DC-N3介绍
开关电源原理设计及实例变压器隔离的DCDC变换器拓扑结构课堂课件

对电源进行充电;另一方面,流过反馈线圈 N3 绕组中的电流产生的磁场可以使
变压器的铁心退磁,使变压器铁心中医的学磁知识场!强度恢复到初始状态。
17
4.3 单端反激式结构
4.3.1 简介
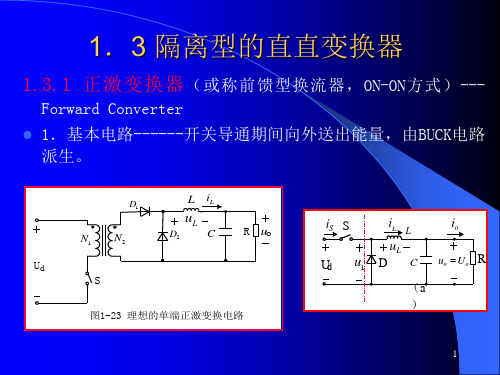
所谓单端反激式变压器开关电源,是指当变压器的初级线圈正好被直 流电压激励时,变压器的次级线圈没有向负载提供功率输出,而仅在变压 器初级线圈的激励电压被关断后才向负载提供功率输出,这种变压器开关 电源称为反激式开关电源。单端反激变换器是在反极性(Buck--Boost)变 换器基础上演变而来的,因此具有反极性变换器的特性。
医学知识!
4
4.1 概述
直流
逆变 电路
交流
变压器
交流
整流 电路
脉动
直流
直流
滤波器
图 4-1 隔离DC-DC变换器功能示意图
医学知识!
5
4.1 概述
升压和降压等变换器可以完成直流电压的变换。但实际上存在着转换功能上的局
限性,例如,输入输出不隔离,输入输出电压比或电流比不能过大以及无法实现多路 输出等。这种局限性只能用另一种开关变换器中的重要组件—变压隔离器来克服。下 面列出采用变压器隔离结构的原因: 输出端与输入端之间需要隔离; 变压器可以同时输出多组不同数值的电压,改变输出电压和输出电流很容易,只需 改变变压器的匝数比和漆包线截面积的大小即可;
4.2.3 电路关键节点波形
医学知识!
11
4.2 单端正激式结构
变压器的磁心复位:开关 S 导通后,变压器的励磁电流由零开始,随着时
间的增加而线性的增长,直到 S 关断。为防止变压器的励磁电感饱和,必须设
法使励磁电流在 S 关断后到下一次再开通的一段时间内降回零,这一过程称为
3R33 三种模式
本帖最后由GandF于2010-5-16 10:30 编辑KIS-3R33S DC-DC电源模块的用法/viewthread.php?tid=2796&highlight= 解说图R3实际是两个51K的电阻并联基本用法一、降压模式线路接法:Vin 与GND 输入,Vout与GND 输出(脚的定义见上图)输出电压= 0.925V * (R3 + R2) / R2;默认输出3.3V ~= 0.925V * (51K//51K + 10K) / 10K 改变R3就可以调节输出电压二、负压模式(本人最新研究成果。
虽然跨出的是小步,但将会引起更多的变化)第一种负压模式:实测输出- 3.3V3A线路接法:Vin 与Vout输入,Vout 与GND 输出(脚的定义见上图)例如:Vin 与Vout输入5V,那么GND 与Vout就输出- 3.3V输出电压= 0.925V * (R3 + R2) / R2;默认输出3.3V ~= 0.925V * (51K//51K + 10K) / 10K改变R3就可以调节输出电压第二种负压模式:实测输出19.5V1A线路接法:Vin 与Vout输入,Vin 与GND 输出,Vadj 接Vin,去除R3 (脚的定义见上图)例如:R1换成200K,Vin 与Vout输入5V,那么Vin 与GND 就输出19.5V输出电压= 0.925V * (R1 + R2) / R2;R1设为200K,输出19.5V ~= 0.925V * (200K + 10K) / 10K 改变R1就可以调节输出电压第三种负压模式- 隔离电源(第一种负压模式变形):使用高频磁环,也就是传说中的铁硅铝磁环77120A7。
初级与次级的线圈比例为9:11输出使用5819二极管和330uF的电容输出电压电流3.57V0.1A3.52V0.2A3.42V0.5A3.31V0.8A3.23V1A修改的电路图下面就应用组合了。
彩色多普勒超声系统程哦技术要求深圳迈瑞

2性能指标2.1安全2.1.1 诊断系统的安全要求应符合GB9706.1-2007 、GB9706.9-2008 和GB9706.15-2008的规定。
2.1.2 诊断系统的电磁兼容性应符合 YY0505-2012 与GB9706.9-2008 第36 条的规定2.2性能要求2.2.1诊断系统主机和配套的探头的下列技术指标应符合表附录 F 表F2 规定:a)侧向、轴向分辨力,单位 mm;b)盲区,单位 mm;c)探测深度,单位 mm;d)横向、纵向几何位置精度,(%)。
2.2.2电源电压适应范围:90-264V~;内部电源输出电压:14.8V。
2.2.3连续工作时间:>24 小时。
作为内部电源设备,连续工作时间不小于 60 分钟,待机时间不小于 24 小时。
2.2.4声工作频率:声工作频率与标称频率的偏差应在±15%范围之内。
2.2.5切片厚度:切片厚度如附录 F 表F3 所示,切片厚度指标应在随机文件中公布。
2.2.6周长和面积测量偏差:周长测量偏差应在±10%范围之内;面积测量偏差应在±7%范围之内。
2.2.7M 模式性能指标:具有 M 模式的探头,应进行 M 模式时间显示误差的性能测试。
M 模式时间显示误差应≤2%。
2.2.8彩色血流成像模式性能要求a)在彩色血流成像模式下,各探头在其多普勒工作频率下的探测深度应不小于附录 F 表F4 的要求。
b)彩色血流图像与其所在管道的灰阶图像应基本重合。
c)血流方向应能正确识别,无混叠现象。
2.2.9频谱多普勒模式性能要求a)在频谱多普勒模式下,各探头在其多普勒工作频率下的探测深度应不小于附录 F 表F4 的要求。
b)彩超的血流速度读数误差应不超过附录 F 表F4 的要求。
c)取样区游标位置应准确。
2.2.10造影成像(仅探头 3C5A/C6-2/SC5-1N 支持)a)最大成像深度: ≥12cm。
b)与 B 模式图像重合度:与其所在管道的灰阶图像应基本重合,偏差在±10 %内。
DC TO DC CONVERTER产品常用电子元件简介

b(基極)
e (發射極)
NPN_SOT-89
2SD1664 (32V_1A)
c(集電極)
2SD1898 (80V_1A)
DA RG
DF RE
b(基極)
e (發射極)
DC TO DC CONVERTER產品常用 電子元件識別
主講人﹕黃林森
1. 常用的線路架構 2. 常用電子元件廠商﹑規格﹑封裝 3. 如何辯認相關電子元件
DC-DC常用線路架構
1. Royal 線路架構 (Input :Vin ±10% ) 2. RCC 線路架構 ( Input: Wide 2:1) 3. PWM 線路架構 ( Input: Wide 2:1) 4. Forward 線路架構 ( Input: Wide 2:1)
为双线同绕之圈数
1
2
3
4
2. Royal + Regulaed Output
D
D
Pin 1,24 +Vin
R1 R2
C2
f
N5
e
C
DC Input
C1
T1
N6
d
2
B
Pin 12,13 GND-P
3
PH1B
4
R7
Q3 1
3
T1
a
g
Q1
N1 N3
b
h
N2 N4
Q2
c
i
D1
+Vou t
Pin 11 ,14
常用電子元件
4. 穩壓管﹕ 穩壓管-----Regulator
5. 光電元件: 光電晶體-----Photo Transistor 光電二極體—Photo Diode 光耦合器------Photo Couple LED------------Light Emission Diode發
DC DC转换器 URB_MT-3WR3系列

3W,Ultra wide input isolated®ulated singleoutput DC/DC converterCB Patent Protection RoHSFEATURES●Ultra wide input voltage rang (4:1)●High efficiency up to 84%●No-load power consumption as low as 0.10W ●Isolation voltage:1.5K VDC●Input Under-voltage Protection ,outputshort-circuit protection ,over-current protection ●Operating temperature range:-40℃to +85℃●International standard pin-out●IEC60950,UL60950,EN60950approvalURB_MT-3WR3series products are of 3W output power,extremely wide range of voltage input of 9-36VDC,18-75VDC,isolation voltage of 1500VDC,Input Under-voltage Protection,output short circuit protection,over-current protection,these products are widely used in fields such as industrial control,electric power,instruments and communication.Selection GuideCertificationPart No.Input Voltage (VDC)OutputEfficiency ②(%,Min./Typ.)@Full LoadMax.Capacitive Load(µF)Nominal (Range)Max.①Output Voltage (VDC)Output Current (mA)(Max./Min.)