2013.10PID神经网络混沌优化及其在机械臂轨迹跟踪控制中的应用
基于神经网络的空间柔性机械臂PID快速学习控制

式中: AD = — △日 = 一 D . 日 詹
t eylan a d c mp n aeiv remo e ,po ot n itg ain df rnit n ( I i l e r n o e s t n es — d l rp r o ne rt iee t i v i o f a o P D)c nrl ra d RB e r o t l n F n u a oe l
Abtat F r h aet yt c igpo l fref ai p c o o wt eil maiuaos hsp p r — s c : o et jco a kn rbe o e— ot gsaerbt i f xbe np lt ,ti a e r t r r r m f l n hl r a
第3 8卷第 5期
2 1 年 5月 01
应
用
科
技
V 13 . o 5 o. 8 N .
Ma v201 1
App id Sce e a d Te hn lg le inc n c oo y
d i1 .9 9 ji n 10 6 1 .0 10 . 1 o:0 3 6/.s .0 9— 7 X 2 1 .5 O s
n t r r s d t u r n e tb l yo e s s m.E r rc s f n t n i f r d b I o t l r t x d c n ewok a e u e g a a t e sa i t f h y t o i t e ro o t u ci Sof e y P D c n r l h f e e . o e o e wi i
基 于神 经 网络 的 空 间柔 性 机 械 臂 PD快 速 学 习控 制 I
混沌优化方法在PID控制器中应用的研究进展

文 章 编 号 :6 2—4 4 ( 0 6 0 17 3 8 20 )4—0 0 —0 4 1 6
混 沌 优 化 方 法在 P D控 制器 中应 用 的研 究进 展 I
魏 剑 林 ,王 永 初
( 华侨 大 学机 电及 自动 化 学 院 ,福 建 泉 州 3 2 2 ) 60 1
摘 要 : 顾 了近 几 年 来 混 沌 优 化 方 法 及 其 在 PD控 制 器 的 参 数 调 整 方 面 应 用 的研 究 进 展 , 混 沌 优 回 I 对
制 器的 实际应 用 , 现 了很 多新 的方法 出
, 如线
性 二 次最 优 控 制 、 相位 裕 度 、 传 算 法 、 经 网 络 遗 神 等 , 是通过 这 么多 年来 的运用 发 现 , 但 他们 都存在
着 不 同程度 的不 足之 处 。有些 智能 PD控制 策 略 I 要求 对被 控对 象 有 全 面 的先 验 知识 , 或是 建立 在 优化 问题 具 有 连 续 可 导 的 光 滑 搜 索 空 间 的基 础 上 , 一些 复 杂系统 难 以建立 精确 的数 学模 型 , 对 或 者 搜 索空 间 不 可微 , 优控 制 就 难 以 实现 。此 外 寻 智 能 控制 还存 在收 敛速 度慢 或 自身参数 选取 困难
维普0 0 6年 8月
福建 工 程学 院学报
J u n lo uin Unv riy o e h oo5 o r a fF i iest fT c n lg a
Vo . 1 4 No. 4 Au g.2 0 06
化 方 法 的特 点 及 其在 解 决 函数 优 化 问题 和 组合 问题 上进 行 了说 明 。 通 过 混 沌 优 化 方 法 在 PD参 数 调 I
混沌神经网络系统的追踪控制
法 等 。通 常 。混沌 控 制 有 两种 目标 : 一 种是 追 第
踪 问题 , 第二 种是 镇定 问题 。 在 这些 混 沌 控 制 的研 究 中 , 踪 问 题 ( 追 即通 过
施 加控 制使 受 控 系 统 的输 出信 号 达 到 预 先 给 定 的
v a b d sn .e m ; va c @ ia o
( ) 有 l () =0, 收 敛规 律是 指数 的 。 4则 i e m 且 证明: 选取 Lauo yp nv函数 为
vt ( )= ( 2一r +( +r— ) l— ) 3 () 5
通信作 者简介 : 屈宝存 ( 9 3 ) 男 , 16 一 , 湖南新 宁人 , 授 , 教 研究 方
向: 微型计算机在生产过程中的应用 ; 现代控制理论研究与应用 。
V t =2 () ( 2一r ( 一 ) 2 )+2 +r 1 3 ( — 一 )
维普资讯
59 l4
科
学
技
术
与
工
程
8卷
( +r一 一 )= l 3
出信号。图 3为误差 e :t 一vt 的输 出信号。 ()= () ()
S22一S33一 3 3 2 时 。 ( )按 指数 规律 收敛 到 0 e£ 。
() 4
定 理 : 于控 制 系统 式 ( )若 控 制 器 满 足式 对 2 ,
20 年 6 1 08 月 2日收到
第一作者简介 : 王小 菽 ( 9 3 ) 女 , 18 一 , 辽宁抚 顺人 , 研究 生 , . al E m i :
的输 出信号 () :t 追踪事先 给定 的参考信号 rt (),
控制系统的模糊神经网络混沌滑模控制方法

控制系统的模糊神经网络混沌滑模控制方法控制系统的模糊神经网络混沌滑模控制方法是一种应用于复杂系统控制中的先进方法。
本文将从控制系统的基本原理、模糊神经网络、混沌滑模控制等方面进行论述,分析该方法在控制系统中的应用及优势。
一、控制系统的基本原理控制系统是指通过对系统内部及外部的各种控制因素进行调节和控制,以使系统状态达到预定的目标状态的一种技术方法。
控制系统主要由传感器、执行器和控制器组成。
传感器用于对系统的各种状态量进行测量,执行器用于通过执行力或输出信号对系统进行控制,而控制器则是通过比较测量值和目标值,并根据调节规则进行控制策略的决策。
二、模糊神经网络模糊神经网络是一种模拟人脑神经元工作原理的计算模型。
它具有模糊推理和学习能力,能够对复杂、不确定、模糊的问题进行处理和决策。
模糊神经网络由输入层、隐含层和输出层组成,通过训练学习得到网络的权值和阈值,从而实现对输入数据的模糊推理和处理。
三、混沌滑模控制混沌滑模控制是基于滑模控制理论和混沌控制理论的一种控制方法。
滑模控制是一种对系统进行非线性控制的方法,通过引入一个滑动模式面,使得系统在该面上运动,从而实现对系统状态的控制。
混沌控制是指通过对混沌系统的控制变量进行调节,使混沌系统的状态从混沌状态转化为稳定状态。
混沌滑模控制通过引入滑模控制和混沌控制的方法,对控制系统进行精确的控制,提高系统的控制品质。
四、控制系统的模糊神经网络混沌滑模控制方法基于以上的控制原理和理论,控制系统的模糊神经网络混沌滑模控制方法可以分为以下几个步骤:1. 系统建模和状态观测:首先对控制系统进行建模,确定系统的状态变量,并利用传感器对系统状态进行实时观测。
2. 模糊神经网络设计和训练:根据系统的控制需求,设计相应的模糊神经网络结构,并通过训练学习得到网络的权值和阈值。
3. 滑模控制面设计:根据系统的状态变量和目标状态,确定滑模控制面的设计方法和参数,使系统在该面上能够实现控制目标。
基于混沌pid参数寻优的伺服系统控制方法研究
基于混沌pid参数寻优的伺服系统控制方法研究本文旨在针对伺服系统对PID参数寻优方法进行研究,着重深入分析基于混沌系统的PID参数优化方法。
伺服系统是一种重要的现代控制系统,其关键的控制参数就是PID参数,也称为比例、积分和微分系数。
为了提高伺服系统的性能,必须对PID参数进行有效地优化和调整。
此外,传统的PID参数调整方法,如经验定律和Ziegler-Nichols等,存在着高风险、低精度和低鲁棒性的缺点。
为了克服这些缺点,许多研究人员提出了一些新的PID参数调整方法。
其中一种常见的方法就是基于混沌系统的PID参数优化方法。
混沌系统是一种具有复杂行为的系统,它能够以极其稳定的方式表现出强大的发展能力和抗噪声能力。
因此,混沌系统是PID参数优化的理想选择。
研究人员借助混沌系统本身的特性,发展了一系列基于混沌的PID参数优化方法,其中一种常见的方法是基于多智能体的混沌PID参数优化方法。
多智能体混沌PID参数优化是一种新型混沌PID参数优化方法,它采用多智能体动态搜索算法,模拟社会中的“吃豆人”行为,实现PID参数的优质估算和更新。
该算法结合了混沌理论的特性,使其具有高精度和较强的鲁棒性,能够有效地避免局部最优和收敛饱和现象,有效地优化伺服系统的PID参数。
在实际应用中,多智能体混沌PID参数优化方法可以有效地解决伺服系统参数优化问题,成功地提高了伺服系统在过程控制中的性能。
此外,该方法还可以用于手动和自动模式下的参数优化,能够实现有效的PID参数设计和调整。
本文通过系统性研究基于混沌系统的PID参数优化方法,说明基于多智能体混沌PID参数优化方法具有较高的精度和鲁棒性,能够有效地解决伺服系统PID参数优化问题。
未来,人们可以在这方面进一步深入研究,探索更佳的伺服系统控制方法。
综上所述,基于混沌PID参数优化的伺服系统控制方法具有较高的精度和鲁棒性,可有效解决伺服系统参数优化问题。
研究人员可以在这方面进行进一步的深入研究,以探索更佳的伺服系统控制方法。
基于神经网络PID的机械臂末端力位置混合控制系统
0 引言随着机械臂操作任务的性能要求不断提高,给机械臂于环境交互的相互作用力提出了更高的要求。
目前主流的力/位置混合控制方法主要基于Mason 于1979年最早提出针对机器人同时控制力和位置的概念以及关节柔顺的思想,在Mason 的基础上Raibert 和Craig 提出了力/位置混合控制,为机械臂的接触问题提出了良好的解决方案,首先分解机械臂的工作任务,将机械臂在作业中的约束分为自然约束和人为约束,力控制空间与位置控制空间为互补子空间。
力/位置混合控制算法的一大优点就是可以保证加速度的期望值被快速有效的调节[3]。
随着智能控制的发展,神经网络渐渐运用到机械臂力/位置中,主要应用方法如:蔡建羡的混合H2/H 神经网络控制算法很好的解决了外界环境的干扰,以及机械臂模型参数的不确定性情况[4];鲁棒控制算法在机械臂力/位置混合控制的运用;多层BP 神经网络控制策略应用于机械臂的力控制,并应用机械臂进行插孔作业验证算法。
本文提出智能控制算法在于弥补PID 控制精度的问题,智能控制算法应用于机械臂的力控,运用神经网络对非线性良好的非线性逼近特性和自适应,自学习能力提高机械臂力控的静度,调节速度和鲁棒性。
1 机械臂动力学模型建立机械臂动力学模型常用的方法为牛顿-欧拉法和拉格朗日方程,本文使用更为普遍的拉格朗日方程来建立机械臂的动力学模型,在忽略机械臂自身摩擦力和外界环境干扰的情况下,可建立机械臂动力学模型如下:Abstract:When the end effector of the manipulator contacts with the working environment, higher requirements are put forward for the force control accuracy of the manipulator. In the face of the uncertainty and change of working environment, the traditional PID (proportion integral differential) control has the characteristics of low precision and slow position adjustment speed. An intelligent control strategy combining neural network and PID control is proposed to improve the precision of force control, speed regulation and anti-interference. The dynamic model of a two link manipulator with universal research significance is established by using Lagrange method, and the Cartesian force acting on the end of the manipulator is mapped into the equivalent joint torque through Jacobian matrix. The traditional PID control is used for the position control of the manipulator to meet the dynamic speed regulation, and the neural network PID intelligent control is adopted for the force control strategy of the manipulator end. The simulation results of MATLAB show that the robot arm with neural network PID control algorithm has good track tracking and force tracking effect, which provides a certain reference for the research of intelligent control of human-machine interaction of manipulator.Keywords :Mechanical arm force control; neural network; MATLAB基金项目:智能制造福建省高校应用技术工程中心项目(2020-ZNZZ-02)。
机械臂轨迹跟踪控制--基于EC-RBF神经网络的机械臂模型参考自适应控制
(5)
2.3
神经网络模型参考自适应控制
对于机器臂控制系统, 神经网络控制器主要用于针
对系统的非线性和不确定性进行补偿。神经网络控制 与模型参考自适应控制相结合, 在很大程度上克服了 由于机械臂模型未知而带来的控制精度不准确的问题。 图 1 为基于神经网络的机械臂模型参考自适应控制的 结构框图。
参考模型
用, 人类社会的发展越来越依赖于机器人技术, 因此对 机器人控制技术也提出了更高的要求。如何实现机器 人在大范围、 高速度、 高精度要求下的运动轨迹控制, 是 机器人控制技术研究领域所面临的新问题。长期以来, 针对这一问题国内外学者们提出了许多控制方法
[1-5]
。近
基金项目: 甘肃省青年科技基金计划项目 (No.1308RJYA044) ; 兰州交通大学青年科学基金项目 (No.2013039) 。 作者简介: 杨剑锋 (1981—) , 男, 博士, 副教授, 研究方向为先进控制理论与方法; 张翠 (1989—) , 女, 硕士研究生, 研究方向为智能 机器人与神经网络; 张峰 (1986—) , 男, 硕士研究生, 研究方向为机器人技术研究与应用。E-mail: jfyang@ 收稿日期: 2013-06-26 修回日期: 2013-08-26 文章编号: 1002-8331 (2015) 09-0082-05 CNKI 网络优先出版: 2013-10-18, /kcms/detail/11.2127.TP.20131018.1529.004.html
82
2015, 51 (9)
Computer Engineering and Applications 计算机工程与应用
机械臂轨迹跟踪控制
——基于 EC-RBF 神经网络的机械臂模型参考自适应控制
基于混沌粒子群优化算法的空间机械臂轨迹规划算法
基于混沌粒子群优化算法的空间机械臂轨迹规划算法夏红伟;翟彦斌;马广程;邓雅;王常虹【摘要】A path planning algorithm of free-floating space manipulator is studied in order to obtain minimum disturbance of base attitude caused by manipulator’s movement. The manipulator joints are parameterized by sine function, and the object of base attitude disturbance minimum is given within the limit of joints angular velocity, angular acceleration and base attitude range. After introducing the chaos particle swarm optimization(CPSO) algorithm as the problem solving strategy, the problem’s solving steps are given. Numerical example results show that under the condition of system constraint, the mechanical arm joints change smoothly without angular velocity mutation, and have faster convergence speed than the standard particle swarm optimization(PSO) algorithm. The simulation results obtained under the optimal trajectory show that the base attitude disturbance is 1.3708°(triaxial synthesis) at termination time, which is reduced by more than 84%than the trapezoidal planning attitude disturbance(8.5459°), and this reveals that the proposed algorithm can effectively reduce the base attitude disturbance caused by manipulator’s movement.%针对自由漂浮状态下的空间机械臂系统,研究了基座姿态扰动最小的轨迹规划问题。
混沌系统控制与优化研究

混沌系统控制与优化研究混沌系统(Chaotic System)是指具有非线性动力学行为,表现出高度复杂和不可预测性质的系统。
它在物理、生物、经济等各个领域中具有广泛的应用和研究价值。
混沌系统的控制与优化研究是一门专业性强的学科,本文将按类划分章节,详细介绍混沌系统控制与优化的相关内容。
一、混沌系统基础知识1.混沌系统定义和特点:介绍混沌系统的基本概念和主要特征,包括非线性、敏感依赖初值、周期倍增和拓扑混沌等。
2.混沌系统产生机制:探讨混沌系统的产生机制,如Logistic映射、Lorenz方程等,解释混沌现象的动力学原理。
3.混沌系统的分析方法:介绍混沌系统的常用分析方法,如Poincaré截面、相空间重构和Lyapunov指数等,用于描述混沌系统的特性。
二、混沌系统控制方法1.传统控制方法:介绍传统控制方法在混沌系统中的应用,如PID控制、模糊控制和自适应控制等,分析其优势和不足。
2.混沌控制方法:探讨专门针对混沌系统开发的控制方法,如辨识控制、反馈控制和混沌同步等,详细介绍其原理和实现步骤。
3.基于优化算法的混沌系统控制:介绍将传统优化算法应用于混沌系统控制的方法,如遗传算法、粒子群优化和模拟退火等,讨论其优化效果和适用性。
三、混沌系统优化方法1.目标函数的优化:讨论混沌系统中目标函数的定义和优化方法,如最小二乘法、最大似然估计和极大似然估计等,分析其应用场景和效果。
2.参数优化:介绍针对混沌系统中参数的优化方法,如精确搜索、约束优化和粒子群算法等,详细解释其原理和应用步骤。
3.优化算法在混沌系统中的应用:探讨将优化算法应用于混沌系统建模和参数优化的实例,如混沌序列预测和混沌电路设计等,分析其优势和限制。
四、混沌系统控制与优化应用1.物理领域:介绍混沌系统控制与优化在物理领域中的应用,如混沌电路设计、自然气体控制和非线性振动系统控制等,分析其研究意义和实际应用效果。
2.生物领域:探讨混沌系统控制与优化在生物领域中的应用,如生物振荡器调控、神经网络模拟和生物多样性保护等,讨论其潜在贡献和技术挑战。
第八章 PID神经元网络及其控制系统
PID神经元网络及其控制系统舒怀林国防工业出版社第一章:绪论1.1 传统控制系统的局限性:由于被控对象的复杂性、大规模和确定性、分布性,要实现自动控制,那么基于传统精确数学模型的控制理论就显现出极大的局限性。
对于控制任务或者控制目标,以往都着眼于用数学语言进行描述,这种描述经常是不精确,实际上,控制任务和目标有多重性(多目标)和时变性,一个复杂任务的确定,需要多次反复,而且还包括任务所含信息的处理过程,也即任务集合处理。
迄今为止,还不存在一种直接使用工程技术用语言描述系统和解决问题的方法。
从工程技术语言到数学描述的影射过程中,一方面虽使问题作了很多简化,但另一方面却使用原问题丢失很多信息。
传统的控制理论虽然也有办法对付控制对象的不确定性和复杂性,如自适应控制和鲁棒控制也可以克服系统中所包含的不确定性,达到优化控制的目的。
但是自适应控制是以自动调节控制器的参数,使控制器与被控对象和环境达到良好的“匹配”,以削弱不确定性的影响为目标的。
从本质上说,自适应和自校正控制都是通过对系统某些重要参数的估计,以补偿的方法;来克服系统参数在一定范围内的慢变化情况。
鲁棒控制则是在一定的外部干扰和内部参数变化作用下,以提高系统的灵敏度为宗旨来抵御不确定性的。
根据这一思想和原则所导出的算法,其鲁棒的区域是很有限的。
1.2 人工神经网络控制的系统的特点和弱点:智能控制的概念和原理主要是针对被控对象、环境、控制目标或任务的复杂性而提出来的。
神经元网络是智能控制的一个主要分支,神经网络是以大脑生理研究成果为基础,模拟大脑的某些生理与机制,由人工建立的以有向图为拓扑结构的网络,它通过对连续或断续的输入做状态响应而进行信息处理;在ANN实际应用的同时,有关系统的稳定性、能控性、能观性等理论问题,有关ANN控制系统系统化设计方法问题,ANN的拓扑结构问题,以及ANN与基于规则的系统有机结合问题,还有待于进一步研究和发展,一般神经网络的弱点,制约了其在控制系统中的广泛应用,包括以下问题:⑴一般神经元网络的学习和训练时间很长,这是大多数控制系统所不能接受的。
RBF神经网络结合PID控制系统优化方案及应用实现
其次,通过数据信息采样,计算出输入信号 rin(p)和输出 数据 v(p),根据公式(3)计算出 u(p),最后得到神经网络的输 入参数。
在 PID 控制系统运行过程中利用 RBF 神经网络对网络参数 进行优化,并利用相关算法得到控制系统的各项权重,并经入到 第二个周期的控制中。
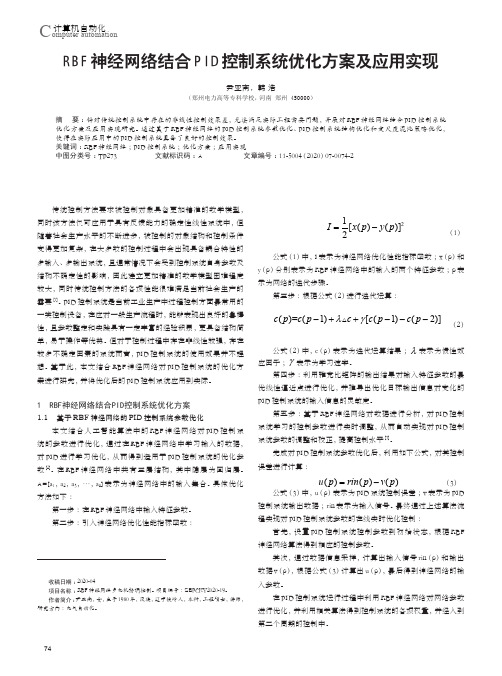
