四连杆曲柄飞剪机剪切力测试与分析
基于ADAMS的四连杆飞剪机剪切机构仿真分析

中图分类号 : T H1 2 2
文献标识码 : B
文章编 号: 1 6 7 2 — 5 4 5 X( 2 0 1 3) 0 5 — 0 0 6 1 — 0 3
( 3 ) 在 剪切 区 内 ,剪 刃水 平 分 速度 最 好 保 持 工, 以便对其进行后续处理 的设备。飞剪机的应用使 常 数 。 过高 , 将会 引起 “ 拉钢” ; V 过低 , 则 引起 “ 缠 轧钢 生 产 迅 速 向高 速 化 、 连 续 化方 向发 展 , 其性 能 的 刀 ” 事 故 。两者 都会 导致 轧件 切废 , 并 可 能损 坏剪 刃 。 优 劣 将 直 接影 响轧 制 生产 线 的生 产效 率 。对 飞剪 机 故设 计 时一 般取 =( 1—1 . 1 ) V 。 ; 基本结构 、 运动学 、 仿真优化以及有限元进行深人的 ( 4 ) 应 保 证 上 下 刀 刃有 足 够 的开 口度 和 足 够 的 研究 , 以 提 高飞 剪 机 的剪 切 性 能 , 对 飞剪 机 的整 机设 加速 角度 。若 开 口度 太小 , 有 可能 出现 不 剪切 时轧 件 计 具 有特别 重 要 的意 义 。 冲 击刀 刃 。加 速 角度 太 小 可 能会 出现进 入 剪 切 点 时 对 于 飞剪机 运 动学 的分析 , 常规 的分析 方 法是 图 解法 和解 析 法 。 但是 , 前者 的设 计精 度低 , 后 者 的计算 工作 量 大 , 必 须借 助 计 算机 编 程 处理 。但 是 , 通 过在 AD A MS下 的机 构仿真 ,可 以清楚 的看 到从 动件 的运
收 稿 日期 : 2 0 1 3 — 0 2 — 0 4 7
作者简介 : 梁永 江( 1 9 7 4 一) , 女, 广西)  ̄ p k ' r 1 人, 硕士 , 主要从 事机械设计及其 自动化方面 的科研和教学工作 。 61
四连杆机运动学分析报告
栏杆机四杆机构运动学分析1 四杆机构运动学分析1.1 机构运动分析的任务、目的和方法曲柄摇杆机构是平面连杆机构中最基本的由转动副组成的四杆机构,它可以用来实现转动和摆动之间运动形式的转换或传递动力。
对四杆机构进行运动分析的意义是:在机构尺寸参数已知的情况下,假定主动件(曲柄)做匀速转动,撇开力的作用,仅从运动几何关系上分析从动件(连杆、摇杆)的角位移、角速度、角加速度等运动参数的变化情况。
还可以根据机构闭环矢量方程计算从动件的位移偏差。
上述这些内容,无论是设计新的机械,还是为了了解现有机械的运动性能,都是十分必要的,而且它还是研究机械运动性能和动力性能提供必要的依据。
机构运动分析的方法很多,主要有图解法和解析法。
当需要简捷直观地了解机构的某个或某几个位置的运动特性时,采用图解法比较方便,而且精度也能满足实际问题的要求。
而当需要精确地知道或要了解机构在整个运动循环过程中的运动特性时,采用解析法并借助计算机,不仅可获得很高的计算精度及一系列位置的分析结果,并能绘制机构相应的运动线图,同时还可以把机构分析和机构综合问题联系起来,以便于机构的优化设计。
1.2 机构的工作原理在平面四杆机构中,其具有曲柄的条件为:a.各杆的长度应满足杆长条件,即:最短杆长度+最长杆长度≤其余两杆长度之和。
b.组成该周转副的两杆中必有一杆为最短杆,且其最短杆为连架杆或机架(当最短杆为连架杆时,四杆机构为曲柄摇杆机构;当最短杆为机架时,则为双曲柄机构)。
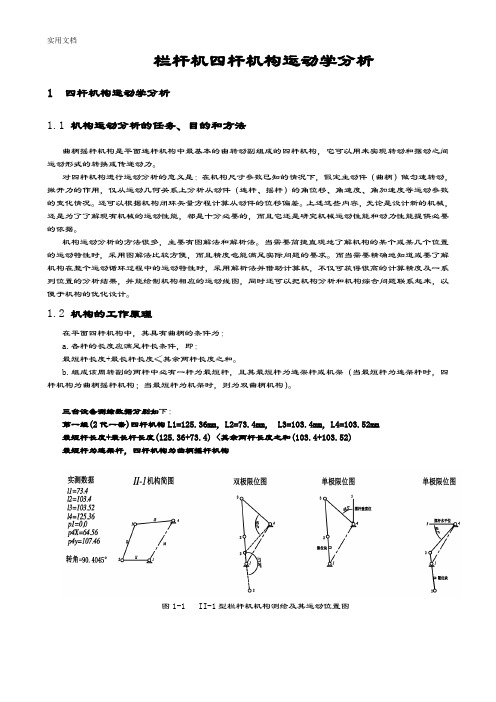
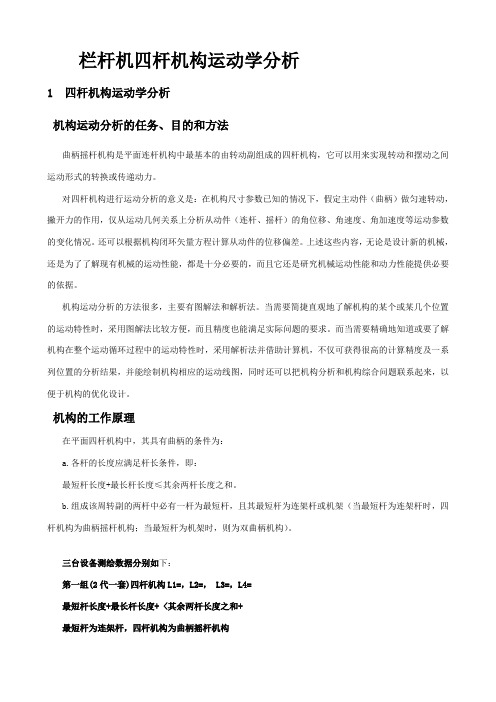
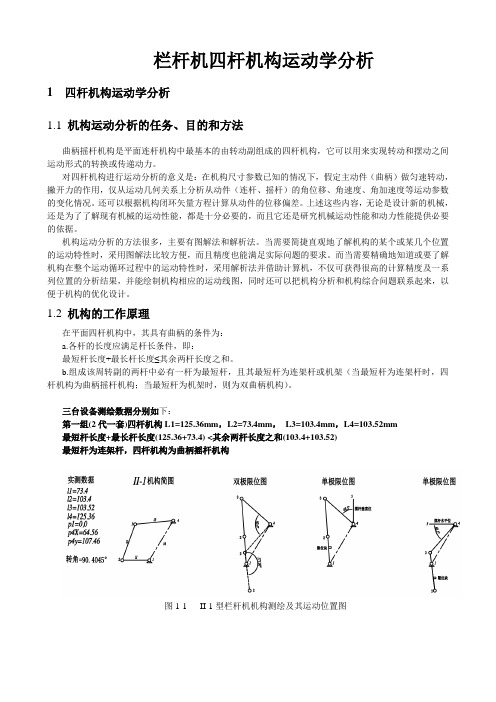
三台设备测绘数据分别如下:第一组(2代一套)四杆机构L1=125.36mm,L2=73.4mm, L3=103.4mm,L4=103.52mm最短杆长度+最长杆长度(125.36+73.4) <其余两杆长度之和(103.4+103.52)最短杆为连架杆,四杆机构为曲柄摇杆机构图1-1 II-1型栏杆机机构测绘及其运动位置图第二组(2代二套)四杆机构L1=125.36mm,L2=50.1mm,L3=109.8mm,L4=72.85mm最短杆长度+最长杆长度(125.36+50.1) <其余两杆长度之和(109.8+72.85)最短杆为连架杆,四杆机构为曲柄摇杆机构图1-2 II-2型栏杆机机构测绘及其运动位置图第三组(3代)四杆机构L1=163.2mm,L2=64.25mm,L3=150mm,L4=90.1mm最短杆长度+最长杆长度(163.2+64.25) <其余两杆长度之和(150+90.1)最短杆为连架杆,四杆机构为曲柄摇杆机构图1-3 III型栏杆机机构测绘及其运动位置图在如下图1所示的曲柄摇杆机构中,构件AB为曲柄,则B点应能通过曲柄与连杆两次共线的位置。
