电动车跷跷板论文
电动车跷跷板设计方案
电动车跷跷板设计方案1. 引言电动车作为一种环保、经济、便捷的交通工具,在城市中越来越受到人们的欢迎。
随着电动车使用的普及,对电动车的性能和舒适性需求也越来越高。
其中,车辆的悬挂系统是决定乘坐舒适性的关键因素之一。
本文将重点介绍电动车跷跷板设计方案。
2. 跷跷板的作用电动车的跷跷板是连接前后轮的重要部件,它在路面不平的情况下起到缓冲和减震作用,提高骑行的舒适性和稳定性。
合理的跷跷板设计能够降低车身的颠簸感,提高乘坐舒适性和操控性。
3. 跷跷板设计需考虑的因素在设计电动车跷跷板时,需要考虑以下因素:3.1 材料选择跷跷板需要具备足够的强度和耐久性,以应对恶劣的路面条件和长时间使用带来的疲劳等问题。
常见的跷跷板材料包括铝合金和碳纤维等。
铝合金具备较高的强度和刚性,而碳纤维材料则轻量且具备良好的振动吸收能力。
3.2 结构设计跷跷板的结构设计需要考虑到整车的重心、空间限制和悬挂系统的类型等因素。
合理的结构设计可以降低车辆的重量,并提高整车的稳定性和行驶的舒适性。
3.3 减震系统跷跷板作为车辆的减震系统之一,需要考虑到减震效果和调校。
通过合理的减震系统设计,可以降低车身的颠簸感,提高骑行的舒适性。
4. 设计方案基于以上考虑因素,本文给出以下电动车跷跷板设计方案:4.1 材料选择采用铝合金材料作为跷跷板材料。
铝合金具备优秀的强度和刚性,同时具有较好的耐腐蚀性和耐久性,适合应对各种路面条件。
在材料选择上,还可以考虑采用碳纤维增强的铝合金,以进一步提高载荷能力和减震效果。
4.2 结构设计跷跷板的结构设计应该考虑到整车的重心和空间限制。
可以采用H 型结构设计,将重力分散到两侧,提高整车的稳定性。
在空间限制允许的情况下,还可以考虑增加三角支撑等结构,提高跷跷板的刚性和稳定性。
4.3 减震系统跷跷板需要配备减震系统,以提高骑行舒适性。
可以采用液压减震器或弹簧减震器,根据不同的需求进行选择。
减震系统还可以根据用户的体重和骑行环境进行调校,以获得最佳的减震效果。
电动车跷跷板设计方案

电动车跷跷板设计方案电动车跷跷板是一种创新性的设计,可以帮助人们更方便地停靠和启动电动车。
在许多城市,电动车已经成为主要的出行方式。
然而,电动车在停车时,需要使用力量将车辆托起或降下,这对于一些年纪较大或身体不适的人来说可能会很困难。
因此,电动车跷跷板是一项非常有用的发明,能够让电动车的停放更加容易和便捷。
一般来说,电动车跷跷板有两种设计方案:手动操作和自动操作。
手动操作的设计需要用户手动旋转跷跷板,以将电动车推起或降下。
这种设计成本较低,但用户需要一定的力量和技能才能轻松完成操作。
另外,手动操作的设计需要更多的时间和精力,不太适合老年人或身体有残疾的人。
自动操作的设计是一种更加先进和高级的设计,它利用电动机和控制器来完成跷跷板的升降操作。
用户只需要轻按按钮或开关即可完成整个过程。
自动操作的设计有多种控制方式,包括遥控器、传感器和自动识别系统等等。
这种设计的成本更高,但用户可以省去很多时间和精力,使用起来非常方便。
除了操作方式的不同,电动车跷跷板的设计还有很多其他的特点。
比如,电动车跷跷板的材料可以采用钢板、铝合金、塑料等多种材质,不同的材料有着不同的优势和劣势,需要根据风险防范、耐用性、安全性和成本等多个因素来选择。
电动车跷跷板的设计还可以增加一些额外的功能,如夜视灯、加热器、视音频系统等等,这些增强功能可以使车辆的停放更加智能化和便捷。
除了以上提到的基本设计特点,为了满足不同用户的需求和喜好,电动车跷跷板还可以增加一些个性化的设计元素。
比如,可以在跷跷板表面印上个性化的图案或标志,让用户可以将自己的电动车个性化地装扮起来。
此外,电动车跷跷板的外形和尺寸也可以根据用户需求进行定制。
在选择电动车跷跷板方案时,需要考虑很多因素,如成本、设计和效果等等。
这些因素关系到电动车跷跷板的使用效果和意义,也与对于产品的整体评估有关。
因此,我们需要在设计电动车跷跷板时,充分考虑不同用户的需求和喜好,以期为用户提供最佳的使用体验。
电动车跷跷板设计与总结

电动车跷跷板设计与总结摘要:21世纪是个信息与电子的世纪,智能电子则是电子行业以后发展的主导方向,他可以按照预先设定的模式在一个环境里自动的运作,不需要人为的管理。
本次的设计就是一辆智能的小车,采用AT89C52单片机作为小车的检测和控制核心;采用光电传感器和角度传感器取得外部信号,从而把反馈到的信号送单片机,使单片机按照预定的工作模式控制小车在跷跷板上按预定的方式行驶,采用数码管实时显示小车行驶的时间,本设计结构简单,较容易实现,但具有高度的智能化、人性化。
关键词:电动车跷跷板 AT89C52 单片机倾角传感器光电传感器一、方案比较与选定方案一:改装摇控电动车,利用单片机直接控制电动机,采用限位开关检测小车行驶位置。
由于小车是由单片机直接控制,所以驱动不了电机,实现不了小车的基本功能。
用限位开关不利于用小车的独立运行,且控制不便。
(框图如图1)限位开关单片机电动机(图1)方案二:自制小车,利用步进电机,采用单片机控制,用电位器自制角度传感器,自制小车,制作过程极其复杂,且时间紧张,没有较好的机械部件支持,步进电机不易购买,体积较大,供电系统复杂,价格昂贵。
自制传感器精度不高,反应不灵活,线性度太差。
无法实现角度与电阻的线性转换。
方案三:改装摇控电动车,利用单片机控制电动机驱动电路,使用脉宽调制的方式控制改装摇控小车,利用H桥驱动电机,使用大功率三极管以克服电机的驱动能力不足问题,采用脉宽调制方式对直流电机速度进行控制和调节,提高了其驱动能力。
采用光电耦合器对模拟和数字电路的有效隔离,增强控制部分的干扰能力。
采用倾角传感器和光电传感器检测小车平衡和运动位置。
系统方框图如图(2)所示。
综上所述,我们选用方案三。
在此系统中,我组所使用的核心部件是AT89C52单片机作为主处理器,由它进行信号的分析与处理,并由其进行数据的输出与对外部器件的控制。
