数字信号处理第二章
合集下载
数字信号处理第2章
Z变换与拉氏变换的关系:
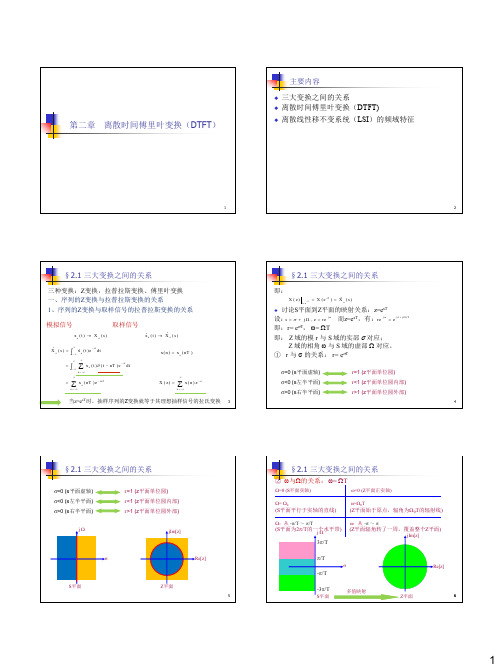
这一关系实际上是通过 到了Z平面。
若将Z平面用极坐标表示
标表示
,代入
将S平面的函数映射
,S平面用直角坐 ,得:
上述关系表明: z 的模 r 仅与 s 的实部 相对应, z 的幅角 则仅与 s 的虚部 对应。
映射关系:
Z变换与拉氏变换的关系
0 0,2 (S平面实轴映射到Z平面的正实轴)
解:
,求它的傅立叶变换。
其幅度谱和相位谱分别为:
典型例题
❖ 例2 已知序列的傅立叶变换如下,求它的反变换。
解:
显然序列 h(n)不是绝对可和的,而是平方可和 的 ,但其依然存在傅立叶变换。 Parseval定理
典型例题
❖ 例3 证明复指数序列 x(n) e j0n 的傅立叶变换为:
证:根据序列的傅立叶反变换定义,利用冲击函 数 的性质,有:
即序列绝对可和
某的有 立些序些叶既列序变不,列换满若虽依足引然然绝入不存对频满在可 域足。和的以见的冲上后条击条例件函件。也数,不但满满,足足其平平傅方方立可可叶和和变条,换件其傅
也存在。如
、某些周期序列,见后例。
序列傅立叶变换的定义
5.常用序列的傅立叶变换
序列
(n)
傅立叶变换
1
1
典型例题
❖ 例1 已知
A形k(式k=求0,X取1(…:z),N)B,(此z) A( z )
时
为了方bi 便z i通常利用
i0
N
1 ai z i
X(z)/z的
i 1
若序列为因果序列,且N≥M,当X(z)的N个极点都是单
极点时,可以展开成以下的部分分式的形式:
则其逆Z变换为:
数字信号处理第二章

回到本节
返回
2.2.4 时域离散信号傅里叶变换的性质
时域离散信号傅里叶变换有很多重要的性质,其中一些 性质和模拟信号的傅里叶变换性质类似,参考教材中表 。 本小节重点介绍: 傅里叶变换的周期性 频域卷积定理 傅里叶变换的对称性
回到本节
返回
此定理亦称为调制定理
傅里叶变换的周期性:
1
频域卷积定理:
2
回到本节
返回
傅里叶变换的对称性: 一般不做特殊说明,序列x(n)就是复序列。用下标r表 示它的实部,用下标i表示它的虚部: 复序列中有共轭对称序列和反共轭对称序列,分别用下 标e和o表示 共轭对称序列满足 复反共轭对称序列满足
返回
回到本节
一般序列傅里叶变换的对称性质ຫໍສະໝຸດ 一般序列可以表示为返回
回到本节
左序列Z变换的收敛域
01
回到本节
返回
上式右边:
第一项的收敛域为0 ≤|z|<Rx+, 第二项的收敛域为0<|z|≤∞, 将两个收敛域相与,得到左序列的收敛域为0<|z|< Rx+ 。 如果n1<0,则收敛域为0 ≤|z|<Rx+。
回到本节
返回
双边序列Z变换的收敛域 双边序列就是在-∞~+∞之间均有非零值的序列。 双边序列的Z变换
回到本节
返回
例2.4: ,求Z反变换
回到本节
返回
Z变换和傅里叶变换之间的关系 Z变换 令上式中的 ,得到 式中,r是z的模,ω是它的相位,也就是数字频率。这 样, 就是序列x(n)乘以实指数序列r-n后的傅里叶 变换。
回到本节
返回
如果r= =1,Z变换就变成了傅里叶变换了,即 r=1指的是Z平面上的单位圆,因此傅里叶变换就 是Z平面单位圆上的Z变换。
数字信号处理第二章

0 1 2 N − 1T
Ω0
kΩ 0
此时,时域是连续变量的周期信号,而频域是离散等间 隔的。频域谱线的间隔与时域重复的周期之间的关系:
2π Ω0 = T0
3
0
n
0 1 2 N − 1N
n
时域周期化,使对应着频域离散化。频域离散的间隔:
2π N
6
1
第2章
离散傅里叶变换(DFT)
1、时域周期化→频域离散化
~ x(t)
& (kΩ ) = 1 X 0 T0
T0 2
0 −2
x (t )e ∫~
T
− jkΩ0t
dt
− T0
T0
2T0
t
& ( jΩ) X
~ x (t ) =
k = −∞
& ( kΩ ∑X
∞
0
) e jk Ω 0 t
• 一、时域频域离散与离散傅里叶级数(DFS) • 1、时域周期化→频域离散化: • 离散时间傅里叶变换是连续变量ω的函数,不方便与 计算机处理,为此将它离散化,也变成离散信号处理。 为此,将离散时间信号周期延展。 x ( n) ⎯ ⎯→ ~ x (n) ~ x(n) x(n)
n=0
N −1
2π − j kn N
0 1 2 N − 1N
n
1 ~ x ( n) = N
N −1 k =0
∑ X ( k )e
~
j
2π kn N
−N
⎛ j 2πk ⎞ ~ X⎜e N ⎟ = X (k) ⎜ ⎟ 1 ⎝ ⎠
Ts
~ x ( n) = x (( n)) N
0 1 2
N −1
N
n
0 1 2
Ω0
kΩ 0
此时,时域是连续变量的周期信号,而频域是离散等间 隔的。频域谱线的间隔与时域重复的周期之间的关系:
2π Ω0 = T0
3
0
n
0 1 2 N − 1N
n
时域周期化,使对应着频域离散化。频域离散的间隔:
2π N
6
1
第2章
离散傅里叶变换(DFT)
1、时域周期化→频域离散化
~ x(t)
& (kΩ ) = 1 X 0 T0
T0 2
0 −2
x (t )e ∫~
T
− jkΩ0t
dt
− T0
T0
2T0
