能和机器人技术的迅速发展,协作机器人在工业生产和服务行业中得到越来越广泛的应用。
协作机器人能够与人类共同劳动,提高生产效率和减轻工人的劳动负担。
然而,由于工作环境的多样性和复杂性,远程操作和监控成为了协作机器人应用的重要需求。
本文将介绍一种可行的协作机器人技术的远程操作与监控方案。
为了实现协作机器人的远程操作,我们需要依托现代通信技术和网络,将机器人与操控终端连接起来,使操作者能够远程操控机器人完成工作任务。
首先,我们可以利用无线通信技术,如Wi-Fi或蜂窝网络,将机器人与操作终端连接起来。
操作者只需使用配备了专门的操控软件的电脑、平板电脑或智能手机,就能够通过网络远程操控机器人。
通过这种方式,无论操作者身处何地,都能够与协作机器人建立起稳定的通信链接。
在协作机器人的远程操作方案中,同时需要考虑到实时性和安全性。
为了保证操作的实时性,我们需要选用低延迟的通信技术和高速稳定的网络连接。
这样,操作者能够实时地监控机器人的状态和工作进度,并能够及时地做出相应的操作。
此外,为了保障操作的安全性,我们需要采用加密和认证等安全措施,防止未授权的人员对机器人进行非法操控。
除了远程操作,协作机器人的监控也是非常重要的。
通过监控,我们可以实时地了解机器人的运行状态,及时发现问题并进行修复,从而提高机器人的稳定性和持续运行能力。
为了实现协作机器人的远程监控,我们可以采用摄像头和传感器等技术设备,将机器人的环境、动作和工作过程实时传输到监控终端。
这样,操作者就能够实时地观察机器人的工作情况,判断是否需要进行调整或干预。
远程操作和监控方案的成功实施还需要考虑到一些实际问题。
首先,可靠的电源供应是协作机器人远程操作和监控的基础。
为了确保机器人能够长时间稳定地工作,我们需要提供可靠的电源系统,并设立有效的电量监控与报警机制。
其次,远程操作和监控涉及到大量的数据传输和处理,因此需要强大的计算和存储能力来支持。
远程控制

4、终端服Байду номын сангаас配置
请依次单击“开始”和“控制面板”,双击“管理工具”,再双击“终端服务配置”。在控制台树中,单击“连接”。在详细信息窗格中,右键单击要配置客户端设备映射的连接,然后单击“属性”。若要使远程桌面也成为多媒体,请在“客户端设置”选项卡下选中“颜色深度的最大值”,并在下拉列表中选择适当的值。“禁用下列项目”下,请不要选中“音频映射”,以使远程桌面也能播放音乐。
在邀请他人协助时,Windows Vista会要求邀请者输入一个最短6位的邀请确认密码,这用来在被邀请方试图连接到系统时验证其身份。这样,当发送出邀请后,Windows Vista会弹出一个注意窗口,等待受邀请者的连接。
被邀请方接到邀请后,首先需要输入邀请者设定的密码,注意,仅仅输入密码并不能完成链接建立过程,这时,在邀请者的PC上将会弹出一个窗口,询问是否允许建立来自对方的远程协助连接,只有邀请者确认后连接才会建立。这在一定程度上可以提高系统安全。
二、远程控制技术的作用:
1.远程办公
通过远程控制功能我们可以轻松的实现远程办公,这种远程的办公方式新颖,轻松,从某种方面来说可以提高员工的工作效率和工作兴趣。
2.远程技术支持
通常,远距离的技术支持必须依赖技术人员和用户之间的电话交流来进行,这种交流既耗时又容易出错。但是有了远程控制技术,技术人员就可以远程控制用户的电脑,就像直接操作本地电脑一样,只需要用户的简单帮助就可以得到该机器存在的问题的第一手材料,很快就可以找到问题的所在,并加以解决。
远程桌面是Windows XP Professional的一个标准组件,它允许你使用任何基于Windows的客户端从任何位置,通过任何连接来访问Windows XP Professional的计算机。远程桌面可让你可靠地使用远程计算机上的所有的应用程序、文件和网络资源,就如同你本人就坐在远程计算机的面前一样。不仅如此,本地(办公室)运行的任何应用程序在你使用远程桌面远程(家、会议室、途中)连接后仍可以正常运行。以下笔者先以场景实例的方式为大家阐述一下如何运用远程桌面实现远程控制。
WINDOWS系统远程桌面连接方法大全
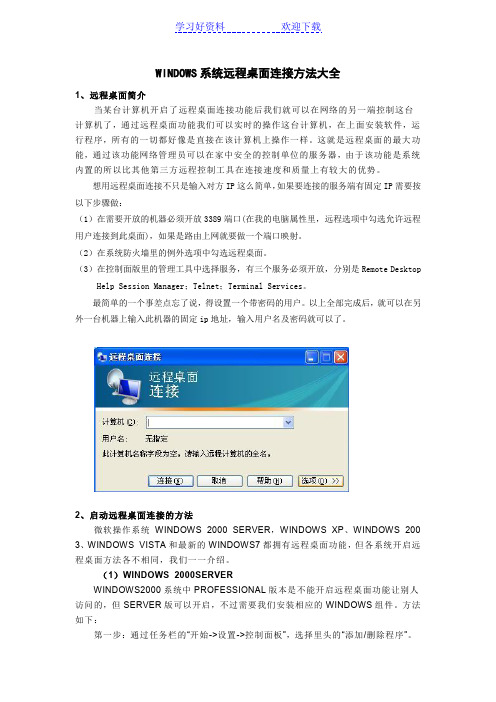
WINDOWS系统远程桌面连接方法大全1、远程桌面简介当某台计算机开启了远程桌面连接功能后我们就可以在网络的另一端控制这台计算机了,通过远程桌面功能我们可以实时的操作这台计算机,在上面安装软件,运行程序,所有的一切都好像是直接在该计算机上操作一样。
