智能车培训软件设计
基于STM32智能车设计与实现本科毕业设计

基于STM32智能车设计与实现本科毕业设计本科毕业设计论文《基于STM32智能车设计与实现》摘要:随着科技的不断进步和应用的不断推广,智能车作为一种智能化、自动化的交通工具,越来越受到人们的关注。
本文以STM32为核心芯片,设计和实现了一辆智能车,并通过实验验证了车辆的性能和功能。
设计过程主要包括了硬件设计和软件设计两个方面。
在硬件设计方面,本文详细介绍了智能车的电路设计和传感器的选择和接口设计。
在软件设计方面,本文介绍了智能车的控制算法和实现方法。
通过对实验结果的分析,验证了智能车设计的可行性和有效性。
本文的研究成果对于智能车的发展和应用具有一定的参考价值。
关键词:STM32,智能车,硬件设计,软件设计,控制算法1.引言智能车作为一种重要的智能交通工具,具有广泛的应用前景和研究价值。
随着科技的不断进步和应用的不断推广,智能车的研究和应用变得越来越重要。
本文以STM32为核心芯片,设计和实现了一辆智能车,并通过实验验证了车辆的性能和功能。
2.设计原理和方法2.1硬件设计本文的智能车硬件设计包括电路设计和传感器的选择和接口设计。
首先,根据智能车的功能需求和性能要求,选择了适当的传感器并进行了接口设计。
然后,根据传感器的信号特点和STM32的特点,设计了电路图并制作了PCB板。
2.2软件设计本文的智能车软件设计主要包括控制算法的设计和实现方法。
首先,根据智能车的运动控制需求,设计了合适的控制算法。
然后,将控制算法实现在STM32的软件中,并通过编程实现智能车的自动控制功能。
3.实验结果与分析通过对智能车的性能和功能进行实验测试,得到了以下结果。
首先,智能车能够根据传感器的反馈信息进行自主导航和避障。
其次,智能车的运动轨迹准确且稳定,具有较好的控制性能。
最后,智能车的速度和灵敏度能够满足智能交通的需求。
通过对实验结果的分析,证明了智能车设计的可行性和有效性。
4.结论本文以STM32为核心芯片,设计和实现了一辆智能车,并通过实验验证了车辆的性能和功能。
《基于QT的智能无人战车人机交互软件设计》

《基于QT的智能无人战车人机交互软件设计》一、引言随着科技的飞速发展,智能无人战车在军事、救援、勘探等领域的应用越来越广泛。
其中,人机交互软件作为智能无人战车与操作人员之间的重要桥梁,其设计至关重要。
本文将详细阐述基于QT的智能无人战车人机交互软件设计,从设计思路、系统架构、关键技术、界面设计、数据交互等方面进行全面探讨。
二、设计思路基于QT的人机交互软件设计思路主要包括以下几点:首先,以满足用户需求为出发点,明确软件的主要功能;其次,结合QT框架进行软件架构设计,实现高效的人机交互;最后,确保软件的稳定性和可扩展性。
具体而言,设计思路如下:1. 需求分析:对智能无人战车的人机交互需求进行深入分析,明确软件应具备的功能,如远程控制、实时监控、数据传输等。
2. 架构设计:采用QT框架进行软件架构设计,实现多线程、跨平台的人机交互功能。
3. 交互设计:根据用户操作习惯和反馈需求,设计直观、易用的界面和操作方式。
4. 稳定性与扩展性:确保软件在各种环境下都能稳定运行,同时预留接口以支持后续功能扩展。
三、系统架构基于QT的智能无人战车人机交互软件架构主要包括以下几个部分:1. 用户界面层:负责与用户进行交互,包括显示战车状态、接收用户指令等。
2. 数据处理层:对战车采集的数据进行处理和分析,如图像识别、路径规划等。
3. 通信层:实现战车与用户之间的数据传输和通信。
4. 控制层:根据用户指令和数据处理结果,控制战车的行为和动作。
四、关键技术在智能无人战车人机交互软件设计中,涉及的关键技术包括:1. QT框架:利用QT框架实现跨平台的人机交互功能。
2. 数据处理技术:采用图像识别、路径规划等技术对战车采集的数据进行处理和分析。
3. 通信技术:实现战车与用户之间的数据传输和通信,确保数据的实时性和准确性。
4. 安全性技术:保障软件和数据的安全,防止非法访问和攻击。
五、界面设计界面设计是智能无人战车人机交互软件设计的关键环节。
智能语音小车软件毕业设计

4.第十周~第十一周 编程调试,整理并组织论文。
5.第十二周~第十四周 再次焊装调试,完成修改稿,定稿,打印,交评阅。
6.第十五周~第十六周 评阅与答辩。
四、主要参考书及参考资料
[1]谢宜人主编.单片机实用技术问答.北京:人民邮电出版社,2003年
[2]靳达.单片机应用系统开发实例导航.北京:人民邮电出版社,2003年
[3]流光斌等.单片机系统实用抗干扰技术.北京:人民邮电出版社,2004年
[4]余永权.ATMEL89系列单片机应用技术.北京:航空航天大学出版社,2002年
[5]陈瑾.智能小车运动控制系统的研究与实现[D].东南大学硕士论文,2005年
[6]韦巍.智能控制技术[M].北京:机械工业出版社,2000年
[7]蒋新松.机器人学导论[M].辽宁科学技术出版社,2003年
[8]孙迪生,王炎.机器人控制技术.北京:机械工业出版社,1997年
[9]陈明荧.8051单片机课程设计实训教材,清华大学出版社, 2003年
[10]蔡美琴等.MCS-51系列单片机系统及其应用.高等教育出版社, 2004年
[11]卓晴等编.学做智能车——挑战“飞思卡尔”杯.北京:航空航天大学出版社,2007年
[12]张阳编.MC9S12XS单片机原理及嵌入式系统开发.北京:电子工业出版社,2011年
[13]何此昂,周渡海等编著.Freescale 08系列:单片机开发与应用实例.北京:航空航天大学出版社,2009年
[14]王宜怀,曹金华 编著.嵌入式系统设计实战/基于飞思卡尔S12X微控制品.北京:航空航天大学出版社,2011
本文主要是以LD3320传感器作为语音识别模块,通过其内部语音识别程序,对其接收到的语音命令,输出相应的信号。以16位飞思卡尔单片机MC9S12XS128微处理器为控制核心,处理接收的信号,使小车按照命令要求,实现不同动作。
智慧驾培管理系统建设方案

加强与政府部门、 企业和其他培训机 构的合作,拓展业 务范围和影响力
持续收集用户反馈, 不断优化系统功能 和体验,提高用户 满意度和忠诚度
数据挖掘:利用大数据技术,分 析学员驾驶行为、学习进度等数 据,为学员提供个性化的教学方
案
A
合作发展:与汽车厂商、保险公 司等合作,为学员提供购车优惠、
保险优惠等增值服务
,A CLICK TO UNLIMITED POSSIBILITES
汇报人:
目录
CONTENTS
定义:智慧驾培管理系统是一 种利用现代信息技术,实现驾 驶培训全过程智能化、信息化
的管理系统。
目标:提高驾驶培训质量和效 率,降低培训成本,保障学员 和教练员的权益,促进驾驶培
训行业的健康发展。
功能:包括学员管理、教练管 理、培训过程管理、考试管理、
实施与运维方案 的目标:确保系 统稳定运行,提 高服务质量和用 户满意度
实施与运维方案 的关键:建立完 善的管理制度和 流程,明确职责 分工,加强团队 协作和沟通
增加新的培训课程 和考试项目,满足 不断变化的市场需 求
优化系统架构,提 高系统的稳定性和 性能
引入大数据和人工 智能技术,实现智 能教学和个性化学 习
软件系统: 包括管理系 统、教学系 统、考试系 统等
数据中心: 存储和管理 学员信息、 教学数据、 考试数据等
网络连接: 实现硬件设 备、软件系 统、数据中 心之间的数 据传输和通 信
安全措施: 包括数据加 密、访问控 制、防火墙 等,确保系 统安全可靠
建设目标:实现驾校信息化管理,提 高工作效率
03
数据处理:采用大数据处理技术,如 Spark或Flink,对数据进行实时分析 和处理
(完整版)智能小车本科毕业设计

摘要随着社会各行各业的迅速发展,根据人类的需求出现了各种各样的智能机器人、智能车。
智能小车又称为移动式机器人,是一个多种高新技术的集成体,它融合了机械、电子、传感器、计算机硬件、软件、人工智能等许多学科的知识,伴着我国科学技术的进步,智能化和自动化技术越来越普及,各种高科技也广泛应用于智能车等制造领域,使智能车越来越多样化。
根据不同的需求便出现了各种功能的智能小车。
本设计是以AT89C52单片机为核心的智能车的设计,系统主要由红外检测模块、单片机最小系统模块、电机控制模块、电源模块组成。
其中电源模块由四节1.5V电池组成,经过7805稳压电路输出5V的稳定电压;红外检测模块包括两只红外反射式对管TCRT5000;最小系统模块主要包括AT89C52单片机和其外围电路;电机模块包括两个减速直流电机及其附属减速箱和两个电机驱动控制芯片L298N。
软件部分由C语言编程,实现对各部分的处理和控制。
该智能车可以实现自动避障、避障的功能。
整个系统结构简单,运行高效。
关键词:智能小车避障 AT89C52 L298N电机驱动AbstractWith the rapid development of all sectors of society, based on needs emergence of a variety of intelligent robots, intelligent vehicles. Smart car, also known as mobile robots, is a multi-tech integrated body, which combines mechanical, electronics, sensors, computer technology is becoming increasingly popular, is also widely used in various the needs of the various functions will appear smart car.The design is based on AT89C52 microcontroller as the core of the intelligent vehicle design, the system mainly consists of infrared detection module, the smallest single-chip system module, motor control module, power module. Wherein the power supply module consists of four 1.5V batteries composed after 7805 5V regulator circuit output stable voltage; infrared detector module includes two infrared reflective of the tube TCRT5000; minimum system module includes AT89C52 microcontroller and its peripheral circuits; motor module includes two DC motors and its subsidiary reducer gearbox and two motor drive control chip L298N. Software part by the C programming language, to achieve the various parts of the processing and control. The smart car can automatically avoid obstacles, obstacle avoidance function. The whole system is simple, efficient operation.Key words:Intelligent car Obstacle avoidance Remote control AT89C52目录目录 (i)前言 (1)1绪论 (2)1.1 智能小车的研究现状及发展趋势 (2)1.1.1 智能小车的研究现状 (2)1.1.2 智能小车的发展趋势 (2)1.2 本文的结构 (3)2 系统总体方案设计 (5)2.1 系统各部分设计方案 (5)2.1.1 单片机型号的选定 (5)2.1.2 直流电机驱动芯片的选定 (5)2.1.3 红外对管的选定 (8)2.2 总体方案设计 (8)2.3 智能小车的基本介绍 (9)2.3.1 智能小车的基本结构 (9)2.3.2智能小车的基本功能及原理 (10)3硬件设计 (10)3.1系统硬件结构图 (10)3.2 单片机主控单元的设计 (11)3.2.1 单片机引脚说明 (11)3.2.2 AT89C52最小系统设计 (16)3.3红外检测单元设计 (17)3.4 电机驱动单元设计 (21)3.5 系统总体原理图 (22)3.6 硬件抗干扰设计 (23)3.6.1 电源干扰的抑制 (23)3.6.2 信号通道干扰的抑制 (23)4系统软件设计 (25)4.1主程序设计 (25)4.2 红外检测模块程序设计 (26)4.3 电机驱动模块程序设计 ...................................... 错误!未定义书签。
智能车毕业设计范文
智能车毕业设计范文一、引言随着科技的不断发展,智能交通系统已经逐渐成为实现交通安全和效率的重要手段之一、智能车作为智能交通系统的重要组成部分,具有自主导航、智能控制和自动执行等功能。
本文将介绍一个智能车毕业设计方案,旨在设计一款具有智能导航和避障功能的智能车。
二、设计方案1.系统框架该智能车系统由硬件和软件两部分组成。
硬件部分包括车体、传感器、控制器等,软件部分包括导航算法、避障算法等。
2.硬件设计智能车的车体由底盘、轮子和电机组成。
底盘采用轻质材料制造,轮子与电机可以实现自由转动和方向控制。
车体内部集成了传感器,包括激光雷达、摄像头和超声波传感器等。
控制器是智能车的核心部件,负责接收传感器数据、进行信息处理和控制车体行动。
控制器应具备高性能的处理器和丰富的通信接口,以满足复杂的算法运算和数据收发要求。
3.软件设计智能车的软件部分主要包括导航算法和避障算法。
导航算法是智能车实现自主导航的关键。
该算法应能根据车体当前位置和目标位置,通过传感器数据判断前方道路情况,并制定合适的行进路线。
避障算法是智能车避免碰撞的重要手段。
该算法应利用激光雷达、摄像头和超声波传感器等数据,识别周围的障碍物,并及时采取措施避免与障碍物发生碰撞。
4.实施计划该智能车的实施计划可以分为以下几个步骤:(1)搭建智能车的硬件平台,包括底盘、轮子、电机和传感器等。
(2)编写控制器的驱动程序,实现车体的基本动作控制。
(3)编写传感器数据采集与处理程序,获取传感器数据并进行处理。
(4)设计导航算法,实现智能车的自主导航功能。
(5)设计避障算法,实现智能车的避障功能。
(6)测试和调试智能车系统,不断优化算法和性能。
三、结论本文提出了一种智能车毕业设计方案,旨在设计一款具有智能导航和避障功能的智能车。
该方案通过硬件和软件的结合,实现了智能车的基本动作控制、传感器数据采集与处理、导航算法和避障算法的设计与实现。
这一方案有助于提高交通安全和效率,具有一定的实用性和推广价值。
基于机器视觉的移动捡球智能车的软件设计

1 项目背景在各种球类运动中,我们总是需要不断的捡球、放球,这一枯燥无味的工作将浪费很多精力和时间。
这段时间对于运动员来说是无谓的损失,不仅会影响运动员的训练效率、还会消磨运动员的训练耐心。
而目前市场上还没有成熟的自动捡球设备,体育场内散落在地上的球一般都是使用者捡起或是场馆内安排有专业的捡球人员,造成了无谓的时间和人力的浪费。
本套设备能够自动识别小球的位置,然后自动抓取、收集并最后将小球置于目标位置。
项目旨在能够在网球场实现网球的自动清场功能,解放球员压力。
网球服务机器人有着较为广阔的发展前景,所以项目有一定的研究意义和推广价值[2][3]。
2 整体介绍2.1 外观介绍一个由麦克纳姆轮四轮驱动的小车上安装有一个六自由度机械手臂,通过机械手臂实现小球的抓取和放置功能,智能车前端有摄像头,可以对球体进行识别,小车总重量不超过10kg,长约260mm,宽约230mm。
本项目可实现对于乒乓球、高尔夫球等球的识别和抓取,并可实现多个小球的同时抓取,以提高效率。
整个智能车我们分成了三层,用亚克力板隔开。
最下层为小车驱动部分,小车为四驱动型,使用麦克纳姆轮,小车的电池固定在小车下方。
当中为小车的控制层,使用4根铜柱撑起亚克力板,小车的控制板为arduino板。
最上层为机械臂层,机械臂和控制机械臂的arduino板以及树莓派都在这一层。
2.2 麦克纳姆轮小车智能小车使用的是全向移动的麦克纳姆轮,这种全方位移动方式是基于一个有许多位于机轮周边的轮轴的中心轮的原理上,这些成角度的周边轮轴把一部分的机轮转向力转化到一个机轮法向力上面。
依靠各自机轮的方向和速度,这些力的最终合成在任何要求的方向上产生一个合力矢量从而保证了这个平台在最终的合力矢量的方向上能自由地移袭动,而不改百变机轮自身的方向。
在它的轮缘上斜向分布着许多小滚子,故轮子可以横向滑移。
小滚子的母线很特殊,当轮子绕着固定的轮心轴转动时,各个小滚子的包络线为圆度柱面,所以该轮能够连续地向前滚动。
机器人智能小车制作与编程
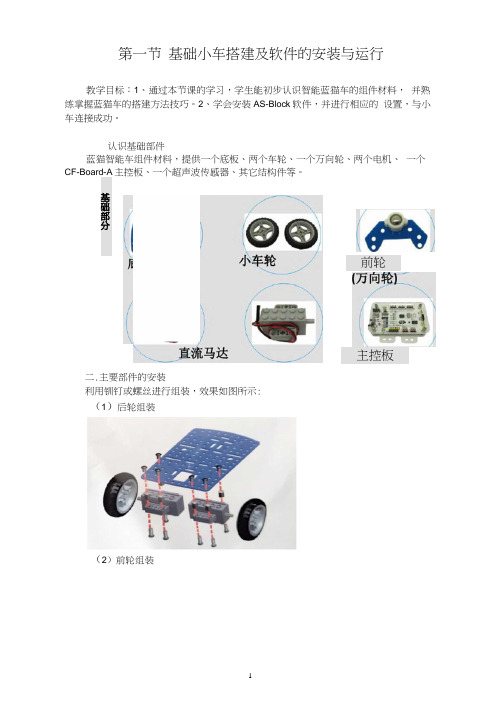
第一节基础小车搭建及软件的安装与运行教学目标:1、通过本节课的学习,学生能初步认识智能蓝猫车的组件材料,并熟练掌握蓝猫车的搭建方法技巧。
2、学会安装AS-Block软件,并进行相应的设置,与小车连接成功。
认识基础部件蓝猫智能车组件材料,提供一个底板、两个车轮、一个万向轮、两个电机、一个CF-Board-A主控板、一个超声波传感器、其它结构件等。
二.主要部件的安装利用钏钉或螺丝进行组装,效果如图所示: (1)后轮组装前轮主控板基础部分(2)前轮组装(3)主板安装左电机连接线插入-Ml (D5 D7)右电机连接线插入一M2 (D6D8)左边直流电机数据线连接在主控板上标有“左电机”的Ml端口,右边直流电机数据线连接在主控板上标有“右电机”的M2端口,注意黑线插在涂黑圈的针脚上,干万别接错了哦!三、AS・Block软件说明AS-Block是山江苏趣创信息技术有限公司(创趣天地-CFunWorld)基于Scratch 2.0和Arduino进行深度二次开发,推岀的一款适合青少年学习的编程软件。
Scratch是由麻省理工学院(MIT)设计开发的一款简易的编程工具。
针对孩子们的认知水平,以及对于界面的喜好,MIT做了相当深入研究和颇具针对性的设计开发。
不仅易于孩子们使用,乂能寓教于怎培养孩子们的创新能力,让孩子们获得创作中的乐趣。
AS-Block充分继承Scratch 软件的优点:使用者可以没有编程基础,也可以不会使用键盘。
构成scratch程序的命令和参数通过积木形状模块来实现。
用鼠标拖动模块到程序编辑栏即可。
右边是编辑好的程序代码,中间是可以用来选择的功能模块,左边上部是程序预览和运行窗口,左边下部是角色窗口,清晰明确的布局具有相当好的操作体验。
AS-Block 乂充分结合Arduino 概念增加了丰富的硬件积木编程模块(例如获取环境温度、房间光强,控制灯光闪烁、电机旋转、机器人控制等),使用者可以简单的通过这些模块开发出更具创意趣味和实用价值的系统。
缩微智能车软件系统设计与实现

缩微智能车软件 系统设计 与实现
毕 建权 ~ , 陆 耿 , 王京春 , 江永 亨
BI J i a nqu a n 一 , LU Ge ng , W ANG J i ng c h un , J I AN G Yo ng he ng
Ke y wo r d s :s o twa f r e a r c h i t e c t u r e ; a u t o n o mo u s d r i v i n g ; ma c h i n e v i s i o n; v e h i c l e c o n t r o l
Co mp u t e r E n g i n e e r i n g a n d Ap p l i c a t i o n s , 2 0 1 3 , 4 9 ( 1 ) : 2 3 4 - 2 3 8 .