t
& ( jΩ) X
~ x (t ) =
k = −∞
& ( kΩ ∑X
∞
0
) e jk Ω 0 t
• 一、时域频域离散与离散傅里叶级数(DFS) • 1、时域周期化→频域离散化: • 离散时间傅里叶变换是连续变量ω的函数,不方便与 计算机处理,为此将它离散化,也变成离散信号处理。 为此,将离散时间信号周期延展。 x ( n) ⎯ ⎯→ ~ x (n) ~ x(n) x(n)
n=0
N −1
2π − j kn N
0 1 2 N − 1N
n
1 ~ x ( n) = N
N −1 k =0
∑ X ( k )e
~
j
2π kn N
−N
⎛ j 2πk ⎞ ~ X⎜e N ⎟ = X (k) ⎜ ⎟ 1 ⎝ ⎠
Ts
~ x ( n) = x (( n)) N
0 1 2
N −1
N
n
0 1 2
数字信号处理 第2章讲解
36
5、共轭序列
6、翻褶序列
Z x(n) X 1 ,
z
1
1
z
Rx
Rx
37
7、初值定理 (因果序列初值)
对于因果序列,有:
8、终值定理 (因果序列终值)
对于因果序列,极点处于单 位圆 z 1 以内(单位圆上最多 在 z 1处有一阶极点),则
38
9、有限项累加特性
63
任意序列的傅立叶变换是一序列,也有类 似的分解方法:
傅立叶变换: 共轭对称序列: 共轭反对称序列:
X (e j ) Xe(e j ) Xo(e j )
X
e
(e
j
)
1 2
[
X
(e
j
)
X
(e
j
)]
X
o
(e
j
)
1 2
[
X
(e
j
)
X
(e
j
)]
64
共轭对称(偶)对应实数(部), 共轭反对称(奇)对应虚数(部)
系统的频率响应
2
一、 Z变换的定义及收敛域
1、Z变换的定义
幂级数
记为 Z x(n) X (z)
3
2、Z变换的收敛域
Z变换所对应的幂级数收敛时, Z变换才有意义。
幂级数收敛的充分必要条件 是满足绝对可和,即:
4
1). 有限长序列
5
图1.有限长序列及其收敛域 (
除外)
6
2). 右边序列
理想冲激抽样的拉普拉斯变换为:
抽样所得序列的z变换为:
X (z) x(n)zn X (z) zesT X (esT ) X a (s)
5、共轭序列
6、翻褶序列
Z x(n) X 1 ,
z
1
1
z
Rx
Rx
37
7、初值定理 (因果序列初值)
对于因果序列,有:
8、终值定理 (因果序列终值)
对于因果序列,极点处于单 位圆 z 1 以内(单位圆上最多 在 z 1处有一阶极点),则
38
9、有限项累加特性
63
任意序列的傅立叶变换是一序列,也有类 似的分解方法:
傅立叶变换: 共轭对称序列: 共轭反对称序列:
X (e j ) Xe(e j ) Xo(e j )
X
e
(e
j
)
1 2
[
X
(e
j
)
X
(e
j
)]
X
o
(e
j
)
1 2
[
X
(e
j
)
X
(e
j
)]
64
共轭对称(偶)对应实数(部), 共轭反对称(奇)对应虚数(部)
系统的频率响应
2
一、 Z变换的定义及收敛域
1、Z变换的定义
幂级数
记为 Z x(n) X (z)
3
2、Z变换的收敛域
Z变换所对应的幂级数收敛时, Z变换才有意义。
幂级数收敛的充分必要条件 是满足绝对可和,即:
4
1). 有限长序列
5
图1.有限长序列及其收敛域 (
除外)
6
2). 右边序列
理想冲激抽样的拉普拉斯变换为:
抽样所得序列的z变换为:
X (z) x(n)zn X (z) zesT X (esT ) X a (s)
数字信号处理____第二章 离散时间傅里叶变换(DTFT)
x a (t )e
st
e
jk
2 T
t
dt
用傅里叶级数表示
即:Z变换可看成是x(n)乘以指数序列r-n后的傅里叶变换。 2、单位圆上的Z变换就是序列的傅里叶变换
X a ( s jk s )
k
周期延拓
z re
j
r 1 z e
j
X (z)
ze
sT
X (e
M N
y (n)
m 0
bm x (n m )
k 1
ak y (n k )
23
24
4
§2.3 离散线性移不变(LSI)系统的频域特征
2、变换域中的表述 用系统函数H(z)来表征(指明收敛域)
§2.3 离散线性移不变(LSI)系统的频域特征
用频率响应来H(ejω)表征
H (e
x ( n )e
j ( n )
]
X (e
*
j
)
满足共轭反对称性
X o (e
j
) X o (e
)
19
20
§2.2 离散时间傅里叶变换(DTFT)
4、信号的实部和虚部的傅里叶变换
x ( n ) Re[ x ( n )] j Im[ x ( n )]
§2.2 离散时间傅里叶变换(DTFT)
j
)] X e ( e
j
)
Im[ X ( e
j
)] Im[ X ( e
j
奇函数
j Im[ x ( n )]
1 2
[ x ( n ) x ( n )] 1 2
数字信号处理,第二章 Z变换讲解
二、右边序列
例3:求序列 x(n) u(n)的Z变换及收敛域。
Z[x(n)] u(n)zn zn
n
n0
1 1 1 z z2
1 1 z 1
z z 1
Z[u(n)]的极点为1,零点为0 收敛域为|z|>1
零极相消
例:
Z[u(n) u(n 1)]
Z[u(n)] Z[u(n 1)]
s1in2zz1
