ROBOT 远程控制
希美埃 GR 系列喷涂机器人 远程协助手册说明书

GR系列喷涂机器人远程协助手册资料编号:ZL-GR-004-V1发布日期:2020年1月本手册版权归希美埃(芜湖)机器人技术有限公司所有仅供客户使用,未经授权禁止其他用途使用希美埃(芜湖)机器人技术有限公司安徽省芜湖市鸠江经济开发区万春东路96号电话:400-052-8877CMA希美埃(芜湖)机器人技术有限公司智能化喷涂装备提供商声明感谢您购买希美埃(芜湖)机器人技术有限公司(以下简称“CMA”)喷涂机器人产品。
本文所提及的内容关系到您的安全以及合法权益与责任。
使用本产品之前,请仔细阅读本文,确保已对产品进行正确的设置。
不遵循或不按照本文的说明与警告来操作可能会给您和周围的人带来伤害,损坏CMA 机器人或其它周围的物品。
本文档及所有相关的文档最终解释权归CMA所有。
本手册作为操作指导,但不构成对使用机器人整个应用系统的担保。
因此CMA公司不对使用此系统而可能导致的事故、损害和(或)工业产权相关的问题承担责任。
CMA公司郑重建议:在赋予操作者机器人的使用权限以前,所有参与机器人操作、示教、维护、维修、点检的人员、都参加CMA公司准备的培训课程。
版权与商标本手册版权归希美埃(芜湖)机器人技术有限公司所有,仅供客户使用,未经希美埃(芜湖)机器人技术有限公司书面许可,本部分不能被复制或向第三方披露。
本文档必须保存在机器人的使用寿命期间,损坏或丢失的情况下,你可以订购一个替换的副本。
在机器人被出售或转移到一个新的所有者时,您被要求告知希美埃(芜湖)机器人技术有限公司新的拥有者的地址。
本手册为全套手册的其中一册,所有参与机器人使用、编程、维护、维修、点检的人员,必须经过完整手册的培训,全套手册如下:☐ZL-GR-001-V1:GR系列喷涂机器人《安全手册》☐ZL-GR-002-V1:GR系列喷涂机器人《日常保养手册》☐ZL-GR-003-V1:GR系列喷涂机器人《防爆使用手册》☑ZL-GR-004-V1:GR系列喷涂机器人《远程协助手册》☐ZL-GR-005-V1:GR系列喷涂机器人《IO通讯手册》☐ZL-GR-006-V1:GR系列喷涂机器人《软件编程手册》☐ZL-GR6100-001-V1:GR6100机器人《安装和连接手册》☐ZL-GR6100-002-V1:GR6100机器人《机械维护手册》☐ZL-GR6100-003-V1:GR6100机器人《电气维护手册》☐ZL-GR6100-004-V1:GR6100机器人《电气原理图》本手册及所有相关的手册最终解释权归希美埃(芜湖)机器人技术有限公司所有,希美埃(芜湖)机器人技术有限公司保留随时停止生产或更改设计或规格的权利,如有更新,恕不另行通知。
ABB机器人操作手册(中文版)[6]
![ABB机器人操作手册(中文版)[6]](https://img.taocdn.com/s3/m/0e4a74cc9f3143323968011ca300a6c30c22f127.png)
ABB机器人操作手册(中文版)ABB操作手册(中文版)一、概述本手册介绍了ABB的基本功能、结构、组成部分、工作原理、操作方法和注意事项。
本手册适用于ABB公司生产的多种型号的,包括IRB 120、IRB 140、IRB 1600、IRB 2600、IRB360等。
本手册旨在帮助操作者和维护人员熟悉的性能和特点,掌握正确的操作和维护技能,提高的使用效率和寿命。
二、的功能和结构2.1 的功能可以根据预设的程序或实时的指令,自动或半自动地完成各种工作动作,如抓取、移动、放置、装配、焊接、喷涂、打磨等。
可以通过不同的末端执行器(如夹具、焊ABB操作手册(中文版)概述控制柜:控制柜是ABB的核心部件,负责控制的运动、通信、安全和诊断等功能。
控制柜内部包含了电源模块、主控制器、驱动单元、输入/输出模块等组件。
机械臂:机械臂是ABB的执行部件,由多个关节和连杆构成,能够在空间中进行多自由度的运动。
机械臂上安装了各种传感器和编码器,用于测量和反馈机械臂的位置、速度、加速度、温度等参数。
工具:工具是ABB的作业部件,根据不同的任务需求,可以安装在机械臂的末端。
工具可以是各种类型的,如夹具、焊枪、喷枪、摄像头等。
工具与控制柜之间通过工具接口进行连接和通信。
操作盘:操作盘是ABB的交互部件,用于与用户进行信息输入和输出。
操作盘上有显示屏、按键、开关、指示灯等元件,可以显示的状态、报警、菜单等信息,也可以用于设置参数、启动/停止程序、切换模式等操作。
RobotStudio:RobotStudio是ABB的仿真软件,可以在计算机上模拟和测试的运行情况。
RobotStudio可以实现与实际相同的功能,如编程、调试、优化等。
RobotStudio还可以与其他软件进行集成,如CAD/ CAM、PLC等。
安装确认安装场地的条件,如空间尺寸、地面平整度、电源供应等。
确认安装设备的清单,如控制柜、机械臂、工具、电缆等。
确认安装工具的清单,如螺丝刀、扳手、千斤顶等。
EPSON机器人远程io说明
