欧姆龙plc的指令
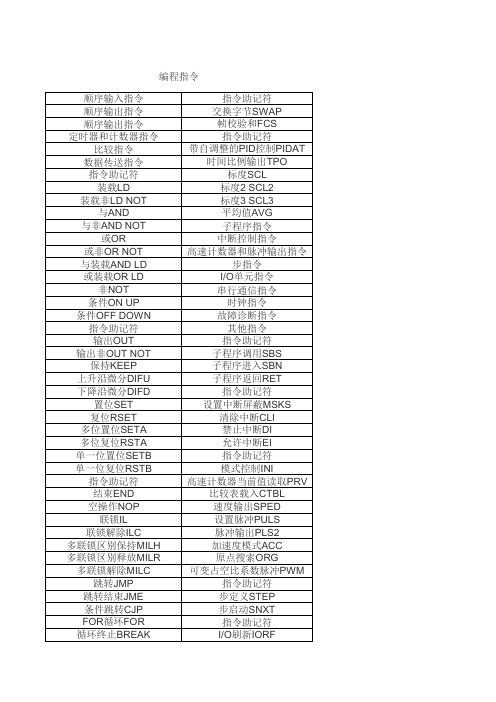
欧姆龙PLC编程指令
下一个循环NEXT 7段译码SDEC 数字开关输入DSW 指令助记符 矩阵输入MTR 定时器 TIM 7段显示输出7SEG 编辑指令 指令助记符 发送TXD 数据移位指令 递增/递减指令 接收RXD 四则运算指令 指令助记符 日历加法CADD 转换指令 日历减法CSUB 逻辑指令 时钟调整DATE 特殊算术指令 特殊算术指令 指令助记符 故障报警FAL 表格数据处理指令 严重故障报警FALS 数据控制指令 指令助记符 指令助记符 移位寄存器SFT 设置进位STC 可逆移位寄存器SFTR 清除进位CLC 字移位WSFT 延长最大循环时间WDT TIMX 算术左移ASL 算术右移ASR 计数器 CNT 循环左移ROL CNTX 循环右移ROR 一个数字左移SLD 高速定时器 TIMH 一个数字右移SRD TIMHX 左移N位NASL 双字左移N位NSLL 1MS定时器 TMHH 右移N位NASR TMHHX 双字右移N位NSRL 指令助记符 累计定时器 TTIM 二进制递增++ TTIMX 双字二进制递增++L 二进制递减-- 长时间定时器 TIML 双字二进制递减--L TIMLX BCD递增++B 双字BCD递增++BL 可逆计数器 CNTR BCD递减--B CNTRX 双字BCD递减--BL 定时器/计数器复位 指令助记符 CNR 无进位带符号二进制加法+ CNRX 无进位带符号双字二进制加法+L 有进位带符号二进制加法+C 指令助记符 有进位带符号双字二进制加法+CL 输入比较指令 无进位BCD加法+B (无符号) 无进位双字BCD加法+BL LD,AND,OR+= 有进位BCD加法+BC LD,AND,OR+<>
欧姆龙PLC指令集讲义全
2.指令集
2.10.6单字节数据分配指令:DIST(080)
把源字传送到由基地址加偏移量计算得出的目标字中。
2.指令集
2.10.7数据调用指令:COLL(081)
把源字(由基址加偏移量计算得出)传送到目标字中。
2.指令集
2.10.8位传送指令:MOVB(082)
传送指定位。
2.指令集
2.3.2 上升沿微分指令和下降沿微分指令DIFU和DIFD
2.指令集
2.指令集
2.3.3 置位和复位指令SET和RESET
2.指令集
2.3.3 置位和复位指令SET和RESET
2.指令集
2.3.4 保持指令 KEEP
2.指令集
2.指令集
应用KEEP指令的梯形图
紧急1
00001
2.指令集
2.11.3 双字比较指令:CMPL(060)
比较两个双字无符号二进制值(常数和/
或指定字的内容),并输出结果到辅
助区的算术标志中。
2.11.4
块比较指令:BCMP (068) 比较源数据和16 个范围(由16 个下限和16 个上限定义),当源数据在范围 内时,结果字中的相应位变ON。
2.指令集
2.9.2 可逆移位寄存器指令 SFTR
产生一个可向右也可向左移动数据的移位寄存器。
2.指令集
2.9.3 算术左移指令 ASL,算术右移指令 ASR Wd 的内容左移一位。Wd 的内容向右移1 位。
2.指令集
2.9.4 循环左移指令 ROL, 循环右移指令 ROR
循环左移指令:所有Wd
传送数据的一个字到指定字中。在下面例子中,当CIO
000000为ON时,CIO
欧姆龙的timer指令和ton指令
欧姆龙的timer指令和ton指令
欧姆龙PLC的计时器指令包括TON(Timer On Delay)和TOF(Timer Off Delay)两种类型。
TON指令是用来实现延时功能的,当输入信号触发时,计时器开始计时,当计时时间达到设置的时间时,输出信号才会触发。
TON指令的格式如下:
TON (计时器地址, 时间常数, 输出地址)
其中,计时器地址指定计时器的存储地址,时间常数指定计时器的定时时间,输出地址指定输出信号的存储地址。
TOF指令的作用是定时器延时关断,当输入信号触发时,计时器开始计时,当计时时间达到设置的时间时,输出信号关断。
TOF指令的格式如下:
TOF (计时器地址, 时间常数, 输出地址)
其中,各参数的含义与TON指令相同。
这些指令可用于实现PLC系统中的定时和延时控制功能,根据具体应用场景和需求,选择合适的指令并进行编程,即可实现相应的控制逻辑。
欧姆龙PLC指令集
欧姆龙PLC指令集识别码plc的工作模式名称RUN MON PRGRR ○ ○ ○ 读出输入/输出内部辅助/特殊继电器区RL ○ ○ ○ 读出链接继电器(LR)区RH ○ ○ ○ 读出保持继电器(HR)区RC ○ ○ ○ 读出定时器/计数器当前值区RG ○ ○ ○ 读出定时器/计数器设定值数据RD ○ ○ ○ 读出数据内存(DM)区RJ ○ ○ ○ 读出辅助记忆继电器(AR)区WR × ○ ○ 写入输入/输出内部辅助/特殊继电器区WL × ○ ○ 写入链接继电器(LR)区WH × ○ ○ 写入保持继电器(HR)区WC × ○ ○ 写入定时器/计数器当前值区WG × ○ ○ 写入定时器/计数器设定值数据WD × ○ ○ 写入数据内存(DM)区WJ × ○ ○ 写入辅助记忆继电器(AR)区R# ○ ○ ○ 设定值读出1R$ ○ ○ ○ 设定值读出2W# × ○ ○ 设定值写入1W$ × ○ ○ 设定值写入2MS ○ ○ ○ 读出状态CS ○ ○ ○ 写入状态MF ○ ○ ○ 读出故障信息KS × ○ ○ 强制置位KR × ○ ○ 强制复位FK × ○ ○ 多点强制置位/复位KC × ○ ○ 解除强制置位/复位MM ○ ○ ○ 读出机种码TS ○ ○ ○ 测试RP ○ ○ ○ 读出程序WP × × ○ 写入程序QQ ○ ○ ○ 复合命令XZ ○ ○ ○ 放弃(仅命令)** ○ ○ ○ 初始化(仅命令)IC - - - 命令未定义错误(仅响应)说明:1. ○:有效,×:无效,-:与横式无关。