1 sin(0 cos0
z 2
)
§2.3 z变换性质1
一、线性:
Z[a1x1(n)+a2x2(n)]=a1Z[x1(n)]+a2Z[x2(n)]
二、时移:
Z[x(n)]=X(z) Z[x(n-m)]=z-m·X(z)
意义:z-1:单位延迟器
z变换性质2
三、时域卷积:
即: x(n)z n M n
一、有限长序列
例1:求序列 x(n) RN (n) 的Z变换及收敛域。
Z[RN (n)]
RN (n)zn
n
N 1
z n
n0
1 zN 1 z1
收敛域为: 0 z ,
例2:求序列 x(n) (n)的Z变换及收敛域。
解:
Z[ (n)] (n)zn z0 1
z z1 z z 1 1
z 1
z 1 z 1
零、极点均为z=1,称为零极点相消。收敛域为整个z平面。
另:
u(n) u(n 1) (n), Z[ (n)] 1
例4:求序列 x(n) anu(n)的Z变换及收敛域。
解: X (z) anu(n)z n a n z n (az 1 )n
例2-4-2:
X
(
z)
第二章 时域离散信号和系统(数字信号处理)

第二章 时域离散信号和系统
6. 复指数序列
x(n)=e(σ+jω0)n 式中ω0为数字域频率,设σ=0,用极坐标和实部虚 部表示如下式: x(n)=e jω0n
x(n)=cos(ω0n)+jsin(ω0n)
由于n取整数,下面等式成立: e j(ω0+2πM)n= e jω0n, M=0,±1,±2…
第二章 时域离散信号和系统
图1.2.5 正弦序列
第二章 时域离散信号和系统
则要求N=(2π/ω0)k,式中k与N均取整数,且k的取
值要保证N是最小的正整数,满足这些条件,正弦序列 才是以N为周期的周期序列。
正弦序列有以下三种情况:
(1)当2π/ ω0为整数时,k=1,正弦序列是以2π/ ω0 为周期的周期序列。例如sin(π/8)n, ω0 =π/8,2π/ ω0 =16,该正弦序列周期为16。
例 设x(n)=R4(n),h(n)=R4(n),求y(n)=x(n)*h(n)。
解 按照公式,
y (n )
m
R ( m) R ( n m)
4 4
上式中矩形序列长度为4,求解上式主要是根据矩
形序列的非零值区间确定求和的上、下限,R4(m)的非
令n-k=m,代入上式得到
u( n )
n
( m)
n
第二章 时域离散信号和系统
u(n) 1 „ n 0 1 2 3
单位阶跃序列
第二章 时域离散信号和系统
3. 矩形序列RN(n) 1, RN(n)= 0, 0≤n≤N-1 其它n
上式中N称为矩形序列的长度。当N=4时,R4(n)的
第二章 时域离散信号和系统
第2章 时域离散信号和系统
数字信号处理 第二章 DFT

~ N=16:x (4) x((4))16 x((12 16))16 x(12)
例2:
x (n ) x (n ) 0
~ 1 X (k ) k 0 N ~ X (r )
e
j
15
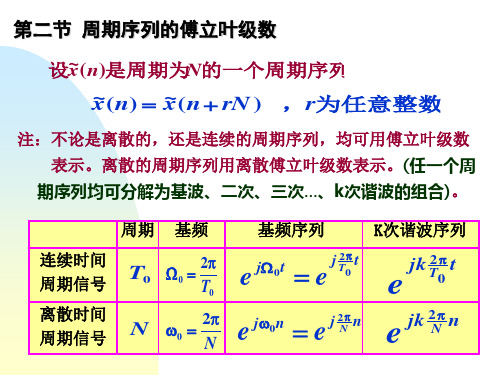
周期序列的傅里叶级数表示:
正变换:
2 N 1 N 1 j nk ~ ~(n) ~(n)e N ~(n)W nk X (k ) DFS x x x N n 0 n 0
反变换:
~ ~(n) IDFS X (k ) 1 x N
j
2 kN N
k mN , m为整数 其他k
W
n 0
N 1
( m k ) n N
1W 1W
( k m ) N N ( k m ) N
1 e
j
1 e
N m k rN 0 mk
此外,复指数序列还有如下性质:
0 WN 1, W N 2 N r 1 1, WN WN r
ek (n)
ek (n) 是以N为周期的周期序列,所以基序
列 {e }(k=0,…,N-1) 只有N个是独立 的,可以用这N个基序列将 ~ ( n) 展开。 x
j 2 nk N
12
复指数序列 ek (n) e
周期性:
j
2 nk N
W
nk N
的性质:
无论对k还是n,复指数序列都具备周期性。
时间函数 连续和非周期 连续和周期(T0) 离散(Ts)和非周期 离散(Ts)和周期(T0) 非周期和连续 非周期和离散(Ω 0=2π /T0) 周期(Ω s=2π /Ts)和连续 周期(Ω s=2π /Ts)和离散(Ω 0=2π /T0) 频率函数
数字信号处理-第2章-精品文档精选文档PPT课件

第2章. 连续时间信号的离散处理
2.1、数字信号处理系统的基本组成
•大多数数字信号处理的应用中,信号为来自不同模拟信号源,这些模拟 信号(电压或电流)通常为连续时间信号。
•应用数字信号处理(DSP)主要有三个原因: 1)滤波:滤除信号中来自周围环境的干扰或噪声; 2)检测:检测淹没在噪声中的特定信号(如雷达或声纳系统中),当检测 到的信号超过给定的阈值则认为目标信号存在,反之认为不存在; 3)压缩:当信号转换到另外一个域后,在变换域上更容易分辨信息的重 要程度,对重要部分分配多的比特数,次要部分分配尽可能少的比特 数,达到压缩的目的(如DCT算法)。
的是离散时间信号。将连续时间信号转换成离散时间信号的过程叫抽样。
抽样可由称为A/D变换器的器件完成:
量化结果
声卡
5
模拟输入 xa (t)
Ts
抽样器
抽样输出
xˆa (t)