AT89C52有8K字节可重擦写FLASH闪速存储器,可1000次擦写周期,全静态操作:0HZ―24HZ,三级加密程序存储器,256*8字节内部RAM,32个可编程I/O口线,3个16位定时/计数器,8个中断源,可编程串行UART通道,低功耗空闲和掉电模式。
电动车跷跷板设计

1 设计任务 与要求
1 . 1设计 任务 在给定 条件 的翘翘 板上 , 小 车 主 要 完 成从一 端出发 行驶至平衡 点附近 , 停 留一 定的时 间后开 始寻找平衡 点 , 达 到 平 衡 点 之后行 驶至终 点 , 停 留一 定 的 时 间后 返 回
终点 。 如 图1 所示 。
要 控 制 系统 达 到 平 衡 位 置 , 需 要 加 入 一 个 好 。 控制ห้องสมุดไป่ตู้。 方案一 : 采用 P I D控 制 器 。 P I D控 制 器 是 一 种 适 应 范 围广 的 控 制 算 法 。 可 以 达 3 系统 硬件设计 到 一 般 的控 制 要 求 。 跷 跷 板 的 平 衡 是 要 达 3 . 1 系统 的总 体设计 系统 总 体 框 图 如 图2 。 到 两 边 的 力矩 平 衡 。 小 车 行 驶 到 某 一 个 特 . 2 功能 模块设 计 定 的 位 置 才能 使 跷 跷 板 平 衡 。 方案二 : 采用 3
工 业 技 术
S C I E N C E&T E C H N O L O G Y .
匪圆
电动 车 跷 跷 板 设 计
王 贵山 刘 亚茹 ( 国防科 学技 术大 学机 电工程 与 自动 化学院 湖 南长 沙
4 1 0 0 0 3 )
摘 要: 本设 计主要 完成通过 控制 电动小 车的运 动来保持 翘 翘板 的平衡 , 整体采 用X  ̄ . M C U 结构。 跷跷板 上配 有倾 角传 感器 , 板 面以及 两端 贴有 黑线作 为循迹 和检 测起 点终 点的标 志 。 4 、 车配 有嵌入 式控 制芯 片MC 9 S I 2 XS 1 2 8、 灰度 循迹检 测模 块 , B T S 7 9 7 0 全桥 电机 驱 动l 电路 。
电动车跷跷板论文高毓锋

电动车跷跷板摘要本系统主要分为控制模块和检测模块,控制模块采用单片机对电动车进行全程控制,检测模块通过传感器进行检测。
使用双直流电机分别驱动电动车的左轮和右轮,使该电动车具有向前、向后、向左、向右行驶的基本功能,与此同时,在小车的运行过程当中,用LCD液晶显示屏实时显示电动车所用时间和平衡指示,通过一个阻值为2K的WDD35D-4精密导电塑料电位器对电动车地倾角进行检测,检测的数据通过单片机的IO接口传入单片机,单片机由此控制电动车的运动而使其能在跷跷板上保持平衡并通过中断技术使小车暂停行驶。
当电动车被放置在地面时,通过反射式光电传感器的检测使电动车驶上跷跷板。
关键词单片机、直流电机、传感器、占空可调脉冲一、系统方案与论证方案一:按照模拟电路的常规方法,以一个反馈电路为控制电路,可采用继电器来控制电机的转动,用角度传感器来采集小车行驶在跷跷板上面时车身的倾斜程度,可将其以一种反馈的形式输入控制电路,控制电路根据反馈的数据对电机的工作电压进行调整,同时,可通过光电传感器对木板上的黑线进行检测,通过返回不同的电平值告知控制电路电动车的位置,引导小车驶上木板。
但这种方案对元件精度要求较高,而且电路噪声较大,使得该方案很难实现。
方案二:使用可编程逻辑器件对系统进行控制,比起方案一可以较为便捷控制电机的转动的转速,WDD35D -4精密导电塑料电位器对小车的平衡进行数据采集,通过单片机对小车进行调整,让其能准确无误地找到平衡位置,同时采用中断技术使小车到达指定位置后暂停行驶,并将所用时间和平衡指示在LCD 上显示出来,在寻找木板地过程中,反射式光电传感器对路面进行检测,控制系统通过传感器所返回的电平(高电平或低电平)来控制电机的速度,使小车能顺利地驶上木板。
通过比较,显然方案二无论是从电路设计上,还是控制上说都要比方案一具有优势,所以我们选择方案二。
系统框图如图1.1所示图1.1系统框图二、理论分析与计算在整个系统,跷跷板上铺上白纸,白纸上画有跟小车宽度相同的黑线,用光电传感器检测路面黑线,行走轨迹如下图 用角度传感器来检测小车的平衡度。
电动车跷跷板设计

57科技资讯 S CI EN CE & T EC HNO LO GY I NF OR MA TI ON 工 业 技 术1 设计任务与要求1.1设计任务在给定条件的翘翘板上,小车主要完成从一端出发行驶至平衡点附近,停留一定的时间后开始寻找平衡点,达到平衡点之后行驶至终点,停留一定的时间后返回终点。
如图1所示。
2 方案比较与论证2.1各种方案比较与选择电机选择:为实现小车的运动,还有完成跷跷板的平衡调节,电机应该具有较好的灵敏度和动力。
方案一:直流电机,直流电机响应比较快,调节起来比较方便,价格也比较便宜,可以实现高速的选择。
但是力矩有一定的限制。
方案二:减速电机,减速电机驱动能力强,制动性也好,调节平衡比较方便,但是响应比较慢。
通过实践,直流电机速度快但是动力不强,制动性比较差,不能较好的实现平衡的调节,减速电机虽然反应慢,但是可以满足平衡的调节要求,因此选择减速电机。
倾角测量传感器:倾角是小车运行的控制量,它的准确获取才能使小车能够稳定地达到平衡,并且能够准确测量倾角,还能加大控制量。
方案一:倾角传感器,经测量倾角传感器灵敏度高,跷跷板两端采样值的差值20。
方案二:MMA7260三轴加速度计,该传感器可以测量重力延竖直方向上的分量,但是通过实际的检测发现其灵敏度低,且不稳定。
控制器的选择:对于一个不稳定系统,要控制系统达到平衡位置,需要加入一个控制器。
方案一:采用PID控制器。
PID控制器是一种适应范围广的控制算法。
可以达到一般的控制要求。
跷跷板的平衡是要达到两边的力矩平衡。
小车行驶到某一个特定的位置才能使跷跷板平衡。
方案二:采用步进法不断搜索平衡点,使系统达到平衡。
步进调节比较稳定。
由于倾角传感器的灵敏度的限制,控制量太小用PD控制器实现起来比较麻烦,而且参数的调节也不好控制,因此我们采用步进控制。