这就是远程桌面的最大功能,通过该功能网络管理员可以在家中安全的控制单位的服务器,由于该功能是系统内置的所以比其他第三方远程控制工具在连接速度和质量上有较大的优势。
想用远程桌面连接不只是输入对方IP这么简单,如果要连接的服务端有固定IP需要按以下步骤做:(1)在需要开放的机器必须开放3389端口(在我的电脑属性里,远程选项中勾选允许远程用户连接到此桌面),如果是路由上网就要做一个端口映射。
(2)在系统防火墙里的例外选项中勾选远程桌面。
(3)在控制面版里的管理工具中选择服务,有三个服务必须开放,分别是Remote Desktop Help Session Manager;Telnet;Terminal Services。
最简单的一个事差点忘了说,得设置一个带密码的用户。
以上全部完成后,就可以在另外一台机器上输入此机器的固定ip地址,输入用户名及密码就可以了。
2、启动远程桌面连接的方法微软操作系统WINDOWS 2000 SERVER,WINDOWS XP、WINDOWS 200 3、WINDOWS VISTA和最新的WINDOWS7都拥有远程桌面功能,但各系统开启远程桌面方法各不相同,我们一一介绍。
(1)WINDOWS 2000SERVERWINDOWS2000系统中PROFESSIONAL版本是不能开启远程桌面功能让别人访问的,但SERVER版可以开启,不过需要我们安装相应的WINDOWS组件。
方法如下:第一步:通过任务栏的“开始->设置->控制面板”,选择里头的“添加/删除程序”。
第二步:在左边选择“添加/删除WINDOWS组件”。
第三步:稍后会出现添加删除WINDOWS组件窗口,我们从中选择“终端服务”,然后点“下一步”进行安装。
(整理)灰鸽子远程控制完整详细教程
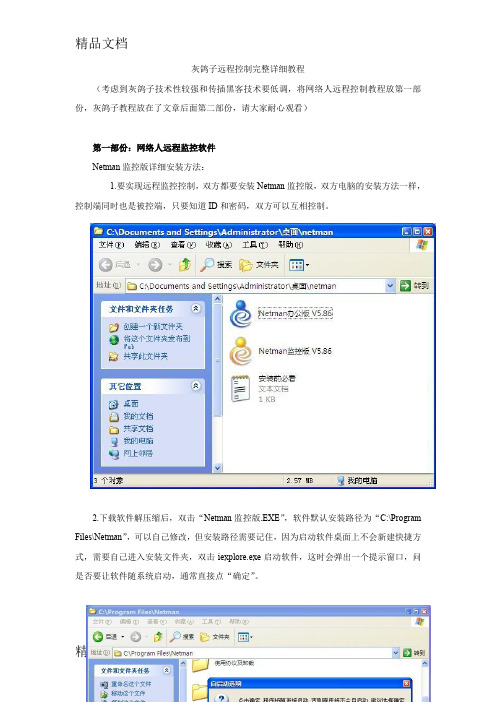
灰鸽子远程控制完整详细教程(考虑到灰鸽子技术性较强和传插黑客技术要低调,将网络人远程控制教程放第一部份,灰鸽子教程放在了文章后面第二部份,请大家耐心观看)第一部份:网络人远程监控软件Netman监控版详细安装方法:1.要实现远程监控控制,双方都要安装Netman监控版,双方电脑的安装方法一样,控制端同时也是被控端,只要知道ID和密码,双方可以互相控制。
2.下载软件解压缩后,双击“Netman监控版.EXE”,软件默认安装路径为“C:\Program Files\Netman”,可以自己修改,但安装路径需要记住,因为启动软件桌面上不会新建快捷方式,需要自己进入安装文件夹,双击iexplore.exe启动软件,这时会弹出一个提示窗口,问是否要让软件随系统启动,通常直接点“确定”。
3.完成以上操作后,再按ctrl+y即可呼出软件主界面。
监控版必须使用会员登录才能实现监控功能,所以呼出主界面后,应点击免费注册会员。
4.注册好会员后,点“选项”-“会员登录”,填上注册好的会员号。
5.第一次使用会员登录时,会弹出“设置控制密码”选项,需要注意的是,这里修改的不是前面填写的“登录密码”,而是从其他电脑连接本电脑时需要输入的“控制密码”。
很多用户会误以为这里是修改“登录密码”,导致第二次使用会员登录时,发现登录密码不正确。
出于安全考虑,网络人设置了“登录密码”与“控制密码”两道密码保护,“登录密码”用于登录会员ID,“控制密码”则是其他电脑想要控制本地电脑时所需要填写的密码。
想要修改这两个密码,可点击“选项”-“修改密码”。
6.设置好密码密码后,点右上角的关闭按扭,软件就会在后台运行,桌面上看不到任何图标和提示。
想要再次操作软件,请按下ctrl+y键。
右上角的关闭按扭只是将软件界面关闭,想要彻底退出软件,应点击左上角的“文件”-“退出”。
很多用户想要卸载软件时,发现无卸载,就是因为没有退出程序造成。
7.有同样的方法在另一台电脑安装Netman监控版并使用另一个会员登录,在“远程IP/ID”处输入对方的会员ID和控制密码,点击“连接”即可连接远程电脑。
远程DWMRCW说明书
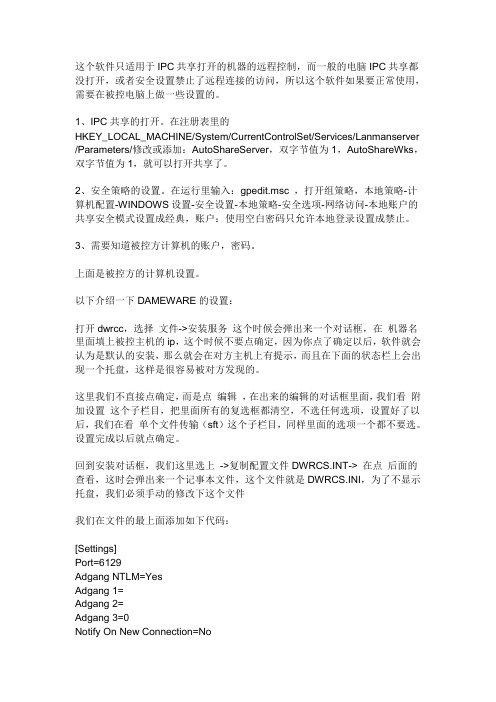
这个软件只适用于IPC共享打开的机器的远程控制,而一般的电脑IPC共享都没打开,或者安全设置禁止了远程连接的访问,所以这个软件如果要正常使用,需要在被控电脑上做一些设置的。
1、IPC共享的打开。
在注册表里的HKEY_LOCAL_MACHINE/System/CurrentControlSet/Services/Lanmanserver /Parameters/修改或添加:AutoShareServer,双字节值为1,AutoShareWks,双字节值为1,就可以打开共享了。
2、安全策略的设置。
在运行里输入:gpedit.msc ,打开组策略,本地策略-计算机配置-WINDOWS设置-安全设置-本地策略-安全选项-网络访问-本地账户的共享安全模式设置成经典,账户:使用空白密码只允许本地登录设置成禁止。
3、需要知道被控方计算机的账户,密码。
上面是被控方的计算机设置。
以下介绍一下DAMEWARE的设置:打开dwrcc,选择文件->安装服务这个时候会弹出来一个对话框,在机器名里面填上被控主机的ip,这个时候不要点确定,因为你点了确定以后,软件就会认为是默认的安装,那么就会在对方主机上有提示,而且在下面的状态栏上会出现一个托盘,这样是很容易被对方发现的。
这里我们不直接点确定,而是点编辑,在出来的编辑的对话框里面,我们看附加设置这个子栏目,把里面所有的复选框都清空,不选任何选项,设置好了以后,我们在看单个文件传输(sft)这个子栏目,同样里面的选项一个都不要选。
设置完成以后就点确定。
回到安装对话框,我们这里选上->复制配置文件DWRCS.INT-> 在点后面的查看,这时会弹出来一个记事本文件,这个文件就是DWRCS.INI,为了不显示托盘,我们必须手动的修改下这个文件我们在文件的最上面添加如下代码:[Settings]Port=6129Adgang NTLM=YesAdgang 1=Adgang 2=Adgang 3=0Notify On New Connection=NoPermission Required=Nohow SysTray Icon=NoPermission Required for non Admin=YesOn Disconnect Logoff Desktop=NoForce Applications Close=NoOn Disconnect Lock Workstation=NoLogon At Logon Desktop Only=NoEnable Add Client Connection Menu=YesEnable Disconnection Menu=Yes完了以后,我们就保存这个文件。
远程控制软件VNC教程对内网机器控制的实现
远程控制软件VNC教程对内网机器控制的实现网络遥控技术是指由一部计算机(主控端)去控制另一部计算机(被控端),而且当主控端在控制端时,就如同用户亲自坐在被控端前操作一样,可以执行被控端的应用程序,及使用被控端的系统资源。
VNC(Virtual Network Computing)最早是一套由AT&T实验室所开发的可操控远程的计算机的软件,其采用了GPL授权条款,任何人都可免费取得该软件。
VNC 软件主要由两个部分组成:VNC server及VNC viewer。
用户需先将VNC server 安装在被控端的计算机上后,才能在主控端执行VNC viewer控制被控端。
(在windows中也由一套著名的网络遥控软件――Symantec公司推出的pcAnywhere。
VNC server与VNC viewer支持多种操作系统,如Unix系列(Unix,Linux,Solaris 等),windows及MacOS,因此可将VNC server 及VNC viewer分别安装在不同的操作系统中进行控制。
如果目前操作的主控端计算机没有安装VNC viewer,也可以通过一般的网页浏览器来控制被控端。
整个VNC一般运行的工作流程如下:(1) VNC客户端通过浏览器或VNC Viewer连接至VNC Server。
(2) VNC Server传送一对话窗口至客户端,要求输入连接密码,以及存取的VNC Server显示装置。
(3)在客户端输入联机密码后,VNC Server验证客户端是否具有存取权限。
(4)若是客户端通过VNC Server的验证,客户端即要求VNC Server显示桌面环境。
(5)被控端将画面显示控制权交由VNC Server负责。
(6) VNC Server将把被控端的桌面环境利用VNC通信协议送至客户端,并且允许客户端控制VNC Server的桌面环境及输入装置。