起停式曲柄飞剪剪切力能参数计算及仿真分析

起动时间内达到剪切所需的速度,从电机起动到剪
切终了,曲柄转过的角度之和&必须满足允许起动
转角口7(式10),而且电机实际起动时间£’应小于电
机加速时间f。剪切时不允许剪刃速度下降幅度太
大,以防止剪刃速度滞后于轧件速度。
∑a≤口’
(10)
仁丽‰ 电机起动时间的计算式为:
(…117)
。38.2(Me,一Mk)
剪切材质为20号钢的庐48 mm圆钢。轧件运 动速度为7.535 3 m/s,剪切温度为760℃时,单位 剪切阻力r一88 MPa。飞剪机曲柄转速变化的规律 及所对应的曲柄转角见表1。表中所列在一个剪切 周期内曲柄转过的各相见图3。利用笔者建立的力 能参数计算模型计算出的结果见表2。 3.3仿真结果分析
with 0n—off switch
允许转角要求。取这样的速度降和飞轮,所释放的 动能为7.559 kNm,满足了剪切功7.238 kNm的需 要,能够剪切温度为760℃、直径为声48 mm的圆钢。 电机起动所需时间为o.618 1 s,小于O.62 s,也在允 许范围内。电机型号为DMA3315,电机起动所需力 矩7.559 kNm,起动所需功率273.12 kW,均小于电 机额定力矩7.582 kNm和额定功率280 kW,表明 电机带飞轮空载起动没有问题。
规格采用3种剪切方式:①不带飞轮、不用连杆的滚 筒回转式;②不带飞轮的曲柄回转式;③带飞轮的曲 柄回转式(以下简称曲柄飞剪)。飞轮5的连接由横 移内齿圈3(见图2)来实现。
2 剪切力能参数的计算模型
2.1 剪切角
剪切角乒,即开始剪切时曲柄与垂直线的夹角, 可由下式计算:
c洲一f孚一z髓一c)/R
(1)
相对于相邻两次剪切时间,VMC40N飞剪机每 次剪切时间很短,工作制度为起停式,即飞剪机一般 处于静止状态。剪切时,采用低惯量、大扭矩直流电
飞剪机减速器及四连杆执行机构设计说明书
机械设计课程设计计算说明书设计题目飞剪机传动装置设计能源与动力工程学院(系) 390414 班设计者 39041423 张龙指导教师杨洋2012 年 5 月 9 日北京航空航天大学设计任务书1.设计题目:飞剪机传动装置设计2.设计要求1).飞剪机用于轧件的剪切,在轧件运动方向上剪刃的速度应等于或略大于轧件运动速度。
2).为保证轧件剪切断面质量,要求飞剪机的一对剪切刀片在剪切过程中做平移运动。
3).剪刃的运动轨迹应是一条封闭曲线,且在剪切段应尽量平直,剪切过程中要求剪切速度均匀。
4)单向运动,频繁起动,使用期限为十年,专业机械厂制造,小批量生产,两班制工作。
3.原始技术数据4.设计任务(1)选择电动机。
(2)设计工作机构和减速器。
(3)选择联轴器。
(4)绘制减速器转配图1张,零件工作图2张。
(5)编写设计说明书1分。
目录一、飞剪机总体方案设计 (3)1.飞剪机总体布局 (3)2.执行机构设计 (3)3.电机的选择 (4)4.传动比的分配 (4)5.运动和动力参数计算 (5)二、传动零件设计 (6)1.高速级齿轮传动设计 (6)2.低速级齿轮传动设计 (9)3.四连杆机构设计 (12)三、轴的设计 (13)1.高速轴的设计与校核 (13)2.中间轴的设计与校核 (15)3.低速轴的设计与校核 (17)四、轴承的选择与校核 (21)1.高速轴轴承的选择与校核 (21)2.中间轴轴承的选择与校核 (22)3.低速轴轴承的选择与校核 (23)五、键的选择与校核 (25)六、减速器箱体及附件的设计 (27)1.减速器机体各部分结构尺寸 (27)2.润滑和密封形式的选择 (29)七、其他设计说明 (30)八、参考文献 (31)九、附录 (32)1)四连杆执行机构尺寸示意图 (32)2)四连杆运动特性参数表格 (33)3)刀刃轨迹 (34)4)刀刃速度 (35)5)刀刃角度 (36)一、飞剪机总体方案设计1.飞剪机总体布局如图,由电动机输出扭矩,用弹性联轴器连接电动机输出轴与三级减速器的输入端。
曲柄式飞剪剪刃间隙变化问题分析与管控