2.2控制算法设计采用步进控制,角度的变化量和长度的变化量均随时间而变,并且和各自速度相关,因此,引入小车每个控制周期的步进量 v ,和角度每个控制周期的变化量 ,假设速度控制的周期为T(ms),那么就有下面的式子合力钜: ()cos(T)f M G L v T M 合 (1)每个控制周期,先让小车走一段距离,停止一定时间测量角度,然后以这个角度为依据进行下一次平衡调节,如果所调的参数满足式子(1),那么跷跷板最终可以达到平衡。
电动车跷跷板设计方案

采用锂离子电池,具有高能量密度、长寿命和环保等优点。
电池选择
设计一种智能控制系统,实现电机的精确调速和电池的电量管理,以确保跷跷板的稳定运行和安全性。
控制系统
限速装置:设置限速装置,确保电动车跷跷板的行驶速度在安全范围内。
紧急停车装置:设置紧急停车按钮,以便在紧急情况下迅速停车。
通过以上设计方案的实施,我们将能够实现一种既安全又有趣的电动车跷跷板。这种创新型交通方式将为人们带来全新的出行体验,同时也有助于提升城市交通的多样性和趣味性。
手势控制
引入语音识别技术,允许用户通过语音命令进行操作,提供更加直观和便捷的人机交互方式。
语音控制
在操作界面上设置触控屏幕,用户可以直接通过触控屏幕进行操作,增加交互的灵活性。
触控屏幕
安全保护机制
防滑处理
便携性设计
易维护性
01
02
03
04
设计时应充分考虑使用安全,例如设置限位开关,避免电动车跷跷板超出安全范围。
电动车跷跷板设计方案
汇报人:
日期:
目录
引言总体设计方案关键技术与实现人机交互与界面设计测试、验证与评估总结与展望
01
CHAPTER
引言
近年来,随着电动车市场的不断扩大,电动车的技术和设计也在不断改进。然而,在行驶过程中,电动车仍存在一些平衡问题,特别是在复杂路况和高速行驶时。这些问题不仅影响了电动车的行驶稳定性,还可能给驾驶者带来安全隐患。因此,针对这一问题,我们提出了电动车跷跷板设计方案。
结构设计评估
评估所选材料的性能、成本和环保性。选择具有良好性能、成本低廉且环保的材料,以降低生产成本和环境负担。
材料选择评估
评估电动车与跷跷板的配合使用是否便捷、直观。优化人机交互设计,提高用户的使用体验和安全性。
关于多功能跷跷板的课题论文

实习报告目录第一章总述多功能跷跷板1.1 跷跷板的介绍1.2 人们对跷跷板喜好的调研与分析1.3 调研引发的设计思路第二章跷跷板设计的人机尺寸的调研与分析2.1 人体的平均尺寸2.2 跷跷板的尺寸分析2.3 总结分析第三章跷跷板材料色彩等相关元素的选择3.1 跷跷板的材料选择3.2 跷跷板的色彩选择第四章跷跷板情趣化的体现4.1 情趣化的含义4.2 翘翘板情趣化的体现4.3 产品设计中的情趣化要素表现第五章总结归纳,确定设计方向5.1 总结上述分析5.2 整体设计方向与思想第一章总述多功能跷跷板1.1跷跷板的介绍1.1.1跷跷板的简介跷跷板,又称为摇摇板,是指以某些东西作为支点,支撑著很长但十分狭窄的板在上方,让一方上升时,另一方下降的游戏。
这运用了杠杆原理,并且是儿童游乐场里的典型游戏。
在游乐场的设定里,这块板通常会被设置在正中,而两边则各坐一个人然后轮流以其脚踏地使自身的那边升上去。
而在游乐场里的跷跷板通常会有扶手让玩者抓牢。
而跷跷板最大的问题是如果一边的儿童比另一边的重很多的时候,当该较重的儿童突然用力踏地或坐下不愿踏地时,另一边的儿童可能会跌下并受伤。
而为了这个原因,跷跷板通常会安装在柔软的胶质地面上。
在狗狗灵敏赛里,跷跷板通常会设成不平衡使得参赛犬只在其上走过时,总是会以同一方降下地面。
跷跷板除了可以供儿童玩乐外,亦可作为在特技表演的工具。
而日常生活里,则可作为机械工具,这是因为跷跷板用了杠杆原理。
1.1.2跷跷板原理跷跷板原理是利用杠杆原理 ,人对跷跷板的压力是动力和阻力,人到跷跷板的固定点的距离分别是力臂。
重力加速度导致一上一下,高者重力加速度要大于低者,所以高者下降,同时在杠杆原理作用下将低者翘起来,如此循环。
1.1.3人们对跷跷板喜好的调研与分析不同的人对跷跷板的喜爱都有不同的看法。
跷跷板在造型和颜色中也可以千变万化,跷跷板设计便赋予了跷跷板变幻之彩,而传统意义上的跷跷板概念正在远离。
基于单片机的电动车跷跷板的设计

基于单片机的电动车跷跷板的设计IntroductionThe electric scooter is a popular mode of transportation for those who are looking for a convenient and eco-friendly way to travel short distances. However, one issue with electric scooters is that they can be difficult to balance, particularly when traversing uneven terrain or obstacles such as speed bumps. This problem can be addressed by the addition of a teeter-totter, also known as a seesaw, to the design. In this paper, we present a design for an electric scooter with a teeter-totter that is controlled by a microcontroller, specifically the Arduino Uno.DesignThe electric scooter consists of a metal frame with a small, electric motor in the front wheel, a battery pack mounted beneath the platform that the rider stands on, and a teeter-totter mounted on the rear axle of the scooter. The teeter-totter is made from two metal beams, each with a curved end that can be clipped onto the rear axle of the scooter. The two beams are connected by a hinge, which allows them to pivot up and down as the rider leans forward and back to accelerate or brake.A microcontroller, in this case the Arduino Uno, is used to control the teeter-totter. The microcontroller reads data from an accelerometer that measures the angle of the scooter in relation to the ground. If the scooter tilts forward, indicating that the rider is accelerating, themicrocontroller sends a signal to a servo motor that lowersthe teeter-totter on the rear axle, adding additional stability and balance to the scooter. Similarly, when the rider brakes and tilts backward, the microcontroller raises the teeter-totter to maintain balance.ResultsThe electric scooter with the teeter-totter was successfully designed and constructed. The teeter-totter was found to significantly improve the stability and balance of the scooter, particularly when traversing uneven terrain or speed bumps. The microcontroller was able to accurately read data from the accelerometer and control the teeter-totter accordingly.ConclusionThe addition of a teeter-totter controlled by a microcontroller is a promising design for improving the stability and balance of electric scooters. Further testing and refinement may be necessary to optimize the design for different types of terrain and riding conditions.。
电动车跷跷板论文讲解
2015年全国大学生电子设计竞赛电动车跷跷板(F题)【本科组】2015年7月25日摘要本方案以STM32F103RB单片机、直流电机驱动电路、MPU-6050、反射式红外传感器、稳压模块等电路构成。
小车采用前方的左中右三个反射式红外传感器,能沿着黑线在跷跷板上往返行驶,并始终保持在跷跷板上;同时,利用MPU-6050对小车当前所在位置的倾斜角进行测量。
小车控制程序主要对采集信号分析转换,结合PWM调速控制电机转速和转向,从而使小车快速在跷跷板上取得平衡;小车通过蜂鸣器来实现平衡指示以及实时显示,从而完成整个设计过程。
实验结果验证了该系统的性能满足设计要求。
关键词:STM32F103RB MPU-6050反射式红外传感器 PWM调速AbstractThe programs to STM32F103RB microcontroller, DC motor drive circuit, MPU-6050, reflective infrared sensor, voltage regulator modules and other circuits. Car used left, right in front of three reflective infrared sensor that can travel back and forth along the black line on a seesaw, and keep the seesaw; Meanwhile, MPU-6050 tilt angle of the trolley current location is measured. Car control program focuses on the acquisition signal analysis conversion, combined with PWM speed control motor speed and direction, allowing the car to quickly strike a balance on a seesaw; trolley buzzer to achieve balance through instructions and real-time display, thus completing the entire design process. Experimental results demonstrate the performance to meet the design requirements of the system.Key word: STM32F103RB MPU-6050 PWM SpeedReflective infrared sensor目录1系统方案 (1)1.1 姿态检测模块的论证与选择 (1)1.2 电机驱动模块的论证与选择 (1)1.3 稳压模块的论证与选择 (1)1.4 测量模块的论证与选择 (2)2系统理论分析与计算 (3)2.1 PID控制器设计 (3)2.2 基于卡尔曼滤波的数据融合 (3)3电路与程序设计 (4)3.1电路的设计 (4)3.1.1电路系统总体框图 (4)3.1.2 电源系统电路 (4)3.1.3 电机驱动模块电路原理图 (4)3.2程序的设计 (5)3.2.1程序流程图 (5)4测试方案与测试结果 (8)4.1测试方案 (8)4.2 测试条件与仪器 (8)4.3 测试结果及分析 (8)4.3.1测试结果(数据) (8)4.3.2测试分析与结论 (9)5总结 (9)附录 (10)1.电路原理图 (10)2.元器件清单 (12)3.主要源程序 (13)1系统方案本系统主要由姿态检测模块、电机驱动模块、测量模块、稳压模块、电源模块组成。
电子设计-电动车跷跷板
大学生电子设计竞赛电动车跷跷板参赛学生:学校:赛前指导老师:2012年9月电动车跷跷板摘要本设计采用两个凌阳SPCE061A 16位单片机作为控制核心。
其中一个安装在小车上,另一个持在使用者手中连接键盘和LCD,通过无线模块进行双机通讯,实现远程对小车运行状态的实时监测。
为了对小车的行为进行精确控制,采用步进电机进行驱动。
系统通过倾角传感器采集跷跷板的倾角变化后传给单片机。
程序控制方法采用PID算法,使小车通过一个二阶欠阻尼脉冲响应过程最后趋于动态平衡。
根据设计需要,车体采用有机玻璃与铝合金自制而成。
关键词:SPCE061A单片机,角度传感器,光电传感器,PID算法.Abstract:This system takes two SPCE061A 16 bit microprocessor as the control center, one fixed on the car and another connected with keyboard and LCD handed by the controller. In this system, wireless is used to complete the two processors` communication to acquire a perfect interface between the controller and the whole control system. The car with four wheels is driven by two stepper motors, and through the angle sensitive gathering the information about the teeterboard’s equinity condition and then send to the microprocessor. The system takes the PID as main control method, through a progress of two pulse damping response, the car and the teeterboard finally reach an equinity condition.Keywords: SPCE061A microprocessor, angle sensor, light sensor, PID.1.系统方案设计1.1实现方法采用倾角传感器检测跷跷板与水平面的夹角,通过PID算法控制小车寻找平衡位置。
电动车跷跷板制作与设计

电动车跷跷板制作与设计摘要:本电动车跷跷板是以吕合金为车架,msp430单片机为控制核心,加以步进电机、红外光电传感器、光耦传感器、倾角传感器、LCD数码光和电源电路以及其他电路构成。
系统由msp430通过IO口控制小车的前进后退停止平衡以及转向。
寻迹由ST188型红外光电对管完成,平衡由倾角传感器完成,用L298N 驱动步进电机,同时本系统用LCD数码管进行数字显示,以显示当前电动车的运动状态。
关键词:msp430 步进电机 L298N 红外光电传感器倾角传感器 LED数码管一.模块方案比较与设计根据题目要求,本系统主要由控制器模块、电源模块、寻迹传感器模块、平衡传感器模块、步进电机及其驱动模块、LCD数码管模块。
本系统的方框图如下图所示:为较好的实现各模块的功能,我们分别设计了几种方案并分别进行了论证。
1.1.1车架设计方案1:购买玩具电动车。
购买的玩具电动车具有组装完整的车架车轮、电机及其驱动电路。
但是一般的说来,玩具电动车具有如下缺点:首先,这种玩具电动车由于装配紧凑,使得各种所需传感器的安装十分不方便。
其次,玩具电动车的电机多为玩具直流电机,力矩小,空载转速快,负载性能差,不易调速。
而且这种电动车一般都价格不扉。
因此我们放弃了此方案。
方案2:自己制作电动车。
经过反复考虑论证,我们制定了三轮电动车,后面两轮分别驱动转向。
前面按一个万向轮。
即左右轮分别用两个转速和力矩基本完全相同的步进电机进行驱动,前面装一个万向轮。
这样,当两个步进电机转向相同但转速不同时就可以实现电动车的转弯,由此可以轻松的实现小车的左转和右转。
对于车架材料的选择,我们经过比较选择了铝合金。
用铝合金做的车架比塑料车架更加牢固,比铁制小车更轻便,美观。
综上所述,最后选择方案二。
1.1.2控制器模块本次比赛是由TI公司赞助,因此我们直接选用该公司开发的msp430 16位单片机,它是16位控制器,具有体积小、驱动能力高、集成度高、易扩展、可靠性高、功耗低、结构简单、处理速度高、中断处理能力强等特点。
跷跷板电动小车论文

作者:展烽 李志峰 王丽丽摘要本设计为使电动车在跷跷板上按要求准确运行系统以AT89C51作为电动车的控制核心,采用数字式红外光电传感器检测路面引导线,使小车按预定轨道行驶,使用SCA60C 角度传感器检测电动车倾角,控制电动车使其在跷跷板上达到动态平衡。