--URB2403MT-3WR324(9-36)403.3728/073/752200UL /CE/CBURB2405MT-3WR35600/078/802200--URB2409MT-3WR39333/078/801000UL/CE/CBURB2412MT-3WR312250/080/82680URB2415MT-3WR315200/081/83470URB2424MT-3WR324125/080/82100CEURB4803MT-3WR348(18-75)803.3728/073/752200URB4805MT-3WR35600/077/792200URB4812MT-3WR312250/080/82680URB4815MT-3WR315200/082/84470URB4824MT-3WR324125/080/82100Notes:①Exceeding the maximum input voltage may cause permanent damage ;②The efficiency value is measured in the input nominal voltage and output rated load.Input SpecificationsItemOperating Conditions Min.Typ.Max.UnitInput Current (full load /no-load)24VDC input series nominal input voltage3.3V Output --134/4138/7mA Others --154/4161/748VDC input series nominal input voltage3.3V Output --67/469/7Others--77/482/7Reflected Ripple Current Nominal 24VDC input series --120--Nominal 48VDC input series --60--Surge Voltage (1sec.max.)Nominal 24VDC input series -0.7--50VDC Nominal 48VDC input series -0.7--100Starting VoltageNominal 24VDC input series ----9Nominal 48VDC input series ----18Input under-voltage protection Nominal 24VDC input series 5.5 6.5--Nominal 48VDC input series1315.5--Starting Time Nominal input voltage &constant resistance load--10--ms Input FilterC filterCtr l*Module turn-onCtrl pin floating or connected to TTL highlevel(3.5-12VDC)Module turn-offCtrl pin connected to GND or low level(0-1.2VDC)Input current when switched off--610mAHot PlugUnavailableNote:*The voltage of Ctrl pin is relative to input pin GND.Output SpecificationsItemOperating ConditionsMin.Typ.Max.UnitOutput Voltage Accuracy --±1±3%Line Regulation Full load,the input voltage is from low voltage to high voltage --±0.2±0.5Load Regulation 0%-100%load--±0.5±1Transient Recovery Time 25%load step change,nominal input voltage --300500µs Transient Response Deviation --±3±5%Temperature Coefficient Full load----±0.03%/℃Ripple &Noise*20MHz bandwidth ,5%-100%load --30120mV p-p Over-current Protection Input voltage range --150250%Io Short circuit ProtectionHiccup protectionNote:*Ripple and noise are measured by “parallel cable”method,please see DC-DC Converter Application Notes for specific operation.0%-5%load ripple&Noise is no more than 5%Vo.General SpecificationsItemOperating ConditionsMin.Typ.Max.Unit Insulation Voltage Input-output,with the test time of 1minute and the leak current lower than 1mA 1500----VDC Insulation Resistance Input-output,insulation voltage 500VDC 1000----M ΩIsolation Capacitance Input-output,100KHz/0.1V --1000--pFOperating Temperature see Fig.1-40--+85℃Storage Temperature -55--+125Casing Temperature Rise Ta=25℃,nominal input voltage,full load output --+40--Pin Welding Resistance Temperature Welding spot is 1.5mm away from the casing,10seconds ----+300Storage HumidityNon-condensing 5--95%RH Reflow Soldering Temperature Peak temp.≤245℃,maximum duration time ≤60s at 217℃.For actual application,please refer to IPC/JEDEC J-STD-020D.1.Vibration10-55Hz,10G,30Min.along X,Y and ZSwitching Frequency*PWM Mode--350--KHz MTBFMIL-HDBK-217F@25℃1000----K hoursNote:*This series of products using lower frequency technology,the switching frequency value is the test value in full load,when the load is reduced to 50%or less,the switching frequency decreases with decreasing load.Physical SpecificationsCasing Material Black flame-retardant heat-proof plastic Dimensions 19.20*18.10*10.16mm Weight3.5g(Typ.)Cooling MethodFree air convectionEMC SpecificationsEMICECISPR22/EN55022CLASS B (see Fig.3-②for recommended circuit)RE CISPR22/EN55022CLASS B (see Fig.3-②for recommended circuit)EMSESD IEC/EN61000-4-2Contact ±4KV perf.Criteria B RS IEC/EN61000-4-310V/mperf.Criteria A EFT IEC/EN61000-4-4±2KV (see Fig.3-①for recommended circuit)perf.Criteria B Surge IEC/EN61000-4-5line to line ±2KV (see Fig.3-①for recommended circuit)perf.Criteria B CSIEC/EN61000-4-63Vr.m.sperf.Criteria A Immunities of voltage dip,drop and short interruptionIEC/EN61000-4-290%,70%perf.Criteria BProduct Characteristic CurveOperating Temperature()℃Temperature Derating CurveO u t p u t P o w e r P e r c e n t a g e (%)-400407185120806010012040200Safe Operating AreaFig.1Design Reference1.Typical applicationAll the DC/DC converters of this series are tested according to the recommended circuit (see Fig.2)before delivery.If it is required to further reduce input and output ripple,properly increase the input &output of additional capacitors Cin and Cout or select capacitors of low equivalent impedance provided that the capacitance is no larger than the max.capacitive load of the product.VinGND+Vo0VDCCinDC CoutFig.2Vn Cin Cout 24VDC 100µF 10µF 48VDC10µF-47µF10µF2.EMC solution-recommended circuitVi nGND+Vo0VDC/DCLOADC2LDM1②MOVFUSE①C1CY1C3C0+Vi nGNDFig.3Notes:Part ①in the Fig.3is used for EMS test and part ②for EMI filtering;selected based on needs.Parameter descriptionModel Vin:24V Vin:48V FUSE Choose according to actual input currentMOV S20K30S14K60C0680µF/50V 680µF/100V C1,C2 4.7µF/50V4.7µF/100VC3Refer to the Cout in Fig.2LDM112µH CY11nF/2KV3.It is not allowed to connect modules output in parallel to enlarge the power4.For more information about