2. RUN=运行,MON=监视,PRG=编程。
例:“@00SC0252*\CR” //将PLC设置在监视模式(00:编程,02:监视,03:运行)其中:“@”为起始符;“00”为通讯站号;“02”为命令见上;“52”=前面所有ASCII字符码值的异或运算结果,“\CR”=字符码chr(13)。
欧姆龙PLC编程指令
双字长传送MOVL 传送非MVN 传送位MOVB 数字传送MOVD 多位传送XFRB 块传送XFER 块置位BSET 数据交换XCHG 单字分配DIST 数据收集COLL
有进位双字BCD加法+BCL LD,AND,OR+< LD,AND,OR+<= 无进位带符号二进制减法- 无进位带符号双字二进制减法-L LD,AND,OR+> 有进位带符号二进制减法-C LD,AND,OR+>= 有进位带符号双字二进制减法-CL 输入比较指令 无进位BCD减法-B (双字长,无符号) 无进位双字BCD减法-BL LD,AND,OR+=+L 有进位BCD减法-BC LD,AND,OR+<>+L 有进位双字BCD减法-BCL LD,AND,OR+<+L 带符号二进制乘法* LD,AND,OR+<=+L 带符号双字二进制乘法*L LD,AND,OR+>+L BCD乘法*B LD,AND,OR+>=+L 双字BCD乘法*BL 输入比较指令 带符号二进制除法/ (带符号) 带符号双字二进制除法/L LD,AND,OR+=+S BCD除法/B LD,AND,OR+<>+S 双字BCD除法/BL LD,AND,OR+<+S LD,AND,OR+<=+S 指令助记符 BCD→二进制BIN LD,AND,OR+>+S 双字BCD→双字二进制BINL LD,AND,OR+>=+S 二进制→BCD BCD 输入比较指令 双字二进制→双字BCD BCDL (双字长,带符号) 二进制求补NEG LD,AND,OR+=+SL 数据译码MLPX LD,AND,OR+<>+SL 数据编码DMPX LD,AND,OR+<+SL ASCⅡ转换码ASC LD,AND,OR+<=+SL ASCⅡ→HEX HEX LD,AND,OR+>+SL LD,AND,OR+>=+SL 指令助记符 逻辑与ANDW 时间比较指令 双字逻辑与ANDL =DT <>DT 逻辑或ORW <DT 双字逻辑或ORWL 异或XORW <=DT >DT 双字异或XORL 求补COM >=DT 双字求补COML 比较CMP 双字比较CMPL 指令助记符 算术处理APR 带符号二进制比较CPS 位计数器BCNT 双字长带符号二进制比较CPSL 表格比较TCMP 指令助记符 浮点数→16位FIX 无符号块比较BCMP 浮点数→32位FIXL 区域范围比较ZCP 16位→浮点数FLT 双区域范围比较ZCPL 32位→浮点数FLTL 指令助记符 浮点数加法+F 传送MOV
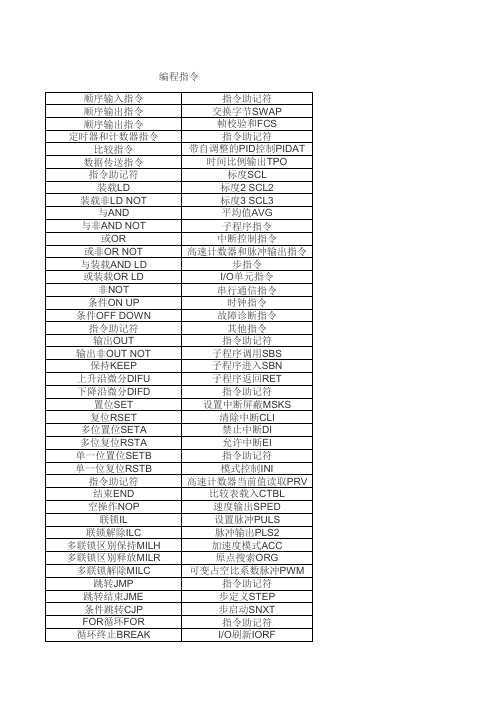
欧姆龙(omron)PLC指令

顺序输入指令
顺序输出指令
顺序输出指令
定时器和计数符
装载LD
装载非LD NOT
与AND
与非AND NOT
或OR
或非OR NOT
与装载AND LD
或装载OR LD
非NOT
条件ON UP
条件OFF DOWN
指令助记符
输出OUT
输出非OUT NOT
保持KEEP
上升沿微分DIFU
I/O刷新IORF
7段译码SDEC
数字开关输入DSW
矩阵输入MTR
7段显示输出7SEG
指令助记符
发送TXD
接收RXD
指令助记符
日历加法CADD
日历减法CSUB
时钟调整DATE
指令助记符
故障报警FAL
严重故障报警FALS
指令助记符
设置进位STC
清除进位CLC
延长最大循环时间WDT
TIMX
计数器
CNT
CNTX
LD,AND,OR+>
LD,AND,OR+>=
输入比较指令
(双字长,无符号)
LD,AND,OR+=+L
LD,AND,OR+<>+L
LD,AND,OR+<+L
LD,AND,OR+<=+L
LD,AND,OR+>+L
LD,AND,OR+>=+L
输入比较指令
(带符号)
LD,AND,OR+=+S
LD,AND,OR+<>+S
有进位带符号双字二进制加法+CL
无进位BCD加法+B
无进位双字BCD加法+BL
有进位BCD加法+BC
有进位双字BCD加法+BCL
欧姆龙(omron)PLC指令
指令助记符
设置中断屏蔽MSKS
清除中断CLI
禁止中断DI
允许中断EI
指令助记符
模式控制INI
高速计数器当前值读取PRV
比较表载入CTBL
速度输出SPED
设置脉冲PULS
脉冲输出PLS2
加速度模式ACC
原点搜索ORG
可变占空比系数脉冲PWM
指令助记符
步定义STEP
步启动SNXT
指令助记符
指令助记符
定时器
TIM
编辑指令
数据移位指令
递增/递减指令
四则运算指令
转换指令
逻辑指令
特殊算术指令
特殊算术指令
表格数据处理指令
数据控制指令
指令助记符
移位寄存器SFT
可逆移位寄存器SFTR
字移位WSFT
算术左移ASL
算术右移ASR
循环左移ROL
循环右移ROR
一个数字左移SLD
一个数字右移SRD
左移N位NASL
32位→浮点数FLTL
浮点数加法+F
浮点数减法-F
浮点数除法/F
浮点数乘法*F
浮点符号比较
LD, AND, OR+=F
LD, AND, OR+<>F
LD, AND, OR+<F
LD, AND, OR+<=F
LD, AND, OR+>F
LD, AND, OR+>=F
浮点数→ASCⅡFSTR
ASCⅡ→浮点数FVAL
指令助记符
交换字节SWAP
帧校验和FCS
指令助记符
带自调整的PID控制PIDAT
时间比例输出TPO
标度SCL
OMRONPLC常用基本指令
OMRONPLC常用基本指令第三节OMRON PLC常用基本指令一、逻辑条件指令逻辑条件指令用于为输出指令、功能指令建立逻辑条件⒈起始指令LD和LD NOT每一个梯级的开始要用起始指令如果梯级的开始是常开触点,就使用LD指令如果梯级的开始是常闭触点,就用LD NOT指令LD和LD NOT指令的使用0000010000 0000110001地址指令助记符数据00000LD00000 00001OUT10000 00002LD NOT00001 00003OUT10001⒉逻辑与操作指令AND和AND NOT逻辑与就是触点的串联连接指令串联一个常开触点用AND指令串联一个常闭触点用AND NOT指令AND和AND NOT指令的用法000010000310000 000020000410001地址指令助记符数据00000LD0000100001AND NOT0000300002OUT1000000003LD NOT0000200004AND0000400005OUT10001⒊逻辑或操作指令OR和OR NOT逻辑或就是触点的并联连接指令并联一个常开触点用OR指令并联一个常闭触点用OR NOT指令OR和OR NOT指令的用法指令助记符数据LD NOT 00000OR00001OR NOT 00002AND 00003OUT 100030000010003000010000200003AND LD指令和OR LD指令各有什么功能?⒋块与指令AND LDAND LD指令用来处理两个触点组的串联触点组是若干个触点的组合,也叫程序块当两个触点组(程序块)串联时,每个触点组都以起始指令(LD或LD NOT)开始单独编程,然后用AND LD指令将它们串联起来AND LD指令的用法LD 00000OR 00001LD00002OR NOT 00003AND LD OUT100000000010000000010000300002程序块程序块⒌块或指令OR LDOR LD指令用来处理两个触点组的并联当两个触点组(程序块)并联时,每个触点组都以起始指令(LD或LD NOT)开始单独编程然后用OR LD指令将两个触点组并联OR LD指令的用法LD 00000AND 00002LD00001AND NOT 00003OR LD OUT100000000010000000010000300002程序块程序块二、输出指令按照逻辑条件建立继电器、定时器、计数器等元件的状态⒈OUT和OUT NOT指令OUT指令将逻辑操作的结果写到输出继电器、内部辅助继电器、保持继电器及暂存继电器等OUT NOT指令是将逻辑操作的结果取反后写到输出继电器、内部辅助继电器、保持继电器等常用基本指令应用举例PLC0000100002000030000400005000060000710004100001000110004END程序工作演示⒉锁存指令KEEP使用KEEP指令的继电器有两个输入端置位端S复位端R置位端逻辑一接通,继电器接通并保持当复位端逻辑接通时,该继电器才断开锁存指令KEEP工作演示LD 00002LD 00003KEEP 10000000021000000003KEEP SR 00002100001000000003实现自锁功能有几种方法?有什么不同?KEEP指令可实现自锁功能锁存指令的工作波形图0000210000 00003KEEPSR⒊微分指令微分指令分为两种上升沿微分指令DIFU下降沿微分指令DIFDDIFU的功能是:当逻辑条件从断到通时,指定继电器仅接通一个扫描周期DIFD的功能是:当逻辑条件从通到断时,指定继电器仅接通一个扫描周期微分指令DIFU、DIFD工作演示微分指令的工作波形图00002DIFU 01600DIFD 0160100002 01600 01601接通断开接通LD00002DIFU01600 DIFD01601。
欧姆龙PLC指令
欧姆龙PLC指令的列表编程指令顺序输入指令顺序输出指令顺序输出指令定时器和计数器指令比较指令数据传送指令指令助记符装载LD装载非LD NOT与AND与非AND NOT或OR或非OR NOT与装载AND LD或装载OR LD非NOT条件ON UP条件OFF DOWN指令助记符输出OUT输出非OUT NOT保持KEEP上升沿微分DIFU下降沿微分DIFD置位SET复位RSET多位置位SETA多位复位RSTA单一位置位SETB单一位复位RSTB指令助记符结束END空操作NOP联锁IL联锁解除ILC多联锁区别保持MILH 多联锁区别释放MILR 多联锁解除MILC跳转JMP跳转结束JME条件跳转CJP循环FOR循环终止BREAK下一个循环NEXT指令助记符定时器 TIM编辑指令数据移位指令递增/递减指令四则运算指令转换指令逻辑指令特殊算术指令特殊算术指令表格数据处理指令数据控制指令指令助记符移位寄存器SFT可逆移位寄存器SFTR 字移位WSFT算术左移ASL算术右移ASR循环左移ROL循环右移ROR一个数字左移SLD一个数字右移SRD左移N位NASL双字左移N位NSLL右移N位NASR双字右移N位NSRL指令助记符二进制递增++双字二进制递增++L二进制递减--双字二进制递减--LBCD递增++B双字BCD递增++BLBCD递减--B双字BCD递减--BL指令助记符无进位带符号二进制加法+无进位带符号双字二进制加法+L 有进位带符号二进制加法+C有进位带符号双字二进制加法+CL 无进位BCD加法+B无进位双字BCD加法+BL有进位BCD加法+BC有进位双字BCD加法+BCL无进位带符号二进制减法-无进位带符号双字二进制减法-L 有进位带符号二进制减法-C有进位带符号双字二进制减法-CL 无进位BCD减法-B无进位双字BCD减法-BL有进位BCD减法-BC有进位双字BCD减法-BCL带符号二进制乘法*带符号双字二进制乘法*LBCD乘法*B双字BCD乘法*BL带符号二进制除法/带符号双字二进制除法/LBCD除法/B双字BCD除法/BL指令助记符BCD→二进制BIN双字BCD→双字二进制BINL二进制→BCD BCD双字二进制→双字BCD BCDL二进制求补NEG数据译码MLPX数据编码DMPXASCⅡ转换码ASC ASCⅡ→HEX HEX 指令助记符逻辑与ANDW双字逻辑与ANDL逻辑或ORW双字逻辑或ORWL异或XORW双字异或XORL求补COM双字求补COML指令助记符算术处理APR位计数器BCNT浮点数→16位FIX。
欧姆龙PLC指令集讲义全
处 理 指定位变为OFF 位状态保持 复位 PV保持 PC保持 位状态保持 不执行 不执行
2.指令集
2.5 跳转和跳转终了指令 JMP和JME
2.指令集
2.6结束指令 END
2.7 空操作指令 NOP
此指令无任何功能。(NOP(000) 不做任何操作)
2.指令集
2.8 定时器和计数器指令
2.8.1 定时器指令 TIM , 以0.1s为单位
2.指令集
2.10.9传送数字指令:MOVD(083)
传送一个或多个指定的数字。(每个数字由4
位组成)。
2.指令集
2.指令集
2.10.10 多位传送指令:XFRB(062)
传送指定数目的连续位。
2.指令集
2.指令集
2.11 数据比较指令
2.11.1 多字比较指令:MCMP (019) 16 个连续字与另外16 个连续字相比较,并使结果字中相应于两字内容不相等 的位变ON。R 的每一位包含了在16 字设置中两个字比较的结果,R 中的位n(n = 00 ~ 15)包含了字S1 + n 和S2 + n 的比较结果。
在下例中当CIO
000000 为ON 时, CIO 0011 和CIO 0010 中的十六进制数转
换 成BCD 码,并存储在D00100 和D00101 中。
2.指令集
2.13 BCD码运算指令
2.13.1 不带进位的BCD 加:+B(404)
4
个数字(单字)有符号十六进制数和/ 或常数相除。
2.指令集
受指令执行影响的标志位(SR区标志位)
缩 写 ER CY GR EQ LE N OF UF
名 称 指令执行出错标志 进位标志 大于标志 等于标志 小于标志 负标志 上溢标志 下溢标志
欧姆龙 OMRON PLC 指令大全
欧姆龙 OMRON PLC 指令大全1、按位逻辑操作:AND OR NOT EXOR XAND XOR2、数据计算:ADD SUB LMUL SMUL DIV SQR SQRT NEG3、移位操作:ROL ROR SHL SHR SEL SR4、比较操作:EQ NE GT GE LT LE5、特殊操作:S->S S->N N->S MOV ABS6、输入输出指令:INP OUT UDT UDTS UDA UDTSA UDTR UDTSR7、文档控制指令:BSS BSW BCC BCL MOVM CNC8、强制指令:FORC FRCR SETF CETF9、数据转换指令:FTL FTR SPL SPR CTU DTU3 BTC11、特殊存储器指令:TM TMH DS DSZ DSNZ12、定时器指令:TON TOF RTO TMR14、模拟量操作指令:SV SVT VHC VHS ASV ASVT15、数据移动指令:MOV MVI MOVB MVIW MV OB MVOB MW MWI MOVW MVIW MW MWI MOVB MVI B16、连接指令:JMP JMN JMZ JMC JC JR JLR JRE JLT JLE JEQ JNE JGT JGE17、延时指令:WAIT WT18、除法指令:QDIV QDIVU QDIVS QCON19、CPU指令:HIGH LOW RESET ENABLE DISABLE INDEX WRITE REGISTER READ REGISTER20、中断处理指令:ENI DI DIS INT TRAP21、循环指令:LP DJNZ22、实时时间指令:CAD CDF CDFS23、程序控制指令:ACLC ACLS BSC BSCB BSN BSNB CFC CFS DF TR ON TS24、补正指令:CCMTL CCMTR CCM25、比例控制指令:MAC SCALE。
欧姆龙plc指令讲解

比较处理案例
进行数值比较和控制
输入 标题
详细描述
欧姆龙PLC的比较指令可以对各种数值进行比较,如 大于、小于、等于等。通过数值比较,可以实现各种 控制需求,如水位控制、温度控制等。
总结词
总结词
利用欧姆龙PLC的字符串比较指令,可以对字符串进 行比较和控制。通过字符串比较,可以实现各种字符
串处理需求,如文本检测、设备识别等。
高速处理指令
中断指令
允许程序在特定事件发生时立即执行 一段代码,提高程序的实时响应能力。
高速输入输出指令
允许程序快速读写数字信号,适用于 实时数据采集和控制系统。
高速计数器指令
允许程序快速计数和控制数字信号, 适用于高速运动控制和脉冲信号处理。
定时器指令
允许程序在指定时间间隔内执行一段 代码,实现定时控制和延时操作。
通过监控PLC的运行状态,及时发现和解决 潜在的指令问题。
定期维护
定期对PLC进行维护,包括清理灰尘、检查 接线等,以确保指令的正常运行。
THANKS
感谢观看
算术处理案例
总结词
进行数值运算和控制
总结词
实现模拟量处理
详细描述
欧姆龙PLC的算术指令可以对各种数值进行运算 ,如加、减、乘、除等。通过数值运算,可以实 现各种控制需求,如PID控制、流量控制等。
详细描述
利用欧姆龙PLC的模拟量处理指令,可以对模拟 量信号进行采集、转换和调节。通过模拟量处理 ,可以实现温度、压力、流量等物理量的精确控 制。
将源操作数的值循环左移 指定的位数,并将结果存 储在目标操作数中。
ROR指令
将源操作数的值循环右移 指定的位数,并将结果存 储在目标操作数中。
欧姆龙应用指令

表4-10 加法指令的操作数内容
S1/S2
000~019CH
200~231CH
HR00~HR19
15.减法指令SUB(31)
本指令与ADD指令相似,是把两个四位BCD数作带借位减法,差值送入指定通道,其操作数同ADD指令。在编写SUB指令语言时,必须指定被减数,减数和差值的存放通道三个数
说明:执行减法运算前必须加一条清进位位指令CLC(41);被减数和减数必须是BCD数,否则25503置ON,不执行SUB指令;若运算结果有借位,则进位标志继电器25504为ON;若运算结果为零,则专用继电器25506变为ON。
8.快速定时器指令 TIMH(15)
本指令操作数占二行,一行为定时器号000~127(不得与TIM或CNT重复使用同号),另一行为设定时间。设定的定时时间,可以是常数,也可以由通道000CH~019CH,20000CH~25515CH,HR0000~HR1915中的内容决定,但必须为四位BCD码。其功能与基本指令中的普通定时器作用相似,唯一区别是TIMH定时精度为0. 01s,定时范围为0~99.99s。
13.进位置位指令STC(40)和进位复位位指令CLC(41)
这两条指令的功能是将进位标志继电器25504置位(即置ON)或强制将进位标志继电器25504复位(即置OFF)。当这两条指令前面状态为ON时,执行指令,否则不执行。通常在执行加、减运算操作之前,先执行CLC指令来清进位位,以确保运算结果的正确。
25506
25507
欧姆龙omronPLC指令
欧姆龙o m r o n P L C指令 Document serial number【UU89WT-UU98YT-UU8CB-UUUT-UUT108】编程指令顺序输入指令顺序输出指令顺序输出指令定时器和计数器指令比较指令数据传送指令指令助记符装载LD装载非LD NOT与AND与非AND NOT或OR或非OR NOT与装载AND LD或装载OR LD非NOT条件ON UP条件OFF DOWN指令助记符输出OUT输出非OUT NOT保持KEEP上升沿微分DIFU下降沿微分DIFD置位SET复位RSET多位置位SETA多位复位RSTA单一位置位SETB单一位复位RSTB指令助记符结束END空操作NOP联锁IL联锁解除ILC多联锁区别保持MILH 多联锁区别释放MILR 多联锁解除MILC跳转JMP跳转结束JME条件跳转CJPFOR循环FOR循环终止BREAK下一个循环NEXT指令助记符定时器TIM编辑指令数据移位指令递增/递减指令四则运算指令转换指令逻辑指令特殊算术指令特殊算术指令表格数据处理指令数据控制指令指令助记符移位寄存器SFT可逆移位寄存器SFTR 字移位WSFT算术左移ASL算术右移ASR循环左移ROL循环右移ROR一个数字左移SLD一个数字右移SRD左移N位NASL双字左移N位NSLL右移N位NASR双字右移N位NSRL指令助记符二进制递增++双字二进制递增++L二进制递减--双字二进制递减--LBCD递增++B双字BCD递增++BLBCD递减--B双字BCD递减--BL指令助记符无进位带符号二进制加法+无进位带符号双字二进制加法+L 有进位带符号二进制加法+C有进位带符号双字二进制加法+CL 无进位BCD加法+B无进位双字BCD加法+BL有进位BCD加法+BC有进位双字BCD加法+BCL无进位带符号二进制减法-无进位带符号双字二进制减法-L 有进位带符号二进制减法-C有进位带符号双字二进制减法-CL 无进位BCD减法-B无进位双字BCD减法-BL有进位BCD减法-BC有进位双字BCD减法-BCL带符号二进制乘法*带符号双字二进制乘法*LBCD乘法*B双字BCD乘法*BL带符号二进制除法/带符号双字二进制除法/LBCD除法/B双字BCD除法/BL指令助记符BCD→二进制BIN双字BCD→双字二进制BINL二进制→BCD BCD双字二进制→双字BCD BCDL 二进制求补NEG数据译码MLPX数据编码DMPXASCⅡ转换码ASCASCⅡ→HEX HEX指令助记符逻辑与ANDW双字逻辑与ANDL逻辑或ORW双字逻辑或ORWL异或XORW双字异或XORL求补COM双字求补COML指令助记符算术处理APR位计数器BCNT指令助记符浮点数→16位FIX浮点数→32位FIXL16位→浮点数FLT32位→浮点数FLTL浮点数加法+F浮点数减法-F浮点数除法/F浮点数乘法*F浮点符号比较LD, AND, OR+=FLD, AND, OR+<>FLD, AND, OR+<FLD, AND, OR+<=FLD, AND, OR+>FLD, AND, OR+>=F浮点数→ASCⅡ FSTRASCⅡ→浮点数FVAL指令助记符交换字节SWAP帧校验和FCS指令助记符带自调整的PID控制PIDAT 时间比例输出TPO标度SCL标度2 SCL2标度3 SCL3平均值AVG子程序指令中断控制指令高速计数器和脉冲输出指令步指令I/O单元指令串行通信指令时钟指令故障诊断指令其他指令指令助记符子程序调用SBS子程序进入SBN子程序返回RET指令助记符设置中断屏蔽MSKS清除中断CLI禁止中断DI允许中断EI指令助记符模式控制INI高速计数器当前值读取PRV 比较表载入CTBL速度输出SPED设置脉冲PULS脉冲输出PLS2加速度模式ACC原点搜索ORG可变占空比系数脉冲PWM 指令助记符步定义STEP步启动SNXT指令助记符I/O刷新IORF7段译码SDEC数字开关输入DSW矩阵输入MTR7段显示输出7SEG指令助记符发送TXD接收RXD指令助记符日历加法CADD日历减法CSUB时钟调整DATE指令助记符故障报警FAL严重故障报警FALS指令助记符设置进位STC清除进位CLC延长最大循环时间WDT TIMX计数器CNTCNTX高速定时器TIMHTIMHX1MS定时器TMHHTMHHX累计定时器TTIMTTIMX长时间定时器TIMLTIMLX可逆计数器CNTRCNTRX定时器/计数器复位CNRCNRX指令助记符输入比较指令(无符号)LD,AND,OR+=LD,AND,OR+<> LD,AND,OR+< LD,AND,OR+<=LD,AND,OR+> LD,AND,OR+>=输入比较指令(双字长,无符号) LD,AND,OR+=+L