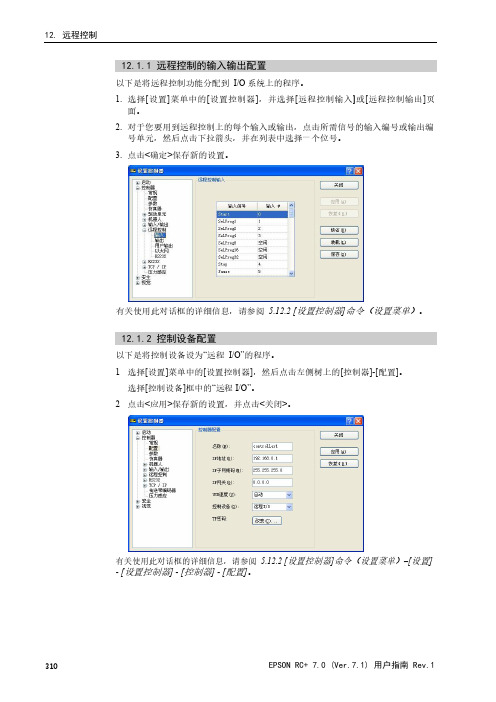
12.1.1远程控制的输入输出配置以下是将远程控制功能分配到I/O系统上的程序。
1.选择[设置]菜单中的[设置控制器],并选择[远程控制输入]或[远程控制输出]页面。
2.对于您要用到远程控制上的每个输入或输出,点击所需信号的输入编号或输出编号单元,然后点击下拉箭头,并在列表中选择一个位号。
3.点击<确定>保存新的设置。
有关使用此对话框的详细信息,请参阅 5.12.2[设置控制器]命令(设置菜单)。
12.1.2控制设备配置以下是将控制设备设为“远程I/O”的程序。
1.选择[设置]菜单中的[设置控制器],然后点击左侧树上的[控制器]-[配置]。
选择[控制设备]框中的“远程I/O”。
2.点击<应用>保存新的设置,并点击<关闭>。
有关使用此对话框的详细信息,请参阅 5.12.2[设置控制器]命令(设置菜单)–[设置] -[设置控制器]-[控制器]-[配置]。
■远程状态输出(如MotorOn,Home等)会在Teach模式ON时运行,即使在切断启用开关(控钮开关)时也是如此。
因此,不要使用远程状态输出来驱动任何设备,因其会造成动作或任何其他安全隐患。
12.1.3自动模式下使用远程控制使用远程控制以自动循环运行1.主机设备(如PLC)应在发出远程命令之前等待打开AutoMode或Ready远程输出。
2.现在,将接受远程输入命令。
从EPSON RC+7.0操作窗口中监控远程操作1.将EPSON RC+7.0启动模式设置为自动。
有关详情,请参阅4.2.3启动模式。
2.还应配置PC以自动登录到Windows中并在Windows启动过程中启动EPSONRC+7.0。
请参阅4.2.7自动启动。
12.1.4示教模式下使用远程控制在示教模式下使用远程控制时,不可以使用远程输入命令。
远程状态输出仍然会运行。
您可以使用TeachMode远程输出来监控示教模式状态。
12.1.5调试远程控制您可以使用远程控制从EPSON RC+7.0开发环境中调试程序。
TCR说明书正文1
TCR说明书正文1第一章概述1.1 产品简介本TCR(Temperature Control Robot)是一种温度控制机器人,旨在为用户提供全天候的温度监测和调控服务。
通过使用该机器人,用户能够实时监测温度变化并采取相应的控制措施,确保环境温度的稳定性。
1.2 产品特点- 高精度测温:TCR采用先进的温度传感器技术,能够以高精度测量当前环境温度,并在需要时自动调整温度。
- 远程控制:用户可以通过手机App或电脑登陆控制平台,实现对TCR的远程监控和控制,方便快捷。
- 智能学习能力:TCR具有智能学习能力,能够根据用户的习惯和需求进行自主调控,并逐渐形成个性化的温度控制方案。
- 多项安全保护:TCR内置多种安全保护机制,如过温保护、电源短路保护等,保障用户使用的安全性。
第二章使用方法2.1 安装与连接- 将TCR放置在所需控制的区域,确保周围环境干净整洁。
- 将TCR与电源适配器连接,并将适配器插入电源插座。
- 打开手机App或电脑控制平台,按照提供的操作步骤完成与TCR 的连接。
2.2 温度监测- 在手机App或电脑控制平台上,进入温度监测界面,即可实时查看当前环境的温度。
- TC在监测过程中会以图表的形式展示历史温度变化趋势,帮助用户了解环境的温度变化情况。
2.3 温度调控- 用户可以手动设定温度范围,在该范围内,当环境温度超出设定范围时,TCR将自动启动温度调控机制。
- 当TCR启动温度调控时,用户可以选择自动模式或手动模式进行温度控制。
- 在自动模式下,TCR根据学习到的数据和算法,自主调整环境温度以达到设定目标。
- 在手动模式下,用户可以根据需求手动调整TCR的温度设置。
第三章注意事项3.1 使用环境- TCR适用于室内环境,不适用于户外使用。
- 使用TCR的环境应保持干燥、清洁,避免杂物堵塞机器人的散热孔。
3.2 电源与电源适配器- TCR的电源适配器应使用原装适配器,避免使用不合适的充电器以免发生电源问题。
机器人无线远程控制系统的人机接口_王晓亨
中图分类号:TP393 文献标识码:A 文章编号:1009-2552(2007)01-0001-03机器人无线远程控制系统的人机接口王晓亨,陆宇平(南京航空航天大学自动化学院,南京210016)摘 要:在无线局域网环境中,建立了一套以移动机器人为控制对象的、模拟Internet传输特征的远程控制技术研究平台。
通过可视化的人机接口界面,可以直接向远端机器人发送控制指令,并能看到反馈的状态数据;还可通过手柄控制,语音控制、命令集可编程接口等方式控制机器人。
最后的开发实例具有操作简便、界面友好、易于扩展等特点。
