信号与系统试题库
信号与系统复习题(含答案)

试题一一. 选择题(共10题,20分) 1、n j n j een x )34()32(][ππ+=,该序列是 。
A.非周期序列B.周期3=NC.周期8/3=ND. 周期24=N2、一连续时间系统y(t)= x(sint),该系统是 。
A.因果时不变B.因果时变C.非因果时不变D.非因果时变 3、一连续时间LTI 系统的单位冲激响应)2()(4-=-t u e t h t ,该系统是 。
A.因果稳定B.因果不稳定C.非因果稳定D. 非因果不稳定4、若周期信号x[n]是实信号和奇信号,则其傅立叶级数系数a k 是 。
A.实且偶B.实且为奇C.纯虚且偶D. 纯虚且奇 5、一信号x(t)的傅立叶变换⎩⎨⎧><=2||02||1)(ωωω,,j X ,则x(t)为 。
A. t t 22sinB. tt π2sin C. t t 44sin D.t t π4sin6、一周期信号∑∞-∞=-=n n t t x )5()(δ,其傅立叶变换)(ωj X 为 。
A. ∑∞-∞=-k k )52(52πωδπ B. ∑∞-∞=-k k )52(25πωδπC. ∑∞-∞=-k k )10(10πωδπD. ∑∞-∞=-k k)10(101πωδπ7、一实信号x[n]的傅立叶变换为)(ωj e X ,则x[n]奇部的傅立叶变换为 。
A.)}(Re{ωj e X j B. )}(Re{ωj e XC. )}(Im{ωj e X j D. )}(Im{ωj e X8、一信号x(t)的最高频率为500Hz ,则利用冲激串采样得到的采样信号x(nT)能唯一表示出原信号的最大采样周期为 。
A. 500B. 1000C. 0.05D. 0.001 9、一信号x(t)的有理拉普拉斯共有两个极点s=-3和s=-5,若)()(4t x e t g t =,其傅立叶变换)(ωj G 收敛,则x(t)是 。
A. 左边B. 右边C. 双边D. 不确定10、一系统函数1}Re{1)(->+=s s e s H s,,该系统是 。
(完整版)信号与系统复习题
信号与系统试题库一、填空题绪论:1。
离散系统的激励与响应都是____离散信号 __。
2.请写出“LTI ”的英文全称___线性非时变系统 ____。
3.单位冲激函数是__阶跃函数_____的导数. 4.题3图所示波形可用单位阶跃函数表示为()(1)(2)3(3)t t t t εεεε+-+---。
5.如果一线性时不变系统的输入为f(t ),零状态响应为y f (t )=2f (t —t 0),则该系统的单位冲激响应h (t )为____02()t t δ-_________。
6。
线性性质包含两个内容:__齐次性和叠加性___。
7。
积分⎰∞∞-ω--δ-δdt )]t t ()t ([e 0t j =___01j t e ω--_______。
8。
已知一线性时不变系统,当激励信号为f (t)时,其完全响应为(3sint-2cost )ε(t );当激励信号为2f (t )时,其完全响应为(5sint+cost )ε(t),则当激励信号为3f(t )时,其完全响应为___7sint+4cost _____。
9。
根据线性时不变系统的微分特性,若:f (t)−−→−系统y f (t)则有:f ′(t)−−→−系统_____ y ′f (t )_______。
10。
信号f (n )=ε(n )·(δ(n)+δ(n-2))可_____δ(n)+δ(n —2)_______信号。
11、图1所示信号的时域表达式()f t =()(1)(1)tu t t u t --- 。
12、图2所示信号的时域表达式()f t =()(5)[(2)(5)]u t t u t u t +----。
13、已知()()()2f t t t t εε=--⎡⎤⎣⎦,则()f t '=()(2)2(2)u t u t t δ----.14、[]2cos32t d ττδτ-∞⎛⎫+ ⎪⎝⎭⎰=8()u t 。
信号与系统考试试题库

..信号与系统试题库一、填空题:1.计算 e (t 2)u(t) (t3)。
2.已知 X (s)11的收敛域为 Re{ s} 3 , X (s) 的逆变换3s1s为。