结合 RBF 神经网络改变原有 PID 控制系统的变尺度混沌策 略,首先改变系统初始化参数与初始追的选择策略,假设 p=0 表示为混沌变量的迭代标志,B1 为粗略搜索的次数,B2 为细致 搜 索 的 次 数,M=(p1,p2,p3,…,pn,g1,g2,g3,…,gm)表 示 为 PID 控制系统的所有控制参数集合,因此此时混沌变量的最优 值变为 M=(p1*,p2*,p3*…,pn*,g1*,g2*,g3*,…,gm*),则当前最 优目标函数的输出值应为集合中最大的数。假设在 [0,1] 区间当 中的任意 14 个相异的初值为混沌变量,则各个初始值当中选择
=I 1 [x( p) − y( p)]2
2
( 1)
公式(1)中,I 表示为神经网络优化性能指标函数 ;x(p)和 y(p)分别表示为 RBF 神经网络中的输入的两个特征参数 ;p 表 示为网络的迭代步骤。
第三步 :根据公式(2)进行迭代运算 :
c( p)=c( p −1) + λc + γ [c( p −1) − c( p − 2)] ( 2)
改进型变尺度 混沌优化策略
性能指标
-
+
PID1
DRNNI
-
+
被控制对象
图 1 优化后 PID 控制系统结构示意图
混沌神经网络的同步控制及其应用的开题报告
混沌神经网络的同步控制及其应用的开题报告一、研究背景混沌神经网络是一种新型的神经网络模型,其具有灵活性、非线性和异步性等特点,被广泛应用于模式识别、控制、优化等领域。
然而,混沌神经网络中的同步控制问题一直是该领域的热门研究课题之一。
同步控制是指将多个混沌神经网络的状态调整至一致状态的过程,这对于学术研究和实际应用都具有重要意义。
二、研究内容本研究旨在探究混沌神经网络的同步控制技术及其应用,具体研究内容包括:1. 混沌神经网络的基本理论与模型对混沌神经网络的基本理论和模型进行研究,深入了解其特点和优势,为深入探究同步控制技术奠定基础。
2. 混沌神经网络同步控制的研究现状对国内外混沌神经网络同步控制的研究现状进行全面分析,了解各种同步控制技术的特点和应用范围。
3. 混沌神经网络同步控制算法的设计与实现根据混沌神经网络同步控制的特点和需求,设计出一种高效稳定的同步控制算法,并进行实现和测试,验证其有效性和优势。
4. 混沌神经网络同步控制在数据加密中的应用将混沌神经网络同步控制技术应用于数据加密领域,探究其在数据安全性和可靠性方面的优势。
三、研究意义通过对混沌神经网络同步控制技术的研究,可以为提高混沌神经网络在模式识别、控制等领域中的应用效果提供技术支撑和理论基础。
同时,将同步控制技术应用于数据加密领域,可以提高数据的安全性和可靠性,具有重要的实际应用意义。
四、研究方法本研究将采用文献调研、理论分析和实验模拟等方法进行。
首先通过文献调研,了解混沌神经网络同步控制技术的发展现状和研究进展;其次,通过理论分析,深入探究混沌神经网络同步控制算法的特点和机理;最后,通过实验模拟,验证混沌神经网络同步控制技术的有效性和优势。
五、预期结果本研究的预期结果包括:1. 对混沌神经网络的特点和优势进行深入了解,为同步控制技术的研究提供理论基础。
2. 建立一种高效稳定的混沌神经网络同步控制算法,为混沌神经网络的应用提供技术支撑。
混合混沌法在机器人操作臂路径寻优中的应用
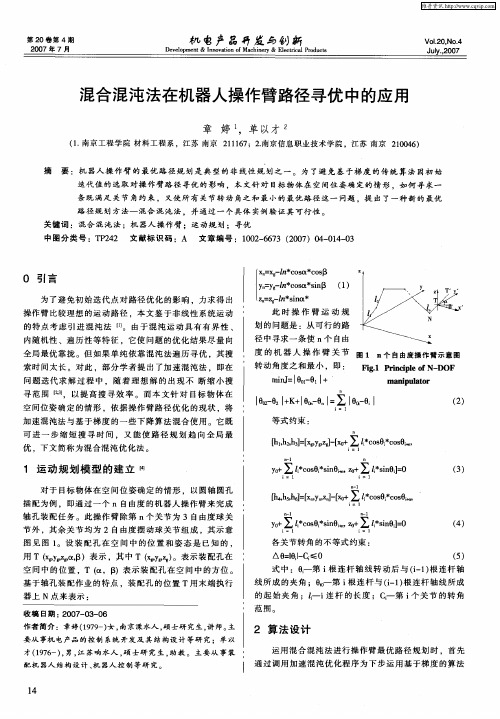
y ∑l oin 0 i s s0 + * O i c *
i= l
i= 1
∑li 0 in] *0 s =
() 4
各 关节转 角 的不等 式约束 :
A 0 0ICi O =1i ≤ -
用 T ( , )表 示 ,其 中 T ( , z) yz p x y 。表示装 配 孔在 s
0 引言
为 了避 免初 始 迭代 点 对路 径优 化 的影 响 ,力求 得 出
操 作臂 比较 理想 的运动 路 径 ,本文 鉴 于非 线性 系 统运 动 的特 点考 虑 引 进混 沌 法 【。 由于混 沌 运 动 具有 有 界性 、 ”
fnx l术o c s Xm g n c s 术 o1 - 3 {ny / oa s 1 ( ) y= g n cs *i3 - n 1
( n Z- n sn t Z= s l i o -
此 时 操 作 臂 运 动 规
划 的问题是 :从 可行 的路
径 中寻求 一条 使 n个 自由 度 的 机 器 人 操 作 臂 关 节 图 1 n个 自由度操 作臂示 意 图 转动 角度 之和 最小 ,即 :
F g 1 r n i l fN- i . P i cp e o DOF m a i ua o n p lt r
路 径 规 划 方 法 一 混 合 混 沌 法 ,并 通 过 一 个 具 体 实例 验 证 其 可 行 性 。
关键词 :混 合混 沌 法 ;机 器人 操作 臂 :运动 规划 :寻优 中 图分 类 号 :T 2 2 文献标 识 码 :A 文章 编号 :1 0 — 6 3 (0 7 4 0 4 0 P 4 0 2 6 7 2 0 )0 — 1 — 3
基于混沌优化的模糊神经网络在交流调速控制中的应用
r s o s f p e e u ai n s se e p n e o s e d r g lt y tm.S mu a in a d e p r n a e u t s o a e c n r l t o AC o i l t n x e me tl s l h w t t o t h d o i r s h t h o me a p id t p e e l t n s se h s n i r t n,h g e r cso p l o AC s e d r g a i y tm a o vb a i e u o o ih r p e iin,s o g r b sn s n n i  ̄ n o u t e s a d a t —
0 引言
交流调速系统 由交流电动机组成 , 其数学模型具有强耦合、 参数时变、 非线性的特点 , 采用传统的基 于对象 模型 的 PD控制 方 法 已经很 难取 得理 想 的控 制效 果 , 就 系统 控 制 带来 了一 定 的难 度 。模 糊 控 I 这
制 与神 经 网络 控制 都不依 赖 于控 制对 象 和精确 的数 学模 型 , 一种 非线 性控 制方 法 , 有 良好 的控 制效 是 具 果 。近 年来人们 将模 糊控 制 与神 经 网络控 制结 合起 来 , 利用 模糊 模 型将 经验 知识 转化 到神 经 网络 中 , 构 成 模糊 神经 网络控制 器并 应用 于 交 流调速 系统 。但 模糊 控制 规 则 的设计 和 神经 网络 的权值 往往 难 以确 定 , 响系统 的控制 效 果 , 以系统参 数 的优化 问题 便 成为控 制 的关 键 问题 。在模 糊神 经 网络控 制 技术 影 所 中常 用 的是 B P算法 , 由于 B P算法 是基 于梯 度 的方 法 , 在计 算 量 大 、 习周期 长 、 存 学 收敛 速 度 慢 和 易 陷 人局部极小值等缺陷。采用遗传算法优化模糊神经网络 , 能取得一定 的控制效果。然 而遗传算法也存 在 收敛 速度较 慢 、 法 自身参 数 选 取 困难 、 出现 “ 熟 ” 问题 , 算 易 早 等 因此 , 要 寻求 一 种 高 效 优质 的优 化 需
基于混沌神经网络的雷达协同信息共享分发路径优化方法
基于混沌神经网络的雷达协同信息共享分发路径优化方法摘要:随着雷达技术的不断发展,协同信息共享在雷达系统中扮演着重要的角色。
然而,如何优化雷达协同信息的分发路径成为一个挑战。
本文提出了一种基于混沌神经网络的分发路径优化方法,通过利用混沌神经网络模型提取路径优化特征,将其应用于雷达协同信息分发系统,实现目标路径的优化。
引言:在现代雷达系统中,协同信息共享分发起着至关重要的作用。
通过协同信息共享,不仅可以提高雷达系统的监测性能,还可以提升对目标的定位和跟踪能力。
而分发路径的优化是协同信息共享的基础和关键。
本文将基于混沌神经网络的方法应用于雷达协同信息的分发路径优化,实现信息传输的高效性和实时性。
一、混沌神经网络模型混沌神经网络是模拟混沌系统的动力学特性和大脑神经网络的学习和记忆能力,结合而形成的一种新型神经网络模型。
混沌神经网络能够自适应地调整权值和阈值,并具有自学习、自适应和自组织能力。
在雷达协同信息共享分发中,我们利用混沌神经网络模型来提取路径优化特征,从而实现分发路径的优化。
二、雷达协同信息共享分发路径优化方法1. 数据预处理在进行雷达协同信息共享分发之前,首先需要对原始数据进行预处理。
预处理的主要目的是降低数据的冗余性和噪声干扰,提高数据的可靠性和准确性。
预处理过程包括数据过滤、数据归一化和特征提取等步骤。
2. 混沌神经网络模型建立将预处理后的数据输入混沌神经网络模型进行训练和学习。
混沌神经网络模型会根据输入数据的特征自适应地调整权值和阈值。
通过反复迭代,模型能够获得一组最优权值和阈值,实现对路径优化特征的提取。
3. 分发路径优化利用训练好的混沌神经网络模型进行路径优化。
输入目标路径的特征向量,通过混沌神经网络的计算,可以得到一个具有最小代价的路径。
该路径即为分发路径的优化方案。
优化的目标包括最小化传输延迟、最大化分发效率和最小化能量消耗等。
三、实验结果与分析为了验证所提出的基于混沌神经网络的雷达协同信息共享分发路径优化方法的有效性,我们进行了一系列实验。
改进神经网络自适应滑模控制的机器人轨迹跟踪控制
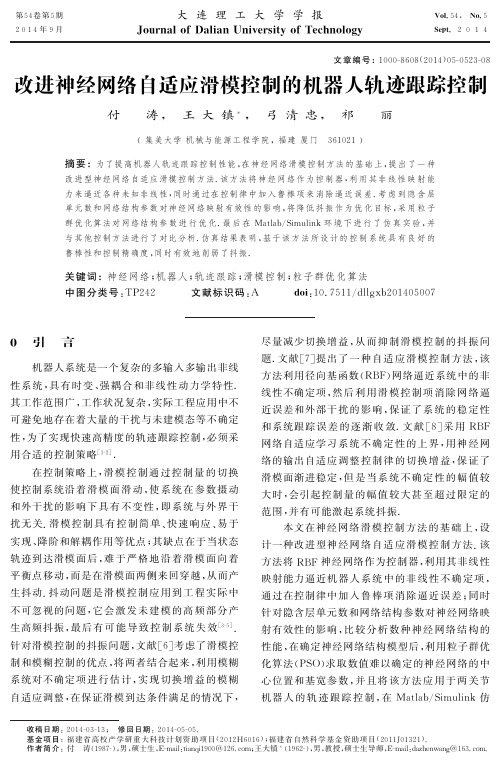
第54卷第5期2014年9月大连理工大学学报J o u r n a l o fD a l i a nU n i v e r s i t y o f T e c h n o l o g yV o l .54,N o .5S e pt .2014文章编号:1000-8608(2014)05-0523-08改进神经网络自适应滑模控制的机器人轨迹跟踪控制付 涛, 王大镇*, 弓清忠, 祁 丽(集美大学机械与能源工程学院,福建厦门 361021)摘要:为了提高机器人轨迹跟踪控制性能,在神经网络滑模控制方法的基础上,提出了一种改进型神经网络自适应滑模控制方法.该方法将神经网络作为控制器,利用其非线性映射能力来逼近各种未知非线性,同时通过在控制律中加入鲁棒项来消除逼近误差.考虑到隐含层单元数和网络结构参数对神经网络映射有效性的影响,将降低抖振作为优化目标,采用粒子群优化算法对网络结构参数进行优化.最后在M a t l a b /S i m u l i n k 环境下进行了仿真实验,并与其他控制方法进行了对比分析.仿真结果表明,基于该方法所设计的控制系统具有良好的鲁棒性和控制精确度,同时有效地削弱了抖振.关键词:神经网络;机器人;轨迹跟踪;滑模控制;粒子群优化算法中图分类号:T P 242文献标识码:Ad o i :10.7511/d l l gx b 201405007收稿日期:2014-03-13; 修回日期:2014-05-05.基金项目:福建省高校产学研重大科技计划资助项目(2012H 6016);福建省自然科学基金资助项目(2011J 01321).作者简介:付涛(1987-),男,硕士生,E -m a i l :t i a n q i 1900@126.c o m ;王大镇*(1962-),男,教授,硕士生导师,E -m a i l :d a z h e n w a n g@163.c o m .0 引 言机器人系统是一个复杂的多输入多输出非线性系统,具有时变㊁强耦合和非线性动力学特性.其工作范围广,工作状况复杂,实际工程应用中不可避免地存在着大量的干扰与未建模态等不确定性,为了实现快速高精度的轨迹跟踪控制,必须采用合适的控制策略[1-2].在控制策略上,滑模控制通过控制量的切换使控制系统沿着滑模面滑动,使系统在参数摄动和外干扰的影响下具有不变性,即系统与外界干扰无关.