并联机构工作空间方法的分析
3_PUU并联机构工作空间分析与优化设计
2
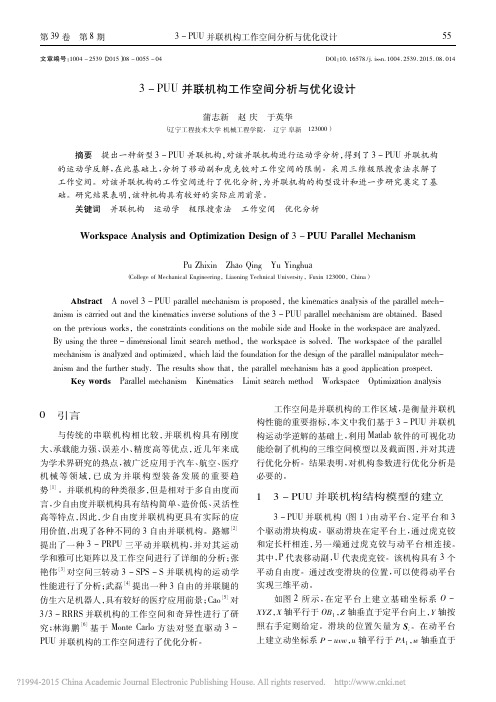
3 - PUU 并联机构运动学分析
A i 点的位置矢量为 在动坐标系 P - uvw 下,
P P P
A1 = r a [ 1
0
0]T sin( 2 π / 3 ) sin( 4 π / a [ cos( 2 π / 3 ) A3 = r a [ cos( 4 π / 3 )
0
引言
并联机构具有刚度 与传统的串 联 机 构 相 比 较,
工作空间是并联机构的工作区域, 是衡量并联机 构性能的重要指标, 本文中我们基于 3 - PUU 并联机 构运动学逆解的基础上, 利用 Matlab 软件的可视化功 能绘制了机构的三维空间模型以及截面图, 并对其进 行优化分析。结果表明, 对机构参数进行优化分析是 必要的。
并联机构末端参考点所能达到的位置的集合称
为机构的工作空间。 工作空间的大小代表了机构的
图1 3 - PUU 并联机构示意图
活动范围, 它是衡量并联机构工作能力的一个重要运 动学指标, 所以对并联机构的工作空间分析显得更为 重要 3. 1
[7 ]
。
影响并联机构工作空间的主要因素 在实际工作过程中, 影响机构工作空间的主要因
[9 - 10 ]
从图 5 中的 3 - PUU 可以看出, 该并联机构的工 作空间较大, 无空洞, 说明工作空间可以适合较大工 作空间作业。图 6 和图 7 表明了工作空间的边界线, 边界线关于 y 轴对称分布。 图 8 ~ 图 10 为工作空间 的截面图, 由于机构具有一定的对称性, 工作空间的 截面也是对称的。
2 2
蒙特卡洛法 本文中我们拟采用蒙特卡洛( Monte Carlo) 法对 3
- PUU 并联机构的工作空间进行分析, 下面作详细介
一种2T2R并联机构的位置逆解和工作空间分析

一种2T2R并联机构的位置逆解和工作空间分析贾竣臣薄瑞峰郭鑫鑫李瑞琴(中北大学机械工程学院,山西太原030051)摘要针对物流行业需要对大量商品快速分拣、包装的需求,提出了一种(2-RRR&RPR+R)&URS型4自由度并联机构,该机构由静平台、动平台、URS支链、以及与带有R副的连接平台相连接的两条RRR支链和RPR支链组成。
首先,运用螺旋理论对机构自由度进行分析,求得该机构可实现两转两移的4自由度运动;随后,采用解析矢量法对其进行位置逆解分析,运用数值搜索法并结合位置逆解方程求得工作空间,分析了机构的工作性能;最后,通过Matlab对位置逆解方程进行仿真,并利用Adams对求解结果进行验证,验证了机构逆解模型的正确性以及机构运动的可实现性。
结果表明,该机构能沿X轴方向大范围移动,在Y轴方向可实现大角度转动,可以代替物流行业的人工操作,提高工作效率。
研究结果可为机构的进一步动力学分析与应用提供理论基础。
关键词并联机构螺旋理论位置逆解工作空间Inverse Position Solution and Workspace Analysis of a2T2R Parallel MechanismJia Junchen Bo Ruifeng Guo Xinxin Li Ruiqin(School of Mechanical Engineering,North University of China,Taiyuan030051,China)Abstract Aiming at the demand of logistics industry for rapid sorting and packaging of a large number of commodities,a4-DOF parallel mechanism(2-RRR&RPR+R)&URS type is proposed.The mechanism consists of a stationary platform,a moving platform and a URS branch chain,as well as two RRR branch chains and RPR branch chains connected with a connecting platform with R pairs.Firstly,the degree of freedom is analyzed by using the screw theory to institutions,get the mechanism can be realized to achieve two turn four degrees of free⁃dom of movement,then by using the method of analytic vector inverse position analysis and using numerical search method combined with the inverse position equation,finding work space analysis work performance,and finally the position inverse equation by Matlab simulation,and by using the Adams results for validation,to prove the validity of the inverse kinematics model of the mechanism as well as the mechanism motion can be re⁃alized.The results show that the mechanism can move in a wide range along the X-axis direction and rotate at a large angle in the Y-axis direction,which can replace the manual operation in logistics industry and thus im⁃prove the work efficiency.The results can provide a theoretical basis for further dynamic analysis and applica⁃tion of the mechanism.Key words Parallel mechanism Screw theory Inverse position solution Workspace0引言随着科学技术的深入发展,并联机构的相关研究渐渐发展成为机构学理论的一个分支,并得到了学术界的广泛关注与重视[1]。
并联机构工作空间方法的分析
并联机构工作空间方法的分析引入并联机构的定义以及其具有的优点。
相对串联机构,并联机构刚性好,具有高的稳定性;惯性较小、动态响应好、累积误差小等特点成为学者的研究热点。
并联机构的工作空间是机构性能的重要指标。
文中总结并联机构工作空间求解的方法以及各种方法的特点及区别,为并联机构的应用和研究提供理论意义和实用价值。
标签:并联机构;工作空间;求解方法并联机构是机械、电子及计算机控制相结合的产物,是机器人学的一个重要分支。
并联机构的定义:由2个或2个以上的独立运动链连接动平台和静平台,通过并联方式驱动的闭环系统。
与串联机构相比,并联机构具有的优点:闭环支链结构刚度大,稳定性较好;运动惯性小、动态响应快、累积误差小、精度较高等;其中对于完全对称的并联机构具有较好的各向同性,可以避开机构的奇异点等,使得并联机构得到广泛的应用及发展[1]。
最早并联机构由学者Stewart提出的6自由度Stewart平台机构,该机构具有输出精度高,承载能力强以及易于控制,将其应用在飞行三维空间模拟器中。
由学者Fichter和Sugimoto将此平台用于操作器和力矩传感器。
并联机构中包含一类自由度小于6称少自由度并联机构,为并联机构中的重要分支[2]。
相对于6自由度并联机构,少自由度并联机构具有结构简单、造价低,易于控制优点。
Hunt提出一种3自由度并联平台机构,该并联机构动平台末端输出为2个转动自由度和1个移动自由度。
Gosselin提出了平面和球面3自由度机器人。
黄真和赵铁石综合出一种4-URU对称4自由度并联机构,可以实现3个移动自由度和1个转动自由度。
少自由度并联机构适合应用在模块化可重组制造系统中。
可用来构造串、并联机构、微动机构特殊用途机器人,从而进一步促进并联机构的实用性。
1 并联机构工作空间的定义及分类并联机构的工作空间定义[3]为:当给并联机构的驱动构件输入驱动时,动平台输出末端的参考点的所有运动区域,也即为此并联机构的工作空间。
并联机构工作空间方法的分析

并联机构工作空间方法的分析并联机构是指由若干个运动副构成的平行结构,其中多个副同时对同一运动变量进行控制。
不同于串联机构,其运动自由度数目可以大于其中每个运动副的自由度数目之和。
并联机构不仅具有高刚度、高精度、高载荷能力等优势,还能够提供更大的工作空间并实现高精度运动和控制。
工作空间是指机构能够执行运动的位置和方向的组合。
在分析并联机构的工作空间时,应先确定其基本运动副及其限制条件,然后对每个基本运动副进行建模,最后求解并联机构的整体工作空间。
在基本运动副建模方面,目前主要有基于Minkowski(闵可夫斯基)和基于代数运算等两种方法。
基于Minkowski方法是将运动副看做一些联立的凸多面体,通过求解这些多面体的Minkowski和来得到机构的工作空间边界。
该方法的优势在于其高精度且应用范围广泛;缺点则是其计算复杂度较高,对于大型机构而言时间较长。
基于代数运算的方法则是基于运动副的运动学关系以及代数方程求解的原理,其优势是可以有效解决复杂机构的计算问题,但其缺点是对于数学求解能力要求较高。
在整体工作空间求解方面,可使用约束优化方法、遗传算法、神经网络等较为常见的算法。
其中,约束优化方法是一种以优化函数为目标,通过求解约束条件的方法得到最优解的算法。
而遗传算法和神经网络则是通过模拟自然界进化和人类神经网络的工作原理来求解并联机构的工作空间。
需要注意的是,由于并联机构存在多个运动副同时控制同一运动变量的情况,因此运动副之间的干涉问题需要得到充分的考虑。
在机构设计过程中,需要进行多次优化以及演示分析,以保证机构的工作稳定性和灵活性。
综上所述,分析并联机构的工作空间是一个十分重要而复杂的问题。
该问题需要考虑机构的设计、运动干涉等复杂因素,需要运用数学、计算机技术等多种专业知识和技能来解决。
近年来,随着机器人等高精度机电一体化系统的不断发展和应用,对并联机构工作空间分析的研究也将越来越深入和广泛。
并联机构工作空间方法的分析

并联机构工作空间方法的分析
并联机构是一种常见的工程机械结构,它通过多个并联的连杆或轴来实现机械传动和工作空间的控制。
在工程设计和机械运动控制领域,对并联机构工作空间的方法分析是非常重要的,因为它能够帮助工程师和设计师了解并联机构的运动特性,优化机构结构和控制系统。
一般来说,对并联机构工作空间的方法分析主要包括以下几个方面:工作空间的定义和表示方法、工作空间的几何特性分析、工作空间的优化设计和控制策略的研究。
以下将对这几个方面进行详细分析。
工作空间的定义和表示方法是对并联机构工作空间方法分析的基础。
工作空间通常可用数学方法来描述,它是机构在给定位置和姿态下能够达到的所有可能的位姿和方向的集合。
常用的方法有基于欧拉角、四元数和转动矩阵的表示方法,这些方法能够有效地描述机构的位姿和方向,并为后续的工作空间分析提供基础。
工作空间的几何特性分析是对并联机构工作空间方法分析的重要内容。
在这一方面,通常需要进行机构运动学分析和几何建模,通过求解机构的运动学方程和几何限制条件,得到机构的工作空间和其几何特性,如面积、体积、最大位移等。
这些几何特性能够为机构设计和控制提供重要的参考依据,使工程师和设计师能够更好地理解并联机构的工作特性。
工作空间的控制策略的研究是对并联机构工作空间方法分析的重要内容之一。
在实际应用中,机构的工作空间通常需要通过控制系统来实现,因此需要研究机构的控制策略和方法。
这包括对机构运动学和动力学的建模和仿真,对机构运动轨迹和工作空间的路径规划和控制,以及对机构的传感器和执行器的集成和控制算法的设计等内容。
这些研究能够帮助工程师和设计师更好地实现对并联机构工作空间的控制和优化。
并联机构工作空间方法的分析
并联机构工作空间方法的分析并联机构是指由多个平行连接的机构成为一个整体的机构,并且各个机构的端部都连接在一个移动平台上。
由于并联机构的结构特点和运动特性,使其在实际应用中具有广泛的应用前景。
并联机构的工作空间分析是指研究机构在各个自由度上能够达到的位置的空间范围,通过对工作空间的分析可以发现机构的最优设计方案,也可以作为机构控制算法的基础。
本文通过解析并联机构运动学进行点的追踪和空间区域的计算,具体阐述了并联机构工作空间的方法分析。
1. 并联机构的运动学并联机构是一个复杂的系统,机构中的每个部件都是由一些特定的活动单元构成,并且这些活动单元之间通过连接装置连接在一起。
因此,机构的运动学可以通过各个活动单元的运动来描述。
并联机构的运动学方程可以表示为:F_1(x_1, y_1, z_1) + F_2(x_2, y_2, z_2) + ... + F_n(x_n, y_n, z_n) = 0其中,F_i 表示第 i 个活动单元的旋转和转移运动,(x_i, y_i, z_i) 表示第 i 个活动单元的位移向量。
并联机构的运动学分析需要通过运动学基本参数的计算和方程的求解来完成。
由于并联机构的结构复杂,运动学分析过程中需要使用较为复杂的数学方法,如向量代数、矩阵运算等。
通过运动学分析可以得到并联机构各个自由度的移动范围,进而分析机构的工作空间。
并联机构的工作空间计算方法可以分为两大类,一是几何法,二是向量法。
(1) 几何法几何法是通过几何分析来计算并联机构的工作空间。
将机构各个部件的长度、角度、形状等几何参数代入相应的几何模型中,运用几何关系计算出机构在各自由度上的工作空间。
几何法的优点是计算简单,直接,易于应用。
但是,几何法受制于机构结构和形状的限制,难以解决复杂机构的工作空间分析问题。
另外,对于活动单元的未知参数难以求出,也是几何法的局限之一。
(2) 向量法向量法是指利用向量运算来计算并联机构的工作空间。
并联机器人的工作空间分析

8.1 并联机器人的工作空间的概念
4)灵巧工作空间 灵巧工作空间又称灵活工作空间,是指操作器可以从 任何方向到达的点的集合,或者说,在灵巧工作空间内的任 意位置点,操作器能从所有方位到达,再或者说,在操作器 全方位空间下,操作器具有最大位置的工作空间。 灵巧工作空间不要求操作器的位 置最大,只要求操作器具有全方位,对 于进动角来说,进动角为0~360º。
ni 在定坐标系OXYZ下的位置的列矩阵:
A ni
A L~i A Li1 A L~i A Li1
(8-9)
图8-2 相邻两连杆间的连杆间距
8.2.2 并联机器人的工作空间的限制条件
4. 奇异位形的限制条件
并联机构不产生奇异位形的限制条件:
det J q 0
(8-10)
图8-1 具有操作器的6-SPS并联机构
3. 操作器的方位表示 最常用的操作器的方位参数或姿态参数是欧拉角中的进 动角 、章动角 和自旋角 ,也有用其他形式的欧拉角或用 RPY角。 操作器固定在动平台上,动平台与操作器的方位参数相 同。
8.1 并联机器人的工作空间的概念
4. 工作空间的表示 工作空间的边界在二维平面上表现为曲线,在三维空间 中表现为曲面,在大于三维的超空间中,用曲面表示3维工 作空间的边界,且用文字、色彩等表示第4、5和6维的工作 空间。 工作空间等于或大于三维时,可绘出工作空间曲面的截 面,这可清楚表达工作空间内部的结构。可以用直角坐标表 示工作空间的曲线和曲面,也可以用极坐标表示工作空间的 曲线和曲面,用何种形式的坐标表示工作空间的曲线和曲面, 以清楚和方便地表达工作空间为原则。
图8-1 具有操作器的6-SPS并联机构
8.2.1 具有操作器的6-SPS并联机构及操作器的位姿分析
并联机构工作空间方法的分析
并联机构工作空间方法的分析【摘要】本文主要介绍了并联机构工作空间方法,包括其基本概念、数学建模、优势和局限性、应用领域以及发展趋势。
通过对并联机构工作空间方法的深入分析,揭示了该方法在机器人领域中的重要性,并展望了未来的发展方向。
文章指出并联机构工作空间方法在提高机器人精度、灵活性和速度方面的潜力,同时也提出了未来可能的研究方向,为该领域的进一步发展提供了有益的参考。
通过该研究,可以更好地了解并利用并联机构工作空间方法,推动机器人技术的发展,为未来的智能制造和自动化领域带来更多的可能性。
【关键词】并联机构、工作空间方法、背景、意义、目的、基本概念、数学建模、优势、局限性、应用领域、发展趋势、重要性、未来展望、研究方向。
1. 引言1.1 介绍并联机构工作空间方法的背景随着工业4.0的到来,对于并联机构工作空间方法的研究被赋予了更高的期望。
并联机构可以在较小的空间内完成复杂的运动任务,因此在具有空间限制的场景下具有独特的优势。
目前,研究人员们正致力于探索如何进一步提高并联机构的性能和适应性,以满足不断变化的市场需求。
在本文中,我们将介绍并联机构工作空间方法的基本概念和数学建模,探讨其优势和局限性,分析其应用领域和发展趋势。
通过深入研究并联机构工作空间方法,我们可以更好地理解其在工程领域中的作用与重要性,为未来的研究和应用提供有益参考。
1.2 说明研究的意义并联机构工作空间方法的研究具有重要意义。
通过对并联机构工作空间方法进行深入研究,可以帮助人们更好地理解并联机构的工作原理和特性,从而为机器人设计和控制领域提供理论支持和指导。
通过研究并分析并联机构工作空间方法的优势和局限性,可以为工程师们选择合适的机构设计方案和控制策略提供参考,有助于提高机器人系统的性能和效率。
深入研究并联机构工作空间方法的发展趋势和应用领域,有助于开拓新的机器人应用领域,推动机器人技术的进步和发展。
研究并联机构工作空间方法具有重要的理论和实践意义,对促进机器人技术的发展和应用具有积极的推动作用。
新型三自由度并联机构工作空间分析
当 ≥ 时 , 动平 台无法从定平台内部通过 ; 当R L > 旦 时 动平 台可 以从定 平台 内部通过 , 但
图 1机构三维模型
f i( ; i m xL )兰 m nL )! a ( ! ,
, 1
{
,
}( 12 . ) i … , = 6
J
() 2
i a (i <S m xSS) … - 式 中: 各伸缩杆的长度 ; 一
S
.
、
S一与动 、 i 定平台相连球铰的半锥角 ;
_ 集成制造系统 ,0 0 2 1. 正[] J. 机械工程学报 ,9 69 — 0 . 19 :9 1 1
械 工 程 ,9 9 19 1 19 :0 — 1 1.
6结 论
针对复杂 曲面精加工提出了一种投影法精加工刀轨生成方 法, 将投影法刀轨生成和刀轨干涉处理统一在一个过程中 , 按照
如图 4所示。 机构的动 、 定平台上建立坐标系, 动坐标系{ } - ~ 建立在动 支链最小杆 长单独约束下 的运动轨迹 , : XY P
在坐标系{ 中的空间位置 , ,= Y z) U} 其中 R ( P r 运用坐标 变换求得运动学反解方程 :
可 得如 下 结 论 :
点, 逐步成为机构学领域新的研究热点, 在工业领域有着广阔的应用前景。 针对并联机构工作空间较小 的特点 , 对一种 新型三 自由度 并联机 构进行研 究 。 该机 构 的工作 空间对称分 布 于定平 台的两侧 。 分析 在
其 结构特 点的基 础上 , 导 出其 位置反 解 方程 。根 据 约束条件 , 用数值 方 法绘 制 出工作 空间的三 维立 推 采
mu hwd r p l ai f rgo n eid sr etr o li e rbe l okp eo e c ie pit o oe ru di t uta sc . r ovn t o lm o s l rs a t a c n nh n i l oF s g h p f ma w c fh
并联机构工作空间方法的分析
并联机构工作空间方法的分析
并联机构是机构中的一种重要形式,由多个并联的杆件和连接件组成,具有灵活性强、工作空间大的特点。
并联机构是机械装置中最常见的一种形式,广泛应用于各个领域。
分析并联机构的工作空间方法,可以采用几何方法或者代数方法进行计算。
几何方法
一般是通过几何关系来计算工作空间的位置和范围,而代数方法则是通过建立机构的运动
学方程来计算工作空间。
一、几何方法的分析
1. 几何约束方法:通过机构的几何特性来分析其工作空间。
对于一个平行四边形构
成的并联机构,可以通过几何约束来计算出杆件的运动范围,从而确定工作空间的位置和
范围。
2. 图形法:通过绘制机构的运动图形或者使用CAD软件进行仿真,来直观地分析并确定工作空间。
图形法可以直观地表示机构的运动轨迹,对于空间位置的分析非常有效。
二、代数方法的分析
1. 运动学方程法:通过建立机构的运动学方程,利用矢量分析和运动链分析来计算
机构的工作空间。
运动学方程法要求对机构的运动学特性有一定的了解,可以通过数学计
算来得出机构的工作空间。
在分析并联机构的工作空间方法中,几何方法和代数方法是最常用的两种方法。
几何
方法简单直观,适用于对机构的整体结构和几何特性进行分析;而代数方法则更加精确,
适用于对机构的运动学特性和运动轨迹进行分析。
无论采用哪种方法,都需要对并联机构
的结构和运动学特性有一定的了解,才能准确地分析其工作空间。
并联机器人的工作空间分析

并联机器人的工作空间分析并联机器人是指由多个自由度的机械臂并联组成的机器人系统。
与串联机器人相比,它具有更高的刚度、精度和重负荷能力。
在实际应用中,机器人的工作空间分析是非常重要的,因为它可以帮助工程师确定机器人可以到达的位置和姿态范围,从而指导机器人的路径规划和任务执行。
1.坐标系的建立:在进行工作空间分析之前,首先要建立合适的坐标系。
对于并联机器人来说,常用的坐标系有世界坐标系、基座坐标系和工具坐标系等。
世界坐标系是地面上的固定坐标系,用于描述机器人在空间中的位置和姿态。
基座坐标系是机器人基座上的坐标系,用于描述机器人基座相对于世界坐标系的位置和姿态。
工具坐标系是机器人末端执行器上的坐标系,用于描述末端执行器相对于基座坐标系的位置和姿态。
2.正运动学分析:正运动学分析是根据机器人的结构参数和关节角度,计算机器人末端执行器的位置和姿态。
对于并联机器人来说,正运动学分析通常采用解析法或迭代法进行计算。
通过正运动学分析可以确定机器人工作空间的形状和范围。
3.雅可比矩阵的计算:雅可比矩阵是机器人运动学分析中的重要工具,用于描述机器人末端执行器位置和姿态变化与关节角速度的关系。
通过雅可比矩阵的计算,可以确定机器人在一些给定位置和姿态下的可达性和灵敏度。
4.工作空间约束分析:工作空间约束分析是指确定并联机器人工作空间的边界和限制条件。
常见的工作空间约束包括关节极限、机构碰撞、着地约束等。
通过工作空间约束分析,可以避免机器人在工作过程中发生碰撞或超出设计范围的问题。
5.相对运动学分析:相对运动学分析是指描述机器人末端执行器相对于基座坐标系的运动范围和姿态变化。
常见的相对运动学分析方法包括球面坐标系描述法、欧拉角描述法和四元数描述法等。
通过相对运动学分析,可以确定机器人在不同工作姿态下的工作空间范围和运动自由度。
6.碰撞检测和障碍物规避:在工作空间分析中,还需要考虑到机器人在工作过程中可能遇到的障碍物和环境限制。
并联机构工作空间方法的分析
并联机构工作空间方法的分析1. 引言1.1 背景介绍并联机构是一种具有多自由度和高刚度的机械结构,被广泛应用于工业机器人、航天器、医疗设备等领域。
并联机构工作空间是指在机构运动的过程中,末端执行器能够达到的各个位置,是评价机构性能的重要指标之一。
对并联机构工作空间的研究可以帮助优化机构设计、改善机构性能,并推动相关领域的发展。
随着现代制造技术的不断发展,对并联机构工作空间的要求也越来越高。
工作空间的大小、形状、稳定性等特性直接影响着机构的工作效率和精度。
研究并联机构工作空间的方法对于提高机构的性能和应用范围具有重要意义。
本研究旨在探讨并联机构工作空间的方法,分析影响因素并总结已有方法,同时提出新的研究思路和方法。
希望通过本研究的实验验证,进一步完善并优化并联机构的工作空间,为相关领域的发展提供理论支持和实践指导。
1.2 研究目的研究目的主要是为了深入探讨并联机构工作空间的特性和影响因素,进一步探讨已有方法的优缺点,提出新的方法并进行实验验证,以期能够为并联机构工作空间的设计和优化提供更加科学和有效的指导。
通过本研究,可以全面了解并联机构工作空间的概念和特点,分析影响工作空间的因素,归纳总结已有的研究方法并进行比较,同时探索提出新的方法来优化工作空间设计,最终通过实验验证来验证方法的有效性,从而为未来研究和工程应用提供参考。
希望通过本研究能够促进并联机构工作空间的研究和应用,为相关领域的发展贡献力量。
1.3 研究意义并联机构是一种重要的机械结构,广泛应用在工业生产和机器人领域。
并联机构的工作空间是指机构能够执行运动的范围,它直接影响到机构的运动性能和工作效率。
对并联机构工作空间的研究具有重要的理论意义和实际应用价值。
研究并联机构工作空间有助于深入了解机构的运动规律和特性,为工程师设计和优化并联机构提供理论依据和技术支持。
通过分析并联机构工作空间的影响因素,可以指导工程师合理设计机构结构和工作参数,提高机构的运动稳定性和精度。
chapter3-2并联机构的工作空间分析
§3.5 工作空间的分类
1、位置空间 2、姿态空间 3、灵巧空间 4、可达空间
§3.5 工作空间的分类
1、位置空间(定姿态空间)
给定平台姿态的条件下,参考点所能达到的所 有位置
姿态角: φ0 , θ0 , ψ0 T
CB A
φθψ0
θ 10 φ ψ 0
§3.5 工作空间的分类
1、位置空间(定姿态空间)
J lq A1B
l1
l2
A
l3
l4
l5
l6
li bi
ai Op
t
Ob
i 1~ 6
B
t
a1
b1
t a2 b2
t a3 b3
t a4 b4
t a5 b5
t
a6
b6
T
a1 (t b1) a2 (t b2 ) a3 (t b3) a4 (t b4 ) a5 (t b5 ) a6 (t b6 )
J. Angeles
O. Ma, J. Angeles Architecture singularities of platform manipulators
IEEE International Conference on Robotics and Automation,1991
课程回顾 Al Bq
2) 可达空间计算
§3.7 工作空间的计算与表示
2) 可达空间计算
2m 3.2m
§3.7 工作空间的计算与表示
2) 可达空间计算
Y Lu,Y Shi, B Hu Yanshan University,
Solving reachable workspace of some parallel manipulators by computer-aided design variation geometry. IMechE 2008
基于SKC的新型3T并联机构的运动学、奇异性和工作空间分析

2023年第47卷第7期Journal of Mechanical Transmission基于SKC的新型3T并联机构的运动学、奇异性和工作空间分析赵一楠1沈惠平2陆晨芳1黄晓萍1(1 南京机电职业技术学院,江苏南京211306)(2 常州大学现代机构学研究中心,江苏常州213016)摘要基于方位特征(POC)方程的并联机构拓扑设计理论与方法,设计了一种可用于抓取的新型三平移(3T)并联机构。
首先,阐述了整个机构的设计过程并对机构的基本拓扑特征进行了分析计算,证明该机构包含两个耦合度κ为0的子运动链(SKC);接着,根据基于拓扑特征的并联机构运动学建模原理,以SKC为序,分别对机构的位置正、反解及其构型进行了求解与分析;然后,根据基于SKC的奇异性分析方法,计算分析了该机构每个SKC内部发生第一和第二类奇异时对应的奇异位形;最后,分析并选取出该机构内部速度传递因数指标较优的任务工作空间。
研究为该机构后续的刚度、动力学分析及工程样机设计奠定了基础。
关键词并联机构子运动链耦合度速度传递因数工作空间Kinematics, Singularity and Workspace Analysis of a Novel 3T ParallelMechanism Based on SKCZhao Yi′nan1Shen Huiping2Lu Chenfang1Huang Xiaoping1(1 Nanjing Vocational Institute of Mechatronic Technology, Nanjing 211306, China)(2 Research Center of Modern Mechanisms, Changzhou University, Changzhou 213016, China)Abstract According to the theory and method of topological design of the parallel mechanism (PM) based on position and orientation characteristic (POC) equations, a novel three-translation (3T) parallel mechanism for grasping is proposed. Firstly, the design process of the entire PM is described and the main topological features of the mechanism are analyzed. It is proved that the mechanism contains two sub-kinematics chains (SKCs)whose coupling degree equals 0. Secondly, according to the kinematics modeling principle for parallel mecha⁃nism based on topological features, the direct kinematics problem (DKP) and inverse kinematics problem (IKP) of the mechanism are solved according to the order of SKC. Then, according to the singularity analysis method based on SKC theory, the first and second kind of singular configurations in each SKC are analyzed. Finally, the task workspace with the optimal internal velocity transmission factors index of the mechanism is analyzed and se⁃lected. This study lays the foundation for the stiffness, dynamics and engineering prototype design of the mecha⁃nism.Key words Parallel mechanism Sub-kinematics chain Coupling degree Velocity transmission fac⁃tor Workspace0 引言三平移(3T)并联机构因其具有有效工作空间大、动态性能好等优点,为国内外学者最早研究的一类并联机构。
3-RPR并联机构的工作空间分析

( ) ( ) éëx - - Pix¢ cosq + Piy¢ sin q + Bix ùû2 + éë y - -Pix¢ sin q - Piy¢ cosq + Biy ùû2 = li2(1)
每条支链的长度范围是 limin~limax,因为支链都是移动副。 而定平台和动平台由转动副相连,所以可以知道第 i 条支链 的可达范围是以 Ai 为圆心,分别以杆的最长和最短时为半径 画圆,两圆之间的部分即为构件的工作空间。需要说明的是,
3
-
5 2
-
3 4
3
-
3 4
1 .5
6
2
5 2
3
5 -2
3 4
3
3 -4
1 .5
6
3
0
5
0
3 2
1 .5
6
让动平台的尺寸不变,改变固 定平 台 的尺 寸 大 小,得
出并联机构不同的工作空间大小 。如图 3 所示,从左向右
表示,当
θ=0 、θ=
π 4
、θ=
π 3
时,3-RPR 并联 机 构的 工 作
空间。由此看出,3-RPR 并联机构的工作空间随着固定平
关键词:3-RPR 机构 MATLAB 工作空间
引言 并联机构的工作空间即为机构末端执行器的工作区
域,也即机构动 平 台的 轨 迹范 围 。本 文 针对 3-RPR 机 构 , 采 用 圆 弧 相 交 的 几 何 方 法 求 解 机 构 的 工 作 空 间 ,用 MATLAB 编程,使机构的工作空间分析更加清晰。 1 3-RPR 并联机构构型
用 位 姿 角 、动 平 台 的 大 小 、固 定 平 台 的 大 小 等 因 素 来 研究 3-RPR 并联机构的工作空间。表 1 为 3-RPR 并 联 机 构的结构参数。下面将根据表 1 讨论位姿角对工作空间 的影响。
并联机构工作空间方法的分析
并联机构工作空间方法的分析【摘要】本文主要探讨了并联机构工作空间方法的分析。
在介绍了本文的研究背景和意义。
在首先建立了工作空间模型,然后详细分析了空间约束建模方法的应用,接着讨论了基于启发式规则和机器学习的工作空间优化方法。
在综合分析部分对各种方法进行了比较和总结。
通过对不同工作空间方法的分析,可以帮助工程师们更好地设计并联机构,提高工作效率和性能。
结论部分总结了本文的主要观点,并展望了未来可能的研究方向。
通过本文的阐述,读者可以更深入地理解并联机构工作空间方法的研究现状和发展趋势。
【关键词】并联机构、工作空间、方法、分析、模型、空间约束、建模、启发式规则、优化、机器学习、综合分析、结论1. 引言1.1 引言在工程学领域,机构的工作空间分析是一个非常重要的问题。
而其中的并联机构更是一种特殊的机构形式,其工作空间分析更是具有一定的挑战性。
在这篇文章中,我们将对并联机构工作空间方法进行深入分析。
我们将建立工作空间模型,通过数学建模的方法准确描述并联机构的工作空间特征。
然后,我们将探讨空间约束建模方法的应用,通过建立约束模型来限制机构的运动范围,进一步细化工作空间的特性。
接下来,我们将介绍基于启发式规则的工作空间优化方法,通过制定一系列规则来优化机构的工作空间,提高机构的性能。
然后,我们将介绍基于机器学习的工作空间优化方法,通过机器学习算法来自动优化并联机构的工作空间,实现更高效的设计。
在综合分析部分,我们将对以上方法进行比较和总结,探讨它们各自的优缺点和适用范围,为工程师在设计并联机构工作空间时提供参考。
通过本文的阐述,我们希望能够对并联机构工作空间方法有一个深入的理解,并为工程师在实际设计中提供有益的启示和帮助。
2. 正文2.1 建立工作空间模型建立工作空间模型是并联机构工作空间方法分析的重要一步。
在这一部分,我们将讨论建立工作空间模型的基本原理和方法。
建立工作空间模型需要考虑机构的机械结构和运动学特性。
并联机构工作空间方法的分析
并联机构工作空间方法的分析并联机构工作空间方法是一种用于设计和分析机械装置工作空间的方法。
通过对工作空间的分析,可以优化并联机构的设计,提高其性能和效率。
本文将对并联机构工作空间方法进行分析,探讨其原理和应用。
一、工作空间的定义工作空间是指机械装置中可用于执行任务的区域。
对于并联机构而言,工作空间是六维度空间中的一个特定区域,其中包括三个平移自由度和三个旋转自由度。
工作空间的大小和形状直接影响了机构的性能和作业范围。
分析工作空间成为了优化机构设计的重要一步。
二、并联机构工作空间方法1. 构建运动学模型并联机构的运动学模型描述了机构中各个链接之间的几何关系和运动规律。
通过构建运动学模型,可以确定机构的工作空间,并对其进行分析。
一般来说,运动学模型包括机构的连杆参数、关节参数以及传动机构等。
通过运动学模型,可以求解机构的工作空间以及相关的性能指标。
2. 确定工作空间边界根据机构的运动学模型,可以确定机构的工作空间边界。
在确定工作空间边界时,需要考虑机构的所有可能运动状态,并对其进行综合分析。
通常情况下,工作空间边界是通过机构的连杆长度、关节角度和传动比等参数来确定的。
确定了工作空间边界之后,可以进一步分析机构的性能和工作范围。
3. 优化工作空间一旦确定了机构的工作空间边界,就可以进行工作空间的优化设计。
优化工作空间的目标是最大化空间利用率,提高机构的性能和效率。
通常情况下,工作空间的优化设计包括几个方面:一是通过改变机构参数来扩大工作空间,例如改变连杆长度、关节角度等。
二是通过改变传动机构来优化机构的运动规律,提高工作空间的利用率。
三是通过改变机构的结构形式来优化工作空间,提高机构的适用范围和灵活性。
1. 工业生产在工业生产领域,并联机构工作空间方法被广泛应用于工程机械、装配线、自动化生产线等领域。
通过分析机构的工作空间,可以优化机构设计,提高生产效率和质量。
例如在汽车生产线上,通过分析机器人的工作空间,可以确定机器人的作业范围,提高装配精度和速度。
并联机构工作空间方法的分析
并联机构工作空间方法的分析并联机构是一种常见的机械结构,由多个并联连接的运动副组成。
它通常用于工业生产中的机械装置和设备中,以实现特定的工作任务和运动。
在这种机构中,每个并联连接的运动副都具有各自的工作空间,它们的运动轨迹可以相互重叠或者独立运动,这就使得并联机构的工作空间方法非常重要。
本文将对并联机构工作空间方法进行分析,探讨其在工业生产中的重要性以及优缺点。
我们来探讨并联机构工作空间方法的重要性。
在工业生产中,机构的工作空间是指机构可实现运动的空间范围,也被称为机构的有效运动。
工作空间的大小和形状直接影响了机构在实际应用中的适用性和灵活性。
并联机构的工作空间方法能够有效地描述机构的运动范围和限制条件,对于设计和优化机构具有重要的指导意义。
我们来谈谈并联机构工作空间方法的优点。
通过对机构的工作空间进行分析,可以有效地评估机构设计的合理性和实用性。
这对于设计人员来说是非常重要的,能够帮助他们及时发现并解决机构设计中存在的问题,提高机构的工作效率和稳定性。
工作空间方法可以帮助设计人员优化机构的结构,提高机构的运动精度和稳定性。
通过对机构的工作空间进行分析,可以明确每个运动副的运动轨迹,从而帮助设计人员合理分配机构各个运动副的结构参数,使得机构的运动更加精准和稳定。
工作空间方法还可以帮助设计人员评估机构的可靠性和安全性,为机构的应用和维护提供重要的参考依据。
然后,我们来探讨并联机构工作空间方法的局限性。
由于并联机构通常由多个运动副组成,其工作空间方法需要考虑的因素很多,包括各个运动副的相互影响和限制条件等,这就使得工作空间方法的分析和计算较为复杂。
并联机构的工作空间方法通常需要进行大量的计算和仿真,对于设计人员的理论水平和计算能力要求较高。
并联机构的工作空间方法在实际应用中也存在一定的误差和不确定性,这对于机构的设计和优化也带来了一定的挑战。
针对并联机构工作空间方法的分析,我们需要充分发挥其重要性和优点,同时也要意识到其局限性,以便更好地应用和发展这一方法。
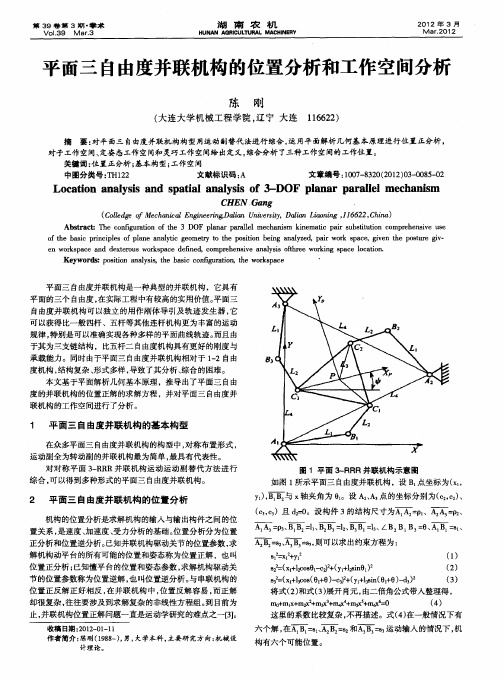
平面三自由度并联机构的位置分析和工作空间分析
珥
s _ = , = s则可以 、 , 求出 约束方程为:
S2 l =X s2 2=
_
l
21 +。 y
.
() 1
() 2
x+ 2o O — O+ y 1iO) 1 1 s l e 2(l 2n 1 c +s
sZ s=
_
x lo( 10一 3+ y li( 1O 一 3 1 s s0+ )c (l 3n O+ )d) +c ) +s
规律 , 特别是可 以准确实现各种多样 的平面曲线轨迹。 而且 由
于其为三支链 结构 ,比五杆二 自由度机构具有更好 的刚度 与 承载能力 。同时由于平 面三 自由度并联机构相对于 1 2自由 - 度机构 , 结构复杂 、 形式 多样 , 导致了其分析、 综合 的困难 。 本文基 于平面解析几何基本原理 ,推导 出了平面三 自由 度 的并联 机构的位 置正解 的求解方程 ,并对平面三 自由度并
机构 的位置分析是求解机构的输入与输出构件之间 的位 置关 系 , 是速度 、 加速度 、 力分析的基础 。 受 位置分析分为位置 正分析和位置逆分析 。 已知并联 机构 驱动关节 的位 置参 数 , 求 解机构动平 台的所有可能 的位置和姿态称为位置正解 ,也 叫 位置正分析 ; 已知懂平 台的位置 和姿态参数 , 求解机构驱动关 节 的位置参数称为位置逆解 , 叫位 置逆分析 。 串联机构 的 也 与 位置正反解 正好相反 , 在并联机 构 中, 位置反解容 易 , 而正解 却很复杂 , 往要 涉及 到求 解复杂的非线性方程组 。 目前为 往 到 止, 并联 机构位置正解 问题一直是运动学研究 的难点之- [] - 3。
Ke wo d :p st n a ay i, h a i o g r t n h o k p c y r s o i o n ss t e b s c n u ai ,te w r s a e i l c f i o
3-SPR并联机构的工作空间分析

0引言与串联机构相比,并联机构具有更高的推重比、结构刚度、控制精度和更低的惯性等优点,因此得到了更广泛的关注[1,2]。
并联机构的工作空间是指并联机构末端执行器的工作范围,工作空间是并联机构性能的重要指标,因此它的研究尤为重要。
并联机构的机构紧凑,因而工作空间范围比较小,所以并联机构工作空间的研究相对于串联机构来说难度较大,研究并联机构工作空间的方法很多,运用最广泛的是数值法和解析法。
在数值法研究方面,主要有Tocobi法、网格法、优化法和蒙特卡洛法,这几种方法都需要固定末端执行器姿态,在利用位置反解方可求出机构的工作空间,因而这几种方法的求解效率和精度较低。
最具代表性的是Fichter研究了6自由度并联机构的工作空间[3],利用的是并联机构的位置反解方程,固定3个位姿参数和一个位置参数,而让其他两个参数变换的方法。
在解析法方面最具代表性的是几何法,利用几何法求解并联机构的工作空间是最精确的,因为几何法是要求出并联机构工作空间的边界曲线,因此几何法工作量相对而言较为复杂烦琐。
1990年Gosselin利用几何法推导出了6-SPS并联机构工作空间的边界曲线[4]。
除以上几种分析方法外,还有许多学者利用软件对并联机构的工作空间进行分析,其中MATLAB中的SimMechanics模块就提供了分析工作空间的平台。
SimMechanics是MATLAB中的一个软件包,可以对很多机构进行建模和仿真[5,6],王国明等就利用SimMechanics模块对二自由度串联机构进行系统的建模和仿真[7]。
然而复杂的并联机构在利用SimMechanics建立模块并设置参数时容易出错。
Solidworks具有强大的实体建模能力,所以通过Solidworks与MATLAB相连接,在Solidworks 中建模,并将模型导入MATLAB中,MATLAB会自动生成模型和各个构件的数据,这样就能更有效更快捷的建立SimMechanics模型[8]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
并联机构工作空间方法的分析
作者:刘小娟
来源:《山东工业技术》2019年第23期
摘要:引入并联机构的定义以及其具有的优点。
相对串联机构,并联机构刚性好,具有高的稳定性;惯性较小、动态响应好、累积误差小等特点成为学者的研究热点。
并联机构的工作空间是机构性能的重要指标。
文中总结并联机构工作空间求解的方法以及各种方法的特点及区别,为并联机构的应用和研究提供理论意义和实用价值。
关键词:并联机构;工作空间;求解方法
DOI:10.16640/ki.37-1222/t.2019.23.007
并联机构是机械、电子及计算机控制相结合的产物,是机器人学的一个重要分支。
并联机构的定义:由2个或2个以上的独立运动链连接动平台和静平台,通过并联方式驱动的闭环系统。
与串联机构相比,并联机构具有的优点:闭环支链结构刚度大,稳定性较好;运动惯性小、动态响应快、累积误差小、精度较高等;其中对于完全对称的并联机构具有较好的各向同性,可以避开机构的奇异点等,使得并联机构得到广泛的应用及发展[1]。
最早并联机构由学者Stewart提出的6自由度Stewart平台机构,该机构具有输出精度高,承载能力强以及易于控制,将其应用在飞行三维空间模拟器中。
由学者Fichter和Sugimoto将此平台用于操作器和力矩传感器。
并联机构中包含一类自由度小于6称少自由度并联机构,为并联机构中的重要分支[2]。
相对于6自由度并联机构,少自由度并联机构具有结构简单、造价低,易于控制优点。
Hunt 提出一种3自由度并联平台机构,该并联机构动平台末端输出为2个转动自由度和1个移动自由度。
Gosselin提出了平面和球面3自由度机器人。
黄真和赵铁石综合出一种4-URU对称4自由度并联机构,可以实现3个移动自由度和1个转动自由度。
少自由度并联机构适合应用在模块化可重组制造系统中。
可用来构造串、并联机构、微动机构特殊用途机器人,从而进一步促进并联机构的实用性。
1 并联机构工作空间的定义及分类
并联机构的工作空间定义[3]为:当给并联机构的驱动构件输入驱动时,动平台输出末端的参考点的所有运动区域,也即为此并联机构的工作空间。
机构工作空间的大小、形状是否规则以及边界是否规整,决定并联机构的工作性能。
同时也决定着机构的整体尺寸的大小。
根据动平台末端的输出位姿情况,可将工作空间[4]具体细分为:(1)可达的工作空间;(2)定姿态的工作空间;(3)灵活工作空间。
其中并联机构的可达工作空间是指动平台末端参考点所能到达的范围;灵活工作空间是指机构输出参考点可以通过任意的一种姿态所到的全
部点集合,即为动平台末端输出能绕某一点可以整周回转,机构的此部分工作空间是可达工作空间的一部分区域,由于并联机构杆件间的组成特征,使得并联机构一般不能实现绕某点作整周回转,即在一般的情况下并联机构不会出现灵活工作空间;定姿态工作空间为在已知规定的末端姿态下,得到对应的末端输出运动的集合。
2 并联机构工作空间的求解方法及特点
由上述的定义知,并联机构的组成结构不是开环系统,为闭环系统具有耦合性的特点,使得工作空间的求解相比串联机构较困难。
与串联机构相比,并联机构的工作空间较小。
并联机构工作空间的大小和形状随着机构的结构参数变化而变化。
包括动平台的半径大小、各支链杆的极限长度、各支链杆的等效直径大小、平台铰链分布角以及球铰或虎克铰极限摆角等对工作空间的影响程度是不相同的。
对于并联机构工作空间的求解基于机构位置解的情况。
针对并联机构的工作空间求解采用方法有:离散求解法;几何求解法;数值求解法。
离散求解法是指将预先估计工作空间,进行划分网格,通过机构的位置反解验证网格上的点,若点满足机构所有的约束条件,该点在并联机构的工作空间中,满足条件的所有点即该并联机构的工作空间。
用此方法求解可对机构所有的约束条件进行分析,该方法的不足之处:根据网格划分的大小,该方法取点将存在一定的误差(部分机构存在奇异性),则影响工作空间求解的精度。
工作空间求解的几何法是通过数值极限理论,求解满足所有约束条件的交集部分。
此求解方法是通过求解的逆解和参数约束,求得工作空间的边界。
采用该方法该较复杂,难度较大目前没有较完善的方法。
数值法是通过位置反解和约束条件,求解得到机构工作空间的边界曲面。
该方法分析主要影响因素:转动副或球面副连接杆件的转动角度、由移动副连接杆件的滑动长度的约束以及杆件的干涉约束条件,基于上述的影响因素采用高数微积分的计算复杂不规则工作空间的体积,该方法与实际相符程度较高。
对于空间的并联机构采用数值搜索法通过坐标转化成球坐标,将求解的区域分解成几个子空间,分析每一个子空间的边界值,该方法较简单且精度高。
通过数值法得工作空间的三维图和对于某一个截面上的边界图,进行具体分析机构参数对并联机构工作空间大小和分布的影响情况,可进一步为该并联机构的尺寸优化以及该并联机构的实际应用提供依据。
3 结语
并联机构有广泛的应用领域且具有良好的发展前景,成为国内外学者研究的热点问题,其在工业中的应用加快了自动化的进程,同时体现了现代科技技术的高速发展。
目前国际机器人界都在加大科研力度,对并联机构进行全面系统的研究,把它更深入地推向实际应用中,在各个领域充分地发挥其作用,并朝着智能化和多样化方向发展,本文分析并联机构工作空间的定义和主要的方法以及影响工作空间的主要因素,对并联机构的研究有重要的理论意义和实用价值。
参考文献:
[1]黄真.并联机器人机构学理论及控制[M].北京:机械工业出版社,1997.
[2]石曉宇.少自由度并联机构研究综述[J].煤矿机械,2011,32(10):13-14.
[3]叶冬明,李开明.新型三自由度并联机构工作空间分析[J].机械设计与制造,2012(02):199-201.
[4]张俊辕,马春生,李瑞琴,汪辉.2-RPU/UPR并联机构的自由度与工作空间分析[J].包装工程,2018,39(23):138-142.
作者简介:刘小娟(1989-),女,山西忻州人,硕士研究生,助教,研究方向:机构动态设计与优化。