杠杆平衡条件的实验探究
探究杠杆的平衡条件试验报告
探究杠杆的平衡条件试验报告实验报告:探究杠杆的平衡条件一、实验目的:通过进行杠杆实验,探究杠杆的平衡条件,理解杠杆的物理原理。
二、实验器材:1.实验平台。
2.杠杆。
3.不同质量的砝码。
4.质量计。
5.实验吊钩。
6.实验手柄。
7.实验固定杆。
8.实验观察尺。
三、实验原理:杠杆是一个用来增强或改变力矩的装置。
杠杆可以由一个能够绕自己的轴旋转的支点分为两个部分,一部分是力臂,一部分是负载臂。
在平衡状态下,杠杆的转动力矩之和为零,即力臂乘以作用力的和等于负载臂乘以负载的和。
四、实验步骤:1.将实验平台放置在水平桌面上,并固定好。
2.将杠杆置于实验平台上的支点上,确保杠杆可以自由旋转。
3.在杠杆的一侧的力臂上,固定一个实验手柄,并将手柄上的固定杆插入杠杆的孔中。
4.通过质量计测量实验手柄的重量,并将该数值记录下来。
5.在杠杆的另一侧的负载臂上,固定一个实验吊钩,并调整吊钩的位置使其与支点在同一直线上。
6.往吊钩上加上一个初始重量,并记录下该重量。
7.往吊钩上分别加上不同质量的砝码,每次加完一个砝码后,记录下吊钩上的总重量。
8.测量并记录下杠杆的力臂和负载臂的长度。
9.反复加上不同质量的砝码,记录吊钩的总重量,直到杠杆保持平衡状态。
10.根据实验数据计算杠杆的平衡条件,并进行分析。
五、实验数据记录:实验手柄重量:______g(记录的值)初始负载重量:______g(记录的值)砝码质量(g)吊钩总重量(g)_______________________________________________________________________________________________________________________________________力臂长度:________cm(记录的值)负载臂长度:________cm(记录的值)六、实验结果和分析:根据实验数据计算杠杆平衡条件,即力臂与负载臂的力矩之和为零。
实验报告:探究杠杆平衡的条件
实验报告:探究杠杆平衡的条件一、实验目的1. 了解杠杆平衡的条件,验证杠杆原理;2. 学习使用杠杆实验器材,提高动手能力;3. 培养观察、分析、解决问题的能力。
二、实验原理杠杆平衡的条件:在一个平衡的杠杆系统中,力与力矩的乘积相等,即F1 ×L1 = F2 ×L2,其中F1和F2分别为作用在杠杆两端的力,L1和L2分别为力F1和F2到杠杆支点的距离。
三、实验器材与步骤1. 器材:杠杆实验器材(含杠杆、支点、钩码、弹簧测力计等);2. 步骤:(1)将杠杆固定在支点上,调节杠杆两侧的平衡螺母,使杠杆在水平位置平衡;(2)在杠杆左侧挂上钩码,记录钩码质量m1和对应的力F1,在杠杆右侧挂上钩码,记录钩码质量m2和对应的力F2;(3)测量力F1和F2到支点的距离L1和L2;(4)计算力矩M1和M2,比较M1和M2的大小,验证杠杆平衡条件;(5)重复步骤2-4,多组数据求平均值,提高实验结果的准确性。
四、实验数据与分析1. 实验数据:(1)m1 = 20g,F1 = 0.5N,L1 = 0.2m;(2)m2 = 30g,F2 = 0.7N,L2 = 0.3m;(3)m3 = 40g,F3 = 0.9N,L3 = 0.4m;……(5)mi = 100g,Fi = 2.0N,Li = 1.0m;2. 分析:(1)计算力矩M1和M2:M1 = F1 ×L1,M2 = F2 ×L2;(2)比较M1和M2的大小:M1 ≈M2;(3)根据实验数据,发现杠杆平衡时,力与力矩的乘积相等,验证杠杆平衡条件;(4)通过多组数据求平均值,提高实验结果的准确性。
五、实验结论通过实验探究,得出以下结论:1. 杠杆平衡的条件为:F1 ×L1 = F2 ×L2;2. 实验中,杠杆平衡时,力与力矩的乘积相等;3. 实验数据的平均值验证了杠杆平衡条件的正确性。
六、实验注意事项1. 实验过程中,要注意杠杆的平衡调节,避免杠杆倾斜;2. 测量力矩时,要准确记录力与力臂的大小;3. 多次实验,求平均值,提高实验结果的可靠性;4. 遵守实验规程,确保实验安全。
2024年中考物理实验专项突破(全国通用版):实验15 探究杠杆的平衡条件(解析版)
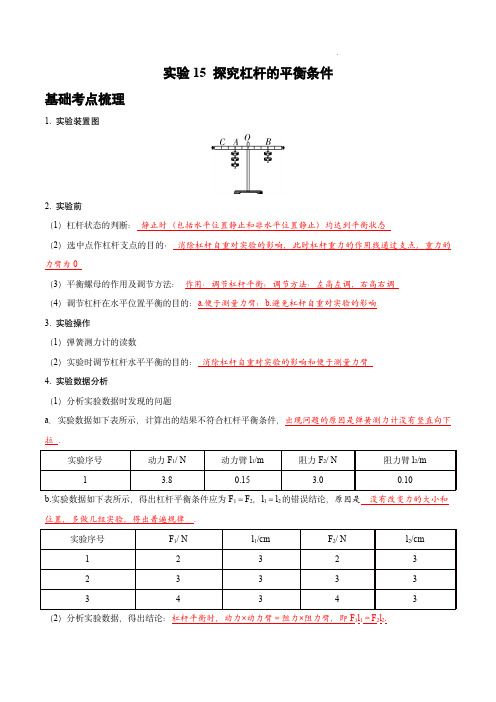
实验15探究杠杆的平衡条件基础考点梳理1.实验装置图2.实验前(1)杠杆状态的判断:静止时(包括水平位置静止和非水平位置静止)均达到平衡状态(2)选中点作杠杆支点的目的:消除杠杆自重对实验的影响,此时杠杆重力的作用线通过支点,重力的力臂为0(3)平衡螺母的作用及调节方法:作用:调节杠杆平衡;调节方法:左高左调,右高右调(4)调节杠杆在水平位置平衡的目的:a.便于测量力臂;b.避免杠杆自重对实验的影响3.实验操作(1)弹簧测力计的读数(2)实验时调节杠杆水平平衡的目的:消除杠杆自重对实验的影响和便于测量力臂4.实验数据分析(1)分析实验数据时发现的问题a.实验数据如下表所示,计算出的结果不符合杠杆平衡条件,出现问题的原因是弹簧测力计没有竖直向下拉.实验序号动力F1/N动力臂l1/m阻力F2/N阻力臂l2/m1 3.80.15 3.00.10b.实验数据如下表所示,得出杠杆平衡条件应为F1=F2,l1=l2的错误结论,原因是没有改变力的大小和位置,多做几组实验,得出普遍规律.实验序号F1/N l1/cm F2/N l2/cm 123232333334343(2)分析实验数据,得出结论:杠杆平衡时,动力×动力臂=阻力×阻力臂,即F1l1=F2l2.5.多次实验的目的:让结论具有普遍性,避免偶然性.6.