电动车跷跷板说明书(1)
电动车跷跷板设计方案
电动车跷跷板设计方案1. 引言电动车作为一种环保、经济、便捷的交通工具,在城市中越来越受到人们的欢迎。
随着电动车使用的普及,对电动车的性能和舒适性需求也越来越高。
其中,车辆的悬挂系统是决定乘坐舒适性的关键因素之一。
本文将重点介绍电动车跷跷板设计方案。
2. 跷跷板的作用电动车的跷跷板是连接前后轮的重要部件,它在路面不平的情况下起到缓冲和减震作用,提高骑行的舒适性和稳定性。
合理的跷跷板设计能够降低车身的颠簸感,提高乘坐舒适性和操控性。
3. 跷跷板设计需考虑的因素在设计电动车跷跷板时,需要考虑以下因素:3.1 材料选择跷跷板需要具备足够的强度和耐久性,以应对恶劣的路面条件和长时间使用带来的疲劳等问题。
常见的跷跷板材料包括铝合金和碳纤维等。
铝合金具备较高的强度和刚性,而碳纤维材料则轻量且具备良好的振动吸收能力。
3.2 结构设计跷跷板的结构设计需要考虑到整车的重心、空间限制和悬挂系统的类型等因素。
合理的结构设计可以降低车辆的重量,并提高整车的稳定性和行驶的舒适性。
3.3 减震系统跷跷板作为车辆的减震系统之一,需要考虑到减震效果和调校。
通过合理的减震系统设计,可以降低车身的颠簸感,提高骑行的舒适性。
4. 设计方案基于以上考虑因素,本文给出以下电动车跷跷板设计方案:4.1 材料选择采用铝合金材料作为跷跷板材料。
铝合金具备优秀的强度和刚性,同时具有较好的耐腐蚀性和耐久性,适合应对各种路面条件。
在材料选择上,还可以考虑采用碳纤维增强的铝合金,以进一步提高载荷能力和减震效果。
4.2 结构设计跷跷板的结构设计应该考虑到整车的重心和空间限制。
可以采用H 型结构设计,将重力分散到两侧,提高整车的稳定性。
在空间限制允许的情况下,还可以考虑增加三角支撑等结构,提高跷跷板的刚性和稳定性。
4.3 减震系统跷跷板需要配备减震系统,以提高骑行舒适性。
可以采用液压减震器或弹簧减震器,根据不同的需求进行选择。
减震系统还可以根据用户的体重和骑行环境进行调校,以获得最佳的减震效果。
电动车跷跷板设计方案

电动车跷跷板设计方案电动车跷跷板是一种创新性的设计,可以帮助人们更方便地停靠和启动电动车。
在许多城市,电动车已经成为主要的出行方式。
然而,电动车在停车时,需要使用力量将车辆托起或降下,这对于一些年纪较大或身体不适的人来说可能会很困难。
因此,电动车跷跷板是一项非常有用的发明,能够让电动车的停放更加容易和便捷。
一般来说,电动车跷跷板有两种设计方案:手动操作和自动操作。
手动操作的设计需要用户手动旋转跷跷板,以将电动车推起或降下。
这种设计成本较低,但用户需要一定的力量和技能才能轻松完成操作。
另外,手动操作的设计需要更多的时间和精力,不太适合老年人或身体有残疾的人。
自动操作的设计是一种更加先进和高级的设计,它利用电动机和控制器来完成跷跷板的升降操作。
用户只需要轻按按钮或开关即可完成整个过程。
自动操作的设计有多种控制方式,包括遥控器、传感器和自动识别系统等等。
这种设计的成本更高,但用户可以省去很多时间和精力,使用起来非常方便。
除了操作方式的不同,电动车跷跷板的设计还有很多其他的特点。
比如,电动车跷跷板的材料可以采用钢板、铝合金、塑料等多种材质,不同的材料有着不同的优势和劣势,需要根据风险防范、耐用性、安全性和成本等多个因素来选择。
电动车跷跷板的设计还可以增加一些额外的功能,如夜视灯、加热器、视音频系统等等,这些增强功能可以使车辆的停放更加智能化和便捷。
除了以上提到的基本设计特点,为了满足不同用户的需求和喜好,电动车跷跷板还可以增加一些个性化的设计元素。
比如,可以在跷跷板表面印上个性化的图案或标志,让用户可以将自己的电动车个性化地装扮起来。
此外,电动车跷跷板的外形和尺寸也可以根据用户需求进行定制。
在选择电动车跷跷板方案时,需要考虑很多因素,如成本、设计和效果等等。
这些因素关系到电动车跷跷板的使用效果和意义,也与对于产品的整体评估有关。
因此,我们需要在设计电动车跷跷板时,充分考虑不同用户的需求和喜好,以期为用户提供最佳的使用体验。
跷跷板小车制作
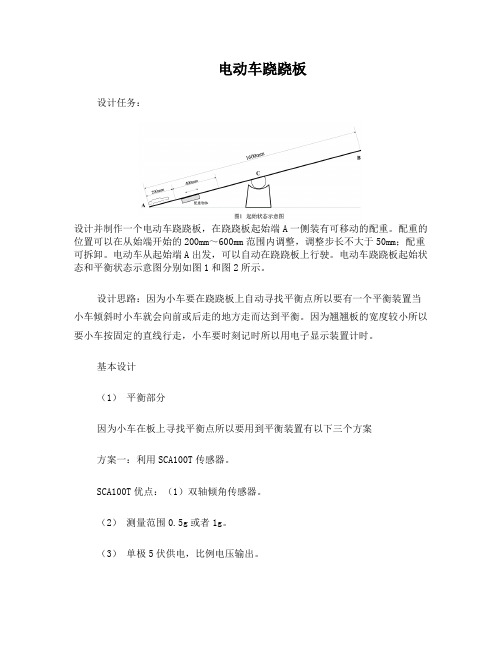
电动车跷跷板设计任务:设计并制作一个电动车跷跷板,在跷跷板起始端A一侧装有可移动的配重。
配重的位置可以在从始端开始的200mm~600mm范围内调整,调整步长不大于50mm;配重可拆卸。
电动车从起始端A出发,可以自动在跷跷板上行驶。
电动车跷跷板起始状态和平衡状态示意图分别如图1和图2所示。
设计思路:因为小车要在跷跷板上自动寻找平衡点所以要有一个平衡装置当小车倾斜时小车就会向前或后走的地方走而达到平衡。
因为翘翘板的宽度较小所以要小车按固定的直线行走,小车要时刻记时所以用电子显示装置计时。
基本设计(1)平衡部分因为小车在板上寻找平衡点所以要用到平衡装置有以下三个方案方案一:利用SCA100T传感器。
SCA100T优点:(1)双轴倾角传感器。
(2)测量范围0.5g或者1g。
(3)单极5伏供电,比例电压输出。
(4)长期稳定性非常好。
(5)高分辨率,低声,工作温度范围广。
缺点:灵敏度太高,价格昂贵,抗干扰能力差。
方案二:利用水银开关。
优点:(1)价格低,容易买到。
(2)制作方便,操控性好。
(3)工作范围广缺点:不稳定,水银液体不太容易控制。
方案三:利用旋转型可调电阻和铅坠。
优点:(1)价格低,容易组装。
(2)操控性好,灵敏度高。
(3)可以利用电阻的变化算出倾斜角。
缺点:有摩擦影响,受外界影响。
综上所述:经比较方案三比较好实验室中可以找到所用器材,可以通过电阻的变化算出倾角,价格较为便宜。
方案三的具体方法:首先将可变电阻的旋钮与铁杆连接起来,铁杆的另一端是较重的铅锤。
当小车的倾角变化时由于铅锤的重力作用在小车的带动下可变电阻的阻值产生变化,电压或电流发生变换传给单片机从而控制小车来找平衡点。
平衡装置原理图:(2)小车寻路装置:方案一启发:利用小车红外向寻路装置,可以让小车沿黑线在桥面上行走,当小车找到平衡点时小车自动停止,当小车到达桥的尽头是黑线消失小车停止倒行,这样可以防止小车一直沿直线行走能掉下桥。
方案二可以在小车两侧按上传感装置让小车不能掉下桥去。
电动车跷跷板设计

57科技资讯 S CI EN CE & T EC HNO LO GY I NF OR MA TI ON 工 业 技 术1 设计任务与要求1.1设计任务在给定条件的翘翘板上,小车主要完成从一端出发行驶至平衡点附近,停留一定的时间后开始寻找平衡点,达到平衡点之后行驶至终点,停留一定的时间后返回终点。
如图1所示。
2 方案比较与论证2.1各种方案比较与选择电机选择:为实现小车的运动,还有完成跷跷板的平衡调节,电机应该具有较好的灵敏度和动力。
方案一:直流电机,直流电机响应比较快,调节起来比较方便,价格也比较便宜,可以实现高速的选择。
但是力矩有一定的限制。
方案二:减速电机,减速电机驱动能力强,制动性也好,调节平衡比较方便,但是响应比较慢。