曲柄式飞剪剪刃间隙变化问题分析与管控赵春光;于洪喜;李文晖;高伟;马夫明;范建鑫【摘要】飞剪是热连轧线的重要设备,飞剪剪刃间隙变化直接影响剪切状态,导致剪切不断的故障发生.通过对飞剪动作原理和结构分析,通过现场数据测量和结果分析,找到引起剪刃横线窜动和间隙变化的主要原因,并对刀座的变形进行解决,飞剪设备精度得到有效保证.【期刊名称】《冶金动力》【年(卷),期】2016(000)0z1【总页数】4页(P16-19)【关键词】飞剪;剪刃;间隙变化;窜动;变形【作者】赵春光;于洪喜;李文晖;高伟;马夫明;范建鑫【作者单位】北京首钢股份有限公司热轧作业部,河北迁安 064400;北京首钢股份有限公司热轧作业部,河北迁安 064400;北京首钢股份有限公司热轧作业部,河北迁安 064400;北京首钢股份有限公司热轧作业部,河北迁安 064400;北京首钢股份有限公司热轧作业部,河北迁安 064400;北京首钢股份有限公司热轧作业部,河北迁安064400【正文语种】中文1.1 曲柄式飞剪的功能特点飞剪用于将运行中的钢坯切去头部和尾部,以便钢坯顺利进入精轧机,并且可以提高成品的头、尾质量。
曲柄式飞剪位于精轧除鳞机前,它是由传动装置、机架本体、剪切机构、剪刃间隙调整装置、剪刃更换装置等部件组成。
迁钢2160曲柄式飞剪的剪切机构属于四连杆结构,能够保证剪切过程中,上下剪刃接近做平行运动,同时在剪切区剪切基本上是垂直轧件,剪切端面的质量较好。
但是这种机构的剪股和摆杆做摆动,动负荷冲击大。
1.2 曲柄式飞剪的工作循环在一个工作循环中,剪刃的几个典型位置对应的曲柄转角如图1所示。
表1是剪刃位于各主要剪切位置时曲柄相应的转角。
SB位,飞剪剪切极限厚度(65 mm)板坯时剪刃开始切入的起始角。
SM位,剪刃全部切入板坯,剪切力最大。
SE位,刚好切断板坯的位置。
T位,死点、换刀及上下剪刃重合度最大的位置(剪刃中部10 mm,边部65 mm)。
飞剪的剪切性能分析及优化

是通过弹簧锁紧缸拉紧楔块从剪刃侧面楔紧剪刃, 当剪刃需要
卸时只需向缸内通人压力油压缩弹簧松开斜楔 , 即可将 旧剪 刃 轻松拆 出, 新剪刃顺利装入 , 这样实现 了在线换剪刃。
图2 所示。
四、 转鼓式பைடு நூலகம்飞剪剪刃的力能参数分析
飞剪 的特点是能横 向剪切运动着的轧件 , 它有两个基本要
作者简介 : 小干( 95 )男, 何 17 一 , 江西南康人 , 江西水 电检修
研究 方向: 电厂计 算机监控 水 程序 (K )负责机组无 功功率 调节 ;1) Q Z: (o机组 负荷控制 子程 安装 工程有 限公 司助理 工程 师 ,
、
概述
转鼓式 飞剪是新钢热连轧线精轧机组的关键设 备 , 在连续 生产不停机 的情况下用 于切去 中间坯的头部和尾部 , 以利于精
使上转鼓做轴 向移动 , 因同步齿轮是斜齿 , 可引起上 转鼓对下 转鼓的相对转动 , 进而引起剪刃间隙的变化。
三、 转鼓式飞剪在剪切 区运动 过程分 析
经过优化 的转鼓式 飞剪 , 在剪切过程 的位能参数 , 通过 自 轧机组的顺利咬入 , 最后到卷取机组卷成成品钢卷 。转鼓式切 头飞剪由上下转鼓 、 同步齿轮 、 机架、 底座 、 剪刃侧 隙调整机构 、 动控制(2 ) L级 进行保证 , 它具有如下特殊的位能参数 : 1 .当飞剪得到切头的指令后, 首先将切头剪刃转到20 , 2 ̄ 剪刃锁紧缸 、 主联轴器 、 主电机联轴 器、 主减速机和制动器等部 该位置 就是剪刃的起 动位置 ,当飞剪得到切头起动的指令后 , 切头剪 刃即从2 O 2。位置起动加速 ,在1.。开始进入剪切 , 6 8 至 转鼓式飞剪的结构 , 经过合理化创 新 , 得飞剪 的剪 切性 使 。剪切完成 , 2。位置开始制动 , 10 在一O 在 3。位置制动结束 , 能大幅度提高, 并且 , 这种创新结构与剪切运动的力能参数合 0 理的结合在一起 , 保证剪切运 动中的剪切力均衡。 然后再返 回到20 7。等待位置 , 等待下一个切头指令 , 再重复以
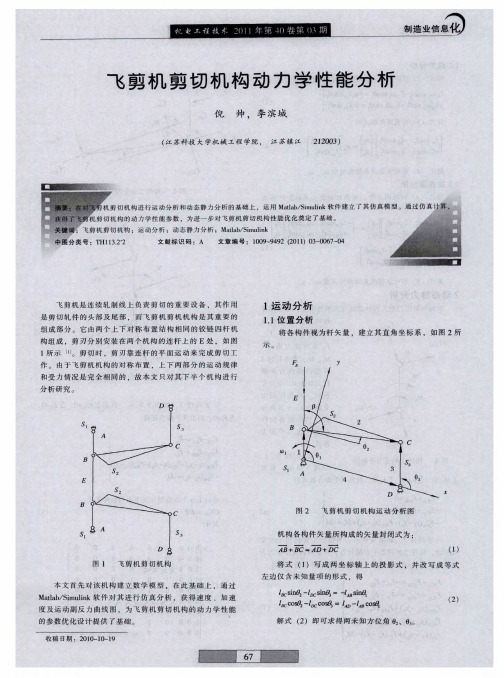
飞剪机剪切机构动力学性能分析
O
0
O 0
O
0 0 O l
0
O 0 O 0
O
O 0 0 0
根 据 ZM ̄ O EF = 、∑F = ,列 出其 平 衡 方 程得 = 、: x O yO
1 + + h = — = ・ — 一
O 1
l O
业信 息化
12速 度 分 析 .