Mornsun EMC Filter products,please visit todownload the Selection Guide of EMC FilterDimensions and Recommended LayoutNC:Pin to be isolated from circuitryNotes:1.Packing information please refer to Product Packing Information which can be downloaded from .TubePacking Bag Number:58010114,Reel Packing Bag Number:58010115;2.The max.capacitive load should be tested within the input voltage range and under full load conditions;3.If the product needs to be cleaned after welding,please wait to completely dried before electrical use it;4.Unless otherwise specified,parameters in this datasheet were measured under the conditions of Ta=25℃,humidity<75%RH with nominalinput voltage and rated output load;5.All index testing methods in this datasheet are based on our Company’s corporate standards;6.We can provide product customization service,please directly contact our technicians for specific information;7.Specifications of this product are subject to changes without prior notice.Mornsun Guangzhou Science&Technology Co.,Ltd.Address:No.5,Kehui St.1,Kehui Development Center,Science Ave.,Guangzhou Science City,Luogang District,Guangzhou,P.R.China Tel:86-20-38601850-8801Fax:86-20-38601272E-mail:***************。
迪伦技术N3 ELVIS III控制板用户指南说明书

User ManualQuanser Controls Board for NI ELVIS IIISetup and Configuration© 2018 Quanser Inc., All Rights ReservedPrinted in Markham, Ontario.This document and the software described in it are provided subject to a license agreement. LabVIEW and National Instruments are trademarks of National Instruments.All other trademarks or product names are the property of their respective owners. Additional Disclaimers: The reader assumes all risk of use of this resource and of all information, theories, and programs contained or described in it. This resource may contain technical inaccuracies, typographical errors, other errors and omissions, and out-of-date information. Neither the author nor the publisher assumes any responsibility or liability for any errors or omissions of any kind, to update any information, or for any infringement of any patent or other intellectual property right.Neither the author nor the publisher makes any warranties of any kind, including without limitation any warranty as to the sufficiency of the resource or of any information, theories, or programs contained or described in it, and any warranty that use of any information, theories, or programs contained or described in the resource will not infringe any patent or other intellectual property right. THIS RESOURCE IS PROVIDED “AS IS.” ALL WARRANTIES, EITHER EXPRESS OR IMPLIED, INCLUDING, BUT NOT LIMITED TO, ANY AND ALL IMPLIEDWARRANTIES OFMERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE, AND NON-INFRINGEMENT OF INTELLECTUAL PROPERTY RIGHTS, ARE DISCLAIMED. No right or license is granted by publisher or author under any patent or other intellectual property right, expressly, or by implication or estoppel.IN NO EVENT SHALL THE PUBLISHER OR THE AUTHOR BE LIABLE FOR ANY DIRECT, INDIRECT, SPECIAL, INCIDENTAL, COVER, ECONOMIC, OR CONSEQUENTIAL DAMAGES ARISING OUT OF THIS RESOURCE OR ANY INFORMATION, THEORIES, OR PROGRAMS CONTAINED OR DESCRIBED IN IT, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGES, AND EVEN IF CAUSED OR CONTRIBUTED TO BY THE NEGLIGENCE OF THE PUBLISHER, THE AUTHOR, OR OTHERS. Applicable law may not allow the exclusion or limitation of incidental or consequential damages, so the above limitation or exclusion may not apply to you.Safety InformationThe following symbols and definitions are interchangeably used throughout the User Manual:SymbolDescriptionCaution: consult documentation for additional information Attention: Observe precautions for handling electrostatic sensitivedevicesThe Quanser Controls BoardThe Quanser Controls board, pictured in Figure 1 is a complete platform for investigating almost all aspects of modern control theory from system modeling and PID control to stability and digital control design. The system consists of a deterministic DC motor with a high-resolution encoder, as well as a pendulum attachment for balance control. Complete courseware and software is provided for a large compliment of typical control challenges.Figure 1: The Quanser Controls boardMain Features•Direct-drive brushed DC motor•512 count encoder mounted on the motor (giving 2048 count granularity with quadrature decoding), and on the pendulum arm•Built in deterministic PWM amplifier mapped to theoretical motor models•DC motor current senseCautionThis equipment is designed to be used for educational and research purposes and is not intended