3.信号 x(t)(t )u(t )u(t t 0 ) 的拉普拉斯变换为。
4.单位阶跃响应 g (t) 是指系统对输入为的零状态响应。
5.系统函数为 H (s)1的 LTI系统是稳定的,则 H ( s) 的收敛域(s2)(s 3)为。
6.理想滤波器的频率响应为 H ( j )2,1000,,如果输入信号为100x(t)10 cos(80t) 5 cos(120t ) ,则输出响应 y(t) =。
7.因果 LTI系统的系统函数为s2则描述系统的输入输出关系的H ( s),s24s 3微分方程为。
8.一因果 LTI 连续时间系统满足:d 2 y( t )5 dy (t ) 6 y ( t ) d 2 x( t )3 dx ( t) 2 x (t ) ,则系统的单位冲激响应h(t)dt 2dt dt 2dt 11.卷积积分 x(t t1 ) *(t t 2 )。
12.单位冲激响应 h(t ) 是指系统对输入为的零状态响应。
13. e 2t u(t) 的拉普拉斯变换为。
14.11的收敛域为3Re{ s} 2 , X (s) 的逆变换已知 X (s)ss 23为。
15.连续 LTI 系统的单位冲激响应h(t )满足,则系统稳定。
16.已知信号 x(t ) cos(0t ) ,则其傅里叶变换为。
17.设调制信号 x(t) 的傅立叶变换 X ( j)已知,记已调信号 y(t ) 的傅立叶变换为Y( j) ,载波信号为 c(t)e j0t , 则Y ( j )=。
18.因果 LTI 系统的系统函数为H (s)s 1,则描述系统的输入输出关系的微5ss26分方程为。
19一连续时间周期信号表示为 x(t)a k e jk0t,则 x(t ) 的傅立叶变换kX ( j) =。
信号与系统标准试题库附答案
35.线性系统具有( D) A.分解特性 B。零状态线性 C。零输入线性 D。ABC
36.设系统零状态响应与激励的关系是: y zs (t ) f (t ) ,则以下表述不对的是( A ) A.系统是线性的 B。系统是时不变的 C。系统是因果的 ( B ) C。4 Hz D。8 Hz D。系统是稳定的
17、如图所示:f(t)为原始信号,f1(t)为变换信号,则 f1(t)的表达式是( D
)
A、f(-t+1) C、f(-2t+1)
B、f(t+1) D、f(-t/2+1)
4
18、若系统的冲激响应为 h(t),输入信号为 f(t),系统的零状态响应是( C )
19。信号 f (t ) 2 cos
1 > 2 , 则信号 f (t ) f 1 (t 1) f 2 (t 2) 的奈奎斯特取样频率为( C )
A. 1 B。 2 C。 1 + 2 D。 1 2
58.某信号的频谱是周期的离散谱,则对应的时域信号为( D ) A.连续的周期信号 C.离散的非周期信号 B。连续的非周期信号 D。离散的周期信号
D。50 rad/s
3
15、已知信号 f (t ) 如下图(a)所示,其反转右移的信号 f1(t) 是( D
)
16、已知信号 f1 (t ) 如下图所示,其表达式是( B)
A、ε(t)+2ε(t-2)-ε(t-3) C、ε(t)+ε(t-2)-ε(t-3)
B、ε(t-1)+ε(t-2)-2ε(t-3) D、ε(t-1)+ε(t-2)-ε(t-3)
6
33.设一个矩形脉冲的面积为 S,则矩形脉冲的 FT(傅氏变换)在原点处的函数值等于( D A.S/2 B。S/3 C。S/4 D。S
信号与系统复习题(含答案)
试题一一. 选择题(共10题,20分) 1、n j n j een x )34()32(][ππ+=,该序列是 。
A.非周期序列 B 。
周期3=N C 。
周期8/3=N D 。
周期24=N2、一连续时间系统y (t)= x (sint),该系统是 。
A 。
因果时不变B 。
因果时变C 。
非因果时不变 D.非因果时变 3、一连续时间LTI 系统的单位冲激响应)2()(4-=-t u e t h t ,该系统是 。
A 。
因果稳定 B.因果不稳定 C.非因果稳定 D 。
非因果不稳定4、若周期信号x[n]是实信号和奇信号,则其傅立叶级数系数a k 是 .A 。
实且偶 B.实且为奇 C 。