xˆa(t) xa(t)•P (t)
xa(t)(t nTs)
n
xˆa (t)
周期性抽样函数 P (t )
xˆa (t)
Ts
P(t) (tnTs)
是否可以根据抽样后的离散时间序列恢复原始信号? •奈奎斯特抽样频率:能够再恢复出原始信号的最低抽样频率(使 抽样后的信号频谱不发生混叠的最低抽样频率,即信号最高频率的 二倍)
0 s/2 s2 0
•满足奈奎斯特抽样频率的抽样信号可由理想低通滤波器恢复出原 始信号。此后将推导这个过程。
xˆa(t) G (j )/g (t( ) 低 通 y滤 (t) 波 xa) (t)
X a ( j)
xa
(t )e
jt dt
[xa
(t )
•
P
(t )]e
2.1、数字信号处理系统的基本组成
•大多数数字信号处理的应用中,信号为来自不同模拟信号源,这些模拟 信号(电压或电流)通常为连续时间信号。
•应用数字信号处理(DSP)主要有三个原因: 1)滤波:滤除信号中来自周围环境的干扰或噪声; 2)检测:检测淹没在噪声中的特定信号(如雷达或声纳系统中),当检测 到的信号超过给定的阈值则认为目标信号存在,反之认为不存在; 3)压缩:当信号转换到另外一个域后,在变换域上更容易分辨信息的重 要程度,对重要部分分配多的比特数,次要部分分配尽可能少的比特 数,达到压缩的目的(如DCT算法)。
的是离散时间信号。将连续时间信号转换成离散时间信号的过程叫抽样。
抽样可由称为A/D变换器的器件完成:
量化结果
声卡
5
模拟输入 xa (t)
Ts
抽样器
抽样输出
xˆa (t)
xˆa(t) xa(t)•P (t)
xa(t)(t nTs)
n
xˆa (t)
周期性抽样函数 P (t )
xˆa (t)
Ts
P(t) (tnTs)
是否可以根据抽样后的离散时间序列恢复原始信号? •奈奎斯特抽样频率:能够再恢复出原始信号的最低抽样频率(使 抽样后的信号频谱不发生混叠的最低抽样频率,即信号最高频率的 二倍)
0 s/2 s2 0
•满足奈奎斯特抽样频率的抽样信号可由理想低通滤波器恢复出原 始信号。此后将推导这个过程。
xˆa(t) G (j )/g (t( ) 低 通 y滤 (t) 波 xa) (t)
X a ( j)
xa
(t )e
jt dt
[xa
(t )
•
P
(t )]e
《数字信号处理》第二章 离散信号和抽样定理
性延拓,因而采样信号xs(t)就包含了的原信号x(t)全部
信息。
重要结论
第三节 抽样定理
*带限信号抽样定理:
要想连续信号抽样后能够不失真的还原 出原信号,则抽样频率必须大于或等于两 倍原信号频谱的最高频率(2fm≤ fs),这就是 奈奎斯特抽样定理。
第三节 抽样定理
二、如何从抽样信号恢复出带限信号x(t)
n
其中
1 g (t)
0
t
2
t
2
Ts
第二节 连续信号的离散化
xa (t)
抽样器
(电子开关) P(t)
T
xa (t)
xˆs (t)
fs
1 T
xˆs (t)
第二节 连续信号的离散化
理想抽样:当τ 趋于零的极限情况时,抽样脉冲
方波p(t)变成了冲激函数序列δT(t),这些冲击函数 的强度准确地为采样瞬间的xa(t)幅值,这样的抽 样称为理想抽样。
余弦与正弦序列示意图如下:
第一节 离散时间信号
5、 用单位脉冲序列表示任意序列
任意序列x(n)都可用单位脉冲序列δ(n)表示成 加权和的形式,即
x(n) x(m) (n m) m
如:
a n x(n)
可表示为 0
10 n 10 其他
10
x(n) am (n m)
样品集合可以是本来就存在的,也可以是由模拟 信号通过采样得来的或者是用计算机产生的。
第一节 离散时间信号
离散时间信号的时域表示 1) 表示离散时间信号可采用枚举的方式。例如
{x(n)}={…,-1.5,-8.7,2.53,0.0,6,7.2, …}
信息。
重要结论
第三节 抽样定理
*带限信号抽样定理:
要想连续信号抽样后能够不失真的还原 出原信号,则抽样频率必须大于或等于两 倍原信号频谱的最高频率(2fm≤ fs),这就是 奈奎斯特抽样定理。
第三节 抽样定理
二、如何从抽样信号恢复出带限信号x(t)
n
其中
1 g (t)
0
t
2
t
2
Ts
第二节 连续信号的离散化
xa (t)
抽样器
(电子开关) P(t)
T
xa (t)
xˆs (t)
fs
1 T
xˆs (t)
第二节 连续信号的离散化
理想抽样:当τ 趋于零的极限情况时,抽样脉冲
方波p(t)变成了冲激函数序列δT(t),这些冲击函数 的强度准确地为采样瞬间的xa(t)幅值,这样的抽 样称为理想抽样。
余弦与正弦序列示意图如下:
第一节 离散时间信号
5、 用单位脉冲序列表示任意序列
任意序列x(n)都可用单位脉冲序列δ(n)表示成 加权和的形式,即
x(n) x(m) (n m) m
如:
a n x(n)
可表示为 0
10 n 10 其他
10
x(n) am (n m)
样品集合可以是本来就存在的,也可以是由模拟 信号通过采样得来的或者是用计算机产生的。
第一节 离散时间信号
离散时间信号的时域表示 1) 表示离散时间信号可采用枚举的方式。例如
{x(n)}={…,-1.5,-8.7,2.53,0.0,6,7.2, …}
数字信号处理-时域离散随机信号处理(丁玉美)第2章
