2012年跟车模型
【国家自然科学基金】_车辆跟驰模型_基金支持热词逐年推荐_【万方软件创新助手】_20140801

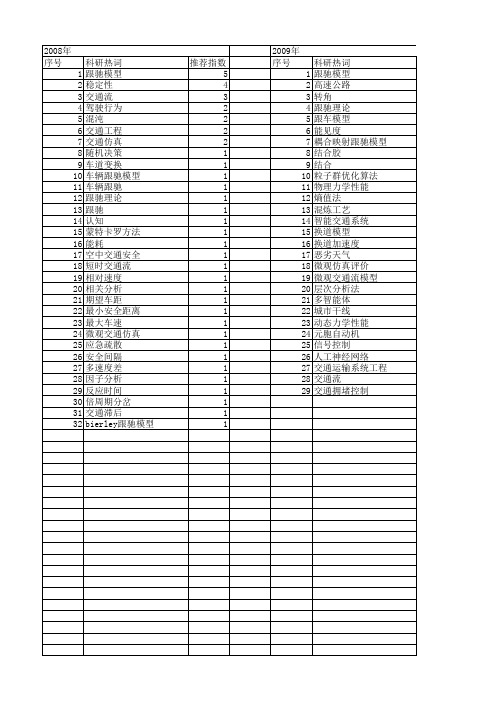
2012年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42
科研热词 车辆跟驰 交通工程 跟驰模型 驾驶倾向性辨识 需求安全距离 防追尾 车载装置 车型 跟驰约束 跟驰理论 跟驰特性 跟驰 虚拟车间距 绿波 综述 统计物理 稳定性 离散化 瓶颈隧道 汽车辅助驾驶 模拟验证 最优间距 智能运输系统 数学建模 数值计算 改进vdr模型 微观仿真 建模思想 反应时间 参数标定 加速度干扰 分子动力学 交通运输系统工程 交通状态 交通流理论 交通安全 交通仿真 个体差异 ngsim mkdv方程 kdv方程 burgers方程
2014年 科研热词 交通工程 模型 饱和度 需求安全距离 速度 车辆跟驰行为 车头间距 路外停车 跟驰特性 跟驰模型 视频数据分析 智能体系统 智能交通 改进优化速度模型 排队长度 微观交通仿真 影响 城市交通 城市交叉路口 启停次数 十字路口 动态长度 加速度 分子动力学 交通运输系统工程 交通流理论 交叉口群 matlab fvd改进模型 推荐指数 3 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2011年 科研热词 车辆跟驰 跟驰模型 驾驶行为 仿真 交通流 驾驶行为模型 驾驶员行为 车道变换 车辆换道模型 车辆换道 车辆主动安全 车头时距 跟驰 自由流状态 综述 灰关联度 港区 期望速度 最小安全距离 最优控制 感知变量 快速路交织区 应急疏散 安全评价 加速度 分布模型 侧向偏移 人工势能场 交通运输工程 交通工程 交通冲突 交通仿真 交叉口 二维元胞自动机 bp神经网络 推荐指数 4 4 2 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
【国家自然科学基金】_跟驰_基金支持热词逐年推荐_【万方软件创新助手】_20140803
推荐指数 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2010年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39
53 54 55 56 57
2011年 科研热词 跟驰模型 车辆跟驰 交通流 驾驶行为 仿真 交通运输工程 高速跟驰 驾驶行为模型 驾驶员行为 韦伯定律 防滑路面 车道变换 车辆换道模型 车辆换道 车辆主动安全 车头时距 跟驰距离 跟驰 起动波 自由流状态 耦合映射跟驰模型 综述 灰关联度 港区 流量-密度基本图 波速 模型验证 期望速度 最小安全距离 最小可觉差 最优控制 智能交通 数据统计 感知变量 快速路交织区 应急疏散 密度倒置 安全车距设计 安全评价 城市快速路 反馈控制 参数标定 加速度 分布模型 侧向偏移 优化速度函数 人工势能场 交通心理学 交通工程 交通实测 交通冲突 交通仿真 推荐指数 5 4 4 2 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
推荐指数 5 5 4 4 3 2 2 2 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2011年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52
早期车辆跟驰模型研究综述

车辆跟驰模型研究综述学号:14S032034 姓名:孟柳1、早期车辆跟驰模型1.1 Pipes与Forbes的跟驰模型Pipes的车辆跟驰模型源于加利福尼亚机动车法规中对驾驶员跟驰行驶的建议:在跟随行驶过程中,安全距离至少为一个车身长度,并随速度每增加16km/h,就增加一个车长。
Pipes与Forbes的跟驰模型是早期的研究成果,其工作具有开创的意义,虽然随着对这一领域的深入研究,其模型精度已不能令人满意。
但其形式简单,物理意义明确,在实际当中仍然得到了广泛应用。
1.2 刺激--反应模型刺激--反应模型重在描述驾驶环境中各种刺激对驾驶员行为的影响,包括GM模型和线性跟车模型。
GM模型最早是1958年由美国通用汽车研究小组的Chandler,Herman和Montroll提出的,它是由驾驶动力学模型(Driving Dynamic Model)推导而来,并引入如下理念:Response=f(sensitivit,stimuli)式中,Response为后车在时刻t+T的加速度或减速度;sensitivity为后车对刺激的敏感度;stimuli为在时刻t后车与前车的相对速度;T是后车驾驶员的反应时间。
这个模型的基本假设为:驾驶员的加速度与两车之间的速度差成正比;与两车的车头间距成反比;同时与自身的速度也存在直接的关系。
GM模型清楚地反映出车辆跟驰行驶的制约性、延迟性及传递性。
GM跟驰模型的优缺点:GM跟驰模型形式简单,物理意义明确。
作为早期的研究成果,具有开创意义,许多后期的跟驰模型研究都是以其建立的刺激--反应的方程为基础,在前车紧急刹车时,后车维持不致发生尾撞的最小安全距离为前提推导而得。
但是,GM模型的通用性较差,现在较少使用GM模型,这是因为在确定m和l的过程中存在大量的矛盾之处。
造成矛盾的原因可能是:(1)车辆跟驰行为非常易于随着交通条件和交通运行状态的变化而变化,前车的刺激与后车的反应并非是一一对应的关系。
基于车辆个体特征的IDM模型
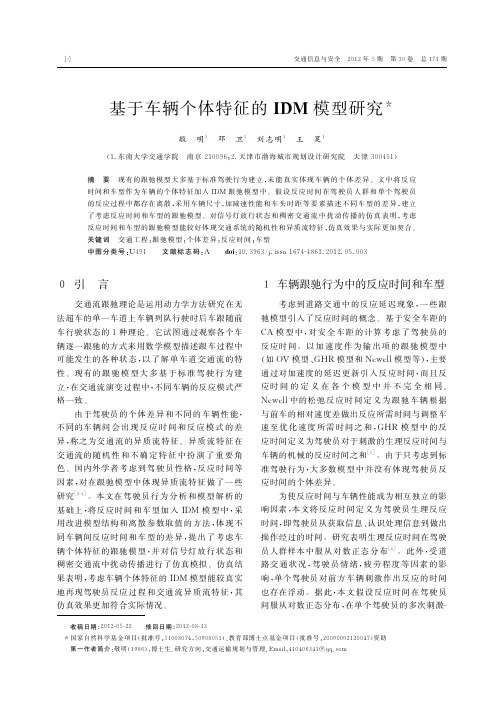
为使反应时间与车辆性能成为相互独立的影 响因素,本文将反 应 时 间 定 义 为 驾 驶 员 生 理 反 应 时 间 ,即 驾 驶 员 从 获 取 信 息 、认 识 处 理 信 息 到 做 出 操作经过的时间。研究表明生理反应时间在驾驶 员人群样本 中 服 从 对 数 正 态 分 布 。 [6] 此 外,受 道 路交 通 状 况,驾 驶 员 情 绪,疲 劳 程 度 等 因 素 的 影 响,单个驾驶员对 前 方 车 辆 刺 激 作 出 反 应 的 时 间 也存在浮动。 据 此,本 文 假 设 反 应 时 间 在 驾 驶 员 间 服 从 对 数 正 态 分 布 ,在 单 个 驾 驶 员 的 多 次 刺 激-
收 稿 日 期 :2012-05-22 修 回 日 期 :2012-08-13 * 国 家 自 然 科 学 基 金 项 目 (批 准 号 :51008074,50908051)、教 育 部 博 士 点 基 金 项 目 (批 准 号 :20090092120047)资 助
第 一 作 者 简 介 :敬 明 (1986),博 士 生 .研 究 方 向 :交 通 运 输 规 划 与 管 理 .Email:410406341@qq.com
基于车辆个体特征的IDM 模型研究———敬 明 邓 卫 刘志明 王 昊
11
反应过程中服从 正 态 分 布,结 合 模 型 分 析 和 对 仿 真效果的检验确 定 反 应 时 间 期 望 值 和 标 准 差,将 反应时间作为车辆个体特征引入IDM 模型中。
“我和我的4300款车模”
“我和我的4300款车模”作者:来源:《驾驶园》2009年第09期劳斯莱斯、凯迪拉克、奔驰、丰田,红旗、宝马、奥迪……几乎所有国内外知名汽车品牌在这里都能看到。
你可不要以为这是哪届国际汽车展的现场,其实,这些“名车”就陈列在十几平米大小的一问展览室内,8个展示柜并列排放着,里面摆满了各式各样、足以让你看得眼花缭乱的汽车模型——这就是刘天强和他的4300多个宝贝……刘天强展示车模的这间屋子是爸爸特意给他腾出来的。
“一开始数量不多的时候,模型就在沙发上杂乱地堆放着,随着车模的数量一天天变得庞大起来,爸爸就给我做了8个展柜,但还是放不下,有些只能打包放到仓库里。
没办法,太多了,没那么多地方摆。
”刘天强对记者说。
记者好奇地问他:“听说购买车模也需要花不少钱,你的爸爸妈妈就没反对过你吗?”刘天强沉吟片刻,抬起头对记者说:“他们一直以来都非常支持我,甚至可以说,没有他们的鼓励和帮助,我也许坚持不到今天!”一次收藏的启蒙教育1985年,刚刚5岁的刘天强还是个乳臭未干的孩童,那时候,他甚至还不能用自己稚嫩的小手写下“汽车”两个字。