杠杆平衡条件的应用(根据F1l1=F2l2)(1)要使杠杆达到平衡状态,判断另一端钩码的数量或需要移动的位置.(2)杠杆平衡时,在杠杆两边同时加减相同的钩码或将两边的钩码移动相同的距离,判断杠杆向哪端倾斜.7.实验时将一端的钩码换成弹簧测力计(如图)(1)优点:能直接测量出拉力的大小,实验操作更方便.(2)操作注意事项①实验时弹簧测力计应该沿竖直方向拉杠杆,沿竖直方向拉的目的是方便读出或测出力臂的大小.斜拉也可以达到实验目的,但是力臂的大小不好测量.②弹簧测力计使用前需重新调零.(3)保持钩码的数量和位置不变,弹簧测力计竖直拉与倾斜拉的相关判断①如果只将弹簧测力计从竖直拉杠杆变成倾斜拉杠杆,则弹簧测力计的示数变大,这是因为拉力的力臂变小,如图中l1<l2.②竖直向下拉时,拉力最小.③不管竖直拉还是倾斜拉,拉力与其力臂的乘积不变.8.实验结论拓展:杠杆在两个力的作用下平衡时,F1l1=F2l2,此时动力作用的效果与阻力作用的效果互相抵消.如果杠杆受到动力F1、F2和阻力F3三个力的作用,杠杆的平衡条件是F1l1+F2l2=F3l3典型例题赏析实验结论:杠杆的平衡条件:动力×动力臂=阻力×阻力臂(F1l1=F2l2)1.在做“探究杠杆的平衡条件”的实验时.(1)将装置放在水平桌面上,静止时如图甲所示,为使杠杆在水平位置平衡,应将平衡螺母向__右___(选填“左”或“右”)调节,这样操作是为了消除杠杆自重对实验的影响.要点1.平衡螺母的调节:实验前杠杆左高左调,右高右调,实验过程中不能调节平衡螺母.(2)小明挂上钩码并调节钩码的位置,使杠杆水平平衡,在下表中记录数据,然后改变钩码的数量和钩码的位置重复上述实验,其目的是让实验结论更具有普遍性.第1、2次杠杆平衡时的数据已填入下表,图乙是第3次杠杆平衡时的情景,此次杠杆右侧的阻力和阻力臂的数据为__1__、为___0.15__.实验次数动力F1/N动力臂l1/m阻力F2/N阻力臂l2/m1 2.50.220.25220.15 1.50.23 1.50.1①②要点2.结论普遍性的操作:应多次改变动力或阻力的大小、作用点(位置)、方向.(3)分析实验数据,可归纳出杠杆的平衡条件:F1L1=F2L2.(4)(科学推理)(2022安徽)第3次实验后,小明用带杆的滑轮水平向左缓慢推动右侧悬挂的悬线(保持上端悬点不动),如图乙,不计摩擦,杠杆不能(选填“能”或“不能”)在水平位置保持平衡,原因是由于力不变,但力臂减小.要点3.关键点解读:滑轮推动悬线实质改变的是力的方向,没改变力的大小,力的方向改变则力臂变小(5)(2022宜宾)如图丙所示,由杠杆的平衡条件可知杠杆的左(选填“左”或“右”)端会下沉;要使杠杆重新在水平位置平衡,在不改变两侧钩码各自数量的前提下,仅需把左侧钩码向右移动一格.(6)(装置改进)(2022河南)实验小组对探究过程交流、讨论后,按图丁所示又进行了实验,老师肯定了他们的做法,并指出用弹簧测力计斜拉也能避免得出“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”的结论,因为这样做改变了拉力方向总是和杠杆垂直的情况.在测量拉力F的力臂时,小组内有不同的意见,你认为拉力F的力臂应为OB(选填“OA”“OB”或“AB”).要点4.将钩码换成弹簧测力计的优点:可以连续改变拉力的方向、直接读出力的大小.注:力臂是支点到力的作用线的距离.(7)(支点位置对结论影响)(2021湘潭)实验时,不再调节平衡螺母,使杠杆的中心位置保持在O点不变,将支点换到O′点,如图戊所示,发现A点处只挂1个钩码,杠杆仍然保持平衡,若每个钩码的重为0.5N,则杠杆重力为__0.5___N,由此可知,将杠杆支点设在__O_(选填“O”或“O′”)点进行实验,能避免杠杆自身重力影响实验结论的得出.要点5.杠杆的中点作为支点:使得杠杆的重心落在支点上,避免杠杆自重对实验结论产生影响.(8)(宽杠杆问题)(2021陕西)如图己是一个加宽的杠杆装置,此时杠杆处于平衡状态,若只将左侧的钩码改挂到A点正上方的B点,力臂是线段___OB___(选填“OA”“OB”或“AB”),此时杠杆__仍能____(选填“仍能”或“不能”)保持平衡.(9)(科学论证)(2022益阳)当货车所载货物重心太靠后时,货车会翘起来,如图庚所示,这样容易造成交通安全事故.若以后轮为支点,货物对货车压力F的力臂用l1表示,货车重力G的力臂用l2表示,货车之所以会翘起来,是因为Fl1__>__Gl2.(选填“>”“<”或“=”)2.小明利用杠杆做“探究杠杆的平衡条件”实验;(1)实验前,杠杆处于静止状态如图甲所示,此时杠杆是平衡状态(填“是”或“不是”),为了使杠杆在水平位置平衡,应将平衡螺母向左调,此时调节杠杆水平位置平衡的目的是便于测量力臂,消除杠杆重对实验的影响;(2)杠杆调平衡后,在左侧A位置挂上钩码,且保持左侧悬挂钩码的位置和数量不变(如乙图),调节右侧悬挂钩码的数量和位置,使杠杆始终在水平位置平衡,记录对应的力F和力臂L1大小,绘制成图像如图丙所示。
探究杠杆的平衡条件实验注意事项

探究杠杆的平衡条件实验注意事项杠杆是一种简单而重要的物理工具,被广泛应用于各个领域。
它可以通过改变力的大小和方向来实现物体的平衡。
为了探究杠杆的平衡条件,我们可以进行一些简单的实验。
我们需要准备一根杠杆、一个支点和一些质量相同的物体。
杠杆可以是任何具有一定长度和刚性的物体,比如木棍或金属杆。
支点可以是一个固定的点或一个支架,用于使杠杆可以旋转。
质量相同的物体可以是一些小砝码或任何具有相同质量的物品。
在实验中,我们需要将杠杆放在支点上,并在杠杆的两端悬挂质量相同的物体。
为了保持平衡,我们需要调整物体的位置,使得杠杆保持水平,并且两端的力相等。
在进行实验时,有几个注意事项需要我们注意。