for use by the general public. The user is responsible to ensure that the equipment will be used by technically qualified personnel only.System Hardware ComponentsThe major components of the application board are identified in Figure 3.Table 1: Application board hardware componentsID Component IDComponent1Inertia Load 4PCI Connector for interfacing with NIELVIS III2 DC motor and encoder 5 Pendulum encoder (optional)3Pendulum encoder connector6Pendulum encoder data cable(optional)Figure 3: Quanser mechatronic systems board components1456DC MotorThe application board includes a direct-drive brushed DC motors to drive either the inertia load or pendulum arm. The motor specifications are given in Table 2.The included motor is a Premotec CL40 Series Coreless DC Motors. The complete specification sheet for the motor is available from Allied Motion.Caution Exposed moving parts.EncoderThe encoders used to measure the angular position of the motor and pendulum are single-ended, optical shaft encoders. They output 2048 counts per revolution in quadrature mode (512 lines per revolution).The included encoders are the US Digital E8P-512-118 single-ended optical shaft encoder. The complete specification sheet of the encoders is available from US Digital. EnvironmentalThe QNET Mechatronic Systems is designed to function under the following environmental conditions:•Standard rating•Indoor use only•Temperature 5◦C to 40◦C•Altitude up to 2000 m•Maximum relative humidity of 80% up to 31◦C decreasing linearly to 50% relative humidity at 40◦C•Pollution Degree 2•Maximum transient overvoltage 2500 V•Marked degree of protection to IEC 60529: Ordinary Equipment (IPX0)System ParametersTable 2: Application board system parametersSymbol Description ValueDC MotorV nom Nominal motor voltage 18.0 V τnom Nominal motor torque 22.0 Nmm ωnom Nominal speed 3050 RPMI nom Nominal current 0.540 AR m Terminal resistance 8.4 Ωk t Torque constant 0.042 Nm/A k m Motor back-emf constant 0.042 V/(rad/s) J m Rotor inertia 4.0 x 10-6 kgm2 L m Rotor inductance 1.16 mH ϴE Encoder count angle (in quadrature) 0.176 deg m h Module attachment hub mass 0.0106 kg r h Module attachment hub radius 0.0111 m J h Module attachment moment of inertia 0.6 x 10-6 kg-m2 Inertia Discm d Disc mass 0.053 kg r d Disc radius 0.0248 m Rotary Pendulum Module (Optional)m r Rotary arm mass 0.095 kg L r Rotary arm length 0.085 m m p Pendulum link mass 0.024 kg L p Pendulum link length 0.129 m System SetupThe procedure to set up the Quanser Controls board on the NI ELVIS III module is detailed in this section.Caution If the equipment is used in a manner not specified by themanufacturer, the protection provided by the equipmentmay be impaired.ESDWarningThe electrical components on the Quanser Mechatronic Systems board are sensitive to electrostatic discharge (ESD). Before handling the board ensure that you have been properly grounded.Figure 3: Components of the NI ELVIS IIIID ComponentIDComponent 1Antenna connector 6 Connection data screen 2 Ethernet connector 7 PCI connector 3 USB C connector 8 Handle latching hooks 4 Power cable 9 Status LEDs 5Power switch10 Application board power buttonCautionDo NOT make the following connections while power issupplied to the application board!Follow these instructions to setup the application board on the NI ELVIS III:61 2 34 5109781. Power on the ELVIS III2. Connect the ELVIS III to the network or to your computer via USB C3. Ensure the LED on the application board power button is NOT lit4. Position the handle of the application board over the handle latching hooks5. Position the PCI connector on the application board so that it aligns with the PCIconnector on the ELVIS III6. Push the application board upward until the PCI connector is firmly seated7. Press the application board power button and ensure the LED on the button is lit TroubleshootingPlease review the following before contacting technical support.1. Verify the board is properly seated on the ELVIS III and that it has power.2. Verify that the ELVIS III is correctly set up as outlined in the NI productdocumentation.You are getting 'VI Missing' messagesMake sure the required LabVIEW add-ons listed in the Quick-Start Guide are installed. Verify that the correct LabVIEW version is installed (The ELVIS III is only compatible with LabVIEW 2018 or later).Board does not respondCheck that the source distribution has been deployed as outlined above.。
DC-DC变换电路
第四章DC-DC变换电路第一节概述一、DC-DC电路的功能1)直流电幅值的变换2)直流电极性的变换3)直流电路阻抗变换4)有源滤波二、常用无变压器隔离DC-DC开关变换电路1)降压变换电路(BUCK电路)2)升压变换电路(BOOST电路)3)升降压变换电路(BUCK- BOOST电路)4)库克电路(CUK电路)三、常用变压器隔离DC-DC开关变换电路1)正激式变换电路2)反激式变换电路3)桥式变换电路(本课程不作要求)四、控制方式1)脉冲频率调制(PFM)一个周期内开关接通时间不变,但开关频率(周期)按要求变化,从而改变开关接通的占空比(t on/T)。