通过实践,直流电机速度快但是动力不强,制动性比较差,不能较好的实现平衡的调节,减速电机虽然反应慢,但是可以满足平衡的调节要求,因此选择减速电机。
倾角测量传感器:倾角是小车运行的控制量,它的准确获取才能使小车能够稳定地达到平衡,并且能够准确测量倾角,还能加大控制量。
方案一:倾角传感器,经测量倾角传感器灵敏度高,跷跷板两端采样值的差值20。
方案二:MMA7260三轴加速度计,该传感器可以测量重力延竖直方向上的分量,但是通过实际的检测发现其灵敏度低,且不稳定。
控制器的选择:对于一个不稳定系统,要控制系统达到平衡位置,需要加入一个控制器。
方案一:采用PID控制器。
PID控制器是一种适应范围广的控制算法。
可以达到一般的控制要求。
跷跷板的平衡是要达到两边的力矩平衡。
小车行驶到某一个特定的位置才能使跷跷板平衡。
方案二:采用步进法不断搜索平衡点,使系统达到平衡。
步进调节比较稳定。
由于倾角传感器的灵敏度的限制,控制量太小用PD控制器实现起来比较麻烦,而且参数的调节也不好控制,因此我们采用步进控制。
2.2控制算法设计采用步进控制,角度的变化量和长度的变化量均随时间而变,并且和各自速度相关,因此,引入小车每个控制周期的步进量 v ,和角度每个控制周期的变化量 ,假设速度控制的周期为T(ms),那么就有下面的式子合力钜: ()cos(T)f M G L v T M 合 (1)每个控制周期,先让小车走一段距离,停止一定时间测量角度,然后以这个角度为依据进行下一次平衡调节,如果所调的参数满足式子(1),那么跷跷板最终可以达到平衡。
跷跷板使用说明

跷跷板使用说明跷跷板是一种常见的儿童游乐设施,它不仅能提供孩子们乐趣,还能锻炼他们的协调性和平衡感。
为了确保使用者的安全和正常使用,以下是关于跷跷板的使用说明:1. 选择合适的场地和设施在使用跷跷板之前,确保所选择的场地平坦且没有障碍物,以确保跷跷板能够运转自如。
此外,跷跷板上应没有破损或不稳定的部件,以确保使用的安全性。
2. 小心平衡调整当两名玩家位于跷跷板两端时,需要小心进行平衡调整。
较轻的一方应向前或向后移动自己的位置,以平衡重量,避免跷跷板倾斜过度。
保持平衡有助于预防跷跷板的不稳定或猛烈弹起,从而避免潜在的意外发生。
3. 穿着适当的鞋子为了避免受伤或滑倒,使用者应该穿着合适的鞋子,如运动鞋。
尽量避免穿着拖鞋或裸脚玩耍,因为这可能会导致脚部滑动或脚趾夹伤。
4. 均衡分配玩家在多人玩耍跷跷板时,应根据体重和年龄分配玩家的位置。
较重或较大的参与者应该到跷跷板的中央,而较轻或较小的参与者应在两端。
这有助于保持平衡和稳定。
5. 聚焦玩耍,避免干扰当跷跷板在使用时,其他人应避免在其周围干扰或插手,以免影响玩家的平衡。
观看跷跷板的家长或监护人应该站在安全距离处,以便及时提供帮助或紧急情况下的干预。
6. 注意安全坐姿玩家应该采取正确的坐姿,将臀部紧贴跷跷板并握住稳定的扶手。
双脚应着地,并且注意腿部不要过于张开,以避免脚趾被夹住或滑脱。
7. 遵守使用规则在使用跷跷板时,请遵守相应的使用规则。
不要尝试进行危险的动作,如跳跃或从跷跷板上猛烈冲下来。
保持稳定和谨慎使用是避免事故的关键。
总结:跷跷板是一项有趣且锻炼协调能力的儿童游乐设施。
然而,在使用跷跷板时,我们应该遵守一些安全准则,包括选择合适的场地和设施,小心平衡调整,穿着适当的鞋子,均衡分配玩家等。
通过这些措施,我们能够确保使用者的安全,减少事故发生的风险,让孩子们能够享受到跷跷板带来的快乐和健康的身体锻炼。
希望以上的使用说明能够对您有所帮助。
电动车跷跷板

五、测试方案及测试表
A-C T(s) 达到 平衡 时间 (s) <60
C点附近 平衡两 端高度 差(mm) ≤40 平衡 维持 时间 (s) 5
C-B T(s)
B
B-A
距离 停车 T(s) 末端 (s) (mm) ≤50 5 <60
<30
<30
五、测试方案及测试表
达到平衡 能否上 板 高度差 维持时 (mm) 间(s) ≤40 ≥5
四、实验步骤及内容
四、实验步骤及内容
2 PWM控制和模糊控制算法 PWM即通过对占空比的控制达到改变速度 的目的。所以很容易地实现了上坡和粗调时行驶 速度快,而接近平衡和细调时速度中等。 采用模糊控制算法分段逐次逼近平衡点。假设 目标角度值为E0,当前角度值EN。与目标值的 差值为:E=EN-E0,与目标值的差值的绝对值为: ABS(E)=|E|。
重新达到平衡 高度差 (mm) ≤40
运行总时 间s) 维持时间 (s) ≥5 ≤180
LOGO
二、实验原理
系统实现方框图
三、实验器材
直流稳压稳流电源
SG1733SB3A
双踪数字示波器 Tektronix TDS1002
实 验 器 材
数字信号源
Agilent 3息采集和电机驱动 角度测量电路主要由角度传感器和A/D组成, 用于实时角度信息采集;光电检测电路主要由光 电检测器ST188和电压比较器LM339组成,用于 小车的循迹、定位和保护;电机驱动电路由L298 和光耦隔离芯片TLP521-2组成,用于提供一个低 干扰的强劲动力系统。
四、实验步骤及内容
编号 1 2 3 4 5 6
控制条件 IF(E>0) IF(E<0) IF(ABS(E) >=A1) IF(ABS(E) >=A2) IF(ABS(E) >=A3) IF(E=0) || (E<DELTA_E))
电动车跷跷板
起 始端 A , 动 车 能分 别显 示 前 进 和 倒 退 有二 十 分 钟 左右 , 电 之后 必须 对 电池 充 电。 3 2 驱 动 电路 行 驶 在 1 5 钟 内 完成 。 .分
( 重物 体 位 置不 限制 ) 电动 车 从起 始端 A 配 , 出 发 , 驶 跷跷 板 的 全程 。 停 止 5秒 后 , 行 电 动车 再 从 跷跷 板 的 B端 倒退 回至 跷跷 板 的 起 始端 A , 动 车 能 分 别显 示 前 进 和 倒 退 电 退行 驶 在 2分 钟 内完 成 。
AT8 S5 2主 要 实 现 对 翘翘 板上 黑 线 9 的软 件 检测 和 纠 缠 , 储 并 显 示 小 车 在 不 存
采 用 具 H 桥 的 L 92 驱 动 芯 片 和 同阶 段保 完 成 任 务 所 用 的 时 间 , 3D 以及 在 平 位 施 密 特 反 向 器 构 成 了 驱 动 电路 , 电 路 两 位 编 码 器 对 不 同 操 作 任 务 进 行 编 码 , 使 更稳 定 。L 9 B的 内部 有 两个 可选 择 的导 “ 0 23 0 进 入 基本 要 求 1的控 制 系统 ,“ l 0 ”进
3 3 黑 线检 测模 块 .
探 测 路 面 黑 线的 原 理 是 :光 线 照射 到 分 程 序 部 分 没 有 做 的 很 好 , 致 小 车 不 能 导 不 同可 根 据 接受 到 的 反 射 光的 强 弱 判断 是
板 达 到 平衡 时 , 保持 时 间 不小 于 5秒 , 同时 路 面 并 反 射 , 于 黑 线和 自纸 的反 射 系 数 由