rxx (0) rxx (0) Rxx r ( M 1) xx
第二章 维纳滤波和卡尔曼滤波 (2.2.22)式可以写成矩阵的形式, 即
Rxd Rxxh
对上式求逆,得到
h Rxx1Rxd
(2.2.23)
(2.2.24)
第二章 维纳滤波和卡尔曼滤波 上式表明已知期望信号与观测数据的互相关函数及观测 数据的自相关函数时,可以通过矩阵求逆运算, 得到维纳滤
E[| e(n) |2 ] E[| e(n) |2 ] j 0 a j b j
记
j=0, 1, 2, … (2.2.6)
j j a j b j
j=0, 1, 2, …
(2.2.7)
第二章 维纳滤波和卡尔曼滤波 则(2.2.6)式可以写为
j E[| e(n) |2 ] 0
j 0
(2.2.16)
假定滤波器工作于最佳状态,滤波器的输出yopt(n)与期望信号d(n) 的误差为eopt(n),把(2.2.15)式代入上式,得到
* E[ yopt (n)eopt (n)] 0
(2.2.17)
第二章 维纳滤波和卡尔曼滤波
d(n) eo pt(n)
yo pt(n)
图 2.2.1 期望信号、 估计值与误差信号的几何关系
方法求解,简单易行,具有一定的工程实用价值,并且物理概
念清楚,但不能实时处理;维纳滤波的最大缺点是仅适用于一 维平稳随机信号。这是由于采用频域设计法所造成的, 因此人 们逐渐转向在时域内直接设计最佳滤波器的方法。
第二章 维纳滤波和卡尔曼滤波
2.2 维纳滤波器的离散形式——时域解
2.2.1 维纳滤波器时域求解的方法 根据线性系统的基本理论,并考虑到系统的因果性,可以 得到滤波器的输出y(n),
数字信号处理——第2章 离散时间傅里叶变换与Z变换

• 总结:
①序列ZT的收敛域以极点为边界(包含0 和 ②收敛域内不含任何极点,可以包含0 ③相同的零极点可能对应不同的收敛域,即: 不同的序列可能有相同的ZT ④收敛域汇总:右外、左内、双环、有限长z平面
)
常见典型序列z变换
序列 Z变换 收敛域
z a
z b
注意:只有z变换和它的收敛域两者在一起才和序列相对应。 其它序列见P54: 表2-1 几种序列的z变换
2.3
z反变换
Z反变换: 从X(z)中还原出原序列x(n)
X ( z ) ZT [ x ( n)]
n
x (n) z n
实质:求X(z)幂级数展开式
Z反变换的求解方法: 留数定理法
部分分式法
长除法
1. 留数定理法
根据复变函数理论,可以推导出
x ( n)
1 2 j
X ( z ) z n 1dz
1 1 3z 1
n
z 2
2 n u ( n)
z 3
3
n
n
u (n 1)
x n 2 u n 3 u n 1
3. 幂级数法(长除法)
如果序列的ZT能表示成幂级数的形式,则序列x(n) 是幂 级数 说明: ①这种方法只对某些特殊的ZT有效。 ②如果ZT为有理函数,可用长除法将X(z)展开成幂级 数。 若为右边序列(特例:因果序列),将X(z)展开成负幂 级数; 若为左边序列(特例:反因果序列),将X(z)展开成正 幂级数; 中
z z 1 1 X z 1 z 2 z 3 1 2z 1 3 z 1
1 ZT [a u (n)] z a 1 1 az 1 n ZT [a u (n 1)] z a 1 1 az
数字信号处理第二章.ppt
例:已知序列x(n) R4 (n), 将x(n)以N 8为周期 进行周期延拓成x(n),求x(n)的DFS。
N 1
X (k) x(n)WNnk
n0
7
3
x(n)W8nk W8nk
n0
n0
j 2 k
j 2 2k
j 2 3k
1e 8 e 8 e 8
X (0) 4 X (1) 1 j 2 1 X (2) 0 X (3) 1 j 2 1 X (4) 0 X (5) 1 j 2 1 X (6) 0 X (7) 1 j 2 1
可以看出X~ (k)的周期性:
X~ (k
mN
)
N 1 x~(n)e j(k mN
)
2 N
n
n0
N
1
x~(n)e
j
2 N
kn
X~ (k )
n0
周期为N的 x~(n)的离散傅立叶级数只有N个不同的系数X~ (k) 。
周期序列的离散傅立叶级数对(DFS):
X~ (k )
N
1
x~(n)e
j
2 N
kn
n0
5
x(n)W6nk
n0
j 2 k
j 2 2k
14 12e 6 10e 6
j 2 3k
j 2 4k
j 2 5k
8e 6 6e 6 10e 6
X (0) 60 X (1) 9 j3 3 X (2) 3 j 3
X (3) 0 X (4) 3 j 3 X (运算的方便。
求解 X~ (k)系数:
1
N
e N 1
j
2 N
rn
n0
1 N
1 e j
2 N
现代数字信号处理第二章

该式说明:维纳滤波器的输出 s(n) 就是信号s(n) 在输 ˆ 入数据子空间 X (n) 上的正交投影,它是信号的最佳设计。
2.2.2 非因果IIR维纳滤波器
非因果IIR维纳滤波器的维纳-霍夫方程为:
Rsx (m) = ∑h(i)Rxx (m−i) −∞ ≤ m ≤ ∞
i=−∞
∞
= h(m) ∗ Rxx (m)
这种线性过滤问题,可以看成一种估计问题。
ˆ x(n) = s(n) + v(n) → h(n) → y(n) = s(n)
s(n)
表示信号
v(n)
表示噪声
N
y(n)
表示输出
ˆ y(n) = s(n) = ∑h(i)x(n −i)
s 称 y(n) 是ˆ(n) 的估计值。 h(n) 为估计器。这种滤波器 称为最佳滤波器。 s 如果: (n) 和 v(n) 的谱在频域上是分离的,容易设计一个 线性滤波器抑制噪声并提取信号。这是本科中经典数字信号 处理理论中详细讨论过的数字滤波器的设计问题。但是 s(n) 和 v(n) 的谱有一部分相互重叠,则问题就要复杂的多。 一般而言,这是信号的最佳估计问题,所谓“最佳”是以一 定的准则来衡量的,通常有四种准则:
解出: 即
[h] =[h]opt =[Rxx ]−1[Rs x ]
hopt = R−1P
用有限长 h(n) 来实现维纳滤波器时(当已知 Rx x和 Rs x 时),可解得满足因果解的 hopt 。 但当N大时,计算工作量大,需要知道 Rs x 和 Rx x 的逆运 算。因此,最小均方误差准则的维纳滤波器,用有限冲激响 应的FIR滤波器来实现并非有效的方法。
Rxx (z) = Rεε (z)B(z)B(z−1) =σε2 B(z)B(z−1)
2.2.2 非因果IIR维纳滤波器
非因果IIR维纳滤波器的维纳-霍夫方程为:
Rsx (m) = ∑h(i)Rxx (m−i) −∞ ≤ m ≤ ∞
i=−∞
∞
= h(m) ∗ Rxx (m)
这种线性过滤问题,可以看成一种估计问题。
ˆ x(n) = s(n) + v(n) → h(n) → y(n) = s(n)
s(n)
表示信号
v(n)
表示噪声
N
y(n)
表示输出
ˆ y(n) = s(n) = ∑h(i)x(n −i)
s 称 y(n) 是ˆ(n) 的估计值。 h(n) 为估计器。这种滤波器 称为最佳滤波器。 s 如果: (n) 和 v(n) 的谱在频域上是分离的,容易设计一个 线性滤波器抑制噪声并提取信号。这是本科中经典数字信号 处理理论中详细讨论过的数字滤波器的设计问题。但是 s(n) 和 v(n) 的谱有一部分相互重叠,则问题就要复杂的多。 一般而言,这是信号的最佳估计问题,所谓“最佳”是以一 定的准则来衡量的,通常有四种准则:
解出: 即
[h] =[h]opt =[Rxx ]−1[Rs x ]
hopt = R−1P
用有限长 h(n) 来实现维纳滤波器时(当已知 Rx x和 Rs x 时),可解得满足因果解的 hopt 。 但当N大时,计算工作量大,需要知道 Rs x 和 Rx x 的逆运 算。因此,最小均方误差准则的维纳滤波器,用有限冲激响 应的FIR滤波器来实现并非有效的方法。
Rxx (z) = Rεε (z)B(z)B(z−1) =σε2 B(z)B(z−1)
数字信号处理(程佩青)_第二章_Z变换
17
2. z变换的收敛域
一种最重要的右边序列:因果序列——是指在 n≥0时x(n)有值,n<0时x(n)=0的序列。其收敛
序列为:
在|z|=∞处z变换收敛是因果序列的特征。
18
2. z变换的收敛域
因果序列及其收敛域(包括z=∞ )
19
2. z变换的收敛域
(3)左边序列
在 时 有值,在 时 的序列 。其z变换为:
有一个
一阶极点。所以
31
1.围线积分法(留数法)
(2)当n≤-2时:函数 有一个 4 一阶极点。所以 在围线C外只
综合可得:
32
2.部分分式展开法
当X(z)为有理函数时,可以表示成
X(z) 可以展成下面的部分分式形式:
其中zi是X(z)的一个r阶极点 ,zk是X(z)的单极点(k=1,2……N-r),Bn是 整式部分的系数(M≥N时存在,M=N时,只有B0 项;M<N时Bn =0)。
59
任一序列总能表示成一个共轭对称序列与 一个共轭反对称序列之和。
要证明这一点,需要找到xe(n) 和xo(n) ,这 只要令xe(n) 和xo(n)满足下式即可 :
60
同样,一个序列x(n)的傅里叶变换也可以分 解成共轭对称分量与共轭反对称分量之和:
其中 ,是共轭对称的, 轭反对称的。
是共
61
(5)
若已知 X(z) = Z[x(n)] Rx_<|z|<Rx+
则有: Z [ x * (n)] X * ( z * )
(6)
若已知 则有: X(z) = Z[x(n)] Rx_<|z|<Rx+
1 Z [ x(n)] X ( ) z
48
2. z变换的收敛域
一种最重要的右边序列:因果序列——是指在 n≥0时x(n)有值,n<0时x(n)=0的序列。其收敛
序列为:
在|z|=∞处z变换收敛是因果序列的特征。
18
2. z变换的收敛域
因果序列及其收敛域(包括z=∞ )
19
2. z变换的收敛域
(3)左边序列
在 时 有值,在 时 的序列 。其z变换为:
有一个
一阶极点。所以
31
1.围线积分法(留数法)
(2)当n≤-2时:函数 有一个 4 一阶极点。所以 在围线C外只
综合可得:
32
2.部分分式展开法
当X(z)为有理函数时,可以表示成
X(z) 可以展成下面的部分分式形式:
其中zi是X(z)的一个r阶极点 ,zk是X(z)的单极点(k=1,2……N-r),Bn是 整式部分的系数(M≥N时存在,M=N时,只有B0 项;M<N时Bn =0)。
59
任一序列总能表示成一个共轭对称序列与 一个共轭反对称序列之和。
要证明这一点,需要找到xe(n) 和xo(n) ,这 只要令xe(n) 和xo(n)满足下式即可 :
60
同样,一个序列x(n)的傅里叶变换也可以分 解成共轭对称分量与共轭反对称分量之和:
其中 ,是共轭对称的, 轭反对称的。
是共
61
(5)
若已知 X(z) = Z[x(n)] Rx_<|z|<Rx+
则有: Z [ x * (n)] X * ( z * )
(6)
若已知 则有: X(z) = Z[x(n)] Rx_<|z|<Rx+
1 Z [ x(n)] X ( ) z
48
数字信号处理-第二章
N−1
N 2
上式可由多个二阶节级联实现: 上式可由多个二阶节级联实现: 级联实现
x(n) Z-1 Z-1 β01 β11 β21 Z-1 Z-1 β02 β12 β22 …... β0N/2 Z-1 β 1N/2 Z-1 β2N/2 y(n)
级联型结构特点 1、由于这种结构所需的系数比直接型多, 、由于这种结构所需的系数比直接型多, 乘法运算也比直接型多。 因而所需乘法运算也比直接型多 因而所需乘法运算也比直接型多。 2、由于这种结构的每一节控制一对零点, 、由于这种结构的每一节控制一对零点 每一节控制一对零点, 因而常在需要控制传输零点时用。 因而常在需要控制传输零点时用。 控制传输零点时用
3、频率抽样型结构 、 频率抽样型结构的导入
回忆: 回忆:频率采样定理
M点 点
x M (n)
序列傅立叶变换
X (e )
单位圆上取N点 单位圆上取 点 频域采样) (频域采样)
jω
N≥M
N点 点
= ?
离散傅立叶反变换
x N (n)
X (k )
频率抽样型滤波器结构
表示H(z)的方法,利用内插公式: 的方法, 用H(k)表示 表示 的方法 利用内插公式:
两个主要缺点 1、所有的相乘系数及H(k)都是复数,应将它们先 、所有的相乘系数及 都是复数, 都是复数 化成二阶的实数,这样乘起来较复杂 复杂, 化成二阶的实数,这样乘起来较复杂,增加乘 法次数,存储量。 法次数,存储量。 2、所有谐振器的极点都是在单位园上,由WN-k决定 、所有谐振器的极点都是在单位园上 由 考虑到系数量化的影响,当系数量化时, 考虑到系数量化的影响,当系数量化时,极点 会移动, 会移动,有些极点就不能被梳状滤波器的零点 所抵消,而这可能导致系统不稳定。 所抵消,而这可能导致系统不稳定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
T [a1x1 (n) a2 x2 (n)] a1 y1 (n) a2 y2 (n) 或同时满足:
可加性: T [ x1 (n) x2 (n)] y1 (n) y2 (n)
比例性/齐次性: T [ax1 (n)] ay1 (n)
其中:a, a1 , a2为常数
则此系统为线性系统。
y(n) x(n) h(n)
m
x(m)h(n m)
令 nm k 则 m nk
n k
x ( n k )h ( k )
k
h(k ) x(n k ) h(n ) x(n )
三、离散时间系统
一个离散时间系统是将输入序列变换成输 出序列的一种运算。
记为:T []
y (n) T [ x(n)]
x(n) 离散时间系统 T[ · ] y(n)
1、线性非移变系统
线性非移变系统又称线性移不变 系统,具有线性性(线性系统)和移不 变性(移不变系统)。
1)线性系统
若系统 T [] y1 (n) T [ x1 (n)] 满足叠加原理:
y2 (n) T [ x2 (n)]
第二章 离散时间信号与系统
一、概述
略
第二章 离散时间信号与系统 二、离散时间信号—数字序列
序列:对模拟信号xa (t ) 进行等间隔采样,采样间隔为T, 得到
xa (t )
t nT
xa (nT ) n
x n取整数。对于不同的n值, a (nT ) 是一个有序的数字序列: ...xa (T ), xa (0), xa (T ), xa (2T ),... 该数字序列就是离散时间信 号。实际信号处理中,这些数字序列值按顺序存放于存贮 器中,此时nT代表的是前后顺序。为简化,不写采样间隔, 形成x(n)信号,称为序列。
0:数字域频率
T:采样周期
数字域频率是模拟域频率对采样频率的归一化频率
7)任意序列
x(n)可以表示成单位取样序列的移位加权和, 也可表示成与单位取样序列的卷积和。
x(n) x(m) (n m) x(n) (n)
m
例: x(n) 2 (n 1) (n)
2
0
k,N,k为整数,
且k的取值保证N 是最小的正整数
分情况讨论
(1)当 为整数时 0
(2)当 为有理数时 0 (3)当
2 2
2
0
为无理数时
1)当
2
0
为整数时, 2 的周期序列
取k 1,x (n )即是周期为
0
如sin( n ), 0 , 8 N 4 4 0 该序列是周期为8的周期序列
2 例:判断系统y (n ) x (n )sin( n )是否线性 9 7 2 解:设y1 (n) T [ x1 (n)] x1 (n)sin( n ) 9 7 2 y2 (n) T [ x2 (n)] x2 (n)sin( n ) 9 7 2 T [ x1 (n) x2 (n)] [ x1 (n) x2 (n)]sin( n ) 9 7 2 2 x1 (n )sin( n ) x2 (n )sin( n ) 9 7 9 7 y1 (n ) y2 (n ) 满足可加性 2 T [ax1 (n)] ax1 (n)sin( n ) 9 7 ay1 (n),a为常数 满足比例性
ax1 (n ) ax2 (n ) b y1 (n ) y2 (n )
该系统是非线性系统
不满足可加性
2)非移变系统(移不变系统)
若系统响应与激励加于系统的时刻无关, 则称为移不变系统(或时不变系统)
对移不变系统,若T[x(n)] y ( n) 则 T [ x(n m)] y (n m),m为任意整数
x(n)代表第n个序列值, 在数值上等于信号的采样值 x(n)只在n为整数时才有意义
1、离散时间信号的表示和基本形式
1)单位取样序列
( n)
1 n 0 0 n 0
2)单位阶跃序列
1 n 0 u ( n) 0 n 0
与单位抽样序列的关系
(n) u(n) u(n 1)
x(n) x1 (n) x2 (n)
同序号n的序列值 逐项对应相乘
5)累加
y ( n)
k
x(k )
n
6)差分
前向差分:
x(n) x(n 1) x(n)
后向差分:
x(n) x(n) x(n 1)
x(n) x(n 1)
x(n) x(n 1)
第二章
离散时间信号和离散时间系统
第二章学习目标
掌握序列的概念及其几种典型序列的定义,掌 握序列的基本运算,并会判断序列的周期性。 掌握线性/移不变/因果/稳定的离散时间系统的 概念并会判断,掌握线性移不变系统及其因果性/ 稳定性判断的充要条件。 理解常系数线性差分方程及其用迭代法求解单 位抽样响应。 了解对连续时间信号的时域抽样,掌握奈奎斯 特抽样定理,了解抽样的恢复过程。
分配律
x(n) h1(n) y(n)
h2(n)
1 1 2 如sin( n ), 0 , 8 4 4 0 该序列不是周期序列
例:判断
x ( n) e
n j ( ) 6
是否是周期序列
解:x(n N ) e
j( n N ) 6
e
n N j ( ) 6 6
若x ( n )为周期序列,则必须满足x ( n ) x ( n N ), N 即满足 2 k,且N,k为整数 6
2
2)当
2
0
为有理数时,
P 表示成 ,P,Q为互为素数的整数 0 Q 取k Q,则N P,x (n )即是周期为P的周期序列
2
4 4 2 5 如sin( n ), 0 , , 5 5 0 2 该序列是周期为5的周期序列
3)当
2
0
为无理数时,
取任何整数k 都不能使N 为正整数, x ( n )不是周期序列
例:
3 x(n) sin( 2 n) 14 3 0 2 14 2 14 N T0 0 3 k T
当14T 3T0时, (n)为周期为14的周期序列 x
2、序列的能量
序列的能量为序列各抽样值的平方和
E x ( n)
n 2
3、序列的运算
移位 翻褶 和 积
1.5 (n 1) (n 2) 0.5 (n 3)
8)周期序列 若对所有n存在一个最小的正整数N,满足
x(n) x(n N ) n
则称序列x(n)是周期性序列,周期为N。
例:
x(n) sin( n) sin[ ( n 8)] 4 4
RN (n) (n m) (n) (n 1) ... [n ( N 1)]
m 0
N 1
4)实指数序列
x(n) a nu (n) a 为实数
5)复指数序列
x(n) e
( j0 ) n
e e
n
j0n
e n cos(0n) je n sin(0n)
0 为数字域频率
例: j n x(n)=0.Asin(0n )
模拟正弦信号:
xa (t ) A sin(t )
x(n) xa (t )
t nT
A sin(nT )
:模拟域频率 f s:采样频率
0 T / f s
例:试判断
2 y (n) x(n)sin( n ) 9 7
是否是移不变系统
2 解:T [ x(n m)] x(n m)sin( n ) 9 7 2 y (n m) x(n m)sin[ (n m) ] 9 7
T [ x(n m)]
4)相加:
m
x ( m) h ( n m)
n
举例说明卷积过程
n -2, y(n)=0
n=-1
n=0
n=1
y(-1)=8
y(0)=6+4=10
y(1)=4+3+6=13
n=5
n=6
n=7
y(5)=-1+1=0
y(6)=0.5
y(n)=0, n 7
卷积和与两序列的前后次序无关
累加
差分 时间尺度变换 卷积和
1)移位
序列x(n),当m>0时 x(n-m):延时/右移m位 x(n+m):超前/左移m位
2)翻褶
x(-n)是以n=0的纵轴为 对称轴将序列x(n) 加以翻褶
3)和
x(n) x1 (n) x2 (n)
同序列号n的序列值 逐项对应相加
4)积
结合律
x(n)
h1(n)
h2(n)
y(n)
x(n)
h2(n)
h1(n)
y(n)
x(n)
h1(n)*h2(n)
y(n)
x(n) * h1 (n) * h2 (n) x(n) * h2 (n) * h1(n) h(n) h1 (n) * h2 (n)
y ( n) x ( n) * h( n)
而不论k取什么整数,N 12 k都是一个无理数
x(n)不是周期序列
讨论:若一个正弦信号是由连续信号抽样 得到,则抽样时间间隔T和连续正弦信号 的周期T0之间应是什么关系才能使所得 到的抽样序列仍然是周期序列? 设连续正弦信号: