不同动态叶片倾角下动静态分离器的试验研究
风电叶片静态与动态特性分析

风电叶片静态与动态特性分析第一章:引言随着环保意识的逐渐提高和全球能源危机的愈发严峻,新能源在如今的能源领域中愈发重要。
其中,风能作为其中最重要的一项,被越来越多地人们所关注和重视。
在风能领域中,风电机叶片作为其中的关键部件之一,其性能的好坏直接影响着整个风电机的发电效率。
因此,对风电叶片的静态和动态特性进行分析是非常必要的。
第二章:风电叶片静态特性分析2.1 风电叶片的分类和结构目前,常见的风电叶片结构主要有三种:直板叶片,曲线翼型叶片和倾斜叶片。
而在其内部,则通常包含了叶片框架、根部、中心轴以及加强筋等部件。
其中,曲线翼型叶片是目前使用最广泛的。
2.2 风力作用分析风电叶片在不同的风速下,受到的力和力矩都是不同的。
风速越高,所受到的力和力矩也就越大。
同时,风方向的不同也会影响到叶片所受到的力和力矩的方向。
2.3 风电叶片的静载特性在叶片受到一定的静载时,会产生一定的挠度和应力。
因此,需要通过一系列的静载试验,来确定叶片的最大载荷、最大挠度等参数,从而保证叶片的安全性和稳定性。
第三章:风电叶片动态特性分析3.1 风电叶片振动形式风电叶片在使用过程中,会产生多种不同的振动形式。
其中,主要包括自然频率振动、谐振振动和失稳振动等。
3.2 风电叶片振动原因分析风电叶片振动的主要原因是叶片自身的结构特性和外部风力的作用。
外部风力可以分为横向风力和纵向风力。
横向风力主要影响叶片弯曲振动,而纵向风力主要影响叶片扭曲振动。
3.3 风电叶片的动载特性在叶片受到一定的动载时,会产生一定的振幅和频率。
因此,需要通过一系列的动载试验,来确定叶片的自然频率、谐波响应等参数,从而保证叶片的稳定性和可靠性。
第四章:风电叶片静态和动态特性测试方法4.1 风电叶片静态测试风电叶片的静态测试主要包括材料测试、叶片静载试验、叶片形变测试等。
4.2 风电叶片动态测试风电叶片的动态测试主要包括自然频率测试、振动响应测试、谐波分析测试等。
水力机械叶轮叶片流动控制技术的研究与应用

水力机械叶轮叶片流动控制技术的研究与应用1. 研究背景水力机械是利用水能转换为机械能的装置,其中叶轮是其核心部件之一。
叶轮叶片的流动控制对于提高机械的性能与效率具有重要意义。
因此,研究和应用水力机械叶轮叶片流动控制技术,对于提高水力机械的工作性能、减少损失以及保证安全稳定运行具有重要意义。
2. 研究内容(1)流动特性分析:通过数值模拟或实验方法,对水力机械叶轮叶片的流动特性进行分析,包括叶片表面静压分布、流动损失、流动速度等参数的获取和分析,为后续的流动控制提供基础数据。
(2)流动控制机理研究:分析叶轮叶片流动过程中的失稳现象和非线性问题,探究其产生的机理,并基于此研究出相应的流动控制方法。
(3)流动控制概念与原理:根据叶轮叶片流动特性和机理研究的基础上,提出一些新颖的流动控制概念与原理,为实际应用提供理论支持。
(4)流动控制技术开发:结合上述研究成果,开发相应的流动控制技术,包括设计新型的叶轮叶片结构、优化叶片表面形态、改良进口与出口等控制措施,提高水力机械的性能与效率。
3. 应用案例(1)提高水电站发电效率:通过研究叶轮叶片的流动控制技术,改善水电站的发电效率和性能。
优化叶轮叶片的流动特性,减小流动损失,提高水轮机的工作效率。
(2)减少水力机械损失:通过改进叶轮叶片的结构和表面形态,减小叶片表面阻力,降低损失,提高水力机械的安全性和可靠性。
(3)提升泵站的工作效率:通过研究叶轮叶片流动控制技术,优化泵站的叶轮设计,提高泵站的抽水效率和水力机械的工作性能。
(4)提高流量调节的精度:通过优化叶轮叶片的流动控制技术,改善水力机械的流量调节性能,提高流量的精确控制能力。
4. 研究意义与前景(1)提高水力机械的性能:通过研究和应用水力机械叶轮叶片流动控制技术,能够提高水力机械的发电效率、减少损失、提升工作性能,使其更加高效稳定地运行。
(2)节能减排:水力机械是清洁能源的重要装置,通过优化叶轮叶片流动控制,减少能源损耗,达到节能减排的目的。
风电机组叶片静态检验方法概述

风电机组叶片静态检验方法概述Post By:2008-12-17 11:04:55此主题相关图片如下:1.jpg图1:多负载点,翼面向的叶片静态检验静态检验的目的是测定叶片的结构特性,其中包括硬度数据和张力分布.丹麦Spark?r叶片检验中心负责的DANAK委任的静态检验包括以下标准部分:测定物理特性、翼面向检验、翼弦向检验与叶片目视检验。
收到叶片后,一个典型的叶片检验包括:叶片长度、质量、自重力矩和重力中心的测定。
160个变形测量器被放置在叶片的外壳和内部结构上,与生产商的检验计划一致。
叶片被固定到检验设备上,并且一个根部弯曲力矩被安装到叶片上。
在叶片静态检验中,共有7个负载夹子固定到叶片上。
在所有位点同时加上负载。
静态检验的最大叶根弯曲容量是20.000 kNm。
检验中的弯曲力矩分布状态与叶片设计人员计算的设计力矩分布状态相比较。
与剪切力相比,多点负载程序比单点负载程序更现实。
负载由远程控制电动提升机或液压系统产生,用力量传感器测量负载强度。
距离传感器沿着叶片测量不同位点的偏差,尤其是负载传入点的偏差。
变形测量器扫描仪对变形测量器信号进行加工。
所有测量值被储存进数据采集系统。
翼弦向与翼面向检验通常分两个方向进行,分别为上风向与下风向。
从检验获得的最基本数据是在叶片表面测量的张力值。
非线性图表往往暗示叶片外壳的结构弯曲正在形成,虽然这种现象在早期阶段很难发现。
坡形张力图查证叶片结构设计的最基本的信息。
张力分布的纵向图揭示了可能可以降低叶片疲劳寿命的高应力梯度变化曲线。
此主题相关图片如下:2.jpg图2张力与局部弯曲力矩的函数关系图此主题相关图片如下:3.jpg图3最大负载时的张力分布。
半开式离心叶轮与扩压器间流动模态提取与分析
半开式离心叶轮与扩压器间流动模态提取与分析邵昱昌;王彤【摘要】考虑到半开式离心叶轮叶顶间隙流动对离心压缩机流动稳定性的影响,本文采用动态模式分解的方法对比了离心叶轮和无叶扩压器分别在设计工况和近失速工况下的流动结构及其频率信息.结果表明:叶轮出口附近的叶顶间隙流动对无叶扩压器中流动有显著影响,无叶扩压器中出现了和叶顶泄漏流流动相关的涡结构.随着流量的减小,叶顶间隙流动进一步影响无叶扩压器内部流动,涡结构频率变高,径向直径减小并向动静交界面移动,同时靠近盘侧的流场出现不稳定流动趋势.【期刊名称】《风机技术》【年(卷),期】2017(059)004【总页数】7页(P1-7)【关键词】离心式压缩机;叶顶间隙;无叶扩压器;动态模式分解【作者】邵昱昌;王彤【作者单位】上海交通大学机械与动力工程学院;上海交通大学机械与动力工程学院【正文语种】中文【中图分类】TH452;TK05与闭式叶轮相比,半开式叶轮极限圆周速度大,单级压比高的优点而受到广泛的青睐。
随着机械装置向轻量化、高负荷发展,其应用范围正在不断拓展。
对于半开式离心叶轮,虽然可以降低应力提高转速,而叶顶间隙的存在,不可避免地产生叶顶泄漏流动。
叶顶泄漏流和叶片通道的二次流相互作用,进一步和主流相互掺混,导致了叶轮和扩压器中复杂的流场结构。
Senoo和Ishida[1-2]在上世纪八十年代研究了叶顶间隙对压缩机效率和压升损失的影响,结果表明叶顶间隙大小是影响间隙损失的重要因素之一。
2008年Schleer和Abhari[3]指出叶轮出口的流动结构和叶顶间隙处的流体流动密切相关。
国内刘长胜[4]、吴海燕[5]等人研究了叶顶间隙对离心式压缩机气动性能的影响。
2007年楚武利[6]采用数值模拟方法研究了不同的叶顶间隙对流场的影响,结果表明泄漏流动和通道涡的相互作用严重影响了通道中的流场分布。
2012年刘正先[7]通过对半开式离心叶轮几种不同间隙结构下流动参数进行分析,指出叶顶间隙流主要对流道后半段的主流产生影响,叶片吸力面形成涡流聚集区,造成能量损失。
压缩机叶片动静态特性研究方法的进展

l b an d t r vd h o ei a e ee c ot e o t m e in o t eb a e .Co ae i e oh rt o ag r ms u y o ti e o p o i et e r t lr fr n e t p i c h mu d sg h ld s f mp r d w t t t e l o t h h w i h ,n - me ia ac a o iu l e r ,b o d rn e o p l ain a d f x bl y r lc u t n i o v s a z d f m c l l i sf i o r a a g fa p i t n e i i t . c o l i
劣会 直接影 响压缩机 的整体性 能。根据 近年来 国内外研 究叶 片动静 态特性 的状 况 , 结合理论 与事 实, 理论 将
分析 、 实验研究和数值计算三类方法进行 了对比分析 , 出数值计 算方法是研 究叶片动静 态特 性的一种 有效 得
途径, 可以方便获得叶片的静力和动力特性参数, 为优化设计叶片结构提供理论数值参考。相对理论分析和
Ke r s:n me c a c lt n;b a e y a c a d sa c c aa trs c y wo d u r a c ua o il l i ld ;d n mi n t t h rce t s i i i
1 引 言
透平 机 械 广 泛 应 用 在 机 械 制 造 业 、 油 化 学 工 石
现象 的本质 规律 , 导 产 品 的设 计 , 指 同时 也 是 实 验研 究 和数 值计 算分 析 的基 础 。 从 理论上 来说 , 工作 状 态下 的叶 片主要 受两 种作 用力 : 由于透平高速旋转时 , ① 叶片 自身质量产生 的
磨煤机动静态分离器的应用研究

磨煤机动静态分离器的应用研究2 北方重工集团有限公司辽宁沈阳110000摘要:火力发电机组是通过锅炉燃烧煤粉产生蒸汽推动汽轮机发电的,煤粉的质量对于锅炉的燃烧效率、效果以及环保情况影响非常大。
煤粉是将原煤块通过磨煤机的碾磨制成粉状颗粒,评价其质量的指标是煤粉筛余值R90。
影响煤粉品质除了有磨煤机本身的碾磨效率外,粗细粉的分离也是重中之重。
本文介绍了磨煤机煤粉分离设备-动静态分离器的可行性。
关键字:磨煤机;动静态分离器;节能;环保;经济效益一、引言磨煤机是燃煤电力企业最重要的辅机之一,同时它也是电力企业耗电最大的辅机之一。
磨煤机出口煤粉细度和均匀度直接关系到锅炉的安全经济运行,而煤粉细度的大小和煤粉的分离器的特性有关。
早期磨煤机一般配有挡板式离心分离器,这种分离器调整煤粉细度效果较差而且一般不能在运行中调整,因此不能很好的适应煤种的变化和负荷的变化。
现代社会对环保要求的越来越高和对经济性的追求越来越强烈,促使更多的电厂采用动静态分离器。
通过实验表明磨煤机采用动静态分离器既可以提高煤粉细度和均匀度,降低飞灰含碳量,提高燃烧效率,煤粉分配性更均匀,改善输粉管的煤粉分配,适宜于低NOx燃烧器的燃烧,降低NOx的排放,有利于环保。
又可以在线调整煤粉细度,增加对煤种的适应性,提高分离效率,减小循环倍率,降低机组标准煤耗,节省制粉电耗,节约生产成本。
由于动静态分离器的经济效益高、投资成本低、维护简单、环保性能突出,所以得到了广泛的应用。
二、动静态分离器调整特性静态分离器不能有效的将细煤粉从粗煤粉中分离出来,会导致细煤粉在磨内再次循环,增加细煤粉的循环次数,降低研磨效率和磨机能力。
动静态分离器利用空气动力学和离心力将细煤粉从粗煤粒中分离出来,依靠转子转动使带粉气流旋转,因此分离的主要作用是粒子的离心力分离,而叶片的撞击作用相对小得多。
煤粉粒子在旋转分离区内水平方向主要携带气流的曳引力和离心力作用,当粒子受到的离心力大于气流的曳引力时,粒子就会分离出来。
动叶与周向倾斜静叶的级间非定常流动及气动声学研究
动叶与周向倾斜静叶的级间非定常流动及气动声学研究随着商用航空发动机推力的不断增加,大涵道比涡扇发动机的风扇噪声在飞机起飞/降落过程中也越来越大,如何降低风扇噪声是商用客机取得适航认证必须考虑的问题。
动静干涉噪声是风扇噪声的主要组成部分,降低风扇噪声通常采用技术手段有匹配动静叶片数、铺设管道声衬、采用弯掠动叶和增加动静间隙等。
在满足前两种方法的基础上,改变动静叶片的几何结构和相对位置成为当前主要的降噪方法。
增加动静叶片排间隙能够有效的降低动静干涉噪声,但会导致发动机短舱尺寸的增加进而降低发动机的推重比。
本文在不增加动静间隙的基础上,通过后置静叶的周向倾斜,调节动静级间非定常脉动力的径向相位适配来降低动静干涉噪声。
本文以1.5级轴流压气机为对象,针对后置静叶周向倾斜对动静叶片干涉引起的非定常流动和气动噪声进行了系统地研究。
通过实验测量、数值模拟以及噪声预测等手段,获得了静叶倾角对压气机内部流场特性以及气动声学特性的影响,讨论了静叶倾斜的降噪机理,重点关注了静叶倾角对动叶尾迹的调相作用,发展了基于管道声学模态的动静干涉噪声预测方法。
本文主要内容包括:1.设计搭建了1.5级轴流压气机气动-声学性能试验台,测量了-25°、0°、25°静叶周向倾角对压气机气动性能的影响,获得了压气机装置在这三种代表性静叶倾角时的空气动力学特性曲线。
采用动态压力传感器以及旋转机匣的方式,对管道声学模态进行了测量,捕获了一阶谐波下静动干涉的模态。
2.针对1.5级和单级压气机模型,采用数值计算的方法对具有不同静叶倾角的压气机内部流动开展了非定常研究,并通过性能曲线和动态压力传感器的测量结果验证了数值计算的准确性。
通过对非定常数值计算结果分析,揭示了动叶尾迹在静叶通道内的发展过程以及对静叶表面附面层流动的影响,深入分析了静叶倾角对动静级间动叶尾迹径向相位分布的影响,同时对静叶表面的扰动系数以及静叶受到的非定常力及其相位进行了深入探讨,认识了静叶倾角对压气机动静干涉表面声源的影响。
高原型风力发电风轮叶片的静态与动态刚度分析

高原型风力发电风轮叶片的静态与动态刚度分析风力发电作为可再生能源领域的重要组成部分,近年来得到了广泛的关注和应用。
在高原地区,由于海拔的增加以及气压的降低,风速相对较大,这使得高原地区成为理想的风力发电场所。
然而,由于高原地区的特殊气候和地貌条件,高原型风力发电机组面临着一些独特的挑战。
其中一个关键问题是风轮叶片的静态与动态刚度。
静态刚度是指风轮叶片在受到外部力作用时的抵抗变形的能力。
对于高原地区的风力发电机组来说,静态刚度的分析至关重要。
首先,由于海拔的增加,高原地区的气压较低,风轮叶片面临的气压载荷较大。
其次,高原地区常年风力较强,风轮叶片需要具备足够的刚度来抵抗风压力。
因此,风轮叶片的静态刚度需要在设计阶段进行准确分析。
动态刚度则指风力发电机组在运行过程中受到扭转和振动等动态力反馈时的抵抗变形的能力。
动态刚度的分析与静态刚度类似,同样在高原地区的风力发电机组设计中具有重要作用。
高原地区的风力较强,而气压较低,这使得风轮叶片在运行过程中容易受到扭转和振动的影响。
因此,风轮叶片的动态刚度需要进行准确的分析,以保证风力发电机组的正常运行和安全性。
为了分析高原型风力发电风轮叶片的静态和动态刚度,首先需要对风轮叶片的结构进行建模。
一般来说,风轮叶片由复合材料制成,具有轻量化和高刚度的特点。
在建模过程中,可以采用有限元方法,将叶片划分为小的单元,并对每个单元的刚性进行描述。
通过数值计算,可以得到风轮叶片的整体刚度和变形情况。
静态刚度分析的关键是确定风轮叶片在受到外部力作用时的应力分布和变形情况。
这可以通过将外部力应用于风轮叶片模型上,并对其进行有限元求解来实现。
在进行分析时,需要考虑到高原地区的气压载荷以及风力载荷。
通过对模型进行合理的加载和边界条件设置,可以得到风轮叶片在静态情况下的应力和变形情况。
根据分析结果,可以进一步优化风轮叶片的结构设计,以提高其静态刚度。
动态刚度分析则需要考虑风轮叶片在运行过程中的振动和扭转。
波纹叶片控制扩压叶栅流动分离的DES数值模拟

第38卷,总第219期2020年1月,第1期《节能技术》ENERGY CONSERVATION TECHNOLOGYVol.38,Sum.No.219Jan.2020,No.1 波纹叶片控制扩压叶栅流动分离的DES数值模拟苏丽蓉1,羌晓青1,2(1.上海交通大学航空航天学院,上海 200240;2.燃气轮机与民用航空发动机教育部工程研究中心,上海 200240)摘 要:为了研究新型被动流动控制技术-波纹叶片对扩压叶栅流动分离的控制效果并探索其流动机理,本文采用分离涡算法(DES)对0°和8°攻角下的原型和波纹叶片进行数值模拟。
研究结果表明:在0°攻角下,波纹叶片对扩压叶栅性能产生的影响非常微弱,总体性能与原型叶栅基本相当,非定常流动具有较好的周期性;在8°攻角下,波纹叶片能明显降低叶栅总压损失、减小流动分离。
详细的流场细节分析表明,叶片表面的波纹能诱导产生一对反向旋转的流向涡,有效加强叶栅前缘的局部流动,为附面层的低能流体注入动量,从而提高了附面层抗分离能力,延缓了分离的产生。
关键词:扩压叶栅;波纹叶片;流动分离;流动损失;DES数值模拟中图分类号:TH133;TP183 文献标识码:A 文章编号:1002-6339(2020)01-0016-05 DES Investigation on Compressor Cascade Flow Control Using Undulating BladeSU Li-rong1,QIANG Xiao-qing1,2(1.School of Aeronautics and Astronautics,Shanghai Jiao Tong University,Shanghai200240,China;2.Engineering Research Center of Gas Turbine and Civil Aero Engine,Ministry of Education200240,China)Abstract:To investigate the flow control effect and mechanism of a new type of passive flow control tech⁃nique,undulating blade,DES(Detached-Eddy Simulation)simulations on baseline and undulating blade were performed at0°and8°incidence angles.The results show that at0°incidence angle,the un⁃dulating cascade performance is almost identical to that of the baseline,and the flow field maintains visi⁃ble periodicity.While at8°incidence angle,undulating cascade suppresses the flow separation,accom⁃panied by the reduction of total pressure loss coefficient.Detailed flow visualization further indicates that pairs of rotating streamwise vortices are induced by undulation configurations to enhance the local flow near leading-edge and reenergize the low-momentum boundary layer,which contributes to the ability to resist and delay flow separation.Key words:compressor cascade;undulating blade;flow separation;flow loss;DES simulation收稿日期 2019-09-13 修订稿日期 2019-11-16基金项目:国家自然科学基金项目(No.51406115);国家科技重大专项(2017-II-0007-0021)作者简介:苏丽蓉(1994~),女,硕士研究生,研究方向为叶轮机械气动热力学。
TRT阻尼叶片动静态特性分析

Analysis for the static and dynamic characteristics ofdamping TRT bladeQin Shanfeng Li DexinSchool of Machinery and Precision Instrument Engineering, Xi’an University of Technology, Xi’an Shaanxi 710048, ChinaAbstract—The TRT device is affected by force of steady-state flow and non-steady-state interaction, that working-station is bad. A damper which is made of metal rubber is designed to improve stabilization of blade of the TRT, and to reduce vibration of the TRT. The damping blade of TRT is analyzed by static, modal and transient in ANSYS. The results are contrasted. The result indicates damper can reduce inherent frequent of the blade, and dynamic-stress. The structure of damper is simple, and easy to be made.Keywords—blade; damping; finite element; Stress; displacementTRT 阻尼叶片动静态特性分析秦山峰 李德信西安理工大学机械与精密仪器工程学院,西安,陕西,中国摘要 高炉煤气余压透平中的叶片在工作中受到稳态气流力和非稳态气流力的共同作用,工作环境恶劣。
风力机叶片翼型动态试验技术研究

风力机叶片翼型动态试验技术研究李国强;张卫国;陈立;聂博文;张鹏;岳廷瑞【摘要】风力机叶片动态振荡过程往往伴随着俯仰和横摆同时进行,以前对许多动态问题不清楚的阶段,工程上不惜以增加叶片重量为代价而采用偏安全的设计,通常忽略横摆振荡的影响;大型风力机设计对获取翼型更加全面、准确的动态载荷提出了更高要求,研究横摆振荡对翼型动态气动特性的影响规律具有重要意义.本文首次开展翼型横摆振荡动态风洞试验研究,采用"电子凸轮"技术代替机械凸轮实现了振荡频率和振荡角度的无级变化,基于设计的电子外触发装置实现了对动态流场的实时测量,实现了风洞来流、模型角位移和动态压力数据的同步采集,分别开展了翼型静态测压、俯仰/横摆动态测压、粒子图像测速和荧光丝线等试验研究,试验结果准度较高、规律合理;分析了动态试验洞壁干扰影响机制.研究表明,横摆振荡翼型的气动曲线也存在明显迟滞效应;随着振荡频率升高,翼型俯仰和横摆振荡下的气动迟滞性均增强;翼型俯仰振荡正行程的动态失速涡破裂有所延迟;洞壁与模型端部交界处的强三维效应对翼型压力分布影响较大;建立的横摆振荡试验技术可为风力机动态掠效应的研究提供技术支撑.【期刊名称】《力学学报》【年(卷),期】2018(050)004【总页数】15页(P751-765)【关键词】风力机;翼型;横摆振荡;测压;风洞试验【作者】李国强;张卫国;陈立;聂博文;张鹏;岳廷瑞【作者单位】中国空气动力研究与发展中心空气动力学国家重点实验室,四川绵阳621000;中国空气动力研究与发展中心低速空气动力学研究所,四川绵阳621000;中国空气动力研究与发展中心低速空气动力学研究所,四川绵阳621000;中国空气动力研究与发展中心空气动力学国家重点实验室,四川绵阳621000;中国空气动力研究与发展中心低速空气动力学研究所,四川绵阳621000;中国空气动力研究与发展中心低速空气动力学研究所,四川绵阳621000;中国空气动力研究与发展中心低速空气动力学研究所,四川绵阳621000【正文语种】中文【中图分类】O355引言风电行业近年来主力机型从兆瓦发展到多兆瓦级,超大型化叶片的重量随着叶轮直径增大而成立方关系地急剧上升[1].大型风力机的实际运动过程很复杂,叶片或翼型常常工作在动态失速状态下,动态失速是一个严重的非线性、非定常气动现象[2].目前还缺乏对非定常失速气动特性的深刻理解,无法全面准确描述动态失速现象和规律[3].动态振荡过程往往伴随着俯仰(迎角α周期性变化)和横摆(后掠角β周期性变化)同时进行[4],如图1所示,俯仰振荡会造成风力机实际极限载荷高于设计和计算值,而横摆运动多数时候可能会减小极限载荷.以前对许多动态问题不清楚的阶段,工程上不惜以增加叶片结构重量为代价而采用偏安全的设计,所以通常忽略横摆振荡的影响,国内外关于翼型动态特性的研究主要集中在俯仰振荡方面.为了提高叶片性能、降低叶片重量,气动载荷评估应该更加精确,以减少设计裕度.图1 翼型振荡形式示意图Fig.1 Schematic of airfoil oscillation types翼型动态试验最早是从直升机旋翼开始的,美国NASA、德国荷兰DNW、法国ONERA和俄罗斯TsAGI等机构在风洞中纷纷建立了旋翼翼型俯仰振荡动态试验装置和技术.后来,各国研究机构针对风力机也开展了类似的研究试验.在国外,水平轴风力机叶片俯仰振荡动态特性试验研究始于20世纪80年代末期,在此之前,对水平轴风力机的性能和载荷分析中并不包含动态失速和非稳态空气动力影响,Hansen等[5]通过测量一个直径为10 m的水平轴风力机的压力分布,对动态失速的存在进行了量化研究.针对二维翼型动态失速的研究相对要早一些,文献[6-10]采用多种手段对俯仰振荡翼型动态失速特性进行大量的风洞试验研究:当迎角大于静态失速迎角时,动态失速涡的存在对翼型上表面速度和压力分布存在重大影响;随着折算频率、平衡迎角及振荡幅值的增大,翼型动态失速效应增强.针对风力机专用翼型动态气动特性开展相对较多研究的是俄亥俄州立大学(OSU)[11],20世纪90年代,其在AARL 3×5亚音速风洞中开展了粗糙度和俯仰振荡运动参数影响研究,但是受到测量设备和手段的限制,得到的动态数据并不完整.为此,国际能源署(IEA)呼吁世界各地研究机构开展翼型动态试验研究,以获取“更精准、更全面”的气动数据[3],这将对大直径风力机的设计以及建造兆瓦级风力发电机组具有重要意义.国内方面,南京航空航天大学[12-13]、西北工业大学[14-15]、中航工业直升机所[16]建立和发展了翼型的动态试验设备和技术,拓展了翼型动态试验测力[12]、测压[15]和粒子图像测速[17]等多种手段,由俯仰振荡单自由度向俯仰沉浮两自由度振荡[18]发展,由定常来流向非定常来流[19-20]发展.然而,由于我国在翼型动态风洞试验技术研究上起步晚,技术水平明显低于欧美等国家,差距集中表现为:测试试验技术不能满足数据高精准度要求,动态结果受到装置运动、洞壁干扰、同步采集等多个环节影响,国内对以上这些方面开展的研究较少.目前,有少量关于旋翼翼型带固定后掠角下的俯仰振荡[21-22]或翼型径向流动[23-26]的研究,可认为是关于后掠角不变的静态“掠效应(sweep effect)”的研究:后掠翼型的三维非定常边界层分离相比二维流动情况下的分离呈现出明显不同的特点[27-29].然而,风力机摆振过程是伴随着后掠角不断变化和水平振动[30]的动态“掠效应”,摆振和其他非定常运动耦合会导致失速更加复杂[4].本文首次开展的翼型横摆振荡试验就是要模拟风力机叶片摆振过程中后掠角周期性变化的物理现象,即三维的动态“掠效应”,迄今为止,公开文献中尚无直接开展翼型横摆振荡的技术和研究,为了获得风力机更加全面、准确的载荷值,获得多目标优化的设计方案,需要研究横摆振荡对翼型动态载荷特性的影响规律.风洞试验是认识翼型动态失速特性和流动机理的主要手段,鉴于此,本文建立了翼型俯仰振荡和横摆振荡动态风洞试验手段,开展了风力机翼型动态失速特性试验研究.