2)脉冲宽度调制(PWM)开关频率(周期)不变,但一个周期内开关接通时间按要求变化,从而改变开关接通的占空比(t on/T)。
两种方法都可以改变占空比,从而改变输入与输出的关系,但PFM由于频率变动,不易滤波,因此常用PWM方式。
第二节降压变换电路(BUCK电路)一、分析假定1、晶体管、二极管具有理想特性2、电感足够大,电感电流连续,电感无损耗3、电容足够大,电容电压脉动可以忽略,电容无损耗4、输入直流电压无脉动5、电路处于稳态(以上假定是对实际工况在一定条件下的近似)(电路波形先做分析,然后再介绍工作过程分析)波形说明:1、 由于电感电流连续,稳态时VT 开通瞬间电流大于等于零;2、 由于忽略电容上电压变化,输出电流基本不变;3、 由于稳态时一个周期内电容上的电压波动必须平衡(否则电压会有持续漂移),电容上的充放电在一个周期内保持平衡。
4、依据电路拓扑,电源输入平均电流与电感电流的关系有: VT in i I = 二、工作过程分析1、输入输出电压关系分析a 、 晶体管导通状态(t 0≤ t≤ t 1=K T )VD 关断,电路拓扑如图4-1b ,依据假定条件,u d 和 u o 维持不变,为恒定值。
tiLu u u d d o d L =-= (u d - u o )为常数,电流变化为线性b 、 二极管VD 导通模式(t 1≤ t ≤T )晶体管关断,电感续流,二极管导通,电路拓扑如图4-1c由于U o 维持不变,输出电流线性变化c 、输出特性分析考虑到电路稳态工作时的周期性,第一阶段和第二阶段的 ∆I 相等2、输入输出电流关系由假定电路无损,输入输出能量守恒,有:I 为电源输入电流3、电感电流和输出电压脉动分析 1o d )(t LU U I -=∆tiLU d d o =12o d d t t I L t i LU -∆==Lt t U I )(120-=∆Lt t U L t U U )()(12o 1o d -=-d d 1d 21o KU U TtU t t U ===od o o d I KU I U I U ==o KI I =fLKK U KT L K U t L U U I )1()1()(d d 1o d -=-=-=∆112o d L d d t ILt I L t I I L t i L u u u ∆=∆∆=∆-==-=考虑到输出电压脉动很小(假定基本恒定),有∆ i L ≈∆ i C ,且有一周期内电容充放电平衡,根据图4-2中i c 波形,∆Q 的时间为T/2。
隔离型DC DC变换器
N1 N3 N2
Ud i1
i3
S
D3
iL
uL
D2
C
R uo
图1-24 实际单端正激变换电路图
U1
U1tON
N1 N3
U t3 rst
Ud
Ud
复位时间:
trst
N3 N1
tON
最大占空比:
D tON 1 tON trst 1 N3 N1
5
图126 实际 正激变换器 的波形图
u1
Ud
O
N1 N3
过程:开关S关断后,变压器励磁电流通过N3绕组和D3流
回电源,并逐渐线性的下降为零。从S关断到N3绕组的电流下
降到零所需的时间trst由式
trst
N3 N1
tON
给出。S处于断态的时
间必须大于trst,以保证S下次开通前励磁电流能够降为零,使
变压器磁心可靠复位。
4
图1.25 磁芯复位原理
i2 D1
iL
O
t
Ud
t t t t 18 t
图1.27 单端正激改进型电路之二
S1 Ud
D3
D1
L
uL
N1
N2
D2
C
R uo
D4
S2
图1-27 双管单端正激变换器电路
返回
19
图1.2 单端反激基本电路
返回
20
图1.2 单端反激电路波形图
返回
21
io
图1-28 单端反激式变换器电路
N1: N2
i2
D
C
S
(b)
R Uo
8
1.3.2 单端反激变换器
工作原理:S导通时,由于变压器付边感应
利用MOSFET管自举升压驱动电路

利用MOSFET管自举升压驱动电路MOS管最显著的特性是开关特性好,所以被广泛应用在需要电子开关的电路中,常见的如开关电源和马达驱动,也有照明调光。
现在的MOS驱动,有几个特别的需求,1,低压应用当使用5V电源,这时候如果使用传统的图腾柱结构,由于三极管的be有0.7V左右的压降,导致实际最终加在gate上的电压只有4.3V。
这时候,我们选用标称gate电压4.5V的MOS管就存在一定的风险。
同样的问题也发生在使用3V或者其他低压电源的场合。
2,宽电压应用输入电压并不是一个固定值,它会随着时间或者其他因素而变动。
这个变动导致PWM电路提供给MOS管的驱动电压是不稳定的。
为了让MOS管在高gate电压下安全,很多MOS管内置了稳压管强行限制gate电压的幅值。
在这种情况下,当提供的驱动电压超过稳压管的电压,就会引起较大的静态功耗。
同时,如果简单的用电阻分压的原理降低gate电压,就会出现输入电压比较高的时候,MOS管工作良好,而输入电压降低的时候gate电压不足,引起导通不够彻底,从而增加功耗。
3,双电压应用在一些控制电路中,逻辑部分使用典型的5V或者3.3V数字电压,而功率部分使用12V甚至更高的电压。
两个电压采用共地方式连接。
这就提出一个要求,需要使用一个电路,让低压侧能够有效的控制高压侧的MOS管,同时高压侧的MOS管也同样会面对1和2中提到的问题。
在这三种情况下,图腾柱结构无法满足输出要求,而很多现成的MOS驱动IC,似乎也没有包含gate电压限制的结构。
于是我设计了一个相对通用的电路来满足这三种需求。
电路图如下:图1用于NMOS的驱动电路图2用于PMOS的驱动电路这里我只针对NMOS驱动电路做一个简单分析:Vl和Vh分别是低端和高端的电源,两个电压可以是相同的,但是Vl不应该超过Vh。
Q1和Q2组成了一个反置的图腾柱,用来实现隔离,同时确保两只驱动管Q3和Q4不会同时导通。
R2和R3提供了PWM电压基准,通过改变这个基准,可以让电路工作在PWM信号波形比较陡直的位置。
dc03的材料标准
dc03的材料标准DC03的材料标准。
DC03是一种冷轧低碳钢板材,具有良好的成型性能和焊接性能,广泛应用于汽车制造、家电制造、机械制造等领域。
DC03的材料标准对其化学成分、机械性能、表面质量等方面进行了详细规定,以确保产品质量和性能稳定。
下面将对DC03的材料标准进行详细介绍。
首先,DC03的化学成分主要包括碳含量、硅含量、锰含量、磷含量和硫含量。
其中,碳含量控制在0.10%以下,硅含量控制在0.03%以下,锰含量控制在0.45%以下,磷含量控制在0.035%以下,硫含量控制在0.035%以下。
这些化学成分的控制可以保证DC03钢板具有良好的成型性能和焊接性能。
其次,DC03的机械性能包括抗拉强度、屈服强度、延伸率等指标。
根据材料标准,DC03的抗拉强度范围为270-370MPa,屈服强度范围为140-270MPa,延伸率范围为38%以上。
这些机械性能指标的要求可以确保DC03钢板在加工过程中具有良好的强度和延展性,能够满足不同工艺要求的应用需求。
此外,DC03的材料标准还对其表面质量进行了严格规定。
表面质量主要包括表面处理、表面清洁度、表面平整度等方面。
根据标准规定,DC03钢板的表面应具有良好的清洁度,不得有明显的油污、锈斑和划痕;表面应平整,不得有凹凸不平和皱纹。
这些表面质量的要求可以确保DC03钢板在使用过程中具有良好的外观和加工性能。
总的来说,DC03的材料标准对其化学成分、机械性能、表面质量等方面进行了严格规定,以确保产品质量和性能稳定。
生产厂家在生产过程中应严格按照标准要求进行生产,确保产品符合标准要求。
同时,用户在选用DC03钢板时,应注意查看产品合格证书,确保产品质量可靠,符合要求。
通过对DC03的材料标准的详细介绍,相信大家对这一产品有了更深入的了解,同时也能更加准确地选择和应用这一产品,从而为相关行业的发展和应用提供更好的支持。
希望本文能对大家有所帮助,谢谢阅读。
DC-DC的工作原理

3)测试程序的调试。
根据测试规范的顺序调试各测试项目,调试时应尽量一
项一项调试,这样的话若测试
程序对产品有损伤的话可以快速锁定是哪个测试项目对
其有损伤,便于尽快查找出原因。
4)测试规范和样管数据确认
根据调试结果制定测试规范,制作样管并将测试数据
发给客户确认,待客户确认规范和数据后才可正常量产。
对于大多数应用, 10uF 就能保持输出纹波很小,电压很稳
定。输入电容和输出电容建议都采用 X5R、 X7R 电价质陶瓷
贴片电容,它具有较低的成本,较小的体积,低的 ESR,能
获得非常低的纹波。
3、测试程序的编写与调试
1)根据测试规范编写测试程序,并逐项进行调试。
2)根据调试结果制定测试规范和样管数据并将规范和数
流模式PWM单片式降压稳压器,可以提供输出电压
可调品种和1.2V、1.8V等固定输出电压的品种。稳压
器在无负载时的工作电流为300uA;当处于关断时,
工作电流降到1uA以下。输入工作电压范围为2.5V至
6.5V,非常适合于单节锂离子电池或两至四节干电池
供电的电子产品。AP2406采用100%占空比的方式,
二极管
2.5V至6.5V输入电压范围
输出电压可低至0.6V
允许低压差操作:占空比可达100%
低静态工作电流:300μA(VIN < 4.2V)
电流模式实现优异的线性和负载瞬态响应
短路保护和过温保护
待机电流小于1μA
节约空间的5引脚SOT23封装
C
K3
MC74HC04N
U2D
9
Mounting Hole
GND
温度补偿衰减器

12
技术支持与服务
欢迎索取免费样品及测试治具
STCA 系列
MTCA 系列
测试治具 测试PCB板
测试治具 测试PCB板
TCA、BTCA系列
测试治具 测试PCB板
13
类别 外观检查 静态阻值 温度冲击
低温 温度循环 高温烘烤 Burn in 附着力
和 可焊性
功率
6
频率特性
TCA 系列的频率特性 @1~10dB(25 ℃)
7
性能优势
z 频率范围: DC to 3 GHz, DC to 6 GHz, DC to 12.4 GHz, DC to 18 GHz。 z 输入功率: 100mW, 200mW, 2W。 z 阻抗: 50Ω or 75Ω。 z 工作温度: -55 ℃ to +150 ℃。 z 衰减量范围从1dB至10dB,具有10种类型的衰减量,每种衰减量具有N3、N4、N5、
功率寿命试验:70℃下加相应功率的1GHz的射频信号,90分钟加 载,30分钟不加载,持续1000小时
测试比率 100% 100% 100%
每批次3‰-5‰ 每批次3‰-5‰ 每批次3‰-5‰ 每批次3‰-5‰