通通 道 分 别 控制 后 轮 电机正转 和 反 转两 种 入基 本要 求 2的控 制 系统 ,“ 0”进 入发 挥 l 状 态 。一 片 L2 93可 以 分 别控 制 两 个直 流 部 分 l 的控 制 系统 ,“ 1 I ”进 入 发挥 部分 2
电动车跷跷板报告.doc
电动车跷跷板报告电动车跷跷板报告【摘要】本系统采用遥控电动小汽车改装而成,主要由89C52和模拟电路为核心器件,实现对智能电动车行驶的自动控制。
整车长23 厘米,宽5厘米,运行性能良好,符合设计要求。
电动车平衡检测使用倾角传感器。
电动智能小车电路由平衡检测电路、计时显示电路、电机驱动电路等组成,它不需要遥控就能按要求行走。
一、方案的选择与论证根据题目要求,系统可以以划分为几个基本模块,如图1.1所示键盘检测平衡检测单片机电机驱动显示电路图1.1 1、步进电机驱动调速模块方案一采用与步进电机相匹配的成品驱动装置。
使用该方法实现步进电机驱动,其优点是工作可靠,节约制作和调试的时间,但成本很高。
方案二采用集成电机驱动芯片LA298。
采用该方法实现电路驱动,简化了电路,控制比较简单,性能稳定,但成本较高。
方案三采用互补硅功率达林顿管ULN2003实现步进电机的驱动。
采用该方法实现步进电机的驱动,电路连接比较简单,工作也相对可靠,成本低廉,技术成熟。
基于上述理论分析,最终选择方案三。
2、平衡检测模块方案一采用精密的倾角传感器,这种传感器对应每个角度输出一个固定电流。
可以实现精确控制,但价格昂贵。
方案二采用简易的倾角传感器,它直接输出一个开关量。
当其与地面垂直时,两触点断开;若倾斜角度超出一定范围,两触点短接。
这种传感器价格低廉,使用方便。
基于上述分析,最终选择方案二。
3、显示模块方案一采用数码管显示。
数码管具有经济、低功耗、耐老化和精度比较高等优点,但它与单片机连接时,需要外接存储器进行数据锁存。
此外,数码管只能显示少数几个字符。
方案二采用LCD进行显示。
LCD具有功耗低、无辐射、显示稳定、抗干扰能力强等特点,而且可以显示汉字。
考虑到本次设计的人性化设计,综合考虑,决定采用方案二。
4、电源选择考虑到本次设计对电源的要求,我们采用四节1.5V的干电池作为供电电源。
二、系统的具体设计与实现系统的组成及原理框图如图所2.1示。
电动滑板车说明书让您了解电动滑板车的操作方法和安全注意事项

电动滑板车说明书让您了解电动滑板车的操作方法和安全注意事项电动滑板车操作方法和安全注意事项欢迎您购买电动滑板车。
为了让您更好地了解电动滑板车的操作方法和安全注意事项,本说明书将为您详细介绍。
一、电动滑板车的基本操作方法1. 开关与充电:- 按下滑板车上的开关按钮,待显示屏亮起后,滑板车即可启动。
关闭滑板车时,长按开关按钮。
- 充电前,请确保滑板车开关已关闭。
连接充电器并插入插座,充电指示灯将亮起,待充电指示灯熄灭,即可断开充电器。
2. 加速与刹车:- 使用手柄上的油门,向前推动手柄可加速滑板车的行驶速度。
请适度加速,避免过快速度导致危险。
- 使用刹车杆来刹车,向后拉动刹车杆可减速或停止滑板车的运动。
请谨慎使用刹车,避免急刹导致滑行不稳。
3. 转弯与倾斜:- 滑板车采用左右转向的方式进行转弯。
请通过身体微调重心,向左或向右倾斜来实现转弯操作。
- 在转弯过程中,请注意平衡,避免过大倾斜,以免摔倒或滑行不稳。
4. 紧急停止与低速模式:- 当遇到紧急情况时,可按下滑板车上的踏板以切断电源,迅速停止滑板车。
- 一些滑板车还配有低速模式,通过按下相应按钮可以降低滑板车的最高速度,确保安全行驶。
5. 防滑与骑行姿势:- 滑板车上配备防滑踏板,请确保踩在防滑踏板上,以确保脚部稳定。
- 骑行时,请保持身体平衡,双脚分别踩在踏板上,并保持骑行姿势放松而不僵硬。
二、电动滑板车的安全注意事项1. 佩戴安全装备:- 在骑行电动滑板车前,请佩戴头盔、手套及合适的保护装备,以减少在事故中可能遇到的风险。
2. 注意周围环境:- 在行驶电动滑板车时,请注意观察周围环境,避免与其他车辆、行人或障碍物发生碰撞。
3. 遵守交通规则:- 使用电动滑板车时,请遵守当地交通规则。
行驶在人行道上时,请尊重行人的权益,保持适当的速度。
4. 注意路况:- 在不平坦的道路上行驶时,请减速谨慎。
避免通过颠簸、起伏等路段,以免影响行驶安全。
5. 不骑行陡坡:- 请避免在过于陡峭的坡道上骑行电动滑板车,以减少行驶过程中失控的风险。
2008电动车跷跷板设计讲课用01
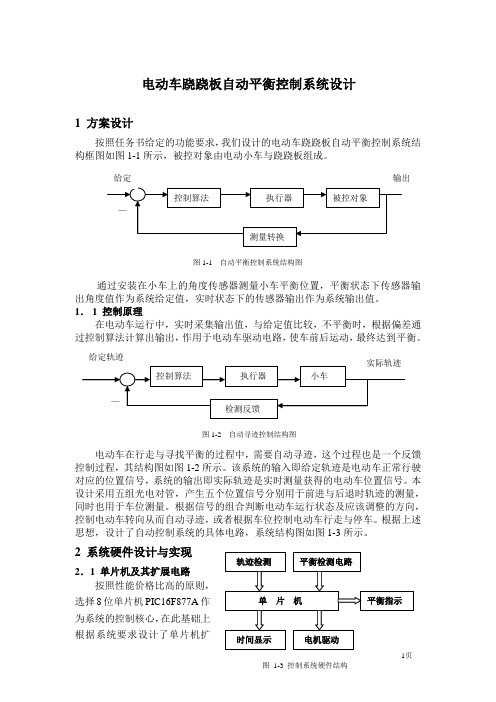
电动车跷跷板自动平衡控制系统设计1 方案设计按照任务书给定的功能要求,我们设计的电动车跷跷板自动平衡控制系统结构框图如图1-1所示,被控对象由电动小车与跷跷板组成。
通过安装在小车上的角度传感器测量小车平衡位置,平衡状态下传感器输出角度值作为系统给定值,实时状态下的传感器输出作为系统输出值。
1. 1 控制原理在电动车运行中,实时采集输出值,与给定值比较,不平衡时,根据偏差通过控制算法计算出输出,作用于电动车驱动电路,使车前后运动,最终达到平衡。
电动车在行走与寻找平衡的过程中,需要自动寻迹,这个过程也是一个反馈控制过程,其结构图如图1-2所示。
该系统的输入即给定轨迹是电动车正常行驶对应的位置信号,系统的输出即实际轨迹是实时测量获得的电动车位置信号。
本设计采用五组光电对管,产生五个位置信号分别用于前进与后退时轨迹的测量,同时也用于车位测量。
根据信号的组合判断电动车运行状态及应该调整的方向,控制电动车转向从而自动寻迹,或者根据车位控制电动车行走与停车。
根据上述思想,设计了自动控制系统的具体电路,系统结构图如图1-3所示。
2 系统硬件设计与实现2.1 单片机及其扩展电路按照性能价格比高的原则,选择8位单片机PIC16F877A 作为系统的控制核心,在此基础上根据系统要求设计了单片机扩展电路。
主要包括时间显示、平衡状态指示及其输入输出接口。
PIC 系列单片机指令系统精练,它可以实现在线调试和在线编程。
PIC 单片机内集成了上电复位电路、I/O 引脚上拉电路、看门狗定时器等,对于本设计来讲,利用其片内集成的10位A/D 电路,可以最大程度地减少外接器件。
2.2 电机驱动模块的电路设 计与实现本系统电动车驱动使用直流电动机,采用H 型驱动电路,电压控制采用PWM 方式以方便调速。
这种电路由于工作在管子的饱和或截止状态下,效率非常高,有利于节省能源。
该电路电子开关的速度很快,稳定性也很强,可以简单的实现转向控制。
电动车跷跷板
电动车跷跷板摘要:本系统采用AT89S52作为主控制芯片,再加上黑白传感器、角度传感器等传感器,完成了规定时间内定点停车、保持平衡,倒车至指定位置、能够沿直线行进基本的功能。
关键词:AT89S52,黑白传感器,角度传感器。