有一次,父亲的一个朋友从国外给小天强带回来一件礼物——一个奔驰车的模型,这个模型漂亮极了,做工精细,小巧玲珑,尽管时间太久,刘天强已经记不起那是奔驰的哪款车型了,但这毕竟是他生命中的第一个车模,他至今还记得当时的那股兴奋劲儿,真是拿在手里怕摔了,含在嘴里怕化了,恨不得睡觉的时候都搂着它。
可时间一长,小天强就不“安分”起来——他把模型给拆了!“我当时就是特好奇地想知道这模型是怎么做出来的,可等我把它给拆了,却再也组装不起来了。
那天我非常害怕,怕爸爸下班回来后会责怪我,但是他没有。
他知道情况后摸着我的头说‘爱动脑筋是好事,有时候只有通过破坏才能懂得真理!’我听完马上就破涕为笑了。
我当时就发誓:如果我能再拥有一个车模,我—定要好好的爱护它!”刘天强沉浸在当年的回忆中,一脸幸福地向记者讲述着。
VISSIM驾驶行为参数和模型校正

VISSIM 驾驶行为参数调整和模型校正
居菲
上海,2013-3
VISSIM中的驾驶行为模型
生理—心理跟车模型
生理—心理跟车模型
VISSIM中的停车时平均间距已经默认附加了
±的变化幅度,因此
可由实测停车间距标定。
生理—心理跟车模型
CC7、CC8、CC9不超过加速度定义中的范围
生理—心理跟车模型Psycho-physical car following model
前视最大值:少数情况要加大,比如铁路信号建模后视最大值:路网复杂情况下减小可提高仿真速度30 30
生理—心理跟车模型
后车驾驶员在一段时间内除急刹车外不对前车行为作出反应
车道变换
车道变换
车道变换
车道变换
车辆换道时慢车道上的车辆协调刹车的最
车道变换
在减速区域超车:不选:车辆在减速区上
横向行为
观察相邻车道上车辆的位置调整横向空间
横向行为
>超车时考虑下一个转向方向
横向行为
超车时相邻车道车辆间的最小横向距离
信号控制
信号控制
调整饱和流率
调整饱和流率
99 Car Following Model
居菲
上海,2013-3。
车辆跟驰模型

为了适应更进一步的情形,把上式修改为:
..
.
.
xn1(t T ) (xn (t) xn1(t))
式中:
——为反应强度系数;
量纲为—— s 1。
5.2 跟车模型
4.稳定性分析
稳定的两层意思: 局部稳定性——是指前后两车之间的距离的变化是否稳定; 渐进稳定性——是前车向后面各车传播速度的变化。
第5章 车辆跟驰模型
第5章 车辆跟驰模型
➢ 教学目的:掌握跟驰理论的基本概念以及车辆跟驰特性分析
的方法,掌握线性跟驰模型的基本形式、推导过程以及构建方 法,了解非线性跟驰模型,熟悉交通仿真软件中采用的跟驰模 型的基本形式,掌握稳态流分析和加速度干扰的基本原理。
➢ 教学重点:
(1)线性跟驰特性分析 (2)非线性跟驰模型 (3)稳态流分析和加速度干扰
2.驾驶员的反应强度应该随车距 间距的减少而增加;
3.反应强度系数并非常量,而是 与车头间距成反比。
5.2 跟车模型
1. 车头间距倒数模型
基本公式:
xn 1 (t
T)
xn
(t
)
xn1
(t
)
[
xn (t
)
xn 1 (t )]
式中:
xn1(t T ) ——后车在时刻(t+T)的加速度,称为后车的反应;
2.假定条件 (1)前导车采取制动行为; (2)假设n车与n+1车制动距离相等,即d3=d2; (3)后车(第n+1辆车)在反应时间T内速度保持不变,
即 xn1(t) xn1(t T ) 。
3.公式推导
由图5-1所示n车与n+1辆车的空间关系可用下式表示:
s(t) xn (t) xn1(t) d1 d2 L d3
【系统仿真学报】_微观仿真_期刊发文热词逐年推荐_20140723

2009年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45
2008年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37
科研热词 仿真 跟车模型 交通流 交通仿真 高层体系结构 随机决策 配时优化 遗传算法 逾渗理论 运动学 车道变换 蒙特卡罗方法 细菌 离散时间仿真 相场方法 生物力学 有限元 智能交通系统 数值模拟 恐慌 微观组织 微观模型 微观仿真 微观交通仿真 建模 延误 尾气排放 多晶粒 多孔介质 双车动力学模型 动力学模型 仿真基础路网 人员疏散 交通态势 paramics mapx mapinfo
