空间轴对称问题的基本微分方程
第4章 轴对称问题和空间问题有限元法
(1 )(1 2) 1 1
1
0
0
0
0
1 2 2(1 )
7
轴对称单元的特点(与平面三角形单元的区别)
轴对称单元为圆环体,单元与单元间为节圆相连接;
节点力与节点载荷是施加于节圆上的均布力;
单元边界是一回转面;
应变分量 中出现了 ur r ,即应变不是常量;
且应变矩阵在r→0时,存在奇异点,需特殊处
由于几何矩阵中的元素不是常量,单元刚度矩阵需要通过积分得到,
为简化计算可以用三角形单元形心位置的坐标 rc , zc代替 B 矩阵中的变
量 。r, z
rc
1 3
(ri
rj
rm )
zc
1 3
(
zi
zj
zm )
实践证明采用近似积分也能达到一定的精度,具体对于三角形环单元
用形心处坐标代替应变矩阵中的坐标变量。
uj wj
N
q
um
wm
单元应变:
将单元位移函数代入几何方程得:
u r
1 2A (biuiBiblioteka bju jbmum )
u r
1 2A
(
fi
ui
f
ju j
f mum )
11
其中,
fs
as r
bs
cs zs r
(s i, j, m)
w z
1 2A
(ci
wi
cjwj
cmwm )
u z
1 2A (ciui
Fe
Fir
Fiz
=
2A
15
9rc2
0
2ri2
rjrm
(3) 分布面力移置
FEA-05-轴对称及空间问题

北京科技大学数理学院应用力学系第五章轴对称及空间问题本章重点和应掌握的内容1、轴对称问题的基本方程及其有限元列式2、空间问题的有限元列式和一些常用单元3、ANSYS分析中需要考虑的一些因素物体的几何形状约束情况及所受的外力§5.1 轴对称问题有限元法物体的几何形状、约束情况及所受的外力都对称于空间的某一根轴,则在物体中通过该轴的任何平面都是对称面,所有应力、应变和位移也对称于该轴,这类问题称为轴对称问题。
研究轴对称问题时通常采用圆柱坐标系(r,θ,z),以z轴为对称轴。
由于对称性,轴对问题共有4个应力分量:[]{}Tr z zr θσσσστ=σ其中r 表示沿半径方向的正应力,称为径向应力;θσ表示沿θ方向的正应力,称为环向应力或切向应力;表示沿z方向的正应力称为轴向应力;z σ表示沿z方向的正应力,称为轴向应力;zr τ表示在圆柱面上沿z方向作用的剪应力。
[]{}Trz zr θεεεεγ=同样,轴对称问题共有4个应变分量:在轴对称问题中,弹性体内任意一点上,不存在切向位移,只节点两个位移分量基本,。
因此,节点两个位移分量基本在子午面上离散成平面的要求完全相同一、轴对称问题的几何方程三角形单元网格⎪⎫⎪⎧∂∂r u ⎪⎪⎪⎬⎪⎪⎪⎨=⎪⎪⎬⎫⎪⎪⎨⎧r ur εεθ⎪⎪⎪⎪⎪⎪∂∂∂∂⎪⎪⎭⎪⎪⎩w u z w zr z γε⎪⎭⎪⎩∂+∂r z⎫⎧i u 位移模式与平面问题三节点单元相同⎭⎬⎩⎨=i i w a ⎤⎧位移模式与平面问题三节点单元相同,即:em jim j ia N N N N N N w u u ~000~~~⎥⎦⎢⎣⎡=⎪⎭⎪⎬⎫⎪⎩⎪⎨=1)(2z c r b a AN i i i i ++=[]eT rzzraN L u L ~~~~~~==εγεε=εθ,,r z rz θεεγε径向应变轴向应变面内切应变;环向应变为导出量。
[][]ee m jiemjiaB a B BBa NNNL ~~~~~~~~~~~===0r ∂⎡⎤⎢⎥∂~0001i i i i i b N c a c z u z ⎢⎥⎡⎤∂⎢⎥⎢⎥⎢⎥∂⎢⎥===~,,,220~i i i ii iL B f A b c b r A r r r z r f θε===++⎢⎥⎢⎥∂∂⎢⎥⎢⎥⎢⎥∂∂⎣⎦10r⎢⎥⎢⎥⎣⎦是环向应变,非常量。
空间轴对称问题