LD,AND,OR+<>+LLD,AND,OR+<+L LD,AND,OR+<=+L LD,AND,OR+>+L LD,AND,OR+>=+L 输入比较指令(带符号)LD,AND,OR+=+S LD,AND,OR+<>+S LD,AND,OR+<+S LD,AND,OR+<=+S LD,AND,OR+>+S LD,AND,OR+>=+S 输入比较指令(双字长,带符号) LD,AND,OR+=+SL LD,AND,OR+<>+SL LD,AND,OR+<+SL LD,AND,OR+<=+SL LD,AND,OR+>+SL LD,AND,OR+>=+SL 时间比较指令=DT<>DT<DT<=DT>DT>=DT比较CMP双字比较CMPL带符号二进制比较CPS双字长带符号二进制比较CPSL 表格比较TCMP无符号块比较BCMP区域范围比较ZCP双区域范围比较ZCPL指令助记符传送MOV双字长传送MOVL传送非MVN传送位MOVB数字传送MOVD多位传送XFRB块传送XFER块置位BSET数据交换XCHG 单字分配DIST 数据收集COLL。
欧姆龙plc指令
功能指令又称专用指令,CPM1A系列PLC提供的功能指令主要用来实现程序控制,数据处理和算术运算等。
这类指令在简易编程器上一般没有对应的指令键,只是为每个指令规定了一个功能代码,用两位数字表示。
在输入这类指令时先按下“FUN”键,再按下相应的代码。
下面将介绍部分常用的功能指令。
1.空操作指令NOP(0 0)本指令不作任何的逻辑操作,故称空操作,也不使用继电器,无须操作数。
该指令应用在程序中留出一个地址,以便调试程序时插入指令,还可用于微调扫描时间。
2.结束指令END(01)本指令单独使用,无须操作数,是程序的最后一条指令,表示程序到此结束。
PLC在执行用户程序时,当执行到END指令时就停止执行程序阶段,转入执行输出刷新阶段。
如果程序中遗漏END指令,编程器执行时则会显示出错信号:“NO END INSET”:当加上END指令后,PLC才能正常运行。
本指令也可用来分段调试程序。
3.互锁指令IL(02)和互锁清除指令ILC(0 3)这两条指令不带操作数,IL指令为互锁条件,形成分支电路,即新母线以便与LD 指令连用,表示互锁程序段的开始;ILC指令表示互锁程序段结束。
互锁指令IL和互锁清除指令ILC用来在梯形图的分支处形成新的母线,使某一部分梯形图受到某些条件的控制。
IL和ILC指令应当成对配合使用,否则出错。
IL/ILC指令的功能是:如果控制IL的条件成立(即ON),则执行互锁指令。
若控制IL的条件不成立(即OFF),则IL与ILC之间的互锁程序段不执行,即位于IL/ILC之间的所有继电器均为OFF,此时所有定时器将复位,但所有的计数器,移位寄存器及保持继电器均保持当前值。
4.跳转开始指令JMP(0 4)和跳转结束指令JME(0 5)这两条指令不带操作数,JMP指令表示程序转移的开始,JME指令表示程序转移的结束。
JMP/JME指令组用于控制程序分支。
当JMP条件为OFF时,程序转去执行JME后面的第一条指令;当JMP的条件为ON,则整个梯形图按顺序执行,如同JMP/JME指令不存在一样。
欧姆龙plc传送指令用法
欧姆龙plc传送指令用法1. 欧姆龙 plc 传送指令,那可是个超级厉害的家伙呀!就像你要把一个宝贝从一个地方快速、准确地送到另一个地方一样。
比如你有一组数据,要把它从一个寄存器传到另一个寄存器,这时候传送指令就大显身手啦!2. 欧姆龙 plc 传送指令的用法,很值得好好探究一番呢!好比你是个快递员,要把包裹完好无损地送到目的地,传送指令就是你的得力工具呀。
像把温度值从一个地方传到另一个地方去监控,多神奇!3. 哇塞,欧姆龙 plc 传送指令用法,这可不是一般人能随便掌握的哦!但一旦你学会了,那可不得了,就像你掌握了魔法一样。
比如说,要把生产线上的计数数值传送给上位机,传送指令就能轻松做到!4. 欧姆龙 plc 传送指令的重要性,你可别小瞧啊!这就好像建房子的基石一样。
打个比方,你要把机器的运行状态传到操作面板上,没有传送指令怎么行呢?5. 嘿,欧姆龙 plc 传送指令用法可太关键啦!要是不懂这个,那不就像开车不会打方向盘一样嘛。
比如你想把传感器采集的数据快速地转移到存储区,这时就得靠传送指令啦!6. 欧姆龙 plc 传送指令的魅力,真的是让人难以抗拒呀!就好比是一场精彩的接力赛,一棒接一棒地传递信息呢。
比如要把设备的故障代码传出来进行报警,传送指令绝对必不可少!7. 欧姆龙 plc 传送指令,可真是个宝贝啊!想想看,要是没有它,那不就像失去了翅膀的鸟儿。
举个例子,你要把加工进度的数据传送给管理系统,传送指令就能帮你搞定!8. 欧姆龙 plc 传送指令的用法,真的超级重要,一定要熟练掌握呀!就好像战士手中的武器一样不可或缺。
比如要把设备的运行参数稳定地传输到控制系统,靠的就是它呢!我觉得欧姆龙 plc 传送指令用法真的需要我们认真去研究和掌握,只有这样才能在工业控制中如鱼得水呀!。
欧姆龙plc指令=l的用法
欧姆龙plc指令=l的用法
欧姆龙PLC的指令“=L”用于比较两个数据是否相等。
具体用法如下:
1.“=L”指令用于比较两个数据是否相等,如果相等则输出为真,否则为假。
2.指令中的“L”表示比较的是两个数据的大小,而不是它们之间的逻辑关系。
3.使用该指令时,需要指定两个比较数据。
这些数据可以是常量、寄存器、数据块中的数据等。
4.指令的结果是逻辑值,真为1,假为0。
5.“=L”指令可以用在程序中的任何需要比较两个数据是否相等的场合。
请注意,以上信息仅供参考,具体的用法可能因PLC型号和编程环境的不同而有所差异。
如有疑问,建议参考欧姆龙PLC的编程手册或联系专业工程师获取帮助。
欧姆龙PLC指令的列表 (2)
CP1H:1指令助记符:装载LD装载非LD NOT与AND与非AND NOT或OR或非OR NOT与装载AND LD或装载OR LD非NOT条件ON UP条件OFF DOWN2指令助记符:输出OUT输出非OUT NOT保持KEEP上升沿微分DIFU下降沿微分DIFD置位SET复位RSET多位置位SETA多位复位RSTA单一位置位SETB单一位复位RSTB 3指令助记符:结束END空操作NOP联锁IL联锁解除ILC多联锁区别保持MILH多联锁区别释放MILR 多联锁解除MILC跳转JMP跳转结束JME条件跳转CJP FOR循环FOR循环终止BREAK 下一个循环NEXT4指令助记符:定时器TIM5编辑指令:数据移位指令,递增/递减指令,四则运算指令,转换指令,逻辑指令,特殊算术指令,表格数据处理指令,数据控制指令。
6指令助记符移位寄存器SFT可逆移位寄存器SFTR字移位WSFT算术左移ASL算术右移ASR循环左移ROL循环右移ROR一个数字左移SLD一个数字右移SRD左移N位NASL双字左移N 位NSLL右移N位NASR双字右移N位NSRL7指令助记符二进制递增++双字二进制递增++L二进制递减--双字二进制递减--LBCD递增++B,双字BCD递增++BL,BCD递减--B,双字BCD递减--BL8指令助记符无进位带符号二进制加法+,无进位带符号双字二进制加法+L,有进位带符号二进制加法+C,有进位带符号双字二进制加法+CL,无进位BCD加法+B,无进位双字BCD加法+BL,有进位BCD加法+BC,有进位双字BCD加法+BCL,无进位带符号二进制减法-无进位带符号双字二进制减法-L,有进位带符号二进制减法-C,有进位带符号双字二进制减法-CL,无进位BCD减法-B,无进位双字BCD减法-BL,有进位BCD减法-BC 有进位双字BCD减法-BCL,带符号二进制乘法*,带符号双字二进制乘法*L,BCD乘法*B,双字BCD乘法*BL,带符号二进制除法/,带符号双字二进制除法/L,BCD除法/B双字BCD除法/BL9指令助记符BCD→二进制BIN,双字BCD→双字二进制BINL,二进制→BCD BCD双字二进制→双字BCD BCDL二进制求补NEG,数据译码MLPX,数据编码DMPX,ASCⅡ转换码ASC,ASCⅡ→HEX HEX10指令助记符逻辑与ANDW,双字逻辑与ANDL,逻辑或ORW,双字逻辑或ORWL,异或XORW双字异或XORL,求补COM,双字求补COML11指令助记符算术处理APR,位计数器BCNT12指令助记符浮点数→16位FIX,浮点数→32位FIXL,16位→浮点数FLT,32位→浮点数FLTL浮点数加法+F,浮点数减法-F,浮点数除法/F,浮点数乘法*F浮点符号比较LD, AND, OR+=FLD, AND, OR+<>FLD, AND, OR+<FLD, AND, OR+<=FLD, AND, OR+>FLD, AND, OR+>=F浮点数→ASCⅡFSTRASCⅡ→浮点数FVAL12指令助记符交换字节SWAP,帧校验和FCS13指令助记符带自调整的PID控制PIDAT,时间比例输出TPO,标度SCL,标度2 SCL2,标度3 SCL3 平均值AVG14指令助记符子程序调用SBS,子程序进入SBN,子程序返回RET,设置中断屏蔽MSKS,清除中断CLI,禁止中断DI,允许中断EI,模式控制INI,高速计数器当前值读取PRV比较表载入CTBL,速度输出SPED,设置脉冲PULS,脉冲输出PLS2,加速度模式ACC 原点搜索ORG,可变占空比系数脉冲PWM15指令助记符步定义STEP,步启动SNXT,I/O刷新IORF,7段译码SDEC,数字开关输入DSW矩阵输入MTR,7段显示输出7SEG发送TXD,接收RXD,日历加法CADD,日历减法CSUB,时钟调整DATE,故障报警FAL 严重故障报警FALS,设置进位STC,清除进位CLC,延长最大循环时间WDT TIMX计数器:CNT,CNTX高速定时器:TIMH,TIMHX1MS定时器:TMHH,TMHHX累计定时器:TTIM,TTIMX长时间定时器:TIML,TIMLX可逆计数器:CNTR,CNTRX定时器/计数器复位:CNR,CNRX16指令助记符输入比较指令(无符号)LD,AND,OR+=LD,AND,OR+<>LD,AND,OR+<LD,AND,OR+<=LD,AND,OR+>LD,AND,OR+>=输入比较指令(双字长,无符号)LD,AND,OR+=+LLD,AND,OR+<>+LLD,AND,OR+<+LLD,AND,OR+<=+LLD,AND,OR+>+LLD,AND,OR+>=+L输入比较指令(带符号)LD,AND,OR+=+SLD,AND,OR+<>+SLD,AND,OR+<+SLD,AND,OR+<=+SLD,AND,OR+>+SLD,AND,OR+>=+S输入比较指令(双字长,带符号)LD,AND,OR+=+SLLD,AND,OR+<>+SLLD,AND,OR+<+SLLD,AND,OR+<=+SLLD,AND,OR+>+SLLD,AND,OR+>=+SL时间比较指令=DT<>DT<DT<=DT>DT>=DT比较CMP,双字比较CMPL,带符号二进制比较CPS,双字长带符号二进制比较CPSL 表格比较TCMP,无符号块比较BCMP,区域范围比较ZCP,双区域范围比较ZCPL17指令助记符传送MOV,双字长传送MOVL,传送非MVN,传送位MOVB,数字传送MOVD多位传送XFRB,块传送XFER,块置位BSET,数据交换XCHG,单字分配DIST数据收集COLL6。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
带符号二进制乘法*
带符号双字二进制乘法*L
BCD乘法*B
双字BCD乘法*BL
带符号二进制除法/
带符号双字二进制除法/L
BCD除法/B
双字BCD除法/BL
指令助记符
BCD→二进制BIN
双字BCD→双字二进制BINL
二进制→BCD BCD
双字二进制→双字BCD BCDL
二进制求补NEG
数据译码MLPX
数据编码DMPX
ASCⅡ转换码ASC
ASCⅡ→HEX HEX
指令助记符
逻辑与ANDW
双字逻辑与ANDL
逻辑或ORW
双字逻辑或ORWL
异或XORW
双字异或XORL
求补COM
双字求补COML
指令助记符
算术处理APR
位计数器BCNT
指令助记符
浮点数→16位FIX
浮点数→32位FIXL
16位→浮点数FLT
指令助记符
交换字节SWAP
帧校验和FCS
指令助记符
带自调整的PID控制PIDAT
时间比例输出TPO
标度SCL
标度2 SCL2
标度3 SCL3
平均值AVG
子程序指令
中断控制指令
高速计数器和脉冲输出指令
步指令
I/O单元指令
串行通信指令
时钟指令
故障诊断指令
其他指令
指令助记符
子程序调用SBS
子程序进入SBN
高速定时器
TIMH
TIMHX
1MS定时器
TMHH
TMHHX
累计定时器
TTIM
TTIMX
长时间定时器
TIML
TIMLX
可逆计数器
CNTR
CNTRX
定时器/计数器复位
CNR
CNRX
指令助记符
输入比较指令
(无符号)
LD,AND,OR+=
LD,AND,OR+<>
LD,AND,OR+<
LD,AND,OR+<=
有进位带符号双字二进制加法+CL
无进位BCD加法+B
无进位双字BCD加法+BL
有进位BCD加法+BC
有进位双字BCD加法+BCL
无进位带符号二进制减法-
无进位带符号双字二进制减法-L
有进位带符号二进制减法-C
有进位带符号双字二进制减法-CL
无进位BCD减法-B
无进位双字BCD减法-BL
有进位BCD减法-BC
I/O刷新IORF
7段译码SDEC
数字开关输入DSW
矩阵输入MTR
7段显示输出7SEG
指令助记符
发送TXD
接收RXD
指令助记符
日历加法CADD
日历减法CSUB
时钟调整DATE
指令助记符
故障报警FAL
严重故障报警FALS
指令助记符
设置进位STC
清除进位CLC
延长最大循环时间WDT
TIMX
计数器
CNT
CNTX
32位→浮点数FLTL
浮点数加法+F
浮点数减法-F
浮点数除法/F
浮点数乘法*F
浮点符号比较
LD, AND, OR+=F
LD, AND, OR+<>F
LD, AND, OR+<F
LD, AND, OR+<=F
LD, AND, OR+>F
LD, AND, OR+>=F
浮点数→ASCⅡFSTR
ASCⅡ→浮点数FVAL
双字左移N位NSLL
右移N位NASR
双字右移N位NSRL
指令助记符
二进制递增++
双字二进制递增++L
二进制递减--
双字二进制递减--L
BCD递增++B
双字BCD递增++BL
BCD递减--B
双字BCD递减--BL
指令助记符
无进位带符号二进制加法+
无进位带符号双字二进制加法+L
有进位带符号二进制加法+C
指令助记符
定时器
TIM
编辑指令
数据移位指令
递增/递减指令
四则运算指令
转换指令
逻辑指令
特殊算术指令
特殊算术指令
表格数据处理指令
数据控制指令
指令助记符
移位寄存器SFT
可逆移位寄存器SFSL
算术右移ASR
循环左移ROL
循环右移ROR
一个数字左移SLD
一个数字右移SRD
左移N位NASL
时间比较指令
=DT
<>DT
<DT
<=DT
>DT
>=DT
比较CMP
双字比较CMPL
带符号二进制比较CPS
双字长带符号二进制比较CPSL
表格比较TCMP
无符号块比较BCMP
区域范围比较ZCP
双区域范围比较ZCPL
指令助记符
传送MOV
双字长传送MOVL
传送非MVN
传送位MOVB
数字传送MOVD
多位传送XFRB
LD,AND,OR+<+S
LD,AND,OR+<=+S
LD,AND,OR+>+S
LD,AND,OR+>=+S
输入比较指令
(双字长,带符号)
LD,AND,OR+=+SL
LD,AND,OR+<>+SL
LD,AND,OR+<+SL
LD,AND,OR+<=+SL
LD,AND,OR+>+SL
LD,AND,OR+>=+SL
块传送XFER
块置位BSET
数据交换XCHG
单字分配DIST
数据收集COLL
下降沿微分DIFD
置位SET
复位RSET
多位置位SETA
多位复位RSTA
单一位置位SETB
单一位复位RSTB
指令助记符
结束END
空操作NOP
联锁IL
联锁解除ILC
多联锁区别保持MILH
多联锁区别释放MILR
多联锁解除MILC
跳转JMP
跳转结束JME
条件跳转CJP
FOR循环FOR
循环终止BREAK
下一个循环NEXT
编程指令
顺序输入指令
顺序输出指令
顺序输出指令
定时器和计数器指令
比较指令
数据传送指令
指令助记符
装载LD
装载非LD NOT
与AND
与非AND NOT
或OR
或非OR NOT
与装载AND LD
或装载OR LD
非NOT
条件ON UP
条件OFF DOWN
指令助记符
输出OUT
输出非OUT NOT
保持KEEP
上升沿微分DIFU
LD,AND,OR+>
LD,AND,OR+>=
输入比较指令
(双字长,无符号)
LD,AND,OR+=+L
LD,AND,OR+<>+L
LD,AND,OR+<+L
LD,AND,OR+<=+L
LD,AND,OR+>+L
LD,AND,OR+>=+L
输入比较指令
(带符号)
LD,AND,OR+=+S
LD,AND,OR+<>+S
子程序返回RET
指令助记符
设置中断屏蔽MSKS
清除中断CLI
禁止中断DI
允许中断EI
指令助记符
模式控制INI
高速计数器当前值读取PRV
比较表载入CTBL
速度输出SPED
设置脉冲PULS
脉冲输出PLS2
加速度模式ACC
原点搜索ORG
可变占空比系数脉冲PWM
指令助记符
步定义STEP
步启动SNXT
指令助记符