2012年 科研热词 量化模型 车辆比功率 电场矢量 瑞利散射 大气偏振模式 坐标系转换 动态仿真 交通排放 opengl仿真 arcgis二次开发 推荐指数 1 1 1 1 1 1 1 1 1 1
2013年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22
46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68
2009年 科研热词 微观仿真 仿真 马尔可夫过程 面铣刀 非导电工程陶瓷 铣削仿真 车头间距 跟车模型 走行特性 计算机仿真 视频采集数据 表面粗糙度 表面形貌 蚂蚁算法 虚拟失效 蒙特卡罗法 舆论动力学 背包问题 约束卡尔曼滤波 系统动力学 粒子运动轨迹 粒子模拟 粒子发散性 竞争 空间可展开天线 离散系统 离散粒子群优化算法 电火花加工 熵值法 混合仿真 混合交通流 柔性体 材料结构弱点 材料微结构 有限元方法 智能交通 方法论 数值模拟 数值仿真 放电通道 快速路 微观模型 微观仿真评价 微观仿真模型 建模 推荐指数 3 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
第六代解放J6系列重型车模型赏析
第六代解放J6系列重型车模型赏析作者:刘峰来源:《专用汽车》 2016年第11期摘要:1956年第一台解放CAl0卡车驶下生产线,解放卡车从此成为国产卡车的代名词。
从第一代中型卡车系列到第六代重型卡车系列,解放卡车一直走在国产卡车的前列,代表了中国卡车的发展。
在这个值得纪念的60周年华诞之际,让我们通过赏析解放系列卡车六代车型模型,一起重温中国卡车这段光辉岁月。
2007年7月15日,时隔第一辆解放卡车下线正好经过50周年。
在这个值得纪念的特殊日子里,解放第六代重型卡车解放J6正式下线(如图1)。
在下线仪式上,德国TOA莱茵公司代表哈斯勒向时任一汽解放总经理徐宪平颁发了验证证书,并当场宣布解放J6已经达到欧洲同类车型水平。
解放J6成为具有当代世界级水平的国产重型卡车,且完全由一汽自主研发。
一汽在2000年开发解放第五代J5之时,就开始规划对解放第六代J6的研发。
一汽将欧洲重卡标准作为解放J6的核心研发目标,开发标准定位于国际先进水平,面向当代欧洲先进卡车技术水平。
历经6年多的精心打造,一汽的研发团队解决技术难题1 500余项,实现技术创新300多项专利100余项,一次性完成J6产品5大平台、12个系列、300余种车型的开发(如图2),这种全系列产品的同时开发在国内尚属首次。
模型背景一汽解放委托东莞奥纳模型有限公司(以下简称奥纳模型公司)陆续开发了2008款J6重型牵引车、2010款J6重型自卸车、2010款J6重型混凝土搅拌运输车、2015款J6P领航版重型牵引车等24比例精品模型。
作为国产模型重要的生产厂家之一的奥纳模型公司在解放J6系列模型上花费了很多心思,整个J6系列重型汽车模型的做工在国产卡车模型中无愧于精品之作。
本文将重点介绍其中的2 010款J6重型自卸车和2015款J6P领航版重型牵引车,通过解读这两款模型,与读者共同赏析一汽解放这一里程碑式的巨作。
模型赏析1 2010款J6重型自卸车解放J6系列在2007年首先推出的是牵引车系列,为完善产品线,一汽在2010年又推出J6重型自卸车系列。
第四章现代交通流理论

第一页,本课件共有63页
▪ 4.1 概述
▪ 4.2 交通流特性的统计分布 ▪ 4.3 排队论及其应用
▪ 4.4 跟车理论
第二页,本课件共有63页
4.1 概述
▪ 何为交通流理论?
——运用物理学和数学的定律来描述交通特性的
一门边缘学科,是交通工程学的基础理论。
何为现代交通流理论
——以先进的车辆系统和智能高速道路概念为背景 ,形成的交通流新认识与理论。
▪连续型分布——负指数分布(续)
(3)负指数分布在应用中的局限性:
负指数分布概率密度
P(t) p(t)=d [1-P (h>t)] /dt=e- t
车头时距越小出现的概率越大?