滑模控制具有控制简单㊁快速响应㊁易于实现㊁降阶和解耦作用等优点;其缺点在于当状态轨迹到达滑模面后,难于严格地沿着滑模面向着平衡点移动,而是在滑模面两侧来回穿越,从而产生抖动.抖动问题是滑模控制应用到工程实际中不可忽视的问题,它会激发未建模的高频部分产生高频抖振,最后有可能导致控制系统失效[3-5].针对滑模控制的抖振问题,文献[6]考虑了滑模控制和模糊控制的优点,将两者结合起来,利用模糊系统对不确定项进行估计,实现切换增益的模糊自适应调整,在保证滑模到达条件满足的情况下,尽量减少切换增益,从而抑制滑模控制的抖振问题.文献[7]提出了一种自适应滑模控制方法,该方法利用径向基函数(R B F )网络逼近系统中的非线性不确定项,然后利用滑模控制项消除网络逼近误差和外部干扰的影响,保证了系统的稳定性和系统跟踪误差的逐渐收敛.文献[8]采用R B F 网络自适应学习系统不确定性的上界,用神经网络的输出自适应调整控制律的切换增益,保证了滑模面渐进稳定,但是当系统不确定性的幅值较大时,会引起控制量的幅值较大甚至超过限定的范围,并有可能激起系统抖振.本文在神经网络滑模控制方法的基础上,设计一种改进型神经网络自适应滑模控制方法.该方法将R B F 神经网络作为控制器,利用其非线性映射能力逼近机器人系统中的非线性不确定项,通过在控制律中加入鲁棒项消除逼近误差;同时针对隐含层单元数和网络结构参数对神经网络映射有效性的影响,比较分析数种神经网络结构的性能,在确定神经网络结构模型后,利用粒子群优化算法(P S O )求取数值难以确定的神经网络的中心位置和基宽参数,并且将该方法应用于两关节机器人的轨迹跟踪控制,在M a t l a b /S i m u l i n k 仿真环境中,比较一般扰动和大范围扰动两种情况下,不同滑模控制方法的控制效果.1 机器人动力学模型对于n 关节的机器人,若考虑摩擦力㊁未建模态和外加扰动的影响,利用拉格朗日方法,可以求出其动力学方程为[9]M (q )q㊃㊃+C (q ,q㊃)q㊃+G (q )+F (q㊃)+τd =τ(1)式中:q ɪR n 为关节角位移量,q ㊃和q ㊃㊃分别为速度矢量和加速度矢量,M (q )为机器人的惯性矩阵,C (q ,q㊃)为机器人的离心力和哥氏力矩阵,G (q )为作用在关节上的重力矢量,F (q㊃)为摩擦力构成的矩阵,τd 为建模误差㊁参数变化和外加扰动等不确定因素构成的矩阵,τ为控制力矩构成的矩阵.本文选取两关节机器人作为研究对象,其关节结构如图1所示.图1 两关节机器人结构F i g .1 S t r u c t u r e o f t w o jo i n t r o b o t 式(1)中: M (q )=h 11h 12h 21h 22æèçöø÷,τ=τ1τ2æèçöø÷ τd =τd 1τd 2æèçöø÷,q =q 1q 2æèçöø÷ h 11=(m 1+m 2)l 21+m 2l 22+2m 2l 1l 2c o s q2+J 1 h 12=h 21=m 2l 22+m 2l 1l 2c o s q 2 h 22=m 2l 22+J 2C (q )=c 11c 12c 21c 22æèçöø÷,G (q )=G 1G 2æèçöø÷ F (q㊃)=F 1F 2æèçöø÷=10q ㊃1+3s g n (q㊃1)10q㊃2+3s g n (q㊃2)æèççöø÷÷ c 11=-m 2l 1l 2s i n q 2q㊃2c 12=-m 2l 1l 2s i n q 2(q㊃1+q㊃2) c 21=m 2l 1l 2s i n q 2q㊃1c 22=0 G 1=(m 1+m 2)g l 1c o s q 1+m 2g l 2c o s (q 1+q 2) G 2=m 2g l 2c o s (q 1+q2)其中q 1和q2分别为杆1和杆2的角位移;m 1和m 2分别为杆1和杆2的质量,且以连杆末端的点质量表示;l 1和l 2分别为杆1和杆2的长度;g 为重力加速度.2 改进型R B F 神经网络自适应滑模控制2.1 滑模变结构控制机器人轨迹跟踪的控制目标是使实际轨迹q 能够更好地跟踪期望轨迹q d .定义跟踪误差为e =q d -q ,e㊃=q㊃d -q ㊃(2)滑模函数定义为r =e㊃+Λe (3)式中:q d =(q d 1 qd 2)T ;Λ=ΛT>0,Λ=d i a g{λ1,λ2}为正的对角矩阵,λ1,λ2>0,则有Mr㊃=M (q㊃㊃d -q㊃㊃+Λe㊃)=M (q㊃㊃d +Λe㊃)-M q㊃㊃=M (q㊃㊃d +Λe ㊃)+C q㊃+G +F +τd -τ=M (q㊃㊃d +Λe㊃)-C r +C (q㊃d +Λe )+G +F +τd -τ=-C r -τ+f +τd(4)式中:q㊃=q㊃d -e㊃=q㊃d -r +Λe f =M (q㊃d +Λe㊃)+C (qd +Λe )+G +F 根据式(3),可以设计满足达到条件并保证滑模存在的变结构控制器,控制系统稳定性条件需要满足李雅普诺夫稳定性要求.2.2 R B F 神经网络自适应滑模控制器在工程应用中,模型不确定项f 为未知,因此需要对不确定项f 进行逼近.而R B F 神经网络的基本思想是用径向基函数作为隐含层神经元的基来构成隐含层空间,隐含层对输入矢量进行变换,将低维模式输入数据变换到高维空间内,使得在低维空间内线性不可分问题在高维空间内线性可分.R B F 神经网络结构简单,训练简洁而且收敛速度快,能够逼近任意非线性函数[10].因此采用R B F 神经网络对不确定项f 进行逼近,取x =(e T e ㊃T qT d q ㊃T d q ㊃㊃T d )为网络输入,隶属函数取为高斯函数,其R B F 神经网络的网络算法为h i j =e x p (-x i -c i j 2/b 2i j )(5)fi =w Ti h i +εi (6)式中:i =1,2, ,n ,n 为关节数;x i =(e Ti425大连理工大学学报第54卷e㊃T i qd i T q㊃T d i q㊃㊃Td i )为第i 个关节的神经网络输入;j =1,2, ,m ,m 为隐含层神经元个数;h i =(h i 1 h i 2 h i m )T为径向基向量;c i 和b i 为高斯函数的中心位置和基宽参数,εi 为第i 个关节的神经网络逼近误差.根据f i 的表达式,采用R B F 神经网络对不确定项f 进行逼近后的网络输出f ^为f ^(x )=(f ^1 f ^2 f ^n )T =w T1h 1+ε1w T 2h 2+ε2︙w T n h n +εn æèççççöø÷÷÷÷=w T1h 1w T 2h 2︙w T n h n æèççççöø÷÷÷÷+ε=W ^T h (x )+ε(7)式中:ε=(ε1 ε2 εn )T .取W =W -W ^,设计控制律为τ=W ^T h (x )+K vr -v (8)取神经网络的自适应律为W ^㊃=F h r T(9)式中:v 为克服神经网络逼近误差的鲁棒项,其设置是为了增强控制的鲁棒性.将式(8)代入式(4)得Mr㊃=-(K v +C )+W Th (x )+(ε+τd )+v (10)2.3 稳定性证明对R B F 神经网络自适应滑模控制的稳定性进行证明时,考虑神经网络存在建模误差τd 和函数逼近误差ε的情况,其中εɤεN ,τd ɤb d ,将鲁棒项v 设计为v =-(εN +b d )s g n (r ),定义李雅普诺夫函数为L =12r T M r +12t r (W T F -1W )(11)取神经网络的控制律和自适应律为式(8)和式(9),则有L㊃=r TMr㊃+12r T M㊃r +t r (W T F -1W㊃)(12)将式(10)代入式(12)得L㊃=-r T K v r㊃+r T(ε+τd +v )(13)由于r T (ε+τd +v )=r T (ε+τd )+r Tv =r T(ε+τd )-r (εN +b d )ɤ0(14)所以L㊃ɤ0.由李雅普诺夫稳定性判别定理可知,当r ʂ0时,L㊃(r )<0;当r =0时,L㊃(r )=0.L㊃(r )是负定的,其在原点处渐进稳定.又由于L㊃ɤ0,由李雅普诺夫稳定性理论知r ㊁e 一致有界,由r =e ㊃+Λe 知e㊃一致有界,利用B a b a l a t 定理知t ңɕ时,L㊃=0,即r ң0,于是有e ң0和e㊃ң0,可知系统是稳定的.2.4 粒子群算法优化网络结构参数粒子群算法是基于动物群体觅食和人类决策行为而提出的一种启发式全局优化算法.在该算法中,粒子通过个体极值P t 和群体极值G t 更新自身的速度v 和位置X ,其进化方程可描述为[11]v t +1=w v t +c 1r 1(P t -X t )+c 2r 2(P t -G t )(15)X t +1=X t +v t +1(16)式中:w 为惯性权重,c 1㊁c 2为速度更新参数,r 1㊁r 2为[0,1]的随机数.为了更好地平衡算法的全局搜索与局部搜索能力,w 可以采用线性递减惯性权值:w =w s t a r t -t (w s t a r t -w e n d )T(17)式中:w s t a r t ㊁w e n d 表示初始惯性权重和迭代到最大次数时的惯性权重,t 为当前迭代次数,T 为最大迭代次数.一般的,采用R B F 神经网络进行非线性逼近时,中心位置c 和基宽参数b 的选取对神经网络的性能影响较大.如果参数取值不合适,将使高斯基函数无法得到有效映射,从而导致R B F 神经网络无效.因此,本文采用粒子群算法对中心位置c 和基宽参数b的选取进行优化,其中c 中各个值的变量寻优范围为(-3,3),b 的范围为(0,15),适应度函数定义为实际输出和网络输出的相对误差,其表达式为E =ðki =1f^i -f i f i (18)式中:f i 和f ^i 分别表示实际输出和网络输出,设置粒子群算法的群体数为100,迭代次数为300,惯性权重w s t a r t ㊁w e n d 分别为0.9和0.4,速度更新参数c 1㊁c 2都为2.对于R B F 神经网络,隐含层神经元的个数对其性能影响也较大,如果隐含层神经元个数较少,则R B F 神经网络不能充分地描述输出和输入之间525 第5期付涛等:改进神经网络自适应滑模控制的机器人轨迹跟踪控制的关系;相反,如果隐含层神经元个数较多,则会导致网络的学习时间过长,甚至会出现过拟合现象.在此根据网络输出和实际输出的相关度值R来选择最佳的网络模型,相关度值R的表达式为R=(f-f')(f^-f^')T(f-f')(f-f')T(f^-f^')(f^-f^')T(19)式中:f'和f^'分别表示实际输出和R B F神经网络输出的平均值,相关度值R的范围为(0,1),越接近于1说明网络模型的性能越好,反之则越差. 3仿真分析空间两关节机器人的物理参数如下:m1= 1k g,m2=2k g,l1=1.11m,l2=0.87m,g= 9.8m/s2,J1=J2=5k g㊃m;期望的跟踪轨迹为q d1=q d2=0.3s i n t;初始条件为q(0)= (00)T,q㊃(0)=(00)T;滑模控制的参数设置为K v=d i a g{50,50},Λ=d i a g{5,5};在鲁棒项中,取εN=0.2,b d=0.1.建模误差和外界干扰作用等不确定项的函数表示为τd=(τd1τd2)T,τd1 =α1s i n(β1πt),τd2=α2s i n(β2πt),其中扰动的大小由参数αi和βi确定,其值越大,扰动越大.在仿真过程中,考虑两个关节的扰动不一样,同时为了便于控制算法的对比分析,需要设置一般扰动和大扰动.一般扰动的参数设置为α1=1,α2=5,βi= 1;大扰动的参数设置为α1=40,α2=120,βi=1.在M a t l a bR2012a中编写程序对两关节机器人轨迹跟踪进行仿真实验.表1描述了隐含层神经元个数对R B F神经网络性能的影响,选取的评价指标为程序运行10次后对应的相关度值R 的平均值.从表1可以看出,当隐含层神经元个数为9时,相关度值R的平均值最大,为0.8423,因此选择R B F神经网络的结构为5-9-1,并用粒子群优化算法对该结构的中心位置c和基宽参数b 的选取进行优化.图2为粒子群优化算法的迭代曲线,其中横坐标为迭代次数(g e n e r a t i o n),纵坐标为适应度函数值(f i t n e s s),优化后的基宽参数b 和中心位置c如下:b=13.581.9113.709.481.464.178.2014.3614.47 ()c=-2.05-2.140.931.541.231.94-0.36-0.06-1.34 2.82-0.47-2.781.46-2.801.17-0.71-0.321.07 2.742.942.09-0.65-1.33-1.091.590.870.93 -0.081.752.600.93-2.722.701.771.25-2.02 1.802.761.07-1.97-2.41-2.79-1.871.58-2.28æèççççççöø÷÷÷÷÷÷表110次运行后对应的相关度值R的平均值T a b.1 T h e a v e r a g e v a l u e o f c o r r e l a t i o n R u n d e r 10t i m e s o p e r a t i o n隐含层神经元个数相关度值R最小值最大值平均值50.36740.42530.406360.38710.51600.471570.71480.78510.739980.58240.81930.693890.82630.89840.8423100.77060.83620.8134110.74180.76740.7646为了便于说明本文方法的有效性,采用文献[12]所设计的模糊滑模控制方法和文献[13]中的R B F神经网络滑模控制方法进行比较.基于模糊滑模控制方法的详细设置可参考文献[12],另一用于对比分析的R B F神经网络基宽参数b中的每个值均为10,中心位置c在输入输出域中随机选取,其详细情况可参考文献[13].图2粒子群优化曲线F i g.2 C u r v e o f p a r t i c l e s w a r mo p t i m i z a t i o n625大连理工大学学报第54卷进行对比分析时,图3为模糊滑模控制的仿真结果,图4为基于R B F神经网络滑模控制的仿真结果,图5为改进型R B F神经网络自适应控制的仿真结果,其网络结构和网络参数采用优化后的值.图6㊁图7为大扰动情况下,不同控制方法的仿真结果对比图.(a)关节1位置跟踪(b)关节1控制输入(c)关节2位置跟踪(d)关节2控制输入图3模糊滑模控制的仿真结果F i g.3 S i m u l a t i o n r e s u l t s o f f u z z y s l i d i n g m o d e c o n t r ol(a)关节1位置跟踪(b)关节1控制输入(c)关节2位置跟踪(d)关节2控制输入图4神经网络滑模控制的仿真结果F i g.4 S i m u l a t i o n r e s u l t s o f t h en e u r a l n e t w o r ks l i d i n g m o d e c o n t r o l725第5期付涛等:改进神经网络自适应滑模控制的机器人轨迹跟踪控制(a)关节1位置跟踪(b)关节1控制输入(c)关节2位置跟踪(d)关节2控制输入图5改进神经网络滑模控制的仿真结果F i g.5 S i m u l a t i o n r e s u l t s o f t h e i m p r o v e dn e u r a l n e t w o r ks l i d i n g m o d e c o n t r ol(a)关节1位置跟踪(b)关节2位置跟踪(c)关节1位置跟踪误差(d)关节2位置跟踪误差图6大扰动作用下的位置控制仿真结果F i g.6 P o s i t i o n c o n t r o l s i m u l a t i o n r e s u l t su n d e r l a r g e d i s t u r b a n c e在一般扰动情况下,比较图3㊁图4和图5可知,模糊滑模控制㊁神经网络滑模控制和改进型神经网络滑模控制三种控制方法都能有效地对机器人期望轨迹进行跟踪,并且控制输入也不大,其中模糊滑模控制的跟踪速度较慢,系统存在着较大的抖振,而神经网络滑模控制和改进型神经网络滑模825大连理工大学学报第54卷(a)关节1控制输入(b)关节2控制输入图7大扰动作用下的控制输入仿真结果F i g.7 C o n t r o l i n p u t s s i m u l a t i o n r e s u l t su n d e r l a r g e d i s t u r b a n c e控制的跟踪速度较快,神经网络滑模控制较明显地减弱了抖振,改进型神经网络滑模控制则进一步削弱了系统抖振,说明所设计的改进型神经网络滑模控制能较好地削弱系统抖振.在大扰动情况下,比较图6可知,改进型神经网络滑模控制的跟踪误差要好于另外两种控制方法,模糊滑模控制的跟踪误差最大.比较图7可知,在控制力矩方面,改进型神经网络滑模控制相比于神经网络滑模控制变化不大,表现出较强的鲁棒性.4结语针对机器人轨迹跟踪控制的问题,在考虑了系统建模误差㊁外界干扰的情况下,提出了一种改进型神经网络滑模控制方法,考虑到隐含层单元数和网络结构参数对神经网络映射有效性的影响,将降低抖振作为优化目标,采用粒子群优化算法对网络结构参数进行优化,使降低滑模抖振和加快误差收敛速度达到最佳.通过仿真实验和对比分析可知,该方法所设计的控制系统具有良好的鲁棒性和控制精确度,同时有效削弱了抖振.参考文献:[1]苗卓广,谢寿生,丁键,等.基于R B F网络的航空发动机预测滑模控制[J].北京航空航天大学学报,2013,39(12):1601-1606.M I A O Z h u o-g u a n g,X I E S h o u-s h e n g,D I N GJ i a n,e ta l.P r e d i c t i v e s l i d i n g m o d e c o n t r o lf o r a e r o-e n g i n eb a s e d o n R B F n e t w o r k[J].J o u r n a l o fB e i j i n g U n i v e r s i t y o fA e r o n a u t i c sa n d A s t r o n a u t i c s,2013,39(12):1601-1606.(i nC h i n e s e) [2]胡盛斌,陆敏恂.空间三关节机器人自适应双模糊滑模控制[J].同济大学学报:自然科学版,2012,40(4):622-628.HU S h e n g-b i n,L U M i n-x u n.A d a p t i v e d o u b l ef u z z y s l i d i ng m o d ec o n t r o lf o rth r e e-li n k s s p a t i a lr o b o t[J].J o u r n a lo f T o n g j i U n i v e r s i t y:N a t u r a l S c i e n c e,2012,40(4):622-628.(i nC h i n e s e) [3]王伟,易建强,赵冬斌,等.一种新型神经网络滑模控制器的设计[J].电机与控制学报,2005, 9(6):603-606.WA N G W e i,Y IJ i a n-q i a n g,Z HA O D o n g-b i n,e ta l.D e s i g no f an e wt y p eo f n e u r a l n e t w o r ks l i d i n g-m o d e c o n t r o l l e r[J].E l e c t r i cM a c h i n e s a n dC o n t r o l, 2005,9(6):603-606.(i nC h i n e s e)[4]刘金琨.机器人控制系统的设计与MA T L A B仿真[M].北京:清华大学出版社,2008.L I U J i n-k u n.D e s i g na n d M A T L A B S i m u l a t i o nf o rR o b o t C o n t r o l S y s t e m[M].B e i j i n g:T s i n g h u aU n i v e r s i t y P r e s s,2008.(i nC h i n e s e)[5]黄永安,邓子辰,姚林晓.基于神经网络混合建模的结构振动滑模控制[J].振动工程学报,2005, 18(4):465-470.HU A N G Y o n g-a n,D E N GZ i-c h e n,Y A OL i n-x i a o.S l i d i n g m o d e c o n t r o l f o r f l e x i b l e s t r u c t u r a l v i b r a t i o n r e d u c t i o n b a s e do n h y b r i d n e u r a ln e t w o r k m o d e l s[J].J o u r n a l o f V i b r a t i o n E n g i n e e r i n g,2005, 18(4):465-470.(i nC h i n e s e)[6]刘金琨,孙富春.滑模变结构控制理论及其算法研究与进展[J].控制理论与应用,2007,24(3):407-418.L I U J i n-k u n,S U N F u-c h u n.R e s e a r c h a n dd e v e l o p m e n to n t h e o r y a n d a l g o r i t h m s o fs l i d i n gm o d e c o n t r o l[J].C o n t r o lT h e o r y&A p p l i c a t i o n s, 2007,24(3):407-418.(i nC h i n e s e)[7]牛玉刚,赵建丛,杨成梧.不确定机械手的自适应神经滑模控制[J].探测与控制学报,2000,22(2): 55-59.N I U Y u-g a n g,Z HA O J i a n-c o n g,Y A N G C h e n g-925第5期付涛等:改进神经网络自适应滑模控制的机器人轨迹跟踪控制w u.N e u r a ln e t w o r k-b a s e da d a p t i v es l i d i n g m o d e lc o n t r o lo fu n c e r t a i n m a n i p u l a t o r s[J].J o u r n a lo fD e t e c t i o n&C o n t r o l,2000,22(2):55-59.(i nC h i n e s e)[8]王贞艳,张井岗,陈志梅.神经网络滑模变结构控制研究综述[J].信息与控制,2005,34(4):451-456, 475.WA N GZ h e n-y a n,Z HA N GJ i n g-g a n g,C H E NZ h i-m e i.As u r v e y o f r e s e a r c ho nn e u r a l n e t w o r k s l i d i n gm o d ev a r i a b l es t r u c t u r ec o n t r o l[J].I n f o r m a t i o na n d C o n t r o l,2005,34(4):451-456,475.(i nC h i n e s e)[9]蔡自兴.机器人学[M].2版.北京:清华大学出版社,2009:88-96.C A I Z i-x i n g.R o b o t i c s[M].2n d e d.B e i j i n g:T s i n g h u a U n i v e r s i t y P r e s s,2009:88-96.(i nC h i n e s e)[10]林雷,任华彬,王洪瑞.基于径向基函数神经网络的机器人滑模控制[J].控制工程,2007,14(2): 224-226.L I N L e i,R E N H u a-b i n,WA N G H o n g-r u i.R B F N N-b a s e ds l i d i n g m o d ec o n t r o l f o rr o b o t[J].C o n t r o lE n g i n e e r i n g o fC h i n a,2007,14(2):224-226.(i nC h i n e s e)[11]史峰,王辉,郁磊,等.MA T L A B智能算法30个案例分析[M].北京:北京航空航天大学出版社,2011.S H IF e n g,WA N G H u i,Y U L e i,e t a l.M A T L A BI n t e l l i g e n tA l g o r i t h m A n a l y s i s o f30C a s e s[M].B e i j i n g:B e i h a n g U n i v e r s i t y P r e s s,2011.(i nC h i n e s e)[12]刘金琨.滑模变结构控制MA T L A B仿真[M].2版.北京:清华大学出版社,2012.L I U J i n-k u n.S l i d i n g M o d e C o n t r o l D e s i g n a n dM A T L A B S i m u l a t i o n[M].2n d e d.B e i j i n g: T s i n g h u aU n i v e r s i t y P r e s s,2012.(i nC h i n e s e) [13]张文辉,齐乃明,尹洪亮.自适应神经变结构的机器人轨迹跟踪控制[J].控制与决策,2011,26(4): 597-600.Z HA N G W e n-h u i,Q IN a i-m i n g,Y I N H o n g-l i a n g.N e u r a l-v a r i a b l es t r u c t u r e-b a s e d a d a p t i v et r a j e c t o r y t r a c k i n g c o n t r o l o f r o b o tm a n i p u l a t o r s[J].C o n t r o la n dD e c i s i o n,2011,26(4):597-600.(i nC h i n e s e)R o b o t t r a j e c t o r y t r a c k i n g c o n t r o l o f i m p r o v e dn e u r a ln e t w o r ka d a p t i v e s l i d i n g m o d e c o n t r o lF U T a o,W A NG D a-z h e n*,G O N G Q i n g-z h o n g,Q I L i(C o l l e g eo fM e c h a n i c a l a n dE n e r g y E n g i n e e r i n g,J i m e i U n i v e r s i t y,X i a m e n361021,C h i n a)A b s t r a c t:I no r d e r t o i m p r o v e t h e t r a j e c t o r y t r a c k i n g c o n t r o l p e r f o r m a n c eo f t h er o b o t,am o d i f i e d n e u r a l n e t w o r ka d a p t i v e s l i d i n g m o d e c o n t r o lm e t h o d i s p r o p o s e do n t h eb a s i so f t h en e u r a l n e t w o r k s l i d i n g m o d e c o n t r o lm e t h o d.T h i sm e t h o d u s e s n e u r a l n e t w o r k a s a c o n t r o l l e r,a n d u s e s t h e n o n l i n e a r m a p p i n g a b i l i t y o fn e u r a ln e t w o r kt oa p p r o x i m a t eu n k n o w n n o n l i n e a r i t y.A tt h es a m et i m e,t h e r o b u s t c o n t r o l l a wi sa d d e dt oe l i m i n a t et h ea p p r o x i m a t i o ne r r o r.C o n s i d e r i n g t h e i n f l u e n c eo f t h e h i d d e n l a y e ru n i tn u m b e ra n dt h en e t w o r ks t r u c t u r e p a r a m e t e r so nt h ev a l i d i t y o fn e u r a ln e t w o r k m a p p i n g,r e d u c i n g c h a t t e r i n g i sr e g a r d e da so p t i m i z a t i o nt a r g e t,a n d p a r t i c l es w a r m o p t i m i z a t i o n a l g o r i t h mi s a d o p t e d t o o p t i m i z e t h e n e t w o r k s t r u c t u r e p a r a m e t e r s.F i n a l l y,t h e s i m u l a t i o n e x p e r i m e n t i sd o n eu n d e rt h ee n v i r o n m e n to f M a t l a b/S i m u l i n k,a n dc o m p a r a t i v ea n a l y s e s w i t h o t h e rc o n t r o l m e t h o d s a r e c o n d u c t e d.T h e s i m u l a t i o n r e s u l t s s h o wt h a t t h e c o n t r o l s y s t e md e s i g n e d b y t h e p r o p o s e d m e t h o dh a s g o o d r o b u s t n e s s a n d c o n t r o l p r e c i s i o n,a n d c a n r e d u c e t h e c h a t t e r i n g e f f i c i e n t l y.K e y w o r d s:n e u r a l n e t w o r k;r o b o t;t r a j e c t o r y t r a c k i n g;s l i d i n g m o d e c o n t r o l;p a r t i c l e s w a r m o p t i m i z a t i o na l g o r i t h m035大连理工大学学报第54卷。
基于滑模PID神经网络控制的混沌同步

基于滑模PID神经网络控制的混沌同步杨文光;高艳辉;隋丽丽【摘要】对于多输入多输出(multiple inputs multiple outputs,简称MIMO)混沌系统的同步问题,设计了基于误差比例-积分微分(proportional integral derivative,简称PID)改进下的滑模径向基函数神经网络(radial basis function,简称RBF)控制方法,实现了主从统一混沌系统的同步.设计自适应RBF滑模控制器,将其用于初值不同的不确定主从统一混沌系统的同步控制中,证明了控制的Lyapunov稳定性.最后结合MATLAB仿真实验验证了所提方法的可行性与有效性.%For the synchronization of multiple inputs multiple outputs (MIMO) chaotic systems,a sliding mode radial basis function neural network (RBF) control method based on error proportional integral derivative (PID) control was proposed,and the synchronization of master-slave unified chaotic system with the same and different structure was received.An adaptive RBF sliding mode controller was designed,which was used for the synchronization control of uncertain master-slave unified chaotic systems with different initial values,and the Lyapunov stability of the control wasproved.Finally,the feasibility and effcctiveness of the proposed method was verified by MATLAB simulation.【期刊名称】《安徽大学学报(自然科学版)》【年(卷),期】2017(041)002【总页数】5页(P72-76)【关键词】统一混沌系统;同步;PID;滑模控制;RBF【作者】杨文光;高艳辉;隋丽丽【作者单位】华北科技学院基础部,北京101601;北京航空航天大学自动化科学与电气工程学院,北京100191;华北科技学院基础部,北京101601;华北科技学院基础部,北京101601【正文语种】中文【中图分类】O415在混沌系统的研究初期,由于混沌系统具有极端的复杂性、初值的极端敏感性、运行的无规则性等特点,混沌同步被认为是十分困难的.直到1990年Pecora等[1]提出混沌同步方法,并在电路中首次观察到了混沌同步现象,才为混沌系统的开发利用带来了发展机遇.同年,参数微扰控制方法由Ott等[2]首次提出,驱动混沌系统控制同步从此成为混沌研究领域的热点问题.随着计算机技术与信息通信技术的交叉融合,混沌同步在混沌保密通信中发挥了越来越重要的作用[3-6].在混沌控制与混沌系统分析领域,吕金虎等[7]在2002年提出了统一混沌系统.由于统一混沌系统会受参数摄动而呈现出不同的混沌状态,于是成为不同混沌系统联系的纽带.统一混沌系统有机地连接了Lorenz吸引子和Chen吸引子,并使得Lü系统成为它的特例[8-9].在理论分析中,经典的控制方法通常采用直接或者间接抵消掉响应系统的非线性项来达到系统同步的目的,由于一些非线性项难于测量而不便应用于实际.RBF(radial basis function)神经网络作为一种具有良好逼近性能的神经网络得到了非常广泛的应用[10-11].滑模变结构控制因其有目的地迫使被控系统按照预定的滑模面运动,而表现出极强的快速响应、无需在线辨识与实现简单的特点,受到广泛关注[12-14].笔者为了实现多输入多输出混沌系统的同步,努力减弱受控系统的非线性动力学行为,利用PID(proportional integral derivative)控制思想设计滑模函数,结合RBF神经网络与滑模控制技术生成多个并行控制器,实现了在线优化RBF神经网络权值与同步跟踪性能.在同步跟踪中只需要知道不确定主从统一混沌系统的状态信息,而无需知道其他任何非线性不确定信息,就使得响应系统的动力学行为不受其影响.最后结合MATLAB仿真实验验证了所提方法的可行性与有效性.统一混沌系统既是一种经典的混沌系统,同时也是联系多个不同混沌系统的桥梁,实现主从统一混沌系统的同步,对于实现其他混沌系统的同步具有很好的借鉴意义.如果统一混沌系统中含有不确定项与非线性项,那么其混沌特性将更符合客观实际和应用需求.下面将从主从混沌系统描述与说明、滑模PID神经网络同步控制器的设计两个方面加以阐述.1.1 系统描述与说明选择统一混沌系统[7]的驱动系统(主系统)为选择统一混沌系统[7]的响应系统(从系统)为将公式(1)、(2)分别简记为其中:α,β为系统参数时系统呈现混沌状态.x,y为系统状态向量,且特别地,主从混沌系统:当α=β=0时,均为Lorenz系统;α=β=1时,均为Chen系统;α=β=0.8时,为Lü系统[7-9];α,β∈[0,0.8)时,为广义的Lorenz系统;α,β∈(0.8,1]时,为广义的Chen系统.在考虑参数摄动与外部干扰的情况下,统一混沌系统就成为了不确定统一混沌系统.为了实现两个不确定统一混沌系统的同步,需要在统一混沌从系统中加入控制输入得到其中:A,B均为3阶的线性定常的方阵;△Ax,△By为线性干扰项;为非线性向量项;为非线性扰动项;为外部干扰项.控制输入向量假设与均是有界的.公式(3)表示不确定主统一混沌系统,公式(4)表示不确定从统一混沌系统.1.2 滑模PID神经网络控制器设计与稳定性分析为了实现主从统一混沌系统的同步,设计出3个单输入单输出的RBF神经网络,使用PID控制思想改进的滑模控制中的滑模函数,实现神经网络的在线学习能力与滑模变结构控制技术结合共同优化设计使得‖‖=0,其中为了减弱受控系统的非线性动力学行为,下面利用RBF神经网络与PID控制思想结合设计出动态滑模面其中:k1i,k2i,k3i>0,且k1i,k2i,k3i的选择取决于满足Hurwitz稳定的多项式:即的全部特征值都分布在复平面的左半平面内,i=1,2,3. 动态滑模面的设计集成了误差、误差变化率与误差的积分,体现了PID控制思想,同时充分兼顾了同步系统的过去、现在与未来的差异性.RBF神经网络是一种具有良好逼近性能且仅包含输入层、隐含层与输出层的简单神经网络,其中输入层包括1个神经元,隐含层包括m个神经元,输出层包括1个神经元. 论文将作为第i个RBF神经网络的输入,其输出为第i个状态变量的控制量则可表示为其中:pi是比例因子,pi>0,i=1,2,3.对于第i个状态变量xi与yi,选择误差函数表达式为当误差时,有则所以选择公式(7)作为RBF神经网络的误差函数,用于动态调整网络的隐含层到输出层权值wij,i=1,2,3,j=1,2,…,m.定理1 对于不确定的统一混沌系统(3)与(4),若中的控制分量采用公式(6)的形式,RBF神经网络的误差函数选择为公式(7)的形式,则权值wij的在线调整律为且控制系统是渐进稳定的.证明由于RBF神经网络属于前向神经网络,所以学习算法采用误差反向传播算法,有其中:ηi为学习率;h为采样步长;i=1,2,3;j=1,2,…,m.对于第i个RBF滑模PID控制器取Lyapunov函数为有因为RBF神经网络采用的是误差反向传播学习算法,故误差函数的导数所以,有.由此可知控制系统是渐进稳定的.下面利用MATLAB编程进行仿真,利用上面建立的滑模PID神经网络控制,实现主从统一混沌系统的同步.仿真实验中,统一混沌系统同步时主从系统的参数取值分别为k12=1,k22=0.1,k32=0.1,k13=1,k23=0.1,k33=2,η1=η2=η3=100,同步时,主系统的初值为从系统的初值为神经网络的结构为1-7-1形式.统一混沌系统的同步结果见图1,各个状态输出与同步误差见图2~4,图5给出了同步的控制输入.论文利用PID控制思想设计了滑模函数,生成了多输入多输出(MIMO)混沌系统的多个RBF神经网络,每个RBF神经网络均为单输入单输出结构,以滑模函数作为输入,提高了滑模控制的控制精度,减弱了控制抖振.通过Lyapunov稳定性理论分析证明了所设计的滑模PID神经网络控制的渐进稳定性.最后,结合MATLAB 仿真,实现了初始值不同的两个不确定统一混沌系统同结构与异结构同步.仿真结果表明,论文所建立的控制器对于存在外部干扰与参数扰动的不确定的MIMO混沌系统的控制是有效的,控制器的设计仅仅依靠主从混沌系统的状态输出,便于实际应用.【相关文献】[1] PECORA L M, CARROLL T L. Synchronization in chaotic systems[J]. Phys Rev Lett,1990, 64 (8): 821-824.[2] OTT E, GREBOGI C, YORKE J A. Controlling chaos[J]. Phys Rev Lett, 1990, 64 (11): 1196-1199.[3] 王兴元. 混沌系统的同步及在保密通信中的应用[M]. 北京:科学出版社, 2012.[4] 李震波,唐驾时. 参数扰动下的混沌同步控制及其保密通信方案[J]. 控制理论与应用, 2014, 31(5): 592-600.[5] 李雄杰,周东华. 一种基于强跟踪滤波的混沌保密通信方法[J]. 物理学报, 2015, 64 (14): 140501.[6] 于娜,丁群,陈红. 异结构系统混沌同步及其在保密通信中的应用[J]. 通信学报, 2007, 28 (10):73-78.[7] LUE J H, CHEN G, CHENG D, et al. Bridge the gap between the Lorenz system and the Chen system[J]. International Journal of Bifurcation and Chaos, 2002, 12 (12): 2917-2926.[8] LUE J, CHEN G. A new chaotic attractor coined[J]. International Journal of Bifurcation and Chaos, 2002, 12 (3): 659-661.[9] LUE J, ZHOU T, CHEN G, et al. Generating chaos with a switching piecewise-linear controller[J]. Chaos, 2002, 12 (2): 344-349.[10] 郭会军, 刘丁, 赵光宙. 受扰统一混沌系统基于RBF网络的主动滑模控制[J]. 物理学报, 2011, 60 (1): 010510.[11] 任亚, 李萍. 基于RBF神经网络的中国CPI预测研究[J]. 西安财经学院学报, 2011, 24 (1): 62-65.[12] 潘光,魏静. 一种分数阶混沌系统同步的自适应滑模控制器设计[J]. 物理学报, 2015, 64 (4): 040505.[13] 李华青, 廖晓峰, 黄宏宇. 基于神经网络和滑模控制的不确定混沌系统的同步[J]. 物理学报, 2011, 60 (2): 020512.[14] 高为炳. 变结构控制的理论及设计方法[M]. 北京:科学出版社, 1998.。
混沌神经网络的研究及其应用---王敏瑞
上海大学2010 ~2011 学年冬季学期研究生课程论文课程名称:《动力系统基础》课程编号:011201907论文题目: 混沌神经网络的研究及其应用作者姓名:王敏瑞学号: 10720072 成绩: 论文评语:评阅人签名:批阅日期:混沌神经网络的研究及其应用王敏瑞(上海大学理学院,上海200444)摘要:本文通过保持暂态混沌神经元的混沌搜索机制,产生了一类新的混沌动力学系统。
首先分析了该混沌动力系统的参数对系统的影响;其次分析了其混沌时间序列的Lyapunov指数、关联维、熵等动力学特性。
举例通过试验分析验证了该混沌动力系统在密码学上应用。
关键词:混沌动力系统混沌神经元Lyapunov指数The Research And Application OfChaotic Neural NetworkWang Minrui(College of science, Shanghai University, Shanghai 200444. China)Abstract:This paper presents a kind of novel chaotic dynamic system by maintaining the chaotic searching mechanism of TCNN. First, we make an analysis of the parameters’ effects to the system; second, we make an analysis of the Lyapunov exponent, correlation dimension, entropy of the chaotic time series. The test proves that the chaotic dynamic system in encrypt is valid.Key Words: chaotic dynamic system chaotic neural unit Lyapunov exponent0.引言目前广泛研究的混沌神经网络模型是在Hopfield神经网络中引入了一个具有混沌特性的负反馈项,进而得到了混沌神经网络模型,因此在深入研究混沌神经网络之前,有必要先介绍一下Hopfield神经网络。
PID神经元网络与控制算法
在传统的控制中,往往只考虑控制系统和受控系统所组成的独立体系, 忽略了环境所施与的影响,而现在的大规模复杂的控制和决策问题,必须 把外界环境和对象,以及控制系统作为一个整体来进行分析和设计。
工程用语到数学描述的映射过程中,一方面使问题作了很多简化,但 另一方面却使原问题丢失了很多信息。
(1)不适应不确定系统的控制 (2)不适应非线性系统的控制 (3)不适应时变系统的控制 (4)不适应多变量系统的控制
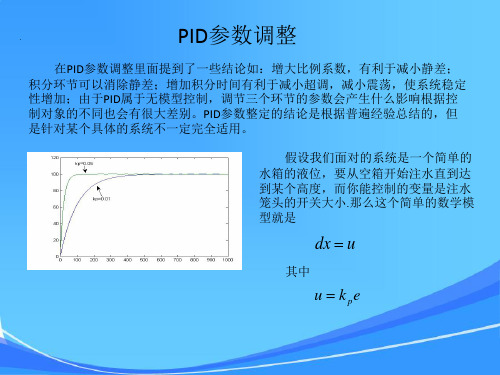
假设水箱假设咱们这个水箱不仅仅是
装水的容器了,还需要持续稳定的给用户 供水。
dx=u-c
当dx=0时,e= c .e在系统稳定时不为零,这就是 kp
所谓的静差.如果c固定,增大k p那么e就会减小.
增大比例系数k
有利于在有静差的情况下减小静
p
差.
积分的意义在于相当于你增加了一个水龙
头,这个水龙头的规则是,水位比预定水位低 就一直往大拧,比预定高度高就往小拧.如果漏 水速度不变,那么总有一天这个水龙头的出水 速度恰好和漏水速度相同.
神经元网络是以大脑生理研究成果为基础模拟大脑的某些机理或者机 制,由人工建立的以有向图为拓扑结构的网络,它通过对连续或断续的的 输入做响应处理。神经元网络具有很强的信息综合能力,它能处理大量不 同类型的输入信息。
基于神经元的智能控制系统也称基于连接机制的智能控制系统,随着人 工智能网络越来越多地应用于控制领域的各个方面。从过程控制,机器人控 制,生产制造,模式识别,直到决策支持都有许多应用神经元网络的例子。 它在系统的辨识、建模、自适应控制中特别收到重视,尤其是他比较好地解 决了具有不确定性、严重非线性、时变和滞后的复杂系统的建模和控制问题。 但是,一般神经元网络的弱点,制约了其在控制系统中的应用.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
%1 9 @ ( + 4 & : + = E = : KK 8 BM B L B R K NA L( ) *: B > J 9 ?: B K X A J YA K = E = Z B MI (9 ? A J = K 8 E# 9Y = : MA L( ) *: B > J 9 ?: B K X A J Y ;9 O G' ; . / 01" = NO J A A N B M9 : M9 ? = B M = :E 9 : = > + K J 9 = : = : B K 8 A MI 9 N B MA :E > K 9 K = Q B N R 9 ? B R 8 9 A NA K = E = Z 9 K = A :9 ? A J = K 8 E! O O O O ;E O ; ? 9 K A J K J 9 B R K A J J 9 R Y = : A : K J A ? # 2 8 B: B > J 9 ?: B K X A J YX B = 8 K NR 9 :I BA K = E = Z B MI 9 Y = : N BA LK 8 BB J A M = R = K L [ GK ;R ; O GE ;> ; GA # R 8 9 A N 9 : MK 8 BN B 9 J R 8B L L = R = B : R 9 :I B = : R J B 9 N B MK 8 J A > 8: 9 J J A X = : A ? > K = A :N 9 R B # 2 8 J A > 8B N K 9 I ? = N 8 = : 8 BO J B M = R + GR ; ;N O ; ;K K = Q BE A M B ? A LE 9 : = > ? 9 K A JI K = ? = Z = : . / 01 + ( ) * ,,# 9 : MI N = : 8 BE > ? K = + N K B J B M = R K = Q BA I B R K = Q BL > : R K = A :K A O G> ;G> ;K OO [ # E 9 : = > ? 9 K A J K J 9 B R K A J K J 9 R Y = : J B M = R K = A :R A : K J A ? R 9 :I B J B 9 ? = Z B M # 2 8 B N = E > ? 9 + K J 9 = :K 8 BX B = 8 K NA L( ) * ,,R A : K J A ? ? B J ; O [ G ;O K = A :J B N > ? K NN 8 A XK 8 9 K K 8 BO B J L A J E 9 : R B NA L. / 01 + ( ) * ,,9 J BI B K K B J K 8 9 :K 8 A N BA L' ( + ( ) * ,,= :E 9 : = > ? 9 K A J K J 9 B O [ R K A J J 9 R Y = : A : K J A ? # GK ;R % $ $ $ J B M = R K = Q BR A : K J A A 2 ' 4 8 ( R 8 9 A NA K = E = Z 9 K = A : ( ) *: B > J 9 ?: B K X A J Y$ E 9 : = > ? 9 K A J K J 9 B R K A J J 9 R Y = : ? O O O [ GK ; =6
$ % & ' () + , , . & + , ' /' 0! " #1 2 3 4 & 51 2 + 6 ' 4 7& / 8" + (9 5 , : & + , ' / , /+ % 2 * * * ; 4 & 2 : + ' 4 4 & : 7 , / ' / + 4 ' 5 ' 0? & / , 3 5 & + ' 4 < =; >$ *
&'(R ( ) * LMNObcJK@i¦,mnopqr-.FWjk
0 ' 1 2 3 4 ( ' 56 7 4 3 8 ' 3 3 ; < = 2 > ; 56 , ; = 3 , =4 3 8@ = , 7 3 ' ( ' 9: ?' 9 ?
. #
!" # $% " &'( ) *+(*
< B ? ! " # 1 1 STUV< C = # !2 A A ? A = R 9 ? N K J > R K > J BA L-( ) * ,, ; O ;
¿± -( ) * ,, J ;<=> ' -( ) * ,, g} ?@A " JÁ B ö~ûð % Ò ' ' C, - <= . J , $ # D <= ., Ì $ ( $ % ""# "") # $ % "" & '! & '! & '! +# $ ' Ǿ % & $0 >J EF ! & ) !# "# #" ' $0 > , -EF ! ' ) !# ""
" + 4) '}o ' rsJtu<=>? # FGS T v w * x y z { |( ~{>? (! I 9 R YO J A 9 9 K = A :" O ; &) # ( >?{~ ' t F G _ * _ M x _# Ag#Jy 5 + %) ' o ¡ ¢ ~ ! [ G u ( -. / 01# E > K 9 K = Q BN R 9 ? BR 8 9 A NA K = E = Z 9 K = A :9 ? A + O ;
( \) ! $) ' ÆÇÈz ( ÉÂ]^_aÊ # ËÌ ¿ Í Î Ï Ð _ A Ñ ¦ Ò J < = > ? Ã t u B C Ó # ÔÕÖaÊ
FGÏÐBCJ×| ' ØÏÐBCJÙÚM<=>?à t u B C J Ù Ú S Û Ü Ý # oÍÎÏÐ_AѦ§
! $ + ! ") ' ¨Þßà<=>?ÃtuBCáJ # FGÃCMÏÐBCâãJ{ä (
GHI# " $ ! 4 + $ & + ! $ " JKLM !"#$%&'()* ! 5 $ % 3 5 ! 6 % # % NOPQ +,- ! .# /0123 # 45 # 67 # 89:;<=>?@ABCDE # ! \ % 6&" P + E 9 = ? Z ] ? N > N > # B M > # R : G G
3 + 6) ' o -. { # £ ¤ u J ¥ M * ¦ § ¨ J © ¢ ª «# ¬ ® ¯ { ( J = K 8 E" / 01 { z· ' ( ) * ,, ¬G°±² ' ( ~³´µ¢¶ *
<=>?g¸¹º»¼½BC¾jk¿lmJn o # À*Á¸¹<=>?ÃBCJDEÄÂb Å
AUVPWXYZ[\J]^_`a # NFGbHJ <=>?FGHIJ&KALMNOPQRST # ( ) ! # ' ! " c d_Mef_ gBChijklmno ( pq ) * ,, O J A A J K = A : = : K B J 9 ? M B J = Q 9 K = Q B: B > J 9 ? : B K X A J Y O ;
67 HI ' PQRST U V W X Y Z[\]^_`abcJK ( ( JK ( ) * LMNO ' ( + ( * ,, ) * LMN Od*ef ghijkl,mnopqr-.F skbctuWvwxJKNOyz {| . / 01 + ( ) * ,, }~JK_zZ k x . / 01 + ( ) * ,, , m n W JK ( 2 , m n o p q r W - . ¡ ¢ £ ¤ ¥ ) * L M N O - . . / 01 + ( ) * ,, ¦,mnopqr-.FxJl ' ( + ( ) * ,, 89: bcJK ,mn opqr -. ( ) * LMNO ! " ;<=>? 2 ( " 3 4 @ABCD 1 @EF? ! % 3 " + 4 3 % 3 " $ ! 4 $ 5 + $ $ 6 & + $ %
/ 01 + ( ) * ,, N æ Ç n o ç ¸ ¹ º å D E Ë Ì -. »¼½B C ¾ ' -. / 01 + ( ) * ,, £ ¤ ç è B  é J ê ë¨&ìí # FGcd_Mef_ # îgqïð¢ñ±²¿ <=>?ÏÐBC¾<=>?ìíSTòóôõM&K~ z ø ù ' ú û ü ý è B  é ö~÷I * ÏÐìí # oÍÎÏÐ_AѦ§¨{<=>?ÃBC á# ¸¹aÊOº»¼½BC # þk¿ÿ ! BC° " '