每批次3‰-5‰ 每批次3‰-5‰ 每批次3‰-5‰
施耐德 C10N3TM100 断路器 ComPacT NSX100N 数据表

Product data sheetCharacteristicsC10N3TM100断路器 ComPacT NSX100N, 50 kA (415 VAC),TMD 脱扣单元 100 A, 3P3DT h e i n f o r m a t i o n p r o v i d e d i n t h i s d o c u m e n t a t i o n c o n t a i n s g e n e r a l d e s c r i p t i o n s a n d /o r t e c h n i c a l c h a r a c t e r i s t i c s o f t h e p e r f o r m a n c e o f t h e p r o d u c t s c o n t a i n e d h e r e i n .T h i s d o c u m e n t a t i o n i s n o t i n t e n d e d a s a s u b s t i t u t e f o r a n d i s n o t t o b e u s e d f o r d e t e r m i n i n g s u i t a b i l i t y o r r e l i a b i l i t y o f t h e s e p r o d u c t s f o r s p e c i f i c u s e r a p p l i c a t i o n s .I t i s t h e d u t y o f a n y s u c h u s e r o r i n t e g r a t o r t o p e r f o r m t h e a p p r o p r i a t e a n d c o m p l e t e r i s k a n a l y s i s , e v a l u a t i o n a n d t e s t i n g o f t h e p r o d u c t s w i t h r e s p e c t t o t h e r e l e v a n t s p e c i f i c a p p l i c a t i o n o r u s e t h e r e o f .N e i t h e r S c h n e i d e r E l e c t r i c I n d u s t r i e s S A S n o r a n y o f i t s a f f i l i a t e s o r s u b s i d i a r i e s s h a l l b e r e s p o n s i b l e o r l i a b l e f o r m i s u s e o f t h e i n f o r m a t i o n c o n t a i n e d h e r e i n .主要信息产品系列ComPacT new generation产品名称ComPacT NSX new generation产品短名NSX100N产品类型断路器产品应用配电保护极数3P保护极说明3D额定电流 [In]100 A 在…上 40 °C额定工作电压 [Ue]690 V AC 50/60 Hz电网类型AC电网频率50/60 Hz隔离功能适用 符合 TM-D使用类别AC类分断能力90 KA Icu 在…上 220/240 V AC 50/60 Hz 符合 IEC 60947-250 KA Icu 在…上 380/415 V AC 50/60 Hz 符合 IEC 60947-250 KA Icu 在…上 440 V AC 50/60 Hz 符合 IEC 60947-236 KA Icu 在…上 500 V AC 50/60 Hz 符合 IEC 60947-235 KA Icu 在…上 525 V AC 50/60 Hz 符合 IEC 60947-210 KA Icu 在…上 660/690 V AC 50/60 Hz 符合 IEC 60947-2分断能力N 50 kA 415 V AC脱扣器名称TM-D脱扣器类型热磁式脱扣器保护功能LI控制类型手柄安装类型固定式补充信息额定绝缘电压 [Ui]800 V AC 50/60 Hz额定冲击耐受电压 [Uimp]8 KV使用分断能力 [Ics]90 KA 在…上 220/240 V AC 50/60 Hz 符合 IEC 60947-250 KA 在…上 380/415 V AC 50/60 Hz 符合 IEC 60947-250 KA 在…上 440 V AC 50/60 Hz 符合 IEC 60947-236 KA 在…上 500 V AC 50/60 Hz 符合 IEC 60947-235 KA 在…上 525 V AC 50/60 Hz 符合 IEC 60947-210 KA 在…上 660/690 V AC 50/60 Hz 符合 IEC 60947-2机械寿命50000 次电气寿命50000 次 在…上 440 V In/230000 次 在…上 440 V In20000 次 在…上 690 V In/210000 次 在…上 690 V In每极功耗8.8 W安装方式底板安装安装位置水平和垂直方向Flat on the back连接方式-上端前连接连接方式-下端前连接极间距35 Mm保护类型L : for 过载保护 (热保护)I : for 短路保护 (磁保护)脱扣器额定值100 A 在…上 40 °C长延时电流整定类型可调长延时电流整定值 [Ir]0.7...1 x In长延时时间整定类型固定式[tr] 长延时时间整定范围120…400 S 在…上 1.5 x In15 S 在…上 6 x Ir瞬时保护电流整定类型固定式瞬时保护整定值 [Ii]800 A漏电流保护无漏电保护槽位数 5 槽宽度105 Mm高度161 Mm深度86 Mm净重 2.05 Kg环境符合标准TM-D过电压类别Class II电击保护级别Class II污染等级 3 符合 IEC 60664-1IP 保护等级IP40 conforming to IEC 60529 IK 保护等级IK07 conforming to IEC 62262运行温度-25…70 °C贮存环境温度-50…85 °C相对湿度0…95 %工作海拔0...2000 m 不降容2000 m...5000 m 有降容包装单位Unit Type of Package 1PCENumber of Units in Package 11Package 1 Height14.0 CmPackage 1 Width11.0 CmPackage 1 Length19.5 CmPackage 1 Weight 1.786 KgUnit Type of Package 2S03Number of Units in Package 27Package 2 Height30.0 CmPackage 2 Width30.0 CmPackage 2 Length40.0 CmPackage 2 Weight12.876 Kg可持续性产品类型Green Premium 产品China Green Designed Product是REACh法规REACh 声明欧盟ROHS指令符合豁免条件无汞是中国 ROHS 管理办法中国 ROHS 声明RoHS 豁免信息是环境披露产品环境文件流通资料产品使用寿命终期信息无 PVC是合同保修保修单18 个月Product Life Status :Commercialised。
ROYER线路原理介绍
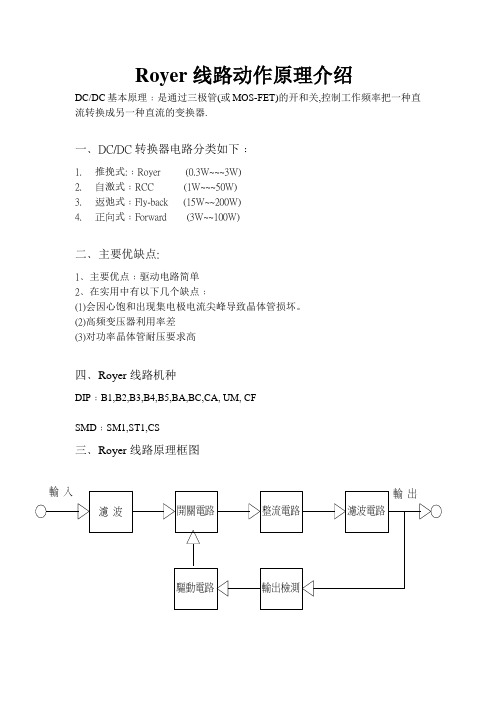
Royer线路动作原理介绍DC/DC基本原理﹕是通过三极管(或MOS-FET)的开和关,控制工作频率把一种直流转换成另一种直流的变换器.一﹑DC/DC转换器电路分类如下﹕1.推挽式:﹕Royer (0.3W~~~3W)2.自激式﹕RCC (1W~~~50W)3.返弛式﹕Fly-back (15W~~200W)4.正向式﹕Forward (3W~~100W)二﹑主要优缺点:1﹑主要优点﹕驱动电路简单2﹑在实用中有以下几个缺点﹕(1)会因心饱和出现集电极电流尖峰导致晶体管损坏。
(2)高频变压器利用率差五﹑Royer路原理1.电路原理:(以CEUS0509的线路作为实例解说)Royer的电路架构,原属西屋公司的专利,目前已经过期,一般称为:电子变压器,它是利用Q1、Q2及变压器饱和的原理,使初级侧产生Duty = 50 %的方波,利用变压器N1:N2=V1:V2的圈比关系,使次级端产生感应电压,当需要输出电压大一点,就把次级圈数绕多一点…….,基本电路如下:(a). 线路图(b). 铁心的B-H 曲线此處的面積大小與損失成正比(c). 施加于变压器N1、N2电感上的电压与磁通密度(a).令磁通为Φ,加在绕组N圈上的电压V,根据法拉第定律,可以下式表示:V = N *(dΦ/dt)……………………………………...(2-12)(b).将上式两边以半周期积分运算(所谓积分就是算这半周期T0~T1 之电压*时间的面积,就是常说的E-T常数),令Φ=B * Ae (磁通量=磁通密度* 截面积),则其公式如下:( 1/N ) * ∫V * dt = Ae * [ B ] ( +B => -B ) .…………..(2-13)积分的时间t 系介于0 ~T/2 (T0 ~T1)半个周期之内,此期间内之磁通密度变化,介于─B ~+B 的2B 范围内,由式子(2-13)可以求得( V * T ) /( 2 * N ) = 2 * Ae * B …………….……(2-14)V = 4 * N * Ae * B /T …………….……………(2-15)∵T = 2 * T ON ( Duty 50 % ) 及f =1 /TV = 2 * N * Ae * B /T ON………….………(2-15)V = 4 * N * Ae * B * f …………..…….…………(2-16)N =(V * T ON)/(2 * Ae * B )…………..…...(2-17)上式若磁通密度的单位为高斯(Gauss),Ae 的单位为cm2,则(2-16)式又可写作:V = 4 * N * Ae * B * f * 10 - 8…………..…….…………..(2-18)1.1.Q1启动:输入+5V经由R1=> N5、N6后分别接到Q1、Q2的基极(Base),假设Q1的V BE比较小,Q1先ON,启始I B电流流进Q1基极。
N39100 系列可编程直流电源用户手册说明书