首先,我们需要确保杠杆和支点的质量可以忽略不计,以便更好地观察平衡条件。
其次,我们需要确保杠杆的长度足够长,以便在调整物体位置时可以更准确地控制平衡。
同时,我们也需要确保杠杆具有足够的刚性,以避免在实验过程中出现弯曲或变形。
我们还需要注意测量力的方法。
在实验中,我们可以使用弹簧秤或称重器等工具来测量物体悬挂的力大小。
在进行测量时,我们需要确保测量的准确性和可靠性,避免测量误差对实验结果的影响。
在调整杠杆平衡时,我们可以尝试不同位置的物体悬挂点,并观察杠杆是否保持平衡。
当杠杆达到平衡时,我们可以发现两端的力大小相等,且方向相反。
这就是杠杆平衡的条件。
除了调整物体位置,我们还可以改变物体的质量来探究杠杆平衡的条件。
当物体的质量增加时,我们需要调整悬挂点的位置,以保持平衡。
通过实验,我们可以验证杠杆平衡的条件与物体的质量和位置有关。
在实验过程中,我们还需要注意安全问题。
首先,确保实验场地的安全,避免杠杆碰到其他物体或人。
其次,注意小心操作,避免物体掉落或杠杆突然失去平衡导致意外发生。
探究杠杆的平衡条件需要进行一系列实验,并注意实验过程中的各种细节和注意事项。
通过观察和测量,我们可以深入了解杠杆平衡的条件,并进一步应用于实际生活和工程领域中。
探究杠杆平衡条件实验报告
探究杠杆平衡条件实验报告探究杠杆平衡条件实验报告引言:杠杆平衡条件是物理学中一个重要的概念,它描述了一个物体在平衡状态下所满足的条件。
通过实验,我们可以更深入地了解杠杆平衡条件的原理和应用。
本文将探究杠杆平衡条件的实验过程和结果,并对实验结果进行分析和讨论。
实验目的:通过实验验证杠杆平衡条件,并观察杠杆平衡时的现象。
实验器材:1. 杠杆2. 支点3. 物体(如砝码)4. 测力计5. 尺子实验步骤:1. 将杠杆放置在支点上,确保杠杆可以自由旋转。
2. 在杠杆的一侧悬挂一个物体(如砝码),并调整位置,使其与支点之间的距离为d1。
3. 在杠杆的另一侧使用测力计,将其固定在杠杆上,并调整位置,使其与支点之间的距离为d2。
4. 逐渐增加或减小测力计的读数,直到杠杆平衡。
5. 记录测力计的读数,并测量d1和d2的值。
实验结果:在实验过程中,我们观察到以下现象:1. 当测力计的读数增加时,杠杆的平衡点向物体一侧移动。
2. 当测力计的读数减小时,杠杆的平衡点向物体另一侧移动。
3. 当测力计的读数等于零时,杠杆保持平衡状态。
实验分析:根据实验结果,我们可以得出以下结论:1. 杠杆平衡条件成立,即杠杆在平衡状态下满足力矩平衡条件。
2. 在杠杆平衡时,杠杆两侧的力矩相等。
3. 杠杆平衡的位置取决于物体与支点之间的距离和施加在杠杆上的力的大小。
实验讨论:通过本次实验,我们深入了解了杠杆平衡条件的原理和应用。
杠杆平衡条件在日常生活中有着广泛的应用,例如梯子的平衡、剪刀的平衡等。
了解杠杆平衡条件可以帮助我们更好地理解这些现象。
然而,实验中可能存在一些误差。
首先,测力计的读数可能存在一定的误差。
其次,杠杆和支点的摩擦力也可能对实验结果产生一定的影响。
为了减小误差,我们可以使用更精确的测力计和尺子,并在实验中尽量减少杠杆和支点的摩擦。
结论:通过本次实验,我们验证了杠杆平衡条件,并观察到了杠杆平衡时的现象。
实验结果表明,杠杆平衡条件成立,并且杠杆平衡的位置取决于物体与支点之间的距离和施加在杠杆上的力的大小。
中考物理必考实验精解精练专题实验16探究杠杆平衡条件的实验含解析

实验16探究杠杆平衡条件的实验考点聚焦经典例题1.(2019•百色)在探究“杠杆平衡的条件”实验中,所用的实验器材有:杠杆(每小格均等长)、铁架台、刻度尺、细线和若干个重为1N的钩码。
(1)为了便于测量力臂要将如图甲所示杠杆调节在水平位置平衡,应将平衡螺母适当往(选填“左"或“右")调;丁所示,以两边钩码的重力分别为动力F1和阻力F2,对应的力臂为L1和L2,由此可得杠杆的平衡条件为:。
实验中进行多次实验的目的是(选填“A”或“B”):A.取平均值减少误差B.使实验结论具有普遍性(3)将如图丁所示杠杆两边的钩码各撤掉1个,则杠杆(选填“保持平衡”、“左端下沉”或“右端下沉”);(4)如图1所示,用细绳竖直向上拉,使杠杆在水平位置平衡,则拉力F为N;保持杠杆平衡,将细绳转到虚线位置时,拉力F大小将(选填“变大"、“不变”或“变小”);(5)在生活、生产中经常应用到杠杆的平衡条件,例如用天平测量物体的质量。
某次用天平测量物体质量时,如图2所示,则物体的质量为g。
【答案】(1)右;(2)F1L1=F2L2(动力×动力臂=阻力×阻力臂); B;(3)左端下沉;(4)1;变大;(5)72【解析】(1)由图知,右端偏高,为使杠杆在水平位置平衡,需要将平衡螺母向右调节;丁所示,以两边钩码的重力分别为动力F1和阻力F2,对应的力臂为L1和L2,分析上述数据,可得出的杠杆的平衡条件是:F1l1=F2l2(或动力×动力臂=阻力×阻力臂);本题为探究性实验,实验中多次实验,是为了得出普遍性结论,避免偶然性,故选B;(3)如图丁所示杠杆两边的钩码各撤掉1个,左端:2G×4L=8GL,右端:G×6L=6GL,左端大于右端,故左端下沉;(4)设杠杆每个格的长度为L,每个钩码的重力为G=1N,根据杠杆的平衡条件:F1L1=F2L2,2G•2L=F•4L,解得F=G=1N,保持杠杆平衡,将细绳转到虚线位置时,拉力F向左倾斜时,此时F的力臂变短,根据杠杆的平衡条件,力变大;(5)在天平的标尺上,1g之间有5个小格,一个小格代表的质量是0.2g,被测物体的质量为50g+20g+2g=72g。
探究杠杆的平衡条件实验报告
探究杠杆的平衡条件实验报告实验目的:通过进行杠杆的平衡条件实验,了解杠杆平衡的条件和原理。
