VMT导向系统操作规程学习资料
激光导向系统VMT在TBM施工中的应用技术

应用和推广 , 逐步替代 了传统 的钻爆施 工技术 , 而被喻为盾构机 “ 眼睛” 之称的激光导向系统也随之得到成 功的运用 、 推广 、 发展和 完善 。激光导 向系统 的运用 , 极大地提 高了盾构法施 工 的准确性 、 可 靠性和 自动化程 度 , 从 而被广泛应 用于 地铁 、 铁路、 公路 、 市 政、 水 电等大 型地下 隧道工程 的施工 。 关键词 :盾构机 TUN I S ; 激光导 向系统 ; 盾构姿态 ; VMT; 隧洞施工 ; 调 向
上 以 2号支 洞 为界 , 总体 上 可分 为 东 、 西两部分 , 输
保 的显 著特 点 , 显 示 出 比其 它 施 工 方 法 的 优 越 性 。
盾构 机 是盾 构 隧 道 掘进 机 的 简称 , 英 文 简称 TB M,
是英 文 “ Tu n n e l B o r i n g Ma c h i n e ” 的缩 写 。T B M 是
闭时 , 洞 内出现 压力 流状 态 。 输 水 隧 洞 采 用 2台撑 靴 式 双 护 盾 硬 岩 掘 进 机 ( TB M) 施 工 为主 , 并辅 以钻爆 法 ( D B M) 施工 。2台
片) 、 测 量导 向( 自动导 向 系统 ) 纠偏 等 功 能 , 而 且 可 以 根据 工程 的地 质 情 况及 开挖 的洞 型进 行 “ 量体 裁
科多 一辛克 雷) 水 电 站 撑 靴 式 双 护 盾 硬 岩 掘 进 机
目前在 TB M 上 常 用 的激 光 导 向 系 统 有 德 国 VMT公 司 的激 光 导 向系 统 、 英国 Z E D公 司激 光 导 向系统 、 日本 TOKI ME C公 司 的 TMG一 3 2 B陀 螺
按照设计路线快速掘进 , 单纯依靠常规 的人工测 量
盾构测量自动导向系统
米度不仅提供了产品,还提供了全方 位的技术服务
中铁隧道股份有限公司
~ 30 ~
价格
VMT的增值服务
210万元人民币/套
米度增值服务
150万元人民币/套
中铁隧道股份有限公司
~ 31 ~
最终结论
结论一:技术、功能、硬件方面两套系统差别甚微; 结论二:售后服务,米度系统更有保障; 结论三:价格,米度系统比VMT系统便宜60万元人民币;
米度售后服务
免费服务:2年,之后收取合理的人工费用 服务响应:12小时内 服务范围:系统本身,其他隧道测量技术咨询 硬件备用:提供终身硬件免费备用服务 系统软件:终身免费升级
中铁隧道股份有限公司
~ 29 ~
增值服务
VMT的增值服务
无
米度增值服务
赠送’隧道精灵’盾构施工测量软件 免费的隧道测量技术咨询服务 免费数据处理计算复核服务
中铁隧道股份有限公司
~6~
供电系统
VMT供电系统 米度供电系统
220VAC供电 全站仪附近必须提供220VAC电源 全站仪周围布设有电力线缆 安装、日常使用需布设线缆,一是耗费 时间,二是线缆在现场容易被扯断。
大容量电池供电。 电池续航时间:3~5天 全站仪附近无须提供220VAC电源 全站仪周围不须布设线缆
输入的参数直观易懂
中铁隧道股份有限公司
~ 13 ~
系统功能
中线计算 – 比较结论
比较项目 输入 平面偏移 垂直偏移 适应设计情况 难度 VMT 元素法 独立输入 独立输入 适应全国地铁设计 简单 米度 元素法 独立输入 独立输入 适应全国地铁设计 简单
中铁隧道股份有限公司
~ 14 ~
VMT盾构导向系统软件SLST计算DTA线路元素输入方法
VMT(SLS-T)软件计算盾构线路DTA
软件准备:VMT盾构导向软件。
Ps:该软件的字体包必须是大写字母开头的,如果没有汉化包(CHINESE.DLL),英文的也能用。
操作点:
1、水平角单位“gon”:90度=100gon。
2、水平角是与正东方的夹角,顺时针为正。
3、弯曲选项:“向左”应为实际是向右。
4、半径正负:左转为正,右转为负。
5、偏差:左偏为正,右偏为负。
切偏差为该元素起点处的偏差。
6、平曲线角偏差,只要输入第一段直线的角偏差就好,以后的不用再
输。
7、竖曲线角偏差:第一段直线角偏差为坡角度(gon)上坡为正。
以后
的直线,皆为与前一段直线的相对方向夹角,顺时针为正。
8、竖曲线半径:凹曲线为正,凸曲线为负。
9、竖曲线只用第一段直线取角偏差(或初始点角偏差),之后的夹直线
段,不用输入角偏差。
10、竖曲线圆曲线的长度约为2倍切线长,半径越大越接近。
11、平纵曲线长度应一样。
有错误的地方,希望各位前辈指正批评(729694040),以免误导他人。
还有其他功能未完全理解,希望大家相互分享交流。
此软件虽然难用,但是毕竟是专业的盾构软件,计算数据应有一定的权威性。
计算结果最好上图CAD且用其它专业计算软件对比方可确认无误。