N39100系列可编程直流电源1版权说明恩智(上海)测控技术有限公司(简称:恩智(NGI))未经恩智测控事先允许和书面同意,不得以任何形式(包括电子存储和检索或翻译为其他国家地区语言)复制本手册中的任何内容。
恩智测控对提供、使用或应用本文档及其包含的任何信息所引起的错误或偶发或间接损失概不负责。
本手册提供的信息如有变更,恕不另行通知,可以到本公司网站自行下载,网址为。
联系我们如果您对本产品有任何疑问,可根据以下方式与我们联系。
1、服务热线:400-966-23392、官方邮箱:****************3、恩智(NGI)网站:目录一、前言 (1)二、安全说明 (3)2.1安全须知 (3)2.2安全标志 (4)2.3使用环境 (5)三、产品介绍 (6)3.1简介 (6)3.1.1特点介绍 (6)3.2机型概览 (7)3.2.1基本参数 (7)3.2.2开箱检查 (7)3.2.3开机检查 (8)3.3机箱外观、尺寸 (9)3.4前面板介绍 (9)3.4.1按键旋钮介绍 (10)3.4.2显示屏介绍 (12)3.5后面板介绍 (14)3.5.1交流输入端口 (14)3.5.2直流输出端口 (15)3.5.3LAN端口 (15)3.5.4RS232端口 (16)3.5.5RS485端口 (17)3.5.6远端采样功能 (17)3.6产品接线 (18)3.6.1控制连接 (18)3.6.2二/四线制连接 (18)四、PC控制介绍 (20)4.1运行环境 (20)4.2与PC连接方法及准备工作 (20)4.2.1LAN口连接 (20)4.2.2禁止操作系统待机模式 (20)4.2.3设置网络IP地址段 (22)4.2.4更改仪器IP (26)五、功能及操作 (29)5.1电压电流模式 (29)5.2保护参数 (29)5.2.1过压保护 (30)5.2.2过流保护 (30)5.2.3过温保护 (31)六、维护与校准 (32)6.1保修服务 (32)6.2保修限制 (32)6.3日常维护 (32)6.4故障自检 (32)6.5返厂维修 (33)七、主要技术指标 (35)一、前言尊敬的用户:非常感谢您选择恩智(上海)测控技术有限公司(以下简称恩智(NGI))N39100系列可编程直流电源(以下简称N39100)。
负载使用类别ac,ac-与ac-以及ac-和dc-3的含义和区别
负载使用类别AC-1,AC-3与AC-4以及A C-15和DC-13的含义和区别是什么问题:负载使用类别AC-1,AC-3与AC-4以及AC-15和DC-13的含义和区别是什么?解答:负载使用类别用来表示接触器、隔离器、负荷隔离开关和开关熔断器组合装置等低压开关设备的用途与负载特性。
具体含义和区别如下:-----------------------------------------------------------使用类别????典型应用场合-----------------------------------------------------------AC-1????无感或低感负载、电阻炉交AC-3?????笼型异步电动机的起动、运转中分断(允许操作频率不超过每分钟5次和每10分钟10次的点动或反接制动)AC-4?????笼型异步电动机的频繁起动、反接制动或反向运转、点动流AC-15????大于72VA的电磁负载的控制-----------------------------------------------------------直DC-13????电磁铁的控制流-----------------------------------------------------------AC是指电气开关或控制设备下端所接的负载类别,一般是按照启动电流、感性电流进行划分,AC等级越高的相当于灭弧分断越困难,对开关的要求也越高。
所以低AC类别的开关用在高AC类别的地方必须要降容使用(如AC1的25A开关用在AC3负载只相当于9A了,但没有一个固定比例)使用中接触器的使用类别及典型负载1.使用类别见下表使用类别代号典型用途举例AC-1无感或微感负载、电阻炉AC-2绕线式感应电动机的起动、分断AC-3笼型感应电动机的起动、运转中分断AC-4笼型感应电动机的起动、反接制动或反向运转、点动AC-5a放电灯的通断AC-5b白炽灯的通断AC-6a变压器的通断AC-6b电容器组的通断AC-7a家用电器和类似用途的低感负载AC-7b家用的电动机负载AC-8a具有手动复位过载脱扣器的密封制冷压缩机中的电动机AC-8b具有自动复位过载脱扣器的密封制冷压缩机中的电动机2.典型负载不同的用电设备其负载性质和通断过程的电流变化相差很大,因此对接触器的要求也有所不同,常用的负载有以下数种:2.1电热元件负载对电热元件负载中用的线绕电阻元件,其接通电流可达额定电流的1.4倍,例如用于室内供暖,电烘箱及电热空调等设备。
DC-3实样及说明书(压缩版)

DC-ⅢS型自动操舵仪使用说明书上海航海仪器责任公司2010年1月目 录1 概述------------------------------------------------------------------------------------------ 32 主要技术参数------------------------------------------------------------------------------ 33 系统组成------------------------------------------------------------------------------------ 3 3.1 配套------------------------------------------------------------------------------------------ 33.2 必需的配套仪器--------------------------------------------------------------------------- 44 仪器组成------------------------------------------------------------------------------------ 4 4.1 主操舵台------------------------------------------------------------------------------------ 4 4.1.1 泵启动和报警模块------------------------------------------------------------------------ 4 4.1.2 电源开关和电源组件--------------------------------------------------------------------- 4 4.1.3 系统选择开关------------------------------------------------------------------------------ 4 4.1.4 主/辅转换开关--------------------------------------------------------------------------- 4 4.1.5 动力定位模块------------------------------------------------------------------------------ 4 4.1.6 操舵模式选择开关------------------------------------------------------------------------ 4 4.1.7 主操舵台应急操舵开关------------------------------------------------------------------ 5 4.1.8 主操舵台随动手轮模块-------- --------------------------------------------------------- 5 4.1.9 控制器Ⅰ和控制器Ⅱ报警模块--------------------------------------------------------- 5 4.1.10 显示器模块--------------------------------------------------------------------------------- 5 4.2 辅操舵台------------------------------------------------------------------------------------ 6 4.2.1 舵角指示器--------------------------------------------------------------------------------- 6 4.2.2 辅操舵台模式选择开关------------------------------------------------------------------ 7 4.2.3 辅操随动信号发送模块------------------------------------------------------------------ 7 4.2.4 舵机应急操舵开关------------------------------------------------------------------------ 7 4.2.5 操舵地点指示灯和调光旋钮------------------------------------------------------------ 7 4.3 舵角反馈器--------------------------------------------------------------------------------- 7 4.4 操舵控制箱--------------------------------------------------------------------------------- 74.5 舵机启动箱--------------------------------------------------------------------------------- 75 操作说明------------------------------------------------------------------------------------ 7 5.1 启动与停止--------------------------------------------------------------------------------- 7 5.1.1 启动------------------------------------------------------------------------------------------ 7 5.1.2 停止------------------------------------------------------------------------------------------ 7 5.2 控制系统选择------------------------------------------------------------------------------ 8 5.3 操舵位置选择------------------------------------------------------------------------------ 8 5.4 动力定位操舵模式选择------------------------------------------------------------------ 8 5.5 主操舵台操舵------------------------------------------------------------------------------ 8 5.5.1 主操舵台自动操舵------------------------------------------------------------------------ 8 5.5.2 主操舵台随动操舵------------------------------------------------------------------------ 10 5.5.3 主操舵台应急操舵------------------------------------------------------------------------ 10 5.6 辅操舵台操舵------------------------------------------------------------------------------ 10 5.6.1 辅操舵台随动操舵------------------------------------------------------------------------ 10 5.6.2 辅操舵台应急操舵------------------------------------------------------------------------ 1015.7 舵机舱操舵--------------------------------------------------------------------------------- 10 5.8 综合状态显示------------------------------------------------------------------------------ 10 5.8.1 显示器调光--------------------------------------------------------------------------------- 10 5.8.2 语言选择------------------------------------------------------------------------------------ 11 5.9 操舵仪的报警系统------------------------------------------------------------------------ 11 5.9.1 操舵台报警--------------------------------------------------------------------------------- 11 5.9.2 舵机警报------------------------------------------------------------------------------------ 115.9.3 操舵仪控制系统失电--------------------------------------------------------------------- 116 安装------------------------------------------------------------------------------------------ 117 试验------------------------------------------------------------------------------------------ 12 7.1 系泊试验------------------------------------------------------------------------------------ 127.2 航行试验------------------------------------------------------------------------------------ 128 安全和维护保养--------------------------------------------------------------------------- 139 备品与备件--------------------------------------------------------------------------------- 1310 保证事项------------------------------------------------------------------------------------ 13 附图1-------------------------------------------------------------------------------------------------- 14 附图2-------------------------------------------------------------------------------------------------- 142DC-ⅢS型自动操舵仪使用说明书1 概述Ⅲ是一款具有高稳定性,全数字化,功能完备,可扩展性好等显著特点DC-S的新型自动操舵仪。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
DC-N3/N3S彩色多普勒超声诊断仪
一.设备用途:
1、腹部、血管、妇产、四维、心脏、泌尿、小器官、儿科、TCD、介入及科研等中
高档的专业机。
★2、所投机型为2012年首次注册的全新机型(提供国家医药管理局注册证的日期为准)。
二.主要技术规格及要求:
1.主机系统性能:
★1.01操作系统:全中文操作系统,支持中文输入及中英文任意切换(提供中、英文界面及中文导航图片证明)
1.02多普勒能量图, 方向性能量图
★1.03连续多普勒成像单元(必备)
1.04组织多普勒成像单元:包括组织能量多普勒、组织频谱多普勒成像单元(可选配)
1.05组织多普勒定量分析(可选配)
1.06彩色M型成像单元
1.07解剖M型成像单元:取样线≥2条,支持对存储的动态图像进行解剖重构(可选
配)(提供取样线≥2条的证明图片)
★1.08空间复合成像技术,分档位可视可调节(提供曲别针实验证明图片)
1.09组织谐波成像
1.10二维彩色双实时显像技术
1.11四维成像单元:支持曲面成像、表面模式、最大模式等成像模式(可选配)
1.12实时宽景成像单元:扫描范围≥1M,具有纵横行向刻度标尺,可进行放大和测量
(可选配)(提供证明图片)
1.13多普勒血流测量及分析:多普勒频谱自动分析描记
1.14妇产科测量与分析:NT、胎儿生理评分
1.15监视器: 15寸高分辨率彩色液晶监视器,逐行扫描,可上下升降、左右旋转
★1.16 操作平台可升降、旋转(提供操作平台升降、旋转产品彩页)
1.17探头接口≥4个
★1.18 ≥5个USB接口
1.19一键无失真放大单元及全屏放大
2.探头规格
2.1探头频率:超宽频带探头,成像频率范围2.0MHZ—12.00MHZ
2.2探头类型:电子凸阵,电子线阵,电子相控阵
2.3二维及多普勒(B/D)兼用:电子扇形B/PWD及B/CWD; 线阵B/PWD; 凸阵B/PWD
2.4穿刺导向:可选配探头可配穿刺导向装置
3.二维灰阶显像主要参数:
3.1扫描
腹部凸阵: 超声频率2.5-5.0MHZ
电子线阵:超声频率5.0-11MHZ
电子相控阵:超声频率2-5MHZ
3.2扫描线:每帧线密度≥229超声线
3.3声速聚焦:发射:16级,接收自动连续动态聚焦
★3.4系统动态范围:≥160dB,可视可调(提供动态范围160dB图片证明)
★3.5最大显示深度:≥36cm(提供图片证明)
4.频谱多普勒
4.1方式:脉冲多普勒(PWD,HPRF);连续多普勒CWD
4.2多普勒探头与频率:线阵:PWD,HPRF;凸阵:PWD,HPRF;相控阵PWD,CWD
4.3最大测量速度:PWD:正或反向血流速度≥7.6m/s, CWD:血流速度≥18.0m/s
5.彩色多普勒
5.1显示方式: 速度方差显示、能量显示、速度显示、方差显示, 二维图像/频谱多普勒
/彩色血流成像三同步显示
★5.2彩色模式下线阵二维图像范围偏转:-20°~+20°(提供图片证明)
5.3增强功能: 彩色多普勒能量图(CDE)方向性能量图
6.语言界面、报告及输入功能
6.1全中文操作界面,中、英文注释输入
6.2带探头方向的体位标记≥85种
6.3预设条件:针对不同的检查脏器,预置最佳图像的检查条件
6.4电影回放: ≥95秒
★8.测量和分析
8.1一般测量:心功能测量;妇科及产科测量;外周血管测量;腹部测量;小器官测量
等
8.2特殊分析测量功能:
8.2.1 血管测量与分析:血管内中膜自动描记,支持前、后壁分别识别自动描记,
显示参数≥6项(选配)(提供前、后壁分别识别自动描记图片证明文件)
8.2.2 左室自动定量分析:自动描记心内膜,且具有手动修改功能,自动测量分析
出心室容积及每搏输出量等(提供辛普森法自动描记的菜单界面及自动描记图像
证明)
★三、配置要求:
1、全数字彩色超声诊断系统主机2台
2、腹部大凸探头2把
3、小器官浅表探头2把
4、相控阵心脏探头2把
★四、售后服务及其他
1、本地化服务:制造商具有在陕西省内工商行政部门注册的分公司或办事机构并设有维
修中心及配件库(提供营业执照副本复印件);保修2年。
2、客户服务2小时内响应,24小时内到位;
3、软件部分终身免费升级。
注:带“★”的项目为必备项目。