基于基本矩阵的匹配算法研究
一种基于相似度矩阵的本体检索匹配算法
Co mp u t e r En g i n e e r i n g a n d Ap p l i c a t i o n s , 2 0 1 3 , 4 9 ( 2 2 ) : 1 2 7 — 1 3 1 .
Ab s t r a ci s ma t c h p r o b l e m b e t we e n t he u s e r q u e r i e s wi h t he t k n o wl e d g e o f t h e d o c u me n t , p u t f o r wa r d a b o d y r e - t r i e va l b a s e d o n t h e s i mi l a r i t y ma t r i x ma t c h i n g a l g o r i t h m. Th e me t h o d i s a n i mp r o v e me n t o n t h e e x i s t i n g s e a r c h ma t c h i n g a l g o -
关键 词 : 本 体 匹配 ; 知 识检 索; 相 似度 计 算 ; 分类 文 献标 志码 : A 中图分 类 号 : T P 3 1 1 d o i : 1 0 . 3 7 7 8  ̄ . i s s n . 1 0 0 2 — 8 3 3 1 . 1 2 1 2 . 0 3 2 7
l 引 言
摘
要: 针对 用户 查 询 与知 识文 档 间检 索失 配 问题 , 提 出了一种 基 于相 似 度 矩 阵的 本体 检 索 匹 配算 法 。该 方法 是对 现 有
的检 索 匹配 算 法的 一种 改进 。方 法 利 用领 域 本体 来 快速 确 定候 选 匹配 集; 进 而从 三 个层 次 来 综合 计 算 元 素 间的相 似 度 ; 利 用相 似度 矩 阵得 到 两本体 间 的相 似度 。 实验 结 果表 明 , 在 查全率 、 查准 率和 响应 时 间方 面都有较 好 的表现 。
图像识别技术中的特征提取与匹配算法研究
图像识别技术中的特征提取与匹配算法研究随着计算机视觉领域的快速发展,图像识别技术在各个领域得到了广泛应用。
图像识别技术的核心问题之一是如何从大量的图像数据中提取出有效的特征,以便进行图像匹配和识别。
本文将重点讨论图像识别技术中的特征提取与匹配算法的研究。
一、特征提取算法特征提取算法是图像识别技术中最基础、最关键的环节之一,它通过对图像中的有效信息进行提取和表示,以便后续的匹配和识别过程。
常用的特征提取算法包括SIFT(尺度不变特征变换)、SURF(加速稳健特征)、ORB(旋转矩不变特征)等。
SIFT算法是一种基于尺度空间的特征提取算法,它通过检测尺度不变的局部极值点,并在多个尺度下提取出稳定的特征。
SIFT算法对图像的旋转、缩放、平移等变换具有较好的不变性,是目前应用最广泛的特征提取算法之一。
SURF算法是一种基于Hessian矩阵的特征提取算法,它通过检测图像中的兴趣点,并计算其局部特征向量来描述图像信息。
与SIFT算法相比,SURF算法在保留了较好的特征表达能力的同时,大大加快了计算速度,因此在实时图像处理中得到了广泛应用。
ORB算法是一种结合了FAST特征检测和BRIEF特征描述的特征提取算法,它通过检测图像中的FAST角点,并用二进制位串来描述角点周围的灰度信息。
ORB算法既具有较好的特征表达能力,又在计算速度上有很大优势,因此在大规模图像检索等应用中表现出色。
二、特征匹配算法特征提取后,需要进行特征匹配以实现图像的识别和检索。
特征匹配算法的目标是找出两幅图像中相似的特征,并建立它们之间的对应关系。
在特征匹配过程中,常用的算法包括暴力搜索、k-d树算法和近似最近邻搜索算法等。
暴力搜索是一种简单直观的特征匹配算法,它通过遍历所有特征点对之间的距离来实现匹配。
暴力搜索算法的优点是简单易实现,但由于计算量大,在大规模图像匹配中往往不够高效。
k-d树算法是一种基于树结构的特征匹配算法,它通过构建k-d树来实现对特征点的快速搜索。
基于深度学习的立体匹配算法研究

基于深度学习的立体匹配算法研究立体匹配是计算机视觉中重要的任务之一,旨在通过分析图像中的特征及其在不同视角下的变化来推断深度信息。
这项任务对于建立真实感三维场景重建、目标检测与跟踪、姿态估计和机器人导航等应用都至关重要。
而随着深度学习的发展,基于深度学习的立体匹配算法在这个领域的研究成为了热点。
立体匹配的目标是在左右两个摄像机图像中寻找对应的点,通过这些对应点的位置差异来估计深度。
然而,由于遮挡、光照变化、纹理缺失等因素的干扰,传统的立体匹配算法面临一系列的挑战。
而深度学习的引入,使得立体匹配的性能得到了显著提升。
基于深度学习的立体匹配算法通常采用卷积神经网络(Convolutional Neural Network, CNN)来提取图像的特征表示。
CNN具有自动学习特征表示的能力,可以更好地捕捉到图像中的纹理信息和结构特征。
同时,为了解决立体匹配中的各种问题,研究者们提出了一系列基于深度学习的方法。
一种常见的基于深度学习的立体匹配算法是使用卷积神经网络进行特征匹配。