Abstract: This system with AT89S52 for core controller, realization pass to add Black-and-white sensor, Angle Sensors and LCD. To spread feeling to equip completion provision time to be a little bit already decided parking and hold the balance in refit behind small car bodywork towards refitting behind commonly the intelligence of the car control, reverse the car to appointed position, advance along the straight lineof essential function.Keyword: AT89S52, Black-and-white sensor, angle sensor.目录1.系统方案 (4)1.1 微控制器模块 (4)1.2车体设计 (4)1.3电机模块 (5)1.4电机驱动模块 (5)1.5寻迹传感器模块 (5)1.6 角度传感器模块 (6)1.7电源模块 (6)1.8显示模块 (6)1.9最终方案 (6)2.主要硬件电路设计 (7)2.1电机驱动电路的设计 (7)2.2黑白线检测电路的设计: (7)2.3角度检测电路的设计: (8)3.软件实现 (9)3.1理论分析 (9)3.2总体流程图 (9)3.3直线调节流程图 (10)3.4平衡调节流程图 (11)3.5返回流程图 (12)4 .系统理论分析及计算.................. . (12)4.1小车角度的计算.................. .. (12)4.2 小车平衡角度的分析 (12)4.3 小车从停车5s后到达B点的分析 (13)5.系统功能测试: (13)5.1测试方案 (13)5.2测试仪器及设备 (13)5.3测试结果 (13)5.4测试分析及结论 (14)6.结束语 (14)1.系统方案:系统总体设计框图如下图所示1.1 微控制器模块方案一:采用可编程逻辑期间CPLD作为控制器。
电动滑板车产品说明书详细介绍车辆的使用方法和注意事项安全骑行

电动滑板车产品说明书详细介绍车辆的使用方法和注意事项安全骑行电动滑板车产品说明书一、产品介绍本款电动滑板车是一种便携式、环保的交通工具。
它采用先进的电动技术,搭载高性能电池和马达,能够提供稳定而高效的动力。
本产品具备以下特点:1. 动力系统:采用环保的电动驱动系统,高效能马达提供稳定的动力,无需使用化石燃料,降低对环境的污染。
2. 超长续航:高容量锂电池,提供长久的续航能力。
在一次充电后,您可以享受长达xx公里的持续使用。
3. 轻便携带:本款电动滑板车采用轻量化设计,重量仅为xx公斤。
折叠式车身设计,方便携带和存储。
4. 智能控制:内置智能控制系统,支持多种操作模式、速度调节和刹车控制,提供更安全的驾驶体验。
二、使用方法1. 开启电源:按下电源开关,确保电量足够开始骑行。
2. 起步和加速:将一只脚放在滑板车上,另一只脚用力推动在地面上滑行,保持平衡。
然后按住加速按钮,驱动电机为您提供动力。
3. 刹车:滑板车配备了刹车系统,您可以使用刹车按钮减慢速度或停止车辆。
刹车时,请保持平衡,防止意外摔倒。
4. 方向控制:通过调整身体重心和转动滑板车手柄来控制滑板车的转向。
请注意平稳转弯,以确保驾驶的安全。
5. 行驶速度调节:本款滑板车支持多档速度调节,您可以根据需要选择合适的速度模式。
使用前请熟悉不同模式的速度范围。
三、注意事项为了您的安全和滑板车的正常使用,请遵循以下注意事项:1. 选择合适的骑行路线:选择平坦、宽敞、光滑的路面进行骑行,避免崎岖不平的地形、水坑或泥泞的区域。
2. 佩戴安全装备:在骑行过程中,务必佩戴头盔和其他适当的安全装备,以保护自己免受意外伤害。
3. 注意交通安全:滑板车在道路上行驶时需遵守交通规则,注意道路标志和交通信号灯。
预留足够的制动距离,确保安全停车。
4. 防止溅水:本款滑板车并非防水设计,请避免在雨天或水洼区域使用,以防止损坏电路和电池。
5. 定期保养:请按照说明书的要求进行定期保养,包括检查电池充电情况、轮胎磨损、刹车系统和驱动系统的工作状态等。
跷跷板设计

电动车跷跷板(F题)【本科组】一、任务设计并制作一个电动车跷跷板,在跷跷板起始端A一侧装有可移动的配重。
配重的位置可以在从始端开始的200mm~600mm范围内调整,调整步长不大于50mm;配重可拆卸。
电动车从起始端A出发,可以自动在跷跷板上行驶。
电动车跷跷板起始状态和平衡状态示意图分别如图1和图2所示。
二、要求1.基本要求在不加配重的情况下,电动车完成以下运动:(1)电动车从起始端A出发,在30秒钟内行驶到中心点C附近;(2)60秒钟之内,电动车在中心点C附近使跷跷板处于平衡状态,保持平衡5秒钟,并给出明显的平衡指示;(3)电动车从(2)中的平衡点出发,30秒钟内行驶到跷跷板末端B处(车头距跷跷板末端B不大于50mm);(4)电动车在B点停止5秒后,1分钟内倒退回起始端A,完成整个行程;(5)在整个行驶过程中,电动车始终在跷跷板上,并分阶段实时显示电动车行驶所用的时间。
2.发挥部分将配重固定在可调整范围内任一指定位置,电动车完成以下运动:(1)将电动车放置在地面距离跷跷板起始端A点 300mm以外、90°扇形区域内某一指定位置(车头朝向跷跷板),电动车能够自动驶上跷跷板,如图3所示:(2)电动车在跷跷板上取得平衡,给出明显的平衡指示,保持平衡5秒钟以上;(3)将另一块质量为电动车质量10%~20%的块状配重放置在A至C间指定的位置,电动车能够重新取得平衡,给出明显的平衡指示,保持平衡5秒钟以上;(4)电动车在3分钟之内完成(1)~(3)全过程。
(5)其他。
三、说明(1)跷跷板长1600mm、宽300mm,为便于携带也可将跷跷板制成折叠形式。
(2)跷跷板中心固定在直径不大于50mm的半圆轴上,轴两端支撑在支架上,并保证与支架圆滑接触,能灵活转动。
(3)测试中,使用参赛队自制的跷跷板装置。
(4)允许在跷跷板和地面上采取引导措施,但不得影响跷跷板面和地面平整。
(5)电动车(含加在车体上的其它装置)外形尺寸规定为:长≤300mm,宽≤200mm。
美国自行车公司 Trek 高效度踏板电动踏板说明书

TP-15141Revised 09-17Inspecting and Tightening CarrierMounting BoltsCertain Trailers Equipped with Air DiscBrakesHazard Alert MessagesRead and observe all Warning and Caution hazard alert messages inthis publication. They provide information that can help preventserious personal injury, damage to components, or both.WARNINGTo prevent serious eye injury, always wear safe eye protectionwhen you perform vehicle maintenance or service.Park the vehicle on a level surface. Block the wheels toprevent the vehicle from moving. Support the vehicle withsafety stands. Do not work under a vehicle supported only byjacks. Jacks can slip and fall over. Serious personal injury anddamage to components can result.ASBESTOS AND NON-ASBESTOSFIBERS WARNINGSome brake linings contain asbestos fibers, a cancer and lungdisease hazard. Some brake linings contain non-asbestosfibers, whose long-term effects to health are unknown. Youmust use caution when you handle both asbestos andnon-asbestos materials.How to Obtain Additional Maintenance,Service and Product InformationRefer to Maintenance Manual MM-0467, EX+™ Air Disc Brake. Toaccess this publication, visit Literature on Demand at .How to Obtain KitsCall Meritor’s Commercial Vehicle Aftermarket at 888-725-9355.Table A: Replacement PartsInspecting and Tightening CarrierMounting BoltsThis technical bulletin provides instructions for inspecting the carriermounting bolts and tightening the bolts to the correct torquespecification. This inspection only applies to certain axles on alimited number of trailers.Caliper Model IdentificationMeritor EX+ CalipersTo identify Meritor EX+ calipers, remove the protective cap from theadjuster screw and look for the part number engraved in the metalplate (EX225...). Figure1.Brake Model Kit Number Includes Qty.EX225L257CD000andEX225L258CD000KIT22522541X1862 (50mmM20 x 2.0-6g Grade10.9)6MWA 520P6EX225L202CD000andEX225L201CD000KIT22522641X1484V (60mmM20 x 1.5-6g Grade10.9)6MWA 520P6Non-Meritor KIT225261MS220050AM 2(50mm M20 x2.5-6g Grade 10.9)6MWA 520K6Brake Model Kit Number Includes Qty.TP-15141Revised 09-17(16579)Page 2Copyright Meritor, Inc., 2017Printed in USANon-Meritor CaliperTo identify non-Meritor calipers, refer to the appropriate manufacturer’s service manual for the ID tag location.Inspection Procedure1.Wear safe eye protection. Park the trailer on a level surface.2.Raise the trailer by the ICC bar so that the axles drop down allowing access to the caliper mounting bolts. Support the trailer with jack stands.3.Locate the carrier mounting bolts and check if any of the bolts are missing. Figure 2, Figure 3, Figure 4 and Figure 5.Figure 2Figure 3Figure 4Figure 5țIf no bolts are loose (hand tight) or missing: Proceed to Step 4.țIf one (1) bolt is loose (hand tight) or missing: Use the appropriate kit to replace all of the mounting bolts with new bolts and washers. Proceed to Step 4.