基于设计的电子外触发装置拓展了流态同步测量手段,并实现了风洞来流、模型角位移和动态压力数据的实时同步采集,可为风力机翼型动态“掠效应”的研究提供重要技术支撑,将会对提升我国大型风力机自主设计研发能力发挥至关重要的支撑作用.1 试验设备与模型1.1 风洞试验在中国空气动力研究与发展中心FL-11风洞中完成,该风洞是一座低速回流式风洞,其试验段入口尺寸为1.8 m(宽)×1.4 m(高),出口尺寸为1.84 m(宽)×1.4m(高),长度为5.8 m,模型中心距试验段入口下游2.6 m.风速低于70 m/s时湍流度达到0.000 8,轴向静压梯度优于规范指标0.005,试验稳定风速范围10~105 m/s.1.2 驱动装置驱动装置由工控机、运动控制柜、电机、减速机、电机支座和传动轴组件构成.工控机运行人机界面软件,实现系统参数设置、控制指令输入和运行状态监视等功能,通过以太网与伺服运动控制器通讯,运动控制器是该控制系统的核心,实现系统组态、位置闭环控制、凸轮轨迹规划等功能,如图2(a)所示.控制系统采用位置伺服控制技术,主要由全数字运动控制器(位控板)、全数字交流伺服系统、驱动模块和角位移传感器等组成,如图2(b)所示;在位控板的控制下,驱动模块使伺服电机按给定的变速运动规律转动.驱动装置的核心就是用“电子凸轮”取代机械凸轮,不但简化了机械装置结构,还实现了振荡频率和振荡角度的无级变化.图2 驱动装置控制Fig.2 Control of driving device1.3 试验模型本文以翼型试验模型来近似模拟风力机叶片的一个片段,进而研究正弦振荡对翼型气动特性的影响规律.如图3所示,模型为S809翼型,其弦长为300 mm,展长为1 400 mm,展弦比为4.67,俯仰振荡传动轴位于1/4弦长处,横摆振荡传动轴位于1/2展长处.模型为由中间段和两端翼尖组成的三段式结构.模型俯仰振荡时,采用图3(a)中的等直翼尖结构;横摆振荡时,端部采用整流翼尖结构,如图3(b)所示.模型试验阻塞度范围为3.5%(0°迎角)至8.3%(30°迎角).采用玻璃钢蒙皮和铝合金骨架结构,中间加铺PMI泡沫芯材,模型重量为35 kg,惯量为0.2 kg·m2.模型中间剖面为动态压力测量剖面,共布置27个内径1.6 mm的测压孔;距离中间剖面300 mm的截面共布置51个内径0.6 mm的静压测压孔.动态压力将传输到模型内部布置的差压式动态压力传感器,模型内铺设参考压软管和108根电缆,并从模型一端引出,51根静压管路则从另一端引出.模型表面测压点处开孔通过预埋测压铜管实现.压力传感器的参考压由共用的参考压软管输入,压力信号传输电缆采用AF200—0.25,预先铺设在模型内部,单个传感器与引入电缆焊接4个接头.模型开设可拆卸式盖板,方便连接传感器和测压管.图3 S809翼型模型Fig.3 S809 airfoil model1.4 测试设备1.4.1 角位移传感器安装于试验模型端的电位计式角位移传感器的输出信号与交流伺服电机端的光电编码器输出信号同时作用于运动控制器,构成位置反馈双闭环伺服控制系统,实现振荡运动规律的精确控制;角位移传感器输出的绝对值模拟信号与动态压力传感器信号一起接入动态数据采集系统,实现角位移信号与对应动态压力信号的同步采集.角位移传感器采用CONTELEC GL300型电位计,性能指标如图4所示.图4 电位计外形及性能Fig.4 The shape and performance of potentiometer 1.4.2 动态压力传感器测压元件采用ENDVECO 8510B系列差压式动态压力传感器,单个传感器连接四根电缆,并引入参考压及测量端压力两根测压软管.传感器的尺寸及外形如图5所示,其中括号内数字的单位为毫米.1.4.3 速压采集系统参考速压用T4-800型风速管测得,风速管的静压管和总压管接入压力采集系统进行实时采集.风速管安装在靠翼型下翼面一侧试验段上游位置,既保证对翼型周围流场的干扰较小,又能实时准确测量出来流的速压,在风洞中安装如图6所示.图5 动态压力传感器(8510B型)尺寸及外形Fig.5 Size and shape of dynamic pressure sensor(8510B type)图6 实时速压测量风速管Fig.6 Pitot-static tube for measuring wind speed 1.4.4 流态测量系统试验采用LaVision公司的TR-PIV(timeresolved particle image velocimetry)系统,采用单CCD相机的二维PIV测量方案.TR-PIV系统主要由HS5.1高速相机系统、LDY304 Nd:YLF激光器系统、控制器、高性能计算机及采集处理软件组成,如图7(a)所示.试验用DEHS(癸二酸二辛脂)示踪粒子采用加热型的DF-1500粒子播放器播撒.相机布置在翼型下方并与传动轴固连随动,如图7(b)所示,可拍摄翼型吸力面上方300 mm×300 mm区域的激光照射截面.通过设计的外触发装置,在预定的触发角度启动粒子图像测速系统进行流场拍摄,得到所需迎角下的流场图像,从而有利于试验结果的分析比较.本试验所用PIV系统的相机采用外触发方式触发,外触发信号为TTL电频格式的方波信号,在上升沿5 V触发,触发后PIV系统可按照内部时钟采集.试验设计的电子外触发装置,如图7(c)所示,将电位计采集信号传给触发装置进行标定,当翼型振荡到达设定好的采集角后,由触发装置触发相机进行采集记录.外触发系统由电位计传感器、电压信号采集卡、实时控制器和数字信号输出卡等组成.其中,电位计传感器直接安装于翼型转轴,减少了中间传动环节,提高了翼型角度测量精度;实时控制器具有实时操作系统,不仅可进行物理逻辑编程,还可进行时序逻辑开发.利用电位计传感器信号,可判断翼型振荡运动方向,实时解算获得角度值,分辨率高达0.01º,从而保证触发信号具有较小的位移偏差;利用实时控制器,可实现微秒量级的逻辑运算和输入/输出控制,从而保证触发信号具有较小的时间偏移.表1 相机和激光器技术指标Table 1 Technical index of the camera and laserIndex Value resolution 1024×1024 full frame frequency 3.6 kHz maximum frame 13.5 kHz at 512×512 frequency minimum frame interval<1 μs dynamic range 12 bit laser wavelength 527 nm laser energy 2×100 mJ laser frequency 650 Hz图7 翼型俯仰振荡试验PIV系统及外触发装置Fig.7 PIV system and external triggering device for airfoil pitching oscillation test图7 翼型俯仰振荡试验PIV系统及外触发装置(续)Fig.7 PIV system and external triggering device for airfoil pitching oscillation test(continued)采用夜光鱼线制作技术和外触发荧光摄影技术,建立了低速风洞荧光丝线流动显示方法,如图8所示.发明的荧光丝线包括纸带、胶带和若干荧光丝线;荧光丝线采用直径为0.1 mm的特制纤维线,荧光丝线之间的间隔为25 mm,荧光丝线的长度为25 mm,试验时将纸带揭开贴在模型表面即可,提高了丝线粘贴质量.采用主波长为395 nm、功率为60 W的紫外线光源以和来流方向成60°的入射角照射,诱导荧光丝线发光,然后用相机对处于试验状态中的丝线进行拍摄.利用荧光视觉反差得到较好的流谱显示效果,丝线的流动跟随性好,丝线的运动(转动、抖动或倒转)可以清晰判别气流方向、分离区位置和空间涡位置转向等.采用上文所述电子外触发方式触发相机实时地捕捉复杂的动态流动现象.图8 翼型横摆振荡荧光丝线流动测量方法Fig.8 Fluorescent-wire method for measuring the flow of yaw oscillating airfoil1.4.5 PXI数采系统PXI总线数据采集系统由前置放大器、数据采集器、通讯卡、控制计算机和数据处理计算机等部分组成,并配套编写相应的数据采集和处理程序.2 试验技术与方法静态压力测量方面,静压管连接至PSI DTC Initium电子扫描压力测量系统进行采集,作为动态压力试验研究的静态参考基准.当雷诺数(以翼型弦长为参考长度)为6.2×105时,迎角为−10°~20°范围内间隔2°采集翼型静态压力(静态失速迎角8°附近为间隔1°).动态压力测量方面,主要开展翼型俯仰振荡和横摆振荡两部分试验,翼型俯仰振荡迎角变化规律试验在不同的平衡迎角α0、振荡幅度α1、振荡频率 f和试验风速V下开展.翼型横摆振荡横摆角变化规律试验在不同的初始横摆角β0、振荡幅度β1、振荡频率 f、试验风速V和平衡迎角α0下开展.具体试验方法如下:由安装在洞顶上的电机提供驱动力,采用“电子凸轮”技术代替机械凸轮,实现模型的俯仰振荡和横摆振荡.驱动电机、减速机及传动轴组件安装在洞体上方的电机支座上,俯仰振荡时,模型“顶天立地”安放在风洞正中央,电机连接减速机输出扭矩,由俯仰振荡传动轴组件通过法兰盘与翼型连接,驱动模型做正弦振荡,传动轴穿过翼型的下端,并通过一对7010AC型角接触球轴承和下支撑座连接,保证整个驱动中轴的同心度和定位精度.该装置同时兼顾了研究横摆振荡动态“掠效应”问题,采用“模型对称中截面为动态测压剖面,支杆连接模型两端”的构型,其设计依据是:(1)支杆放置两端、测压孔居中可以最大程度地减小支杆和模型端部三维效应对动态压力测量的气动干扰;(2)模型横摆运动时,正中的测压截面在旋转方向的线速度分量最小甚至可以忽略,便于只针对横摆角周期性正弦变化,即“掠效应”问题直接开展研究.横摆振荡运动具体实现方法是:驱动装置的位置和连接方式不变,模型被水平横跨在风洞中央,通过横摆振荡传动轴组件连接模型“U”形支杆来驱动翼型做正弦振荡;横摆振荡在不同的固定迎角(α0= −4°~20°,间隔3°)下开展,迎角的变化通过更换支杆和模型之间的角度块来实现.俯仰振荡和横摆振荡模型安装方式如图9所示.从模型中引出的动态压力测量电缆和静压管跟随模型一起随体运动,并且保证翼型上下两端的密封性.PIV试验时,相机随转轴一起作俯仰振荡,以保证始终在一个视角观察拍摄翼型周围流场.为保证翼型模型风洞试验的流动二元性,俯仰振荡时,在模型上下端分别连接端板,端板跟随翼型一起转动;横摆振荡时模型采用整流翼尖替换等直翼尖以降低端部三维效应.动态压力信号采集传输方法是,从模型内部通过一侧端板引出线缆及参考压软管,软管置于洞外稳流球中以提供参考大气压,传感器信号线缆通过J30J-37型转接头与8根双绞双屏蔽软电缆8-2×0.15快速连接,实现传感器的供电和信号的传输,采用两台Tectronix PWS4305 DC电源串联实现±5 V供电.翼型俯仰振荡时,开展动态流场特性PIV试验研究;翼型横摆振荡时,荧光丝线顺来流沿翼展方向粘贴于翼型上翼面,开展动态流场特性荧光丝线试验研究. 图9 装置驱动模型作正弦振荡示意图Fig.9 Schematic diagram for the sinusoidal oscillation of model driven by the driving device采用PXI总线数据采集系统保证多通道同步采集能力,同步采集参数主要包括风洞来流总/静压、模型实时角位移、模型压力数据等,如图10所示.将翼型角位移作为一个参数实时采集,确保与27个压力数据采集同步.试验时压力采样采用电位计任意位置信号触发,不同模型振荡频率,每周期采样数量皆为256个点,采样周期固定为16个.对采集后的压力传感器数据进行六阶傅立叶滤波和低通滤波处理,再平均成1个周期数据,将1周期数据进行六阶最小二乘多项式拟合,按等相位角间隔输出固定数量角位移(256个点)和对应的压力数据.图10 翼型动态测压试验同步测量采集示意图Fig.10 Scheme of synchronous measurement and acquisition for airfoil dynamic pressure test3 数据处理与分析3.1 数据处理方法模型气动系数按照风轴系给出.风轴系定义为:原点为翼型模型对称剖面弦线1/4位置,x轴指向来流为正,y轴逆来流方向垂直向左为正,z轴按照右手法则确定.数据处理按照以下步骤进行:第一步:数据采集.针对27个动态压力传感器,同步采集各自16个周期原始电压数据,再按每个传感器标定系数计算到压力差值,输出初读数和吹风数压力值(存储文件名为:初读数*.ini,吹风数*.tst).第二步:周期平均.扣除初读数,将16周期数据平均成1个周期数据,形成每个传感器的单周期压力数据(存储文件名:*_PA.txt).第三步:系数计算.按式(3)计算成压力系数(存储文件名:*_CP.txt);此步完成后,可从“*_CP.txt”文件中将27个传感器相同当地角位移的压力数据取出,绘制当地角位移的压力分布曲线.第四步:压力积分.按下文数据处理公式进行压力积分,获取升力系数和俯仰力矩系数(存储文件名:*_CP_rst.txt).压力系数按如下公式计算其中,CPi为测压点压力系数,Pi为测压点静压,P∞为来流静压,P0为来流总压,q∞为来流动压.以上完成后进行压力积分,计算法向力系数、轴向力系数.作用在翼型上的法向力系数CN和轴向力系数CA通过积分翼型表面压力分布获得,通过内插值获得整个函数区间的函数值后,根据函数值进行数值积分,其积分公式如下式中,Cpu和Cpl分别为翼型上、下表面压力系数;Cpbe、Cpaf分别为翼型最大厚度之前和最大厚度之后的压力系数;=x/c为x坐标相对于弦长c无量纲量;=y/c为y坐标相对于弦长c的无量纲量;umax,lmax分别为翼型上、下表面最大纵坐标相对于弦长c的无量纲量.根据升力系数定义,可以求出翼型升力系数CL翼型绕1/4弦点的俯仰力矩系数Cm用下式计算获得最终得到的试验结果主要是CL−α,Cm−α,CL−β,Cm−β的迟滞回线,并可根据升力系数迟滞回线的面积判断升力损失和翼型动态失速气动特性.数据处理程序具备复算功能,能根据原始数据复算出各个α和β下的Cpl−,Cpu−,Cpbe−,Cpaf−曲线,并具备手工剔除坏点功能,经确认的压力分布数据进行积分处理得出该α或β下的CL和Cm,并进一步得到该试验点的CL和Cm迟滞曲线.3.2 数据分析3.2.1 数据考核验证雷诺数为6.2×105时,FL-11风洞试验结果与OSU(俄亥俄州立大学)[11]、CSU(科罗拉多州立大学)[31]的风洞数据分别进行对比验证.比较动态压力传感器测得的翼型表面压力分布(图11)和升力系数曲线(图12)可知,FL-11风洞试验结果和这两家机构的结果吻合良好,且FL-11风洞动态压力孔测量获得的CL−α数据与静态压力孔测量获取的结果一致性良好.总体评价,动态压力测量系统可靠性较好,测量结果具有较高的试验准度.图11 迎角16.1°下,翼型表面压力分布与OSU风洞数据对比Fig.11 Comparison of surface pressure distribution of airfoil with OSU wind tunnel data at 16.1°AOA图12 动态压力传感器测得翼型CL−α曲线Fig.12 CL−α curve of airfoil measured by dynamic pressure sensors图13给出了Re=6.2×105(风洞速压为540 Pa)下,俯仰振荡α =5◦ ± 10◦sinπt和静态翼型的升力系数比较曲线.在正行程(迎角增大的方向,即>0)−5◦~6◦小迎角范围,翼型的迟滞回线存在升力线性段,并与静态试验升力线接近,动态失速迎角相对于静态失速迎角8°推迟约6°.迎角继续增大,升力下降,翼型一个振荡周期内升力系数随迎角的变化形成明显的迟滞回线.这主要是因为,翼型在一个振荡周期内,经历了涡的形成、发展、破裂和恢复过程,迟滞现象主要是由负行程(迎角减小的方向,即<0)时翼型分离涡重建的延迟引起的.图13 Re=6.2×105下动态结果和静态结果对比Fig.13 Comparison of dynamic and static results with Re=6.2×105在满足折算频率和雷诺数相似前提下,对翼型俯仰振荡α0=8◦, α1=10◦,f=1.38 Hz,V=37.3 m/s条件下FL-11风洞的试验结果进行了考核验证,结果如图14所示.由于模型尺度和风洞指标的差别,不同风洞动态试验结果之间存在一定差异.FL-11试验的失速迎角在OSU的失速迎角之前,但在西工大的NF-3风洞试验的失速迎角之后,在5◦~15◦范围内,FL-11试验和NF-3试验的升力系数均比OSU的数据偏小,整体看FL-11试验数据和NF-3数据更接近,在负行程和OSU的数据更接近.文献[32]认为动态试验的随机误差和洞壁干扰等因素使得不同风洞得到的动态试验结果很难接近.图14 Re和k相似下不同风洞动态试验结果对比Fig.14 Comparison of dynamic test results of different wind tunnels under the similarity of Re and k3.2.2 俯仰振荡频率影响图15为α =10◦± 10◦sin2πft,Re=6.2× 105时不同振荡频率下翼型的升力、俯仰力矩系数对比曲线.当翼型振荡至临界迎角8°附近,迟滞回路区域仍在增大,在这种情形下,可以观察到失速的延迟以及最大升力系数的提高.随着振荡频率升高(振荡频率0.5~3 Hz,对应折算频率k值0.016~0.094),CL,Cm迟滞回线区域增大,动态失速迎角、最大升力系数、最大俯仰力矩系数也有增大的趋势,显示出流动的非定常效应随频率升高而增强.而对于负行程中某一迎角而言,则k值越大,升力系数越小.图15 不同折算频率下翼型动态气动特性曲线Fig.15 Dynamic aerodynamic characteristics of airfoil under different conversion frequencies3.2.3 横摆振荡频率影响图16 α0=14◦,β1=20◦,不同振荡频率下翼型升力和俯仰力矩系数曲线Fig.16α0=14◦, β1=20◦,lift and pitching moment Coefficient under different oscillating frequencies在Re=6.2×105时,模型采用整流翼尖端部,图16表明,随着翼型振荡频率的升高,横摆振荡翼型的升力系数、俯仰力矩系数的迟滞环面积也在增大,CL迟滞环面积:0.826 5→1.610 5→2.174 4,Cm迟滞环面积:0.069 4→0.268 4→0.399 1,显示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
下阻力损失随着动态叶片倾角的变化可以看到, 阻 力损失的变化规律不尽相同, 就是因为引起阻力损 失的因素在不同条件下的变化各不相同造成的, 总 的来说, !")叶片倾角下的阻力损失相对较低。由于 这里的阻力除了分离器本体产生的外还包括有弯头 和管段变异等造成的其它损失, 所以阻力值比较大。
!结论%来自不同动态叶片倾角下的阻力特性
热 能 动 力 工 程 ・ &77 ・ -’’, 年 ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! 为了使试验更接近于工业实际应用, 直接使用 煤粉进行试验, 用法国生产的 !"#$% &’() 型激光粒 度分析仪对煤粉粒度进行测量, 给粉粒度分布如图 * 所示。用皮托管和 + 型差压计对分离器进出口压 力进行测量, 在测量处采用等截面积加权平均法, 截 [,] 面上取 四 个 测 量 点 。 试 验 中 系 统 风 量 保 持 在 )1’ 和 & -(* .* / 0,动 态 转 子 转 速 分 别 为 *(’、 动 态 叶 片 倾 角 ! 分 别 取 为 ’5、 1)’ 2 / .34 三 个 值, &15、 *’5和 )15 四个角度。 煤粉颗粒在分离区中被分离的原理有两方面: 一方面煤粉颗粒与旋转叶片发生碰撞, 从而飞逸出 分离区; 另一方面, 分离区中的颗粒受到气流曳引产 生的向心力和叶片产生的离心力的作用, 当离心力 大于向心力时, 颗粒飞逸出分离区, 在涡流中旋力作 用下, 将粗颗粒从气粉流中分离出去。因此, 分离器 结构确定后, 即当动态叶片倾角一定时, 转速是影响 煤粉细度的主要因素, 可以通过调节转速来控制离 [7 8 9] 。 心力的大小, 从而控制分离器出口煤粉细度 而当动态叶片倾角增加时, 会使煤粉气流需要绕流 过转子叶片才能穿过转子, 将会造成煤粉颗粒与旋 转叶片发生碰撞的频率增加, 使得更多颗粒被分离 了出去; 同时, 在颗粒绕流叶片的时候会使自身受到 的离心作用增强, 因此这两个因素使得叶片倾角增 加时分离器出口煤粉细度 !)1 的值降低。试验中煤 粉细度 !)1 最低可达到 * 6 91: 。 - 6 - 分离效率的变化 采用综合分离效率 " 来评判分离器的分离性 能, 它是细粉分离效率减去粗粉分离效率的值。其 图* 给粉粒度分布 中, 细粉分离效率指分离器出口煤粉中小于 !)1 煤 粉量与分离器的入口煤粉中小于 !)1 煤粉量的百分 比, 粗粉分离效率分离器出口煤粉中大于 !)1 煤粉 量与分离器入口煤粉中大于 !)1 煤粉量的百分比, 但它们只是分别表达了分离器对细粉和粗粉的分离 状况, 所以用综合分离效率才能准确地反映分离器 的性能。图 1 给出了不同转速时综合分离效率随动 态叶片倾角的变化。
中图分类号: 34!!) - !
引
言
再燃低 56 " 燃烧技术又称为燃料分级或炉内
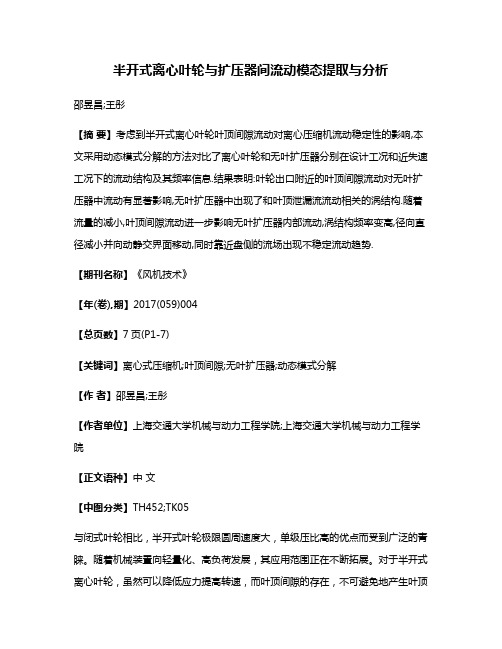
给粉装置前进风管道上的笛型管用于测量系统风 量。物料从料仓中通过螺旋给粉机供给, 在拉法尔 喷嘴处与气流混合, 被气流携带送往动静态煤粉分 离器。两相气流从动静态煤粉分离器下部进入, 到 达分离区域后, 首先经过沿周向均匀布置的 )" 片静 态叶片 (叶片倾角为 ,+/) , 然后再经过沿周向均匀布 (叶片倾角为 !) , 最后由分离器 置的 #" 片动态叶片 顶部离开。叶片布置可如图 ! 所示。分离出来的粗 物料落到分离器内筒后通过粗粉排出口排出。经过 分离的两相气流通过风机进入布袋除尘器, 物料被 布袋除尘器捕集, 由布袋除尘器下部的排料口排出, 空气则直接排向大气。
图)
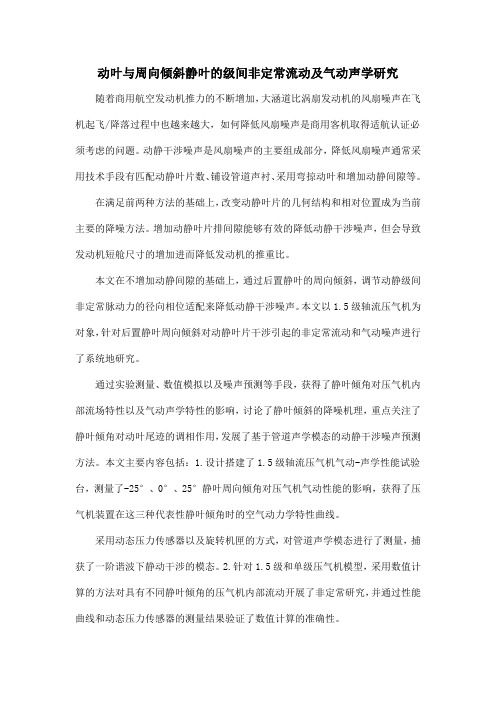
煤粉细度随叶片倾角的变化
第.期 杨龙滨, 等: 不同动态叶片倾角下动静态分离器的试验研究 ・ ’4N ・ ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! 引起粗、 粉分离效率的变化。当动态叶片倾角和转 子转速增加时, 对于粗颗粒的分离, 有利的方面是颗 粒受到的离心力增强同时叶片击打到颗粒的频率增 加, 其中击打频率的提高对分离粗颗粒起了很大的 作用; 不利的方面是气流穿过转子的流通通道变窄, 气流径向速度增加, 同时叶片倾角和转速的增加会 使得分离区的湍流程度加强, 颗粒受到涡流裹挟而 不能被分离出来的概率增加。对于小于 !" ! # 的颗 粒, 对气流的跟随性很好, 虽然叶片倾角和转子转速 增加可以增强它的分离, 但不如对粗颗粒的影响明 显。因此可知, 相同转速下, 动态叶片倾角增大加强 了对大颗粒的分离作用, 尤其是在低转速的时候效 果更加明显; 在大叶片倾角时, 综合分离效率随着转 速增加而降低主要是对大颗粒的分离效果变差引起 的。 通过对动静态转子分离器在不同动态叶片倾角 和不同转子转速下的试验研究, 得到以下几点结论: (’)!")叶片倾角下分离器出口煤粉细度最低, 综合分离效率较高, 阻力损失较低, 综合比较来看, 对于需要煤粉较细的情况下是最好的动态叶片倾角 角度。 随着动态叶片 (.)在相同分离器转子转速下, 倾角增加, 分离器出口煤粉变细; 综合分离效率增 随后有所下降; 阻力损失 加, 在 %()叶片倾角时最大, 则是在不同的转速下变化有所不同, 大叶片倾角下 的阻力损失较低。 转子转速增加可 (%)当动态叶片倾角固定时, 以使分离器出口煤粉变细, 使较小叶片倾角下的分 离器综合分离效率提高, 但在大叶片倾角时却使综 合分离效率降低。阻力损失随着转子转速增加存在 着一个最低值。 参考文献: 图$ 两相阻力损失随叶片倾角的变化
图1
综合分离效率随叶片倾角的变化
从图 1 的试验结果可以看出, 各转速下综合分 离效率都是在动态叶片倾角为 *’5时最大, 可以达到 而大叶片倾角 (*’5 和 )15) 时综合效率随着 (( 6,: ; 转速增加而降低, 。综合分离效率的变化是因为粗 粉和细粉在不同条件下有着不同的分离表现, 从而
还原技术, 它是降低 56 " 排放的诸多炉内方法中最 有效的措施之一, 在国外的很多电站锅炉上已经取 得成功的应用。在煤粉再燃过程中, 煤颗粒粒径越 细小, 其升温速率就越高, 热分解发生也越早, 释放 出的挥发份也越多。在相同条件下, 较细的煤粉能
[’] 够释放出更多的挥发份, 有较高的 56 还原效率 。
因此, 将煤粉超细化后, 其反应活性好, 燃尽效果优 于常规煤粉, 所以超细化煤粉再燃低 56 " 技术符合
[! 7 ,] 。同时, 有实验结果 我国以煤为主的能源结构
图’
试验系统简图
表明, 再燃燃料量占主燃料的 !"0 左右时可以获得 [+] 良好的再燃效果 。 为了获得足够的合格超细化煤粉, 制备煤粉的 磨煤机所配用的粗粉分离器是关键部件之一。采用 动静态煤粉分离器作为粗粉分离器, 出口煤粉细度
文章编号: (!""%) ’""’ $ !"#" "! $ "’(% $ ")
不同动态叶片倾角下动静态分离器的试验研究
杨龙滨’ , 吴少华’ , 邱朋华’ , 高振森!
(’. 哈尔滨工业大学 燃烧工程研究所,黑龙江 哈尔滨 ’+"""’; !. 黑龙江科技学院 洁净煤技术研究中心,黑龙江 哈尔滨 ’+""!%)
为了满足测量的要求, 压力测点均设置在分离
[%] 56117 8 9, [ 2] :;88 5 <, => :/ 01 ! ?@-A*@B AC*@DEC *FGD*-,-E / (") : H*@E*FII ,- J-F*EK L-M <@#GDIA,@- 5?,F-?F, ’NN4, .! %4" 3 !(4 / [!] 郑巧生 / 天然气再燃 3 一种低成本的 01 ! 控制技术 [ 2] / 锅炉 技术, (N) : ’NN" .% 3 .&, .N / ["] 李 [$] 肖 戈, 师 东 波, 池 作 和, 等 / 煤 粉 再 燃 还 原 01 的 实 验 研 究 杰, 董正岗, 石江陵, 等 / 静动叶结合型旋转式粗粉分离器 [ 2] (’) : / 电站系统工程, .((!,.( !! 3 !$ / 在南京热电厂的应用 [ 2] (’) : / 中国电力, .((., %" &! 3 &$ / [&] 岑可法 / 锅护燃烧试验研究方法及测量技术 [ 6] 水利电 / 北京: 力出版杜, ’N4& / [4] 孔文俊, 栾庆富, 张晓梅, 等 / 6H5 磨静动叶片结合组合式旋转 分离器性能的评价 [ 2] (!) : / 电站系统工程, ’NN", ’’ "$ 3 "N, .$ / [N] 孔文俊, 程尚模, 栾庆富 / 组合式旋转分离器的试验研究 [ 2] /动 力工程, ($) : ’NN$, ’$ "( 3 "! / [’(] 娄新生, 张明春, 孔文俊, 等 / 6H5 磨煤机旋转分离器两相阻力 特性的试验研究 [ 2] (%) : / 热能动力工程, ’NN$, ’’ ’!% 3 ’!$ /
第 !! 卷第 ! 期 热 能 动 力 工 程 EFG - !!, 5F - ! 869:5*; 6< =5>?5==:?5> <6: 3@=:A*; =5=:>B *5C 16D=: !""% 年 ) 月 A2H - ,!""% ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! !