纯虚且偶 D. 纯虚且奇 5、一信号x(t)的傅立叶变换⎩⎨⎧><=2||02||1)(ωωω,,j X ,则x (t)为 。
A 。
t t 22sinB 。
tt π2sin C 。
t t 44sin D 。
t t π4sin6、一周期信号∑∞-∞=-=n n t t x )5()(δ,其傅立叶变换)(ωj X 为 。
A. ∑∞-∞=-k k )52(52πωδπ B 。
∑∞-∞=-k k )52(25πωδπC 。
∑∞-∞=-k k )10(10πωδπD 。
∑∞-∞=-k k)10(101πωδπ7、一实信号x [n ]的傅立叶变换为)(ωj e X ,则x[n]奇部的傅立叶变换为 。
A.)}(Re{ωj e X j B 。
)}(Re{ωj e XC 。
)}(Im{ωj e X j D. )}(Im{ωj e X8、一信号x(t )的最高频率为500Hz ,则利用冲激串采样得到的采样信号x (nT )能唯一表示出原信号的最大采样周期为 .A 。
500 B. 1000 C. 0。
05D 。
0。
0019、一信号x(t)的有理拉普拉斯共有两个极点s=-3和s=-5,若)()(4t x e t g t=,其傅立叶变换)(ωj G 收敛,则x (t)是 。
信号与系统试题库整理
信号与系统试题库整理 IMB standardization office【IMB 5AB- IMBK 08- IMB 2C】信号与系统试题库一、选择题共50题1.下列信号的分类方法不正确的是(A):A、数字信号和离散信号B、确定信号和随机信号C、周期信号和非周期信号D、因果信号与反因果信号2.下列说法正确的是(D):A、两个周期信号x(t),y(t)的和x(t)+y(t)一定是周期信号。
B、两个周期信号x(t),y(t)的周期分别为2和2,则其和信号x(t)+y(t)是周期信号。
C、两个周期信号x(t),y(t)的周期分别为2和 ,其和信号x(t)+y(t)是周期信号。
D、两个周期信号x(t),y(t)的周期分别为2和3,其和信号x(t)+y(t)是周期信号。
3.下列说法不正确的是(D)。
A、一般周期信号为功率信号。
B、时限信号(仅在有限时间区间不为零的非周期信号)为能量信号。
C、ε(t)是功率信号;D、e t为能量信号;4.将信号f(t)变换为(A)称为对信号f(t)的平移或移位。
A、f(t–t0)B、f(k–k0)C、f(at)D、f(-t)5.将信号f(t)变换为(A)称为对信号f(t)的尺度变换。
A、f(at)B、f(t–k0)C、f(t–t0)D、f(-t)6.下列关于冲激函数性质的表达式不正确的是(B)。
A 、)()0()()(t f t t f δδ=B 、()t aat δδ1)(=C 、)(d )(t t εττδ=⎰∞-D 、)()-(t t δδ=7.下列关于冲激函数性质的表达式不正确的是(D )。
A 、⎰∞∞-='0d )(t t δB 、)0(d )()(f t t t f =⎰+∞∞-δC 、)(d )(t tεττδ=⎰∞-D 、⎰∞∞-=')(d )(t t t δδ8.下列关于冲激函数性质的表达式不正确的是(B )。
A 、)()1()()1(t f t t f δδ=+B 、)0(d )()(f t t t f '='⎰∞∞-δC 、)(d )(t tεττδ=⎰∞-D 、)0(d )()(f t t t f =⎰+∞∞-δ9.)1()1()2(2)(22+++=s s s s H ,属于其零点的是(B )。
信号与系统分析试题

信号与系统分析试题一、选择题1. 下面哪个选项描述了离散时间信号的特点?A. 信号取值连续,时间离散B. 信号取值离散,时间连续C. 信号取值连续,时间连续D. 信号取值离散,时间离散2. 信号能否同时具备连续时间和离散时间的特点?A. 能B. 不能3. 如果一个信号是周期信号,那么它一定满足的条件是什么?A. 信号的幅度呈周期性变化B. 信号的频率是一个特定值C. 信号的周期是一个特定值D. 信号的相位呈周期性变化4. 傅里叶变换广泛应用于哪些领域?A. 通信工程B. 电力系统分析C. 图像处理与分析D. 所有选项都正确5. 一个系统的单位冲激响应是指什么?A. 输入为单位冲激信号时的输出B. 输入为单位阶跃信号时的输出C. 输入为正弦信号时的输出D. 输入为余弦信号时的输出二、填空题1. 一个信号的宽度可以通过它的_____________来衡量。
2. _____________是一种常用的信号处理方法,可以将信号从时域转换到频域。
3. 离散时间信号与连续时间信号之间的转换可以通过_____________和_____________实现。
4. 一个系统的单位冲激响应与其_____________密切相关。
5. Z变换的变量_____________通常表示离散时间信号。
三、简答题1. 解释什么是时域分析,频域分析和复域分析,并说明它们在信号与系统分析中的应用。
2. 为什么在信号处理过程中会使用傅里叶变换?3. 请简要介绍卷积的定义和性质。
4. 简述拉普拉斯变换的定义和主要性质。
5. 解释什么是系统的冲击响应,并说明冲击响应的重要性。
四、计算题1. 计算以下离散时间信号的宽度:x[n] = {2, 4, 6, 8, 6, 4, 2}2. 已知离散时间信号x[n]的Z变换为X(z) = (1 + z^-1)/(1 - z^-1),计算x[n]。
参考答案:一、选择题1. B2. 不能3. C4. D5. A二、填空题1. 带宽2. 傅里叶变换3. 采样和保持4. 频率响应5. z三、简答题1. 时域分析是对信号在时间上的变化进行观察和分析,频域分析是对信号的频率特性进行研究,复域分析是使用复数的方法来表示信号和系统。
信号与系统试题库史上最全(内含答案)
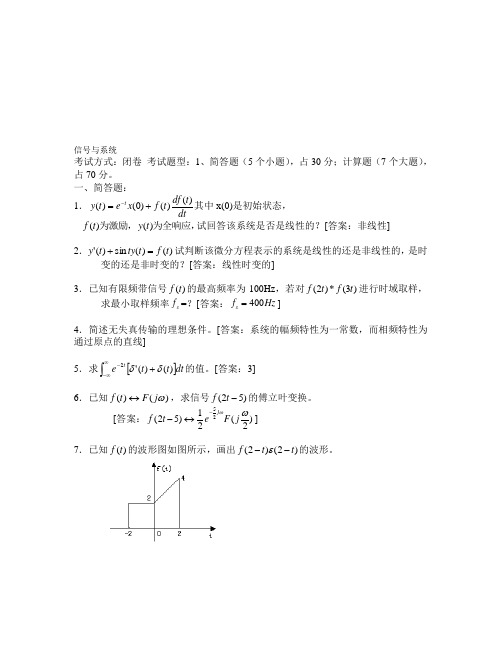
信号与系统考试方式:闭卷 考试题型:1、简答题(5个小题),占30分;计算题(7个大题),占70分。
一、简答题:1.dtt df t f x e t y t )()()0()(+=-其中x(0)是初始状态,为全响应,为激励,)()(t y t f 试回答该系统是否是线性的?[答案:非线性]2.)()(sin )('t f t ty t y =+试判断该微分方程表示的系统是线性的还是非线性的,是时变的还是非时变的?[答案:线性时变的]3.已知有限频带信号)(t f 的最高频率为100Hz ,若对)3(*)2(t f t f 进行时域取样,求最小取样频率s f =?[答案:400s f Hz =]4.简述无失真传输的理想条件。
[答案:系统的幅频特性为一常数,而相频特性为通过原点的直线]5.求[]⎰∞∞--+dt t t e t )()('2δδ的值。
[答案:3]6.已知)()(ωj F t f ↔,求信号)52(-t f 的傅立叶变换。
[答案:521(25)()22j f t e F j ωω--↔]7.已知)(t f 的波形图如图所示,画出)2()2(t t f --ε的波形。
[答案: ]8.已知线性时不变系统,当输入)()()(3t e e t x t t ε--+=时,其零状态响应为)()22()(4t e e t y t t ε--+=,求系统的频率响应。
[答案:())4)(2(52)3(++++ωωωωj j j j ]9.求象函数2)1(32)(++=s s s F ,的初值)0(+f 和终值)(∞f 。
[答案:)0(+f =2,0)(=∞f ]10.若LTI 离散系统的阶跃响应为)(k g ,求其单位序列响应。
其中:)()21()(k k g k ε=。
[答案:1111()()(1)()()()(1)()()(1)222k k k h k g k g k k k k k εεδε-=--=--=--]11.已知()1 1 , 0,1,20 , k f k else ==⎧⎨⎩ ,()2 1 , 0,1,2,30 , k k f k else -==⎧⎨⎩设()()()12f k f k f k =*,求()3?f =。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.下列信号的分类方法不正确的是( A ):A 、数字信号和离散信号B 、确定信号和随机信号C 、周期信号和非周期信号D 、因果信号与反因果信号2.下列说法正确的是( D ):A 、两个周期信号x (t ),y (t )的和x (t )+y(t )一定是周期信号。
B 、两个周期信号x (t ),y (t )的周期分别为2和2,则其和信号x (t )+y(t ) 是周期信号。
C 、两个周期信号x (t ),y (t )的周期分别为2和π,其和信号x (t )+y(t )是周期信号。
D 、两个周期信号x (t ),y (t )的周期分别为2和3,其和信号x (t )+y(t )是周期信号。
3.下列说法不正确的是( D )。
A 、一般周期信号为功率信号。
B 、 时限信号(仅在有限时间区间不为零的非周期信号)为能量信号。
C 、ε(t )是功率信号;D 、e t 为能量信号;4.将信号f (t )变换为( A )称为对信号f (t )的平移或移位。
A 、f (t –t 0) B 、f (k–k 0) C 、f (at ) D 、f (-t )5.将信号f (t )变换为( A )称为对信号f (t )的尺度变换。
A 、f (at ) B 、f (t –k 0) C 、f (t –t 0) D 、f (-t )6.下列关于冲激函数性质的表达式不正确的是( B )。
A 、)()0()()(t f t t f δδ=B 、()t aat δδ1)(=C 、)(d )(t tεττδ=⎰∞- D 、)()-(t t δδ=7.下列关于冲激函数性质的表达式不正确的是( D )。
A 、⎰∞∞-='0d )(t t δ B 、)0(d )()(f t t t f =⎰+∞∞-δC 、)(d )(t tεττδ=⎰∞- D 、⎰∞∞-=')(d )(t t t δδ8.下列关于冲激函数性质的表达式不正确的是( B )。
A 、)()1()()1(t f t t f δδ=+B 、)0(d )()(f t t t f '='⎰∞∞-δC 、)(d )(t tεττδ=⎰∞- D 、)0(d )()(f t t t f =⎰+∞∞-δ9.下列基本单元属于数乘器的是( A ) 。
A 、B 、C 、D 、10.下列基本单元属于加法器的是(C ) 。
A 、B 、C 、D 、11.)1()1()2(2)(22+++=s s s s H ,属于其零点的是( B )。
A 、-1B 、-2C 、-jD 、j12.)2)(1()2(2)(-++=s s s s s H ,属于其极点的是( B )。
A 、1B 、2C 、0D 、-213.下列说法不正确的是( D )。
A 、H (s)在左半平面的极点所对应的响应函数为衰减的。
即当t →∞时,响应均趋于0。
B 、 H (s)在虚轴上的一阶极点所对应的响应函数为稳态分量。
C 、 H (s)在虚轴上的高阶极点或右半平面上的极点,其所对应的响应函数都是递增的。
D 、H (s)的零点在左半平面所对应的响应函数为衰减的。
即当t →∞时,响应均趋于0。
14.下列说法不正确的是( D )。
A 、H(z)在单位圆内的极点所对应的响应序列为衰减的。
即当k →∞时,响应均趋于0。
f (t )?a f(t )f 1(t )t )f (t )?a f (t )f 1(t )t )B、H(z)在单位圆上的一阶极点所对应的响应函数为稳态响应。
C、H(z)在单位圆上的高阶极点或单位圆外的极点,其所对应的响应序列都是递增的。
即当k→∞时,响应均趋于∞。
D、H(z)的零点在单位圆内所对应的响应序列为衰减的。
即当k→∞时,响应均趋于0。
.15.对因果系统,只要判断H(s)的极点,即A(s)=0的根(称为系统特征根)是否都在左半平面上,即可判定系统是否稳定。
下列式中对应的系统可能稳定的是[ B ]A、s3+2008s2-2000s+2007B、s3+2008s2+2007sC、s3-2008s2-2007s-2000D、s3+2008s2+2007s+200016.序列的收敛域描述错误的是( B ):A、对于有限长的序列,其双边z变换在整个平面;B、对因果序列,其z变换的收敛域为某个圆外区域;C、对反因果序列,其z变换的收敛域为某个圆外区域;D、对双边序列,其z变换的收敛域为环状区域。
17.If f1(t) ←→F1(jω),f2(t) ←→F2(jω) Then[ C]A、[a f1(t) + b f2(t) ] ←→[a F1(jω) *b F2(jω) ]B、[a f1(t) + b f2(t) ] ←→[a F1(jω) - b F2(jω) ]C、[a f1(t) + b f2(t) ] ←→[a F1(jω) + b F2(jω) ]D、[a f1(t) + b f2(t) ] ←→[a F1(jω) /b F2(jω) ]2.ε(3-t) ε(t)= (A)A .ε(t)- ε(t-3)B .ε(t)C .ε(t)- ε(3-t)D .ε(3-t)18 .已知f (t) ,为求f (t0-at) 则下列运算正确的是(其中t 0 ,a 为正数)(B)A .f (-at) 左移t 0B .f (-at) 右移C .f (at) 左移t 0D .f (at) 右移19 .某系统的系统函数为H (s ),若同时存在频响函数H (j ω),则该系统必须满足条件(C)A .时不变系统B .因果系统C .稳定系统D .线性系统20.If f (t) ←→F(jω) then[ A]A、F( j t ) ←→2πf (–ω)B、F( j t ) ←→2πf (ω)C、F( j t ) ←→f (ω)D、F( j t ) ←→f (ω)21.If f1(t) ←→F1(jω),f2(t) ←→F2(jω),Then [ A]A、f1(t)*f2(t) ←→F1(jω)F2(jω)B、f1(t)+f2(t) ←→F1(jω)F2(jω)C、f1(t) f2(t) ←→F1(jω)F2(jω)D、f1(t)/f2(t) ←→F1(jω)/F2(jω)22.下列傅里叶变换错误的是[ D]A 、1←→2πδ(ω)B 、e j ω0 t ←→ 2πδ(ω–ω0 )C 、 cos(ω0t) ←→ π[δ(ω–ω0 ) +δ(ω+ω0 )]D 、sin(ω0t)= j π[δ(ω+ω0 ) + δ(ω – ω0 )]23、若f(t) ←→ F(s) , Re[s]>σ0,且有实数a>0 ,则f(at) ←→ [ B ]A 、)(1a s F aB 、)(1a sF a Re[s]>a σ0C 、)(a s FD 、)(1a sF a Re[s]>σ024、若f(t) <----->F(s) , Re[s]>σ0, 且有实常数t0>0 ,则[ B ] A 、f(t-t0)ε(t-t0)<----->e -st0F(s)B 、f(t-t0)ε(t-t0)<----->e -st0F(s) , Re[s]>σ0C 、f(t-t0)ε(t-t0)<----->e st0F(s) , Re[s]>σ0D 、f(t-t0)ε(t-t0)<----->e -st0F(s) , Re[s]>025、对因果系统,只要判断H(s)的极点,即A(s)=0的根(称为系统特征根)在平面上的位置,即可判定系统是否稳定。
下列式中对应的系统可能稳定的是[ D ] A 、s 3+4s 2-3s+2 B 、s 3+4s 2+3s C 、s 3-4s 2-3s-2 D 、s 3+4s 2+3s+226.已知 f (t) ,为求 f (3-2t) 则下列运算正确的是( C ) A . f (-2t) 左移 3 B . f (-2t) 右移 C . f (2t) 左移3 D . f (2t) 右移27.某系统的系统函数为 H ( s ),若同时存在频响函数 H ( j ω),则该系统必须满足条件( A )A .时不变系统B .因果系统C .稳定系统D .线性系统28..对因果系统,只要判断H(s)的极点,即A(s)=0的根(称为系统特征根)是否都在左半平面上,即可判定系统是否稳定。
下列式中对应的系统可能稳定的是[ B ] A 、s 3+2008s 2-2000s+2007 B 、s 3+2008s 2+2007s C 、s 3-2008s 2-2007s-2000 D 、s 3+2008s 2+2007s+200029 .ε (6-t) ε (t)= ( A )A .ε (t)- ε (t-6)B .ε (t)C .ε (t)- ε (6-t)D .ε (6-t) 30.If f (t ) ←→F (j ω) then[ A ]A 、F ( j t ) ←→ 2πf (–ω)B 、F ( j t ) ←→ 2πf (ω)C 、F ( j t ) ←→ f (ω)D 、F ( j t ) ←→ f (ω)31.If f 1(t ) ←→F 1(j ω), f 2(t ) ←→F 2(j ω),Then [ A ] A 、 f 1(t )*f 2(t ) ←→F 1(j ω)F 2(j ω) B 、 f 1(t )+f 2(t ) ←→F 1(j ω)F 2(j ω) C 、 f 1(t ) f 2(t ) ←→F 1(j ω)F 2(j ω)D、f1(t)/f2(t) ←→F1(jω)/F2(jω)32.若f(t) ←→F(s) , Re[s]>σ0,则f(2t) ←→[ D ]A、)2(21sF B、)2(21sF Re[s]>2σ0C、)2(sF D、)2(21sF Re[s]>σ033、下列傅里叶变换错误的是[ B ]A、1←→2πδ(ω)B、e j ω0 t ←→2πδ(ω–ω0 )C、cos(ω0t) ←→π[δ(ω–ω0 ) +δ(ω+ω0 )]D、sin(ω0t)= jπ[δ(ω+ω0 ) + δ(ω–ω0 )]34、若f(t) <----->F(s) , Re[s]>σ0, 且有实常数t0>0 ,则[ B ]A、f(t-t0)ε(t-t0)<----->e-st0F(s)B、f(t-t0)ε(t-t0)<----->e-st0F(s) , Re[s]>σ0C、f(t-t0)ε(t-t0)<----->e st0F(s) , Re[s]>σ0D、f(t-t0)ε(t-t0)<----->e-st0F(s) , Re[s]>035、If f1(t) ←→F1(jω),f2(t) ←→F2(jω) Then[ D ]A、[a f1(t) + b f2(t) ] ←→[a F1(jω) *b F2(jω) ]B、[a f1(t) + b f2(t) ] ←→[a F1(jω) - b F2(jω) ]C、[a f1(t) + b f2(t) ] ←→[a F1(jω) + b F2(jω) ]D、[a f1(t) + b f2(t) ] ←→[a F1(jω) /b F2(jω) ]36、函数f(t) 的图像如图所示,f(t)为[ C ]A .偶函数B .奇函数C .奇谐函数D .都不是37、函数f(t) 的图像如图所示,f(t)为[ B ]A .偶函数B .奇函数C .奇谐函数D .都不是38.系统的幅频特性|H(jω)|和相频特性如图(a)(b)所示,则下列信号通过该系统时,不产生失真的是[ D ](A) f(t) = cos(t) + cos(8t)(B) f(t) = sin(2t) + sin(4t) (C) f(t) = sin(2t) sin(4t) (D) f(t) = cos2(4t)39.系统的幅频特性|H(j ω)|和相频特性 如图(a)(b)所示,则下列信号通过 该系统时,不产生失真的是[ C ] (A) f(t) = cos(2t) + cos(4t) (B) f(t) = sin(2t) + sin(4t) (C) f(t) = sin2(4t)(D) f(t) = cos2(4t)+ sin(2t)40.计算ε (3-t) ε (t)= ( A ) A .ε (t)- ε (t-3) B .ε (t)C .ε (t)- ε (3-t)D .ε (3-t)41 .已知 f (t ) ,为求 f (t 0-at ) 则下列运算正确的是(其中 t 0 , a 为正数)( B ) A . f (-at ) 左移 t 0 B . f (-at ) 右移 C . f (at ) 左移 t 0D . f (at ) 右移42 .某系统的系统函数为 H ( s ),若同时存在频响函数 H ( j ω),则该系统必须满足条件( C ) A .时不变系统 B .因果系统 C .稳定系统D .线性系统 43 .信号 f(5-3t) 是( D ) A . f(3t) 右移 5 B . f(3t) 左移 C . f( - 3t) 左移 5D . f( - 3t) 右移 44. 题图中 f(t) 是周期为 T 的周期信号, f(t) 的三角函数形式的傅里叶级数系数的特点是 ( )A. 仅有正弦项B. 既有正弦项和余弦项,又有直流项C. 既有正弦项又有余弦项D. 仅有余弦项45. 某系统的微分方程为 y ′ (t)+3y(t)= 2f ′ (t) 则系统的阶跃响应 g(t) 应为 ( ) 。