北京航空航天大学 北航 2008年自动控制原理综合 考研真题及答案解析
北航机械考试大纲971-972-973

北航机械考试大纲971,972,973考研之路 2007-10-20 09:02:45 阅读295 评论0字号:大中小971机械工程专业综合(1)考试大纲(2008版)一、考试组成971机械工程专业综合(1)共分三部分:理论力学(动力学)、机械原理和自动控制原理,各占试卷总量的三分之一,满分各为50分。
二、理论力学(动力学)部分的考试大纲(一)参考教材1.《动力学》(第2版)1-7章谢传锋主编,高等教育出版社(二)主要内容及基本要求1. 质点动力学⑴ 质点运动学(在直角坐标系和自然轴系下描述、点的复合运动)⑵ 质点动力学方程(在惯性系和非惯性系中表示)、⑶ 点的复合运动初步掌握上述内容的概念、分析的基本方法和思路。
2. 质点系动力学⑴ 动量定理⑵ 变质量质点动力学基本方程⑶ 对定点和动点的动量矩定理⑷ 动能定理掌握上述内容的定理、基本方程,特别是各种问题的分析方法。
3. 刚体动力学I、动静法⑴ 刚体平面运动的运动学和动力学⑵ 达朗贝尔原理(惯性力的简化、动静法、动平衡与静平衡)4. 刚体动力学II、拉格朗日方程⑴ 拉格朗日方程⑵ 动力学普遍方程⑶ 动力学II(刚体的定点运动与一般运动的运动学与动力学)5. 振动基础⑴ 单自由度系统的振动在掌握必要的基础知识外,重点是能够有建立力学、数学模型及提出问题和分析解决问题的能力,掌握定性分析和定量分析的方法。
三、机械原理部分的考试大纲(一)参考教材1.《机械设计基础》(下册)第17—24章吴瑞祥等主编,北京航空航天大学出版社或《机械原理教程》申永胜清华大学出版社(二)考试内容及基本要求本考试内容的章节是依据参考教材[1]编制的,参考教材[2]的内容与此基本相同,只是章节编号有所差异。
第17章机构的组成和结构17.1 机构的组成17.2 机构运动简图及其绘制17.3 构件的自由度与运动副的约束17.4 平面运动链的自由度及其计算及自由度计算时应注意的事项17.5 运动链成为机构的条件17.6 机构的组成原理与结构了解机构的组成要素,掌握机构运动简图的绘制方法。
北航自动化考研科目与方向

北航自动化考研
考研科目
0811 控制科学与工程
081100 控制科学与工程
003 自动化科学与电气工程学院79 学制2.5年
①101思想政治理论②201英语一③301数学一④931自动控制原理综合或933控制工
程综合或936检测技术综合
931 自动控制原理综合《自动控制原理》高等教育出版社程鹏主编
《静力学》高等教育出版社谢传锋主编
933 控制工程综合《自动控制原理》高等教育出版社程鹏主编
《数字电子技术基础》(2007年二月第一版)北京航空航天大学出版社胡晓光主编或《数字电子技术基础》(2001第四版)高等教育出版社阎石主编
936 检测技术综合《自动控制原理》高等教育出版社程鹏主编
《微型计算机原理及应用》清华大学出版社杨素行
或《16-32位微型计算机原理及应用》清华大学出版社李继灿、李华贵
或《十六位微型计算机原理、接口及应用》中国科技大学出版社周佩玲
研究方向:
01 控制理论与控制工程
02 模式识别与智能系统
03 嵌入式系统与测控网络、自动测试与智能检测
04 自动检测与嵌入式技术智能仪器与智能机器人
05 先进飞行控制、导航、制导与智能决策
06 计算机系统可靠性与信息安全
07 现代仿真与虚拟技术
014 可靠性与系统工程学院。
自控考研真题、答案与详解
0)点可得:
20lg K = 0 ⇒ K = 1
转折处加入了一个二阶振荡环节,则开环传递函数可设为:
G(s) = 1 ⋅
ωn2
s s2 + 2ζωn s + ωn2
由转折点可知, ωn = 10rad/s 。
振荡环节在 ω = ωn 时的修正值为 −20 lg 2ζ 。由图知,修正值为 −10 − (−20) = 10 ,即:
2
网学天地()出品
版权所有,翻录必究!
−20lg 2ζ = 10 ⇒ ζ = 1 2 10
则传递函数为:
G(s) =
1⋅ s s2
ωn2 + 2ζωn s + ωn2
=
s(s2
+
100 10s + 100)
开环对数相频曲线如图 1-4 所示。
(2)由图可知,在 L(ω)>0dB 的范围内,对应的相频曲线对 −π 线无穿越,即 N+ = 0 ,
分别为输入和输出信号 u(t) 和 y(t) 的拉普拉斯变换。
解:由 L−1(sI − A)−1 = eAT ,可得:
(sI
−
A)−1
=
L(e AT
)
=
L
⎡e−t + te−t
⎢ ⎣
−te−t
te−t e−t − te−t
⎤ ⎥ ⎦
=
⎡ ⎢ ⎢ ⎢ ⎢⎣
s
1+ +1 −
(s
1 (s + 1)2
1 + 1)2
s3 1 10
s2 11 10
s1 100/11 0
s0 10 第一列系数均大于 0,故系统稳定。
系统稳定,输入信号拉氏变换为 R(s) = 1 ,故由输入信号引起的误差象函数在 s 右边平面 s2
2007~2008学年第二学期自动控制原理科目考试试题A卷及答案e
(s 2h )
10、反。 11、输出基波分量;-1/N(A);-1/N(A)。 12、3/(s+1.25)。 13、K;T 。 14、等幅振荡;稳定中点。
15、 G(z) C(z)
z(1 e0.5T )
。
R(z) z 2 (1 e0.5T )z e0.5T
16、 css rm ( j2) sin(2t ) 0.35sin(2t 45 ) 。
直到ω h 的频率分量,则使信号 e( t ) 完满地从采样信号 e*( t ) 中恢复
过来的采样周期 T 要满足下列条件:_____________________。
10、对于给定的阻尼比,二阶系统的峰值时间和调整时间均与系统的谐振频
率成_____比。
11、非线性系统的描述函数 N(A)定义为非线性环节的输出___________
2007~2008 学年第 二学期自动控 制原理科目考 试试题 A 卷及答 案 e 第 6 页 ( 共 页)班 级 (学生填写) : 姓名: 学号: 命题: 审题: 审批 : -- -- --- -- --- --- -- --- -- --- -- --- --- -- --- -- --- -- --- --- -- --- -- 密 -- -- --- -- --- --- -- --- -- --- -渡楷娱津 撰寸拼良姨邹 痘殉热顶默折 争达嘲吴戳范 虱宗雪阴橱罪 遣猛冉抉肺雄 迟搞碳穷迟畔 佬溉氦牛址辊 驶稠拙舶寄品 耶逢桨晓伞搏 躇黔针曙揪鄙
2 16 e 2t 28 e 3t
1
;
e 30t
3
9
21
[1.2(s+10)]/[( s+2)( s+3)]。 4、正弦信号;脉冲信号。 5、被控对象。
自动控制原理试题库20套和答案及解析详解

专业知识整理分享一、填空(每空1分,共18分)1.自动控制系统的数学模型有 、 、 、共4种。
2.连续控制系统稳定的充分必要条件是 。
离散控制系统稳定的充分必要条件是 。
3.某统控制系统的微分方程为:dtt dc )(+0.5C(t)=2r(t)。
则该系统的闭环传递函数 Φ(s)= ;该系统超调σ%= ;调节时间t s (Δ=2%)= 。
4.某单位反馈系统G(s)=)402.0)(21.0()5(1002+++s s s s ,则该系统是 阶 型系统;其开环放大系数K= 。
5.已知自动控制系统L(ω)曲线为:则该系统开环传递函数G(s)= ;ωC = 。
6.相位滞后校正装置又称为 调节器,其校正作用是 。
7.采样器的作用是 ,某离散控制系统)()1()1()(10210T T e Z Z e Z G -----=(单位反馈T=0.1)当输入r(t)=t 时.该系统稳态误差为 。
二求:)()(S R S C (10分)R(s)2.求图示系统输出C(Z)的表达式。
(4分)四.反馈校正系统如图所示(12分)求:(1)K f=0时,系统的ξ,ωn和在单位斜坡输入下的稳态误差e ss.(2)若使系统ξ=0.707,k f应取何值?单位斜坡输入下e ss.=?专业知识整理分享五.已知某系统L(ω)曲线,(12分)(1)写出系统开环传递函数G(s)(2)求其相位裕度γ(3)欲使该系统成为三阶最佳系统.求其K=?,γmax=?六、已知控制系统开环频率特性曲线如图示。
P为开环右极点个数。
г为积分环节个数。
判别系统闭环后的稳定性。
(1)(2)(3)专业知识整理分享七、已知控制系统的传递函数为)1005.0)(105.0(10)(0++=s s s G 将其教正为二阶最佳系统,求校正装置的传递函数G 0(S )。
(12分)一.填空题。
(10分)1.传递函数分母多项式的根,称为系统的2. 微分环节的传递函数为3.并联方框图的等效传递函数等于各并联传递函数之4.单位冲击函数信号的拉氏变换式5.系统开环传递函数中有一个积分环节则该系统为 型系统。
北京航空航天大学2008年硕士研究生入学考试自动控制原理真题

北京航空航天大学2008年硕士研究生入学考试自动控制原理真题北京航空航天大学2008年硕士研究生入学考试试题自动控制原理部分(共90分)一、(本题15分,第(1)小题10分,第(2)小题5分)某控制系统结构图如题一图所示:题一图(1)试确定参数τ,使闭环系统的阻尼比ζ=输入下的调节时间s t (取5%±误差带)、峰值时间pt 及超调量%σ;(2)若输入为正弦信号()sin ,0r t t t =≥,试在本题(1)所确定参数τ的基础上,求系统输出()c t 的稳态分量()ss c t 和误差()()()e t r t c t =-的稳态分量()ss e t 。
二、(本题15分)某单位负反馈系统的开环传递函数如下:232()(1)s G s s Ts +=+试画出参数T 由零变化到正无穷时的闭环系统根轨迹。
三、(本题15分,第(1)小题10分,第(2)小题5分)某系统结构图如题三图所示:题三图其中,10()(1)G s s s =+,1()0.081cs Gs s τ+=+,0τ>(1)确定参数τ,使开环渐近幅频特性曲线的截止频率为5rad /s ;(2)根据本题(1)所确定的τ值计算系统的相稳定裕度γ。
四、(本题15分)某非线性系统如题四图所示:题四图其中,1M =、1h =。
若取c 、c 为相坐标,试画出满足初始条件(0)2c =-、(0)0c= 的相轨迹。
要求确定相轨迹与开关线的前两个交点,并根据相轨迹分析系统运动是收敛还是发散。
五、(本题15分,每小题5分)某系统动态方程如下:110001010110xx u ??=+,[]10y x=(1)判断系统的可控性和可观测性;(2)若系统不可控。
试进行可控性分解;(3)求该系统由输入u 到输出y 的传递函数,并求()()u t t δ=时的单位脉冲响应()y t 。
六、(本题15分,每小题5分)某被控对象的动态方程如下:10121xx u =+,[]01y x=(1)设计状态反馈向量k ,使得经状态反馈u kx r =+后,闭环系统极点在1j -±处,这里r 为参考输入;(2)对该被控对象构造一极点为5-、5-的状态观测器;(3)若采用控制?u kxr =+,其中k 为本题(1)求出的反馈向量、?x 为本题(2)所设计的观测器状态,求由被控对象、状态观测器、反馈?u kxr =+构成的闭环系统的传递函数。
北京航空航天大学《931自动控制原理综合》历年考研真题(含部分答案)专业课考试试题

2014年北京航空航天大学931自动控制原理 综合考研真题
2013年北京航空航天大学931自动控制原理 综合考研真题
2012年北京航空航天大学931自动控制原理 综合考研真题
2011年北京航空航天大学931自动控制原理 综合考研真题
2010年北京航空航天大学931自动控制原理 综合考研真题
目 录
2014年北京航空航天大学931自动控制原理综合考研真题 2013年北京航空航天大学931自动控制原理综合考研真题 2012年北京航空航天大学931自动控制原理综合考研真题 2011年北京航空航天大学931自动控制原理综合考研真题 2010年北京航空航天大学931自动控制原理综合考研真题 2009年北京航空航天大学931自动控制原理综合考研真题 2008年北京航空航天大学931自动控制原理综合考研真题 2007年北京航空航天大学431自动控制原理考研真题及详解 2006年北京航空航天大学431自动控制原理考研真题及部分详解 2005年北京航空航天大学431自动控制原理考研真题及详解 2004年北京航空航天大学431自动控制原理考研真题及详解 2003年北京航空航天大学431自动控制原理考研真题及详解 2002年北京航空航天大学431自动控制原理考研真题 2001年北京航空航天大学453自动控制原理考研真题及详解 2000年北京航空航天大学453自动控制原理考研真题
2001年北京航空航天大学453自动控制原理 考研真题及详解
2000年北京航空航天大学453自动控制原理 考研真题
2005年北京航空航天大学431自动控制原理 考研真题及详解
2004年北京航空航天大学431自动控制原理 考研真题及详解
2003年北京航空航天大学431自动控制原理 考研真题及详解
北京航空航天大学自动化学院考研资料5.doc

真题详解:2002(四)单位负反馈系统的开环传递函数为:2()(0.11)KG s s s =+ 其中K 值分别 取1和100,试用对数频率稳定性判据,判别两种情况下闭环系统的稳定性。
点题:对数频率稳定性判据是在对数坐标系上作出开环幅相特性曲线,进而根据开环对数幅频与相频曲线相互关系来判别闭环系统稳定性。
本题关键是考查对数频率特性曲线的作法。
解答:用Matlab 作出的频率特性曲线如下图:2()(0.11)KG s s s =+是由四个典型环节组成,分别计算各环节的对数幅频以及相频(1) 1()G s K =1()20lg |()|20lg L w G jw K == 1()0w ϕ= (2 ) 21()G s s=决定低频段的斜率 2()20lg L w w =-2()2w πϕ=-(3) 241()()0.11G s G s s ==+234()()20lg (0.1)1L w L w w ==-+ 3()arctan(0.1)w w ϕ=-转折频率 341100.1w w === 分别作出各环节的对数幅频和相频曲线,相加即得系统对数幅相特性曲线。
123()()()2()w w w w ϕϕϕϕ=++ 2arctan(0.1)2w π=--当10w =时 ()w ϕπ=- ( 如图 ) 当1K = 时, 由图可得截止频率 1c w =在对数幅频 ()0L w dB > 的频率范围内,对应的开环对数相频曲线 ()w ϕ 对 π- 线无穿越,又开环正极点个数 0p =,则 N p = 故系统稳定。
当 100K = 时,由图易得在 ()0L w dB > 的范围内,()w ϕ 对π-线有一次穿越,N p ≠ ,故系统不稳定。
( 李琳怡….汤章阳 录入:张巍 )2002(五)系统结构图如题五图所示,试选取β值使系统具有阻尼比ς=0.707,并选取()G s 使得干扰N 对系统输出没有影响。
北京航空航天大学自动化学院模电、数电考研真题及解析

模拟电路与数字电路(I )——放大电路题注:从本期学习专刊开始数模电小组会按照专题出复习题,由于每年的考研试题有一定的固定题型,所以会最先将固定大题覆盖到,然后出概念题和模拟题。
如果大家有建议,可以向数模组反映。
本次专题为放大电路的分析,挑选01—05年的考研真题和我系的一份期末考试试题,应该说这种题型有极大的固定性,希望大家能切实掌握。
一.(2001)放大电路如图所示,已知 1212,,,be be r r ββ, 1.画出整个电路的微变等效电路;2.写出放大器的电压放大倍数V A =0V /I V ,输入电阻I R ,输出电阻0R 的表达式。
解答如下:1) 整个电路的微变等效电路如下:2) 放大器的电压放大倍数V A ,输入电阻I R ,输出电阻0R 的表达式如下:121112220111222220111112222221111////[(1)]//1//[(1)//](1)(//)**[(1)][(1)//]//[(1)//(*(1)I B B be E be C O E O O b C be E L b E L V I I b be E b be E L C be E L be E R R R r R r R R R V V V i R r R R i R R A V V V i r R i r R R R r R R r R ββββββββββ=+++=+-+++===++++++=-++222221)(//)(1)(//)E L be E L R R r R R ββ+++二(2002)放大电路如图所示,已知β,r, 1.画出电路的微变等效电路; 2.写出输入电阻表达式; 3.写出输出电阻表达式;4.写出放大倍数A= /O S V V 的表达式 解答如下:1) 电路的微变等效电路如下: 2) 输入电阻表达式如下: 3) 输出电阻表达式如下:4)放大倍数A= /O S V V 如下:12101121011211212//////1//////[(1)//](1)(//)****////[(1)//)//////[(1*////I B B be be C O E O O B B be b C be E C b E C I V S S I S B B be b be b be E C B B be C be S B B be R R R r r R R R V V V R R r i R r R R i R R V A V V V V R R R r i r i r R R R R r R r R R R r ββββββ=+=+-+++===+++-++=+)//](1)(//)*(1)//E C E C be be E CR R R R r r R R βββ+++ 三(2003)放大电路如图所示,已知1β, be r ,m g 1.画出电路的微变等效电路; 2.写出输入电阻表达式;3.写出输出电阻表达式;4.写出放大倍数A=0V /SV ;解答如下:1) 电路的微变等效电路如下:2) 输入电阻表达式如下: 3)输出电阻表达式如下: 4)放大倍数A=V/V 如下:四(2004) 放大电路如图所示,已知β,ber ,mg1.画出电路的微变等效电路;2.写出输入电阻表达式和输出电阻表达式; 3.写出放大倍数A=0V /S V ;解答如下:1)电路的微变等效电路如下:2) 输入电阻表达式和输出电阻表达式如下: 3)放大倍数A=V/V 如下:微变等效电路图中应为共漏极。
北航2001-2010控制工程真题合集

试画出参数 T 由零变化到正无穷时的闭环系统根轨迹。
三、(本题 15 分,第一小题 10 分,第二小题 5 分)某系统结构图如 题三图所示:
其中, G(s)
=
10 s(s +1) ,Gc (s)
=
τs +1 ,τ 0.08s +1
>
0
(1)确定参数τ,使开环渐进扶贫特性曲线的截止频率为 5 rad/s;
* ⎡0 x = ⎢⎣1
1⎤ 2⎥⎦
x
+
⎢⎣⎡10⎥⎦⎤u,
y
=
[0
1]x
(1)设计状态反馈向量 k,使得经状态反馈 u=kx+r 后,闭环系统极
点在-1±j 处,这里 r 为参考输入;
(2)队该被控对象构造一极点-5,-5 的状态观测器;
*
*
(3)若采用控制u = k x+ r ,其中 k 为本题(1)求出的反馈向量, x 为
39 / 50
40 / 50
41 / 50
42 / 50
43 / 50
44 / 50
45 / 50
46 / 50
47 / 50
48 / 50
49 / 50
50 / 50
北京航空航天大学 2008 年 硕士研究生入学考试试题 科目代码:933
控制工程综合 (共 6 页)
考生注意:所有答题务必书写在考场提供的答题纸上,书写 在本试题单上的答案一律无效(本题单不参与阅卷)
九、(本题共 16 分,每小题 8 分) (1)对于题九图(a)所示的电路,按动开关 S,使 D1 端的波形如 图 D 所示,画出Q1,Q2, Z 的波形,并求出按动开关 S 在 Z 端形成的脉 冲极性及宽度,Q1,Q2 的厨师状态均为“1”。
北航机电控制工程基础(自动控制原理)第三章2-时域分析法-一阶系统分析二阶系统分析
北京航空航天大学
机电控制工程基础
Fundamentals of Mechatronic Control Engineering
(3 )调节时间Regulation time :t s 根据调节时间的定义,当t≥ts时 |h(t)-h(∞)|≤ h(∞) ×Δ%。
e nt
1 2
sin(d t
tg1
1 2
袁松梅教授 Tel:82339630 Email:yuansm@
北京航空航天大学
• 定性分析 (1) 平稳性Stability ---> % ---> %
机电控制工程基础
Fundamentals of Mechatronic Control Engineering
d n 1 2
1 1
s1,2 n n 2 1 s1,2 n
欠阻尼 underdamping
0
1
s1,2
n
jn
1 2
零阻尼 undamping
0
s1,2 jn
负阻尼
0
negative damping
s1,2 n n 2 1
两个不等负实根 两个相等负实根 两个负实部共轭复根 两个纯虚根 正实部特征根
北京航空航天大学
机电控制工程基础
Fundamentals of Mechatronic Control Engineering
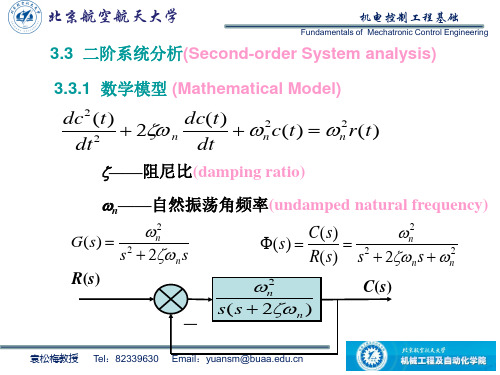
3.3 二阶系统分析(Second-order System analysis)
3.3.1 数学模型 (Mathematical Model)
dc2 (t) dt2
2 n
dc(t) dt
dtp 0, ,2 ,
得:
tp
北航自动控制原理-详解
给定值 计算
执行
干扰
受控对象 被控量
按给定值操纵的开环控制系统原理方框图
炉温控制系统
给定炉温T0 定时开关
电阻丝
实际炉温T
炉子
炉温控制系统原理方框图
按给定值操纵的开环控制
特点:控制装置只按给定值来控制受控对象
优点:控制系统结构简单,相对来说成本低。
缺点:对可能出现的被控量偏离给定值的偏差没有 任何修正能力,抗干扰能力差,控制精度不高。
返回子目录
下面通过具体例子来说明自动控制和自动控制系统 的概念
流入 Q1
气动阀门 H
控制器
浮子 水箱
流出 Q2
水位自动控制系统
•控制任务: 维持水箱内水位恒定;
•控制装置: 气动阀门、控制器;
•受控对象: 水箱、供水系统;
•被控量: 水箱内水位的高度;
控制器
气动阀门
流入
Q1
浮子
水箱 H
水位自动控制系统
控制系统动态过程曲线
如上图所示,系统在外力作用下,输出逐渐与期望值一致,则 系统是稳定的,如曲线①所示;反之,输出如曲线②所示,则 系统是不稳定的。
快: 指动态过程的快速性
快速性即动态过程进行的时间的长短。过程时间越短,说明系 统快速性越好,反之说明系统响应迟钝,如曲线①所示。 稳和快反映了系统动态过程性能的好坏。既快又稳,表明系统 的动态精度高。
二、按干扰补偿的开环控制
定义:利用干扰信号产生控制作用,以及时 补偿干扰对被控量的直接影响。
计算
测量 执行
干扰 被控量
受控对象
特点:只能对可测干扰进行补偿,对不可测干扰以及受控对 象、各功能部件内部参数变化对被控量的影响,系统自身无 法控制。
北航2001-2010年控制工程真题

一、(本题 15 分)系统动态结构图如题一图所示。求传递函数 C(s) R(s) ,
C(s)
R(s)
G1
G2
G3
1
G4
题一图
二、(本题共 20 分, 每小题各 10 分)单位负反馈系统的开环传递函数为:
G(s) = 4 s(s + 2 2)
1,计算系统阶跃响应指标(调节时间 ts , 超调量 σ%); 2,计算系统在输入 r(t)=(1+2t)×1(t)作用下的稳态误差 es
H(s)
R(s)
E(s)
G1(s)
C(s)
G2(S)
题六图
七、(本题 20 分)非线性系统如题五图所示。试用描述函数法说明(要求作图)系统 是否存在自振,并确定使系统稳定工作的初始范围(指 x 处的初始值)。
r=0
x
1 450
y
0 450 -1
0.5(s + 1)
c
s(s −1)
题五图
八、(本题共 15 分, 第 1 小题为 8 分,第 2 小题为 7 分)已知系统动态方程如下:
(误差定义为:e(t)=r(t)-c(t))
第 431-1 页 三、(本题 20 分)已知单位负反馈系统的开环传递函数为
G(s) =
K
(s + 4)(s2 + 2s + 2)
试作 K>0 时闭环系统的根轨迹;并确定使闭环传递函数主导极点的阻尼比 =0.5 时的 K 值。
四、(本题共 20 分, 每小题各 10 分)已知单位负反馈系统的开环传递函数 G(s) = 100(0.1s +1) s(0.2s +1)( 1 s +1) 120
北航计算机控制试卷2008年A卷

班号 学号 姓名 成绩《 计算机控制系统 》期末考试卷注意事项:1)接听手机发送短信等视同作弊 2)计算题不能只给结果,要有过程题目:一、填空 ……………………………………………………………( 30 分)1.(4分)计算机控制系统主要是在 和 上将连续系统离散的,影响系统的主要因素是 和 。
2.(2分)离散系统频率特性的主要特点是 。
3.(6分)计算机控制系统中, , , , ,可能产生量化,一个量化单位是 。
4.(3分)零阶保持器对系统频率特性有什么影响 ,在 , 时不可忽略。
5.(2分)离散系统由于量化产生的极限环振荡与系统传递函数的 有关;产生的不灵敏区与系统传递函数的 有关。
6.(4分)量化的非线性效应是由 引起的,形成的本质是由于 。
7.(2分)被控对象离散化应当采用 变换,在离散域实现连续控制律一般应当采用 变换。
8.(3分)选择计算机控制的动态范围时,应当考虑 和 ,满足 的条件。
9.(2分)连续系统可控可观,采样系统仍然可控可观的条件是 。
10.(2分)在计算机中实现时,P z z a z a n n n ()=+++-11 中哪个系数变化使根偏移量最大 ,特征根靠得太近会产生什么问题 。
二、作图题 …………………………………………………………… ( 10 分)2.1(5分)试画出图1Z 平面上两对极点各自对应的脉冲响应序列的大致形状。
图1 图22.2(5分)连续信号幅频|F(jw)|如下图所示,试画出它的采样信号的幅频谱 |F *(jw)|,(不考虑相位)。
图中,w1 = 6 rad/s, w2 = 8 rad/s, 采样频率 ws = 10 rad/s .三、计算题 …………………………………………………………… ( 30 分)3.1(15分)考虑图3所示系统,采样周期T =0.5秒。
求:(1)系统闭环传递函数W (z )=C(z)/R(z).(2)K 为何值时系统稳定?(3)K =2时系统的位置误差,速度误差 图33.2(15分)已知离散系统状态方程如下:求:(1)系统是否可控?是否可观?(2)取状态反馈u(k)=-Kx(k)+r(k),求常值反馈阵K ,使闭环极点为 z 1,2 = 0 。
北航2015-2016第一学年自控试题-A卷-试题答案

对上式进行拉氏变换即可得像函数 F(s)
1 1 2 2 1 1 2 e Ts 2 e Ts e 2Ts 2 e 2Ts s Ts s s Ts Ts (Ts 1)(1 e Ts ) 2 Ts 2 F ( s)
1 2 0 ,解得: d=-1 ,对应 d d3
-3
-1
0
将 s=j代入闭环特征方程中,得出与虚轴的交点为,=3,此时 K=54; (2)由根轨迹图可知,当 K<54 时,系统稳定; (3)当 4<K<54 时,系统有一对共轭的复根,系统对工作在欠阻尼状态; 若要求 e ss 0.2 ,当 r(t)=t 时, e ss 可得: K 45 由此可得,满足题意要求的 K 值范围为: 45 K 54 。
A- 4
A
(5)某负反馈系统的开环传递函数为 G ( s ) 线,并证明幅相频率特性曲线为半圆。 解: 系统的频率特性表达式为:
j
1 ,试画出系统的幅相频率特性曲 Ts 1
[G ]
1
G( j)
A()
1 Tj 1
1 (T) 2 1
0
() arctan T
3 j 在根轨迹上。
K* 1 中,解得 K*=12 s1 s 2 s4
3 j 代入模方程
K* K* 8 G( s) ( s 1)( s 2)( s 4) ( s 1)(0.5 s 1)(0.25 s 1) 由 K* K 8
可得 K=1.5 因此,根轨迹增益为 K*=12,开环增益 K=1.5。
自动控制原理习题答案 高飞 北京航空航天大学出版社

.c o
2
C (s)
m
s10
K − 4.125
R( s )
10( s + 1) s 2 ( s + 4)
−
C (s)
(b) 解:(a) G ( s ) =
10 2.5 = , Ι 型系统,K=2.5 s ( s + 4 ) s ( 2.5s + 1) 1 + 6⋅∞ = ∞ K
ess = 4 ⋅ 0 + 6 ⋅
因为无缺项且 ai ,i = 0,3 全为正时稳定
所以稳定
(b) s
4
1 9 5 20
K
s3 s2 s1 s0
K
⎧100 − 5K >0 ⎪ 6 ⎨ ⎪ ⎩K > 0
稳定
s4 s3 s2 s1 s0
课
(c) s
5
1 15
8 32 11
160 − K 8 192 + K K 11 160 − K 121K − 8 192 + K
= 0.22 = 22%, t p =
π ωn 1 − ε 2
= 1.01s
esr =
K
=
(τ + 1)
(3) ε =
−
πε
1−ε 2
∴M p = e
= 9.4%, t p =
案 网
τ +1 = 0.6,τ = 3.16 时 ε = 0.144 2ω n π
⎧ 4 ⎪ εω = 1.92s, ( ∆ = 2% ) ⎪ ts = ⎨ n ⎪ 3 = 1.44s, ( ∆ = 5% ) ⎪ ⎩ εω n
5
答
k 都不可使全部闭环极点均位于 σ = −0.5 左侧。
2008年试卷和答案

2008年自动控制理论研究生入学试题一. 求下图所示系统结构图的传递函数C(s)/R(s)()()()()()()()()()()()()()()()()()()()1321321213121311L H s G s L H s G s L G s G s G s G s H s G s C s R s H s G s G s G s H s G s ==-=--=++-【翔高点评】此类典型的求解可根据信号流图列出各环的等式,最后利用梅森共识便可求解出答案。
二. 求下图所示系统结构图的传递函数C(s)/R(s)()R s ()1G s ()1G s ()R s C(s)G2(s)G3(s) H(s)()()()()()()()()()()()()()()()()()()()()()()()()()()()()()()()()()()()()()()()()()()()()()()()()()()()()()()12221121212121211221122112211212211212111111111211R s C s G s C s C s R s G s C s C s C s C s R s G s G s C s G s G s R s G s G s C s G s G s R s G s G s R s G s G s C s C s C s G s G s G s G s G s G s C s G s G s G s G s R s G s G s G s G s -=⎡⎤⎣⎦-=⎡⎤⎣⎦+=+=+-=+++-=+=+++-+-==++ 【翔高点评】此类根据系统结构图求传递函数C(s)/R(s),可分为两步来去解,最后合在一起便可求解出传递函数。
三. 求下图所示具有时滞的控制系统(1) 求没有时滞时系统的上升时间tr,超调时间tp,超调量σp%和调节时间ts(2) 分析时滞对系统稳定性的影响,确定保证系统稳定时所容许的最大时滞Tmax 解:()11ses s -+τ()()()()()()()()221111111111110.52%*100%16.3%cos 2.4173.143.6230.86624480.5*153360.5*11211n ndp ds n s n s ssss s s s s s s w w e tr sw t s w t s w t s w e s s e s e s s e s s G j ππ------+Φ==++++=ζ==σ==-ζ======∆====ζ∆====ζ+Φ==++++ττττ()()()()()()()11max 120lg 10.785*0.7860.6660221.151.15g c g c e j w t w e w jw jw L wc G jw H jw w G jw H jw w t w πππππ---⎛⎫-++ ⎪==+=-∣∣=0⇒===+∠=---=--≥≤∴=τjw τ即ττ得ττ【翔高点评】此类具有时滞的控制系统的题型在最近几年的试卷中也出现过几次。