基于光电传感器的智能车控制系统设计
基于光电传感器智能车系统的设计

电源 管理 模块 将 车载输 入 主 电源 ( 7 . 2 V) 经多路 并联 的 D C—D C转换 后 , 为 主控 制 器 ( 5 V) , 舵 机
( 6 V ) , 光电传感器( 5 v ) , 电机驱动 ( 5 V ) 等模块供电。
2 光 电传 感 器 设 计
第3 3卷 第 1 期
湖北师范学 院学报 ( 自然科学版 )
J o u r n l a o f H u b e i N o r ma l U n i v e r s i t y( N a t u r a l S c i e n c e )
Vo 1 . 33 No .1. 201 3
基 于 光 电传 感 器 智 能 车 系统 的 设 计
叶梦君 , 胡长 晖 , 张先鹤 , 王小威 , 袁 亚军 , 吕高 强
( 湖 北师 范 学院 机 电与控 制 工程 学 院 , 湖北 黄 石 4 3 5 0 0 2 )
摘要 : 阐述 了光 电传 感 器 智 能 车 系统 传 感 器 的 选 择 、 布局和路 径信 号 的获取 、 处 理 方 法 。 智 能 车 的 速 度 控
d o i : 1 0 . 3 9 6 9 / j . i s s n . 1 0 0 9—2 7 1 4 2 0 1 3 . 0 L 0 0 2
0 引 言
传 感 技术 与控 制技 术相 结合 是构 成 智 能系统 的两大 支柱 , 已经被 广泛 的应 用 于各个 领域 , 具 有重
照射到黑色导航线 上, 红外光线未被反射 , 光敏三极管截至, 比较器输出高电平 , 实际测量值 3 . 4 V , 因 此, 光电传感器的输 出信号不需要经过 A D转换 , 直接可 以通过主控制器的通用 I / 0口读取。
基于光电传感器技术的智能车优化与改进
仪
表
第4 0卷
基 于 光 电传 感 器 技 术 的 智 能 车 优 化 与 改 进
王 田 农 鄢 志 丹 杨 念 振 周 岳 王 宇 红
( 中 国石 油 大 学 ( 华东 ) 信 息 与 控 制工 程 学 院 , 山东 青 岛 2 6 6 5 8 0 )
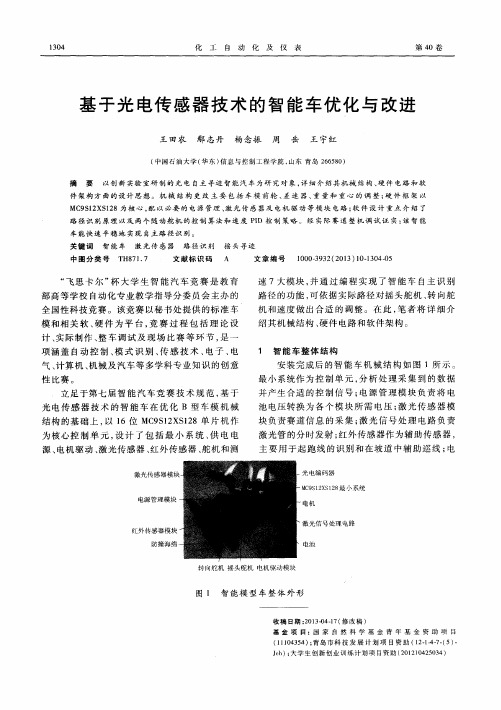
块 负责 赛道信 息 的采 集 ; 激光 信 号 处理 电路 负 责
激 光管 的分 时发射 ; 红外 传感器 作 为辅助传 感 器 ,
主 要用 于起 跑 线 的识别 和 在坡 道 中辅 助 巡线 ; 电
光 电编码 器
M C 9 S 1 2 X S 1 2 8 最小 系统
电机
激 光信 号处理 电路
J c h ) ; 大学 生 创 新 创 业 训 练计 划 项 目资 助 ( 2 0 1 2 1 0 4 2 5 0 3 4 )
第 l O期
王 田农 等 . 基 于 光 电 传 感 器 技 术 的 智 能 车 优 化 与 改 进
1 3 0 5
机 驱动 模块 实现 电机 的转 速和 正/ 反 转控 制 ; 光 电 编 码器 采集 智 能 车行 驶 的实 际 速 度 , 以便 实 现速 度 的 闭环控 制 ; 摇 头 和转 向舵 机 分 别 用 于 负 责激
MC 9 S 1 2 XS 1 2 8为 核 心 , 配 以 必要 的 电 源 管理 、 激 光 传 感 器及 电机 驱 动 等 模 块 电路 ; 软件 设计重 点介绍 了 路 径 识 剐 原理 以及 两 个 随动 舵 机 的 控 制 算 法 和 速 度 P I D 控 制 策略 。 经 实 际 赛 道 整 机 调 试 证 实 : 该 智 能
光电传感器技术在智能控制中的应用
光电传感器技术在智能控制中的应用随着信息技术的发展,智能控制技术已经成为了现代化社会不可或缺的一部分,其中光电传感器技术在智能控制中的应用越来越广泛。
光电传感器是一种能够将光信号转换为电信号的传感器,它在检测、控制、计量、通信等方面具有广泛的应用,在智能控制领域中是一种重要的技术手段。
首先,光电传感器技术在智能楼宇控制中的应用越来越广泛。
楼宇控制是指对室内环境等多种参数进行监测和控制,改善室内环境的质量,提高室内空气的质量。
在楼宇控制中,光电传感器可以实现光照度的检测,根据室内和室外的光照度值,智能控制系统可以自动调节室内照明灯的亮度,达到节能的目的。
同时,光电传感器可以对室内空气温度、湿度、氧气含量等进行检测,以便智能控制系统实现自动空调、通风等控制,改善室内环境。
其次,光电传感器技术在智能安防控制中也有广泛的应用。
在安防设备中,光电传感器可以对入侵者的行为进行监测,如门窗被破坏、未经授权的门禁等。
通过光电传感器和智能控制系统的联动,可以实现对入侵者的自动报警,并展开相应的安全措施,确保安全。
第三,光电传感器技术在智能交通控制中使用越来越多。
智能交通控制是指使用先进的技术手段对交通路况进行监测和调控。
在智能交通控制中,光电传感器可以通过监测路面上的车辆、人员、物体等,实现对车辆行驶速度、道路拥堵、交通事故等进行监测和控制,乃至实现智能车道控制、智能信号灯等一系列智能化交通控制。
最后,光电传感器技术在通用工业上也有着广泛的应用。
在工业自动化过程中,监测和记录生产线运行状态是非常重要的。
光电传感器可以实现对生产线上产品的识别和检测,避免错误产品或不合格产品出现,确保生产的质量。
通过光电传感器和智能控制系统的联动,还可以实现对生产过程和生产效率的监控和控制。
总之,光电传感器技术在智能控制中的应用越来越广泛,它为智能控制技术的发展提供了有力的支持和保障。
未来,随着科技的不断发展,光电传感器在智能控制中的应用前景将更加广阔,有望开创出更多智能控制技术的新局面。
基于光电传感器的智能小车自动寻迹控制系统
基于光电传感器的智能小车自动寻迹控制系统宁慧英【摘要】在智能车自动寻迹系统中,自动寻线、避障及速度控制是智能车自动寻迹控制的基本功能.用于检测路径引导线的光电传感器阵列采用发光二极管和光敏电阻制作,检测车速和障碍物的功能则采用反射式红外光电传感器FS-359F实现,采用单片机STC12C5A60S2作为控制器,通过PWM控制方式对驱动电机进行调速,并根据路面和车速信息进行转向控制.试验表明,采用上述光电传感器的智能小车寻迹控制系统实现了智能小车沿路径引导线自动避障行驶.系统体积小、成本低、性能稳定可靠.%In automatic rail guided system for Intelligent smallcar,automatic rail guidance,obstacle avoidance and car speed detection are three fundamental functions. The photoelectricity sensors array for path rail detection were made by optodiodes and optoresisters. The function of detecting speed and obstacle was realized by reflective optoelectric sensors FS0359F. The MCU STC12C5A60S2 were used as central control unit, which output PWM signals to adjust the speed of driving motors and control the moving direction of small car by road environment and car speed information. The experiments show that the automatic rail guided control system has realized automatic moving control with rail guidance and obstacle avoiding for the intelligent small car. It is a system of low cost,small size and stable fuction.【期刊名称】《仪表技术与传感器》【年(卷),期】2012(000)001【总页数】3页(P108-110)【关键词】智能车;光电传感器;自动寻迹控制【作者】宁慧英【作者单位】沈阳职业技术学院电气工程系,辽宁沈阳110045【正文语种】中文【中图分类】TP273.5;TP290 引言智能车又称轮式移动机器人,能够按预设模式在特定环境中自动移动,无需人工干预,可应用于科学勘探、现代物流等方面。
基于MC9S12DG128的智能车的控制系统的设计

T ch i alCom mu c t e nc ni a i ons
自 动 化 技 术 与 应 用 》2 01 1年第 3 O卷第 01期
基于 MC9 2 2 S1 G1 D 8的智 能车 的控 制系统 的设计
周 杰, 詹灯 辉
( 武汉理工大学 , 湖北 武汉 4 0 7 ) 3 0 0
F AS L H,2 KB的 E P E R0M , 提供 了 4路 8 或 2路 1 位 6
2 系统 总体 设 计 方 案
智能车控制系统 以 l 6位微处理芯 片 MC S 2 9 1DG1 8 2 为核心 , 设计 包括有 电源模 块 、传 感器检 测模块 、 电机 驱动模 块 、速 度反馈模 块和 舵机控 制模 块等几 个部分 ,
图4
小车 传感器 实际布置 示意 图
3 3 测速模块 .
经 验 交流
T ch i a『Comm u c i s e nc nIat on
《 动 技 应 》 01 第3 卷 1 自 化 术与 用 21 年 0 第0 期
一
般 情 况下 , 测速 的方式 有编 码器 、对 射 光 电式 、
下图 3 所示 。用单片机 PWM 端 口来控制发射端的 占空 比和 发射 周 期 , 过三极 管对 发射 管 端的 电流 进行 放 通 大, 提高驱动 能力 。红外光 电发射 管发出的是 9 0 m 左 8n
右的 红外光 , 肉眼是无法 看见 的 。在 实践 中 , 以用 用 可
智 能车 自动 循迹 的功 能 。
在整 个系统 设计及 功 能实现 中 , 利用 了单片机 内部
自 化技 与 用 21 年 O 第0 期 动 术 应 01 第3 卷 1
基于红外传感器的自动寻迹智能小车设计
毕业设计(论文)基于红外传感器的自动寻迹智能小车设计系别专业班级学号姓名指导教师基于红外传感器的自动寻迹智能小车设计摘要介绍了一种自动寻迹智能车的设计,研究了采用红外反射式光电传感器作为路径采集模块实现自动寻迹的软硬件设计方法。
系统采用Freescale 16位单片机MC9S12DG128为核心控制器,利用12个红外光电传感器构成的光电传感器阵列采集路面信息,单片机获得传感器采集的路面信息和车速信息,经过分析后控制智能车的舵机转向,同时对直流电机进行调速,从而实现智能车沿给定的黑线快速平稳地行驶。
介绍了光电传感器的寻迹原理,讨论了光电传感器排列方法、布局等对寻迹结果的影响及速度和转向控制的PID算法的研究和参数整定。
关键字:光电传感器,寻迹,路径识别,PWM,PIDDesign of autonomous tracing smart car based on infrared sensorsAuthor:Xue ChangliangTutor:Gu DeyingAbstractA design of autonomous tracing system in intelligent vehicle is introduced. The software and hardware design method which realizes the autonomous tracing using the infrared Reflective photoelectric sensors as the path recognition module is researched. The system employs Freescale HCS series 16 bit single-chip microcomputer MC9SDG128 as its main controller and an array of photoelectric sensors for recognizing the path information. Single-chip Microcomputer energizes the PWM signal to steer and control the speed of the DC electric motor according to the analysis of the path and speed information from sensors. Consequently, this intelligent vehicle can track the black-guide-line automatically and move forward following the line quickly and smoothly. The autonomous tracing principle of photoelectric sensor is presented. The effects of sensor s’ array method, overall arrangement on the autonomous trace are discussed. And the use of PID algorithm in speed and steering control.Key words : photoelectric sensor ,autonomous tracing, path recognition, PWM,PID目录第1章绪论 (1)1.1 课题的研究背景 (1)1.2 国内外智能车的研究现状 (1)1.3 本文内容及结构安排 (3)第2章红外传感器的寻迹原理及布局对寻迹的影响 (4)2.1红外传感器寻迹原理 (4)2.2传感器布局对路径识别的影响 (6)2.2.1布局相关参数 (6)2.2.2一字型与八字型布局研究 (6)第3章智能车机械结构的调整 (9)3.1 赛车参数 (9)3.2舵机安装方式调整 (10)3.3 前轮定位 (10)3.3.1主销后倾角 (10)3.3.2主销内倾角 (11)3.3.3 前轮外倾角 (12)3.3.4前轮前束 (13)3.4重心位置 (13)3.5 齿轮传动间距调整 (14)3.6后轮差速机构调整 (14)第4章系统硬件设计 (15)4.1 S12控制核心 (16)4.2电源管理模块 (17)4.2.1 单片机稳压电源电路设计 (17)4.2.2 舵机电源模块设计 (19)4.3 电机驱动模块 (20)4.4速度检测模块 (23)4.5 路径识别模块 (25)第5章系统软件设计 (27)5.1 系统的模块化结构 (28)5.1.1 时钟初始化 (28)5.1.2 串口初始化 (28)5.1.3 AD初始化 (29)5.1.4 PWM初始化 (30)5.2 路径信息处理 (32)5.3 数字滤波算法 (33)5.4 小车控制算法 (35)5.4.1 PID算法 (37)5.4.2 舵机控制 (39)5.4.3 电机控制 (39)第6章系统调试 (40)6.1 开发调试工具 (40)6.2 无线调试模块 (42)6.3拨码开关调试 (42)6.4 试验结果分析 (42)结论 (44)致谢 (45)参考文献 (46)附录 (47)附录A 硬件原理图 (47)附录B程序源代码 (49)附录C Sorting out PID controller differences (69)第1章绪论1.1 课题的研究背景汽车工业发展已有100多年的历史。
基于光电传感器的自动循迹小车设计
2010-2011 第二学期光电传感技术院系电子工程学院光电子技术系班级科技0803班姓名熊浩学号********班内序号10考核成绩基于光电传感器的自动循迹小车设计摘要新一代汽车研究与开发将集中表现在信息技术、微电子技术、计算机技术、智能自动化技术、人工智能技术、网络技术、通信技术在汽车上的应用。
智能汽车是是现代汽车发展的方向。
本系统采用光电传感器作为道路信息的采集传感器,单片机为控制系统的核心来处理信号和控制小车行驶。
MC9S12系列单片机在汽车电子控制领域得到广泛应用。
本论文是利用Freescale的MC9S12XS128微控制器对智能车系统进行设计。
智能车系统设计包括硬件电路和控制软件系统的设计。
关键字:智能车;光电传感器;自动循迹;控制算法;PID;引言自动循迹智能车是一个集环境感知、规划决策、自动驾驶等多种功能于一体的综合系统。
除了特殊潜在的军用价值外,还因其在公路交通运输中的应用前景受到很多国家的普遍关注。
近年来其智能化研究取得了很大进展,而其智能主要表现为对路径的自动识别和跟踪控制上。
路径跟踪问题的研究正吸引着国内外计算机视觉、车辆工程与控制领域学者们越来越多的注意,得出了很多有意义的成果。
这些方法可分为两类,即传统控制方法和智能控制方法。
传统控制方法多建立在精确数学模型基础上,而自动引导车系统具有复杂的动力学模型,是一个非线性、时延系统,由于各种不确定因素的存在,精确的数学模型难以获得,只能采用理想化模型来近似,所得到控制律较为繁琐,给实际应用造成不便。
随着近年智能控制论的兴起,一些智能控制方法如模糊控制,神经网络等逐步走向完善,尤其是模糊控制理论在很多地方显示出相当的应用价值,以此为基础,设计新概念的控制器受到人们很大关注。
同时,人们也正考虑这在各种方面包括硬件和软件的综合技术开发和研究探索,智能车的技术将会趋于成熟并得到广泛的应用。
本课题利用传感器识别路径,将赛道信息进行存储,利用单片机控制智能车行进。
基于多传感器协同的智能循迹小车控制系统设计

勺 化
基 于多传感器协 同的智能循迹小车控制系统设计
Des i gn of i nt el l i gen t t r acki ng car cont r ol sy st em b ased on m ul t i - sensor cooper at i on
可靠性设计 ,改进后智 能小车循迹 可靠性和 过弯速度有大幅提升。 关键 词 :多传 感器协同 ;循迹小车 ;控制 系统 中图分类号 :T P 2 7 3 文献标 识码 :A 文章编 号 :1 0 0 9 - 0 1 3 4 ( 2 0 1 3 ) 1 1 ( 下) -O l 4 3 -0 5
控 制 系统 设 计 方 案 , 介 绍控 制 系统 的硬 件 组 成 、 软 件 设 计 和 控 制 策 略 ,并 将 所 开 发 的控 制 系统 装 车 进 行 验 证 试 验 ,为 智 能 循 迹 小 车 精 确 化 循 迹 及 车辆 控 制提 供 有益参 考 。
循迹 传 感器 3
马世典’ ,孔令晶 ,韩 牟 ,吴 狄’ ,唐 鑫’
MA S h i . d i a n ‘ ,K ONG L i n g - j i n g ,H AN Mo u ,W U D_ 1 'T AN G Xi n 。
( 1 . 江苏 大学 汽车工程研 究院 ,镇江 2 1 2 0 1 3 ;2 . 江苏大学 计算机与通信工程学 院,镇江 2 1 2 0 1 3 ) 摘 要 :介绍了基于多传感器协同的智 能循迹小 车控 制系 统设 计。研究 了小 车在各工况下工作情况 ,以 X Q 8 6 6 - 4 F R 为控制 核心 ,搭 建包含轨迹传感 器、轮速传感 器和转向角传 感器在内的多传 感器 协同控制 硬件系 统。设计 多传感 器协 同方 法以及多 路况控制策 略。开发 控制软件 并进行软件
基于CCD图像识别的HCS12单片机智能车控制系统_刘建刚
光电 技术 应用
ELECT R O- OPT IC T ECHN OL OGY A PPL ICA T ION
Vol. 22, No. 6 December . 2007
文章编号: 1673- 1255( 2007) 06- 0052- 04
基于 CCD 图像识别的 H CS12 单片机智能车控制系统
的光电传感器识别路径方案, 该摄像头传感器 可以获取更多的路径信息, 使智能 车按任意 给定的黑色 引导线更 能以较快的 速
度平稳地运行.
关键词: 图像识别; 智能车; HCS12 单片机; CCD
中图分类号: TP212. 9
文献标识码: A
Design of Smartcar. s HCS12 MCU Control System Based on CCD Image Recognition
1 检测前瞻距离远 2 检测范围宽
3 检测道路参数多 4 占用 M CU 端口 资源少
1 电路相对设计复杂 2 检测信息更新速度慢 3 软件处理数据较多
2 主要电路模块设计
2. 1 CCD 路径识别电路
摄像 头的 主要 工作 原理 是[ 2] : 按一 定 的分 辨 率, 以隔行扫描的方式采样图像上的点, 当扫描到某 点时, 就通过图像传感芯片将该点处图像的灰度转 换成与灰度成一一对应关系的电压值, 然后将此电 压值通过视频信号端输出. 具体参见图 1. 当摄像头 扫描完一行, 视频信号端就输出有一个电压/ 凹槽0, 并保持一段时间, 此/ 凹槽0叫做行同步脉冲, 它是扫 描换行的标志. 然后, 跳过一行后, 开始扫描新的一 行, 如此下去, 直到扫描完该场的视频信号, 接着就 会出现一段场消隐区. 在这若干个消隐脉冲中, 有个 脉冲远宽于其他的消隐脉冲, 该消隐脉冲即称为场 同步脉冲, 它是扫描换 场的标志. 摄像头每秒 扫描 25 幅图像, 每幅又分奇、偶 2 场, 先奇场后偶场, 故 每秒扫描 50 场图像. 即扫描周期为 20 ms.
基于红外光电传感器的智能车两轮差速转向模糊控制
检 测 到 导 引 带 传感 器 读 数 为 1 检测 到地 面 传 感 器读 数 为 0 , )
表 1 传 感 器 检 测 信 号 值
A CD 对应 十进制数 能否 出现 B 00 0O O 可能 出现 00 01 1 可能 出现 O 1 00 o l ol 0o lo 0 0 1l 0 l lO
a d r h p e s o h o moo sT e e p r na e ut h w h tt e t o wh ldf r n e s e d se r g ne l e t n i t s e d f t e t t r .h x e i t lr s l s o ta h g w me s w - e ie e c p t e i i l n n t i g
Ke wodsifa e s ns , t lge t v hi e, f en i t r y r : r r d e ori el n e cl dier t see i f z y c tol n n i al ng. z on r u
智 能 车设计 是 一 种 以汽 车 电 子 为背 景 , 盖 控制 、 涵 电子 电气 、 计算机、 机械 等多 学科 的科 技创 意 性设 计 。它 主要 由路 径 识别 、 速 度采集、 角度 控 制 及 车速 控 制等 功 能 模 块组 成 。 智 能小 车 要 实 现 的最 基 本 功 能 简单 的来 说 , 是 沿 着 固定 导 引 带 运 行 , 小 车 的 就 对 控制 主要 体 现 在 当小 车 相 对 于导 引 带发 生 偏 移 时 , 制 系 统 做 出 控 相应 的调 整 将 偏差 消 除 , 小 车运 行 方 向 与导 引 带保 持 一 致 。 如 使 果在 小 车在 没 有脱 离 导 引 带 的情 况 下可 以很 快 的将 偏 差 消 除 , 且 没有 较 大 的波 动 , 我们 就认 为 已 经达 到 了控 制 的要 求 。
基于红外反射式光电传感器的智能循迹小车

电路 L9 27的半 步/ 步、 整 正转/ 反转 和刹 停 控 制信 号输 出;
P. 3 1用于驱 动电路 的时钟信号输 出。
电源
1 系统 工作原 理
1 1 智能 小 车 寻 迹 原 理 … .
光器 蓑 电2 电 电2片 机 机 传H 驱 I 感 ” 动 2 3 电1
关键词 : T 9 5 ;反射式光 电对管 ( P 2 ) A 8C2 m,2o ;步进 电机 ,
中图 分 类 号 :P 8 T为 一种智 能 化的 交通 工具 , 现 了车辆 工 体 程、 人工智 能 、 自动控制 、 计算机等 多个学科领域理论技 术的 交叉和综合 , 是未来 汽车发展 的趋 势。寻迹小车可 以看 作是 缩小化 的智能 汽车 , 它实现的基本 功能是沿 着指定轨 道 自动
图 1 智能小车原理框图
在智能车系统 中, 寻迹 电路采用红外光 电传感器进行 检 测并且寻迹运动 。红外发 射管发射 的红外线 具有一 定 的方 向性 , 当红外线 照射到 白色地 面时会 有较大 的反射 , 如果 距 离取值合适 , 红外 接收 管接 收到反 射 回 的红外线 强 度就 较 大; 如果红外线 照射到黑色标 志线 , 黑色标 志线会 吸收 大部 分红外光 , 红外 接收管接收 到红外线 强度 就很弱 。寻迹时 , 引导线是黑颜色 , 不宜反光 , 当红外 发射管输 出信 号照射 到
:
个负跳变过程 , 通过 对此信号 高低 电平 的检测就 可以知道小 车是正在沿着 引导线 行驶 , 若不是 沿着引导 线行驶 , 片机 单 根据传感器送 回的信号可 以判断并驱动 电机正确转 向, 而 从 使小车沿着正确 的轨 道行驶 。本 系统在小 车的前部 朝地 面
基于红外光电传感器的智能车自动寻迹系统设计

基于红外光电传感器的智能车自动寻迹系统设计一、本文概述随着科技的飞速发展,智能化、自动化的技术在各个领域得到了广泛的应用。
在智能交通系统中,智能车自动寻迹系统以其高效、准确的特点,受到了广泛的关注。
本文旨在探讨基于红外光电传感器的智能车自动寻迹系统的设计,以期能为智能交通系统的发展提供有益的参考。
本文将详细介绍红外光电传感器的工作原理及其在智能车自动寻迹系统中的应用。
红外光电传感器作为一种非接触式的测量工具,具有灵敏度高、响应速度快、抗干扰能力强等优点,因此在智能车自动寻迹系统中具有广泛的应用前景。
本文将深入探讨智能车自动寻迹系统的总体设计方案。
包括系统的硬件设计,如红外光电传感器的选型、电路设计、微处理器的选择等,以及软件设计,如路径识别算法、运动控制算法等。
通过对这些关键技术的详细分析,以期能为实际系统的设计提供有益的参考。
本文将通过实例分析,验证所设计的智能车自动寻迹系统的性能。
通过在不同环境下进行实际测试,收集并分析系统的寻迹精度、速度、稳定性等数据,从而评估系统的性能,并提出改进意见。
本文旨在对基于红外光电传感器的智能车自动寻迹系统进行全面、深入的研究,以期能为智能交通系统的发展提供有益的参考。
二、红外光电传感器原理及特性红外光电传感器是一种利用红外线进行非接触式测量的传感器,其基本原理是基于光电效应和红外辐射的特性。
红外光电传感器内部包含一个发射器和一个接收器,发射器发射出特定波长的红外线,当这些红外线遇到物体后,部分会被反射回接收器。
根据物体对红外线的反射程度,接收器可以感知到物体的存在及其与传感器的距离。
红外光电传感器具有多种特性,使其特别适用于智能车自动寻迹系统。
红外光对许多物体的穿透能力较弱,因此传感器能够精确地感知物体表面的细节,这对于智能车寻迹系统中的路径识别非常关键。
红外光电传感器对环境光线的变化不敏感,即使在日光下也能正常工作,这使得系统在各种光线条件下都能保持稳定的性能。
自动寻迹智能车设计
自动寻迹智能车设计摘要:本文旨在设计一种自动寻迹智能车,该车能够根据地面上的线路进行移动,并避免碰撞等危险情况。
本设计基于光电传感器技术,通过获取地面上的光信号来实现寻迹功能。
该车还配备了超声波传感器和红外避障模块,能够对前方障碍进行探测和避让。
本设计采用单片机控制和模组化设计,使得车辆控制和维护较为方便。
关键词:自动寻迹、光电传感器、超声波传感器、红外避障、单片机正文:随着智能化技术的不断发展,自动寻迹智能车成为人们研究的热点之一。
本设计基于光电传感器技术,通过获取地面上的光信号来实现寻迹功能。
当传感器接收到黑色或白色的光信号时,车辆向相应的方向进行调整,以保持在线路上行驶。
如果车辆偏离了线路,传感器就会控制车辆重新回到线路上,保证行驶的准确性和稳定性。
此外,本设计还配备了超声波传感器和红外避障模块。
当车辆进入障碍物区域,超声波传感器会探测到前方障碍距离,并发送信号到单片机,控制车辆停止前进。
如果障碍物是可避让的,则车辆会进行相应调整,继续行驶。
红外避障模块则用来检测车辆左右两侧是否有障碍,避免碰撞。
本设计采用单片机控制和模组化设计,使得车辆控制和维护较为方便。
车辆的控制器由主板和多个子模块组成,各模块之间通过总线进行通信。
这种设计方案使得车辆的功能模块化,在实际应用中可以根据需要进行灵活组合和调整。
总之,本设计基于光电传感器技术、配备超声波传感器和红外避障模块,采用单片机控制和模组化设计,能够实现自动寻迹和避障功能。
该智能车在物流、工业自动化等领域具有广泛应用前景。
为了使自动寻迹智能车能够准确地寻线和避障,本设计采用了高精度的光电传感器。
光电传感器是一种能够将物理量转换为光信号的传感器,其工作原理是通过发射光束,测量光信号的强度,进而确定当前位置和方向。
在本设计中,光电传感器可以通过调整位置和角度,对不同颜色的线路进行识别和跟踪。
通过对光电传感器的实验和精度测试,能够有效保证车辆在移动过程中的精度和稳定性。
光电传感器在智能小车设计中的应用
光电传感器在智能小车设计中的应用摘要:本文简要分析了电传感器的结构及其工作的原理。
并从光电传感器的工作原理为基础,对智能小车的运作加以设计,本文首先指出了光电传感器在智能小车中的应用的相关部件,并对这些部件的作用加以简单的介绍。
此后光有对电传感器在智能小车中的应用加以详细的编程,分析其运作的程序。
关键词:光电传感器智能小车应用在当今社会中,随着科学技术的日新月异,单片机与光电传感器接口程序的实际应用愈来愈普遍。
光电传感器作为传感器的一张新形式具有,体积小、性能高、不触碰被测物体,精准测量被测物体的运转形式等优点。
光电传感器普遍应用于多费率电表、IC卡压力表与电能转换装置转速测量等诸多测量计数的工具。
1 光电传感器概述1.1 光电传感器的结构分析以光电器件作为程序元件的传感器就是光电式传感器。
它能够用于测量更替为光量转换的其他非电量,如部件半径、表面光滑度、更替、移动、振动、速度,以及被测物体的体积、工作途径的认定等;也能够用来测量直接引起光量转换的非电量,如光强、光照度、辐射测温、气体成分分析等。
光电式传感器具有非接触、响应快、性能可靠等突出特点,因此在工业自动化装置和机器人中获得普遍应用。
新的光电器件持续涌现,尤其是CCD图像传感器的出现,为光电传感器的进一步应用开创了新的历史纪元。
光电传感器一般由发送器、接收器和测量程序等三部分构成。
1.2 光电传感器工作原理依据光通量对光电部件的作用原理不同所设计的光学控制程序的形式是繁多复杂的,依照光学测控程序发出量性质能够把测控程序分为两种,即模拟式光电传感器与开关式光电传感器。
模拟式光电传感器是将被测量物体更替成不断转换的光电流,它与被测量物体之间呈单值关系。
模拟式光电传感器依据被测量(测量目标物体)途径能够分为透射(吸收)式,漫反射式与遮光式(光线阻档)三大种类。
透射式指的是被测物体放在光路程序中,恒光源射发的光能量穿过被测物,部份被吸收后,透射光投射到光电元件上;漫反射式指的是恒光源射发的光投然后由被测物体的表面反射到光电元件上;遮光式指的是当光源射发的光通量经被测物光遮其中的一部份,使投射到光电元件上的光通量更替,更替的幅度与被测物体在光路路径相关。
《2024年基于STM32智能小车的设计与实现》范文

《基于STM32智能小车的设计与实现》篇一一、引言随着科技的不断进步,智能小车作为一种集成了计算机、传感器和执行器等技术的产品,已经在各个领域得到了广泛的应用。
本文旨在设计并实现一款基于STM32微控制器的智能小车,通过对小车的硬件设计和软件编程进行详细的阐述,以期为相关领域的科研和实践提供一定的参考。
二、硬件设计1. 微控制器选择本设计选用STM32F4系列微控制器,该系列具有高性能、低功耗等特点,能够满足智能小车在复杂环境下的实时控制需求。
2. 传感器模块传感器模块包括红外避障传感器、超声波测距传感器、光电编码器等。
这些传感器能够实时获取小车的环境信息,为小车的智能控制提供数据支持。
3. 电机驱动模块电机驱动模块采用H桥电路,通过PWM信号控制电机的转速和方向。
同时,为了保护电机和电路,还设置了过流、过压等保护措施。
4. 电源模块电源模块采用锂电池供电,通过DC-DC转换器为小车各部分提供稳定的电源。
同时,为了方便充电,还设置了USB接口。
三、软件实现1. 开发环境搭建本设计采用Keil uVision5作为开发环境,通过JTAG或SWD 接口进行程序的烧录和调试。
2. 程序设计程序设计包括主程序、传感器数据处理程序、电机控制程序等。
主程序负责协调各部分的工作,传感器数据处理程序负责获取并处理传感器的数据,电机控制程序则根据数据处理结果控制电机的转速和方向。
3. 算法实现本设计采用PID算法进行电机控制,通过调整PID参数,使小车在各种环境下的运动更加稳定。
此外,还实现了路径规划算法和避障算法,使小车能够根据环境信息自主规划路径和避障。
四、系统测试与实现效果1. 系统测试在完成硬件设计和软件编程后,对智能小车进行了系统测试。
测试内容包括小车的运动性能、传感器数据的准确性、电机控制的稳定性等。
测试结果表明,本设计的智能小车具有良好的性能和稳定性。
2. 实现效果在实际应用中,本设计的智能小车能够根据环境信息自主规划路径、避障和执行其他任务。
基于双排光电传感器的智能车控制策略研究

排固定在车身上 , 以直线排列扫描车前距前轮轮 轴5 0 m m处 , 相邻两激光管相距 2 0 a r m。另一排激 光管 与摇 头舵 机相 连 , 受 摇头 舵机 控制 , 扫描 范 围是 以舵 机为 圆心 , 半径 为 4 5 c m 的 圆弧 , 相邻 激 光 管 的 间 隔角度 为 2 . 5 。 , 此 时 圆弧 上 的相邻 激 光 管 间 的距 离也 近 似 等 于 2 0 mm。 设 定 路 径 黑 线 宽 度 为 2 5 m m, 故两排激光管都至少有一个 激光点检 测到 黑线 。整 体激光 分 布如 图 2 所示 :
2 . 2 光 电传 感器
识别 、 传感技术 、 电子 、 电气 、 计算机 、 机械等多个领 域 的智 能控 制 系 统 。 目前 , 智 能 车 主要 采 用 自动 循 迹 的巡航 方 式 , 既通 过 传 感 器 采 集 白色 底 板 上 黑 线 的轨 迹 , 实 现 自动转 向 、 行驶 的功 能 。 传统光 电循迹智能车采用固定光 电传感器的方 式, 这样 采集 的路 径 信 息 范 围仅 仅 是 激 光 所 覆 盖 的 区域 , 倘 若 直 接 增 大 扫 描 范 围 又 会 降低 采 集 精 度 。 为 了解决 这一 矛 盾 , 采 用 一 排 固定 传 感 器 和一 排 随 动摇 头传 感器 相 结 合 获 取路 径 信 息 , 此 设 计在 保 证 采 集 精度 的 同时扩 大 了扫 描 范 围 ] 。本 智 能车 以 飞 思卡 尔公 司 9 S 1 2 X S 1 2 8单 片机 为控 制 核 心 , 根 据 双 排光电传感器采集 的路径信息 , 提 出一种 自动识别 路 径 曲率 半径 的优 化 算 法 , 完成 对智 能 车转 向 和速 度 的控 制 [ 3 ] , 提 高其 自动循 迹行 驶性 能 。 2 硬 件 结构 智能车硬 件结 构 包括 : 供 电 电路 、 9 S 1 2 X S 1 2 8 单片机 、 光电传感器 、 旋转角传感器 、 转 向舵机和摇 头 舵机 、 电机驱 动 电路 、 测速 模 块 。 智 能 车总体 结 构如 图 1所示 :
基于光电传感器的飞思卡尔智能车设计

基于光电传感器的飞思卡尔智能车设计作者:胡骏王先鲜杜春来来源:《数字技术与应用》2012年第10期摘要:本文设计一种基于光电传感器并自主驾驶的飞思卡尔智能车模型。
智能车模型以飞思卡尔公司16位单片机MC9S12XS128为核心控制器;光电传感器采用速度快,精度高,量程大,抗干扰能力强的激光传感器;系统通过激光传感器的阵列反馈信息,得到智能车与路径的水平偏差,采用PID算法控制舵机转向及直流电机的速度调节,从而实现飞思卡尔智能车快速稳定的自主驾驶。
关键词:智能车光电传感器 PID算法中图分类号:TP242 文献标识码:A 文章编号:1007-9416(2012)10-0036-010、引言随着计算机技术、传感器技术、控制技术的高速发展和广泛应用,智能控制技术取得了巨大的进展。
而智能车正是最典型的一个例子,结合传感器技术和控制技术实现智能车高速稳定自主的驾驶。
本文通过对自主寻径智能小车的设计和研究,对促进控制技术及汽车电子科学技术的发展,起到了良好的推动作用。
1、系统总体设计本文设计的智能小车主要由路经检测、电机驱动、舵机转向及车速控制等功能模块以及软件控制算法构成。
智能车以飞思卡尔公司生产的MC9S12XS128为核心控制器,采用激光传感器对路径进行检测,并反馈路况信息,再通过PID算法实时控制舵机转向,以及对车速进行调节。
该智能车的总体结构框图如图1所示。
2、硬件结构设计2.1 激光传感器设计激光传感器由两部分构成,一部分为发射部分,一部分为接收部分。
发射部分由一个振荡管发出180KHz频率的振荡波后,经三极管放大,激光管发光;接受部分由一个相匹配180KHz的接收管接受返回的光强,经过电容滤波后直接接入MC9S12XS128控制器的IO口,检测返回电压的高低。
激光传感器原理如图2.1所示。
2.2 路经检测原理根据不同颜色对光线吸收程度不同,光线反射强度也就不同的事实,为智能车设计黑色为边界的白色跑道。
光电循迹小车的运动控制系统设计

1 光电循迹传感器原理智能循迹小车主要由STC89C52RC 单片机开发板、HJ-IR1循迹模块、L298N 驱动模块、电机模块、电源模块等组成,图1是智能循迹小车系统组成。
采用STC89C52单片机I/O 口控制L298N 驱动模块,来控制四个直流电机的运动形态,完成规定黑色线循迹控制。
图1 智能循迹小车控制系统组成图智能小车采用HJ-IR1光电循迹传感器,图2是红外发射管红外光线发射到黑色线时,由于黑色对红外光线的吸收高,因此反射回红外接收管的红外光线相对减少,此时I/O 口输出高电平,如果红外发射管反射到其它路面则I/O 口输出低电平。
图2 黑色障碍物光路图2 系统的硬件设计2.1 单片机电路的设计STC89C52单片机的最小系统,主要扩展包括:供电电路、复位电路和时钟电路。
2.2 传感器外设电路光电循迹传感器电路如图3所示。
当发射管发出的红外线遇到黑线时,黑线吸收了红外线,导致反射回来的红外线很少,所以光敏三极管不会导通,从电路中可以看出遇到黑线时输出端输出AOUT模拟量在5V,通过比较器比较在输出DOUT 数字量高电平1给单片机。
图3 循迹传感器电路图2.3 电机驱动电路电机的驱动电路如图4所示,采用L298N 驱动芯片带动两个直流电动机进行运转,选用电机是抗干扰碳刷TT 减速马达,抗干扰碳刷到电动机的作用是改变DC 电机的电流方向。
2.3.1 H 桥驱动电路分析电动机控制电路的双H 桥,包括八个三极管和两个马达。
没有电流进入,从而直流电机不工作。
使能端还是给高电平1让其使能工作,然后给1,IN2输入低电平0,使得三极管T2和T3而三极管T1和T4导通,这样使电机反转。
分别给ENA、IN1、IN2输入高电平1、低电平0、其使得三极管T2和T3导通,三极管T1和T4不导所以通过一路电机的分析我们可以得出四路电机的工在编写程序的时候怎样给芯片定义高低电平决定了小车的运动状态。
2.3.2 小车运动控制逻辑小车在L293D 驱动芯片控制下可以得到电机控制逻辑:当使能端ENA 为高电平时,如果给引脚IN1输入低电平而给引脚IN2输入为高电平,则电机正转;如果引脚IN1输入高电平而引脚IN2输入低电平,则电机反正转;IN1和IN2都输入低电平时,电机停止。
光电传感器技术促进智能车优化控制研究

42 | 电子制作 2018年2-3月合刊个领域的知识如:计算机、自动控制、机械等。
社会的发展越来越需要高科技来支撑,因此,智能车在人们的平时生活以及企业的生产中占据了重要地位,近些年我们可以看到在道路上、物流中、甚至柔性制造系统中智能车已经被熟练地运用在其中,其已经成为研究领域的重要研究项目。
就现在来看,智能车已经可以在有标记的路上为驾驶员进行辅助甚至可以无人驾驶,这些智能车常常依据识别特殊的标记来完成,经过系统判断和模仿技能来完成驾驶操作。
智能车即为一种可以自行导动的车,在规定区域内沿设定轨迹前进。
在运动过程中主要由电机驱动系统和方向系统进行控制。
以黑色线作为引导线,白色则作为地面颜色。
该车的驱动应用的是直流电机,并采取PWM 已达到电机的调速。
为了实现速度快、行进平稳的目标,需要将识别路径、转向时电机的控制等操作系统精准的组合到一起。
1 硬件的结构该车硬件主要由:供电电路、光电传感、转向和摇头舵机等一系列系统组合而成,如图1所示。
图1■1.1 飞思卡尔单片机型号为9S12XS128的单片机为飞思卡尔公司研发设计调制电路,接收管只能接收到调制后的光信号,以防可见光对其电路的影响。
智能车选择了双排的激光管来获得信息,有一排安置在车身上,用直线排布,与前轮轮轴距离50mm 左右,两个激光管之间的距离为20mm 左右。
另一排则和摇头舵机连接,由该舵机控制,控制范围在以舵头为圆心,直径为90cm 的圆弧,每个激光管之间的距离大约为20mm 左右。
因此,需要设定黑线的宽度为25mm,这样可以保证两排激光管中至少会有一个检测到黑线的位置。
■1.3 电机驱动作为为智能车提供驱动力的电机,其性能直接影响了车的速度响应。
电机的驱动芯片应用的是飞凌公司的BTS7960,它是大电流的集成芯片,电流最高可达到43A,控制信号能到达25kHz,为了得到更大的驱动力,车内应用了两个芯片,以达到更快速的目的。
2 摇头舵机此舵机采用的是Futaba 公司的产品,S3010数字舵机来促使激光管追踪黑线的路径,因为响应速度有一定的限制,单片机发送信号后舵机不能立刻将信号消息处理转化为指定的角度,所以还要加配一个旋转角传感器来辅助舵机完成角度的转换,单片机通过旋转角传感器来获得当前的角度并根据PWM 信号来综合确定下一刻舵机的脉宽值。
智能小车循迹设计方案
智能小车循迹设计方案简介智能小车是一种能够根据线路信号自主行驶的机器人小车。
循迹技术是智能小车中重要的一部分,它能够使小车按照事先设定的轨迹行驶,并通过传感器感知周围环境,实现自主导航。
本文将介绍一种基于光电传感器的智能小车循迹设计方案,包括系统架构、硬件设计和软件设计。
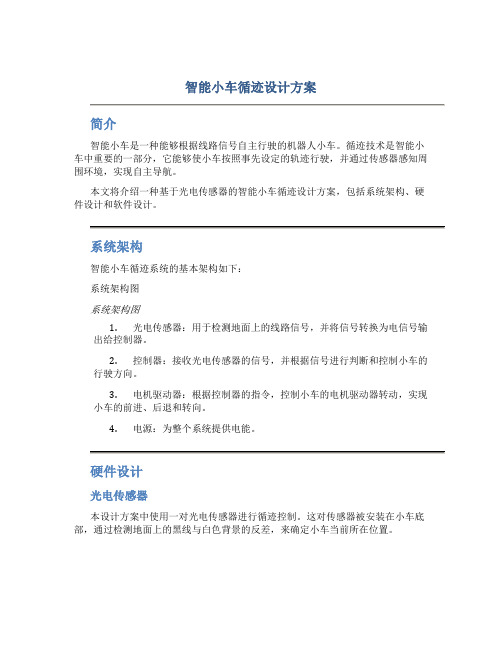
系统架构智能小车循迹系统的基本架构如下:系统架构图系统架构图1.光电传感器:用于检测地面上的线路信号,并将信号转换为电信号输出给控制器。
2.控制器:接收光电传感器的信号,并根据信号进行判断和控制小车的行驶方向。
3.电机驱动器:根据控制器的指令,控制小车的电机驱动器转动,实现小车的前进、后退和转向。
4.电源:为整个系统提供电能。
硬件设计光电传感器本设计方案中使用一对光电传感器进行循迹控制。
这对传感器被安装在小车底部,通过检测地面上的黑线与白色背景的反差,来确定小车当前所在位置。
控制器控制器是智能小车循迹系统的核心部分,其主要功能是接收光电传感器的信号,并根据信号进行判断和控制小车的行驶方向。
在本设计方案中,我们使用单片机作为控制器。
单片机具有较高的计算能力和较快的响应时间,能够满足智能小车循迹系统的需求。
电机驱动器电机驱动器用于控制小车的电机驱动器转动,实现小车的前进、后退和转向。
在本设计方案中,我们使用直流电机作为小车的驱动器,并采用相应的电路设计来控制电机的转动。
电源为整个系统提供电能的电源是智能小车循迹系统的基础。
在设计电源时,需要考虑系统的功耗和电压稳定性等因素,保证系统能够正常运行。
软件设计智能小车循迹系统的软件设计主要包括信号处理和控制算法。
信号处理在信号处理方面,首先需要对光电传感器的输出信号进行采集和处理。
采集到的模拟信号需要经过模数转换器转换为数字信号,然后通过滤波和放大等处理得到准确的线路信号。
控制算法控制算法负责根据信号判断小车的当前位置,并控制小车的行驶方向。
常见的控制算法有比例控制和PID控制等。
比例控制算法根据当前位置与目标位置的偏差大小来控制小车的速度和转向;PID控制算法在比例控制的基础上,加入了积分和微分的部分,能够更精确地控制小车的行驶。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3.2路径识别算法 智能车采用了8个“一”字形排列的光电传感器构成的传 感器阵列来进行路径识别,工作时首先通过光电传感器阵列检 测轨迹黑线的当前位置,然后根据检测结果判断智能车与轨迹 偏离的情况。 本文采用的具体位置算法为:首先给智能车的各个传感器 定坐标值,具体方法是给智能车最左边位置的传感器坐标值定 为0,传感器的坐标值从左至右逐渐递增,且最右边位置的传 感器坐标值定为7,接着AD采样,找出转换后的最大值 (max)以及其所在的位置,再由差值(即8个采样值与一个 动态阈值分别作差)找出黑线的位置。 3.3舵机和驱动电机控制算法 在实际设计过程中,为了简化智能车参数的调试设计,系 统采用模糊控制算法来控制舵机转角以进一步提高智能车整体 的转向灵敏度,而实践也表明,采用模糊控制算法已经足以满 足智能车的转向要求[8]。 为了达到好的速度控制效果,对速度进行闭环控制是必须 的。这里所说的速度控制策略是指设定速度的确定方法——设 定速度主要由道路与直道的偏差来决定,道路越接近直道,设
move
forward
following the line quickly and smoothly.Experimental
actuator
show
that
the system
meets
anti—interfere.adjusts
quickly,while has
little
error
in steady state,good
中华测控网
chinamca.com
万方数据
第8期
翁
卓,等:摹于光电传感器的智能车控制系统设计
・1791・
<开始 上
单片机初始化
>
电机,其加速减速特性较差.因此如采用PID控制,P参数只 能控制在很小的范围,否则很容易发生超调。P参数的减小, 导致电机速度响应变慢,影响实际赛车控制效果。而选用 bang—bang控制方法,让电机动态稳定在一定转速下,实际 在赛道上表现很稳定,而且速度响应很快。
2.4
L启动毒时器—J
—l—
f豢
心田
l模糊拧制算法I l控制舵机转向 图5系统程序流程图
m/s的平均速度。
参考文献: [1]卓晴,黄开胜,邵贝贝.学做智能车——挑战“飞思卡尔”杯 [M].北京:北京航窄航天大学出版社,2007. [23周 斌,李立国,黄开胜.智能车光电传感器布局对路径识别的影
响研究[J].电子产品世界,2006,(9):139—140. [3]何 勇。王生泽.光电传感器技术及应用[M].北京:化学工业出 苏.基于单片机的智能小车的设计与制作 版社,2003. [4]董涛,刘进英.蒋
on
430074,China;
2.Shenzhen Institutes of Advanced Abstract:A smart car control cale
XS series 16 system
518055.China)
system
based
the
infrared reflective photoelectric
dynamic characteristics
robustness.
Key words:photoelectric
sensor;smart car;XSl2 single--chip
path
பைடு நூலகம்
recognition
0
引言
在自动化领域中,许多复杂性操作和对人体有害的工作都
采集模块,电机驱动模块,舵机驱动模块,电源管理模块, 调试模块(LCD和遥控器)。整个系统的结构示意图如图1
for recognizing the
to
path information.Single--chip Microcomputer
nalysis and
server tO steer
control the speed
of
the DC the
electric motor according
the
a—
of
的均匀、细腻uJ。 3
系统的控制策略与软件设计[‘】
3.1软件流程设计 智能车的运行控制是根据路径识别和车速检测所获得的当 前路径和车速信息,控制舵机和直流驱动电机动作,从而调整 智能车的行驶方向和速度。控制系统的软件设计基于
MetrowerksCodeWarrior 4.7编程环境[7],使用C语言实现。 图5为控制系统软件流程图。
图3路径检测电路图
2.3电机驱动模块设计 电机驱动采用Freescale公司的MC33886作为驱动芯片, 通过改变从单片机输入到芯片的PWM波的占空比来控制对电 机的供电电压的大小,从而控制电机的转动速率‘“。并通过 INl、IN2口送出PWM波来控制电机的正反转,实现赛车的 直道加速,弯道减速功能。在实际的设计过程中,采用两片
寻迹。 2
l系统总体设计
为了使小车沿着规定的赛道自动寻找黑色引导线并尽可 能地高速前进,小车必须具备一套集导引线检测并实时控制 汽车速度、姿态的智能处理单元。小车主要由以下几大部分 组成:信息处理芯片MC9S12XSl 28,传感器检测模块,速度
收稿日期:2010一OZ一27f修回日期:2010—03—29。 作者简介:翁卓(1985一),男,湖北武汉人,硬士研究生,主要从 事图像处理与传输、人工智能方向的研究。 熊承义(1969一),男,湖南常德人。博士,教授,主要从事图像处理 与传输、人工智能,模式识别等方向的研究。
Smart Car Control System Based
on
Photoelectric Sensor
Weng Zhu01”。Xiong Chengyil。Li Dantin91
(1.College of Electronic
Information Engineering,South~Central University of Nationalities,Wuhan Technology,Chinese Academy of Sciences.Shenzhen
所示。
由机器自动完成,为了实现这一下作,就要求机器有一定的智 能性。智能车模是未来智能汽车的微缩模型。它能够在循线标 志的导引下以较高速度自动避障前进。智能车即轮式移动机器 人,是一种集环境感知、决策规划、自动行驶等功能于一体的 综合智能系统,智能车集中地运用了自动控制、模式识别、传 感器技术、汽车电子、电气、计算机、机械等多个学科的知 识。一般而言,智能车系统要求小车在白色的场地上,通过控 制小车的转向角和车速,使小车能自动地沿着一条任意给定的 黑色带状引导线行驶。我国于2009年7月份成功举办了第四 届智能汽车大赛,本文以此为背景,基于XSl2单片机设计了 一种智能车系统t-“。硬件系统中的路径识别功能由红外光电传 感器实现,车速控制由光电编码器进行凋节。软件设计中实时 检测路况,并定时中断采集速度反馈值。
系统的硬件部分设计
电源是一个系统正常工作的基础,因此电源的设计至关
2.1电源模块设计 重要。本系统采用7.2 V的镍铬电池供电。为满足系统各模 块正常工作的需要,系统将电压值分为5V和7.2V两个档, 其中选择LM2940作为5V稳压芯片。各模块和电源的关系
中华测控网
万方数据
chinamca.tom
刍.
转向伺‘ 服电机‘
图4舵机控制电路
智能车在行驶过程中,舵机的响应时间对系统的稳定性尤 为重要,如果舵机足够灵敏,那么智能车的行驶轨迹将非常平 滑。但主办方提供的舵机响应速度有限,尤其是在寻迹连续S 弯时舵机响应有滞后。为了提高舵机的响应速度,我们采取了 四种方案:(1)直接用蓄电池7.2V的电压给舵机供电;(2) 将舵机在原位置上架高2.5cm,并使转臂加长至3.5cm,提高 舵机的传动比;(3)把其PWM波的频率从原来的50Hz提高 到100Hz,以减少舵机控制环节的延时;(4)合并两个8位 PWM寄存器为一个16位PWM寄存器,将舵机的PWM控制 周期放大至40000,从而细化PWM控制量,使转臂变化更加
as
sensors
was
introduced.The
employs
Frees-
bit single—chip microcomputer MC9S12XSl28
energizes the
its main controller and and
an
array of photoelectric
sensors
the
path and
speed
information from
sensors.Consequently,this intelligent vehicle results
can track
black--guide--line automatically the need of path
and well recognition and
・1 790・
计算机测量与控制
第1 8卷
如图2所示。
MC33886芯片并联的工作方式,以降低其工作时的导通电阻, 增强其驱动能力,从而有效地降低电机频繁的正反转时驱动芯
片的热程度。
2.4舵机控制模块设计 本系统中,舵机控制模块的控制对象是组委会提供的
SANWA SRMl02型舵机,该舵机可以输出力矩驱动智能车转
图1系统组成框图
工作过程:系统将传感器检测模块以及速度采集模块采 集到的路况信息、速度信息和小车状态信息等送以整个系统 的核心部分MC9S12XSl28进行分析处理,然后发出相应控 制命令输出到执行模块的电机和舵机执行适宜的速度和转向 动作,配以LcD和遥控器方便实时调试,进而实现整个系统 的闭环反馈控制。最终实现了智能车对路径的自动识别与
陲稠
文章编号:1671—4598【2010)08~1789一03