空间轴对称在三维几何、建筑设计、工程学等 领域中具有重要的应用。
03 空间轴对称问题的分类
点对称问题
定义
点对称是指一个图形关于某一点 对称,即对于图形上的任意一点,
都存在一个关于该点对称的点在 图形上。
性质
点对称图形的任意两点关于对称中 心对称,且对称中心到两点的距离 相等。
• 推动相关领域的进步:空间轴对称问题在物理、化学、工程等领域也有广泛的 应用。对其进行研究不仅有助于解决这些领域中的实际问题,还能推动相关领 域的进步和发展。例如,在物理学中,空间对称性对于理解基本粒子和相互作 用具有重要意义;在化学中,分子的空间对称性与其物理和化学性质密切相关 ;在工程领域,利用空间对称性可以优化结构设计和提高工程效率。
• 揭示自然现象的内在规律:许多自然现象都表现出一定的空间对称性。对这些 现象进行研究有助于揭示其内在规律,并加深我们对自然界的认识和理解。例 如,在晶体学中,晶体的结构往往具有高度的空间对称性,这种对称性不仅决 定了晶体的物理和化学性质,还反映了晶体形成过程中的内在规律。
THANKS FOR WATCHING
未来研究方向探讨
深入研究复杂图形的空间对称性
目前对于简单图形的空间对称性已有较深入的研究,但对于复杂图形(如分形、不规则图 形等)的空间对称性仍需进一步探讨。
拓展空间轴对称问题的应用领域
除了在数学领域的研究外,空间轴对称问题在物理、化学、工程等领域也有广泛的应用前 景。未来可以进一步拓展其应用领域,并探索其在解决实际问题中的潜力。
感谢您的观看
坐标法
01
02
03
建立坐标系
根据题目条件,选择合适 的点作为坐标原点,建立 空间直角坐标系。
《弹塑性力学》第九章空间轴对称问题

80%
物理方程
描述了材料在不同应力状态下表 现出的物理性质。
塑性力学的基本方程
流动法则
描述了塑性应变与应力之间的 关系。
屈服准则
描述了材料屈服的条件,即应 力达到屈服点时的状态。
强化准则
描述了材料在塑性变形过程中 的应力增强机制。
空间轴对称问题的边界条件和初始条件
边界条件
描述了物体在边界上的受力状态和位 移约束。
如旋转机械、航空航天器等的 设计和分析。
土木工程
如桥梁、高层建筑等大型结构 的分析。
石油工程
如油藏模拟、油气管道设计等 。
核工程
如核反应堆、核废料处理设施 等安全评估。
02
空间轴对称问题的数学模型
弹性力学的基本方程
80%
平衡方程
描述了物体内部各点的受力平衡 状态。
100%
几何方程
描述了物体在受力后产生的形变 和位移。
近原问题的解。
在处理空间轴对称问题时,有限元法能 够将复杂的空间几何形状和边界条件简 化为易于处理和计算的离散模型,从而
提高求解效率。
有限元法在空间轴对称问题中广泛应用 于弹性力学、塑性力学等领域,能够得
到高精度的数值解。
有限差分法在空间轴对称问题中的应用
有限差分法是一种将偏微分方程离散化为差分方程的方法,通过求解差分方程来逼近原问题
目
CONTENCT
录
• 空间轴对称问题的基本概念 • 空间轴对称问题的数学模型 • 空间轴对称问题的解析解法 • 空间轴对称问题的数值解法 • 空间轴对称问题的实验研究
01
空间轴对称问题的基本概念
定义与特性
定义
空间轴对称问题是指物体在空间中关于某一直线或平面对称分布 的问题。
空间与轴对称问题有限元分析课件

02
CATALOGUE
有限元分析基础
有限元分析的基本概念
有限元分析是一种数值分析方法,通过将复杂 的物理系统离散化为有限个简单元(或称为元 素)的组合,以求解复杂系统的物理行为。
它基于变分原理和加权余量法,通过数学模型 将实际工程问题转化为数学问题,从而得到近 似的数值解。
有限元分析广泛应用于工程领域,如结构分析 、流体动力学、电磁场等。
求解线性方程组
通过求解线性方程组得到每个节 点的位移和应力等物理量。