作者蒲40 2016-9-13于广东华隧。
VMT导向系统操作规程学习资料
第七章VMT导向系统操作规程目录1VMT简介7-3 2SLS-T导向系统7-32.1工作原理2.2SLS-T系统组成3盾构测量的五项内容7-4 4盾构机的施工测量7-44.1隧道误差分布4.2施工测量5隧道掘进软件的操作7-55.1隧道设计线路(DTA)数据的输入和编辑5.2激光全站仪的搬站操作程序5.3盾构机掘进测量5.4盾构机管片安装1.VMT简介VMT是专为隧道开发掘进导向系统和提供测量服务的测量技术公司,成立于1994年,现在主要的产品是SLS-T APD 导向系统。
2.SLS-T导向系统SLS-T APD 导向系统和隧道掘进软件全天侯提供盾构机的三维坐标和定向的连续的动态信息。
2.1.工作原理由激光经纬仪发射出一束可见红色激光束,激光束照射到ELS靶,光束相对于ELS靶的位置已精确测定,水平角是由激光经纬仪照射到ELS靶的入射角决定的.在ELS靶内部安装有一个监测ELS靶倾角和转角的双轴传感器,可以分别测ELS靶的上下倾角(yaw angle)、左右倾角(pitch)和入射点相对于ELS靶的中心线的旋转角(roll)。
激光照射到ELS靶的间距由TCA全站仪的EMD测定。
这样,当测站坐标和后视坐标确定后, ELS靶的方位和坐标就确定下来了。
根据ELS靶的中心和盾构机的主机轴线平面几何关系,就可以确定盾构机的轴线。
再把隧道设计中心线(DTA)的坐标(米/个)输入隧道掘进软件,就可以全天候的动态显示盾构机主机和隧道设计中心线(DTA)的关系。
2.2.SLS—T系统组成2.2.1.激光全站仪(Laser-Theodolite)激光全站仪(Leica TCA1103/ART/GUS64)是同时测量角度(水平和垂直)和距离的测量仪器,并能发射出一束可见红色激光。
LeicaTCA1103激光全站以仪器参数:测角精度:3.3″(1mgon)测距精度:2mm+2ppm2.2.2.黄色盒(YellowBox)主要是为全站仪和激光器提供电源,也连接全站仪和主控室的PC机的通讯。
vmt导向系统操作规程
VMT导向系统操作规程1. 引言VMT(Virtual Machine Technology)导向系统是一种基于虚拟机技术的系统,用于提高软件开发和测试的效率。
本文档旨在向用户介绍VMT导向系统的操作规程,帮助用户正确、高效地使用该系统。
2. 安装与配置在开始使用VMT导向系统之前,用户需先进行系统的安装和配置。
2.1 硬件要求VMT导向系统对计算机硬件有一定要求,推荐配置如下: - 处理器:Intel Core i5 或 AMD Ryzen 5 及以上 - 内存:8GB 及以上 - 存储:至少 100GB 的可用磁盘空间2.2 软件要求用户需要安装以下软件来支持VMT导向系统的正常运行: - 操作系统:Windows 10 或 Linux 发行版 - 虚拟机软件:VirtualBox、VMware Workstation 等 - VMT导向系统软件:从官方网站下载最新版本并进行安装2.3 系统配置在安装完VMT导向系统软件后,用户需要进行一些系统配置以确保系统能够正常工作。
2.3.1 虚拟机配置用户需要创建一个虚拟机并进行一些基本配置: 1. 在虚拟机软件中创建一个新的虚拟机。
2. 选择合适的操作系统类型和版本。
3. 配置虚拟机的内存大小、硬盘空间等参数。
4. 安装操作系统到虚拟机中。
2.3.2 VMT导向系统配置用户需要对VMT导向系统进行一些配置: 1. 运行VMT导向系统软件。
2. 设置虚拟机的路径和名称。
3. 配置虚拟机的网络和存储设置。
4. 完成导向系统的初始化。
3. 系统使用一切配置就绪后,用户可以开始使用VMT导向系统进行软件开发和测试。
3.1 创建项目用户可以通过VMT导向系统创建一个新的项目来管理开发和测试过程: 1. 在VMT导向系统界面中,点击。
VMT隧道导向系统介绍

存储温度 –30 to +70 ° C
10针军用接头,
RS 485
工作温度 - 5 to
+45 ° C
Copyright © 2013 VMT(Shanghai) ALL RIGHTS RESERVED
VMT系统精度
TS15G全站仪距离测量精度 精度 (标准模式) 角度测量精度 激光靶角度 激光点坐标测量精度 角度测量精度 误差,全站仪与激光靶间距150m TCA全站仪距离测量精度 TCA全站仪角度测量精度 激光靶坐标测量精度 误差,盾头至激光靶间距10m 角度测量精度 ±2mm + 2ppm ±1,0 mgon (= ±0,016 mm/m) ±1mm ±1mrad (= ±1mm/m) 2,0mm 2,4mm (1.0mgon*150m/63.662gon) 1,0mm 10,0mm