关键词:人机接口;Speec h API;机器人Man-machine interface of robot wirless remotedistance control systemWANG Xiao-heng,LU Yu-ping(College of Auto mation,Nanjing University of Aeronautics and Astronautics,Nanjing210016,C hina) Abstract:The research platform of remote distance control technology of simulating the characters of Internet communication is established in wireless local area network.The operators can directly send control instr uc-tions to the remote robot,and vie w the feedbacked state data through the visualized man-machine interface, also can control the r emote robot by handle c ontr ol,speech control,pr ogrammable command sets and so on.The instance has some advantages such as convenient operation,friendly interface,adapted extension.Key words:man-machine interface;Speech API;robot0 引言近年来,基于Internet的远程控制技术是一个研究热点,随着无线网络技术的发展和日益成熟,使得基于无线网络的远程控制技术的研究得到了极大的关注。
ROBOT操作入门

ROBOT操作入门ROBOT操作入门1. 简介ROBOT(Remote Open Bionics Operating System)是一种远程操作的操作系统。
它提供了丰富的功能和灵活的操作方式,使用户能够轻松地控制和操作。
本文档将介绍ROBOT的基本操作入门,帮助读者快速上手。
2. 安装ROBOT要开始使用ROBOT,需要将其安装在您的操作系统上。
以下是安装ROBOT的步骤:1. ROBOT安装包:您可以从ROBOT官方网站最新的ROBOT安装包。
2. 解压安装包:将的安装包解压到您选择的目标文件夹中。
3. 配置环境变量:打开终端或命令提示符,将ROBOT安装路径添加到您的系统环境变量中。
完成上述步骤后,ROBOT就已经成功安装在您的系统中了。
3. 连接ROBOT在开始操作ROBOT之前,您需要先将ROBOT与您的设备进行连接。
以下是连接ROBOT的步骤:1. 打开ROBOT控制面板:在您的设备上启动ROBOT控制面板。
2. 选择连接方式:ROBOT支持多种连接方式,包括USB连接和Wi-Fi连接。
根据您的实际情况选择合适的连接方式。
3. 输入连接信息:根据选择的连接方式,输入相应的连接信息,如IP地质、端口号等。
完成上述步骤后,ROBOT就会与您的设备成功连接。
4. 控制ROBOTROBOT提供了多种方式来控制的运动和操作。
以下是一些常用的控制方式:4.1. 通过控制面板控制ROBOT的控制面板提供了直观的可视化界面,可以通过按钮、拖动滑块等方式来控制的动作。
您可以根据的实际情况选择相应的动作和控制方式。
4.2. 通过命令行控制ROBOT还支持通过命令行来控制。
您可以使用命令行工具,发送指令给ROBOT控制系统,实现的运动和操作。
以下是一些常用的命令行指令:- `robot.move(forward)`: 使向前移动。
- `robot.move(backward)`: 使向后移动。
- `robot.turn(left)`: 使向左转向。
基于物联网的ABB工业机器人远程控制系统设计
基于物联网的 ABB 工业机器人远程控制系统设计摘要:工业机器人传统的控制通常通过示教器或者PLC进行控制,但传统控制方式受距离空间限制,适合近距离控制,很难对机器人进行远程控制。
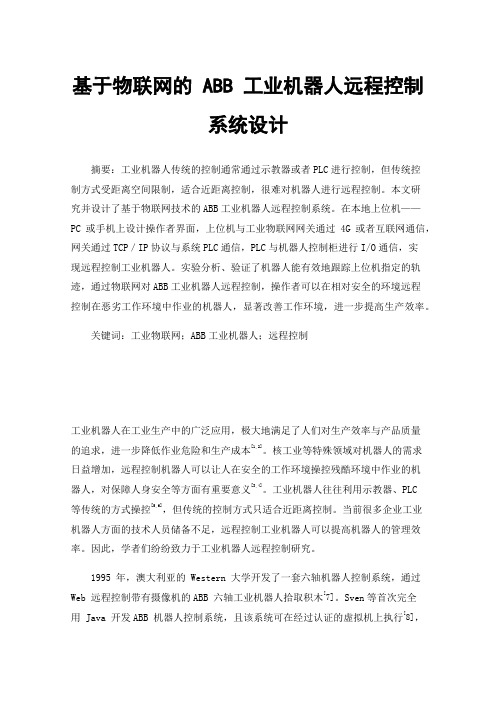
本文研究并设计了基于物联网技术的ABB工业机器人远程控制系统。
在本地上位机——PC或手机上设计操作者界面,上位机与工业物联网网关通过4G或者互联网通信,网关通过TCP/IP协议与系统PLC通信,PLC与机器人控制柜进行I/O通信,实现远程控制工业机器人。
实验分析、验证了机器人能有效地跟踪上位机指定的轨迹,通过物联网对ABB工业机器人远程控制,操作者可以在相对安全的环境远程控制在恶劣工作环境中作业的机器人,显著改善工作环境,进一步提高生产效率。
关键词:工业物联网;ABB工业机器人;远程控制工业机器人在工业生产中的广泛应用,极大地满足了人们对生产效率与产品质量的追求,进一步降低作业危险和生产成本[1,2]。
核工业等特殊领域对机器人的需求日益增加,远程控制机器人可以让人在安全的工作环境操控残酷环境中作业的机器人,对保障人身安全等方面有重要意义[3,4]。
工业机器人往往利用示教器、PLC等传统的方式操控[5,6],但传统的控制方式只适合近距离控制。
当前很多企业工业机器人方面的技术人员储备不足,远程控制工业机器人可以提高机器人的管理效率。
因此,学者们纷纷致力于工业机器人远程控制研究。
1995 年,澳大利亚的 Western 大学开发了一套六轴机器人控制系统,通过Web 远程控制带有摄像机的ABB 六轴工业机器人拾取积木[7]。
Sven等首次完全用 Java 开发ABB 机器人控制系统,且该系统可在经过认证的虚拟机上执行[8],但使用Java语言开发的系统无法满足工业控制应用程序对可靠性、稳定性与实时性的要求。
Morbidi等基于Eth.RSIXML通信协议开发KUKA 机器人的远程控制系统[9],但未解决系统与外围设备通信问题。
基于RobotStudio的机器人干涉区设定方法及工程应用

基于 RobotStudio 的机器人干涉区设定方法及工程应用摘要:本文所的研究重点是中国现阶段工业机器人的运营管理系统和软件控制技术发展,首先经过对瑞典ABB企业所研制的计算机编程软件系统RobotStudio 进行系统分析和深入研究,构建了基于具体应用环境的企业人工智能实时、离线干预区域管理的系统设计方案,最后再经过具体的项目实践数据分析,总结干预区域设计技术下的工业机器人的应用优势。
关键词:RobotStudio;机器人干涉区;设定方法;工程应用二十一世纪,已成为了机器人与人共处的全新时期,而机器人技术也正在日益的发展引起着人们的重视.在机器人应用中,除去其本体以外,还需要包括其他的机械操作设备,也就是人们通常所说的机器人移动操作装置.而假如把任何和机器人协作的人和机器,都置身于机器人作业轨迹空间中工作的话,往往就会存在着由于其干涉区域问题,所产生的高风险现象.与以往机械加工装置相比,机器人的作业空间中也就往往不能稳定工作.而这个问题既对使用人员造成了不安全危害,同时也提高了应用人工智能的困难度.而干涉区域功能问题,正是克服这种问题的一个手段.而对于怎样在人工智能使用中合理利用这个功能,就变成了人工智能厂商和其使用者双方共同关注的课题,也因此二者都需要对其干预区域的理论和特性,进行更为深入的研究,1RobotStudio概述本文在对工业机器人进行管理技术的研究和创新之时,采用了由瑞典语作业基础预算公司所开发的工业机器人程序设计软件系统RobotStudio,该软件主要运用了作业基础预算公司最先进的virtualrobotTM软件技术,可以进行在离线方式状态下的自动化机器人程序设计和模拟。
在国外市场,robotstudio软件因其离线编程能力和自主控制技术而受到广泛关注和赞赏。
在实际应用中,该软件还可以直接导入机器人框架中使用的各种三维模式,并通过自动路径捕获和自动生成完成仿真构建。
同时,操作员可以通过仿真界面直观地实现系统配置和机器人编程的使用,,从而达到了在线监控作业和离线编程等不同的作业特性。
机器人 三维视觉引导系统 通用技术要求-最新国标

机器人三维视觉引导系统通用技术要求1范围本文件规定了机器人三维视觉引导系统的组成、功能要求和性能要求。
本文件适用于指导企业、高校、科研院所等相关机构开展机器人三维视觉引导系统的研发与应用。
2规范性引用文件下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。
其中,注日期的引用文件,仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB11291.1-2011工业环境用机器人安全要求第1部分:机器人GB/T33863.8-2017OPC统一架构第8部分:数据访问GB/T39005-2020工业机器人视觉集成系统通用技术要求GB/T40659—2021智能制造机器视觉在线检测系统通用要求T/SAITA001—2021人工智能计算机视觉系统测评规范3术语和定义下列术语和定义适用于本文件。
3.1三维视觉引导系统3D vision-guided system利用三维视觉技术引导机器人实现实时任务的系统。
3.2机器人robot具有两个或两个以上可编程的轴,以及一定程度的自主能力,可在其环境内运动以执行预期任务的执行机构。
[来源:GB/T12643—2013,2.6,有修改]3.3机械臂robotic arm具有模仿人类手臂功能并可完成各种作业的自动控制设备,通常具有多关节连接,可在平面或三维空间进行运动。
3.4末端执行器end effector为使机器人完成其任务而专门设计并安装在机械接口处的装置。
[来源:GB/T12643—2013,3.11]3.5准确率accuracy对于给定的数据集,正确识别的样本数占全部样本数的比率。
3.6成功率success rate任务执行成功的次数占任务执行总次数的比率。
3.7真实度trueness测试结果的预期值与真实值之间的接近程度。
3.8精确度precision在规定条件下,独立测试结果之间的一致性。
其取决于随机误差的分布,与真实值或指定值无关。
EPSON机器人远程以太网说明
EPSON远程以太网远程以太网为EPSON标配的一项功能。
EPSON启用远程以太网,机器人只能做服务器(server),不能做客户端(client)。
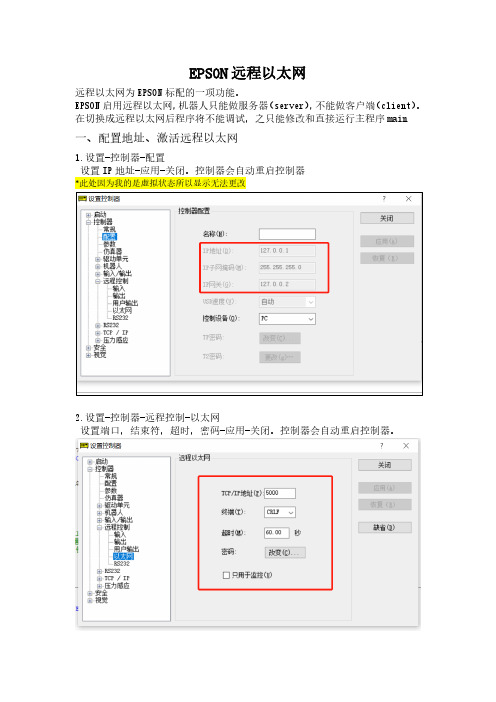
在切换成远程以太网后程序将不能调试,之只能修改和直接运行主程序main一、配置地址、激活远程以太网1.设置-控制器-配置设置IP地址-应用-关闭。
控制器会自动重启控制器*此处因为我的是虚拟状态所以显示无法更改2.设置-控制器-远程控制-以太网设置端口,结束符,超时,密码-应用-关闭。
控制器会自动重启控制器。
3.启动远程以太网设置-控制器-配置把控制设备切换成“远程以太网”-应用-关闭。
控制器会自动重启控制器。
二、以太网指令和格式* 所有命令必须以“回车”结束。
所有命令发送后机器人以:#命令,0回复为机器人执行命令成功例:发送$login,123456回复:#login,0 ,则表示登陆成功。
$Login 格式:$Login,密码 +回车 *返回:#login,0 已经登入成功。
$Logout 格式:$Logout +回车$Start,0 格式:$Start,Main程序编号 +回车$Start,1$Stop 格式:$Stop +回车$Pause 格式:$pause +回车$Continue 格式:$Continue +回车$GetStatus获取状态如下:#GetStatus,00100000001,000000100000001:Test/Teach/Auto/Warning/SError/Safeguard/EStop/Error/Paus ed/Running/Ready0000:错误/警告代码$Reset$SetMotorsOn,1$SetMotorsOff,1$SetCurRobot,1$GetCurRobot$Home,1$GetIO,10$SetIO,10,1$GetVariable,g_speed$SetVariable,g_speed,55$Execute,"Print Here"#Execute," X: 150.000 Y: 100.000 Z: -30.000 U: 90.000 V: 0.000 W: 0.000 /R /0"$Execute,"Motor On" 格式:$Execute,"执行的命令" 如:给机器人电机上电:$Execute,"Motor On"$Execute,"Go XY(150,100,-30,90)/R" *运行机器人$Execute,"Go Here+X(10)"$Execute,"go p1"$Execute,"p(10)=Curpos" $Execute,"SavePoints"robot1.pts"" $Execute,"Tool 1"以上只是部分指令,更多指令详见RC软件中的附带手册三、错误响应代码四、实际应用以一个通讯实例为例程序如下:程序运行会与调试助手互发数据1.激活远程以太网打开运行窗口-激活远程以太网激活完成“停止”可选到此远程以太网激活完成,可关闭RC软件2.输入指令,启动机器人程序机器人回复0,则启动成功另一边,程序已经运行并且已经和调试助手连接上,并可以相互收发数据这里举例启动程序,如果想通过远程指令直接移动机器人则不用发$Start,0,$Login完成后,可直接发$Execute,"Motor On"让机器人电机上电,上电后可直接按格式发移动指令。
达芬奇机器人结构

达芬奇机器人结构
达芬奇机器人(Da Vinci Robot)是由美国公司Intuitive Surgical开发的一种手术机器人系统。
它是一种远程操纵手术
系统,能够通过操作台上的控制器和视觉显示系统,由外科医生远程操纵机器人臂进行手术。
达芬奇机器人系统主要由以下几个部分组成:
1. 控制台:外科医生通过控制台上的操作器进行手术操作。
操作器与机器人臂相连,可以实时传递外科医生的手指运动到机器人臂。
2. 机器人臂:机器人臂一般有四个或者更多个关节,类似于人的手臂。
每个机器人臂上都有一台摄像机和工具插槽,用于传输图像和插入手术工具。
3. 视觉显示系统:机器人系统利用高清晰度摄像机捕捉手术图像,将其传送到外科医生的视觉显示系统上。
外科医生可以通过视觉显示系统实时观察手术场景。
4. 手术工具:机器人系统配备一系列手术工具,如钳子、刀具、缝合针等,用于进行手术操作。
达芬奇机器人系统的结构使外科医生能够进行精确的手术操作,并提供了更好的视觉效果和手术控制能力。
这种机器人系统主要用于微创手术,可用于多种手术领域,包括泌尿外科、消化系统外科、妇科、心脏外科等。
项目 RobotStudio的在线功能

“I/O”
2020/4/3
任务8-4 使用RobotStudio在线编辑I/O信号的操作
1.创建一个I/O单元DSQC651
4.在“DeviceNet device”上 单击右键,选择“新建
DeviceNetdevice……”。
2020/4/3
任务8-2 使用RobotStudio进行备份与恢复的操作
1.备份的操作
5.此处提示“备份完成”, 则操作成功。
2020/4/3
任务8-2 使用RobotStudio进行备份与恢复的操作
2.恢复的操作
1.将机器人状态钥匙开关切换 到“手动”状态。
2.在“控制器”中选择“请求 写权限”。
2020/4/3
任务8-1 使用RotbotStudio与机器人进行连接并获 得权限的操作
二、获取RobotStudio在线控制权限
3.在示教器上单击“同意” 进行确认后,待完成对控制 器的写操作以后,在示教器 中单击“撤回”,收回写权
限。
2020/4/3
任务8-2 使用RobotStudio进行备份与恢复的操作
2020/4/3
任务8-1 使用RotbotStudio与机器人进行连接并获 得权限的操作
一、建立RobotStudio与机器人的连接
通过RobotStudio与机器人的连 接,可用RobotStudio的在线功 能对机器人进行监控、设置、 编程与管理。将随机所附带的 网线一端连接到计算机的网络 端口,另一端与机器人的专用
2020/4/3
任务8-4 使用RobotStudio在线编辑I/O信号的操作
2.创建一个数字输入信号DI00
Java机器人控制使用Arduino和Java控制机器人
Java机器人控制使用Arduino和Java控制机器人Java机器人控制应用于物联网领域,是一种将Java编程语言与Arduino硬件平台相结合的技术。
借助Java编程语言及其丰富的库函数,我们可以轻松地实现对机器人的控制。
本文将介绍如何使用Arduino和Java控制机器人,并提供一些示例代码供参考。
1. 硬件准备在使用Java控制机器人之前,我们需要准备一些硬件设备,包括Arduino开发板、电机驱动模块、各类传感器等。
具体的硬件配置因机器人类型而异,读者可根据自己的需求进行选择。
2. 软件准备为了实现机器人的控制,我们需要安装Arduino软件和Java开发环境。
首先,我们需要下载并安装Arduino开发环境,该环境可以从Arduino官方网站免费获取。
其次,我们需要安装Java开发环境,这可以通过下载和安装Java Development Kit(JDK)来实现。
3. Arduino编程在开始Java机器人控制之前,我们需要编写Arduino程序,以便与硬件进行通信。
Arduino编程语言基于C/C++,因此对于熟悉这两种语言的开发人员来说,应该很容易上手。
在编写Arduino程序时,我们可以使用Arduino官方提供的开发环境,该环境支持Arduino特定的编程语言。
以下是一个简单的Arduino程序示例,用于控制机器人前进和后退:```cppint motorPin1 = 2; // 第一个电机的引脚int motorPin2 = 3; // 第二个电机的引脚void setup() {pinMode(motorPin1, OUTPUT);pinMode(motorPin2, OUTPUT);}void loop() {// 机器人前进digitalWrite(motorPin1, HIGH);digitalWrite(motorPin2, LOW);delay(2000);// 机器人后退digitalWrite(motorPin1, LOW);digitalWrite(motorPin2, HIGH);delay(2000);}```通过上述代码,我们可以实现机器人的前进和后退功能。
机器人虚拟仿真及远程控制系统的研究及实现
W块化设 计理念建立机器人虚拟仿真及远程控制系统,实现了机 器人虚拟运动仿真和远程作业控制。
2 系统设计方案
SCARA 机器人虚拟仿真及远程控制系统采用面向 对象的 C/S 模式,系统可分为三层:用户层、服务层、物 理层。系统的逻辑结构如图 1 所示,各层的功能如下:
238 2016,52(13)
Computer Engineering and Applications 计算机工程与应用
机器人虚拟仿真及远程控制系统的研究及实现
李连中,翟敬梅,何海洋
LI Lianzhong, ZHAI Jingmei, HE Haiyang
华南理工大学 机械与汽车工程学院,广州 510641 School of Mechanical and Automotive Engineering, South China University of Technology, Guangzhou 510641, China
(1)用户层即为远程客户机,下载客户端安装包,在 人机交互界面,可实现机器人虚拟运动仿真和远程监控。
(2)服 务 层 同 时 具 有 远 程 服 务 器 和 本 地 控 制 机 功
基金项目:广东省高等学校优质资源及仪器设备共享系统项目(No.K711001III)。 作 者 简 介 :李 连 中(1989—),男 ,硕 士 ,主 要 研 究 领 域 为 机 器 人 系 统 及 自 动 化 装 备 的 理 论 与 技 术 ,E-mail:lianzhong888999@163.
Abstract:Robots virtual simulation and combined with the remote control show the unique advantages and broad application prospect. This paper designs and implements a robot virtual simulation and remote control system using technology of OpenGL and WinSock. Firstly, the establishment of virtual simulation platform based on C# and OpenGL achieves the motion simulation of robot virtual reality. Secondly, interpreter based on the principle of reflection is proposed to achieve the panel or program remote control. Thirdly, the improved algorithm of collision-free trajectoriesplanning based on velocity vector field can avoid static and dynamic obstacles effectively and security. Finally, the system test results show its correctness and feasibility. Key words:robotics; virtual simulation; remote control; interpreter; velocity vector field
机器人系统设计-案例3---机器人的远程控制

3.3 设备连接关系
3.3.2 控制信号列表:外设IO分配表(1)
外设
PLC NetSCADA
IO类型,以PLC为主体
启动按钮
X000 X000
停止按钮
X001 X001
急停按钮
X002 X002
气泵是否过压
X003 X003
伺服电机1到位信号 X004 X004
伺服电机1报警信号 X005 X005
3.3 设备连接关系
3.3.2 控制信号列表:外设IO分配表(2)
外设
PLC NetSCADA IO类型,以PLC为主体
输入备用3 红色指示灯 绿色指示灯 黄色指示灯 #1机器人急停信号 #2机器人急停信号 #3机器人急停信号 流水线伺服电机2使能 流水线伺服电机2运行 流水线伺服电机1使能 流水线伺服电机1运行 相机1光源控制 相机2光源控制 相机3光源控制
加工原点、是否在运行中、是否暂停中。 ◆ 手动对#1机器人进行控制:远程上电、远程
下电、运行、暂停、继续、停止、回加工原 点、MODBUS TCP通讯进行重连。
3.1 功能要求
3.1.2 案例目标 ➢ 熟练掌握海得PLC、NetSCADA的使用 ➢ 熟练掌握通过OPC通讯协议实现PLC与
NetSCADA的通讯 ➢ 熟练掌握史陶比尔机器人的示教编程 ➢ 掌握史陶比尔机器人和海得PLC之间通过
X017 Y000 Y001 Y002
Y003
Y004 Y005 Y006 Y007 Y013 Y014 Y015
X017 Y000 Y001 Y002
Y003
Y004 Y005 Y006 Y007 Y013 Y014 Y015
I,高电平有效 O O O
工业机器人系统操作习题库+答案
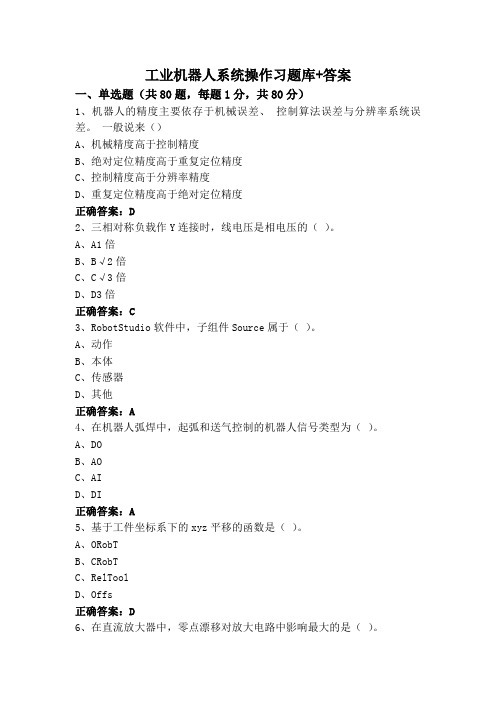
工业机器人系统操作习题库+答案一、单选题(共80题,每题1分,共80分)1、机器人的精度主要依存于机械误差、控制算法误差与分辨率系统误差。
一般说来()A、机械精度高于控制精度B、绝对定位精度高于重复定位精度C、控制精度高于分辨率精度D、重复定位精度高于绝对定位精度正确答案:D2、三相对称负载作Y连接时,线电压是相电压的()。
A、A1倍B、B√2倍C、C√3倍D、D3倍正确答案:C3、RobotStudio软件中,子组件Source属于()。
A、动作B、本体C、传感器D、其他正确答案:A4、在机器人弧焊中,起弧和送气控制的机器人信号类型为()。
A、DOB、AOC、AID、DI正确答案:A5、基于工件坐标系下的xyz平移的函数是()。
A、ORobTB、CRobTC、RelToolD、Offs正确答案:D6、在直流放大器中,零点漂移对放大电路中影响最大的是()。
A、A第一级B、B第二级C、C第三级D、D末级正确答案:A7、动力学的研究内容是将机器人的()联系起来。
A、A 运动与控制B、B 传感器与控制C、C 结构与运动D、D 传感系统与运动正确答案:A8、谐波传动的缺点是()。
A、传动侧隙小B、惯量低C、扭转刚度低D、精度高正确答案:C9、结构型传感器是依靠传感器()的变化实现信号变换的。
A、电阻值B、结构参数C、体积大小D、材料物理特性正确答案:B10、一个刚体在空间运动具有()自由度。
A、3 个B、5 个C、4 个D、6 个正确答案:D11、六自由度关节式工业机器人因其高速、高重复定位精度等特点,在焊接、搬运、码垛等领域实现了广泛的应用,在设计机器人上下料工作站时,除负载、臂展等指标外,应着重关注的指标是( )。
A、绝对定位精度B、轨迹精度和重复性C、关节最大速度D、重复定位精度正确答案:C12、维修人员进入设备维修需要将启动控制锁住并挂标志锁(LOTO锁),目的是:()A、防止其他人员进入B、防止其他操作人员误开机器伤到维修人员C、便于领导检查D、工作签到正确答案:B13、在Smart组件建立I/O连接中,不属于“添加I/O Connection”设定的有()。
KUKA机器人编程手册[9]
![KUKA机器人编程手册[9]](https://img.taocdn.com/s3/m/84705825b6360b4c2e3f5727a5e9856a56122691.png)
KUKA机器人编程手册KUKA编程手册一、概述二、结构机械臂:机械臂是的主体部份,由多个关节和连杆组成,可以在空间中进行多自由度的运动。
机械臂的末端可以安装不同的工具或者末端执行器,以适应不同的应用场景。
控制柜:控制柜是的控制中心,包含了电源模块、驱动模块、通信模块、安全模块等,负责为机械臂提供电力和信号,并与外部设备进行数据交换。