0.5
1.0
1.5
2.0
t
第二十二页,本课件共有63页
4.2 交通流特性的统计分布
▪连续型分布——负指数分布(续)
(4)负指数分布的应用
度不大的多列车流的车头时距分布可采用负指数分布,常 与计数的泊松分布相对应。
(2)基本模型:车流平均到达率为(辆/秒)时,到达
的车头时距 h 大于 t 秒的概率为
= P (h>t) =(t)0e- t/0!= e- t exp(-Qt/3600)
第二十一页,本课件共有63页
4.2 交通流特性的统计分布
求任意400m路段上有4辆及4辆车以上的概率。
解:把公式中的t理解为计算车辆数的空间间隔,则本例在空间上的分布服
从泊松分布
Pk=(t)ke- t/k!= (m)ke- m/k! P0=e-m, Pk+1=mPk/k+1
t=400m, =60/4000(辆/米),m= t=6辆,
【国家自然科学基金】_车辆换道_基金支持热词逐年推荐_【万方软件创新助手】_20140730
推荐指数 5 4 3 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73
推荐指数 3 3 3 3 3 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2010年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14
科研热词 车辆识别 跟驰模型 跟车模型 盲区 灰度 换道模型 换道概率 安全工程 动能 交通运输 交通流模拟 交通流 交通工程 交通堵塞
推荐指数 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2011年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30
2013年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52
科研热词 道路通行能力 车道数 车辆跟随 车辆换道 换道模型 变结构控制 转角 车道变换 跟车模型 行为分析 自动化公路系统 结合 混合交通流 换道时间 换道加速度 换道冲突 换道 微观仿真 异质性 实证研究 双车道 协作型换道 公交车停靠站 元胞自动机 交通流 交通控制 交通仿真模型 交织区
【国家自然科学基金】_宏观交通仿真_基金支持热词逐年推荐_【万方软件创新助手】_20140731
推荐指数 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2008年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
科研热词 迭代学习控制 非参数自适应控制 非参数动态线性化 随机初始条件 入口匝道调节 随机计算模型 重复性 跟车模型 细观力学 细胞周期 碎石 模型验证 模型化 杂交骨髓瘤 智能体 数值模拟 换道模型 快速路通道 建模 广告 差别电价 寡头垄断 宏观交通流模型 参数辨识 卡尔曼滤波 元胞自动机(ca) 元胞自动机 仿真流程 仿真模型 交通流 od估计
53 agent
推荐指数 5 4 2 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2010年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40
推荐指数 3 2 2 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2009年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52
第五章车辆跟驰模型

① 行为阈值模型的缺点在于模型的参数较多。 ② 子模型之间的相互关系比较复杂。 ③ 对于各种阈值的调查观测比较困难及其通用性比较差。
5.3 跟驰行为模型
四、人工智能类模型
1、概述 该类模型主要是基于模糊逻辑,通过驾驶员未来的逻辑推
经过一些列推导············
5.2 跟车模型
变形为:
xn1(t
T
)
1 T
(
xn
(t
)
xn1(t
))
式中:
xn1(t T ) ——后车在时刻(t+T)的加速度,称为后车的反应;
1
—— 敏感度;
T
(xn(t ) xn 1(t )) ——时刻t的刺激。
即上式可理解为:反应=敏感度×刺激
2.对给定的相对速度,不管车间 距离如何变化,反应强度都是相 同的。
1. 为了考虑反应的强度这一因素;
2.驾驶员的反应强度应该随车距 间距的减少而增加;
3.反应强度系数并非常量,而是 与车头间距成反比。
5.2 跟车模型
1. 车头间距倒数模型
基本公式:
xn 1 (t
T)
xn (t)
xn1
因此,可对反应强度系数作如下改进:
2 xn1(t T )
[xn (t) xn1(t)]
xn1(t
T)
(xn (t)
xn 1 (t ))
2xn1(t T )
xn (t) xn1(t)
[
xn
(t
)
十个超酷的概念车设计模型

十个超酷的概念车设计模型概念车是一辆汽车的原型,在还没生产出来前,通过这个原型来展示新车辆的造型,技术和整体设计。
它们经常会在汽车展览上被展示来了解顾客对新的技术的反应,然后来绝对是否有机会成为产品。
概念车根本上的是在引擎或设计上。
一些使用非传统的、有异国情调,或昂贵的材料,其他的有其独特的布局,如鸥翼式车门、三到六(或两个以上)的轮子,或者是不同于寻常汽车的特殊的功能。
因为这些经常不可行或无用的功能,一些概念车从来没有通过这些模型,甚至是没有在电脑上画这样的设计图纸。
让我们去好好享受下这些不同寻常设计的概念车吧!雪铁龙Survolt在2010年日内瓦车展,雪铁龙展示了他们的新概念车- Survolt。
这是一个全电动汽车概念,提出了一种气动设计融合“飘逸的线条,传达敏捷,精度和活力——有一个强大的特征包含在它的精致豪华的行列。
”雪铁龙GT这个概念车是为了GT5赛车设计的,它的特色之一就是电气传动系,可以使用燃料电池而没有污染物的排放。
这辆车被设计用来面对最强的竞赛,这辆车的设计最后用来模拟游戏GT竞赛中了。
奥迪A9混合运动型轿车西班牙独立设计师丹尼尔贾西亚决定给宝马的想象的概念一个新的展示,那么让我们看看这辆奥迪A9(非正式的),仅仅是符合混合型和概念型的种类,也是运动型的轿车。
拥有强大的动力的概念型BMW新视野的概念宝马、将形成生产模型在2013。
运动型汽车迷称这个概念位"未来的汽车”。
我相信一定是!奥迪O奥迪O设计概念是融合一个强大的、创新的和时髦的音响系统和运动型的四座掀背式轿车。
该车外型设计是使用几个奥迪商标造型主题,特别是在前灯之间的格子型的商标。
宝马吉娜宝马吉娜改变设计规则说明概念车的特点就是巧妙的利用材料和技术。
吉娜缩略词代表的是几何中"N”。
“N”代表无限。
而乍一看宝马吉娜似乎只是一个宝马Z4 的一个翻版。
当你打开门的时候将会揭示它的本性。
布加迪Aerolithe将在2025年创造,Aerolithe被命名是在原型车布加迪被公开在1935年巴黎汽车展上。
第九章车辆跟驰模型
车辆跟驰模型是交通系统仿真中最重要的动态模 型,用来描述交通行为即人—车单元行为。
车辆跟驰模型的研究对于了解和认识交通流的特 性,进而把这些了解和认识应用于交通规划、交 通管理与控制,充分发挥交通设施的功效,解决 交通问题有着极其重要的意义。
1 / s t 1 / xn t xn1 t
..
xn1 t
T
xn
1
t xn1 t
.
xn
t
.
xn1
t
2、基于速度的车头间距倒数模型
事实上,反应强度系数不仅与车头间距成 反比,而且还与车辆速度成正比。
因此,可对反应强度系数作如下改进:
则有
.
2 xn1 t T xn t xn1 t
三、模糊推理模型
该类模型主要通过驾驶员未来的逻辑推理来研究驾驶行为。
这类模型的最大特色是将模型的输入项分为几个相互部分重 叠的模糊集,每个模糊集用来描述各项的隶属度。
例如,一个模糊集可以用来描述或量化车头时距“太近”
➢ 若车头时距小于0.5s,则“太近”这个模糊集的隶属度或真 实度就为1;
➢ 若车头时距大于2s,则“太近’’这个模糊集的隶属度或真 实度就为0;
单车道车辆跟驰理论认为,车头间距在100~125m以内时 车辆间存在相互影响。
二、车辆跟驰特性
跟驰状态下车辆的行驶具有以下特性: ➢ 制约性 ➢ 延迟性 ➢ 传递性 制约性、延迟性及传递性构成了车辆跟驰
行驶的基本特征,同时也是车辆跟驰模型 建立的理论基础。
1、制约性
微观车辆跟驰模型对比研究

微观车辆跟驰模型对比研究摘要:车辆跟驰模型是微观交通流模型研究的基础。
本文对GM模型、线性模型、安全距离模型、AP模型、模糊推理模型和神经网络的车辆跟驰模型进行了详细的评述,从传统模型入手,分析其存在的优缺点,基于此又阐述了在传统模型基础上改进的模型或者是利用新的方法建立的模型,提出了目前还存在的没有解决的问题,并且对每个模型作了中肯的评价。
为今后研究微观交通流模型提供一个比较全面的认识。
关键词:交通流;微观交通流;车辆跟驰模型;对比研究Abstract: car-following model is microscopic traffic flow model research foundation. In this paper, the GM model, linear model, a safe distance model, the AP model, fuzzy reasoning model and neural network car-following model are discussed in details, from the traditional model, and analyses the advantages and disadvantages of the existing, based on this and expounds the traditional model based on the improved model is set up by a new method or the model, put forward the current exist not solve the problem, and the model of each of the evaluation of the position. For future research microscopic traffic flow model to provide a more comprehensive understanding.Keywords: traffic flow; Microscopic traffic flow; Car-following model; Contrast research1跟驰模型跟驰理论是运用动力学方法,研究在无法超车的单一车道上车辆列队行驶时,后车跟随前车的行驶状态,并且用数学模型来表达并加以分析阐明的一种理论。
基于期望车速的跟驰模型研究

基于期望车速的跟驰模型研究吕贞;陆建【摘要】期望车速是驾驶员驾车过程中依据道路条件、车流状况、所驾驶车辆性能等因素,经综合考虑后存在于自身心目中并认为可以实现的一种"目标车速",它对行驶车辆的实际行车速度高低产生影响.为了反映车辆运行过程中不同驾驶员运行车速选择的差异,本文提出了基于期望车速的跟驰模型.该模型能够解释不同驾驶员在相同道路条件下选择不同行车速度的原因.在建立模型的基础之上,作者讨论了保持交通流稳定性的充分和必要条件.最后,文中给出了应用实例.结果表明:当驾驶员的期望车速接近均衡车速时,交通流是稳定的;反之,当驾驶员期望车速与均衡车速差异较大时,交通流的稳定性可能下降.【期刊名称】《交通运输工程与信息学报》【年(卷),期】2010(008)003【总页数】6页(P68-73)【关键词】期望车速;跟驰模型;均衡速度;交通流;稳定性【作者】吕贞;陆建【作者单位】东南大学,交通学院,南京,210096;东南大学,交通学院,南京,210096【正文语种】中文【中图分类】U4910 引言交通流跟驰模型是从人车单元运动与相互作用的层次上分析交通流微观特性,探究在单一车道上车辆排队行驶时,后车跟随前车的行驶状态,并用数学模式加以分析阐明的一种理论[1]。
在以往的用跟车模型分析交通流稳定性的研究中,大多是基于刺激-反应的模型,反应时间越长、敏感系数越大则说明交通流越不稳定[2]。
但是,这些模型无法解释在拥挤流状态下(反应时间、敏感性等趋于一致)交通流不稳定的原因。
事实上,即使在同一反应时间和同样的敏感度等条件下,不同的驾驶员也会表现出不同的驾驶行为特征。
对高等级公路行车速度的交通调查结果表明:对于道路条件相同、交通环境相似的同一路段,有的驾驶员趋向于选择较高车速,而有的驾驶员趋向于选择较低的车速。
造成这一现象背后的深层次原因在于不同的驾驶员个体思想中都有不同期望车速[3]。
期望车速指驾驶员驾车过程中依据道路条件、车流状况、所驾驶车辆性能等因素经综合考虑后存在于自身心目中并认为是可以实现的一种“目标车速”。
基于多前车最优速度与加速度的网联车跟驰模型

基于多前车最优速度与加速度的网联车跟驰模型随着人工智能和自动驾驶技术的发展,网联车(即无人驾驶车辆之间的通信和协同工作)成为了未来交通领域的热门话题。
网联车的出现可以大大提高交通效率和安全性,减少交通事故和拥堵,减少能源消耗和排放。
网联车跟驰技术是关键的一环,它可以让车辆之间通过通信实时协调速度和跟车距离,保持适当的间隔和速度,从而实现高效、安全、平稳的行驶。
本文将介绍基于多前车最优速度与加速度的网联车跟驰模型。
一、网联车跟驰模型的基本概念网联车跟驰模型是指车辆之间通过通信和协同控制,保持适当的跟车距离和速度,从而实现高效平稳的跟车行驶。
网联车跟驰模型通常包括两个基本要素:速度控制和距离控制。
速度控制是指车辆之间通过调整车速来实现跟车,而距离控制是指车辆之间通过控制车辆间的距离来保持安全行车。
在传统的车辆跟驰模型中,一般会考虑车辆的速度、跟车距离、加速度等因素,然后通过一定的数学模型和控制算法来实现跟驰控制。
而基于多前车最优速度与加速度的网联车跟驰模型则是在传统模型的基础上,进一步考虑了前车的影响因素,并通过算法来实现更精准、更高效的跟车控制。
这种模型需要考虑前车的速度、加速度、行驶轨迹等信息,然后通过计算和优化,确定最优的速度和加速度,从而实现更加安全、平稳、高效的跟车行驶。
1. 前车信息的获取和分析基于多前车最优速度与加速度的网联车跟驰模型需要通过通信和传感网络获取前车的实时信息,包括速度、加速度、距离等。
然后需要对这些信息进行实时的分析和处理,确定前车的运动状态,从而为跟车控制提供准确的数据基础。
2. 多前车数据的整合和优化3. 控制算法的设计和优化1. 更高的精确度和稳定性:通过考虑多前车的综合影响,可以更加准确、稳定地控制车辆的速度和距离,从而实现更高的跟车效果。
2. 更高的效率和安全性:通过优化算法和数据整合,可以使得车辆跟车行驶更加高效、平稳,减少交通事故和拥堵,提高交通效率。
3. 开放式平台的应用前景:基于多前车最优速度与加速度的网联车跟驰模型可以作为开放式平台,为其他自动驾驶系统和智能交通系统提供基础技术支持,具有广泛的应用前景。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
长沙理工大学
5.6 跟车模型的应用
判断车流的稳定性 判断追尾的可能性 可以预测和研究车队的运行特性 通过计算机处理,可以研究行车的安全性 高速公路上的跟车特性,最适用于跟车理论
可以用来控制稳定通行能力
长沙理工大学
X n (t ) X n 1 (t )
[ X n (t ) X n 1 (t )]
长沙理工大学
5.3 跟车模型的一般形式
1961年,加赛斯又提出了GM跟车模型的一般公式。 模型形式:
X n 1 (t T )
[ X n 1 (t T )]
m l
X n (t ) X n 1 (t ) T X n 1 (t T )
X n 1 (t T )
1 T
[ X n (t ) X n 1 (t )]
长沙理工大学
5.1 线性跟车模型
线性跟车模型的解释说明 T :随车反应时间
(1/T):灵敏度
流的运行特性。
跟车理论的研究开始于50年代,1950年Reushel和1953年Pipes对跟车过 程的研究,标志着跟车理论解析方法研究的开始。Gazis、Herman、
Rothory等人于1960年前后在美国通用汽车动力实验室提出的GM系列
模型,成为早期跟车理论中最重要的工作。
长沙理工大学
5.1 线性跟车模型
n+1 n
a状态 时刻t两车的位置
S(t)
Xn+1(t) Xn(t) 前车开始减速的位置 d3
n+1
n+1
n
d1
d2 后车开始减速的位置 b状态
L
完全刹车后两车的位置
长沙理工大学
5.1 线性跟车模型
基本假定 前导车和后续车的减速制动距离相等 在反应时间内,后续车的速度保持不变 刺激由前车引起 推导过程
跟车模型: X 加速度:a
n 1
(t ) [ X n (t t ) X
n 1
n 1
(t t )]
1 2
[X
(t t ) X 1 2
n 1
(t )]
速度: X
n 1
(t ) X
n 1
(t t )
[X
n 1
跟车模型
2012年12月
长沙理工大学
概 述
跟车模型考虑的是车流中的单体,又称为车流的单体微观分析理论 。 定义:指使用动力学的方法,在大密度的情况下,探究在无法超车的
单一车道上车辆列队行驶时,后续车跟随前导车的行驶状态,并使用
数学模型表达而加以分析的一种理论。 研究目的:试图通过观察各个车辆逐一跟驰的方式来了解单车道交通
(t t ) X
n 1
(t )]t (t ) t
1 位移:X n 1 (t ) X t ) X
n 1
长沙理工大学