司声誉的言行保留予以追究其法律责任的权利。
Copyright © 2013 VMT(Shanghai) ALL RIGHTS RESERVED
前言
伴随中国城镇化进程的迅猛发展,工程机械化施工技术水平的日 益提高,隧道掘进机市场正在迅速扩大。自动化导向系统是隧道机械 化施工的重要辅助系统,竞争也随之日趋激烈。 作为掘进机导向系统领域的标杆,VMT始终追求更先进的技术, 更过硬的品质,更优质的服务。
先进的技术 过硬的质量 优质的服务
第二代Xlog_RadioBox
Copyright © 2013 VMT(Shanghai) ALL RIGHTS RESERVED
VMT无线通讯产品
不论是最初的WDC,还是后来的XLog,都完全能够满足现场 测量的距离要求,适应现场的某些极端环境: 先进的技术
盾构施工测量方案复习过程
目录一、VMT导向系统 (1)1、盾构施工的坐标系统 (1)2、定向系统的基本组成与功能 (2)3、定向基本原理 (3)二、盾构机始发掘进阶段测量 (4)1、始发定向测量 (4)2、观测要求及精度 (5)3、盾构机始发托架及反力架安装测量 (7)1)始发托架的高程控制 (7)2)始发托架的平面位置控制 (8)3)始发托架、基准环及反力架的检查 (9)4、始发掘进阶段测量 (9)1)、盾构机姿态人工复测 (10)2)、环片测量 (11)3)、盾构机姿态测量的误差分析 (12)三、隧道洞内施工测量 (12)1、激光站的移站 (12)1)、移站距离的确定 (13)2)、激光站的移站 (14)2、激光站的人工检查 (15)3、洞内精密导线网和水准网的测设 (16)4、盾构机姿态人工复测 (18)5、隧道环片测量 (18)四、贯通误差预计 (19)1.平面贯通误差分析 (19)⑴平面贯通误差的主要来源 (19)⑵各项误差源的分析 (19)⑶平面贯通测量误差预计 (23)2.高程贯通误差分析 (23)(1)高程贯通误差来源 (23)(2)各种误差源的分析 (24)(3)高程贯通误差的预计 (25)五、竣工测量 (25)1、贯通测量: (25)2、竣工验收测量: (26)六、测量技术保证措施 (26)一、VMT导向系统在掘进隧道的过程中,为了避免隧道掘进机(TBM)发生意外的运动及方向的突然改变, 必须对TBM的位置和DTA(隧道设计轴线)的相对位置关系进行持续地监控测量。
TBM能够按照设计路线精确地掘进,则对掘进各个方面都有好处(计划更精确,施工质量更高)。
这就是TBM采用“导向系统”(SLS)的原因。
德国VMT公司的SLS-T系统就是为此而开发,该系统为使TBM沿设计轴线(理论轴线)掘进提供所有重要的数据信息。
1、盾构施工的坐标系统(1)D TA坐标系DTA坐标系是盾构施工坐标系统,它是以线路设计中线为参照的一种三维坐标。
盾构施工测量技术
盾构隧道施工测量技术任何一个盾构测量项目的工作都是围绕这三大要素来展开。
从测量方案的制定到测量过程的实施都是为了如何保证三大要素的质量来最终保证隧道施工的精度。
地铁施工测量按服务性质分类可以分为施工控制测量、细部放样测量(铺轨基标测量)、竣工测量和其它测量等作业。
一、施工控制测量1、地面控制测量:维护施工期间地面的平面、高程主控制网完整,维持其可靠、可用;为施工方便加密地面控制点(包括地面工程、明挖工程的地面中桩)并维持其可靠、可用。
2、联系测量:明挖工程投点、定向,暗挖工程竖井投点、定向,向地下传递高程。
3、地下控制测量:明挖地下中桩体系控制测量,暗挖地下主导线控制测量,明、暗挖工程地下主水准网控制测量,进行分段贯通测量,平差地下平面、高程主控制网,照顾各段工程间的衔接。
贯通后平差确定地下主控制网的坐标、高程。
二、细部放样测量1、建筑物、构筑物的结构和装修工程放样,设备、管网安装工程放样,包括暗挖法中为施工导向,盾构机定位、纠偏和装配式衬砌的拼装等要求而进行的测量作业。
2、精确铺轨要求的测量作业。
重点是控制铺轨基标测设来保证轨道的设计位置和线路参数,同时亦保证行车隧道的限界要求。
三、竣工测量竣工测量主要包括与线路相关的线路结构竣工测量、线路轨道竣工测量、沿线设备竣工测量以及地下管线竣工测量等。
其他测量作业是指为工程前期、后期工作,为工程措施服务的测量作业和控制施工影响的地上、地下及周围建筑物的变形观测等测量作业。
盾构施工测量的主要内容:地面测量控制网的交接桩。
地面测量控制网点复核及加密。
贯通测量技术方案的制订。
联系测量。
地下控制测量(地下主控导线测量、施工导线测量)。
盾构机的导向测量。
竣工测量等等。
贯通误差:地铁的贯通测量是指盾构从始发井始发沿设计线路方向和坡度到达预留洞门贯通。
此时盾构中心与预留洞门中心的偏差即为贯通误差。