实验原理:杠杆是一种简单机械原理,通过一个固定的支点,将输入力或力矩转化为输出力或力矩。
杠杆平衡的条件是,杠杆两边的力矩相等。
力矩是由力的大小和作用点到支点的距离决定的。
即F1*d1=F2*d2实验器材:1.杠杆支架2.两个不同质量的挂物3.悬挂重物的线4.尺子5.弹簧测力计实验步骤:1.将杠杆支架稳定地放置在水平桌面上,调整好平衡。
2.将一个挂物悬挂在杠杆的一侧,并记录其离支点的距离为d13.移动另一侧的挂线,直到杠杆平衡。
4.记录第二个挂物的距离d25.使用尺子测量d1和d2的值,并记录下来。
6.使用弹簧测力计分别测量挂物的重量F1和F2,并记录下来。
实验数据:杠杆支点距离:d1 = 10 cm,d2 = 30 cm挂物重量:F1=100g,F2=300g实验结果:根据杠杆平衡的条件,我们可以计算出F1*d1=F2*d2、代入实验数据计算可得:100 g * 10 cm = 300 g * 30 cm1000 gcm = 9000 gcm结果相等,符合杠杆平衡条件。
实验讨论:通过实验,我们验证了杠杆平衡的条件。
杠杆的平衡取决于力的作用点与支点的距离,而不仅仅是力的大小。
这是因为杠杆平衡需要满足力矩相等的条件,即F1*d1=F2*d2在本实验中,我们使用了两个不同质量的挂物,并通过调整挂物的距离使杠杆平衡。
根据杠杆平衡的原理,我们可以通过调整不同挂物的距离来平衡杠杆,而不仅仅是通过增加或减少挂物的重量。
实验中的误差可能来自于测量距离和重量的不准确。
因此,在进行实验时,我们应该仔细测量和记录相关数据,并注意使用准确的测量工具。
总结:通过杠杆平衡条件实验,我们了解了杠杆平衡的条件和原理。
杠杆平衡取决于力的大小和作用点到支点的距离,通过调整不同挂物的距离可以平衡杠杆。
在实际应用中,杠杆原理被广泛应用于很多领域,如天平、绳索电梯等。
【杠杆的平衡条件及其应用】杠杆平衡条件
【杠杆的平衡条件及其应用】杠杆平衡条件【杠杆的平衡条件及其应用】杠杆平衡条件1.探究杠杆的平衡条件(1)杠杆平衡是指杠杆处于静止状态或匀速转动.(2)实验前:应调节杠杆两端的螺母,使杠杆在水平位置平衡,这样做的目的是:可以消除杠杆自重对实验结果的影响;实验中:应调节杠杆两端的钩码的个数或位置,使杠杆在水平位置平衡,这样做的目的是:可以方便地从杠杆上直接量出力臂.(3)结论:杠杆的平衡条件(或杠杆原理)是:动力×动力臂=阻力×阻力臂.写成公式是:F1l1=F2l2,也可写成:F1/F2=l2/l1.2.杠杆平衡条件的应用方法(1)确认杠杆及其七要素.(2)利用公式F1l1=F2l2及变形公式F1=F2l2/l1解题.(3)要统一,即动力和阻力的单位要统一,动力臂和阻力臂的单位要统一,并不一定要用米,可以是厘米.3.典型题例(1)最小力问题例1如图1,一端弯曲的杠杆,O为支点,在B端挂一重为10N 的重物G,OB=AC=4cm,OC=3cm,在A端加一个作用力使杠杆平衡,这个力的最小值可能是().A.10NB.8NC.13.3ND.5N解析根据杠杆的平衡条件:F1l1=F2l2,因F2l2一定,则F1l1一定,所以l1越大,F1越小.由图2可知,OA是最长动力臂.由OA2 =OC2+AC2,AC=4cm,OC=3cm,则OA=5cm.由G·OB=F·OA,G=10N,OB=4cm,OA=5cm,则F=8N.故选项B正确.答案 B方法技巧实际生活中常遇到杠杆的最小力问题,注意要从实物中抽象出杠杆模型.解此类问题,关键是找到最长的动力臂,找到最小力的作用点和方向.解题时要明确两点:(1)明确已知条件(此题中尤其要注意动力臂和阻力臂的确定).(2)明确解题原理(F1l1=F2l2),解题时先把已知条件列出,再将已知条件代入公式解题.(2)杠杆的再平衡问题例2如图3,杠杆挂上钩码后刚好平衡,每个钩码的质量相同,在下列情况中,杠杆还能保持平衡的是().A.左右砝码各向支点移一格B.左右各减少一个砝码C.左右各减少一半砝码D.左右各增加两个砝码解析根据杠杆平衡条件,原来杠杆左边是2×4,右边是4×2,左右相等,杠杆平衡.情况变化后,A项的做法使左边是2×3,右边是4×1,杠杆不再平衡;B项的做法使左边是1×4,右边是3×2,杠杆不再平衡;D项的做法使左边是4×4,右边是6×2,杠杆不再平衡;C项的做法使左边是1×4,右边是2×2,杠杆平衡.故只有选项C正确.方法技巧杠杆的再平衡问题的特点是:原来杠杆是平衡的,当动力和阻力同时增减相等的力ΔF或动力臂和阻力臂同时增减相等的力臂ΔL时,杠杆不能平衡(等臂杠杆除外).(3)杠杆的动态平衡问题例3如图4所示,用始终与杠杆垂直的力F,将杠杆缓慢地由位置A拉至位置B,阻力G的力臂,动力F.(选填“变大”“变小”或“不变”)解析分别画出杠杆在A、B两位置的阻力G的力臂可看出,阻力臂lG将变大,由于F的方向始终与杠杆垂直,所以F的力臂始终等于杠杆长,故F的力臂lF不变.根据公式F×lF=G×lG,∵lF、G不变,lG变大,∴F变大.答案变大变大方法技巧杠杆的动态平衡是较为复杂的问题,实质在于考查杠杆的平衡条件和力臂的物理意义.解决的关键是明确哪些量变化,哪些量不变,先假设杠杆在某处静止,再用变动为静的处理方法.(4)杠杆与滑轮的组合问题例4如图5所示,质量为m的人站在轻质木板AB的中点,木板可以绕B端上下转动,要使木板静止于水平位置,人拉轻绳的力的大小为(摩擦阻力忽略不计).解析本题由于将杠杆与滑轮进行了组合,所以增加了分析思考问题的难度,木板可绕B端转动,说明B点为杠杆的支点,设人拉绳子的力为F,则由于天花板上的两个滑轮均为定滑轮,它们只能改变力的方向,不能改变力的大小,故A端所受绳子的拉力为F,方向竖直向上.人对杠杆的压力是G人-F.