țIf more than one (1) bolt is loose (hand tight) or missing: Proceed to the “Caliper and Torque Plate Inspection” procedure in this publication.4.Use an appropriate-length torque wrench to tighten the carrier mounting bolts at all wheel end positions on the trailer.40123CARRIER MOUNTING HOLESMERITOR EX+ – 6-BOLT STYLECARRIER MOUNTING HOLESMERITOR EX+ – 4-BOLT STYLE4013598aCALIPER MOUNTING HOLESBENDIX4013599aCALIPER MOUNTING HOLESWABCO PAN-22TP-15141(16579)Revised 09-17Printed in USACopyright Meritor, Inc., 2017Page 3țFor Meritor EX+ air disc brakes: Use a 30mm-size socket to tighten the carrier mounting bolts to 400 lb-ft (542N Ⴇm). Use the special torque adapter, part number 3256B1354, where needed for access to the mounting bolts. When using the special torque adapter, use the settings shown in Table B for torque compensation. Figure 6. @țFor Bendix brakes: Tighten the carrier mounting bolts to 350-400 lb-ft (475-542N Ⴇm). @țFor WABCO PAN-22 brakes: Tighten the carrier mounting bolts to 270-310 lb-ft (366-420N Ⴇm). @e a white or yellow paint pen to mark the head of each bolt indicating that Step 4 has been completed.6.When all of the caliper bolts at each wheel end have been inspected, remove the jack stands and lower the trailer.Caliper and Torque Plate Inspection1.Raise the axle being serviced and support it with jack stands.2.Remove the wheels.3.Back off the caliper adjuster.țFor EX+ calipers: Refer to Maintenance Manual MM-0467 for instructions.țFor non-Meritor calipers: Refer to the appropriate manufacturer’s service manual for instructions.4.Remove the caliper.țFor EX+ calipers: Refer to Maintenance Manual MM-0467 for instructions.țFor non-Meritor calipers: Refer to the appropriate manufacturer’s service manual for instructions.5.Inspect the caliper and torque plate for damage.țIf damage is found: Inspect the rotor, caliper and pads. Take clear photos of damage on all components forsubmitting to the Meritor OnTrac™ Customer Call Center. Replace damaged components.țIf no damage is found: Proceed to the next e the appropriate kit to replace all of the mounting bolts with new bolts and washers.7.Install the caliper.țFor EX+ calipers: Refer to Maintenance Manual MM-0467 for instructions.țFor non-Meritor calipers: Refer to the appropriate manufacturer’s service manual for instructions.8.Use an appropriate-length torque wrench to tighten the carrier mounting bolts at all wheel end positions on the trailer.țFor Meritor EX+ air disc brakes: Use a 30mm-size socket to tighten the carrier mounting bolts to 400 lb-ft (542N Ⴇm). Use the special torque adapter, part number 3256B1354, where needed for access to the mounting bolts. When using the special torque adapter, use the settings shown in Table B for torque compensation. @țFor Bendix brakes: Tighten the carrier mounting bolts to 350-400 lb-ft (475-542N Ⴇm). @țFor WABCO PAN-22 brakes: Tighten the carrier mounting bolts to 270-310 lb-ft (366-420N Ⴇm). @9.Use a white or yellow paint pen to mark the head of each bolt indicating that Step 8 has been completed.10.Readjust the pad-to-rotor clearance.țFor EX+ calipers: Refer to Maintenance Manual MM-0467 for instructions.țFor non-Meritor calipers: Refer to the appropriate manufacturer’s service manual for instructions.11.Install the wheels per OEM guidelines.12.Remove the jack stands and lower the axle.Labor TimeStandard Repair Time (SRT)ț0.25 hours – Administrative (per trailer regardless of number of axles)ț0.75 hours – Inspection and torque (per axle)ț1.25 hours – Remove and, if applicable, replace caliper ț1.25 hours – Replace rotor (including removing hub and replacing wheel seal)ț0.5 hours – Replace torque plateExample: To inspect a sliding tandem axle set, the SRT would be 1.75 hours (0.25 + 0.75 + 0.75)To File a ClaimFor questions or when the repair has been completed, contact the Meritor OnTrac™ Customer Call Center by phone at 1-866-OnTrac1 (668-7221)******************************.Information contained in this publication was in effect at the time the publication was approved for printing and is subject to change without notice or liability. Meritor Heavy Vehicle Systems, LLC, reserves the right to revise the information presented or to discontinue the production of parts described at any time.Copyright 2017TP-15141Meritor, Inc.Revised 09-17All Rights ReservedPrinted in USA(16579)Meritor Heavy Vehicle Systems, LLC 2135 West Maple Road Troy, MI 48084 USA866-OnTrac1 (668-7221)Reference Campaign Program C17AB.Table B: Torque Compensation with Meritor Extension Tool 3256B135********a。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电动车跷跷板设计并制作一个电动车跷跷板,在跷跷板起始端A一侧装有可移动的配重。
配重的位置可以在从始端开始的200mm~600mm范围内调整,调整步长不大于50mm;配重可拆卸。
电动车从起始端A出发,可以自动在跷跷板上行驶。
在不加配重的情况下,电动车完成以下动作:(1)电动车从起始端A出发,在30秒钟内行驶到中心点C附近。
(2)60秒钟之内,电动车在中心点C附近使跷跷板处于平衡状态,保持平衡5秒钟,给出明显的平衡指示。
(3)电动车从(2)中的平衡点出发,30秒钟内行驶到跷跷板末端B处(车头距跷跷板末端B不大于50mm)。
(4)电动车在B点停止5秒后,1分钟内倒退回起始端A,完成整个行程。
(5)在整个行驶过程中,电动车始终在跷跷板上,并分阶段实时显示电动车行驶所用的时间。
图10.9.1 起始状态示意图图10.9.2 平衡状态示意图【项目知识点和技能点】1、步进电机的应用和控制。
2、自动寻迹系统原理与应用。
3、角度传感器的原理和应用。
4、PTR8000无线发送与接收模块的应用。
5、AT89s52单片机模数转换的原理和应用。
8.2.2 总体设计方案以单片机AT89S52为主要控制芯片,查询按键的输入,传输各种参数的显示,两台电机的正反转和速度控制以及两台电机的协调运动,负责光电检测信号的接收和对信号的处理,从而能够确定小车轨迹,在B点停止和返回,并最终停止。
角度传感器把角度信号输给单片机,把检测到的角度和基准角度比较,从而确定翘翘板的平衡点。
寻找平衡点时主要是采用PID闭环控制算法,在小车行驶过程中每当小车翻过平衡点的时候都令小车向后退一段路程,直到小车再次翻过平衡点,小车再次向前行驶一段比前一段要小的距离直到翻过平衡点,最终找到平衡点。
系统框图如8-13所示,由如下几个模块组成控制模块——采用AT89S52单片机控制。
电机选择模块——采用四线两相步进电机。
显示模块——采用1602LCD液晶显示屏进行显示。
光电检测模块——采用反射式光电传感器检测跷跷板上黑线。
电机驱动模块——采用步进电机驱动电路。
角度检测模块——采用角度传感器检测。
【项目准备】1、项目原理本系统共可分为两部分:跷跷板平衡检测系统,以AT89s52单片机为控制核心,将角度传感器连接在跷跷板中心的转动轴上以检测跷跷板摆动角度,,并通过无线通讯模块将数据发送给电动车系统。
电动车系统也以AT89s52为控制核心,以两个步进电机分别与左右车轮同轴相连来作为电动车的动力装置,采用光电传感器检测引导线,利用无线通讯模块接收跷跷板平衡检测系统发送的数据,单片机对数据进行智能分析,调整小车前进速度和方向,使跷跷板达到平衡状态。
在电动车到达指定位置时,给出声光提示,同时液晶显示屏显示时间和小车当前状态。
其原理图如图10.9.3所示:图10.9.3 电动车跷跷板系统原理图2、电动车驱动部分的原理与制作如实物图10.9.4所示,在电动车左右两轮上分别配置两个步进电机来作为电动车的动力装置,通过控制两个步进电机的转动方向来控制电动车的前进和后退,通过控制两个步进电机的转速的快慢来控制电动车的转向。
电机和车轮之间通过齿轮啮合来传动。
在实际制作中,可根据实际情况来选用齿轮来改变它们之间的传动比,以使电动车能获得适当的速度范围。
3、电动车循迹的原理如实物图10.9.4所示,在电动车的前侧安装两个光电传感器,利用光在不同颜色的物体表面具有不同的反射性质的特点,来判断电动车的行走位置,一般情况下,光电传感器发射的光会被路面反射回来,但如果遇到黑色物体则会被吸收,传感器将接收不到反射光线。
单片机就是否收到反射回来的光线为依据来判断黑色引导线的位置和小车的行走路线。
图10.9.4 电动车系统实物图图10.9.5 电动车的循迹原理图如图10.9.5所示,当光电传感器没有检测到黑线时,其输出为0。