贯通误差包括测量误差和施工误差两部份。
地铁隧道的贯通施工影响环节多。
其影响因素主要有:1、地面控制测量误差2、竖井联系测量误差3、地下导线测量误差4、贯通处洞门中心坐标测量误差5、盾构姿态的定位测量误差一、施工测量质量管理目标和基本质量指标(GB50308-2008)(1) 质量指标:在任何贯通面上,地下测量控制网的贯通误差,横向中误差不超过±50mm,竖向中误差不超过±25mm。
盾构(TBM)导向系统

盾构(TBM)导向系统
一、导向系统简介
1、作用
(1)盾构姿态:盾构(TBM)掘进过程中,导向系统连续测量盾构姿
•
五、导向系统使用注意事项
12、贯通前
洞内中线、高程——测量组 全站仪、后视棱镜托架——测量组 导向系统测量结果——测量组 洞门检查——测量组
隧道贯通前,精确调整盾构姿态,提高贯通精度——主司机
六、维护与故障处理
1、导向系统保护
导向系统各部件:激光靶(马达棱镜)、全站仪、棱镜、工业电脑、控 制箱、电台、天线、电池等,是精密的光学、机械、电子仪器,很容易 受到施工现场水、油、浆液、灰尘、震动和机械伤害,主司机和值班工 程师有责任提醒洞内相关人员对导向系统部件注意保护,并给导向系统 提供尽量大的测量窗口。
六、维护与故障处理
2、简单故障排除
一些影响因素可能会使导向系统不能正常工作,可简单排除: • 测量窗口阻挡; • 灰尘大; • • • • 管片旋转; 管片振动; 电缆故障; 电脑故障;
• 注意观察导向系统界面中的一些常用警示信号及其意义,向测量组了 解。
四、管片选型介绍
2、管片选型要素
盾构姿态偏差
B
中线
A 管片计算
C
推进油缸行程
铰接油缸行程
E
D
盾尾间隙
五、导向系统使用注意事项
1、主要职责
导向系统工作状态 测量组 值班工程师
盾构姿态数据 的正确性和精度
VMT导向系统的应用(李松)

VMT导向系统硬件主要由以下几个主要部分组成: 1、激光站(全站仪) 2、黄盒子 3、中央控制箱 4、中央电脑 5、激光靶 6、电缆
各硬件的关系图
1、全站仪
全站仪装配有马达和同轴测距仪,能由电脑完全操控。伺服系统可以保证全站仪精确 转水平和垂直方向,自动识别 ATR 可以精确瞄准所有常见棱镜。而且,全站仪还装配 有GUS74 激光发射装置,发出的激光被调整到跟全站仪视准轴平行,此装置用来激活 激光靶。 使用全站仪要注意的几个问题:
将当前实际的屏幕打印到 Windows 默认打 机。 进入下一级菜单。当前被激活级别显示在下方的右侧。
(3)主屏幕—级别2
• •
F1, TBM 历史记录 F2,TBM图表
显示被存储在数据库里面的TBM姿态录 图示每一环 TBM 的趋向,图中的点表示前参考点
•
• •
F3
F4,打印报告 F5, 管环位置
8. 目标靶信号强度,表示激光打在激光靶上的强度,这个值应该总 是介于 250 和
1000 之间。如果不是,则激光或者激光靶需要擦 干净。浑浊的空气(如柴油机、焊 接所产生的烟等等) 也有可能 减弱激光强度。
9. 激光强度表示当前激光的发射强度,激光靶接收强度和激光强有直接的联系。 10. 电脑上显示的日期及时间 11 通讯状态显示。绿色表示正常工作,黄色表示在等待状态,红色则表示有问题。点击此 符号则 会弹出一个包含当前工作状态信息 的窗口。 12. 项目名称 13. 显示当前程序运行模式(推进,管片拼装)。 14. 预留的显示其他特殊项目信息的地方。 15. 可以通过鼠标或键盘操作这些功能键,详情见后。 16. ―对话窗口” – 信息窗口。下拉滚动条可以使信息上下移动,以便浏览(右侧)。 17. 信息“上一 次姿态确定至今的时间间隔”表示最后一次确定 TBM 姿态是在什么时候
VMT用户操作手册

声明: 本手册为 SLS-T 通用手册。本手册中采用软件操作画面及描述只是为了帮助 读者更好地理解 SLS-T 系统中的各项功能及步骤,由于项目各异,因此我们 并不能保证本手册中的软件操作图片及描述同任何项目都完全符合。VMT 保 留对这些图片进行更新修改的权利。
57
57 58 59
63
63 64 64 65
3
üb VMT GmbH
8.3.2
管片
65
8.4
[<]按钮
66
8.5
纠偏曲线
66
8.6
计算结果[F2]
67
8.6.1
初始值[F4]
67
8.6.2
管环拼装清单
67
8.6.3
管环类型限制符
67
8.7
统计[F3]
68
8.8
初始值[F4]
69
8.8.1
推进油缸
2.2 SLS-T 系统工作原理
为了使大家知道 SLS-T 是怎样工作的,需要知道本系统的工作原理。 下面将介绍系统的工作原理,使大家充分了解 SLS-T 系统是怎样工作的。
2.2.1 Basics 基础