根据杠杆的平衡条件有:F·AB =(G人-F)·A B/2,F·AB=(mg-F)·AB/2,F=mg/3.答案mg/3方法技巧首先必须正确分析出作用在杠杆上的动力和阻力的大小,然后才能用杠杆平衡的条件得出答案.(5)实验探究过程中的经典问题例5在“研究杠杆平衡条件”的实验中,为了,应让杠杆在水平位置平衡.若实验前杠杆的位置如图6(甲)所示,欲使杠杆在水平位置平衡,则杠杆左端的平衡螺母应向(选填“左”或“右”)调.该实验得出的结论是:.某同学进一步用图6(乙)装置验证上述结论,若每个钩码重0.5N,当杠杆在水平位置平衡时,弹簧测力计的读数将4N(选填“<”“>”或“=”).解析经典实验通常是作为大的实验题来考的,问题多、分值大.今后中考也可能这样变化,为提高实验的覆盖面,一些重点实验将瘦身,问题减少,分值变小.但无论如何变形,其中的经典问题依然是命题的热点.杠杆不在水平位置平衡的话,杠杆本身的重力G杆对支点的力臂就不为零,这样会影响实验结论的正确得出.图甲所示的杠杆,左端下沉,右端上翘,说明左边偏重,应将平衡螺母向右调.若弹簧测力计竖直向下拉,则根据杠杆平衡的条件有:4G 钩·4l=F·2l,F=8G钩=8×0.5N=4N.弹簧测力计斜过来拉,力臂变短,力变大,应大于4N.答案消除杠杆自重对实验结果的影响(或使杠杆本身的重力对支点的力臂为0);右;动力×动力臂=阻力×阻力臂(或F1·l1=F2·l2);>.方法技巧探究杠杆平衡条件的题型,往往考查实验器材、过程、数据分析、结论以及对实验的反思.本题考查对实验注意事项的理解,要反思不注意这些事项的后果.许多同学只知道杠杆要在水平位置平衡,不清楚杠杆为什么要在水平位置平衡,阅读了这道题的解析后应该明白问题的答案了.(6)生产与生活中的杠杆问题例6商店里常用案秤称量货物质量,如图7所示,称量时,若在秤盘下粘一块泥,称量的结果比实际质量(选填“大”或“小”);若砝码磨损了,称量的结果比实际质量(选填“大”或“小”);若调零螺母的位置比正确位置向右多旋进了一些,称量的结果比实际质量.(选填“大”或“小”)解析案秤是一不等臂的杠杆,若秤盘下粘一块泥,相当于物体质量增大,此时就要增加砝码来平衡增加的物体,则读数就要比物体的实际质量大;若砝码磨损了,则砝码的质量比它实际的质量要小,用它去平衡物体时仍按其上标的示数进行读数,则结果比物体的实际质量大;若调零螺母的位置比正确位置向右多旋进了一些,则左侧的力与力臂的乘积减小,由于右侧的力臂不变,只有砝码的质量减小,此时称量的结果比实际量小.答案大大小方法技巧案秤的使用实质为教材中天平的使用的迁移,同学们一定要灵活运用所学的知识去解决实际问题.。
杠杆平衡实验验证杠杆平衡条件

杠杆平衡实验验证杠杆平衡条件杠杆平衡实验是一种经典的物理实验方法,用来验证杠杆平衡条件。
杠杆平衡条件是指在平衡状态下,杠杆两边的力矩之和为零。
这个实验可以通过不同的方法和工具来进行,下面将介绍几种常用的杠杆平衡实验方法和实验装置。
首先,我们可以通过使用一个简单的杠杆平衡实验装置来验证杠杆平衡条件。
这个实验装置包括一个支点和两个物体(甲、乙)。
通过调整物体(甲)的位置,可以改变杠杆的长度和杠杆两边的力矩。
我们可以测量物体(甲)的质量和位置,并通过改变物体(乙)的位置来达到杠杆平衡。
如果在物体(甲)和支点之间存在一个平衡点,物体(乙)的质量和位置可以相应地调整,使得杠杆平衡。
通过实验观察和记录,我们可以验证杠杆平衡条件是否成立。
此外,我们还可以通过悬挂实验来验证杠杆平衡条件。
这个实验方法中,我们可以利用一个悬挂装置和一些重物来构建一个简单的杠杆系统。
我们可以将重物分别挂在杠杆的两边,并调整重物的位置和质量来达到平衡。
通过测量杠杆长度、两边重物的质量和位置等参数,并对实验结果进行分析,我们可以验证杠杆平衡条件是否成立。
除了上述实验方法,我们还可以利用数学模型来验证杠杆平衡条件。
在理论模型中,我们可以通过杠杆平衡条件和其他物理定律来推导出一个方程。
通过对该方程进行求解,我们可以得到杠杆平衡的解析解。
将实验观测到的参数代入该方程,我们可以计算出杠杆平衡的理论值。
通过比较理论值和实验值的差异,我们可以验证杠杆平衡条件的准确性和有效性。
综上所述,杠杆平衡实验是验证杠杆平衡条件的重要方法。
通过选择适当的实验装置和方法,我们可以准确地验证杠杆平衡条件的成立。
这些实验方法不仅可以用于教学和学术研究,还可以应用于现实生活中的工程设计和力学分析等领域。
通过深入研究和应用杠杆平衡实验方法,我们可以更好地理解和应用杠杆平衡条件。
探究杠杆的平衡条件实验报告
探究杠杆的平衡条件实验报告实验目的:实验原理:杠杆是一种简单机械装置,由杠杆臂和支点组成。
杠杆的平衡条件可以通过杠杆的力矩平衡来描述。
力矩平衡是指杠杆的力矩的和为零,即力矩的乘积等于力的乘积。
根据力矩平衡原理,可以得出杠杆的平衡条件为“左力乘左力臂等于右力乘右力臂”。
实验器材:1.杠杆臂2.支点3.锚点4.重物5.细线6.尺子7.钳子实验步骤:1.将支点固定在桌子上,确保杠杆稳定。
2.将杠杆臂与支点连接,并将锚点固定在杠杆臂上。
3.在杠杆臂的另一侧,挂上重物,用细线将重物与杠杆臂固定。
4.使用尺子测量左力臂和右力臂的长度。
5.调整锚点的位置,使得杠杆保持平衡。
6.测量左力和右力的大小,以及杠杆的长度。
7.重复实验多次,记录实验数据。
实验数据和结果:实验数据表明,通过调整锚点的位置,可以使杠杆保持平衡。
左力臂乘以左力等于右力臂乘以右力。
根据实验数据计算得出的力矩平衡结果与理论预期相符。
实验讨论与分析:1.实验表明,杠杆的平衡条件可以通过力矩平衡来解释。
根据力矩平衡原理,可以得出杠杆的平衡条件为“左力乘左力臂等于右力乘右力臂”。
2.在实验过程中,我们发现调整锚点的位置可以使杠杆保持平衡。
这表明杠杆的平衡与支点的位置有关,支点越靠近重物一侧,杠杆越容易平衡。
实验结论:通过实验我们探究了杠杆的平衡条件,并发现可以通过力矩平衡来解释杠杆的平衡。
实验结果与理论预期相符。
实验总结:本次实验通过搭建杠杆实验装置,探究了杠杆的平衡条件。
实验结果与理论预期相符,验证了力矩平衡原理在杠杆上的适用性。
实验过程中我们还发现杠杆的平衡与支点的位置有关,支点越靠近重物一侧,杠杆越容易平衡。
这个实验让我们更深入地理解了杠杆的原理和应用。
2020年中考物理重点实验复习 探究杠杆平衡条件的实验
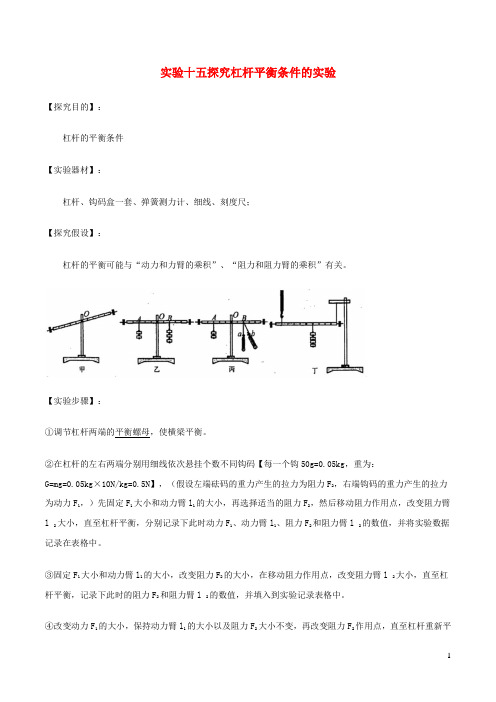
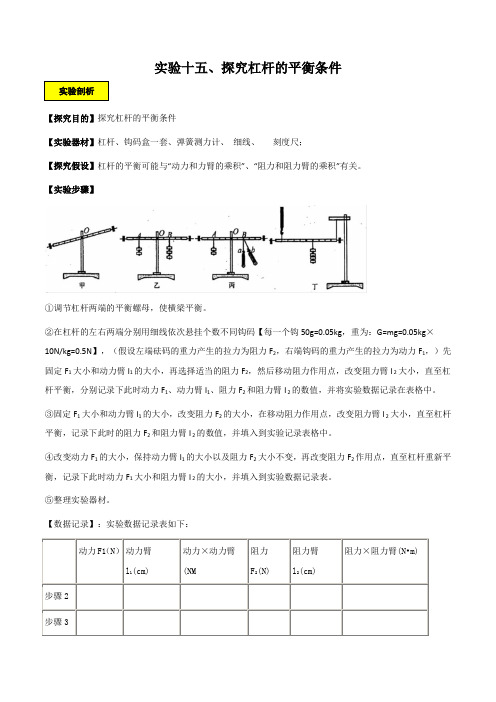
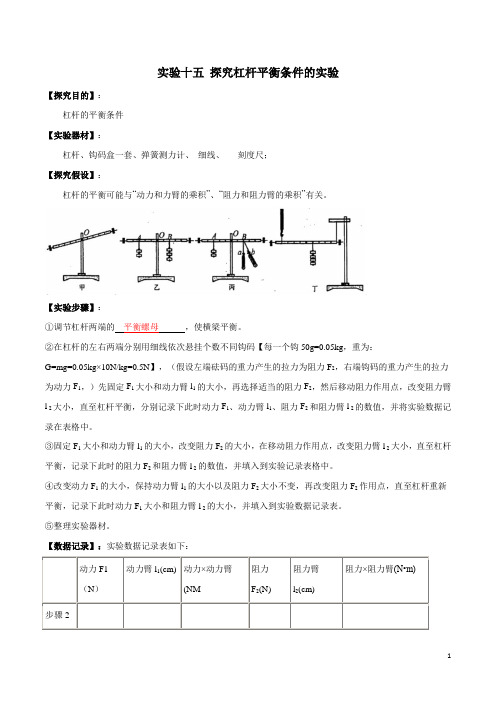
实验十五探究杠杆平衡条件的实验【探究目的】:杠杆的平衡条件【实验器材】:杠杆、钩码盒一套、弹簧测力计、细线、刻度尺;【探究假设】:杠杆的平衡可能与“动力和力臂的乘积”、“阻力和阻力臂的乘积”有关。
【实验步骤】:①调节杠杆两端的平衡螺母,使横梁平衡。
②在杠杆的左右两端分别用细线依次悬挂个数不同钩码【每一个钩50g=0.05kg,重为:G=mg=0.05kg×10N/kg=0.5N】,(假设左端砝码的重力产生的拉力为阻力F2,右端钩码的重力产生的拉力为动力F1,)先固定F1大小和动力臂l1的大小,再选择适当的阻力F2,然后移动阻力作用点,改变阻力臂l2大小,直至杠杆平衡,分别记录下此时动力F1、动力臂l1、阻力F2和阻力臂l2的数值,并将实验数据记录在表格中。
③固定F1大小和动力臂l1的大小,改变阻力F2的大小,在移动阻力作用点,改变阻力臂l2大小,直至杠杆平衡,记录下此时的阻力F2和阻力臂l2的数值,并填入到实验记录表格中。
④改变动力F1的大小,保持动力臂l1的大小以及阻力F2大小不变,再改变阻力F2作用点,直至杠杆重新平衡,记录下此时动力F1大小和阻力臂l2的大小,并填入到实验数据记录表。
⑤整理实验器材。
【数据记录】:实验数据记录表如下:【实验结论】:根据实验记录数据,探究结论是:动力×动力臂=阻力×阻力臂公式表示: F1L1=F2L2思考:在上述探究实验中,为什么每次都要使杠杆在水平位置保持平衡?答:可以方便用刻度尺来直接测出实验中杠杆的力臂大小【考点方向】:1、实验前杠杆的调节:左高右调,右高左调。
平衡后实验过程中不能在调节平衡螺母。
2、将杠杆调成水平平衡的目的是:便于测量力臂3、选择杠杆终点作为支点的好处:消除杠杆自身重力对实验的影响。
4、将砝码换成测力计的好处是:能直接测出拉力的大小,实验操作方便。
5、将砝码换成测力计的缺点是:测力计本身有重量,对实验有一定的影响,使弹簧测力计的示数变大。
探究:杠杆的平衡条件实验报告绝对

探究:杠杆的平衡条件
作者:广西崇左市桐中梁洪章
一、探究目的:杠杆的平衡条件
二、实验器材:杠杆、钩码盒一套、弹簧测力计、细线、刻度尺
三、探究假设:杠杆的平衡可能与“动力和力臂的乘积”、“阻力和阻力臂的乘积”有关。
四、实验步骤:步骤1、调节杠杆两端的平衡螺母,使横梁平衡。
步骤2、在杠杆的左右两端分别用细线依次悬挂个数不同钩码【每一个钩码50g=0.05kg,重为:
G=mg=0.05kg×10N/kg=0.5N】,(假设左端砝码的重力产生的拉力为阻力F2,右端钩码的重力产生的拉
力为动力F1,)先固定F1大小和动力臂l1的大小,再选择适当的阻力F2,然后移动阻力作用点,改变阻力臂l?2大小,直至杠杆平衡,分别记录下此时动力F1、动力臂l1、阻力F2和阻力臂l?2的数值,并将实
验数据记录在表格中。
步骤3、固定F1大小和动力臂l1的大小,改变阻力F2的大小,在移动阻力作用点,改变阻力臂l?2大小,直至杠杆平衡,记录下此时的阻力F2和阻力臂l?2的数值,并填入到实验记录表格中。
步骤4、改变动力F1的大小,保持动力臂l1的大小以及阻力F2大小不变,再改变阻力F2作用点,直至杠杆重新平衡,记录下此时动力F1大小和阻力臂l?2的大小,并填入到实验数据记录表。
步骤5、整理实验器材。
五、数据记录:实验数据记录表如下:
六、分析论证:根据实验记录数据,探究结论是:动力×动力臂=阻力×阻力臂公式表示:
F1L1=F2L2
思考:在上述探究实验中,为什么每次都要使杠杆在水平位置保持平衡?
答:可以方便用刻度尺来直接测出实验中杠杆的力臂大小。
实验活动探究杠杆的平衡条件

人教版初中物理八年级下册第十二章 简单机械 第1节 杠杆
感谢您的聆听! 欢迎各位领导及同仁
提出宝贵的指导意见!
实验活动 ————探究杠杆的平衡条件
活动一、探究杠杆的平衡条件:
★杠杆平衡:杠杆在动力和阻力的作用下 静止时,我们就说杠杆平衡。
★调节平衡螺母,使 杠杆在水平位置平衡,
是为了便于在杠杆上 直接读出力臂的长度。
l1
l2
杠杆的平衡条件:动力×动力臂=阻力×阻力臂 F1 l1 F2 l2
活动二、
一天,猴子和兔子得到了一根胡萝卜,想要将它 平均分成两段,可它们两个谁都没有想出好的办法。 于是,就去求助森林法官黑猫警长。黑猫警长思考了 一会儿,说:把胡萝卜用细棉线悬吊起来,调整至水 平平衡,沿细棉线悬吊位置,用刀将胡萝卜切成两段, 这样分成的两段就一样重了嘛!
这样分 公平吗?
这样分 合理吗?
l1
l2
根据杠杆的平衡条件: F1l1=F2l2 ∵ l1<l2
∴ F1>F2
又∵ F1=GA,F2=GB
∴力×阻力臂 F1 l1 F2 l2
人教版初中物理八年级下册第十二章 简单机械 第1节 杠杆
相信同学们通过本节实验活动, 一定能平衡自己的理想与行动!