操作面板:操作面板是的人机交互界面,由触摸屏和按键组成,可以显示的状态信息、参数设置、故障诊断等,并提供手动操作和编程的功能。
软件系统:软件系统是的核心部份,包含了操作系统、应用软件、编程语言等,决定了的功能和性能。
KUKA使用了专门开辟的KUKA.Co ntrolStudio作为操作系统,支持多种应用软件和编程语言。
三、编程语言MC-Basic:MC-Basic是一种基于文本的编程语言,类似于C语言,可以实现对运动和逻辑控制的精确描述。
MC-Basic支持变量、数据类型、运算符、函数、流程控制等基本语法元素,并提供了一系列专门针对控制的指令和函数。
KRL:KRL是一种基于文本的编程语言,类似于Pascal语言,可以实现对运动和逻辑控制的简洁描述。
KRL支持变量、数据类型、运算符、函数、流程控制等基本语法元素,并提供了一系列专门针对控制的指令和函数。
PC-API:PC-API是一种基于对象的编程接口,可以通过C或者C++等高级语言,在PC端对进行远程控制。
PC-API提供了一系列封装了功能的类和方法,并支持事件驱动和异步通信等特性。
四、操作系统系统管理:系统管理是操作系统的基础功能,负责的启动、关闭、重启、更新、配置、备份、恢复等操作,并提供了一系列的系统工具和设置选项。
程序管理:程序管理是操作系统的核心功能,负责的编程、编辑、调试、运行、住手、暂停、恢复等操作,并提供了一系列的程序工具和设置选项。
设备管理:设备管理是操作系统的扩展功能,负责与外部设备的连接、通信、控制等操作,并提供了一系列的设备工具和设置选项。
LabVIEW的移动机器人论文:基于LabVIEW的移动机器人远程网络监控系统
LabVIEW的移动机器人论文:基于LabVIEW的移动机器人远程网络监控系统Remote Network Monitoring System of Mobile-robotBased on LabVIEW摘要:介绍了一种基于LabVIEW的移动机器人远程网络监控系统。
该系统利用LabVIEW中网络和串口通信的相关函数,实现了计算机和控制对象间的数据传送,并且通过计算机网络达到了远程监控的目的。
同时该系统使用了远程无线通讯模块,从而实现了对移动机器人的实时信息采集和无线控制。
另外,该系统将监控对象实时运行的数据记录到一定的文件中,以便进行历史查询或者相关数据的分析。
AbstractThis paper introduces one kind remote network monitoring system for mobile-robot based on LabVIEW.Using the net-work functions and the serial port communications-related functions in LabVIEW,which has realized data transfer betweenthe computer and the controlled object,also has achieved the remote monitoring goal through the computer network.The re-mote wireless communication module has been used simultaneously,thereby gaining real-time information acquisition fromthe mobile-robot.In addition,the real-time data of the object can be written incertain record document for historical queriesor data analysis.关键词:LabVIEW,串口,无线通信,网络,移动机器人Keywords:LabVIEW,serialport,wirelesscommunication,network ,mobile-robot当今机器人技术已经得到了长足的发展,并且出现各种类型的机器人,如移动机器人等,但一些移动机器人仍然是靠简单的无线控制器进行控制的,且控制距离较小。
abd robot controller rc9使用手册
abd robot controller rc9使用手册ABd Robot Controller RC9 使用手册简介ABd Robot Controller RC9是一款高性能的机器人控制器,可实现多种机器人应用的控制和管理。
本手册将指导您如何正确地使用和配置ABd Robot Controller RC9,以及了解其功能和特点。
功能和特点•强大的性能: ABd Robot Controller RC9采用先进的处理器和算法,具备出色的计算和控制能力。
•多种通信接口: 支持多种通信接口,包括USB、以太网、串口等,便于与其他设备进行连接和通信。
•全面的控制功能: ABd Robot Controller RC9提供丰富的控制功能,包括运动控制、传感器数据采集、通信和协调等。
•灵活的软件支持: ABd Robot Controller RC9提供易于使用的软件开发平台和工具,支持自定义开发和应用程序集成。
硬件配置•主控板: 包含处理器、存储器和通信接口等核心组件的主控板。
•电源模块: 用于为ABd Robot Controller RC9提供稳定的电源供应。
•扩展模块: 可选的扩展模块,用于增加其他功能和接口。
连接与设置1.将ABd Robot Controller RC9与电源模块连接,并接通电源。
2.使用适配器将ABd Robot Controller RC9与电脑连接,选择合适的通信接口。
3.打开电脑上的控制软件,并根据软件提示进行相关设置。
基本使用1.启动ABd Robot Controller RC9,并等待其初始化完成。
2.使用软件界面或编程接口发送指令,控制机器人的运动和功能。
3.监控机器人的状态和传感器数据,及时调整控制参数和策略。
高级功能ABd Robot Controller RC9还提供了许多高级功能,例如: - 自动路径规划和导航 - 视觉处理和识别 - 网络通信和远程控制 - 多机器人协同工作常见问题•Q: ABd Robot Controller RC9无法正常启动如何解决? A: 请检查电源连接是否正确,或尝试重新启动设备。