任何测量工作的基础都是坐标系统。SLS-T 采用了 3 种不同的坐标系统。 Global coordinate system 全球坐标系统: 整个工地的测量工作都与这个坐标系 统有关。它用来计算所有的固定点,起点及中间点。工地负责将有关点的坐标( 全球坐标系统)提供给 VMT。这包括有关 DTA 的数据,激光站支架坐标数据等。 TBM Coordinate system TBM 坐标系统:ELS 靶的安装尺寸及 TBM 的控制点与 基准点都需要在本系统中预先计算出来。这些数据都已经由 VMT 公司提前测定。 本系统与 TBM 的轴线有关,它包括并备份有必要进行测量的点。在主控测量中,用 控制点来确定 TBM 的位置。TBM 的位置可通过独立于 SLS-T 程序以外的其它的 转化程序来确定。 DTA System DTA 系统: 在本系统中显示 TBM 前后基准点的里程与偏离值。SLST 的主要目的就是为了确定各相关点的坐标。TBM 的位置总是跟本系统联系在一 起。本坐标系统显示了各相关点的水平/垂直偏离值及里程。
VMT导向系统操作规程
第七章VMT导向系统操作规程目录1VMT简介ﻩﻩﻩﻩﻩﻩ7-3 2SLS-T导向系统ﻩﻩﻩﻩﻩﻩﻩﻩ7-32.1工作原理2.2SLS-T系统组成3盾构测量的五项内容ﻩﻩﻩﻩ7-44盾构机的施工测量ﻩﻩﻩﻩﻩﻩﻩﻩ7-44.1隧道误差分布4.2施工测量5隧道掘进软件的操作ﻩﻩﻩﻩﻩﻩ7-55.1隧道设计线路(DTA)数据的输入和编辑5.2激光全站仪的搬站操作程序5.3盾构机掘进测量5.4盾构机管片安装1.VMT简介VMT是专为隧道开发掘进导向系统和提供测量服务的测量技术公司,成立于1994年,现在主要的产品是SLS-TAPD导向系统。
2.SLS-T导向系统SLS-T APD 导向系统和隧道掘进软件全天侯提供盾构机的三维坐标和定向的连续的动态信息。
2.1.工作原理由激光经纬仪发射出一束可见红色激光束,激光束照射到ELS靶,光束相对于E LS靶的位置已精确测定,水平角是由激光经纬仪照射到ELS靶的入射角决定的.在E LS靶内部安装有一个监测ELS靶倾角和转角的双轴传感器,可以分别测ELS靶的上下倾角(yaw angle)、左右倾角(pitch)和入射点相对于ELS靶的中心线的旋转角(roll)。
激光照射到ELS靶的间距由TCA全站仪的EMD测定。
这样,当测站坐标和后视坐标确定后, ELS靶的方位和坐标就确定下来了。
根据ELS靶的中心和盾构机的主机轴线平面几何关系,就可以确定盾构机的轴线。
再把隧道设计中心线(DT A)的坐标(米/个)输入隧道掘进软件,就可以全天候的动态显示盾构机主机和隧道设计中心线(DTA)的关系。
2.2.SLS—T系统组成2.2.1.激光全站仪(Laser-Theodolite)激光全站仪(Leica TCA1103/ART/GUS64)是同时测量角度(水平和垂直)和距离的测量仪器,并能发射出一束可见红色激光。
LeicaTCA1103激光全站以仪器参数:测角精度:3.3″(1mgon)测距精度:2mm+2ppm2.2.2.黄色盒(YellowBox)主要是为全站仪和激光器提供电源,也连接全站仪和主控室的PC机的通讯。
VMT操作介绍

二级功能键
ESC 中断应用程序和功能 F1 F2,Exit 退出程序 F3 F4,Reports 这个功能用于打印选定的掘进报告 F5,Orientation 设定全站仪方位。这只能在管片安装模式时进行。如想利 用此功能,则转到管片安装模式,再用手(大约10cm)把全站仪转向定好的 参考点,然后按下这个按钮(F5,Orientation)。全站仪将锁定棱镜,随后 可对全站仪的方位进行调整。接着全站仪可以转到由编辑器(激光站、当前 数据)所确定的方向。 F6,Laser Move 通过对话模式,将激光全站仪移向一个新位置。 F7,TBM History 此功能用于从数据库检索储存的TBM 位置。 F8,Delete Ring 永久删除软件数据库中最新安装的管片环资料。 F9,Print 打印当前屏幕。 F10,Next 转到下一个功能级别。
VMT系统操作介绍
一、VMT系统的基本原理 二、VMT的操作介绍 三、VMT的操作中的注意事项
一、VMT系统的基本原理
1、现在的盾构机都装备有先进的自动导向系统, 我们盾构 机上的自动导向系统为德国VMT公司的SLS-T系 统,主要有以下四部分组成:(1)具有自动照准目标的全站 仪。主要用于测量(水平和垂直的)角度和距离、发射激 光束。(2)ELS(电子激光系统),亦称为标板或激光靶 板。这是一台智能型传感器,ELS接受全站仪发出的 激光束,测定水平方向和垂直方向的入射点。坡度和旋 转也由该系统内的倾斜仪测量,偏角由ELS上激光器 的入射角确认。ELS固定在盾构机的机身内,在安装 时其位置就确定了,它相对于盾构机轴线的关系和参数 就可以知道。(3)计算机及隧道掘进软件。SLS-T软 件是自动导向系统的核心,它从全站仪和ELS等通信 设备接受数据,盾构机的位置在该软件中计算,并以数字 和图形的形式显示在计算机的屏幕上,操作系统采用W indows2000,确保用户操作简便。(4)黄色箱子。 它主要给全站仪供电,保证计算机和全站仪之间的通信 和数据传输。
盾构导向系统的使用及保养
⑵PLC为红色:故障可能为从VMT电脑到 PLC之间的连接线有问题,也可能是PLC有 问题,数据无法传输,检查这两个地方。
⑶全站仪显示为红色:故障可能是几个方 面的;
精选ppt
18
4.导向系统的日常故障及处理
• 13.如果在SLS-T软件主界面上的“ELS” 标识变为红色,不能变回,则关闭保险 “8-5F6”,接着将其打开以冲置中央控 制箱当需要时。
• 14.检查管环的位置并跟SLS-T中显示的 位置进行比较每10环
精选ppt
24
4.导向系统的日常保养
• 15.拆光靶后面的插座时,只需要拧动箍 在光靶上的连接环,千万不要蛮力拧接 头。
精选ppt
9
2.盾构导向系统的组成
整个系统的组成 E L S 接 收 靶 情况及各个部件 之间的相互关联 如图所示:
电缆线 激光全站仪
黄盒子
控制盒 电脑 调制解调器
• 图5 系统相互关联图
精选ppt
10
2.盾构导向系统的组成
图六 系统相互关联图
精选ppt
11
ห้องสมุดไป่ตู้
导向系统的组成
精选ppt
12
3.导向系统的使用
• 16.激光站和后视托架必须稳定,不要固 定在不同的管片上。
• 17.如果出现漏浆和漏水现象,及时采取 措施保护全站仪和激光靶。
精选ppt
25
4.导向系统的日常保养
• 18.如果长时间停机,关闭系统电源。 • 19.防止激光靶玻璃屏幕被撞坏,否则水
会进入损坏激光靶配件。 • 20.无论如何不要移动激光靶基座和参考
隧道掘进机VMT导向系统应用及进展

0 引言近年来随着社会的不断发展,许多隧洞掘进施工中,都开始使用隧道掘进机。
在城市中进行使用,可以尽量减少市政的压力(如废水废渣运输以及交通拥堵等),不仅如此,隧道掘进机在水电工程建设施工中也起到了非常重要的作用[1]。
隧道掘进机被形象地称为“鼹鼠”,其功能为在各种土壤与岩层中挖掘隧道,既可用于在富含水分的松软地质,也可用于颗粒状地质条件[2]。
可以完美的胜任各种隧道掘进施工要求。
隧道掘进机最主要的缺点是前期建造成本高,以及长距离运输比较困难。
隧道越长,隧道掘进的高效率带来的效果越明显,隧道钻孔机相对于钻孔和爆破方法的相对成本越低,完工周期也会缩短[3]。
本文探讨了隧道掘进机的发展与应用,介绍了隧道掘进机VMT导向系统基本工作原理,并分析了面临的问题与挑战,为隧道掘进工程提供借鉴。
1 隧道掘进机1.1 隧道掘进机发展及应用隧道掘进机适用于地铁隧道、铁路隧道、公路隧道、引水隧道、矿山巷道等各种隧道工程。
其初始构念始于19世纪初的英国,1818年,英国人马克·伊散姆巴尔德·布鲁内尔(Marc Isambard Brunel)根据蛆虫在船底腐蛀成洞的现象,提出了盾构施工技术,并因此获得了专利。
这一成就标志着隧道掘进技术问世在1853年,美国的埃比尼泽•塔尔博特(Ebenezer Talbot)也为一种结合了威尔逊切割刀盘的隧道掘进机申请了专利,即使用了复合旋转机构改进刀盘结构;在十九世纪70年代,约翰 D勃氏英格兰建造一台使用新式刀盘的隧道掘进机,可以更好地贴近岩石表面,更加有效地进行挖掘。
1875年,法国国民议会批准在英吉利海峡海底修建隧道,同年英国议会批准进行试运行。
该项目选择的隧道掘进机的刀具为安装有切割圆盘的锥形刀盘。
从1882年6月到1883年3月,在这9个月里,共计开掘了1.84千米的隧道。
1.2 掘进机分类根据隧道施工时地质条件的不同,掘进机可以分为硬岩隧道掘进机(Tunnel Boring Machine,TBM)和软岩隧道掘进机(盾构机)。
PPS导向系统学习资料

P P S 导向测量系统PPS---TBM---导向系统关于TBM的指导系统为操作人员说明了刀盘和护盾的位置和方向。
1.启动和主菜单TBM的指导系统随着电脑的启动或重新启动或点击桌面TBM的图标便自动启动。
主要程序将通过启动MS窗口的开始菜单才能被启动。
开始一个新的工程,必须得输入有关隧道和TBM的设置。
所有这些设置都必须得在TBM指导系统的主菜单里设置。
2.菜单2.1 功用在“功用”菜单中可以访问提供的常用程序。
Ms窗口文件管理器Ms窗口计算器Ms窗口编辑器并通过用“退出”按钮停止程序2.2 测量2.2.1 TBM的测量是在标准工作屏下开始的,并初始化显示器(信息窗口)右下方显示的系统内容。
这项操作在设置被操作前和系统所有内容被安装前不能进行运转。
2.2.2 TBM的显示是在显示器上显示最终位置及其数值的一个方法。
2.2.3 测量新的经纬度是给经纬仪创设新位置的一个方法。
为此,在掘进方向必须得安装一个棱镜。
经纬仪测量到参考棱镜以检测方位,然后寻找新的目标(简称ATR)。
并建议使用输出系统零件。
这个过程不能代替隧道横面的测量。
为了确信经纬仪和参考棱镜的正面图两个电动棱镜将被关闭。
经纬仪测量到参考棱镜的I面和II面。
这个内部检查测试了A TR的标定。
如果当地的参考棱镜值在I面和II面之间的差额大于15mm,将会出现“经纬仪标度”的错误信息。
请根据Leica手册指南标定A TR.把参考棱镜移动到新位置,并把经纬仪也翻转到I面的这个方向;结束时按“进入”。
在I 面和II面的测量将会自动操作。
相互交换经纬仪和参考棱镜(把tribrach留在支架上),以便经纬仪在新的位置,而参考棱镜被放置在经纬仪原来的位置上。
把TCA大概旋转到参考棱镜I面的方向上,在I面和II面的方位测量将会自动操作。
新的TBM位置应该非常接近原来的位置。
一个内部检查将允许有5mm的限度。
在比较经纬仪改变前后的TBM位置的这个过程中,建议应停止TBM.2.2.4标度倾斜仪:这只能在TBM的安装过程中做,在那儿必须测量出所有的参数。
VMT导向系统操作指南2.18
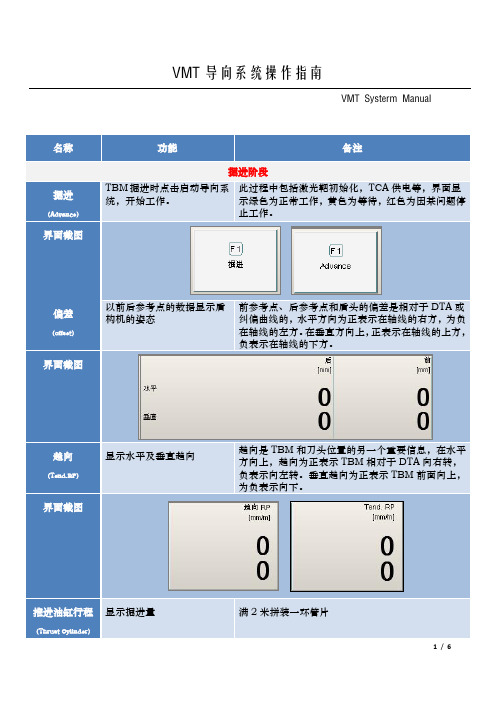
VMT导向系统操作指南
VMT Systerm Manual
以前后参考点的数据显示盾前参考点、后参考点和盾头的偏差是相对于DTA或
负表示在轴线的下方。
趋向是TBM和刀头位置的另一个重要信息,在水平
为负表示向下。
显示盾构机前后参考点在大滚动角【mm/m】正值表示相对于水平面向右滚动;查看已拼装的管片的数据和图表中的数据和管片拼装时的数据相同,只是显示形
经主管工程师和测量工程师共同确定需要换站后,和
包括激光靶的机械坐标、设计尺寸以及油缸伸缩量传一个参数。
随换站后马上进行,无主管工程师和测量主管的同意点击【管片拼装】里的“拼装(Build ring)后环号
在停止测量的前提下,如下图所示,F3进入盾尾间
备注:每测5次管片测量盾尾一次。
超前值是对已拼装的管片的经常工地上期望拼装的管环的前平面和TBM的轴线
为0.00%。
默认设置为50%,可根据实际情况选用。
全部信息。
1、基准管环类型。
当前已安装的最后一环管片的类5
4
3
2
1。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
精品文档
第七章
导向系统操作规程VMT
精品文档.
精品文档
目录
1VMT简介7-3
SLS-T2导向系统7-3
2.1工作原理SLS-T系统组成2.27-4 3盾构测量的五项内容
7-4
盾构机的施工测量4
4.1隧道误差分布 4.2施工测量7-5
5隧道掘进软件的操作
5.1)数据的输入和编辑DTA隧道设计线路(激光全站仪的搬站操作程序5.2盾构机掘进测量5.3
盾构机管片安装5.4
精品文档.
精品文档
1.VMT简介
VMT是专为隧道开发掘进导向系统和提供测量服务的测量技术公司,成立于1994年,现在主要的产品是SLS-T APD 导向系统。
2.SLS-T导向系统
SLS-T APD 导向系统和隧道掘进软件全天侯提供盾构机的三维坐标和定向的连续的动态信息。
2.1.工作原理
由激光经纬仪发射出一束可见红色激光束,激光束照射到ELS靶,光束相对于ELS 靶的位置已精确测定,水平角是由激光经纬仪照射到ELS靶的入射角决定的.在ELS靶内部安装有一个监测ELS靶倾角和转角的双轴传感器,可以分别测ELS靶的上下倾角(yaw angle)、左右倾角(pitch)和入射点相对于ELS靶的中心线的旋转角(roll)。
激光照射到ELS靶的间距由TCA全站仪的EMD测定。
这样,当测站坐标和后视坐标确定后, ELS靶的方位和坐标就确定下来了。
根据ELS靶的中心和盾构机的主机轴线平面几何关系,就可以确定盾构机的轴线。
再把隧道设计中心线(DTA)的坐标(米/个)输入隧道掘进软件,就可以全天候的动态显示盾构机主机和隧道设计中心线(DTA)的关系。
2.2.SLS—T系统组成
2.2.1.激光全站仪(Laser-Theodolite)
激光全站仪(Leica TCA1103/ART/GUS64)是同时测量角度(水平和垂直)和距离的测量仪器,并能发射出一束可见红色激光。
LeicaTCA1103激光全站以仪器参数:
测角精度:3.3″(1mgon)
测距精度:2mm+2ppm
2.2.2.黄色盒(YellowBox)
主要是为全站仪和激光器提供电源,也连接全站仪和主控室的PC机的通讯。
2.2.