杠杆平衡条件实验报告
杠杆平衡条件实验报告
实验目的:
通过实验,验证杠杆平衡条件,并掌握杠杆平衡条件的实验方法。
实验仪器和材料:
1. 杠杆平衡条件实验仪。
2. 不同质量的砝码。
3. 支撑架。
4. 实验台。
5. 量具。
实验原理:
杠杆平衡条件是指在杠杆平衡时,两边所受的力矩相等。
即F1 × l1 = F2 × l2。
在实验中,通过改变不同的质量砝码,使得杠杆平衡,从而验证杠杆平衡条件。
实验步骤:
1. 将支撑架固定在实验台上,并安装好杠杆平衡条件实验仪。
2. 调整杠杆平衡条件实验仪,使得杠杆处于平衡状态。
3. 在杠杆的一端挂上一个质量砝码,观察杠杆是否失去平衡。
4. 根据失去平衡的情况,调整砝码的质量和位置,使得杠杆重新平衡。
5. 测量不同位置的砝码的质量和距离,记录数据。
实验结果:
通过实验,我们验证了杠杆平衡条件,并且得到了一组数据。
根据实验数据,我们可以计算出不同位置的力矩,并验证杠杆平衡条件。
实验结论:
通过实验,我们掌握了杠杆平衡条件的实验方法,并验证了杠
杆平衡条件。
实验结果与理论分析相符合,实验达到了预期的目的。
存在的问题和改进方向:
在实验中,我们发现在调整砝码位置时,需要耐心和细心,以
确保杠杆能够平衡。
在以后的实验中,我们需要更加仔细地调整砝
码的位置,以获得更加准确的实验数据。
自查人,XXX 日期,XXXX年XX月XX日。
实验15 探究杠杆的平衡条件实验(解析版)
实验十五、探究杠杆的平衡条件【探究目的】探究杠杆的平衡条件【实验器材】杠杆、钩码盒一套、弹簧测力计、细线、刻度尺;【探究假设】杠杆的平衡可能与“动力和力臂的乘积”、“阻力和阻力臂的乘积”有关。
【实验步骤】①调节杠杆两端的平衡螺母,使横梁平衡。
②在杠杆的左右两端分别用细线依次悬挂个数不同钩码【每一个钩50g=0.05kg,重为:G=mg=0.05kg×10N/kg=0.5N】,(假设左端砝码的重力产生的拉力为阻力F2,右端钩码的重力产生的拉力为动力F1,)先固定F1大小和动力臂l1的大小,再选择适当的阻力F2,然后移动阻力作用点,改变阻力臂l 2大小,直至杠杆平衡,分别记录下此时动力F1、动力臂l1、阻力F2和阻力臂l 2的数值,并将实验数据记录在表格中。
③固定F1大小和动力臂l1的大小,改变阻力F2的大小,在移动阻力作用点,改变阻力臂l 2大小,直至杠杆平衡,记录下此时的阻力F2和阻力臂l 2的数值,并填入到实验记录表格中。
④改变动力F1的大小,保持动力臂l1的大小以及阻力F2大小不变,再改变阻力F2作用点,直至杠杆重新平衡,记录下此时动力F1大小和阻力臂l 2的大小,并填入到实验数据记录表。
⑤整理实验器材。
【数据记录】:实验数据记录表如下:动力F1(N)动力臂l1(cm) 动力×动力臂(NM阻力F2(N)阻力臂l2(cm)阻力×阻力臂(N•m)步骤2步骤3实验剖析步骤4【实验结论】动力×动力臂=阻力×阻力臂公式表示:F1L1=F2L2。
思考:在上述探究实验中,为什么每次都要使杠杆在水平位置保持平衡?答:可以方便用刻度尺来直接测出实验中杠杆的力臂大小【考点方向】:1、实验前杠杆的调节:左高右调,右高左调。
平衡后实验过程中不能在调节平衡螺母。
2、实验过程中将杠杆调成水平平衡的目的是:便于直接测量(读出)力臂。
3、选择杠杆终点作为支点的好处:消除杠杆自身重力对实验的影响。
实验15 探究杠杆平衡条件的实验(解析版)
实验十五探究杠杆平衡条件的实验【探究目的】:杠杆的平衡条件【实验器材】:杠杆、钩码盒一套、弹簧测力计、细线、刻度尺;【探究假设】:杠杆的平衡可能与“动力和力臂的乘积”、“阻力和阻力臂的乘积”有关。
【实验步骤】:①调节杠杆两端的平衡螺母,使横梁平衡。
②在杠杆的左右两端分别用细线依次悬挂个数不同钩码【每一个钩50g=0.05kg,重为:G=mg=0.05kg×10N/kg=0.5N】,(假设左端砝码的重力产生的拉力为阻力F2,右端钩码的重力产生的拉力为动力F1,)先固定F1大小和动力臂l1的大小,再选择适当的阻力F2,然后移动阻力作用点,改变阻力臂l 2大小,直至杠杆平衡,分别记录下此时动力F1、动力臂l1、阻力F2和阻力臂l 2的数值,并将实验数据记录在表格中。
③固定F1大小和动力臂l1的大小,改变阻力F2的大小,在移动阻力作用点,改变阻力臂l 2大小,直至杠杆平衡,记录下此时的阻力F2和阻力臂l 2的数值,并填入到实验记录表格中。
④改变动力F1的大小,保持动力臂l1的大小以及阻力F2大小不变,再改变阻力F2作用点,直至杠杆重新平衡,记录下此时动力F1大小和阻力臂l 2的大小,并填入到实验数据记录表。
⑤整理实验器材。
【数据记录】:实验数据记录表如下:动力F1(N)动力臂l1(cm) 动力×动力臂(NM阻力F2(N)阻力臂l2(cm)阻力×阻力臂(N•m)步骤2步骤3步骤4【实验结论】:根据实验记录数据,探究结论是:动力×动力臂=阻力×阻力臂公式表示:F1L1=F2L2思考:在上述探究实验中,为什么每次都要使杠杆在水平位置保持平衡?答:可以方便用刻度尺来直接测出实验中杠杆的力臂大小【考点方向】:1、实验前杠杆的调节:左高右调,右高左调。
平衡后实验过程中不能在调节平衡螺母。
2、将杠杆调成水平平衡的目的是:便于测量力臂3、选择杠杆终点作为支点的好处:消除杠杆自身重力对实验的影响。
杠杆平衡条件实验报告

杠杆平衡条件实验报告
实验目的:
本实验旨在通过悬挂不同重量的物体在杠杆两端,观察杠杆平衡条件的变化,验证杠杆平衡条件的原理。
实验设备和材料:
1. 杠杆。
2. 不同重量的物体。
3. 支撑架。
4. 测量尺。
5. 夹子。
实验步骤:
1. 将杠杆放置在支撑架上,保证杠杆平衡。
2. 在杠杆的一端夹上一个重物,记录下杠杆平衡的位置。
3. 在杠杆的另一端夹上不同重量的物体,再次记录下杠杆平衡的位置。
4. 重复上述步骤,使用不同重量的物体进行实验。
实验结果:
通过实验观察和记录,我们得出了以下结论:
1. 当杠杆两端的重量相等时,杠杆保持平衡。
2. 当杠杆一端的重量增加时,需要在另一端增加相应的重量才能保持平衡。
3. 杠杆平衡的位置随着重量的变化而变化,符合杠杆平衡条件的原理。
实验结论:
本实验通过观察和记录杠杆平衡条件的变化,验证了杠杆平衡条件的原理。
实验结果表明,杠杆平衡条件与杠杆两端的重量成正比,符合理论预期。
同时,实验结果也验证了杠杆平衡条件的基本原理,为进一步深入理解杠杆平衡条件提供了实验基础。
存在问题及改进措施:
在实验过程中,由于杠杆的长度和重量的不确定性,可能会对实验结果产生一定的影响。
为了减小误差,可以使用更精密的测量工具和更稳固的支撑架,以提高实验的准确性和可靠性。
实验人员签名,__________ 日期,__________。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
专题13: 杠杆平衡条件的实验探究
1、(05武汉)在“研究杠杆平衡条件”实验中:
(1)实验前出现图甲所示情况,为了使杠杆在水平位置平衡,应将杠杆左端的螺母向 调
(填“左”或“右”)
啊 A
(2)实验过程中出现图乙所示情况,为了使杠杆在水平位置平衡,这时应将右边的钩码向 (填“左”或“右”)移动 格。
(3)图乙中杠杆水平平衡后,在杠杆左右两边钩码下同时加一个相同的钩码,这时杠杆将 。
(填“保持水平平衡”、“顺时针转动”或“逆时针转动”)
(4)如图丙所示的案秤是个不等臂杠杆,请你根据杠杆的平衡条件,说明用几个不重的砝码
就能平衡盘中重得多的货物的道理 。
2、(05贵阳·课改区)甲乙两个实验小组在探究“杠杆的平衡条件”时,分别得到下面两组数据
和结论。
他们在交流时,甲组发现了自己实验结论的错误和产生错误的原因。
你认为甲组产生错误的
甲组产生错误的原因: 。
3、(06沈阳课改)小森在“探究杠杆平衡条件”的实验中: (1)把杠杆挂在支架上,观察到枉杆左端下沉,当他 去调节螺母时,发现两侧螺母已丢失,聪明的小森 在______〔“左,或“右”〕侧末端缠些透明胶就使 杠杆在水平位置平衡了。
(2)某次测量中,如图16所示的杠杆已处于平衡状
甲 乙 秤盘
调零
螺丝
支点 游码 槽码 秤杆
态。
若小森在两边钩码下方各拿走两个钩码,杠杆
______(“左”或“右’)端将下沉。
为使杠杆恢复水平平衡,小森应将左侧剩余的两个钩码移 至____________处。
4、(2007·兰州市)(6分)在验证杠杆平衡条件时,某实验小组得到了如图9-15所示的杠杆平
衡状态。
已知每个钩码的质量均相等:
(1)若钩码所挂位置不动,将左边的钩码去掉一个,为使杠杆仍然保持平衡,右边的钩码该拿掉 个;
(2)由此,总结出杠杆的平衡条件为: 。
5、(08江苏徐州)图8是小华同学探究杠杆平衡条件的实验装置。
(1)请你在图8中画出钩码受到重力G 的示意图和此时杠杆受到动力F 1的力臂l 1; (2)现在小华同学想使杠杆在水平位置平衡,以便测量力臂,她可以采取的做法是: (写出一条即可); (3)右表是小华得到的一组实验数据,由此她得出
“动力+动力臂=阻力+阻力臂”的结论。
你认为她的 实验结论是否正确?如果不正确,造成错误的原因是什么? 。
6、(08北京)实验台上有如下实验器材:一个带支架的杠杆、一个量程为0-5N 的弹簧测力计、六个质量均为100g 的钩码和两段细绳。
请利用上述实验器材设计一个实验。
证明“在杠杆平衡时,如果动力臂和阻力臂保持不变,则动力跟阻力成正比”。
(1)在你所设计的实验中,如果用点A 表示钩码作用在杠杆上的位置,用点B 表示弹簧测力计作用在杠杆上的位置,请在图中的杠杆上标出A 点和B 点。
(2)请写出主要实验步骤。
7、(08年大连市)(5分)在探究“杠杆的平衡条件”实验中,所用的实验器材有杠杆、支架、刻度尺、细线、质量相同的钩码若干。
(1)将杠杆装在支架上,发现杠杆右端下沉,如果将杠杆右侧的平衡螺母向左调到头了,杠杆右端仍下沉,此时应将杠杆左侧的平衡螺母向_________调,直到杠杆在水平位置平衡为止。
(2)某同学进行正确的实验操作后,得到的数据为F 1=6N 、l 1=20cm 、F 2=4N 和l 2=30cm 。
该同学根据这些数据能否得出探究结论?_________。
理由是:
___________________________________________________________ __________________________________________________________。
图9-15
(3)使杠杆在倾斜一定角度的位置做实验,也能得出杠杆平衡条件。
这种实验方案与杠杆在水平位置做实验的方案相比较,你认为哪种实验方案好并说明理由:
____________________________________________________。
(4)如图15所示,杠杆在水平位置平衡。
如果在两侧钩码下再各挂一个相同的钩码,则杠杆
_________端将下沉。
8、(08广西南宁)(4分)在探究“杠杆的平衡条件”实验中:
(1)首先,调节杠杆两端的,使杠杆两端在不挂钩
码时,保持水平并静止,达到状态。
(2)如图13所示,杠杆每格长度相同,杠杆的a处已挂着2个0.5N
的钩码,要使杠杆平衡,则应在杠杆的处,挂上个
0.5N的钩码。
9、(08青海)在探究“杠杆的平衡条件”的实验中,采用如图15
所示的装置。
(1)实验时,应先调节平衡螺母,使杠杆在_____________位置平衡。
(2)若不计杠杆质量和摩擦且杠杆刻度均匀,每个钩码质量都相同,
在C点挂2个钩码时,在D点应挂_________个钩码,杠杆才能恢复平
衡。
(3)若钩码所挂位置不动,将左边的钩码拿掉一个,要使杠杆仍保持
平衡状态,应将右边的钩码拿掉个。
(4)由此,总结出杠杆的平衡条件为:
__________________________。
10、(08山东枣庄)在探究“杠杆的平衡条件”的实验中,某同学记录了三次实验数据如下表:
(1)这三次实验数据中有一次是错误的,错误数据的实验次数是,由正确实验结果可得杠杆的平衡条件是。
(2).如下图所示,当在A处挂了三个
钩码时,要使杠杆平衡,应在C处挂个钩
码。
(每个钩码的质量相等)。
(3)若某次实验中用弹簧测力计竖直向
上拉杠杆一端的A点,如图所示,杠杆平衡
时弹簧测力计的示数为F a,若在A点斜向上
拉,杠杆要求在水平位置再次平衡时,弹簧
测力计的示数为F b,则F a F b (填“大于、
小于、等于”)。
参考答案:
1)(1)右;(2)右,2;(3)顺时针转动;(4)大于;(5)如图19丙所示,设被称量货物的重力为G1,其力臂为L1,砝码的重力为G2,其力臂为L2,由杠杆平衡条件G1L1=G2L2L1<L2G1>G2 2)甲组的错误:
(1)不同单位的物理量不能相加。
(2)这四个物理量中的三个,它们的数据都应任意设定,不能有任何人为设置的规律。
(3)没有进行多次测量并从中找到普遍规律。
3)(1)右(2)左 D
4)(1)2个(2)动力×动力臂=阻力×阻力臂
5)(1)图略。
重力示意图(1分);动力臂(1分)
(2)增大拉力(或弹簧测力计向左移动、钩码向左移动)(2分)
(3)不正确(1分);因为只测量了一组数据,具有偶然性(不能得出普遍规律);不同的物理量不能相加 (1分)
6)(1)见右图
(2)①用细绳做成两个绳套,分别拴牢在杠杆的A和B点处,调
节杠杆使其在水平位置平衡。
将弹簧测力计的指针调节到零刻度线
位置。
②在A点处依次挂1个、2个、3个、4个、5个、6个钩码,
在B点处依次竖直向上拉弹簧测力计,分别使杠杆在水平位置平
衡。
将每次实验操作中挂在杠杆上的钩码的总质量和相应的弹簧测
力计示数记录在表格中。
7)(1)左(1分)
(2)不能得出探究结论(1分);
因为一次实验获得的数据具有偶然性,不能反映普遍规律(1分)
(3)杠杆在水平位置的实验方案好,便于测量力臂(1分)
(4)右(1分)
8)(1)平衡螺姆(1分),平衡(1分) (2)b(或c或e)(1分),4(或2或1)(1分)
9)(1)水平(2)4 (3)2 (4)F1L1=F2L2或动力×动力臂=阻力×阻力臂
10)(1)2 动力×动力臂=阻力×阻力臂(2)6 (3)小于。