电动车前进,使用光电传感器1和2,当光电传感器1检测到黑线时,说明电动车向右方偏移,则电动车左轮向后转,右轮向前转,调整小车前进角度,使小车始终保持在黑线上行走。
同理,电动车后退,使用光电传感器3和4进行检测。
电动小车在行走的过程中,将接收来自跷跷板检测系统的数据,并根据接收到的数据来决定小车的前进和后退以及行进的快慢。
4、步进电机及其驱动模块1)步进电机的简单介绍步进电机是纯粹的数字控制电机,它将电脉冲信号转变成角位移,即给一个脉冲信号,步进电机电动机就转动一个角度,实质上是一种数字/角度转换器,由于输入的是脉冲信号,输出的角位移是断续的,所以又称为脉冲电动机。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)3种,永磁式一般为两相,转矩和体积较小,步进角一般为7.5或15;反应式一般为三相,可实现大转矩输出,步进角一般为1.5,但噪声和振动都很大,混合式应用最为广泛,它混合了永磁式和反应式的优点。
步进电机系统中有2个重要电路:脉冲分配电路和驱动电路。
脉冲分配电路有2个输入信号:步进脉冲和转向控制。
脉冲分配电路在步进脉冲和转向控制信号的共同作用下产生正确转向的激励信号。
此激励信号经过驱动电路送至步进电机,从而控制步进电机向正确的方向转动,此激励信号的频率决定了步进电机的转速。
脉冲分配可通过脉冲分配器实现,也可通过软件实现。
驱动电路的主要作用是实现功率放大,一般脉冲分配器输出的驱动能力是有限的,它不可能直接驱动步进电机,因此需要经过一级功率放大。
2)SMD-401 步进电机驱动模块说明(1)特性①本驱动模块适用于四相混合式和永磁式步进电机②采用单极恒压驱动原理,驱动电流可达1A。
③四相八拍励磁方式,步进电机半步运行(即步进角为1.8度的步进电机,每个脉冲电机转动0.9度)④厚膜电路封装,体积小,具有高度抗干扰性。
(2)使用及说明驱动器连接示意图图10.9.6 SMD-401驱动模块连接示意图(3)管脚说明:VCC:5V系统工作电源,要求稳压,驱动电流应大于200毫安。
CP:步进脉冲信号输入端,上升沿有效。
DIR:方向控制端。
此信号决定电机旋转方向,比如:信号高电平时,电机顺时针旋转;信号低电平时,逆时针旋转。
电机换相时一定要在电机降速后再换相,换相信号一定要在前一个方向的最后一个CP脉冲结束后以及下一个方向的第一个CP 脉冲前发生。
如图10.9.7所示。
图10.9.7 方向控制脉冲的输入方式FREE:此信号用户可选择接或不接,高电平有效时,电机处于无力矩状态,低电平或不接时,此管脚无效。
HOTO:低压锁定控制端,低电平有效时,当电机处于锁定状态时,电机驱动电压由(VH)切换至(VCC),降低电机的锁定电压,减小发热,高电平或不接时,此管脚无效。
VH:电机驱动电源DC(5—24V),要求稳压,根据不同电机选择驱动电压大小。
GND:电机驱动电源,系统驱动电源,控制信号公共接地线,控制信号与驱动没有隔离。
O:电机绕组公共端。
A:电机绕组A接线端。
B:电机绕组B接线端。
C:电机绕组C接线端。
D:电机绕组D接线端。
(4)注意事项①控制信号与驱动系统电源没有隔离。
②本驱动采用恒压原理驱动,必须稳压。
仅适配电机绕组阻值较大,相电流小于1A的小功率混合式或永磁式步进电机。
3. 显示器接口电路本系统采用LCD1602(16*2)作为主要显示器件。
程序开始时,先对液晶显示器初始化,小车在运行过程中,液晶显示器可以实时显示运行的时间和运行状态。
开机时显示设计题目的主题,对用户操作进行提示。
LCD模块采用并行输入,P0口是数据输入接口,EN、R/W和RS分别与P2.0、P2.1、P2.2连接。
电路如图8-16所示【硬件电路图】图10.9.8中是电动车系统中光电传感器寻迹模块、声光报警模块以及按键选择部分的电路原理图,图中的S1、S2、S3和S4为四个光电传感器,left LED 和right LED 是电动车的转向灯,并和BELL 一起构成了电动车的声光报警电路,JP_CHK2按键是选择按键,用以选择电动车执行的任务,JP_CHK 按键是确认按键,用以确认电动车是否执行所选择的任务。
图中省略了PTR8000通信模块部分的电路图,详见第九章PTR8000无线通信模块部分。
图10.9.8 电动车系统部分部分电路原理图VSS 1VDD 2VL 3RS 4R/W 5EN 6D07D18D29D310D411D512D613D714BL-15BL+161602LCD1602LCD R51.8K P20P21P22P00P01P02P03P04P05P06P07VCC+5V图10.9.9给出的是电动车动力驱动部分的电路原理图,图中M1和M2是两个步进电机,分别与为电动车驱动轮的左右两轮相连,图中SMD401是步进电机的驱动模块,该模块的工作电压为+5V,驱动电压为+8V,图中C0、C1、C2、C3四个电容用以滤波,增加驱动模块的抗干扰性能。
图10.9.9 电动车系统动力驱动部分电气原理图图10.9.10是跷跷板角度检测部分的电路原理图(PTR8000部分略),图中A0为角度传感器,单片机通过PA0采集跷跷板角度变化信号,并通过其自身的模数转换器功能将其转化为数字信号,并通过PTR8000无线通信模块发送给电动车系统。
图10.9.10 跷跷板角度检测部分电路原理图【软件设计】1、程序流程图1)如图10.9.11所示,为电动车系统程序流程图。
本程序以菜单显示为主线,画面显示小车在A、B、C的平衡状态,平衡状态时发出声光报警信号。
系统主程序流图如图8-21所示:开始(初始化)开机按键是否按下?小车是否与跷跷板平行?直行到C 点附近调节车身平衡小车是否平衡?停车5秒直行到跷跷板B 点是否到达B 点?停车5秒回退到A 点结束直行NNNNYY YY2) 如图10.9.12所示,为跷跷板角度检测系统程序流程图。
图10.9.12 跷跷板角度检测系统程序流程图8.2.5 系统功能测试将小车放在起始位置(A点),开启电源,让小车自由行驶。
记录从A点到C点附近的时间,在C点找平衡的时间,平衡后从C到B点的时间,以及从B点回到A点的时间。
如表8-1所示:表8-1 测试结果记录项目第一次第二次第三次第四次最大时间从A点到C点附近的时间(s)29 30 28 26 30在C点找平行的时间(s)45 53 60 57 60平衡后从C到B点的时间(s)30 22 27 29 30从B点回到A点的时间(s)60 55 56 58 608.2.6 总结本系统使用A T89S52单片机做主控制器,10 PU-M步进电机驱动、辅以光电传感器和角度传感器等测量器件,设计并实现了电动小车自动行驶上跷跷板,利用水平倾角自动判断寻找到翘翘板上的平衡点。
通过LED灯给出平衡指示,并在平衡点停留指定时间后行驶至跷跷板另外一端、停留指定时间后返回至起点的全过程,全程用LCD液晶实时显示工作状态及平衡时角度、行驶时间等参数。