这里我们使用VNC的升级版,Ultravnc 来说明问题:软件名称: UltraVNC v1.0.10 简繁中文版软件语言:多国语言软件类型:精品软件 / 远程管理授权方式:免费软件运行环境: Win2003, WinXP, Win2000, WinNT, WinME, Win9X软件大小: 829 KB (849,240 字节)UltraVNC 是客户端/服务器软件,允许你经由TCP/IP 连线,控制远端的电脑。
机器人操作的远程控制技术
机器人操作的远程控制技术远程控制技术是指通过无线网络或其他远程通信手段,实现对机器人的远程操控和控制的技术。
随着信息技术和通信技术的迅速发展,远程控制技术在许多领域得到了广泛的应用。
本文将对机器人操作的远程控制技术进行探讨。
一、远程控制技术的概述1.1 远程控制技术的定义远程控制技术是指利用无线通讯和传感技术,通过远程设备对机器人进行远程操控和控制的技术。
它使得机器人的操作不再局限于人与机器人之间的物理接触,能够在远距离范围内实现对机器人的操作和控制。
1.2 远程控制技术的应用领域远程控制技术广泛应用于工业、医疗、军事、探测等领域。
在工业领域,远程控制技术可以实现对生产线上的机器人进行远程监控和操作,提高生产效率和安全性。
在医疗领域,远程控制技术可以实现远程手术,使得医生可以在远处操作机器人完成手术,减少手术风险和时间成本。
二、远程控制技术的技术原理2.1 无线通讯技术远程控制技术离不开无线通讯技术的支持。
通过无线通讯网络,可以将机器人与远程操作设备连接起来,实现双向数据传输和控制命令的传递。
目前常用的无线通讯技术包括蓝牙、Wi-Fi、4G/5G等,这些技术具有传输速度快、距离远等特点,能够满足远程控制的需求。
2.2 传感技术传感技术是远程控制技术的重要组成部分。
通过传感器,可以实时获取机器人的各种数据,如位置、姿态、温度等,将这些数据传输给远程操作设备。
同时,也可以通过远程设备向机器人发送控制命令,实现对机器人的远程操控。
三、远程控制技术的应用案例3.1 工业领域的应用案例在工业领域,远程控制技术可以应用于自动化生产线的操控。
工人可以通过远程操作设备对生产线上的机器人进行远程监控和操作,实时掌握设备运行状态,及时解决故障。
此外,远程控制技术还可以应用于危险环境下的操作,如核电站的维护和清洁。
3.2 医疗领域的应用案例在医疗领域,远程控制技术可以应用于远程手术。
医生可以通过远程操作设备对机器人进行操控,实现对患者的手术操作。
怎样使用灰鸽子远程控制

怎样使用灰鸽子远程控制(考虑到灰鸽子技术性较强和传插黑客技术要低调,将网络人远程控制教程放第一部份,灰鸽子教程放在了文章后面第二部份,请大家耐心观看)第一部份:网络人远程监控软件网络人远程控制个人版分为Netman办公版与Netman监控版。
两个版本主要区别在于:Netman办公版连接远程电脑时,对方会弹出提示,知道电脑正在远程连接,主要用于个人远程控制、远程办公、远程协助和远程桌面连接等方面使用,是一款免费的远程控制软件;Netman监控版使用会员登录后再连接,远程电脑无任何提示,对方不会发觉,主要用于监管孩童电脑,掌握孩子上网情况,保护孩子健康上网。
Netman监控版详细安装方法:1.要实现远程监控控制,双方都要安装Netman监控版,双方电脑的安装方法一样,控制端同时也是被控端,只要知道ID和密码,双方可以互相控制。
2.下载软件解压缩后,双击“Netman监控版.EXE”,软件默认安装路径为“C:\Program Files\Netman”,可以自己修改,但安装路径需要记住,因为启动软件桌面上不会新建快捷方式,需要自己进入安装文件夹,双击iexplore.exe启动软件,这时会弹出一个提示窗口,问是否要让软件随系统启动,通常直接点“确定”。
3.完成以上操作后,再按ctrl+y即可呼出软件主界面。
监控版必须使用会员登录才能实现监控功能,所以呼出主界面后,应点击免费注册会员。
4.注册好会员后,点“选项”-“会员登录”,填上注册好的会员号。
5.第一次使用会员登录时,会弹出“设置控制密码”选项,需要注意的是,这里修改的不是前面填写的“登录密码”,而是从其他电脑连接本电脑时需要输入的“控制密码”。
很多用户会误以为这里是修改“登录密码”,导致第二次使用会员登录时,发现登录密码不正确。
出于安全考虑,网络人设置了“登录密码”与“控制密码”两道密码保护,“登录密码”用于登录会员ID,“控制密码”则是其他电脑想要控制本地电脑时所需要填写的密码。
r如何远程连接到另外一台电脑

要想使用宿舍的机器控制家里的机器关机,要用另外的办法,稍后叙述。
这样的远程登录方式,可以使你在任何地方,都能控制使用你家里的电脑。哪怕你在国外,也完全可以使用你家里的这台电脑。我试验过的。我在美国的时候,连接起来不太困难,但要操作作点事情,比如编辑文档什么的操作,还是有几秒至十几秒的延迟的,而且感觉不习惯。有点别扭。也许与我当时用的网络服务商的网速有关。
这个时候,宿舍的机器开始按这个IP地址,在整个INTERNET 上搜索你家里的那台机器,找到后,就会开始连接。当连接成功后,会变成一个黑屏幕的画面,只在屏幕的最上方,有一个指示条,指示着机器是在远程登录的状态。当你家里的机器,响应了宿舍的机器的远程登录请求之后,会给你返回一个画面,要求你输入 用户名,密码。
家里的机器这样设置,就算完了。
放假后回到学校宿舍以后,在宿舍的机器不需要作什么设置,只要直接登录家里的机器就行了,登录的过程:
4:鼠标左键点 开始 -> 所有程Байду номын сангаас -> 附件 -> 通讯 -> 远程桌面连接 -> 在弹出的窗口里,输入你记录下的家里机器的 IP 地址 -> 点“连接”按钮。
最后叙述一下,当你远程使用完家里的机器后,如何在你学校宿舍控制他关机。
在你家里的计算机上设置:打开“附件”中的 “windows 资源管理器”,找到 WINDOWS 的文件夹,进入 “SYSTEM32”的文件夹,找到“taskmgr.exe”这个文件,鼠标右键点他,把他发送到桌面上建一个“桌面快捷方式”就行了。
但这样的远程连接,也是有条件的:你家里的机器,必须有独立的 IP ,也就是说,你家里的机器不能是局域网的内部保留 IP,(所谓保留IP,是指诸如 10.XXX.XXX.XXX 或者 192.168.XXX.XXX 等这样的地址)。如果你家里的机器,用的是ADSL,一般来说,都是独立的IP,但如果你们几户人家共用一个 ADSL宽带连接,通过一个ADSL共同上网的,那或许就不行了。也许没法使用这个远程登录。必须在路由器上作一个“端口映射”设置。有关这个问题,搜索一下网上的文章,不同牌号的路由器,有具体不同的设置办法。
远程操控机器人的技术和应用

远程操控机器人的技术和应用随着科技的不断发展,机器人技术也越来越成熟。
近年来,远程操控机器人已经成为一个备受关注的领域。
远程操控机器人是指通过远程遥控来操作机器人,将其放置在危险或无法到达的场所进行工作。
本文将探讨远程操控机器人的技术原理和应用场景。
一、技术原理远程操控机器人的技术原理主要包括远程操作、传输和控制三个方面。
1.远程操作远程操作即通过遥控器对机器人进行操控。
一般遥控器由摇杆、按键和滚轮组成,使用者可以通过遥控器来对机器人进行各种操作,比如移动、操作机械臂等。
遥控器可以通过无线电波或者红外线等信息传输方式来实现远程操作。
2.传输机器人需要进行实时传输信号以实现远程操作。
在远程操控机器人时,传输方式先决于控制距离,若在日常居住环境中,则大多为Wi-Fi控制,而若是在野外,则可采用移动通信网络进行信号传输,以便在更远距离实现机器人的控制和操作。
3.控制在远程操控机器人时,控制是关键因素之一。
控制的主要内容为机器人行进路线、人机交互模式、回传信号等。
机器人的控制需要相应的控制器。
根据机器人功能和实际需求制作出的控制器,可以进行遥控操作、自动化控制或语音指令控制。
二、应用场景远程操控机器人可以在很多领域中发挥作用,如环境监测、紧急救援、工业制造等。
1.环境监测远程操控机器人在环境监测中有着广泛的应用。
比如空气质量检测,机器人在城市中进行检测,可以采集空气质量数据,避免环境污染。
另外,机器人还可以用来监测海拔、温度等其他数据。
2.紧急救援远程操控机器人在紧急救援中也可以发挥作用。
在人员不能进入的极端条件下,遥控机器人可以展开搜救,而机器人不但在搜救中具有时间优势,而且能在危险环境中为人类提供安全保障。
3.工业制造远程操控机器人在工业制造领域也有广泛的应用。
比如在电子工厂的自动化生产线上,机器人可以用来完成危险和重复的任务,提高工作效率。
另外,机器人还可以在实验室中被用来进行化学实验、制造小型工具等。
机器人操作中的远程控制技巧
机器人操作中的远程控制技巧随着科技的快速发展,机器人在各个领域中的应用越来越广泛,远程控制技术也逐渐成为机器人操作中的重要组成部分。
远程控制技巧能够让人们在无需现场操作的情况下,通过网络或其他通信方式控制机器人的移动、操作和执行任务等。
本文将介绍几种常用的机器人远程控制技巧,帮助读者更好地理解和应用远程控制技术。
首先,基于网络的远程控制技巧是目前应用最广泛的一种。
通过网络远程控制,人们可以利用电脑或智能手机等设备实时监控机器人的运动、获得机器人传感器的数据,并且能够通过操作界面实现对机器人的远程操控。
这种技巧在各种领域中都有广泛应用,例如,医疗机器人可以通过网络远程控制实现远程手术,工业机器人可以通过网络远程控制进行危险环境下的操作等。
使用基于网络的远程控制技巧时,需要保证网络的稳定性和安全性,以免出现信号延迟或被黑客攻击等问题。
其次,基于无线通信的远程控制技巧也是常见的一种方式。
通过无线通信技术,人们可以将机器人与遥控器或控制器进行配对,实现对机器人的遥控操作。
这种技巧通常应用于玩具机器人、无人机等消费类产品中。
无线通信技术的发展使得远程控制距离更远、操作更灵活,但同样需要保证信号的稳定性。
在使用无线通信远程控制技巧时,需要避免其他无线设备对信号的干扰,以确保远程控制的顺利进行。
此外,基于虚拟现实技术的远程控制也在机器人操作中得到了越来越广泛的应用。
虚拟现实技术能够创造出逼真的虚拟环境,并通过佩戴虚拟现实设备的方式,将操作者的感知与机器人的操作相结合。
使用虚拟现实技术进行远程控制,可以提供更直观、沉浸式的操作体验,使操作者感觉就像是真实地站在机器人旁边进行操作一样。
这种技巧主要应用于危险环境下的作业,例如矿井勘察、火灾救援等。
使用虚拟现实技术的远程控制,需要确保虚拟现实设备与机器人的数据和信号同步,以实现精确的操作。
值得一提的是,远程控制技巧中的安全性也是非常重要的一点。
随着远程控制技术的广泛应用,人们对机器人远程控制的安全性和隐私保护提出了更高的要求。
机器人远程控制操作指南的说明书

机器人远程控制操作指南的说明书操作指南欢迎使用本机器人远程控制系统。
本指南将向您介绍如何使用远程控制系统来操纵机器人。
请按照以下步骤进行操作。
1. 连接机器人首先,确保您的机器人已正确连接到远程控制系统。
将机器人与控制系统的无线网络进行配对。
确保机器人和控制系统处于同一网络环境下。
2. 打开控制系统启动控制系统,并确保其与机器人连接成功。
您可以通过输入机器人的IP地址或扫描机器人上的二维码来连接机器人。
3. 手动控制在控制系统界面上,您可以看到机器人的各项功能按钮。
通过点击相应按钮,您可以手动控制机器人的移动、摄像头的旋转以及其他预设功能。
4. 远程控制除了手动控制外,您还可以通过远程控制机器人。
在控制系统界面上,您可以看到一个远程控制模式按钮。
点击该按钮,然后选择您想要远程控制机器人的方式。
5. 视频传输在远程控制模式下,您可以实时观看机器人的视频传输。
您可以通过控制系统界面上的摄像头控制按钮调整摄像头的角度,以获得最佳视角。
同时,系统还支持截图和录制视频的功能。
6. 路径规划远程控制系统还支持机器人的路径规划功能。
您可以在控制系统界面上点击路径规划按钮,并在地图上指定机器人应该前往的目的地。
系统将自动生成最佳路径,并指导机器人自动前往。
7. 安全控制为了保证机器人操作的安全性,远程控制系统还具备安全控制功能。
您可以在系统界面上设置机器人的运动范围、速度以及特定区域的禁入区等。
通过合理设置这些参数,可以确保机器人在操作过程中不会造成危险。
8. 系统设置控制系统还提供了一些个性化设置选项供用户选择。
您可以根据需要调整系统语言、界面主题和声音提示等。
系统还可以记录机器人的操作日志,方便您进行后期分析和调整。
总结机器人远程控制操作指南为用户提供了一份详细的使用手册。
通过本指南,用户可以了解到如何连接机器人、手动控制、远程控制、视频传输、路径规划、安全控制以及系统设置等相关功能。
希望本指南能够帮助用户顺利使用远程控制系统,并充分发挥机器人的各项功能。
机器人远程遥控技术研究
机器人远程遥控技术研究一、前言随着现代化科技的飞速发展,机器人越来越为人们所关注。
机器人远程遥控技术是机器人技术的重要部分,它将机器人与远程操控相结合,实现了远距离操作机器人的目的,具有广泛的应用前景。
在这篇文章中,我们将探讨机器人远程遥控技术的研究。
二、机器人远程遥控技术的概念传统的机器人操控都是直接由人手动操作机器人,这不仅需要人工,而且需要操作者具有一定的技术功底,受控制的范围也受到限制。
而机器人远程遥控技术则通过使用遥控器、电脑等远距离控制设备,将机器人的操作交给遥远的操控者,达到无需现场操作的目的。
机器人远程遥控技术简单地可以看作是将遥控设备和机器人连接起来,实现在遥远之地对机器人的操纵,部分远程机器人甚至可以实现控制无人区的操作。
这项技术不仅避免了人员因任务环境恶劣而受到危险,还实现了对机器人的集中操控,提高生产效率和工作安全。
三、机器人远程遥控技术的原理机器人远程遥控技术的实现需要将遥控设备与机器人连接,完成数据传输与操作指令的交互。
这通常需要通过无线电、互联网等远距离通信方式实现。
同时,机器人系统也需要具备足够的自主性,在缺少遥控信号时仍能完成基本的操作功能。
远程遥控设备还可以通过传输音视频信号,与人员进行实时交流,实现更加精准的操纵。
四、机器人远程遥控技术的应用机器人远程遥控技术在工业、医疗、军事、探险等领域都有着广泛的应用。
其不仅可以实现无人化作业,避免危险环境下的人员伤亡,而且还可以提高作业效率和安全性。
1. 工业领域机器人远程遥控技术在工业领域的应用非常广泛。
通过将机器人操控交给远程操控者,不仅可以避免施工现场不可控的风险,而且还可以提高工作效率和精度。
例如,可在危险的建筑物、桥梁、电站、化工厂或核电站等区域完成基础施工和维护工作。
特别的,应用于远程卧式钻机的遥控,实现在复杂煤层中进行精确井下作业,大大提高了采煤效益。
另外,达到一定的自主性的机器人还可以在非人为干涉下完成机器人对产品进行加工和制造。
机器人的远程操作

机器人的远程操作机器人的远程操作是指通过网络连接,使远程用户能够操控机器人来完成各种任务。
这一技术已经广泛应用于各个领域,如医疗、教育、工业等,为人们带来了许多便利和机会。
本文将从不同角度探讨机器人的远程操作。
一、远程操作技术的意义远程操作技术打破了时间和空间的限制,使人们能够远距离操作机器人。
这对于一些特殊领域有着巨大的意义。
比如,在医疗领域,远程手术机器人可以让专家在全球范围内为患者进行手术,解决了地域限制和医生资源不足的问题。
在教育领域,远程操作机器人可以实现远程教学,让学生能够接触到更广泛的教育资源。
远程操作技术还可以应用于工业领域,提高生产效率和安全性。
二、远程机器人的应用领域1. 医疗领域远程手术机器人可以让医生不受地域限制,为患者进行手术。
医生通过网络连接,操作机器人完成手术过程。
这样可以确保手术的准确性和安全性。
同时,远程手术机器人还能够提供高清晰度的视觉和超强的精确操作,使医生能够更好地进行手术。
2. 教育领域远程操作机器人可以实现远程教学。
老师可以通过网络连接,操控机器人在远程进行授课。
学生通过机器人的摄像头和音频设备可以与老师进行实时互动。
这种方式不受地域限制,让学生能够接触到更广泛的学习资源,提高教育的质量和效果。
3. 工业领域远程操作机器人可以应用于工业生产线。
工人通过网络连接,远程操作机器人进行生产和装配。
这样可以提高生产效率和安全性,减少人力成本和工伤风险。
远程操作机器人还可以应用于危险环境和有害物质处理,保障工人的安全。
三、远程机器人的挑战和解决方案1. 网络稳定性远程操作机器人需要依赖稳定的网络连接,但在某些地区和环境下,网络连接可能不稳定或中断。
为了解决这个问题,可以采用多重通信通道、备用网络和数据压缩技术等,以确保远程操作的顺利进行。
2. 安全性远程操作机器人需要确保数据传输和操作过程的安全性。
采用加密、身份验证和访问权限管理等技术,可以有效保护数据和操作的安全性,防止未经授权的访问和操作。
被远程控制的机器(肉鸡)详谈

被远程控制的机器(肉鸡)详谈推荐文章企业网络基本搭建及网络管理热度:电脑安全防护出现问题_电脑安全防护出现问题如何解决热度:如何策略使用加密狗进行加密热度: CAD-计算机辅助技术热度:可被简单解决的安全疏漏及防范热度:本文向大家介绍“肉鸡”远程攻击,可能好多人还不了解“肉鸡”远程攻击,没有关系,看完本文你肯定有不少收获,希望本文能教会你更多东西什么是电脑“肉鸡”所谓电脑肉鸡,就是拥有管理权限的远程电脑。
也就是受别人控制的远程电脑。
“肉鸡”可以是各种系统,如win,Linux,unix等;更可以是一家公司企业学校甚至是政府军队的服务器,一般所说的“肉鸡”是一台开了3389端口的Win2K系统的服务器,所以3389端口没必要开时关上最好。
要登陆“肉鸡”,必须知道3个参数:远程电脑的IP、用户名、密码。
说到“肉鸡”,就要讲到远程控制。
远程控制软件例如灰鸽子、上兴等。
肉鸡不是吃的那种,是中了木马,或者留了后门,可以被远程操控的机器,现在许多人把有WEBSHELL 权限的机器也叫肉鸡。
谁都不希望自己的电脑被他人控制,但是很多人的电脑是几乎不设防的,很容易被远程攻击者完全控制。
你的电脑就因此成为别人砧板上的肉,别人想怎么吃就怎么吃,“肉鸡”(机)一名由此而来。
如何检测自己是否成为“肉鸡”注意以下几种基本的情况:1:QQ、MSN的异常登录提醒 (系统提示上一次的登录IP不符)2:网络游戏登录时发现装备丢失或与上次下线时的位置不符,甚至用正确的密码无法登录。
3:有时会突然发现你的鼠标不听使唤,在你不动鼠标的时候,鼠标也会移动,并且还会点击有关按钮进行操作。
4:正常上网时,突然感觉很慢,硬盘灯在闪烁,就象你平时在COPY文件。
5:当你准备使用摄像头时,系统提示,该设备正在使用中。
6:在你没有使用网络资源时,你发现网卡灯在不停闪烁。
如果你设定为连接后显示状态,你还会发现屏幕右下角的网卡图标在闪。
7:服务列队中出可疑程服务。
使用telnet命令访问远程计算机
使用telnet命令访问远程计算机用户使用telnet命令进行远程登录。
该命令允许用户使用telnet协议在远程计算机之间进行通信,用户可以通过网络在远程计算机上登录,就像登录到本地机上执行命令一样。
为了通过telnet登录到远程计算机上,必须知道远程机上的合法用户名和口令。
虽然有些系统确实为远程用户提供登录功能,但出于对安全的考虑,要限制来宾的操作权限,因此,这种情况下能使用的功能是很少的。
当允许远程用户登录时,系统通常把这些用户放在一个受限制的shell中,以防系统被怀有恶意的或不小心的用户破坏。
用户还可以使用telnet从远程站点登录到自己的计算机上,检查电子邮件、编辑文件和运行程序,就像在本地登录一样。
但是,用户只能使用基于终端的环境而不是X Wndows环境,telnet只为普通终端提供终端仿真,而不支持 X Wndow等图形环境。
telnet命令的一般形式为:telnet 主机名/IP 其中“主机名/IP”是要连接的远程机的主机名或IP地址。
例:telnet 192.168.0.1如果这一命令执行成功,将从远程机上得到login:提示符。
使用telnet命令登录的过程如下:$ telnet 主机名/IP 启动telnet会话。
一旦telnet成功地连接到远程系统上,就显示登录信息并提示用户输人用户名和口令。
如果用户名和口令输入正确,就能成功登录并在远程系统上工作。
在telnet提示符后面可以输入很多命令,用来控制telnet会话过程,在telnet联机帮助手册中对这些命令有详细的说明。
下面是一台Linux计算机上的telnet会话举例:$ telnet server. somewhere. com Trying 127.0.0.1… Connected to serve. somewhere. com. Escape character is \';?]\';. “TurboLinux release 4. 0 (Colgate) kernel 2.0.18 on an I486login: bubba password: Last login:Mon Nov l5 20:50:43 for localhost Linux 2. 0.6. (Posix). server: ~$ server: ~$ logout Connection closed by foreign host $用户结束了远程会话后,一定要确保使用logout命令退出远程系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
这句是什么意思,,?
将对方的IP及电脑名按以下格式写入文件: XX.XX.XX.XX 电脑名
意思就是说把你本机的windows目录下的一个叫LMHOSTS.SAM文件先改名为LMHOSTS(注意没有扩展名)。然后建一个文件内容是XX.XX.XX.XX 电脑名,名字为LMHOSTS.SAM
远程对方机器
1.取得对方IP地址如XX.XX.XX.XX,方法太多不细讲了。
2.判断对方上网的地点,开个DOS窗口键入 TRACERT XX.XX.XX.XX 第4和第5行反映的信息既是对方的上网地点。
3.得到对方电脑的名称,开个DOS窗口键入 NBTSTAT -A XX.XX.XX.XX 第一行是对方电脑名称第二行是对方电脑所在工作组 第三行是对方电脑的说明
4.在Windows目录下有一文件名为LMHOSTS.SAM,将其改名为LMHOSTS,删除其内容,将对方的IP及电脑名按以下格式写入文件: XX.XX.XX.XX 电脑名
5.开DOS窗口键入 NBTSTAT -R
6.在开始-查找-电脑中输入对方电脑名,出现对方电脑点击即可