将 式 ( ) 对 时 间求 一 次 导 数 ,可 得 速度 关 系式 为 2
一2+ 。^ } l l \ & c e D B ∞ ∞
sn0 i 2
鸸
鸥
s a o sn  ̄ i 3 n ) i 1 l O
、 ㈤
将 式 ( )写 成 矩 阵 形 式 为 3
+
- — )
-o y)
∑慨 .0 ∑ : 、 O ∑ 、 0 ,列 出 其 平衡 方 程 式 得
、
一 一
分 ・ = ) —
=
O
l
将 以 上 9个 方 程 简 化 为 下 面 的 矩 阵形 式
一
一
=
o
一 + = ・
}
( 6 )
+ q
掰q ]
( 5 )
解 式 ( ) 即可 求 得 两 未 知 角 加 速 度 O 、0 。 5 t l
2动 态 静 力 分 析
根 据 所 确 定 的相 关 构 件 加 速 度 及 角 加 速 度 , 可求 得 各 构 件 所 受 的 的 惯 性
一
l 2
力 各 构 件 的 、
CFR = DF
( 9
一
ห้องสมุดไป่ตู้
一
) 一
四连杆机运动学分析
栏杆机四杆机构运动学分析1 四杆机构运动学分析机构运动分析的任务、目的和方法曲柄摇杆机构是平面连杆机构中最基本的由转动副组成的四杆机构,它可以用来实现转动和摆动之间运动形式的转换或传递动力。
对四杆机构进行运动分析的意义是:在机构尺寸参数已知的情况下,假定主动件(曲柄)做匀速转动,撇开力的作用,仅从运动几何关系上分析从动件(连杆、摇杆)的角位移、角速度、角加速度等运动参数的变化情况。
还可以根据机构闭环矢量方程计算从动件的位移偏差。
上述这些内容,无论是设计新的机械,还是为了了解现有机械的运动性能,都是十分必要的,而且它还是研究机械运动性能和动力性能提供必要的依据。
机构运动分析的方法很多,主要有图解法和解析法。
当需要简捷直观地了解机构的某个或某几个位置的运动特性时,采用图解法比较方便,而且精度也能满足实际问题的要求。
而当需要精确地知道或要了解机构在整个运动循环过程中的运动特性时,采用解析法并借助计算机,不仅可获得很高的计算精度及一系列位置的分析结果,并能绘制机构相应的运动线图,同时还可以把机构分析和机构综合问题联系起来,以便于机构的优化设计。
机构的工作原理在平面四杆机构中,其具有曲柄的条件为:a.各杆的长度应满足杆长条件,即:最短杆长度+最长杆长度≤其余两杆长度之和。
b.组成该周转副的两杆中必有一杆为最短杆,且其最短杆为连架杆或机架(当最短杆为连架杆时,四杆机构为曲柄摇杆机构;当最短杆为机架时,则为双曲柄机构)。
三台设备测绘数据分别如下:第一组(2代一套)四杆机构L1=,L2=, L3=,L4=最短杆长度+最长杆长度+ <其余两杆长度之和+最短杆为连架杆,四杆机构为曲柄摇杆机构图1-1 II-1型栏杆机机构测绘及其运动位置图第二组(2代二套)四杆机构L1=,L2=,L3=,L4=最短杆长度+最长杆长度+ <其余两杆长度之和+最短杆为连架杆,四杆机构为曲柄摇杆机构图1-2 II-2型栏杆机机构测绘及其运动位置图第三组(3代)四杆机构L1=,L2=,L3=150mm,L4=最短杆长度+最长杆长度+ <其余两杆长度之和(150+最短杆为连架杆,四杆机构为曲柄摇杆机构图1-3 III型栏杆机机构测绘及其运动位置图在如下图1所示的曲柄摇杆机构中,构件AB为曲柄,则B点应能通过曲柄与连杆两次共线的位置。
飞剪机构设计说明书

=飞剪机构设计说明书一设计内容1.根据工艺要求制定机构方案,定性比较各方案的优劣;2.设计出满足工艺要求的机构尺寸及上、下剪刃的位置尺寸;3.根据最终设计结果按比例绘制机构运动简图及上、下剪刃的轨迹;4.进行机构的运动及力分析,检验上、下剪刃的速度相对误差、拉钢系数是否满足要求,并求出曲柄上的平衡力矩Mb。
二工作原理及要求如上图所示,摆式飞剪由四杆机构ABCD构成。
上剪刃E装在连杆BC上,下剪刃F装在摇杆CD上。
当曲柄AB等速转动时,将厚度为Db速度为Vt的运动中的钢材剪成定尺(长度)为L的成品。
飞剪机运动要求:1 曲柄转一圈对钢材剪切一次;2 剪切时,上、下剪刃速度相对误差小于其许用值:ΔV刀=|VEt-VFt|/(VEt+VFt)<=[ ε]=0.053 剪切时,上下剪刃应与钢材运动同步。
一般希望剪刃速度略大于钢材运动速度,即拉钢系数δ>1:V刀=(VEt+VFt)/2;δ= V刀/Vt=[ δ]=1.01~1.054 能调节钢材的剪切长度L三原始数据工艺参数剪切力F=10T=98kN;支座A距辊道面高约为h=250mm刀刃生命量Δh=5mm钢板厚度Δb=1mm机构设计参数按定尺L=1m给出机构的行程速比系数k、远极位传动角γ2、摇杆摆角ψ如下表所示。
四机构型综合机构型综合的方法及一般原则(1)固定一个构件为机架,可得到一个全铰链机构。
(2)可用移动副直接代替转动副而得到带有移动副的机构。
(3)具有两个转动副的一个构件可变换成一个高副。
(4)最简单机构原则。
首先采用最简单的运动链进行机构综合,不满足要求时才采用较复杂的运动链。
(5)最低级别机构原则。
采用多元连杆为机架一般不容易得到高级别机构。
(6)不出现无功能结构原则。
(7)最低成本原则。
加式易难及加工成本按如下顺序递增:转动副:移动副:高副。
(8)最符合工艺要求原则。
工艺对机构的动作要求:(1)为完成剪切,上下剪刃应完成相对分合运动;(2)为剪切运动中的钢材,上下剪刃在完成相对分合运动的同时还应有沿钢材方向的运动;(3)根据以上要求可知,上、下剪刃运动轨迹之一应为封闭曲线(如图a、b、c、d 所示)。
机械原理四连杆机构

播种机排种器
四连杆机构用于播种机排种器,通过调节连杆长度和角 度,实现排种量的精确控制。
工业机械中的应用
数控机床
四连杆机构用于数控机床的进给系统,实现高精度、 高效率的加工。
工业机器人
四连杆机构用于工业机器人的关节部位,实现机器人 的灵活运动和精确控制。
航空航天中的应用
飞机起落架
四连杆机构用于飞机起落架的收放系统,通过调节连 杆长度和角度,实现起落架的快速、稳定收放。
实验方法与步骤
1
3. 设定输入杆的长度和角度,启动实验,观察输 出杆的运动情况,记录相关数据。
2
4. 重复实验,改变输入杆的长度和角度,获取多 组数据。
3
5. 对实验数据进行整理和分析,得出结论。
实验结果与分析
实验结果
通过实验获取了四连杆机构在不同输入条件 下的运动数据,包括角度和速度的变化规律 。
机械原理四连杆机构
汇报人: 2023-12-27
目录
• 四连杆机构的概述 • 四连杆机构的工作原理 • 四连杆机构的类型与特点 • 四连杆机构的优化设计 • 四连杆机构的实验研究 • 四连杆机构的应用实例
01
四连杆机构的概述
定义与特点
定义
四连杆机构是一种由四个杆件相互连接组成的平面连杆机构,通过不同杆件的 相对运动实现特定的运动轨迹。
四连杆机构模型、测角仪、测速仪、数据采 集系统等。
实验方法与步骤
• 实验方法:采用控制变量法,通过改变输入杆的 长度和角度,观察输出杆的运动规律,并记录相 关数据。
实验方Байду номын сангаас与步骤
实验步骤 1. 搭建四连杆机构模型,确保各杆件安装正确,无卡滞现象。
曲柄式飞剪剪切控制的计算方法研究
曲柄式飞剪剪切控制的计算方法研究唐山钢铁集团有限责任公司河北省唐山市063000本文主要式介绍曲柄式飞剪在剪切过程曲柄轴角度对应飞剪动作时序,以及飞剪曲柄轴在剪切带钢头部和尾部时的加速度及剪切速度的计算方法,通过对剪切时序及速度的计算方法研究,解决产线存在剪切不准的问题,从而提高控制飞剪的剪切的精度。
在热轧生产线,一般飞剪安装在精轧除鳞机前,它是用来剪切移动中的钢坯的头部和尾部,并在出现事故时手动剪切。
飞剪分两种,一种是转鼓式,一种是曲柄式的,转鼓飞剪的角度计算和控制比较简单,曲柄式飞剪的角度计算相对比较复杂,本文主要是阐述曲柄式飞剪剪切带钢头部和尾部的计算及控制方法。
1、曲柄式飞剪剪切控制原理飞剪的剪切速度的设定值和剪切长度根据剪切优化系统和测量辊的信号来计算头部剪切测量速度主要是采集飞剪入口辊道或激光测速仪的速度,尾部剪切计算速度主要采集精轧除鳞机入口下夹送辊或出口上夹送辊的速度。
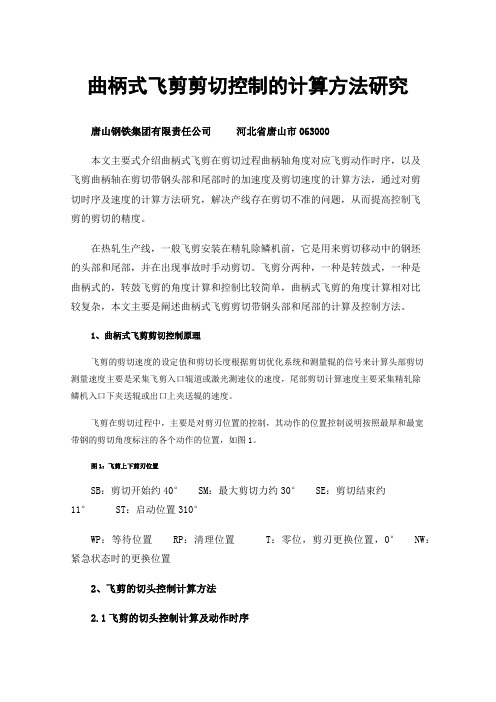
飞剪在剪切过程中,主要是对剪刃位置的控制,其动作的位置控制说明按照最厚和最宽带钢的剪切角度标注的各个动作的位置,如图1。
图1:飞剪上下剪刃位置SB:剪切开始约40° SM:最大剪切力约30° SE:剪切结束约11° ST:启动位置310°WP:等待位置 RP:清理位置 T:零位,剪刃更换位置,0° NW:紧急状态时的更换位置2、飞剪的切头控制计算方法2.1飞剪的切头控制计算及动作时序飞剪在头部剪切时一般设定辊道速度恒定,在PLC中超前率根据剪切速度来计算,超前率应能保证中间坯剪切后的前进速度。
角度系数“F”用于将剪刃水平速度转换为曲柄速度,它随曲柄角而变化,由系统根据剪切角设定,此剪切角是通过中间坯厚度和宽度确定,由此根据剪切时的辊道速度,加速度计算公式如下:=2.2飞剪的切尾控制计算及动作时序尾部剪切的飞剪速度随精轧机主速度根据精轧机速度模式控制,在剪切过程中它是可变的。
四连杆受力分析word版本
四连杆受力分析不计摩擦时机构的受力分析根据机构所受已知外力(包括惯性力)来确定个运动副中的反力和需加于该机构上的平衡力。
由于运动副反力对机构来说是内力,必须将机构分解为若干个杆组,然后依次分析。
平衡力(矩)一一与作用于机构构件上的已知外力和惯性力相平衡的未知外力(矩)相平衡的未知外力(矩)已知生产阻力平衡力(矩)一一求解保证原动件按预定运动规律运动时所需要的驱动力(矩)已知驱动力(矩)平衡力(矩)一—求解机构所能克服的生产阻力一.构件组的静定条件——该构件组所能列出的独立的力平衡方程式的数目.§3-4不计摩擦时机构的受力分析根据机构所受已知外力(包括慣性力)来确定个运动副中的反力和需加于该机构上的平衡力乜由于运动副反力对机构来说足内力,必须将机构分解为若干个杆组,然后依次分析多沪宰術力r«j ——与作用于机已知外力A18K力相平飯的未知外力(更)已知生产阻力平衡力(矩)——求解保证原动件按预定运动规律运动时所需要的驱动力(矩)已知驱动力(矩)■平衡力(矩)——求解机构所能克服的生产阻力r 构件组的静定条件——孩脚件组所能则出的独P 的力平痢疗程式的數目.用等于构件塑中險有力曲未知嬰素的数目。
豪丈首力毕衡方烈丸的it 貝=所有力召来知要盍的撤口 *2)移动副 ——(2个){-大*b ----- ?方向——垂直移动导路 柞用A ——?3)平面高副——(1个)「九 J* ?F ff :方匀一法线I 作用点——挟*k 点2•榔件t 运动聞中反力的未初里索"转动副——(2个)[X.4* ----- ?方甸——?杵用点——转动副中心A设某构件组共有H个构件.丹个低副.几个高副>一个构件可以列出s个独立的力平衡方程,用个构件共有佝个力平衡方程>一个平面低副引入2个力的未知数,的个低副共引入切彳个力的未知数>—个平面高副引入1个力的未知数.几个低副共引入几个力的未知数轲件《Li6奮龙秦件』| 3“匚2巧;耳而当构件组仅有低副时,则为* 3/f = 2P f结怡:空本杆组寿满足#岌条件二.用图解法作机构的动态静力分析步骤:1)对机构进行运动分析,求出个构件的。
浅谈如何做好曲柄式飞剪设备的精度管理

Sci e nce an d Te ch no l ogy I n n ove t i on He r a l d
浅谈如何做 好 曲柄式 飞剪设备的精度管理 ①
杨 彦广
( 首钢京唐钢铁有限责任公司热轧作业部
河北唐 山 0 6 3 2 0 0 )
摘 要 : 飞剪设备是热轧生产线关键的管控 设备 , 其状态的好坏 , 取 决于飞剪各安装部件之 问的间隙保证值。 如何 实施有效的管
理, 实现 对 各 管控 要 点状 态 的把 握 和 设 备 的稳 定 运行 , 避 免 较 大 的生 产 停机 事故 , 是 需要 设 备 管理 人 员重点 思 考 的 问题 。 该 文
内新 增 的 热 轧 生产 线 来 看 , 曲柄 式 飞 剪和 转 毂 式 飞剪 是 目前 验 平 台 固定 在平 直 检 验 平 面上 。 如果现场不具备条件, 可利 采 用较 多的 设 备类 型 。 相 对 于 转 毂 式 飞 剪, 曲柄 式 飞 剪在 设 用调 整螺 栓 进行 高度 调 整 , 保 证水 平度 在 ±5 mm范 围内 。
由两 台 电机 分 别驱 动 。其工 作 原 理 为 上下 电机 驱 动 曲轴 , 带 保证 在 1 0 mm左 右, 剪刃 间隙要 保 持在 2 mm左右 。 动 上下 刀 架 进 行 圆周 运 动 , 实 现 对 来 料 的 头 尾 剪切 ; 为了实 之 间, 由 一 台 同步 减 速 机传 递 相 同 转 速 。 剪切 过 程 中, 要 保
结合在设备管理中的一些个人体会及技术要求 , 总结了 做好飞剪设备精度管理的一些具体做法。 关键词 : 飞剪 精度 管理 间隙 润滑
曲柄连杆式飞剪机剪刃运动轨迹的数学模型研究

实 际 上 是 一 双 平 面 四 连 杆 机 构 [1], 该 剪 切 机 构 由 两 套 完 全 对 称 的 曲 间 t 一阶求导, 即可得到剪切刀刃 M 在坐标系中的水平速度:
柄连杆机构组成, 通过设置于剪切机构上对称的剪刃上下移动并旋
转 运 动 一 周 来 实 现 剪 切 。 上 下 剪 刃 分 别 与 连 杆 2 和 2 ’固 连 , 剪 切 过
从 图 中 可 以 看 出 , 除 了 车 牌 为 AA0413 车 辆 的 小 粒 径 的 质 量 浓 度 变 化 较 大 之 外 , 其 余 车 辆 的 排 放 颗 粒 物 质 量 浓 度 在 直 径 小 于 2um 的 范 围 内 差 异 很 小 , 只 是 在 直 径 大 于 2um 后 才 产 生 较 大 差 异 。
观 的 土 地 资 源 。复 合 芯 软 铝 导 线 的 电 导 率 达 到 63 .7 %IACS, 而 普 通 的
(作者单位系 1 远东控股集团 远东复合技术有限公司
钢 芯 铝 绞 线 电 导 率 为 61 - 62IACS% 。相 比 而 言 , 复 合 芯 软 铝 导 线 能 提
2 无锡职业技术学院)
图 2 DPF 前 端 取 样 颗 粒 物 数 目 浓 度 - 粒 径 分 布 从 图 中 可 以 看 出 , 多 数 车 辆 的 测 试 峰 值 粒 径 在 0 .12um 左 右 。 4.3 质量粒径分布
图 3 DPF 前 端 取 样 颗 粒 物 质 量 浓 度 - 粒 径 分 布
参考文献 [1] 杨 万 顺 . 浅 谈 柴 油 车 加 载 减 速 工 况 法 烟 度 测 试 . 城 市 管 理 与 科 技 . 2003. 5 [2]陈 长 虹 , 景 启 国 等. 重 型 机 动 车 实 际 排 放 特 性 与 影 响 因 素 的 实 测 研 究 [J]. 环 境 科 学 学 报 . 2005 [3] 胡 群 . 车 用 柴 油 机 排 放 物 有 害 成 分 的 分 析 与 控 制 . 内 燃 机 . 2003 ( 6) [4] 彭 美 春 , 赵 锌 泽 , 许 志 刚 等 . 重 型 柴 油 车 加 载 减 速 工 况 烟 度 排 放 特 性 [J]. 拖 拉 机 与 农 用 运 输 车 , 2005 ( 4 )
四杆机构构件的受力分析和强度

知识点总结 零件受力分析
一、柔性约束的特点:
只能受拉,不能受压。 只能限制延约束的轴线伸长方向 常见的柔性约束:绳子、皮带、链条等
柔索对物体的约束力沿着柔索背向被约束物体 胶带对轮的约束力沿轮缘的切线方向,为拉力
《机构设计与制作》
适用专业:模具设计与制造 机械系机械基础教研室
情境设计2
自动送料连杆机构的设计
单元5. 四杆机构构件的受力分析和强度 问题
目标:零件的受力分析及基本变形的判定
任务一:压力机的曲柄滑块机构中连杆、
滑块的受力分析
分析压力机的曲柄滑块机构的零部件的受力 来判断其变形形式,解决受力图和各种变形 的受力特点
? 平面力偶系 – 合成 – 平衡
力的平移定理
力和力偶都是力学基本物理量,二者不能等效替代,也不能互 相抵消各自的效应。但这并不是说,二者就没有联系,力的平 移定理就是用来揭示二者联系的一个定理。
力的平移定理实质上是将一个力分解在同平面的另一个力和 一个力偶。反之,同平面内的一个力和一个力偶也可以合成为 一个力。
1.遵守实验室(教室)相关规定
2.识别工具箱的工具,过程: 清理工具——弄清工具的使用方法——保管工具 (层层负责:个人-小组长-组长-科代表)
3.能力要求 a. 了解材料实验机的工作原理,能操作试验机测量; b. 能独。立测量实验相关参数,并正确读取数据; c.能正确处理数据。通过实验结果,能掌握塑性材料和 脆性材料拉压的力学性能,并了解两种材料在工程中的实 际应用。
2.虎克定律
实验表明,对拉(压)杆,当应力不超过某一限度时,杆的轴
四连杆机运动学讲解
栏杆机四杆机构运动学分析1 四杆机构运动学分析1.1 机构运动分析的任务、目的和方法曲柄摇杆机构是平面连杆机构中最基本的由转动副组成的四杆机构,它可以用来实现转动和摆动之间运动形式的转换或传递动力。
对四杆机构进行运动分析的意义是:在机构尺寸参数已知的情况下,假定主动件(曲柄)做匀速转动,撇开力的作用,仅从运动几何关系上分析从动件(连杆、摇杆)的角位移、角速度、角加速度等运动参数的变化情况。
还可以根据机构闭环矢量方程计算从动件的位移偏差。
上述这些内容,无论是设计新的机械,还是为了了解现有机械的运动性能,都是十分必要的,而且它还是研究机械运动性能和动力性能提供必要的依据。
机构运动分析的方法很多,主要有图解法和解析法。
当需要简捷直观地了解机构的某个或某几个位置的运动特性时,采用图解法比较方便,而且精度也能满足实际问题的要求。
而当需要精确地知道或要了解机构在整个运动循环过程中的运动特性时,采用解析法并借助计算机,不仅可获得很高的计算精度及一系列位置的分析结果,并能绘制机构相应的运动线图,同时还可以把机构分析和机构综合问题联系起来,以便于机构的优化设计。
1.2 机构的工作原理在平面四杆机构中,其具有曲柄的条件为:a.各杆的长度应满足杆长条件,即:最短杆长度+最长杆长度≤其余两杆长度之和。
b.组成该周转副的两杆中必有一杆为最短杆,且其最短杆为连架杆或机架(当最短杆为连架杆时,四杆机构为曲柄摇杆机构;当最短杆为机架时,则为双曲柄机构)。
三台设备测绘数据分别如下:第一组(2代一套)四杆机构L1=125.36mm,L2=73.4mm,L3=103.4mm,L4=103.52mm最短杆长度+最长杆长度(125.36+73.4) <其余两杆长度之和(103.4+103.52)最短杆为连架杆,四杆机构为曲柄摇杆机构图1-1 II-1型栏杆机机构测绘及其运动位置图第二组(2代二套)四杆机构L1=125.36mm,L2=50.1mm,L3=109.8mm,L4=72.85mm最短杆长度+最长杆长度(125.36+50.1) <其余两杆长度之和(109.8+72.85)最短杆为连架杆,四杆机构为曲柄摇杆机构图1-2 II-2型栏杆机机构测绘及其运动位置图第三组(3代)四杆机构L1=163.2mm,L2=64.25mm,L3=150mm,L4=90.1mm最短杆长度+最长杆长度(163.2+64.25) <其余两杆长度之和(150+90.1)最短杆为连架杆,四杆机构为曲柄摇杆机构图1-3 III型栏杆机机构测绘及其运动位置图在如下图1所示的曲柄摇杆机构中,构件AB为曲柄,则B点应能通过曲柄与连杆两次共线的位置。
飞剪的机构分析与设计
图 1一.工艺要求1.剪切运动速度为V t =2m/s 的钢板,拉钢系数δ=V 刀/ V t =[δ], [δ]=1.01~1.052.两种钢板定尺(长度)L=1m; 0.65m ;3.剪切时上下剪刃有间隙,剪切后上下剪刃不发生干涉(相碰);4.剪切时上、下剪刃沿钢板运动速度方向的速度相对误差: ΔV 刀≤0.05=[ε]二.给定参数1.工艺参数剪切力F=10T=98kN;支座A 距辊道面高约为 h ≈250mm(如图1);钢板厚度Δb=1mm;2.机构设计参数按定尺L=1m 给出机构的行程速比系数k 、远极位传动角2、摇杆摆角:表1 参数与方案三.设计内容1.根据工艺要求制定机构方案,定性比较各方案的优、劣;2.设计出满足工艺要求的机构尺寸及上下剪刃的位置尺寸;3.根据最终设计结果按比例绘制机构运动简图及上下剪刃的轨迹;4.进行机构的运动及力分析,检验上下剪刃的速度相对误差、拉钢系数是否满要求,并求出曲柄上的平衡力矩M b《飞剪机构分析与设计》指导书二,对剪机运动的要求:1.曲柄转一圈对钢材剪切一次;2.剪切时,上、下剪刃速度相对误差小于其许用值:△V 刀=2|V Et -V Ft |/(V Et +V Ft )≤ [ε] = 0.05.3.剪切时,上下剪刃应与钢材运动同步。
一般希望剪刃速度略大于钢材运动速度,即拉钢系数δ>1: V 刀= (V Et +V Ft )/2;δ= V 刀/ V t =[δ] =1.01~1.05. 4.能调节钢材的剪切长度L三,设定参数1.工艺参数剪切力F=10T=98kN 支座A 距辊道面高约为h ≈250mm 刀刃重合量Δh ≈5mm 钢板厚度Δb=1mm 2.机构设计参数按定尺L=1m 给出机构的行程速比系数k 、远极位传动角γ2、摇杆摆角ψ如表1所示。
四.机构的型综合首先对工艺要求进行分析,把工艺要求变换为对机构运动的要求,然后根据对机构的动作要求进行型综合。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
剪 切 力 4=>
应变仪输出电压 4<
*@*.@
(.@+’
1’1.+
!.*(!
’1(.1
!.’@A
A(A.!
*.6(6
@6@.’
*.@A1
&!&.!
1.(A1
!(+(.’
1.6*’
!!1!.6
1.+A&
!*1A.1
6.!**
!161.1
6.’@&
!6!6.*
6.@!’
Q 1?Q
重型机械
对表 !和 表 "的 数 据 进 行 #$ %#&’()*$(+ ,*(--&.’/分 析 0得 到 上 下 剪 刃 剪 切 力 的 线 性 回 归
曲线如图 12图 3所示4
"??! A.9D
图1
图3
上下剪刃剪切力的线性回归方程为5
上 剪 刃 5 67 "8891:3; <= !>"9?:: %@A/
%相关系数 B7?9CC3/
%!/
下 剪 刃 5 67 "C?9?>:; <= D"9CDC %@A/
%相关系数 B7?9CC8/
%"/
表
D 测试结果及分析
图*
/*0 为 了 使 改 造 后 剪 刃 的 受 力 状 态 与 简 支 梁 的受力状态更接近"排除剪刃背面与托架之间摩 擦力对弯曲变形的影响"将剪刃背面与托架相接 触的部分磨去 (.’,,"尽可能减小接触面%
/10 为 了 解 决 测 量 中 的 温 度 补 偿 问 题 " 在 选 定的测点位置粘贴四个温度系数相同的中温电阻 应变计"采用纵横各粘贴两个应变计的方式组成 全桥测量电路"由电桥的特性来消除温度变化对 测量结果的影响"测量原理如图 1所示%
4AA1 7P%?
切全过程!
重型机械
: D1:
图 " 上剪刃剪切力测试曲线
图 # 下剪刃剪切力测试曲线
$%& 实测剪切力与理论计算值的比较
飞 剪机最大 剪 切 力 的 理 论 计 算 公 式 为’()*+
94
, -./0123- 为 最 大 剪 切 断 面 积 3))456为 被 剪
材 料 的 抗 剪 强 度 3 78))4!
叙词 四连杆曲柄飞剪机 剪切力 测试 评估
$%&’()*’ +,-./0123-4/-5-6050,/789,.0-50.6:.6.6.3;5157<5,-./<7/2-7<<78/= >./316?.9-2/.6?<3;1695,-./!0,-/-.310;/-3.0176>-0@--60,-5,-./<7/2-.6:0-2,612.3 4./.A-0-/5!7<<-/169.B10.3>.515<7/4/7:82017643.6.6:5.<-74-/.0176!.6:0,-:-0-/= A16.01767<A.C1A8A 4/7:8201B-2.4.210;.6:B.31:-B.38.01767<@7/?276:101767<0,<3;1695,-./DE-,.B-573B-:A.6;:1<<128300-2,612.34/7>3-A5160,-0-50DF7/-C.A= 43-!0,-276B-/51767<50.0121650.>1310;5;50-A 7<50/-557<5,-./169-:9-!0,-1A4/7B-= A-607<5,-./169-:9-!0,-1A10.01767</-.35,-./169276:10176162.31>/.0176!0,-@.; ,7@ 079-00,-5196.37<5,-./<7/2-!27A4-65.01767<0-A4-/.08/-:8/16950/-55A-.= 58/-A-60.6:4/70-201767<,-.0.6:5776D
为 了 提 高 测 试 结 果 的 准 确 度 "排 除 间 接 标 定 ; 粘贴应变计等因数对测量结果的影响"对图 6所 示的剪切力测量系统进行直接标定%为了使标定 状态与实际剪切状态相一致"根据剪刃的刃口形 状 特 制 了 一 个 < 形 标 定 垫 块 /模 拟 实 际 剪 切 状 态 0"标定在 *(((=> 材力实验机上进行"标定数 据见表 !;表 *%
S 测试方法
]^_ 技术难点
*((! >C.1
重型机械
B 1&B
由图 !可以看出"剪切过程中剪切力的传递 路线为#剪刃$托架$连杆$曲柄轴$机架%分 析飞剪机剪切机构的结构形式和剪刃的受力可 知"测量剪切力有一定的技术难度%
从测量的角度看"选择剪刃作为获取剪切力 信号的对象"对测量最有利%但是取剪刃在剪切 力作用下的什么信号来代表剪切力"又怎样获取 该 信 号 "将 是 测 量 剪 切 力 的 最 大 技 术 难 点 %另 外 " 工作中被剪方 坯的 温度在 &’()左右"剪 刃 的 高 度尺寸较小"仅有 *+(,,"剪刃周围的热辐射很 大 "再 加 上 剪 刃 在 剪 切 时 作 快 速 平 面 运 动 "因 此 " 如何解决测量中的温度补偿和如何防护信号线也 是测量剪切力的技术难点% -.- 措施
C1?
!!1!9C8 !!8191?
硬线钢
1
MK1"83 !1";!1"
C3?
!?:198? !"?39>"
硬线钢
3
MK13D3 !1";!1"
888
!DC!93C !3!:913
硬线钢
>
MK1D8? !1";!1"
CD?
!D3:9>3 !D:39D"
硬线钢
:
NK>??: !1";!1"
CD?
!D"39!" !1!:9:3
四连杆曲柄飞剪机的剪机机构与其它飞剪机 的 剪切机构 M如摆式飞剪机N不同!如图 L所示" 四连杆曲柄飞剪机有两个上下对称布置结构相同 的四连杆机构!剪刃分别安装在两个机构的连杆 上!剪切时!剪刃靠连杆的平面运动来完成剪切 作用"
四连杆曲柄飞剪机的设计最大剪切力为 LOPP?Q!原 设 计 剪 切 方 坯 最 大 断 面 尺 寸 为 LRSAA
第 一作者T李彦峰!男!RR岁!教授级高工!西安重型机械研究 所 MULPPVSN
图L M.N四连杆曲柄飞剪机剪切机构 M>N摆式飞剪机剪切机构
WLRSAA!现需剪切断面尺寸为 LXPAAWLXPAA 的 方坯!飞剪机由两台 OYP?E 直流电机驱动!剪 切 温度为 ZPP[ LPPP\!剪切 速度 和定尺 长度由 计算机控制"
硬线钢
O根据用户的要求0表 D中只能给出被剪方坯材质的代号0软线钢和硬线钢是用户的 习 惯 叫 法4其中5JK!??8软线钢与 LD等同0MK1D8?硬线钢与 "?J*等同4
E9P 剪切力测试曲线 剪切不同规格或不同钢种的剪切力曲线形状
基 本 相 同0 文 中 给 出 的 是 剪 切 规 格 为 !1"HH; !1"HH0钢种为 MK1D8?0剪切温度为 CD?I的剪 切力曲线4 E9E 剪切力变化过程分析
剪切力 2
剪 刃 $ 测量桥 $ 应变仪
2 345转换 $ 采集系统 $ 打 印
图1
/60 为 了 解 决 热 辐 射 对 信 号 线 的 影 响 " 选 用 耐辐射的中温导线作为信号引出线"再将信号线 穿在金属软管中"并将经过防护的信号线在剪刃 与机架之间做成一个 789字形状"满足剪刃在快 速平面运动时信号线的收放问题% -.: 剪切力的标定
, DG1%DAL7 剪 切断面 1AA))K1AA))3钢种 IM1AAC3剪 切温度 GFAE方坯3实测剪切力的最大值为
(测 ,DCA%C?L7
(计)*+8(测 ,1%A4 >4@ 硬 线 钢 实 测 剪 切 力 与 理 论 计 算 剪 切 力 的 比较
在 G?AE时34AIJ的 ;<=,#"78))43剪切 1D4))K1D4)) 规格的方坯时3最大计算剪切力
1AAA 1AFA 11AA 11FA 14AA
H?
1#A 14G 1AA GD CD #D "" FD DD ?# ?4 4C 4F
DF ;<=8 ?A? 4D1 1#1 14A 11F GA ## "? F1 D4 ?F 4G 4# 4AIJ 78))4 4#A 41C 1F4 11F GF GF C" "" F4 DD ?D 4C 4"
‘ VO‘
重型机械
SPPL Q7^V
四连杆曲柄飞剪机剪切力测试与分析
西 安 重 型 机 械Байду номын сангаас研 究 所 李彦峰 李 强 上海宝钢设备检测公司 贝律仁 姚伟峰
摘要 通过对四连杆曲柄飞剪机剪切力的测试与分析!弄清了剪切力与工艺参数之间的定量关系! 为 合 理 安 排 生 产 !确 保 飞 剪 机 安 全 运 行 !掌 握 飞 剪 机 的 最 大 生 产 能 力 !正 确 评 估 飞 剪 机 的 工 作 状 态 提 供 了 重要依据"在测试中!解决了不少技术难题!如剪刃受力静不定系统的转化#剪刃的技术改造方法# 标 定 时 实 际 剪 切 状 态 的 模 拟 #剪 切 力 信 号 的 获 取 方 法 #应 力 测 量 时 的 温 度 补 偿 与 导 线 的 热 辐 射 防 护 等 "