3.电缆卷筒(Cable Drum)
当盾构机向前推进时。
激光全站仪和安装在盾构机上的其他设备间的距离会增大,因此需要用带有滚动装置的电缆卷筒。
2.2.4.ELS 靶
ELS(electronic laser system) 靶用来接收激光束。
由它来决定入射点的水平和垂直方向。
只有当入射光的入射角垂直于ELS 靶里安装的参考平面(reference
plane)时,入射光才可以被接收。
参考平面上布满传感元件,可以传递入射角的上下倾角(yaw angle)、左右倾角(pitch)和入射点对于ELS靶的中心线的旋转角(roll)。
2.2.5.工业计算机(Industrial PC)
由隧道掘进软件计算所有的数据,并用图表和数字表格两种形式显示在监视器
精品文档.
精品文档
上,使 TBM的位置一目了然。
2.2.6.隧道掘进软件(Tunnel Advance Software)
隧道掘进软件是SLS-T APD的核心。
通过其附带的通信装置接收数据。
由隧道掘进软件计算盾构机的方位和坐标,并以图表和数字表格显示出来。
在S-179和
S-180两台盾构机上使用的是触摸式屏幕及操作系统为Windows的隧道掘进软件。
2.2.7.控制盒(Conteol Box)
控制盒连接系统的各种传感器,并将这些输出合适的项目输入到工业计算机内。
来自工业计算机的控制信号也可以转换到传感器上。
2.2.8.调制解调器(Modem)
通过现场安装的电话线经调制解调器可以把盾构机的位置动态的传递到主控室
和地面办公室,形成一个小局域网,地面上可以随时知道盾构机的状态。
2.2.9.TBM-PLC
盾构机的数据是从程序逻辑控制器(PLC)输入的。
PLC独立于SLS-T自动定位
系统。
S-179和S-180两台盾构机的PLC是Siemens S5。
2.2.10.盾尾间隙自动测量[SLUM]控制器单元
最新安装管片和盾构机的盾尾之间的间隙由安装在管片安装机区域的仪器测得。
VMT提供的控制器单元连接由安装在安装机区域的仪器所测的测量结果和工业
计算机内的管片选择软件组成。
测量盾尾间隙的仪器是由Leica公司制造的手持式测距仪。
当测距仪发射出的激光照射到管片和盾壳内侧时,就可以直接读出他的距离。
3.盾构测量的五项内容:
3.1.建立控制网
3.2.竖井联系测量
3.3.建立地下水平控制网和高程控制网
3.3.1.控制测量
3.3.2.盾构机的掘进测量
3.4.施工检查控制测量
3.5.其他设备的放样
4.盾构机的施工测量
4.1.隧道误差分布
盾构机掘进误差±60mm
管片误差(管片的制作、安装、变形)±40mm
测量误差±50mm
总计±150mm
4.2.施工测量
4.2.1.盾构机定位前的测量工作
精品文档.
精品文档
主要是通过竖井联系测量传递到地下两个导线点及高程。
此工作非常重要,他确定盾构机的初始定位和掘进质量。
竖井水平联系测量可采用悬垂法加测方位角(陀螺经纬仪测量方位角)和激光投点仪进行投点。
竖井高程联系测量主要是用钢尺悬挂法传递高程。
4.2.2.盾构机的始发定位测量
4.2.2.1.出发支架的定位
根据出发支架是间距和尺寸分别计算出各个支架的里程端点坐标和每个圆弧的5个高程进行放样。
4.2.2.2.始发定位
精确测定盾构机主机两个断面的直径。
精确测定盾构机零参考面的5—8个点的坐标,使其零参考面位于里程和标高,盾构机零参考面和始发里程会吻合。
精确测定ELS 靶中心与盾构机中心的关系。
4.2.2.3.激光全站仪的搬站
由于只有当激光束垂直于ELS 靶屏幕时,入射光方为有效,而ELS 靶里面的感光屏幕的角度参数是有一定限制的,如下所示
旋转角 (Max.roll)±40°
上下倾角 (Max.yaw angle)±5°
左右倾角 (Max.pitch)±15°
所以激光全站仪的位置在曲线上不能与ELS 靶距离太长,一般为50到80米,在直线段与洞内环境有关系,直线段一般为120米到150米。
5.隧道掘进软件的操作
5.1.隧道设计线路(DTA)数据的输入和编辑
主要依据盾构机的起始里程和各个曲线要素、竖曲线要素、坡度计算隧道设计路线的三维坐标(个/米)。
隧道设计线路编辑是把线形(直线、曲线、螺旋线)、曲线半径、角度偏差、长度等输入。
5.2.激光全站仪的搬站操作程序
1)盾构机停止掘进和管片安装。
点击Survey Off、Laser Move、)2F2。
TCA后视检查。
3)输入新的距离(Chainage)。
4)测量新的坐标。
5)搬站。
)6
输入新的坐标点。
) 7TCA后视定位。
)8 靶。
)9ELS转向TCA精品文档.
精品文档
5.3.盾构机掘进测量
1)点击Survey off
点击)Adance 2ELS)3键变绿。
盾构机进入掘进状态,盾构机掘进位置图表出现。
4)5.4.盾构机管片安装1)点击Survey off
点击Ring Erection 2)Ring Erection 变绿3))4盾构机进入管片安装状态,盾构机管片安装位置图出现精品文档.。