第n辆车的状态已定,关键要求第( n 1)辆车的状态 模型求解的目的是确定第( n 1)辆车的速度和位移计算公式 基本公式:V V0 at;S S 0 V0t
1 2
at (匀变速运动公式)
2
跟车模型: n 1 (t ) [ X n (t t ) X n 1 (t t )] X 加速度:a
1 2
[ X n 1 (t t ) X n 1 (t )]
速度: n 1 (t ) X n 1 (t t ) X
车辆跟驰的特性(非自由行驶状态的特性) 制约性
延迟性
传递性 线性跟车模型
刺激-反应问题
刺激:由于前导车的加速或减速而引起的前导车与随车 之间的速度差或车头间距的变化
反应:随车为了紧密而又安全地跟随前导车而做出的加 速或减速的操作动作
长沙理工大学
5.1 线性跟车模型
线性跟车模型示意图
S (t ) d 3 d1 d 2 L S (t ) d1 L X n (t ) X n 1 (t ) d1 L
d1 T X n 1 (t ) T X n 1 (t T )
X n (t ) X n 1 (t ) X n 1 (t T ) T L
长沙理工大学
5.1 线性跟车模型
渐进稳定:速度的变化有向其后各车传播的特性,如果 速度变化的振幅在传播过程中增大了,叫做不稳定;如 果振幅逐渐衰减则叫做稳定,这种情形我们就称之为渐 近稳定。 局部稳定考虑的是车辆之间的局部行为,而渐近稳定考 虑的是一列车队(除排头车)运行的稳定性情况。 海尔曼通过研究表明,以C是否大于0.5作为衡量车队是 否稳定的指标。若C >0.5,那么不稳定,此时有尾撞事 故的发生;若C <0.5,那么就是一种渐近稳定。
C值
0C<1/e 1/eC<π/2 C=π/2 C> π/2
间距摆动情况
基本稳定 衰减摆动 非衰减摆动 摆动幅度增大
长沙理工大学
5.1 线性跟车模型
局部不稳定的原因是由于 C 值过大,而 C 值过大的原因 有 过大或 T 过大。因此反应慢或对相同刺激的反应太
强烈都会使车流趋向于不稳定。
长沙理工大学
5.2 非线性跟车模型
线性跟车模型的特点 优点:模型简单,对稳定分析很敏感;
缺点:后续车的反应仅仅为前后两车相对速度的函数, 而没有考虑到车辆之间的距离。
非线性跟车模型 1959年,加赛斯采用灵敏度系数 与车头间距成反比 的关系得到了非线性跟车模型。 模型: X n 1 (t T )
1 2
[ X n 1 (t t ) X n 1 (t )]t
1 1 2 位移:X n 1 (t ) X n 1 (t t ) X n 1 (t t ) t [ X n 1 (t t ) X n 1 (t )]( t ) 2 2 1 X n 1 (t t ) X n 1 (t t ) t X n 1 (t ) X n 1 (t t ) t 2 1 X n 1 (t t ) X n 1 (t t ) X n 1 (t ) t 2
(t ) X
n 1
C ( t )]
n 1
(t ) V
n 1 (t )
X n (t ) X
1
k
ln V k C
K 0,V V
f
K K m , Q max KV
k km
V Vfe
长沙理工大学
5.5 线性跟车模型的求解
求解模型 基本假设:假定在每一个微小的时间段t内,加速度是一 致的,等于每一时段开始与结束时刻计算加速度的平均值。 基本公式:
[ X n (t ) X n 1 (t )]
[ X n (t ) X n 1 (t )]
模型特点:跟车模型的一般公式认为,后续车的跟驰反 应不仅与它和前导车之间的速度差有关,还与两辆车之 间的间距及后续车本身的速度有关。
长沙理工大学
5.4 跟车模型与车流模型
车流模型是指在稳定的车流中,流量、速度与密度三者之 间的相互关系,如Greenshields、Greenberg、Underwood
X n (t ) X n 1 (t )
:时刻 t 刺激
X n 1 (t T )
:随车反应
模型的简化
反应(t T ) 灵敏度 刺激(t ) X n 1 (t T ) [ X n (t ) X n 1 (t )]
为反应强度系数,与司机操作动作的强烈程度相关
例:m=1,l=2导出Underwood指数模型
X n 1 ( t T )
Ln [ X
X
X
n 1
(t T )
n 1 ( t )] 2
[ X n (t ) X
X
n
(t ) X
n 1 (t )
n 1
( t T )] [X
n
长沙理工大学
5.1 线性跟车模型
线性跟车模型的稳定性
局部稳定:若前后两车的速度大致相等,车间距离大体保持 某一常数值,叫做局部稳定。局部稳定涉及的是随车对前车 的波动反应,是指两车之间的局部行为。 局部稳定条件:1959年海尔曼使用拉普拉斯变换来求解微分 方程,得到了车辆跟驰的局部稳定性条件。(C = T)
速度—密度模型都是车流模型的形式。
从跟车模型出发,可以得到各种速度—密度关系,即可由 微观的跟车模型推导出宏观的车流模型,方法是根据边界
条件来解微分方程。
实例分析 m=0,l=2导出Greenshields线性模型 m=1,l=2导出Underwood指数模型
长沙理工大学
5.4 跟车模型与车流模型