有限元分析的常用软件
ANSYS
功能强大的有限元分析软件,适用于各种工 程领域。
COMSOL Multiphysics
多物理场有限元分析软件,适用于模拟复杂 的多物理场耦合问题。
ABAQUS
专业的有限元分析软件,广泛应用于结构分 析、流体动力学等领域。
空间与轴对称问题有限元分析的优缺点
01
数值误差
有限元分析依赖于离散化的网格 ,存在数值误差,可能影响结果 的精度。
建模难度
02
03
计算资源需求
对于复杂问题的建模,需要较高 的专业知识和技巧,建模难度较 大。
对于大规模问题,有限元分析需 要大量的计算资源,如内存和计 算时间。
未来发展方向与挑战
优化算法
建筑领域
建筑设计中的对称和均衡问题需要考虑空间对称 性,以提高建筑的美观性和稳定性。
机械工程领域
机械零件的形状和结构需要考虑轴对称性,以确 保零件的稳定性和可靠性。
空间与轴对称问题的解析方法
解析法
通过数学公式和定理推导出问题的解 ,适用于简单的问题和特定条件下的 求解。
有限元法
将问题分解为有限个小的单元,通过 求解每个单元的近似解来逼近原问题 的解,适用于复杂的问题和不规则区 域的处理。
空间直角坐标系对称问题
空间直角坐标系对称问题空间直角坐标系对称问题绪论在数学和物理学领域中,空间直角坐标系是一种重要的工具,用于描述三维空间中的点和向量。
它是由三个互相垂直的坐标轴组成,分别是x轴、y轴和z轴。
当我们在空间中进行几何分析时,我们经常需要考虑对称性问题。
本文将探讨空间直角坐标系中的对称性问题,旨在帮助读者更深入地理解这一概念。
一、空间直角坐标系的基本概念1. 空间直角坐标系的定义空间直角坐标系是三维笛卡尔坐标系的一种形式,用于表示点在三维空间中的位置。
它由三个彼此垂直的坐标轴组成,分别是x轴、y轴和z轴。
点在空间中的位置可以由这三个轴上的坐标来确定,例如(x, y, z)。
2. 空间直角坐标系的性质空间直角坐标系具有以下性质:- 坐标轴相互垂直。
- 坐标轴上的单位长度相等。
- 坐标轴的正方向可以任意选取。
二、空间直角坐标系的对称性1. 对称变换对称变换是指将一个点或物体关于某个中心对称地移动到与其在空间中的相对位置相同的另一个位置的变换。
在空间直角坐标系中,我们可以考虑三种类型的对称变换,分别是关于x轴、y轴和z轴的对称变换。
2. 对称性的定义在空间直角坐标系中,当一个点或物体关于坐标轴对称时,我们称之为轴对称。
具体而言,如果一个点或物体关于x轴对称,我们称之为关于x轴的轴对称;如果关于y轴对称,我们称之为关于y轴的轴对称;如果关于z轴对称,我们称之为关于z轴的轴对称。
3. 对称性的性质对称性具有以下性质:- 对称性是一种保持形状和结构不变的属性。
- 对称性可以简化问题的分析和解决。
- 对称性可以帮助我们发现隐藏的规律和关系。
三、空间直角坐标系对称问题的应用1. 几何图形的对称性在几何学中,我们经常研究各种几何图形的对称性质。
正方形在空间直角坐标系中是关于x轴和y轴对称的,而立方体是关于x轴、y轴和z轴对称的。
通过研究几何图形的对称性,我们可以得到它们的性质和特征。
2. 物理问题的对称性在物理学中,对称性是一种非常重要的概念。
轴对称与空间问题

上一页 下一页 返回
6.1 轴对称问题
• 整体刚度矩阵为: • 于是式(6.49)便可以写成与平面问题相同的标准形式,即: • 这就是求解得到的节点位移的平衡方程。
上一页 下一页 返回
6.1 轴对称问题
• 整体刚度矩阵也可以写成分块形式,即:
上一页
返回
6.2 四面体单元
• 工程结构一般都是立体的弹性体,当受到力的作用后,其内部各点将 沿x、y、z 坐标轴的方向产生位移,即三维空间问题,空间问题所选 用的单元形状如图6.7 所示。
上一页 下一页 返回
6.1 轴对称问题