Ab s t r a c t :T h i s p a p e r i n t r o d u c e s a s o t f wa r e s ys t e m f o r t h e a u t o n o mo u s mi c r o — v e h i c l e s b a s e d o n s i mp l e v i s u a l a n d a u d i t o r y s e n s o r s , wh i c h ma k e s t h e mi c r o — v e h i c l e s a u t o n o mo u s d r i v i n g u n d e r t h e mi c r o — g e o me t r i c t r a ic f e n v i r o n me n t . Th e v e hi c l e’ S s o twa f r e
电磁智能车软件系统的设计与实现

3车模 控 制算 法 .
车模控制 系统是一个参数不定 的系统 . 一辆具有智 能化 的赛 车必 须能够根据赛道 的特征将参数调整到最佳 . 以实现最优控制。 2车道检测算法 . 31 . 电机速度控制算法 21 .重心算法 3 .不 同赛段车速给定值 .1 1 本 车模采用双排 电感感应磁 场 . 每排 4 . 8 电感 均匀布 置 个 共 路。 根 据 df i值来 修改我们 的 目 标速度 : 在长度 为 2c 4m的碳纤维杆上 . 调理电路 固定在底盘上 . 两者通过屏 蔽 st ds e et e pe d nm x ed (d ‘( asedmn ed) () = a pe- ( ) m x e— ipe ) 7 s p s ; 线相连。 在比 中. 赛 智能车需要通过直道、 弯道 和 s弯等各种 复杂赛 段 , 为 () 1 首先对小车每个传感器的距 离车身 中轴线的距离进行确定 保证车体能快速稳定 的完 成比赛 . 必须精确控制 车速 , 在不 同的赛 段 a .[]{1.,i.,4- ,,,1 ,1 1 /_ 8=- 8- 8- ,4441. 1. ; fx 1 1 8 8 设置不同的 目 标车速 速度控制策略是车模在满足一定寻迹精度的前 () 2 接着将小车前排传感 器采集到 的信号进行 归一化处理 , 出 提下尽可能提高车速 . 证智能车直道速度 的同时 . 得 保 能在入 弯时迅速 每组传感器测 得电压归一化后的数值(— 5 ) 0 2 5 存人 A _ D t i D w a [; a] 减至给定的速度以平稳人弯 。 () 3 再将两者相乘 , 求连加之后的和 sm y ; u x1 312车速 P .. D控制
◇高教 论述◇
科技 一向导
21 年 2 期 02 第 0
2024年autoform培训教程

材料属性设置与仿真参数配置
材料属性设置
在autoform的材料库中选 择合适的塑料材料,设置 其密度、弹性模量、泊松 比等物理属性。
2024/2/28
仿真参数配置
根据塑料件的成型工艺和 仿真需求,设置合适的仿 真参数,如温度、压力、 时间等。
边界条件与约束
定义塑料件的边界条件和 约束,如固定支撑、对称 边界等,以确保仿真的准 确性和可靠性。
autoform实战案例和 最佳实践:通过实战 案例和最佳实践,让 学员更好地掌握 autoform的应用和技 巧。
2024/2/28
5
02 autoform软件基础
2024/2/28
6
软件安装与启动
2024/2/28
安装步骤
下载autoform安装包,解压后运 行安装程序,按照提示完成安装 过程。
高级材料模型
提供多种高级材料模型,如弹塑性、超弹性、粘塑性等,以更精确 地模拟材料的力学行为。
接触与摩擦模拟
能够精确模拟成形过程中工具与工件之间的接触和摩擦行为,提高仿 真的准确性。
2024/2/28
23
多物理场耦合分析
1
热力耦合分析
支持热力耦合仿真,考虑温度对材料性能和成形 过程的影响,提供更准确的预测结果。
autoform使用方法和 技巧:详细讲解 autoform的使用方法 和技巧,包括如何定 义表单元素、如何设 置表单布局、如何进 行表单验证等。
autoform高级功能和 应用:介绍autoform 的高级功能和应用, 包括自定义表单元素 、动态表单、表单联 动等。
autoform与后端数据 交互:讲解autoform 如何与后端数据进行 交互,包括数据请求 、数据响应、数据处 理等。
基于Matlab的智能车软件系统设计与仿真

0 引 言
质 的 提 升 。 在控 制算法上 ,采用改进 型的 PID算法对 电机 进行 闭环 反
第 31卷 第 1期 2014年 1月
计 算机应 用 与软件
Computer Applications and Software
Vo1.31 No.1 Jan.2014
基 于 Matlab的智 能 车 软 件 系统 设 计 与仿 真
严大考 李 猛 郭朋彦 张瑞珠
(华北水 利水 电学 院机械学 院 河南 郑州 450045)
在 核 心 控 制 器 的 选 择 上 ,采 用 了 32 位 单 片 机 MK60X256VLQ100作为核心控制器 ,相较 以往使用 的 16位单 片 机 ,具有无与伦 比的兼容性 、可扩 展性和低 功耗 灵活性 ,有效地 提升 了系 统 的 处 理 速 度 和 实 时 性 。其 特 有 的 DMA 模 块 与 CMOS摄像 头 的完美结合 ,对赛 道信息 采集 的同时也 能对其进 行 处理 ,提高 了图像的处理速度与采集质量 。
era,extracts the black 1ines on both sides of the path using edge detection method,and then calculates the centre line SO that the small car
can fast and stably move forward along the centre line.On this basis,we control the motor and servo by using the advanced PID control algo—
《基于QT的智能无人战车人机交互软件设计》
《基于QT的智能无人战车人机交互软件设计》一、引言随着科技的飞速发展,智能无人战车在军事、救援、勘探等领域的应用越来越广泛。
为了实现智能无人战车的有效控制和操作,人机交互软件的设计显得尤为重要。
本文将介绍基于QT框架的智能无人战车人机交互软件设计,旨在提高战车的操作便捷性、实时性和智能化水平。
二、软件设计概述本软件设计采用QT框架,以C++作为主要开发语言,结合图形界面和交互式操作,实现智能无人战车的人机交互功能。
软件设计主要包括以下几个部分:界面设计、交互逻辑设计、通信协议设计以及算法优化。
三、界面设计界面设计是软件设计的重要组成部分,直接影响到用户的使用体验。
本软件采用QT的Widget和QML等工具,设计出直观、友好的图形界面。
界面包括主控制界面、战车状态显示界面、任务规划界面等。
主控制界面用于显示战车的实时视频、控制战车的行动;战车状态显示界面用于展示战车的各项参数和状态;任务规划界面用于设定战车的行动路线和任务。
四、交互逻辑设计交互逻辑设计是实现人机交互功能的核心。
本软件通过QT 的信号与槽机制,实现用户操作与战车行为的对应关系。
用户通过界面上的按钮、滑块等控件,发送控制指令,软件根据指令和战车的实时状态,通过算法计算出战车的行动策略,并发送给战车执行。
同时,软件还能实时显示战车的状态和任务完成情况,使用户能够了解战车的运行状况。
五、通信协议设计通信协议是智能无人战车与人机交互软件之间的桥梁。
本软件采用TCP/IP协议,实现与战车之间的数据传输。
通信协议包括数据格式、数据传输速率、数据校验等方面。
通过合理的通信协议设计,保证数据传输的稳定性和可靠性,从而实现人机交互的实时性和准确性。
六、算法优化算法优化是提高软件性能的关键。
本软件采用多种优化算法,包括路径规划算法、目标跟踪算法、图像处理算法等。
通过优化算法,提高战车在复杂环境下的自主导航能力、目标识别能力和任务执行能力。
同时,通过对软件的性能进行测试和调优,保证软件的运行效率和稳定性。
基于Android的嵌入式视频智能车的软件设计

基于Android的嵌入式视频智能车的软件设计王林;段廷瑞;顾士豪【摘要】The software used for remote control of embedded video intelligent car through the Android mobile device was designed. It includes two parts. One part runs on MCU and the other part runs on Android platform. The Android mobile device communicated with intelligent car and the network camera through WIFI as a client. The system can fulfill many tasks such as controlling the car,re-al-time and multi-angle monitoring,photographing and recognizing color. Experiments show that the software is functional and reliable. It is suitable for video monitoring field under the special environment.%设计了一种通过Android移动设备来远程控制嵌入式视频智能车的软件系统,包括单片机软件和Android平台软件两部分。
Android移动设备作为客户端通过WIFI方式与搭载有WIFI服务器的小车和网络摄像头通信,能完成控制车体行进、多角度实时画面监控、拍照和颜色识别等多项任务。
测试表明,该系统功能完善可靠,适用于特殊环境下的视频监控领域。
【期刊名称】《河南工程学院学报(自然科学版)》【年(卷),期】2014(000)004【总页数】4页(P55-58)【关键词】Android;WIFI;嵌入式视频智能车【作者】王林;段廷瑞;顾士豪【作者单位】安徽电子信息职业技术学院软件学院,安徽蚌埠233000;安徽电子信息职业技术学院软件学院,安徽蚌埠233000;安徽电子信息职业技术学院软件学院,安徽蚌埠233000【正文语种】中文【中图分类】TP368视频监控系统通常被应用在小区安防、道路监控等领域,但由于安装的位置相对固定,即使通过远程云台控制技术也只能达到有限的监控可视区域.嵌入式视频智能车搭载WIFI服务器、网络摄像头和四轮底盘,可无线通信和远程控制,具有很强的移动性和灵活性,从而减少了复杂环境给监控系统带来的局限.采用装有Android系统的移动设备作为远程控制端,使用方便且极大地降低了系统成本.因此,设计开发使用Android设备来远程控制嵌入式视频智能车的软件具有较高的实用价值.嵌入式视频智能车的系统框架如图1所示.小车采用IAP15F2K61S2单片机为核心芯片,WIFI无线模块的型号为USR-WIFI232-B,支持802.11 b/g/n无线标准,直接连接到单片机的串口,被配置成WIFI服务器使用.单片机只需对串口进行读写就可以通过无线网络与外界进行通信,它还负责控制底盘上的四轮电机与光电寻迹、测距、光强度等各种传感器模块.网络摄像头的型号为T6836WP PnP,通过固件的配置,上电后自动与WIFI服务器连接.嵌入式视频智能车的软件系统包括单片机软件和Android平台软件两部分.系统工作时,Android设备作为客户端连接上WIFI服务器,通过WIFI网络与小车和网络摄像头之间进行数据通信.Android设备和小车之间制订了一套完备的通信协议,其中Android设备发送给小车的远程控制命令如表1所示,小车传感器采集到的各种数据及状态信息以表2所示的格式发回给Android设备.单片机软件采用C语言开发,开发环境为Keil uVision 4.软件先完成对单片机和各类传感器的初始化,之后进入一个大的无限循环.在循环语句中,循环接收远程的控制命令,再通过switch-case语句识别命令完成对应的各种任务如前进、后退、左转、右转等,同时把传感器采集到的数据和小车的状态信息通过串口发送到WIFI网络中,供远程的Android设备接收[1].3.1 Android系统及开发环境Android平台软件作为上位机远程控制端,是基于Google公司推出的新版本移动智能操作系统Android 4.4平台开发的.相对于其他低版本的Android操作系统,Android 4.4版本加强了对低端设备的优化支持,软件开发环境采用Eclipse+ADT,ADT是Google公司推出的基于Eclipse并且整合Android SDK的集成开发工具包[2].3.2 Android软件框架Android软件作为客户端连接到WIFI服务器,主要包括WIFI连接模块、Socket 通信模块、功能处理模块和用户界面(以下简称UI)模块,软件总体设计框图如图2所示.Socket通信有两种方式,面向连接的TCP方式和无连接的UDP方式[3].在这里采用无连接的方式能提高效率,适合大数据量的传输.功能处理模块主要包括车体行进控制、摄像头云台控制、小车数据信息返回和实时图像传输4个部分,它们的实现采用了多线程编程技术且都需要通过Socket通信在小车和Android设备之间进行信息的交互.3.3 模块详细设计3.3.1 WIFI连接Android设备可以手动连接WIFI,也可实现程序启动后自动连接WIFI,实现代码如下:WifiConfiguration wcg =mWifiAdmin.createWifiInfo("Wifiname","password").WIFI服务器的IP地址为192.168.6.254,端口号为60 000.Android设备连接后通过DHCP自动分配到一个IP地址,实现代码如下:DhcpInfo dhcpInfo = wifiManager.getDhcpInfo();ip = Formatter.formatIpAddress(dhcpInfo.gateway);建立Socket并启动通信线程的实现代码如下:serverAddress = InetAddress.getByName("192.168.6.254");socket = new Socket(serverAddress, 60 000);commsThread = new CommsThread(socket, UIupdater); commsThread.start().网络摄像头在上电后会自动连接WIFI,在程序中判断网络摄像头是否连接WIFI 成功,若失败则弹出提示信息并退出程序.3.3.2 摄像头的控制网络摄像头的控制包括实时画面的传输显示以及云台的控制,程序启动时首先加载必要的函数库,代码如下:System.loadLibrary("ffmpeg");System.loadLibrary("object_jni");System.loadLibrary("avi_utils").监控图像数据的处理使用了已移植到Android系统的开源FFmpeg方案,它提供了一套完整的流媒体音视频录制、转换和编解码的解决方案[4].摄像头的实时监控图像数据通过已建立的Socket通道传输至远程Android设备.摄像头的云台控制主要基于厂商提供的底层库libP2PAPI.so并进行二次开发,底层库在程序启动时已自动加载.它提供的接口函数被封装在NativeCaller.java文件中,程序通过调用接口函数来实现各种控制功能如云台的左转,调用代码如下:NativeCaller.PPPPPTZControl(strDID,ContentCommon.CMD_PTZ_RIGHT). 实现云台的精确定位转动需启用预置位功能,通过预置位的设置可以方便地将摄像头旋转到指定位置.云台最多可设置15个预置位,可在水平270°、垂直90°的范围内转动.调用预置位0(如左转25°)的示例:NativeCaller.PPPPPTZControl(strDID,ContentCommon.CMD_PTZ_PREFAB_B IT_RUN0).3.3.3 拍照与颜色识别拍照功能的实现只需直接保存屏幕当前画面即可,可设定保存格式为PNG,保存位置为SD存储卡,部分实现代码如下:File file = new File(Environment.getExternalStorageDirectory(),strFileName); file.createNewFile();FileOutputStream fos=new FileOutputStream(file);press(pressFormat.PNG, 80, fos); ∥b是已定义的Bitmap. 软件还可以对屏幕当前的画面进行大致的颜色识别,其原理为依次分析图像中各像素点的RGB值并与内部可识别RGB值的相似程度进行比较.设定合适的阈值过滤其他颜色,并且累加符合标准的颜色,最后通过各颜色点累加数目的大小来确定实际颜色.以红色像素点的计算为例,代码如下:for(int i=0;i<width;i++){for(int j=0;j<height;j++){int pixel=mBmp.getPixel(i,j);int r=(pixel>>16)&0xff;int g=(pixel>>8)&0xff;int b=pixel&0xff;if(Math.sqrt((r-r1)*(r-r1)+(b-b1)*(b-b1)+(g-g1)*(g-g1))<10.0)redNum++; }}3.3.4 UI设计UI模块使用XML文件进行界面布局,在系统主界面中,采用横屏显示和悬浮方式将控制按钮和实时图像接收布局融合到一起.横屏显示的实现方式有两种:(1)在AndroidManifest.xml中加入代码:<activity android:name="myAcitivty"android:screenOrientation="landscape" />.(2)使用程序代码:setRequestedOrientation(ActivityInfo.SCREEN_ORIENTATION_LANDSCAPE). 为了增强显示效果,在显示界面中还可加入抽屉效果,在XML布局文件中设置SlidingDrawing抽屉控件,然后在代码中建立对应的activity类.在实际测试中,打开小车和网络摄像头的电源,网络摄像头会自动搜索并连接到WIFI服务器.下载并安装Android软件到移动设备,手动连接WIFI服务器后启动软件.摄像头监控到的实时画面会传输到Android设备的屏幕上,通过点击软件界面上的操控按钮可以控制小车的行进及云台的转动,软件接收到小车返回的传感器数据和抓拍的图片也会存储在Android设备中.采用Android设备和WIFI通信对嵌入式视频智能车进行远程控制的方式操作简单、成本低.车体的灵活移动和摄像头云台的自由转动,减少了监控环境和监控范围的局限性.本研究所设计的单片机软件和Android平台软件通过自定义协议进行通信,共同完成了控制小车行进、接收小车数据和状态、监控实时画面、控制摄像头云台以及拍照等诸多功能,为其他类似的应用设计提供了参考,后续可考虑在系统中增加录像存储、录音等更多的实用功能.【相关文献】[1] 朱丹峰,葛主冉,林晓雷.基于Android平台的无线遥控智能小车[J].电子器件,2013,36(3):408-412.[2] 郭宏志.Android应用开发详解[M].北京:电子工业出版社,2010:13-16.[3] 魏崇毓,张菲菲.基于Android平台的视频监控系统设计[J].计算机工程,2012,38(14):214-216.[4] 李向军,张小菲,王书阵.一种基于Android平台的移动终端多媒体播放器的扩展设计[J].微电子学与计算机,2014,31(2):118-121.。
2024年汽车软件培训资料
3
建议汽车企业加强与软件企业的合作,共同推动 汽车软件领域的发展和创新,提升整个行业的水 平和竞争力。
THANKS
感谢观看
。
汽车软件开发流程
详细介绍了汽车软件的开发流程,包 括需求分析、设计、编码、测试和集 成等阶段。
汽车软件新技术应用
介绍了人工智能、大数据、云计算等 新技术在汽车软件领域的应用和前景 。
学员心得体会分享交流环节
01
学员表示通过本次培训,对汽车软件领域有了更深入的了解和 认识,掌握了基本的开发技能和方法。
04
典型案例分析:成功与失败经验分享
成功案例介绍及经验总结
案例一
特斯拉自动驾驶软件
案例二
CarPlay车载信息娱乐系统
成功经验
特斯拉通过大规模的数据收集和深度学习算法训 练,实现了高度自动化的驾驶体验。其成功的关 键在于持续的技术创新和数据驱动的开发策略。
成功经验
Apple的CarPlay系统通过简洁直观的用户界面和 丰富的应用生态,为车主提供了便捷的车载信息 娱乐体验。其成功的关键在于优秀的用户体验和 广泛的硬件兼容性。
05
汽车软件安全性与可靠性保障措施
安全漏洞防范策略
漏洞扫描与评估
定期使用专业的漏洞扫描工具对汽车软件进行全面的安全漏洞扫 描,及时发现潜在的安全风险。
代码审计与加固
对关键代码进行定期审计,确保代码质量,同时采用代码混淆、 加密等技术手段提高软件安全性。
入侵检测与防御
部署入侵检测系统,实时监测网络攻击行为,及时响应并处置安 全事件。
制定完善的数据备份计划 ,定期对重要数据进行备 份,确保数据安全。
灾难恢复预案
建立灾难恢复预案,明确 数据恢复流程和责任人, 以便在发生意外情况时迅 速恢复数据。
智能车辆设计软件开发方案

智能车辆设计软件开发方案项目背景随着智能交通的发展,智能车辆已经成为未来汽车行业的新趋势。
这些车辆不仅需要具备自动驾驶的能力,还需要具备较高的安全性、稳定性和智能化程度。
因此,智能车辆设计软件的开发变得尤为重要。
目前,市场上已经存在了一些智能车辆设计软件,但是这些软件普遍存在功能不够全面、使用难度较大、部署效率较低等问题。
因此,我们需要开发一款全面、易用性较高的智能车辆设计软件。
开发方案在开发智能车辆设计软件前,我们需要明确软件的功能和使用方式。
下面是本项目的具体开发方案。
功能设计智能车辆设计软件需要具备以下基础功能:1.车辆模型设计:软件可以根据用户设定的参数,快速生成车辆的几何模型。
2.车辆动力学仿真:软件可以对车辆进行动力学仿真,模拟车辆行驶过程中的各种因素及其影响。
3.自动驾驶:软件可以通过对车辆模型和动力学仿真结果的分析,生成控制算法,实现车辆的自动驾驶。
4.可视化界面设计:软件需要提供直观友好的用户界面,使用户可以轻松地设计车辆、进行仿真、调试控制算法等操作。
此外,我们考虑加入以下高级功能:5.基于云计算的优化:我们可以将车辆模型和控制算法上传至云端,构建大规模仿真平台,并利用大数据技术对数据进行深度挖掘,从而实现智能优化。
6.自学习算法:我们可以通过机器学习技术,对车辆的行驶数据进行分析,学习车辆行驶规律,并根据规律进行控制优化。
技术选型为了实现上述功能,我们需要选择以下技术:1.车辆模型设计:我们可以使用SolidWorks、CATIA等3D建模软件来设计车辆模型。
2.车辆动力学仿真:我们可以使用CarSim、ADAMS等仿真软件,并借助MATLAB等分析工具进行数据分析。
3.自动驾驶:我们可以使用ROS、OpenCV等开源框架来实现车辆的自动驾驶功能。
4.可视化界面设计:我们可以使用Qt等GUI工具包,编写跨平台的可视化界面。
5.基于云计算的优化:我们可以使用Amazon Web Services(AWS)、Microsoft Azure等云计算平台。
智能车建模与仿真软件设计的开题报告

智能车建模与仿真软件设计的开题报告一、项目背景智能车是一种能够自主行驶的小型车辆,其具有自主感知、决策、控制等能力。
由于其能够减轻人类的驾驶负担,提高交通安全性和效率,智能车技术在现代交通领域得到了广泛应用和发展。
在智能车的发展过程中,模型和仿真技术是必不可少的工具,能够帮助研究者快速验证理论设计和优化参数选择。
二、项目目的针对现有的智能车建模和仿真软件存在的问题,例如模型不真实、仿真效率低等,本项目旨在设计一款高效、精准、易用的智能车建模和仿真软件,满足智能车研究者的需求。
三、项目内容本项目主要包括以下几个方面:1. 智能车建模:通过建立真实、可靠的智能车模型,有效地描述智能车的特征和行驶行为。
2. 仿真环境设计:设计包括车辆控制系统、虚拟环境、仿真算法等在内的仿真环境,使得用户能够进行真实、准确的仿真实验。
3. 软件优化与展示:优化仿真算法,提高仿真效率,同时设计用户友好的界面和视觉效果,使得用户能够方便地观察仿真结果,进行仿真调试和参数优化。
四、项目计划本项目计划分为以下几个阶段:1. 前期调研:对现有的智能车建模和仿真软件进行调研,分析现有问题和市场需求,确定自己的软件设计方向。
2. 智能车建模:基于前期调研的结果,建立真实、可靠的智能车模型。
3. 仿真环境设计:设计包括车辆控制系统、虚拟环境、仿真算法等在内的仿真环境,实现智能车在不同环境下的行驶和交互。
4. 软件优化与展示:通过优化仿真算法、设计用户友好的界面和视觉效果等手段,提高软件的使用效率和用户体验,完善软件功能和界面。
5. 软件测试和上线:对软件进行全面测试和评估,确保软件的稳定性和可用性,并上线发布。
五、项目意义本项目能够为智能车研究者提供一款高效、准确、易用的智能车建模和仿真软件,有效地推动智能车技术的发展与应用。
同时,本项目也能为学生学习智能车相关知识提供一个良好的学习平台。
基于S12微控制器智能车的软件设计

第30卷第2期苏 州 大 学 学 报(工 科 版)Vol 130No.22010年4月JOUR NAL OF S UZHOU UN I V ERSITY (ENGI NEER I N G SC I ENCE E D ITI ON )Ap r .2010收稿日期作者简介李秀娟(),女,副教授,主要研究方向为自动控制、电力电子传动。
项目基金安徽省教育厅自然科学研究资助项目(编号K B );合肥学院自然科学研究资助项目(编号665)。
文章编号:1673-047X (2010)-02-0019-05基于S12微控制器智能车的软件设计李秀娟,刘 伟,黄心伟(合肥学院电子信息与电气工程系,安微合肥230601)摘 要:以9S12XS128为控制核心,采用“弦切法”对路径状况进行分析优化处理,通过建立模糊规则库调整智能车电机转速与舵机转角的匹配,利用P I D 算法完成对舵机的控制。
设计并制作出能以较快速度自主识别各种赛道轨迹的智能车。
实验及大赛结果表明本设计可以优化路径选择,提高舵机响应速度,同时使小车在弯道处速度平滑稳定。
关键词:智能车设计;P I D 控制;弦切法中图分类号:TP368.1 文献标识码:A0 引 言智能车(I nte lligent Car )是电子计算机最新科技成果与现代汽车工业相结合的产物。
在遵守大赛的一系列规则的前提下,主要采用嵌入式软件开发工具软件Code W a rrior 和在线开发手段设计并制作一辆能以最快速度自主识别各种形式的路线的智能车,以9S12×S128为控制核心完成图像信息数据采集与处理;对摄像头范围内的路径状况分析,较好地获取跑道上的小S 、大S 、深S 信息,采用弦切法完成智能车跑内道的处理;采用P I D 算法对智能车的舵机进行控制,提高了舵机的相应速度,减少了对舵机控制的静态误差;采用了模糊控制法,对智能车的电机部分进行控制,建立模糊规则库;编写了无线传输模块的软件程序,可以对智能车行驶过程中的状态进行采集并传输至上位机,方便了智能车的调试工作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2020/4/22
22
西北工业大学—智能车协会
2 道路信息的采集
(2) 采集的基本原理 b 光电组和电磁组采集的是一行点,一维。
采集到的道路信息比较少,依靠光电接收器 和电感线圈来采集信息,AD对光电管或电感线圈 的电压值进行转换将模拟信号转化为数字信号处 理。
4
西北工业大学—智能车协会
2020/4/22
5
西北工业大学—智能车协会
2020/4/22
6
西北工业大学—智能车协会
2020/4/22
7
西北工业大学—智能车协会
硬件系统结构(CCD)
2020/4/22
8
西北工业大学—智能车协会
软件设计
❖1 初始化 ❖2 道路信息的采集 ❖3 道路信息的提取 ❖4 方向的控制 ❖5 速度的控制
PWM3,SA控制PWM4和PWM5,SB控制PWM6和PWM7
PWMPOL=0xFF;
//所有通道位极限为1
PWMCAE=0x00;
//所有通道左对齐
PWMPER01=625;
//电机正转频率为6.25MHz/625=10KHz
PWMDTY01=0;
//电机正转初值赋0
PWMPER23=625;
//电机反转频率为6.25MHz/625=10KHz
智能车协会培训
—软件设计
2020/4/22
1
西北工业大学—智能车协会
问题1:
智能车最终实现了什么? 或做了哪些动作?
2020/4/22
2
西北工业大学—智能车协会
问题2:
为什么说智能车“智能”? “智能”的程度?
2020/4/22
3
西北工业大学—智能车协会
智能车的组成:
软件
硬件
机械
2020/4/22
集跑道信息。
2020/4/22
19
西北工业大学—智能车协会
2 道路信息的采集
❖(1) 传感器的选择 —稳定、合适
❖ 摄像头:
2020/4/22
20
西北工业大学—智能车协会
2 道路信息的采集
❖ 光电:发射器和接收器
❖ 电磁:电感线圈和干簧管
2020/4/22
21
西北工业大学—智能车协会
2 道路信息的采集
//总线时钟=16MHz*
(SYNR+1)/(REFDV+1)=48MHz
while( CRGFLG_LOCK==0);
//等待VCO达到稳定
CLKSEL=0x80;
//打开PLL
2020/4/22
14
西北工业大学—智能车协会
1 初始化
❖ I/O初始化
DDRT=0; DDRH=0x00; DDRB=0xFF; DDRK=0xC0; PORTK_PK7=0;
PWMPRCLK=0x33;
//时钟A=时钟B=bus clock/8=50M/8=6.25M
PWMSCLA=0x01;
//时钟SA=时钟A/2/1=3.125M
PWMSCLB=0x01;
//时钟SB=时钟B/2/1=3.125M
PWMCLK=0xF0;
//时钟A控制PWM0和PWM1,B控制PWM2和
特殊的情况); (3)采用边缘扩展法提取剩余行的黑线(要注意
处理斜十字叉等)。
2020/4/22
//测速接口PT7设置为输入 //场同步接口PH1设置输入
//调试灯B口设置输出 //拨码开关设置输入
2020/4/22
15
西北工业大学—智能车协会
1 初始化
❖ ECT初始化
TIOS=0x0F;
TIE=0; TSCR2=0x04;
TCTL3=0x40; TSCR1=0x80; IRQCR=0;
//0-3通道设置为输出比较, 4-7通道设置为输入捕捉 //初始化时,屏蔽所有通道的中断 //溢出中断,计时器频率由总线频 率16分频得到==3.125MHz //检测上升沿 //启动ECT模块及计数器
2020/4/22
16
西北工业大学—智能车协会
1 初始化
❖ AD初始化
ATD0CTL1=0x00; //7:1-外部触发,65:00-8位精度,4:放 电,3210:ch
ATD0CTL2=0x40; //禁止外部触发, 中断禁止 ATD0CTL3=0x08; //左对齐无符号,每次转换1个序列,
No FIFO, Freeze模式下继续转 ATD0CTL4=0x00; //765:采样时间为4个AD时钟周期,
11
西北工业大学—智能车协会
1 初始化
2020/4/22
12
西北工业大学—智能车协会
1 初始化
❖(1) 时钟模块 ❖(2) I/O模块 ❖(3) ECT模块 ❖(4) AD模块 ❖(5) PWM模块
2020/4/22
13
西北工业大学—智能车协会
1 初始化
❖ 时钟初始化
REFDV=1;
SYNR=5;
PWMDTY23=0;
//电机反转初值赋0
PWMPER67=62500;
//舵机频率为3.125MHz/62500=50Hz
PWMDTY67=4820;
//舵机初值居中
PWME=0xFF;
//启动PWM
2020/4/2 道路信息的采集
❖ 将当前的道路实际信息正确采集。 ❖ 理解信息采集的原理,通过编程实践能够正确采
ATDClock=[BusClock*0.5]/[PRS+1] ATD0CTL5=0x00; ATD0DIEN=0x00; //禁止数字输入
2020/4/22
17
西北工业大学—智能车协会
1 初始化
❖ PWM初始化
PWMCTL=0xF0;
//将PWM4和PWM5合成16位,PWM01合并,
PWM23合并,PWM67合并
基础 准备 难点 关键(1) 关键(2)
2020/4/22
9
西北工业大学—智能车协会
整体流程
初始化 信息采集 信息处理 停车判断
舵机控制 电机控制
停车
2020/4/22
10
西北工业大学—智能车协会
1 初始化
❖ 了解XS128各个模块的功能,能够正确 初始化各个模块,让芯片处在正常工作状态。
2020/4/22
2020/4/22
23
西北工业大学—智能车协会
3 道路信息的提取
❖ 黑线提取:采用相应算法正确提取黑线 (铜导线)
的位置。
2020/4/22
24
西北工业大学—智能车协会
3 道路信息的提取
❖ 摄像头组: 基本的思路(只是一种方法): (1)从图像的首行(距离车模最近的一行)
开始搜索提取; (2)在前几行将黑线的位置确定下来(注意各种