这类方法将左右图像作为CNN的输入,网络的输出是一个代表匹配度的矩阵,通过寻找矩阵中的最大值或较高的像素值来确定左右图像中对应点的位置。
其中,匹配代价函数的设计至关重要,常用的代价函数包括基于像素差异的、结构相似性度量(SSD)、均方差(MSE)等。
此类算法可以在不同视角下捕捉到图像的特征差异,但由于缺乏全局约束,容易出现误匹配的情况。
为了解决误匹配问题,另一类算法引入了全局约束来提高立体匹配的准确性。
这些算法通过将立体匹配问题转化为优化问题,利用深度学习模型生成代价图,并利用全局优化算法(如图割、动态规划等)来找到最优的匹配结果。
这种方法的优势在于可以通过考虑整个图像的上下文信息来提高准确性,但计算复杂度较高。
除了基于CNN的方法,还有一些基于生成对抗网络(Generative Adversarial Network, GAN)的立体匹配算法。
红外与可见光图像特征点边缘描述与匹配算法

红外与可见光图像特征点边缘描述与匹配算法1. 绪论:介绍红外与可见光图像的特点、研究背景和意义,以及本论文的研究内容和目的。
2. 相关技术:阐述图像特征点的概念与常见算法,比较红外与可见光图像在特征提取上的区别。
3. 红外与可见光图像特征点边缘描述算法:详细介绍红外与可见光图像特征点边缘描述算法的原理与步骤,包括SIFT、SURF、ORB等算法的优缺点分析。
4. 红外与可见光图像特征点匹配算法:详细介绍红外与可见光图像特征点匹配算法的原理与步骤,包括基于基础矩阵的匹配、基于特征向量的匹配等算法的比较与分析。
5. 实验结果与分析:通过实验验证红外与可见光图像特征点边缘描述与匹配算法的有效性和可行性,对实验结果进行详细的分析和总结,展望该算法的应用前景。
第一章绪论1.1 研究背景红外图像和可见光图像在不同场景下具有不同的特征和应用。
红外图像能够穿透烟雾、雾霾等复杂环境,对有温度差异的物体有很好的探测效果,而可见光图像则可以获得物体表面直接反射的信息。
因此,利用两种图像的优点配合,可以更好的完成特定应用的任务。
在军事、安保、医疗等领域,常常需要对物体进行识别和定位。
传统的手动识别和定位方式效率低下且容易出错,而基于计算机视觉的图像识别方法可以自动高效地完成这些任务。
如何提取红外与可见光图像中的特征信息并完成图像匹配成为了研究的热点之一。
1.2 研究意义红外与可见光图像特征点的边缘描述与匹配是计算机视觉领域的基础问题。
开展相关研究可以完善计算机视觉技术在军事、安保、医疗等领域的应用,促进计算机视觉技术在实际应用中的推广和发展。
1.3 研究内容与目的本研究旨在探究红外与可见光图像特征点的边缘描述与匹配算法。
具体包括以下内容:(1) 红外与可见光图像特征点的提取方法。
(2) 红外与可见光图像特征点的边缘描述算法。
(3) 红外与可见光图像特征点匹配算法。
(4) 实验设计与分析。
本文的主要研究目的是开发高效、准确的红外与可见光图像特征点匹配算法,提升计算机视觉技术的应用效果。
匹配矩阵 损失函数
匹配矩阵损失函数
在机器学习和深度学习领域,匹配矩阵和损失函数是两个重要的概念。
它们不仅可以帮助研究者了解数据,也可以帮助他们更高效地训练模型。
因此,有必要介绍这两个概念。
首先,什么是匹配矩阵?这是一种称为“矩阵匹配”的数据处理技术,旨在检测和匹配数据中的特征。
从算法的角度来看,其原理包括比较输入特征和数据集中的所有特征,然后给出一个特征的最佳匹配,以衡量数据之间的相似性。
这种算法常用于数据挖掘和机器学习应用中,其目的是从大量数据中提取出有用的信息。
损失函数是机器学习和深度学习领域中另一个重要概念,它与匹配矩阵紧密相关。
简而言之,损失函数定义为模型预测出的结果与实际结果之间的差异。
这有助于我们理解模型是如何表现的,并可以帮助我们确定模型是否拟合数据集。
损失函数的主要目的是最小化预测的误差,以确保模型尽可能准确地拟合数据。
通常,我们使用两种不同类型的损失函数:回归损失和分类损失。
回归损失是一种评估回归算法(例如线性回归和支持向量机)的损失函数,用于衡量模型预测值与实际值之间的误差。
分类损失函数则用于衡量分类算法的性能,例如逻辑回归和神经网络。
匹配矩阵和损失函数在机器学习和深度学习领域都有重要的作用。
矩阵匹配技术可以帮助研究者从大量数据中提取出有用的信息,而损失函数则可以度量模型预测的精确程度。
此外,这两种技术还可以帮助研究者更有效地训练模型,从而提高深度学习应用的性能。
基础矩阵
基础矩阵及其求法同一三维场景在两个不同视点处得到的两幅二维图像之间的几何关系——极几何以及极几何的代数表示——基础矩阵。
两幅图像可以是由两个摄像机在不同位置同时采集的,也可以是同一摄像机顺序采集的,例如摄像机相对场景移动。
对于这两种情况,几何上认为是相等的。
一般地,同一世界坐标系下的同一物体的图像间存在一种几何上的对极约束关系。
在立体视觉中,可以利用图像点的匹配来恢复这种几何关系,反过来,也可以利用这种几何关系来约束匹配,使得对应点的搜索范围由二维平面降低到对应一维极线,使得匹配的鲁棒性、精度都得到很大提高。
对极几何关系在数学上可以用基础矩阵F 来表示,因此,对极几何问题就转化为对基础矩阵F 的估计问题。
精确地计算F 对于标定、寻找精确匹配和三维重建都有重要意义。
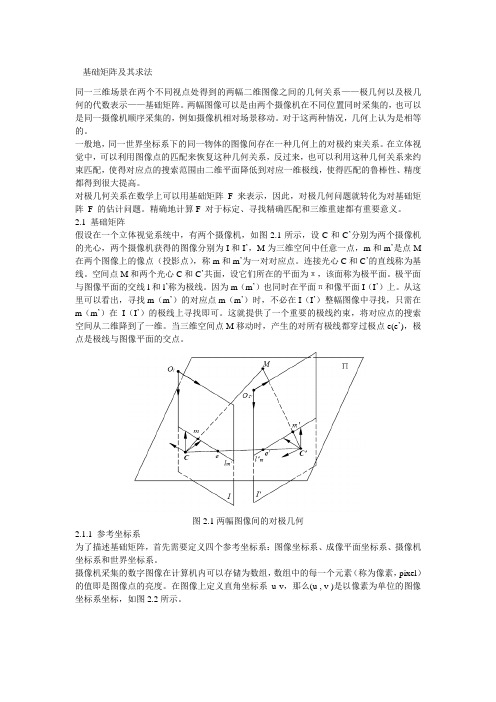
2.1 基础矩阵假设在一个立体视觉系统中,有两个摄像机,如图2.1所示,设C和C’分别为两个摄像机的光心,两个摄像机获得的图像分别为I和I’,M为三维空间中任意一点,m和m’是点M 在两个图像上的像点(投影点),称m和m’为一对对应点。
连接光心C和C’的直线称为基线。
空间点M和两个光心C和C’共面,设它们所在的平面为π,该面称为极平面。
极平面与图像平面的交线l和l’称为极线。
因为m(m’)也同时在平面π和像平面I(I’)上。
从这里可以看出,寻找m(m’)的对应点m(m’)时,不必在I(I’)整幅图像中寻找,只需在m(m’)在I(I’)的极线上寻找即可。
这就提供了一个重要的极线约束,将对应点的搜索空间从二维降到了一维。
当三维空间点M移动时,产生的对所有极线都穿过极点e(e’),极点是极线与图像平面的交点。
图2.1两幅图像间的对极几何2.1.1 参考坐标系为了描述基础矩阵,首先需要定义四个参考坐标系:图像坐标系、成像平面坐标系、摄像机坐标系和世界坐标系。
摄像机采集的数字图像在计算机内可以存储为数组,数组中的每一个元素(称为像素,pixel)的值即是图像点的亮度。
基于矩阵相似度的最佳样本块匹配算法及其在图像修复中的应用
( 西南交通大学信息科学与技术学院 成都 6 1 0 0 3 1 ) ( 西藏大学工学院 拉萨 8 5 O O O O )
摘 要 在基 于纹理合成 的图像修 复算法中, 最佳样本块 匹配算法存在 匹配精 度不 高和时 间复 杂度 高等 问题 。针 对
a n d e x e mp l a r s wa s me a s u r e d b y u s i n g ma t ix r s i mi l a r i t y, S O , t h e c a n d i d a t e s e t o f o p t m a i l e x e mp l a r wa s p r e l i mi n a r i l y d e —
t e r mi n e d i n r e l a t i v e l y c o a r s e g r a n u l a r i t y . S e c o n d l y , t h e p i x e l a t m c h i n g a l g o r i t m h wa s c o n s t r u c t e d a n d t h e ma t c h i n g d e — g r e e b e t we e n c o r r e s p o n d i n g p i x e l s wa s me as u r e d b y i n n e r p r o d u c t o f e r r o r ma t r i x b e t we e n t e mp l a t e a n d c a n d i d a t e e x - e mp l a r , S O , t h e f i n a l o p t i ma l e x e mp l a r wa s d e t e r mi n e d i n f i n e g r a n u l a r i t y . Th e b l o c k ma t c h i n g a l g o r i t h m c a n r e d u c e t h e t i me c o mp l e it x y wh i l e t h e p i x e l ma t c h i g n a l g o r i t m h c a n i mp r o v e ma t c h i n g a c c u r a c y , t h e r e f o r e , t h e o p t i ma l e x e mp l a r ma t c h i n g a l g o r i t h m b a s e d o n ma t r i x s i mi l a r i t y c a n i mp r o v e ma t c h i n g a c c u r a c y wi t h o u t r a i s i g n t i me c o mp l e x i t y . Th e e x - p e r i me n t a 1 r e s u l t s d e mo n s t r a t e t h a t , c o mp a r e d wi t h c u r r e n t t e x t u r e - b a s e d i n p a i n t i n g a l g o r i t m , h t h e p r o p o s e d a l g o r i t m h
数字图像处理中的特征提取和匹配技术研究
数字图像处理中的特征提取和匹配技术研究随着技术的发展,数字图像处理已经广泛应用于生产、生活和娱乐中。
数字图像处理中的特征提取和匹配技术是其中一项重要的技术,可以在大量的图像中迅速地寻找到关键信息。
本文将介绍数字图像处理中的特征提取和匹配技术的研究进展。
一、特征提取特征提取是数字图像处理中的一个非常重要的步骤,其主要作用是在图像中提取有意义的信息区域。
这些信息区域通常可以用来表示图像的一些重要特征,比如形状、颜色、纹理等。
通常情况下,特征提取分为两大类:1.基于局部特征的特征提取基于局部特征的特征提取是指从局部区域提取有意义的特征,比如角点、边缘等。
这种方法通常基于各种滤波器和算子,比如Sobel算子、Canny算子等。
这种方法的优点是计算速度快,但是不够精确。
2.基于全局特征的特征提取基于全局特征的特征提取是指从整幅图像提取有意义的特征。
这种方法通常基于各种统计学方法,比如直方图等。
这种方法的优点是精确度高,但是计算速度较慢。
二、特征匹配特征匹配是数字图像处理中的另一个非常重要的步骤,其主要作用是在图像中寻找到相似的特征区域。
特征匹配通常有以下两个步骤:1.特征描述在计算机视觉的领域中,特征点描述符是非常重要的。
其作用是将提取出的特征点转换成可以用于匹配的向量。
为了保证特征描述的准确性,不同的描述算法被研究出来。
其中,SIFT算法是较为常见的一种算法。
2.特征匹配特征匹配是指找到一对匹配的特征点,通常是在两幅图像之间进行匹配。
特征匹配通常有以下两种方法:i.基于相似度的匹配基于相似度的匹配是通过计算两个特征向量之间的相似度来实现的。
其中,欧几里得距离和海明距离是比较常见的两种相似度计算方法。
ii.基于基本矩阵的匹配基于基本矩阵的匹配是将两幅图像之间的特征点匹配看作一个几何变换问题。
通过计算两个图像的基本矩阵,可以得到两个图像之间的匹配关系。
其中,RANSAC算法是常见的一种算法。
三、应用数字图像处理中的特征提取和匹配技术已经广泛应用于多个领域。
基于改进遗传算法的基础矩阵估计方法
—
摘 要 : 基础 矩 阵 估 计 是 计 算机 视 觉 的基 础 。 提 出 了一种 新 的 基 于 改进 遗 传 算 法 的基 础 矩 阵 估 计 方 法 , 以 8个 匹 配 点 它 作 为 最 小 匹配 点 集 组 成 染 色体 , 利 用改 进 8点 法 估 计 出相 应 的基 础 矩 阵 , 并 同时 以对 极 距 离为 核 心 构造 适 应度 函 数 , 并 对传 统遗 传 算 法进 行 了优 化 改进 。 实验 证 明 , 方 法 在估 计精 度 和 鲁棒 性 等 方 面有 很 大提 高 , 此 易于 实 际应 用 。 关键 词 : 基础 矩 阵 ; 极 几何 ; 对 改进 8点 法 ; 进 遗传 算 法 改 文章 编号 :02 8 3 (0 63 — 0 7 0 文 献标 识 码 : 中 图分 类 号  ̄P 3 1 10 — 3 12 0 )4 0 5 — 3 A T P 9
Ab t a t F n a n a m x simt n i h e c n e t o o u e s n A e t o fr e t mt g u d ・ sr c : u d me t1 Ma E tn i s t e k y o tn f C mp tr Vii . n w me h d o si i F n a o o n n me t l Ma r b s d o h p o e Ge e i g rt m s r p s d I u e i h p i t o f r e c c r mo o a t e n a t x a e n n r v d i n t Al oi c h i p o o e , s s e g t o n s t m a h h o s me s h t o
数据结构代码相似度检测
数据结构代码相似度检测数据结构代码相似度检测是一项用于比较两个或多个代码片段之间的相似度的任务。
相似度检测对于软件开发中的代码复用、代码查重、代码抄袭检测等方面都非常重要。
在数据结构领域,相似度检测可以用于比较不同实现方式的数据结构,或者比较同一数据结构在不同环境下的使用情况。
2.代码指纹:通过计算代码片段的散列值或者哈希值,可以得到代码片段的指纹。
代码指纹可以用于比较两个代码片段之间的相似度。
常用的指纹算法包括MD5、SHA-1等。
通过计算两个代码片段之间的指纹相似度,可以判断它们的相似度。
3.抽象语法树(AST):代码片段可以被表示为抽象语法树。
通过比较两个抽象语法树之间的结构和节点,可以得到两个代码片段之间的相似度。
抽象语法树可以通过解析代码片段来生成。
除了相似度度量方法,还可以使用各种算法来实现数据结构代码相似度检测。
1. 基于字符串匹配的算法:可以使用字符串匹配算法,如KMP算法、Boyer-Moore算法等来比较两个代码片段之间的相似度。
这些算法可以在时间复杂度上得到较好的性能。
2.基于矩阵计算的算法:可以使用矩阵计算算法,如SVD(奇异值分解)或者PCA(主成分分析)等来比较两个代码片段之间的相似度。
这些算法可以在特征提取和降维上得到较好的性能。
3. 基于聚类的算法:可以使用聚类算法,如K-means聚类、DBSCAN 聚类等来比较多个代码片段之间的相似度。
聚类算法可以将相似的代码片段归为一类,并给出相似度的度量。
数据结构代码相似度检测是一个复杂的任务,需要综合考虑代码的语法结构、代码逻辑和代码执行过程等因素。
为了提高相似度检测的准确性和效率,可以结合多种相似度度量方法和算法进行检测。
此外,还可以使用机器学习和深度学习等方法来训练模型,从而提高相似度检测的性能和可扩展性。
基于小波高精度点匹配的基本矩阵估计

文章 编 号 : 6 36 3 ( 0 0 0 — 1 20 17 —3 82 1 )20 1—4
基 于小 波 高 精 度 点 匹 配 的基 本 矩 阵估 计
陈 杰 ,郝 向 阳 ,刘松 林 , 宇超 群
( 息工 程 大学 测绘 学 院 , 南 郑 州 信 河 405) 5 0 2
摘 要 : 用 2视 图进 行 景 物 的 3维 重 构 中, 本 矩 阵 的 估 计 是 一 个 非 常 重 要 的 问 题 。 目前 无 论 是 线 性 算 法 还 利 基 是 非 线 性 算 法 , 估 计 基 本 矩 阵 时都 不 太 理 想 。 这 里 采 用 图像 的 Har s角 点 作为 端 点 , 过 基 于 小 波 变 换 的 在 ri e 经
Ab ta t t’ n i po t n o e o e tm at he f da e a a rx n t o m a s f D ons r c i n. sr c :I S a m r a t pr blm t s i e t un m nt lm t i i w i ge or 3 c t u to N O , i ’ otp f c o do t i b h wih t i e nd no -i r ag ihm . The H a rs c a a t rs i i t W t S n ere t t h s ot t heln ra n l ne lort r i h r c e itc po n s we e u e s xt e iy O et h gh p e ii n r s d a e r m t t g t e hi — r c so m a c n p nt by t wa o athi g u ln s g e t hig oi s he y f m c n s b-i e e m nt whih ba e n wa l tta f r a i c s d o vee r ns o m ton, a d t n, n r a ie eg — oi l ort m op e a te s n he o m lz d i htp nta g ih pr os d by H rl y wa us d t s i a e t gh p e ii u a e t lm a rx. The tue i a x rm e ss w e t tt s m e ho e o e tm t he hi — r c son f nd m n a t i r m ge e pe i nt ho d ha hi t d wasa e t m pr e t r cso ff da e a a rx e tm a in. bl o i ov he p e ii n o un m nt lm ti s i to Ke r : o p e ii y wo ds c m ut r vson; f nd m e t l a rx; r bu t s i a i n; e t a tn f a u e po n s s -i e — u a n a m ti o s e tm to x r c ig e t r i t ; ub lne s g me ae ntm t h
基于五点算法估计基础矩阵的研究

( c ol f noma o cec Sh o o fr t nSi e&E gneig C nrl ot nvri 。 h n sa4 08 。hn ) I i n n ier , et uhU ie t C agh 10 3 C ia n aS sy
和
左乘 , 限 极
基础矩 阵是 3×3的方阵 , 且秩为 2 。由于基础矩 阵在相差一个 尺度 量的意义下是 确定 的,它只有 8个
未知量 , 8个对应点对 , 取 产生 8个矩阵方程 :
( Y 1 F( , ,) ,, ) Y 1 :0 () 2
其 中矩阵 / 兰 [ ] / t R被称 为本质矩 阵n ¨。是 一 秩为2 的3×3 矩阵 , 自由度为 5 。故仅需 5 点便 可以线 性确定本质矩 阵。通 过与基 础矩 阵的转化 关 系, 便可 以确定基 础矩 阵。
L n utHg is 8点算法 和 H re o ge— i n 的 g aty的改进 8点算 l 法 。前者计算简单 , 于实现 , 对噪声 异 常敏感 ; 易 但 后 者则通过在计算前对二维数据进行规范化处理 ( 平
移和 尺度变换) , 减小 了噪声 对实验 结果 的影 响。最
小 点对应算 法主要有 “ 一 算法 ” “ 6点 和 5点算 法” 。其 基本思 想是利用 场景提供 的某些 信息 , 可以减少 点对 应 的个数 。 由 D v ie 提 出的“ 一 ai N s r d t 5 点算 法 ’基 , 本 思想是 两幅图像 之 间的运动 为纯平 移运动 时 , 给定 5对图像对应点 , 则可以线性确定本质矩 阵 , 与基 通过 础矩阵的转化 关 系 , 便可 以确 定基 础矩 阵。相 比“ 一 8
基于面积比矩阵的加权特征向量点匹配算法
407 , a a 103 G i ) n
Ab ta t Ara rt tx,a n w p it e it b t n d s r tr s gv n i e p p r hc s a n ain e u d r a i e sr c : e - a o mar i i e on— td s u o ec i o ,i i n t a e ,w ih i n i v r c n e f n S i r i p e h a l
trf m tn ae lh ,h ae aoe u w y h l s gnet prah( A a t i Sr m hsieo t r t rao .BsdO i teppresndot h ec sce evc r p c E )m c n aq o i it s r t ai i oa o h g ̄ ot a fi a i i h n rr n -
a r WE - R .T ea otm ehne h E satni ait n a c p n s sn e o ol t qin m tx ( AA M) h l rh nacst A’ n —o b i ,adcnm t i t udrnt n eeul i gi e i s e ly a ho t e yh o g
算法能实现仿射 变换下点集精确匹配 ; 采用的加权 特征 向量法改进 了 E A匹配 法, 具有更好 的抗噪性 能。实
验 表 明算 法 切 实 可 行 。
关键词 : 计算机视觉 ; 点匹配 ; 面积比矩 阵 ; 加权特征向量 法
中 图分 类号 :N 1 T 99 文献标识码 : A
A eg t d Ei e v c o i tM a c i g Al o ih W i h e g n e t r Po n t h n g rt m Ba e n Ar a r to M a rx s d o e . a i ti
一种基于圈基的谱匹配算法
d cm oio ( V eo p sin S D) w sp r r d t te m t cs h n h t ig ma i ad iia po ait t a e ome o h a i .T e ,te ma hn t x n nt l r bly f re c r i b i
YAN u, L ANG n ,W ANG P I Do g Kui
( col f lc oi n f m t nE g er g n u U i ri , e i 20 3 , h a S ho o et nc adI o a o ni ei ,A hi n esy H 30 9 C i ) E r s nr i n n v t n
Absr c A p c r lma c i g ag rt t a t: s e ta th n l o hm a e n c c e b ss wa o o e n t i a e . Ac o d n o i b s d o y l a i sprp s d i h s p p r c r i g t
中 图分 类 号 :P 9 .1 T 3 14 文献 标 志码 : A 文 章 编 号 :0 0 2 6 (0 2 0 - 0 1 0 10 — 12 2 1 )5 0 6 — 6
A p c r lm a c n l o ihm s d o y l ss s e ta t hi g a g r t ba e n c c e ba i
21 0 2年 9月 第3 6卷 第 5期
安徽 大学学报 ( 自然科学版)
Junl f n u U ie i N trl c neE io ) ora o hi n r t A v sy( a a Si c d i u e tn
匹配度度量矩阵-概述说明以及解释

匹配度度量矩阵-概述说明以及解释1.引言1.1 概述在信息检索、数据挖掘和机器学习等领域中,匹配度度量矩阵是一种重要的工具和方法。
它用于衡量一组对象或特征之间的相似性或相关性程度。
匹配度度量矩阵在模式识别、图像处理、推荐系统等领域中具有广泛的应用。
匹配度度量矩阵的基本思想是通过计算对象之间的相似性或相关性,将其表示为一个矩阵形式。
这个矩阵可以用来比较不同对象之间的差异程度或关联程度。
匹配度度量矩阵可以基于不同的度量方法和算法进行计算,如欧氏距离、余弦相似度、相关系数等。
通过匹配度度量矩阵,我们能够对对象之间的相似性进行量化,进而进行进一步的数据分析和处理。
例如,在推荐系统中,我们可以利用匹配度度量矩阵来比较用户与物品之间的匹配程度,从而为用户推荐最合适的物品。
在图像处理领域,匹配度度量矩阵可以用来比较不同图像之间的相似程度,从而实现图像相似性搜索和分类等应用。
匹配度度量矩阵的计算方法和应用取决于具体的领域和问题。
不同的度量方法和算法可能对应不同的应用场景和数据类型。
因此,在使用匹配度度量矩阵时,我们需要根据具体问题和需求选择合适的度量方法和算法。
本文将详细讨论匹配度度量矩阵的定义、计算方法及其在实际应用中的意义。
在结论部分,将总结匹配度度量矩阵的重要性,并展望其未来的发展。
通过本文的阐述,希望读者能够对匹配度度量矩阵有一个全面的了解,并能够在实际问题中应用和拓展其应用。
1.2文章结构文章结构部分(1.2)应该包括以下内容:文章的结构是组织和安排文章内容的方式,它对文章的逻辑性和条理性起着至关重要的作用。
一个良好的文章结构能够帮助读者更好地理解和吸收文章的内容。
本文将按照以下结构组织和呈现相关内容:1. 引言:在引言部分,将对匹配度度量矩阵的背景和重要性进行概述,引出文章的主题。
2. 正文:正文部分将详细介绍匹配度度量矩阵的定义、计算方法和在实际应用中的意义。
具体内容包括:2.1 匹配度度量矩阵的定义:本节将介绍匹配度度量矩阵的基本概念和定义,包括其在匹配度量中的作用和意义。
搜索引擎中的广告推荐算法研究

搜索引擎中的广告推荐算法研究搜索引擎是我们日常生活中用到最多的一种信息检索工具,通过搜索引擎我们可以快速地找到我们所需要的各种信息,也为商家提供了一种非常宝贵的广告推广渠道。
搜索引擎为了更好地进行广告推荐,需要使用各种各样的推荐算法。
本文将介绍搜索引擎中的广告推荐算法研究,包括推荐算法种类、推荐算法的计算方法和应用实例。
一、推荐算法种类搜索引擎的广告推荐算法种类包括以下几种:1. 基于内容的推荐算法基于内容的推荐算法是一种经典的推荐算法,该算法的基本思想是分析物品的内容和属性,根据用户的偏好和历史行为提出相似的物品推荐。
2. 基于协同过滤的推荐算法基于协同过滤的推荐算法是一种经典的推荐算法,该算法的基本思想是通过用户的行为数据来推荐物品,即根据不同用户的历史行为和偏好,推荐给其最合适的物品。
3. 基于标签的推荐算法基于标签的推荐算法是一种相对新兴的推荐算法,该算法的基本思想是将标签与物品进行关联,为每个物品打上标签,然后根据用户喜好的标签推荐物品。
4. 基于深度学习的推荐算法基于深度学习的推荐算法是一种较为新颖的推荐算法,该算法基于神经网络,通过分析用户和物品之间的关系,预测用户的喜好和评分,为用户推荐相关的物品。
二、推荐算法的计算方法推荐算法的计算方法是推荐算法的具体实现方式。
下面介绍几种常见的推荐算法计算方法。
1. 基于矩阵分解的推荐算法在基于协同过滤的推荐算法中,经常会使用矩阵分解来计算用户和物品之间的相关性。
矩阵分解能够将用户和物品的特征转换为低维向量,从而更好地进行相似性计算。
2. 基于向量空间模型的推荐算法向量空间模型是一种经典的信息检索技术,在推荐系统中也被广泛应用。
该模型通过将用户和物品表示为向量,计算两个向量之间的距离,从而判断它们的相关性。
3. 基于图像识别的推荐算法在基于内容的推荐算法中,我们需要对物品的特征进行提取和匹配。
图像识别技术能够识别物品图片的相关属性和元素,更好地对物品进行描述和匹配。
基础矩阵
基础矩阵及其求法同一三维场景在两个不同视点处得到的两幅二维图像之间的几何关系——极几何以及极几何的代数表示——基础矩阵。
两幅图像可以是由两个摄像机在不同位置同时采集的,也可以是同一摄像机顺序采集的,例如摄像机相对场景移动。
对于这两种情况,几何上认为是相等的。
一般地,同一世界坐标系下的同一物体的图像间存在一种几何上的对极约束关系。
在立体视觉中,可以利用图像点的匹配来恢复这种几何关系,反过来,也可以利用这种几何关系来约束匹配,使得对应点的搜索范围由二维平面降低到对应一维极线,使得匹配的鲁棒性、精度都得到很大提高。
对极几何关系在数学上可以用基础矩阵F 来表示,因此,对极几何问题就转化为对基础矩阵F 的估计问题。
精确地计算F 对于标定、寻找精确匹配和三维重建都有重要意义。
2.1 基础矩阵假设在一个立体视觉系统中,有两个摄像机,如图2.1所示,设C和C’分别为两个摄像机的光心,两个摄像机获得的图像分别为I和I’,M为三维空间中任意一点,m和m’是点M 在两个图像上的像点(投影点),称m和m’为一对对应点。
连接光心C和C’的直线称为基线。
空间点M和两个光心C和C’共面,设它们所在的平面为π,该面称为极平面。
极平面与图像平面的交线l和l’称为极线。
因为m(m’)也同时在平面π和像平面I(I’)上。
从这里可以看出,寻找m(m’)的对应点m(m’)时,不必在I(I’)整幅图像中寻找,只需在m(m’)在I(I’)的极线上寻找即可。
这就提供了一个重要的极线约束,将对应点的搜索空间从二维降到了一维。
当三维空间点M移动时,产生的对所有极线都穿过极点e(e’),极点是极线与图像平面的交点。
图2.1两幅图像间的对极几何2.1.1 参考坐标系为了描述基础矩阵,首先需要定义四个参考坐标系:图像坐标系、成像平面坐标系、摄像机坐标系和世界坐标系。
摄像机采集的数字图像在计算机内可以存储为数组,数组中的每一个元素(称为像素,pixel)的值即是图像点的亮度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.1研究背景和意义·······························································,··················......……1
Pointsinas一 PointalgorithnlfordeteetionofPolardistaneeminimum
PrineiPle, imProvetheaceuraeyrateofthes一 Pointalgorithm.
Keywords:fundamentalmatrix,5一 Pointalgorithlll, essentialmatrix
的地方外,论文中不包含其他人已经发表或撰写过的研究成果,也不
包含为获得中南大学或其他单位的学位或证书而使用过的材料。与我
共同工作的同志对本研究所作的贡献均已在论文中作了明确的说明。
作者签名:花J吞探日期:二口11年上月兰日
学位论文版权使用授权书
本人了解中南大学有关保留、使用学位论文的规定,即:学校
2.6基本矩阵估计···························································································……10
extraetionandthentoeachfeaturePointfeatureveetordescriPtor.
Algorltllmoftimehasbeenreducedontheonehand, andalgorithm
robustnesshasbeenimProving.Onthesolutionofthefundamental
2.2对极几何····································································································……7
2.3基本矩阵·····················,··············································································……8
在计算机视觉中的图形匹配中,恢复两幅图像之间像素点的对应
关系,一直是研究的重点。而从不同视点采集的两幅图像中的同一物
体空间点的对应之间存在着一定的约束关系,这就是极线几何约束关
系.基本矩阵就是这种几何约束关系的数学表达。基本矩阵包含了由
不同视点处得到的图像之间的重要的几何关系,描述了对应点之间应
1.3.1研究内容···················································································.·.·.....……5
L3.2论文章节安排·················································································...……5
有权保留学位论文并根据国家或湖南省有关部门规定送交学位论文,
允许学位论文被查阅和借阅;学校可以公布学位论文的全部或部分内
容,可以采用复印、缩印或其它手段保存学位论文。同时授权中国科
学技术信息研究所将本学位论文收录到《中国学位论文全文数据库》,
并通过网络向社会公众提供信息服务。
作者签名:花手标导师签名闰熟乞日期:~年上月、日摘要
1.2国内外研究的现状与水平········································································……2
1.3本文主要研究的内容和章节安排····························································……5
算法计算时间过长,而日。rris算法对噪声和图形旋转不适应,而结合
两者优点的日。rris一引FT算法能够结合两个的优点,即先建立尺度空间,
再用日arris算法进行特征点提取,然后再给每个特征点计算特征向量
描述子。这样一方面算法的时间得到了降低,而另一方面算法的鲁棒
性也得到了提高。
针对求解基本矩阵方面,利用5一点算法求解出本质矩阵,然后利
longtime, andHarrisalgorithmandgraphrotationnoisedoesnotfit,Put
forwardacombinationofadvantagesofthetwoHarris一 SIFTalgorithm,
that15, thefirstestablishascalesPaee, useHarrisalgorithmofFeature
corresPondingrelationshiPbetweentwoimagesPixel, hasbeenthefocus
ofthestudy.CollectedfromdifferentviewPointsofthetwosameobject
sPaceimagePointcorresPondeneebetweencertainconstraints, This15the
conductmorein一 dePthstudies, comParedtoallkindsofalgorithms,said
theiradvantagesanddisadvantages, andPutforwardanimProved
algoritllm.OnfeaturePointsextraetion, asSIFTalgorithmforealeulating
第二章两视点几何······················································································........……7
2.1图像坐标归一化·········································································..··...........……7
describedthecorresPondingPointsshouldmeettheePIPolarconstraint
conditions;containstwoeamerasorbetweenasinglemotionParameters
oftheeamera.Anaeeurateestimateofthefundarnentalmatrix15an
__才别.乍犷工巨._._.用tJ-分入〕‘界;_.______ MSTHESIS:
Baseonthefundamentalmatrixstudyof
matehingalgorithm
SPeciality:
MasterDegreeCandidate:
SUPerVISOF: AssoeiateProf.zhouChunvan
2.4纯平移运动下的基本矩阵············,···························································……9
2.5本质矩阵····································································································……9
用基本矩阵与本质矩阵的标定关系推导出基本矩阵,同时对5一点算法
中的所有解引入了反投影残差最小约束法,排除错误解,提高了5-
点算法的正确率。
关键词:基本矩阵,5一点算法,本质矩阵,特征点提取算法ABSTRACT
PatternMatchingincomPutervisionintheresumPtionofthe
featureextractionalgorithln目录
摘要·······················································································································……I
imPortanttaskineomPutervision.ThisArticleresPeetivelyoncomPuter
imageProeessingofimagematchinginvolvedintechnology, Feature
Pointdetectionteehnologyandsolutionoffundamentalmatrixofthree
满足的极线约束条件;包含了两台摄像机之间或者单个摄像机的运动
参数。准确估计基本矩阵是计算机视觉中的一个重要课题。
本文分别对计算机图像匹配中所涉及的图像预处理技术,特征点
检测技术以及求解基本矩阵三方面进行了较深入的研究,对各种算
法进行了比较,指出了他们的优缺点,进而提出了一种改进的算法。
针对特征点提取问题,分析了己有的特征点检测方法,其中slFT
SchoolofInformationScience&Engineering
CentralSouthUniversity
ChangshaHunanP.R.C原创·l生声明
本人声明,所呈交的学位论文是本人在导师指导下进行的研究