采用PWM 算法调速,小车走行实现闭环控制,使用PWM 算法控制小车使跷跷板平衡。
一、系统方案设计与论证1.系统总体设计根据题目的基本要求,设计任务主要完成电动车在规定时间内按规定路径稳定行驶,并能具有保持平衡功能,同时对行程中的有关数据进行处理显示。
为完成相应功能,系统可以划分为以下几个基本模块:电动机驱动模块、寻迹线探测模块、平衡状态检测模块、信息显示模块。
系统框图如图一所示:图1 系统框图单片机按一定的控制算法对采集的数据进行处理,得到控制量产生PWM 波,通过驱动电路实现小车的控制,使跷跷板平衡。
2.系统论证与论证(1)核心控制模块的选择方案一:采用ATMEL 公司的AT89C51。
51单片机价格便宜,应用广泛,控制简单,能够满足本系统的设计要求与精度,其性价比高。
方案二:采用凌阳公司的SPCE061A 单片机作为控制器的方案。
该单片机I/O 资源丰富,并集成了语音功能。
芯片内置JTAG电路,可在线仿真调试,大大简化了系统开发调试的复杂度。
根据本题的要求,以及性价比我们选择第一种方案。
(2)电机模块方案一:采用单片机PWM波控制直流减速电机。
这种方法的优点在于,能够对电机转速的上升与下降进行平滑调节,保证调节过程本身对跷跷板的影响最低,其价格便宜,应用广泛,性价比高。
方案二:用单片机控制步进电机。
由于步进电机是采用脉冲驱动,调速反应慢,不易于控制小车的行驶,价格相对直流电机比较贵。
根据本题的要求,以及性价比我们选择第一种方案。
(3)平衡检测模块角度检测模块也是系统的重要组成部分,我们需要利用角度传感器来测量跷跷板水平方向倾角,当倾角在某个范围之内的时候即可认为跷跷板达到平衡状态。
电动车

2007年J题电动车跷跷板为使电动车在跷跷板上按要求准确运行采用了单片机AT89C51最小系统作为电动车的检测和控制系统。
通过红外发射接收一体探头检测路面黑色寻迹线,使小车按预定轨道行驶,根据角度传感器检电动车跷跷板海军航空工程学院(青岛) 邵慧李文超孙庆洲摘要:本设计为使电动车在跷跷板上按要求准确运行采用了单片机AT89C51最小系统作为电动车的检测和控制系统。
通过红外发射接收一体探头检测路面黑色寻迹线,使小车按预定轨道行驶,根据角度传感器检测跷跷板的平衡状态控制电动车使其在跷跷板上达到动态平衡。
再加上基于AT89C51单片机的键盘、液晶显示电路,构成了整个系统的硬件总电路。
最后通过软件设计,实现了按预定轨道行驶、保持平衡等功能。
关键词:角度传感器平衡寻迹线红外发射接收一体探头AbstractIn order to let the Electromotion Dolly run on the teeterboard exactly, our design adopts SCM-AT89C51 least system as dolly's measure and control system. through examining the black trace by Infrared RayElectopult-receiver,to make the dolly run on the prearrange orbit.the other, bases on Angle Transducer,SCM examines the balance state of the teeterboard to control the Electromotion Dolly reach to balance on the teeterboard.We also introduced the keyboard based on AT89C51 SCM and fluiding crystal revealing electrocircuit,which constituents the chief hardware electrocircuit of the entire system .Finally,the function is realized including run on the orbit ,keep balance,etc,using software designment.Key word: Angle Transducer,balance, black trace,Infrared RayElectopult-receiver1.系统方案设计、比较与论证根据题目的基本要求,设计任务主要完成电动车在规定时间内按规定路径稳定行驶,并能具有保持平衡功能,同时对行程中的有关数据进行处理显示。
基于STM32的电动车跷跷板系统设计

基于STM32的电动车跷跷板系统设计摘要:介绍电动车跷跷板系统的设计与实现。
该系统包括单片机系统电路、寻迹检测电路、平衡检测电路、步进电机驱动电路、数码显示电路等。
在系统中,以STM32单片机为电动小车控制核心,使用反射式红外发射接收器来检测轨迹,步进电机作为动力源实现小车前进后退和转向控制,用2个水银开关控制完成平衡状态的检测,用数码管分阶段实时显示电动车行驶所用时间。
3次实验数据表明,这里所提出的平衡检测方案是有效可行的。
关键词:寻迹检测电路;步进电机;跷跷板系统;平衡检测电路。
一、引言全国大学生电子设计大赛的F题目是“电动车跷跷板”;题口要求设计并制作一个电动车跷跷板,使得电动小车从图1所示跷跷板起始端A出发在30 s内到达中心点C 并保持平衡5 s,之后在30 s内到达跷跷板末端B并停留5 s,最后在1 min内退回到起始端Ao在整个行驶过程中,电动车始终在跷跷板上,并分阶段实时显示电动车行驶所用的时间。
所要求平衡的定义为A, B两端与地面的距离差d =dA - dB不大于40 mm。
图1 电动车跷跷板示意图二、系统方案设计在系统设计中,根据竞赛要求电动小车设计车体长为20cm,宽为15cm,电动小车采用四轮驱动、调节驱动轮的快慢进行转向的方案,这种结构使得小车在运动时比较平稳。
STM32系列基于专为要求高性能、低成本、低功耗的嵌入式应用专门设计的ARM Cortex-M3内核。
按性能分成两个不同的系列:STM32F103 “增强型”系列和STM32F101 “基本型”系列。
增强型系列时钟频率达到72MHz,是同类产品中性能最高的产品:基本型时钟频率为36MHz,以16位产品的价格得到比16位产品大幅提升的性能,是16位产品用户的最佳选择。
两个系列都内置32K到128K的闪存,不同的是SRAM的最大容量和外设接口的组合。
时钟频率72MHz时,从闪存执行代码,STM32 功耗36mA,是32位市场上功耗最低的产品,相当于0. 5mA/MHzo STM32芯片如图2。
【精品】电动车跷跷板设计几种方案汇总与对比
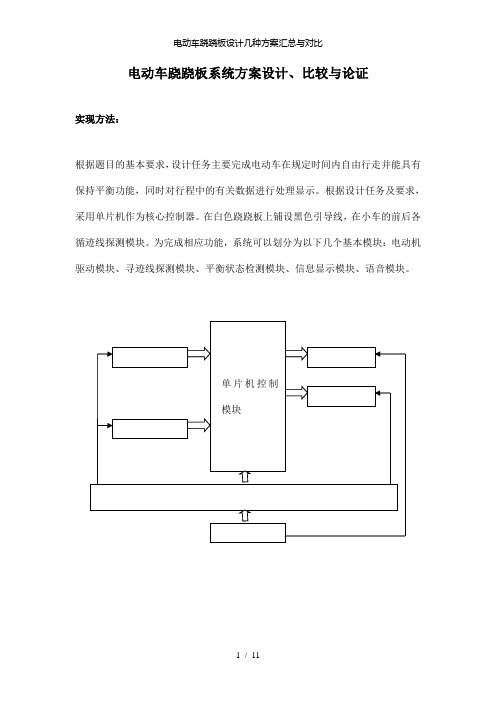
电动车跷跷板系统方案设计、比较与论证实现方法:根据题目的基本要求,设计任务主要完成电动车在规定时间内自由行走并能具有保持平衡功能,同时对行程中的有关数据进行处理显示。
根据设计任务及要求,采用单片机作为核心控制器。
在白色跷跷板上铺设黑色引导线,在小车的前后各循迹线探测模块。
为完成相应功能,系统可以划分为以下几个基本模块:电动机驱动模块、寻迹线探测模块、平衡状态检测模块、信息显示模块、语音模块。
控制模块主控芯片的选择方案:采用89C52单片机方案:采用AT89C51系列单片机作为控制的核心。
51单片机按单纯的控制和数据处理是比较经济实惠的,但是功能单一,并且51单片机需要仿真器来实现软硬件调试,较为烦琐。
如果系统需要增加语音播报功能,还需外接语音芯片,实现较为复杂;而且本项目触及到A/D转换和PWM控制,如果要具备这两个功能必须要有专用的A/D芯片和PWM控制电路,这无疑是提高了成本。
方案:使用89S51单片机。
价格便宜、程序资源丰富,控制简单,技术比较成熟,但运算速度慢、片内资源少、存储器容量小,难以存储大体积程序和实现复杂的算法。
不能直接进行数据采集,接口电路比较复杂。
方案:使用AT89S52单片机,AT89S52单片机采用CHMOS工艺及高密度、非易失性存储技术制造,内部包括1个8位CPU,1个片内振荡器及时钟电路,3个16位定时计数器,4个8位并行I/O口,8个中断源,1个可编程全双工串行口,8kB 可插除FLASH和256B的RAM,且内置看门狗电路,一旦程序跑飞则复位系统[2]。
因此,设计中采用8位AT89S52单片机负责系统的控制与协调工作,同时它还不断处理红外对管传感器送来的地面标志信号,这些信号主要控制小车的加速、减速、限速、刹车、倒车等状态。
此外,在系统设计中当利用片内的定时器作为小车行驶计时,并为LED驱动集成电路提供时钟和数据。
方案:采用凌阳16位单片机SPCE061A(30.21)作为控制的核心。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要本设计采用STC89C52单片机作为电动车在跷跷板上运行的检测和控制核心,路面的黑线、黑区、白区、斑马线区采用七个反射式红外传感器进行检测,完成设计所要求的上跷跷板、直行、停止、倒车。
采用五个光敏二极管完成跷跷板平衡位置的检测。
利用正反转控制技术、PWM技术动态控制电动车的运行情况,很好的实现了设计任务。
关键词: STC89C52单片机、电动小车、检测一、系统方案(一)实现方法与系统设计选用能够实现正、反转,双电动机驱动速度平稳的电动车。
根据题目要求制作出准确的黑白路线,用七个反射式光电传感器作为位置、方向的检测,由于光电传感器和光敏二极管的检测电路输出高电平在0.9V~3.8V之间。
为此采用LM358构成比较器进行整形,使检测输出信号逻辑性强。
用五个光敏二极管作为跷跷板的平衡检测,并以数字形式指示平衡状态。
以STC89C52单片机作为控制和定时部分,用PWM方法进行调速。
用图5 所示的电路作为电动机的驱动部分。
上述硬件电路在软件的配合下就能完成题目所要求的所有任务。
(二)方案论证根据设计题目要求,系统可以划分为几个基本的模块,如图1所示。
根据要求对的各模块的实现,分别有以下一些不同的设计方案:图1 总体方案框图1.电动机驱动调速模块方案一:采用继电器对电动机的转向进行控制,通过开关的切换对小车的速度进行调整。
这个方案的优点在于电路比较简单,缺点是继电器的响应速度慢、机械结构已损坏、寿命较短、可靠性不高。
● 方案二:采用电阻网络或数字电位器调整电动机得分压,从而达到调速的目的。
但是电阻网络只能实现有级调速,而数字电阻的元件价格比较昂贵。
更主要的问题在于一般电动机的电阻很小,但电流很大;分压不仅会降低效率,而且实现很困难。
● 方案三:采用有达林顿管组成的H 性PWM 电路。
用单片机控制达林顿管使之工作在占空比可调的开关状态,精确调整电动机的转速和方向的控制;电子开关的速度很快,稳定性也极强,是一种很广泛采用的PWM 调速技术。
基于上述理论分析,拟选择方案三。
2.路面探测模块路面探测大致原理是:光线照射的路面并反射,由于黑线和白纸的反射系数不同可根据接收到的反射光强弱判断是否是黑线和白纸。
● 方案一:可见光发光二极管与光敏二极管组成的发射-接收电路。
这种方案的缺点是其它环境光源会对光敏二极管的工作产生很大的干扰,一旦外界光亮条件改变,很可能造成误判断和漏判。
● 方案二:采用七个红外反射式传感器按右图所示安装在电动车的地盘上。
与附图一所示 的路面图配合,能够很容易实现电动车在路 面和跷跷板上的运动及始点、终点的检测。
经过对比以上二种方案,拟采用方 案二。
2. 跷跷板的平衡检测模块 ● 方案一:使用电位器来检测跷跷板的平衡。
方法是,电位器的轴固定在跷跷板上,电位器可以计算出跷跷板平衡时对应的电阻Rg 。
通过控制电动车正反转使测量的电阻值Rx 与Rg 大小近似相等,即可使跷跷板平衡。
但是在平衡点处转动的角度很小,使电位器输出的阻值变化量也很小,同时电位器的重复性不高,测量时难度很大。
● 方案二:使用编码器来检测跷跷板的平衡。
方法是,从跷跷板起始位置(A点着地)起到平衡位置的转动角度对应的编码器输出的脉冲数Ng 作为给定值,当输出脉冲数Nx 不等于Ng 时,则根据Z 信号来控制电动机的正反转,直至使跷跷板平衡为止。
但是,在平衡点处跷跷板微小的上下摆动使编码器输出信号变化的很复杂。
用以产生误判。
● 方案三:使用两对光电管来检测跷跷板的平衡。
(如图3)如图3很显然,跷跷板微小的上下摆动能够在跷跷板的两端产生较大位移。
按照本题目尺寸,跷跷板变化0.5度,其端点产生7毫米的位移。
其方法具体是:电动车从A 点向前行驶时,跷跷板在上光电管的上方,当跷跷板第一次阻挡住上光电管光时,说明跷跷板已经到达平衡区域,通过判断跷跷板在光电检测区的位置,调节电动车的运动方向,这样就可以控制跷跷板处于平衡状态。
另外还可以选用陀螺仪、电子水平仪等来检测跷跷板的平衡。
综合比较上述方案后,选择方案三。
二、 理论分析与计算(一) 测量与控制方法1.电动机运行方向和位置的测量如附图一所示的路线图,在跷跷板上运行。
从A 点通过D1、D3的检测来控制电动车又转、左转、直行,使电动车作直线运动,同时开始计时,显示到达C 点的时间,开始保持平衡点的5秒,显示从C 点到B 点的运行时间,然后继续前进,当D1、D2、D3检测到B ’点开始减速,检测到B 点时停车。
保持5秒后,通过检测D5、D7直线倒车,当第二次D5、D6、D7同时检测到黑线时,表示到达A 点。
如图所示的反射式光电管安装尺寸图(装在电动车的底部)。
2.电动车如何从地面上跷跷板如附图一所示,把地面区分为黑区、白纸区和斑马线区。
当电动车的检测到D1~D7全为暗时说明是在黑区,让电动车向右行驶,当D1、D2、D3均为亮时,说明到达白区,控制电动车调整到D4和D6也在白区,直行即可走上跷跷板。
当电动车在斑马线区时D1~D7不全暗让电动车向左行驶,当D1、D2、D3均为亮时,说明到达白区,控制电动车调整到D4和D6也在白区,直行即可走上跷跷板。
(二) 理论计算直流电动机转速n 的表达式为Φ-=K IRU n ………………………………………(1) 式中:U ――电枢端电压; I――电枢电流;R――电枢电路总电阻; Φ――每极磁通量;图4所示为利用开关管对直流电动机进行PWM 调速控制的原理图和输入输出电压波形。
当三极管的基极输入高电平时,开关管导通,直流电动机电枢绕组两端有电压Us 。
t1秒后,基极输入变为低电平,开关管截止,电动机电枢两端电压为0。
t2秒后,基极输入重新变为高电平,开关管的动作重复前进的过程。
这样,对应着输入的电平低,直流电动机电枢绕组两端的电压波形如图所示。
电动机的电枢绕组两端的电压平均值U0为s s U U Tt t t Us t U α==++=121010 (2)式中:α――占空比,α=t1/T 。
占空比α表示了在一个周期里,开关管导通的时间与周期的比值。
α的变化范围为10≤≤α。
由式2可知,当电源电压Us 不变的情况下,电枢的端电压的平均值U0取决于占空比α的大小,改变α值就可以改变电压的平均值,从而达到调速的。
脉宽调采用定频率方式。
系统中的定斩波频率为20Hz ,而周期T=50ms 。
软件中利用定时的T2实现脉冲宽调制。
如图所示,设占空比为α,即α=t1/T , t1=T*α单片机晶振为12Hz ,T2工作于定时器方式,则在输出为高电压t1期间,定时器T2的定式时间常数为:αα⋅-=⨯⋅-=T T N 1000655361023161。
当T2定时到,再设定时器T2定时时间为t2。
而时间常数()()αα-⋅-=⨯--=110006553610123162T T N 。
PWM 斩波控制程序如下:MOV T2CON,#00H ;T2工作与定时器方式 SETB ET2MOV TH2,#N1H MOV TL2,#N1L SETB TR2 SETB EASETB P2.1 ;脉冲调制波输出 SETB 03H ; 位03H 为标志位 ……VCCD电动机图4成一座“桥”,实现了对驱动电机的轻松控制。
电机驱动电路如图5所示,其控制过程如下(P1.0为正反转控制端,P1.1为启停止控制端)。
电机的运行:当P1.0为低电平时,则Q7基极为低电平,由Q1构成的反向器使Q1集电极为高电平。
于是,Q2、Q3、Q4导通,Q5、Q6、Q7截止。
其中Q2为激励级,Q3、Q4为功放级。
电流从+9v经Q3到电机“+”端再到“-”端最后经Q4入地端,电机正转。
当P1.0为高电平时,则反之,Q5、Q6、Q7导通,Q2、Q3、Q4截止,电机反转。
当P1.1为低点平时 Q1集电极和Q5基极均为低电平,电机停转。
该“桥”的优点是原理简单、易控制、带负载能力强,在单片机的配合下,通过脉宽整流的方法,实现了对驱动电机的轻松调速,可以使电动车适应各种不同的电源。
2.路面探测模块发光管、光电管驱动电路如图6所示,小车在运动过程中,发光管发光并反射由光电管接受,产生使放大器的正向电压变化,经过电压比较器整形后送至单片机进行处理。
图6 光电检测原理图(二)总体电路图见附图二所示(三)软件设计与工作流程图软件主要由工作流程图来说明,系统工作流程图如附图三所示。
四、结果分析(一)结果实现1.经过测试,从A点出发22秒行驶到C点附近。
2.10秒钟跷跷板保持平衡。
3.15秒行驶到B点处。
4.32秒回到A点。
5.分阶段时间显示清楚。
6.平衡状态时,A、B两端与地面的距离差d=|dA-dB|<32mm,并有数字声光指示。
(二)创新发挥1.距A点600mm的位置上,电动车准确自动上跷跷板。
2.在跷跷板上,取得平衡保持10秒以上。
3.重新移动配重块,电动车又取得平衡,保持10秒以上。
4.上述过程在两分26秒完成任务。
5.平衡状态时,A、B两端与地面的距离差d=|dA-dB|<32mm,并有数字声光指示。
五、参考文献1.王小明.电动机的单片机控制.北京航空航天出版社.2002.052.何立民.MCS-51系列单片机应用系统设计. 北京航空航天出版社.1990附图一:电动车引导图:附图二:总电路图:附图三:主程序流程图基本功能流程图:发挥功能程序流程图:- 11 -。