• 即: • 其中 • 且单元内任意一点的位移与节点位移之间有如下关系:
上一页 下一页 返回
6.1 轴对称问题
• 因此有: • {δ *}e 为任意列向量,所以有: • 式(6.31)中的第一项为环单元上的集中力移置到节点的等效力,第
二项为环单元边界上的表面力移置到节点的等效力,第三项为环单元 上的体积力移置到节点的等效力。
6.2 四面体单元
• 6.2.2 四面体单元应变
• 四面体单元应变为:
• 将单元位移代入上式,得:
上一页 下一页 返回
• 其中
6.2 四面体单元
上一页 下一页 返回
6.2 四面体单元
• 6.2.3 四面体单元应力
• 为求单元应力,由四面体单元的物理方程式可得: • 则应力分量为: • 应变分量为:
• 轴对称问题的几何方程(应变与位移之间的关系)为:
上一页 下一页 返回
6.1 轴对称问题
• 写成矩阵形式为:
上一页 下一页 返回
6.1 轴对称问题
• 根据胡克定律,其应力与应变的关系为:
第八章弹性力学问题一般解·空间轴对称问题
所求问题的边界条件给定的是边界上的位移 ui ui,则可直接进行计算。 如果全部边界或部分边界上给出的是应力边界条件, ij l j F i 就要将应力 形式的边界条件转换成为位移形式。 其方法与将应力形式的平衡方程转化为Lame方程的方法大致相同。现推导如 下:先后将式(4-6)、式(4-2)代人式(4-13)得 E E ij ij e ij ij e 2G ij (4 6) (1 )(1 2 ) (1 )
将 2G 换成 , E 来表示,则位移解答为
显然最大位移发生在边界上,由式(8-7)可知
将式(8-7)代入几何方程(4-2)求出应变,再引用式本够方程(4-6)可得应力分量解答
x y
1
( q pz ), z ( q pz ), xy yz zx 0
采用半逆解法。由于载荷和几何形状都对称于z 轴,则各点位移只在z向有变化。试假设
于是 而
因此由Lame方程式(8-3)的前两式知,它们成为恒等式自然满足,而第三式给出
式中A、B为积分常数。 边界上
边界条件式(8-6)前两式自然满足,
lx l y 0
lz 1
u u u u v w lx ly lz ) G ( lx ly lz ) x y z x x x v v v u v w F y el y G ( lx ly lz ) G ( lx ly lz ) x y z y y y w w w u v w F z el z G ( lx ly lz ) G ( lx ly lz ) x y z z z z F x el x G (
利用式(4-5),式(1)中 简化后得
Hertz理论

按照Hertz假设,接触区域的压力分布是半球体 形式的,这样接触中心的压力最大,为q0,其
位置在接触中心O处。所以接触区的压力 分布q的积分可以表达为(见图4):
q0 q ds a F F
a 2
2
r sin
2 2
式中F是虚线半圆的面积,a 是接触圆半径。 积分表达式是把接触压力沿弦 mn 进行积分, 可以求得。 将上述方程代入到方程(19)式,得:
Hertz弹性接触理论
1. 2. 3. 4. 5.
弹性力学基础理论
空间轴对称问题的基本微分方程
空间轴对称问题
弹性接触问题(Hertz弹性接触理论) 一般接触问题
弹性力学的应力与应变关系
在弹性力学中假设物体是均匀、连续、 和各向同性的,应力和应变的关系只决 定于物体的物理性质,所以弹性力学与 塑性力学的主要区别主要是应力和应变 的关系定性。
Hertz假设接触表面的压应力分布为半椭 圆体。 (3)、静力平衡方程:根据接触表面压 应力分布规律求得表面接触压力所组成 的合力应等于外加载荷。 将上述三方面的方程表达式联合求 解,即可求得各种接触问题的公式。
现推导两个球体弹性接触时的公式。 设两圆球体的半径分别为R1、R2 。开 始时在公切平面上的0点相互接触,如 图3所示。
方向的应变,则有:
x = [x - (y +z )]/E
同理可以得到 y轴和 z轴方向的应变。
剪应变与剪应力的关系
同样的方法可以得出剪应变与剪应力的 关系表达式:
xy =
xy
/G
式中G为剪切弹性模量。
第九章_空间轴对称问题
q r a z a a
θ
r
ψ M dψ
r
s
ds s2
s1
3.1 边界上一点 M 的竖向位移 w:
M 点可以在荷载圆面积之外也可在之内。
1.设 M 点为圆面积之外: 设 点为圆面积之外: 当半空间体边界上受法向集中力 P 时,边界上距 P 点为 r 的点
竖向位移为
(1 − ν ) P (1 − ν 2 ) P w= = 2πGr πEr
γ rz=γzr
1.2 基本方程: 基本方程: 1.平衡微分方程 平衡微分方程(两个) : 平衡微分方程 第一
∂σ r ∂τ zr σ r − σ θ + + + fr = 0 r ∂r ∂z ∂τ zr ∂σ z τ zr + + + fz = 0 r ∂r ∂z
第三 2.几何方程 几何方程(四个) ε r = : 几何方程
(9-18)式,称为 Boussinesq 问题解 问题解。 称为
由 P.297(9-17)(9-18)式见:位移和应力随 R 的增加而 、
减小。在 z=0 平面上
ur = −
P
r
(1 − ν ) P (1 − 2ν ) P ,w = 2πGr 4πGr
z
第三节
半空间体在边界上受法向分布力 q
已知条件: 已知条件:半空间体在边界上受均布法向荷载 q 作用,在半径 为 a 的圆面积,寻求解答: 1. z =0 边界上的沉陷 wz=0 = ? 2. r =0(对称轴)上的应力和位移。 求解方法: 采用叠加法和半空间体边界受法向集中力 P 的计算结 求解方法: 果求解。
圆面积均布荷载 q 对圆外 M 点竖向位移影响可取一个微面元, 距 M 点为 s,角度为 ψ处,dA=sdψds ,dA 上 q 对 M 点影响:
弹性力学第八章 空间问题的解答
问题描述:
F
半空间体,体力不计,在水平面上受法
向集中力 F ,建立如图所示坐标系。
0
z
R
•
z 图:8-3
因为要用到位移势函数,不讲了,具体的推导过程见《弹性力学》 第三版,许芝伦。
弹性力学简明教程
NORTHEASTERN UNIVERSITY
§8-4 按应力求解空间问题
z
xy z
yz x
xz y
2
2 z xy
(8-11)
弹性力学简明教程
NORTHEASTERN UNIVERSITY
§8-4 按应力求解空间问题
将物理方程(7-12)带入相容方程(8-10)和(8-11)
1
2 y z2
2 z y2
2
z2
2 y2
2 1
2
yz
yz
(c)
A zy
dxdy
z0
Afydxdy0
(d)
A
yzx xzy
dxdy
z0
A yfx xfy dxdyM (e)
(c),(d),(e)在任意横截面上都满足。
把(8-15)代入(c)
AzxdxdyAydxdy dxydysBAdx0
弹性力学简明教程
NORTHEASTERN UNIVERSITY
fz z
1 2 y
2 y2
1 1
2
fy
y
fz z
fx x
1
2 z
2 z2
1 1
2
fz
z
fx x
fy
y
1
2
yz
第九章_空间轴对称问题资料
距接触点z轴为r的
两球表面上M1和M2点的z
坐标分别为(M1和M2与点o很近)
,
,则
在已知P压力作用下,两球在接触点附近发生变形有一个接触面,根据对称性接触面为以a为半径的圆。
1.a为待求量,同时接触面上有接触压力q(待求),由于接触问题是局部变形,在球体远离o点的任意点位移为刚体位移。
2.两球内距o点很远处的相对位移(刚体位移)为?
下面要建立(找出)三个条件(几何、物理、平衡方程)寻求a、q和。
求解:首先根据接触面变形(位移)来建立一个关系
球1接触面上o点、M1点沿z1轴位移为w1(o)、w1,
而w1(o)=w1+ z1
球2接触面上o点、M2点沿z1z2轴位移为w2(o)、w2,
3.存在物理量:fr、fz、ur、w、r、、z、rz=zr、r、、z、rz=zr
1.2基本方程:
1.平衡微分方程(两个):第一
第三
2.几何方程(四个): , , ,
3.变形协调方程(四个)
4.物理方程(四个):
r=e2Gr、=e2G、z=e2Gz、rz=Grz
其中 ——体积应变
或 , ,
,
5.边界条件
在z=0且r0边界上,z=0自然满足。
在z=0且r0边界上,zr= 0(1-2)A1+A2= 0——(a)
还需一个条件(包括P的)。
在z= z00平面上,
要求z的合力与P平衡。
将z表达式代入,得
而 ,
P - 4A1(1-)- 2A2= 0 ——(b)
由式(a)、(b)解得
A1=P/(2)、A2= -(1-2)P /(2)
2.弹性体变形后的接触面为非常小的局部区域(相对于弹性体几何尺寸)所以可看成半空间(半无限平面)体法向受局部分布力作用问题,但这里分布力q不是均匀的,同时q也未知,接触面的局部区域也是未知的。
空间问题的解答

u 1 2
E z 1
u z 1 2 z
z
u u z E 2(1 ) z
即得按位移求解空间问题的基本微分方程:
u 1 E 2 u 2 f 0 2(1 ) 1 2 1 E 2 uZ f z Leabharlann 2(1 ) 1 2 z
2 f x f z 2 1 1 zx zx z x f y f x 2 2 1 1 xy xy x y
称其为米歇尔相容方程。
x yx zx fx 0 y z x y zy xy fy 0 z x y xz yz z fz 0 z x y
2 2 2 2 2 2 2 x y z
y
2
z v w v w 2 2 2 2 z y yz zy yz z y
2 3 3 2
将几何方程第四式代入,得
y
2
z yz 2 2 z y yz
2 2
(a)
u x x v y y w z z
u z z u
u
2
1 2 2 z
2 2
§8-2 半空间体受重力及均布压力 半空间体,单位体积的质量为 ,在水平边界 上受均布压力 q ,位移边界条件为:w z h 0 求位移分量和应力分量。 解:体力:f x f y 0, f z g 面力: z 0 : f x f y 0, f z q 位移:u v 0, w w( z )
空间轴对称问题的基本微分方程
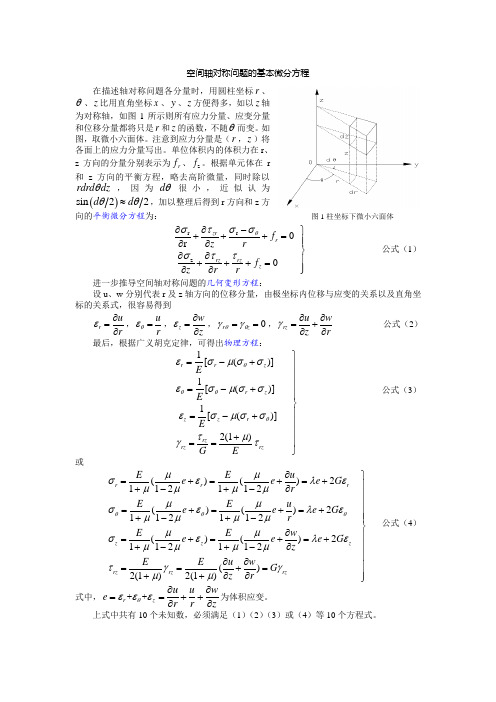
空间轴对称问题的基本微分方程在描述轴对称问题各分量时,用圆柱坐标r 、θ、z 比用直角坐标x 、y 、z 方便得多,如以z 轴为对称轴,如图1所示则所有应力分量、应变分量和位移分量都将只是r 和z 的函数,不随θ而变。
如图,取微小六面体。
注意到应力分量是(r ,z )将各面上的应力分量写出。
单位体积内的体积力在r 、z 方向的分量分别表示为r f 、z f 。
根据单元体在r和z 方向的平衡方程,略去高阶微量,同时除以rdrd dz θ,因为d θ很小,近似认为()sin 22d d θθ≈,加以整理后得到r 方向和z 方向的平衡微分方程为: 图1柱坐标下微小六面体r r z 0r 0zr r rz rz z f z rf z r r θστσσσττ∂∂-⎫+++=⎪⎪∂∂⎬∂∂⎪+++=⎪∂∂⎭公式(1) 进一步推导空间轴对称问题的几何变形方程:设u 、w 分别代表r 及z 轴方向的位移分量,由极坐标内位移与应变的关系以及直角坐标的关系式,很容易得到r u r ∂∂=ε,r u =θε,z w z ∂∂=ε,0==z r θθγγ,rw z u rz ∂∂+∂∂=γ 公式(2) 最后,根据广义胡克定律,可得出物理方程:1[()]1[()]1[()]2(1)r r z r z z z r rz rz rz EEEG E θθθθεσμσσεσμσσεσμσστμγτ⎫=-+⎪⎪⎪=-+⎪⎬⎪=-+⎪⎪+==⎪⎭公式(3) 或 ()()2112112()()2112112()()2112112()2(1)2(1)r r r z z z rz rz rz E E u e e e G r E E u e e e G r E E w e e e G z E E u w G z rθθθμμσελεμμμμμμσελεμμμμμμσελεμμμμτγγμμ∂⎫=+=+=+⎪+-+-∂⎪⎪=+=+=+⎪+-+-⎪⎬∂⎪=+=+=+⎪+-+-∂⎪∂∂⎪==+=⎪++∂∂⎭ 公式(4) 式中,r z u u w e r r z θεεε∂∂==++∂∂++为体积应变。
第七章_空间轴对称问题
(李遇春编)
第七章
空间轴对称问题
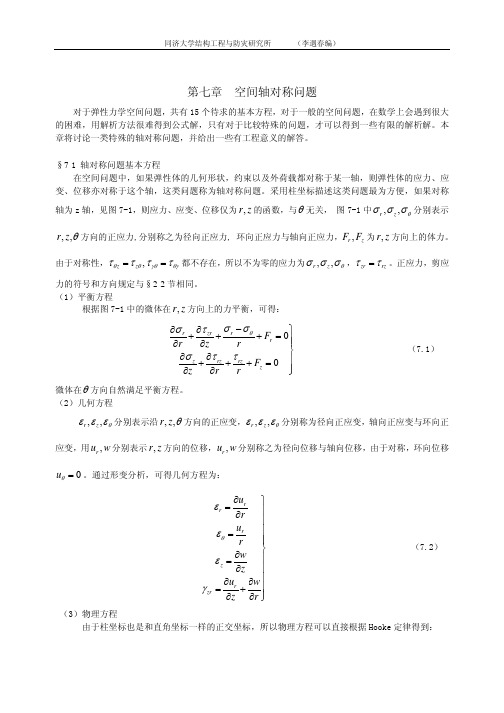
对于弹性力学空间问题,共有 15 个待求的基本方程,对于一般的空间问题,在数学上会遇到很大 的困难,用解析方法很难得到公式解,只有对于比较特殊的问题,才可以得到一些有限的解析解。本 章将讨论一类特殊的轴对称问题,并给出一些有工程意义的解答。 §7-1 轴对称问题基本方程 在空间问题中,如果弹性体的几何形状,约束以及外荷载都对称于某一轴,则弹性体的应力、应 变、位移亦对称于这个轴,这类问题称为轴对称问题。采用柱坐标描述这类问题最为方便,如果对称 轴为 z 轴,见图 7-1,则应力、应变、位移仅为 r , z 的函数,与 θ 无关, 图 7-1 中 σ r , σ z , σ θ 分别表示
应变,用 ur , w 分别表示 r , z 方向的位移,ur , w 分别称之为径向位移与轴向位移,由于对称,环向位移
uθ = 0 。通过形变分析,可得几何方程为:
∂ur ⎫ ⎪ ∂r ⎪ ur ⎪ εθ = ⎪ r ⎬ ∂w ⎪ εz = ⎪ ∂z ∂u ∂w ⎪ γ zr = r + ⎪ ⎪ ∂z ∂r ⎭
σr =
∂ ⎛ 2 ∂2 ⎞ ⎜ v∇ − 2 ⎟ψ ∂z ⎝ ∂r ⎠
(7.9)
作为求解时的参考,将能够满足(7.8)式的双调和函数列出如下:
(7.10) 其中 R =
r 2 + z 2 ,上式中各项的线性组合也满足双调和方程(7.8)式。
§7-3 半无限体表面受法向集中力问题(不计体力) 图 7-2 为轴对称问题,根据量纲分析,取(7.10)式的双调和函数的线性组合作为 Love 位移函 数:
将(7.7)式代入(7.5)式,其中第一式自动满足,第二式变为:
空间轴对称问题的基本微分方程
空间轴对称问题的基本微分方程在描述轴对称问题各分量时,用圆柱坐标r 、θ、z 比用直角坐标x 、y 、z 方便得多,如以z 轴为对称轴,如图1所示则所有应力分量、应变分量和位移分量都将只是r 和z 的函数,不随θ而变。
如图,取微小六面体。
注意到应力分量是(r ,z )将各面上的应力分量写出。
单位体积内的体积力在r 、z 方向的分量分别表示为r f 、z f 。
根据单元体在r和z 方向的平衡方程,略去高阶微量,同时除以rdrd dz θ,因为d θ很小,近似认为()sin 22d d θθ≈,加以整理后得到r 方向和z 方向的平衡微分方程为: 图1柱坐标下微小六面体r r z 0r 0zr r rz rz z f z rf z r r θστσσσττ∂∂-⎫+++=⎪⎪∂∂⎬∂∂⎪+++=⎪∂∂⎭公式(1) 进一步推导空间轴对称问题的几何变形方程:设u 、w 分别代表r 及z 轴方向的位移分量,由极坐标内位移与应变的关系以及直角坐标的关系式,很容易得到r u r ∂∂=ε,r u =θε,z w z ∂∂=ε,0==z r θθγγ,rw z u rz ∂∂+∂∂=γ 公式(2) 最后,根据广义胡克定律,可得出物理方程:1[()]1[()]1[()]2(1)r r z r z z z r rz rz rz EEEG E θθθθεσμσσεσμσσεσμσστμγτ⎫=-+⎪⎪⎪=-+⎪⎬⎪=-+⎪⎪+==⎪⎭公式(3) 或 ()()2112112()()2112112()()2112112()2(1)2(1)r r r z z z rz rz rz E E u e e e G r E E u e e e G r E E w e e e G z E E u w G z rθθθμμσελεμμμμμμσελεμμμμμμσελεμμμμτγγμμ∂⎫=+=+=+⎪+-+-∂⎪⎪=+=+=+⎪+-+-⎪⎬∂⎪=+=+=+⎪+-+-∂⎪∂∂⎪==+=⎪++∂∂⎭ 公式(4) 式中,r z u u w e r r z θεεε∂∂==++∂∂++为体积应变。
弹性力学:09 空间问题的解答

4. 位移势函数的引用 (对应于无旋位移场)
为简单起见,不计体力
(
G)
x
G2u
Fx
0
(
G)
y
G2v
Fy
0
1 2u 0 1 2 x
1 2v 0 1 2 y
(
G)
z
G2w
Fz
0
1 2w 0 1 2 z
现假设位移是有势的,即:位移在某一方向
的分量可以用位移势函数ψ(x,y,z)在该方向的
问题描述: 设有半空间体,其比重为p,在水平边界面上
受均布压力q的作用,试用位移法求位移分量和应力分量。
并假设在z = h 处w =0。
q
1. 由于任意铅直平面都是对称面,假设
u 0,v 0, w w(z) (1)
x
R
y
z
e u v w d w e 0, e 0, e d2 w (2) z x y z d z x y z d z2
通过与平面问题 及极坐标中同样的分 析,可见,由径向位 移引起的形变分量为:
由于对称,各点
环向位移为零,由径
向位移产生的应变为
u
,
u
,
z
u z
1. 轴对称问题和球对称问题的基本方程
由轴向位移w产生的 应变为
z
w z
,
z
w
迭加得到几何方程
u
,
u
z
w, z
z
u z
w
1. 轴对称问题和球对称问题的基本方程
在球对称问题中,应力、应变、位移等分 量都只是径向坐标ρ的函数。
球对称问题
1. 轴对称问题和球对称问题的基本方程
Hertz理论

2 1
1 K2 E2
2 2
方程(19)
由方程(14)和(17)可以求得 方程(19)的表达式为:
K1 K 2 q ds d r
2
现在问题转化为寻求 q 的一个表达式 以满足上式。
当两球体受到力P的作用而沿着0点的法向 相互压紧时,在接触处发生局部变形,而形 成一个小的圆形接触面(斑),其接触区半 径及变形均远远小于两球半径R1、R2。 因此M和N两点的距离为:
r z1 z2 2
2
1 1 R R 2 1
弹性变形量计算(14)
设 w1 表示球体1面上的点M由于局部变形 所产生的沿 z1 轴方向的位移,w2 表示球2 面上的点N由于局部变形所产生的沿 z2 轴方 向的位移,两球的中心O1O2彼此接近的距 离为。如果M和N点在接触区域内,则可以 得到: z z w w
按照Hertz假设,接触区域的压力分布是半球体 形式的,这样接触中心的压力最大,为q0,其
位置在接触中心O处。所以接触区的压力 分布q的积分可以表达为(见图4):
q0 q ds a F F
a 2
2
r 2 sin 2
式中F是虚线半圆的面积,a 是接触圆半径。 积分表达式是把接触压力沿弦 mn 进行积分, 可以求得。 将上述方程代入到方程(19)式,得:
方程(1)
因为 d 很小,所以可以认为式中的
d d sin 2 2
并略去高阶微量,并除以 r· dr · d · dz, 前式整理后可得: