自动控制原理第3章
自动控制原理第三章
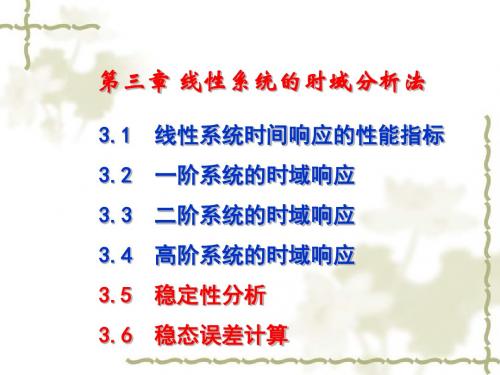
σ % = 0没有超调,非周期响应,
惯性环节亦称非周期环节。
t s = 3 T ( ± 5 % 误差带 t s = 4 T ( ± 2 % 误差带 T 越小, )
C(t)
1 1/T斜率 0.632
h (t ) = 1 − e − t /T
)
0
系统的快速性越好。
T
t
1.
一阶系统的结构图如图所示,若kt=0.1,试求系统的调节时间ts,如果要求 ts= 0.1秒。试求反馈系数应取多大?
§3-1 控制系统的时域指标
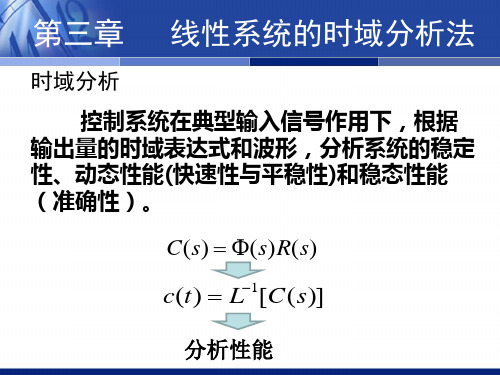
h(t)
σ
1.0
误 差 带 5%或 2%
td 0.5
h(∞)
0
tr tp ts
控制系统的时域性能指标,是根据系统在单位阶跃函数作用下的时间 响应——单位阶跃响应确定的,通常以y(t)表示。
1、超调量σ% 、超调量 响应曲线超出稳态值的最大偏差与稳态值之比。 y (t ) − y (∞) 即 超调量表示系统响应过冲的 σ% = × 100% y (∞ ) 程度 。 2、上升时间tr 响应曲线从零首次上升到稳态值h(∞)所需的时间,称为 上升时间。对于响应曲线无振荡的系统,tr是响应曲线从 tr 稳态值的10%上升到90 %所需的时间。 延迟时间td:响应曲线第一次到达终值一半所需的时间。 3、峰值时间tp
§3-2 一阶系统的阶跃响应
一、一阶系统的数学模型
dy (t ) + y (t ) = x(t ),T为时间常数。 dt 1 k 1 = , k = 为开环增益 开环传递函数:G0 ( s) = T Ts s G0 ( s) Y ( s) 1 闭环传递函数:G(s) = = = X ( s) 1 + G0 ( s) Ts + 1 微分方程为:T
第三章自动控制原理

K0
K
T02s2 2 0T0s (1 K0 ) T 2s2 2Ts 1
自己做!
T T0 1 K0
K K0 1 K0
0
1 K0
R(s) + -
K 01 T01s 1
K02 C(s)
T02s 1
(s)
T
2s2
1
2Ts
1
s2
n2 2 n s
n2
n
1 T
C(s)
(s)
1 s
s2
n2 2 n s
N (s) b0sm b1sm1 bm1s bm
系统的响应为C(s)的拉氏反变换
c(t)
L1
N(s) D(s)
R(s)
L1
1 D(s)
Nr0
(s)
Nc0
(s)
由输入信号引起
由初始状态引起
C(s) N(s) R(s) N(s) P(s)
D(s)
D(s) Q(s)
R(s) P(s) Q(s)
n
展成部分分式: C(s)
Ai
l
Bk
i1 s si k1 s sk
si—D(s)=0的根,即系统传递函数的极点。
sk—Q(s)=0的根,和系统输入信号的形式有关。
得到系统的零状态响应为:
n
l
C(s) Aiesit Bkeskt
i1
k 1
零状态响应的暂态分量 零状态响应的稳态分量
给定输入是单位阶跃函数,系统输出即为单位阶跃响应
t
1 L[t] s2 0
1
t
三、抛物线函数(加速度阶跃函数)
r
(t
)
1 2
t
2
自动控制原理第三章

0.368/T 0.135/T 0.05/T
时输出称为脉冲(冲激)响应 函数,以h(t)标志。 t 1 T h( t ) C 脉冲 ( t ) e T
0
T
2T
3T
t
求系统闭环传函提供了实验方法,以单位脉冲输入信号作用于 系统,测定出系统的单位脉冲响应,可以得到闭环传函。
六. 二阶系统的时域分析
=e
ts T
( 取5%或2%)
t s 3T ( 5% ) t s 4T ( 2% )
T反映了系统的 惯性。 T越小惯性越小, 响应快! T越大,惯性越 大,响应慢。
2. 单位斜坡响应 [ r(t) = t ]
1 1 1 T T C ( s) 2 2 Ts 1 s s s s 1 T c( t ) t T Te t / T ( t 0)
1. 阶跃函数(位置函数) A r(t) 0 记为 1(t) t0 t0
f(t)
1
令 A 1 称单位阶跃函数, 1 s
R(s) L1(t)
0
t
2. 斜坡函数 (等速度函数)
At t 0 r (t ) 0 t0
A=1,称单位斜坡函数,记为 t· 1(t)
i t
i 1
n
y p (t) 是强迫响应, fi 由输入信号决定。 C
零输入响应是系统的输入为零时,系统的 初始状态所引起的响应。 零输入响应表示为:
y x (t) C xi e
i 1
n
i t
C xi 由初始状态决定。
两种分解方法的关系是:
y(t) Ci e y p (t) i 1 强迫响应
自动控制原理——第3章

第三章 时域分析法
系统的特征方程
Js + Fs + K = 0
2
F 称为实际阻尼系数。 称为实际阻尼系数。 当
F = 4JK
2
特征方程有一对相等的负实根, 时 , 特征方程有一对相等的负实根 , 系统 处于临界阻尼状态。 处于临界阻尼状态。 为临界阻尼系数, 令Fc为临界阻尼系数,则
Fc = 2 JK
解: (1) 由结构图写出闭环传递函数
100 / s 10 C ( s) Φ( s ) = = = R( s ) 1 + 100 × 0.1 0.1s + 1 s
自动控制原理
第三章 时域分析法
的分母多项式看出时间常数T=0.1 s, 从Φ(s)的分母多项式看出时间常数 的分母多项式看出时间常数 , 故调节时间 ts = 3T = 3 × 0.1 s = 0.3 s (2) 计算 s=0.1 s的反馈系数值 计算t 的反馈系数值 设反馈系数为Kh,则系统闭环传递函数 设反馈系数为
1/K h 100 / s Φ( s ) = = 100 0.01 1+ s +1 × Kh s Kh 0.01 T= Kh
故
自动控制原理
第三章 时域分析法
调节时间
0.03 ts =3T = Kh
要求t 要求 s=0.1 s,代入上式得 ,
0.03 0.1= Kh
所以
K h =0.3
自动控制原理
第三章 时域分析法
实际阻尼系数 临界阻尼系数
ξ=
F F = = Fc 2 JK
闭环传递函数写成如下一般形式
2 ωn Φ( s ) = 2 2 s + 2ξωn s + ωn
自动控制原理第三章(胡寿松)
11
成都信息工程学院控制工程系
第一章 自动控制的一般概念
注意:
1.不同性质的控制系统,对稳定性、准 确性和快速性要求各有侧重。 2.系统的稳定性、准确性、快速性相互 制约,应根据实际需求合理选择。
12
成都信息工程学院控制工程系
第三章 线性系统的时域分析法
延迟时间td:响应曲线第一次到达终值一半所需的 时间。
调节时间ts:响应曲线开始进入并保持在误差带内所需的 最小时间,误差带通常取 5 % h ( )或 2 % h ( )
h(t)
1.0
误 差 带 5%或 2%
0.5
td
h()
0
tr tp ts
16
成都信息工程学院控制工程系
第三章 线性系统的时域分析法
超调量σ%:响应曲线超出稳态值的最大偏差与稳态值 之比。即:
快速性:输出量产生偏差时,系统消除这种偏差的快 慢程度。快速性表征系统的动态性能。一般用过渡过 程的时间来表示,如:上升时间、峰值时间、调节 时间等。
10
成都信息工程学院控制工程系
第一章 自动控制的一般概念
准确性:是衡量控制系统控制精度的重要标志。一般 用被控量的稳态值与期望值之间的误差(称为稳态误 差)表示。
成都信息工程学院控制工程系
3
第一章 自动控制的一般概念
⑴阶跃函数
Step Signal 5 4 3 2 1 0 -1 -1 0 1 2 3 4 t 5 r(t)
函数表达式:
当A=1时称为单位阶跃信号。
阶跃信号:含宽频带谐波分量,产生容易,是最常 用系统性能测试信号。
4
成都信息工程学院控制工程系
第一章 自动控制的一般概念
自动控制原理第三章
P75 二阶系统的 结构图
20
2019/4/2
《自动控制原理》第三章
1、无阻尼情况 ( 0)
s 1 ct (t ) L [ 2 ] cos nt t 0 2 s n
等幅振 荡
特征方程有一对共轭虚根 s1,2 jn 2、欠阻尼情况 (0 1)
2019/4/2
《自动控制原理》第三章
7
三.劳斯稳定判据的应用
1、判断系统的稳定性 例: a3 s 3 a2 s 2 a1s a0 0 解:
判断稳定性。
s
3
a3 a2 a1a2 a3 a0 a2 a0
a1 a0 0
0 0
s2 s1 s
0
三阶系统稳定的充要条件是: ai
2019/4/2
瞬态ct (t ) e
ct (t )
t
T
, 稳态css (t ) 1(t )
css (t )
dc(t ) 1 e t /T dt t 0 T
c(t )
t 0
1 T
+
=
2019/4/2
《自动控制原理》第三章
18
二.一阶系统的动态性能指标
c(t )
t 3T
(1 e
t /T
)
t 3T
1 e
3T /T
0.95
T0 T 1 K0
ts 3T
ts 是一阶系统的动态性能指标。
增大系统的开环放大系数K0 会使T 减小,使ts 减小。
2019/4/2
《自动控制原理》第三章
19
第四节
二阶系统的动态性能指标
二阶标准型 或称典型二阶系 统传递函数
自动控制原理第3章控制系统的稳定性及特性

lim c (t ) 0 lim c (t )
t
线性系统稳定的充要条件: 闭环系统特征方程的所有根均具有负实部, 或其特征根全部位于s平面的左半部。
C(s) 1 例. 试判断系统 3 的稳定性。 2 R(s) s 4s 5s 2 解 : s 3 4s 2 5s 2 0
C (s) G1 ( s )G2 ( s ) (s) R ( s ) 1 G1 ( s )G2 ( s ) H ( s )
R(s) E(s) Y(s) N(s) G1(s) X1(s) X (s) 2 G2(s) H(s) C(s)
2. 扰动作用下的闭环系统的传递函数
令R ( s ) 0 C (s) N (s)
R(s) E(s)
G2 ( s ) 1 G1 ( s ) 2 G ( s ) H ( s )
-
N(s) X1(s) X (s) G1(s) 2 G2(s) H(s)
C(s)
f (s)
Y(s)
定义:C(s)/N(s)为被控信号对于扰动信号的闭环 传函,记为 f ( S )。
E (s) R(s) 1 G1 (s)G 2 (s)H(s) E (s) R(s) R(s) 1 G(s) G2 ( s ) H ( s ) N ( s ) 1 G1 ( s ) G 2 ( s ) H ( s )
n
n -1
... a1s a 0 0
(1)特征方程的各项系数ai(i=1,2,…,n)都不为零;
(2)特征方程的各项系数ai(i=1,2,…,n)具有相同的符号。
充分条件: 劳斯阵列第一列所有元素为正。
劳斯阵列 s n a n a n -2 a n -4 a n -6 ...... n -1 s a n -1 a n -3 a n -5 a n -7 ...... n -2 s b1 b 2 b 3 ....... s n -3 c1 c 2 ...... ...... ...... a n1a n2 a n a n3 a n1a n4 a n a n5 b1 b2 a n1 a n1 a n1a n6 a n a n7 b3 a n1 b1a n3 a n1b2 b1a n5 a n1b3 c1 c2 b1 b1
自动控制原理第三章
(1)延迟时间 t d :曲线第一次达到终值一半 所需的时间。 (2)上升时间 t :响应曲线从终值10%上 升到90%所需的时间;对于欠阻尼系统 可定义为响应从零第一次上升到终值所 需的时间。 (3)峰值时间 t p :响应超过终值到达第一个 峰值所需的时间。 ) (4)超调量M :响应的最大偏离量c(t 与终值 c (∞ ) 之差的百分比,即
图3-10
0 < ζ < 1 时的单位阶跃响应
0 < ζ < 1情况下二阶系统单位阶跃响应的暂态
性能的各项指标。 ①上升时间 tr :是指在暂态过程中第一次达 到稳态值的时间。
π − arctan
tr = 1−ζ 2
ζ
2
ωn 1 − ζ
=
1
ωd
(π − arctan
1− ζ 2
ζ
)
tp
②峰值时间t p :是指响应由零上升到第一个峰 值所需的时间。
3.3.2 单位阶跃响应
对于单位阶跃输入r(t)=1(t),R(s)=1/s,得到系统 的输出为
2 ωn s + 2ζωn 1 C ( s) = Φ( s) R( s) = = − 2 2 2 2 s ( s + 2ζωn s + ωn ) s s + 2ζωn s + ωn
当 ζ 为不同值时,所对应的响应具有不同 的形式。 (1)当 ζ = 0时,为零阻尼情况,系统的输出 为 ω 1 s
(t ≥ 0)
1 − t T
e(t ) = r (t ) − c(t ) = Tt − T (1 − e
2
)
表3-1 一阶系统对典型输入信号的响应
传递函数 输入信号 输出响应
自动控制原理第三章
A=1,称单位斜坡函数,记为 t· 1(t)
f(t)
1 L[t 1( t )] 2 s
0 t
考查系统对匀速信号的跟踪能力
3. 抛物线函数(等加速度函数)
1 2 At t0 r (t ) 2 t0 0
f(t)
A=1,称单位抛物线函数,记为
1 2 t 1( t ) 2
线性定常系统的重要性质
1.当系统输入信号为原来输入信号的导数时,这时系 统的输出则为原来输出的导数。 C ( s) GB ( s) R( s) dr( t ) C1 ( s ) GB ( s ) L[ ] G B ( s ) sR( s ) sC ( s ) dt dc( t ) c1 (t ) dt 2. 在零初始条件下,当系统输入信号为原来输入信号 时间的积分时,系统的输出则为原来输出对时间的积分, 积分常数由零初始条件决定。 R( s ) 1 C 2 ( s ) GB ( s ) L[ r ( t )dt] GB ( s ) C ( s) s s y2 ( t ) y( t )dt
单位脉冲响应 [R(s)=1] h(t) 1 1/T C ( s) Ts 1 它恰是系统的闭环传函,这 0.368/T 时输出称为脉冲(冲激)响应 0.135/T 0.05/T 函数,以h(t)标志。 t 1 T 0 T 2T 3T h( t ) C脉冲 ( t ) e T 3.2.3
二阶系统有两个结构参数ξ (阻尼比)和n(无阻尼振荡频 率) 。二阶系统的性能分析和描述,都是用这两个参数表示的。
例如: RLC电路 R
L
r ( t)
C
c(t)
微分方程式为: d 2 c( t ) dc( t ) LC RC c( t ) r ( t ) 2 dt dt 2 n C ( s) 1 Φ( s ) 2 零初条件 2 2 2 R( s ) T s 2Ts 1 s 2n s n
自动控制原理 第三章

−
1 t T1
1 + e T1 / T2 − 1
−
, (t ≥ 0) (3 − 22)
36
过阻尼系统分析
衰减项的幂指数的绝对值一个大,一个小。 衰减项的幂指数的绝对值一个大,一个小。绝对 值大的离虚轴远,衰减速度快, 值大的离虚轴远,衰减速度快,绝对值小的离虚 轴近, 轴近,衰减速度慢 衰减项前的系数一个大, 衰减项前的系数一个大,一个小 二阶过阻尼系统的动态响应呈非周期性, 二阶过阻尼系统的动态响应呈非周期性,没有振 荡和超调, 荡和超调,但又不同于一阶系统 离虚轴近的极点所决定的分量对响应产生的影响 大,离虚轴远的极点所决定的分量对响应产生的 影响小,有时甚至可以忽略不计。 影响小,有时甚至可以忽略不计。
1 R( s ) = s
输出: 输出:
1 1 C ( s) = Φ( s) R( s) = ⋅ Ts + 1 s
C (t ) = 1 − e
− t T
21
单位阶跃响应曲线
t
初始斜率: dh(t ) |t =0 = 1 dt T
22
性能指标
1. 平稳性σ%: 非周期、无振荡, 非周期、无振荡, σ% =0 2. 快速性ts:
此时s1, s2为 此时 一对实部为 正的共轭复 根,位于复 平面的右半 部。
34
2
⑥特征根分析—— ζ <−1 (负阻尼)
s1,2 = −ζω n ± ω n ζ 2 − 1
此时s1,s2为 此时 两个正实根, 两个正实根, 且位于复平 面的正实轴 上。
35
二阶系统单位阶跃响应
1.过阻尼(ζ > 1) 二阶系统的单位阶跃响应 过阻尼
1 t
②单位斜坡函数 其数学表达式为: 其数学表达式为: t f ( t ) = t . 1( t ) = 0 其拉氏变换为: 其拉氏变换为:
自动控制原理胡寿松 第3章
r(t)
c(t)
实际
1
2 1
理想的
1
调节过程
0
t
0
t
整个调节过程分为两个阶段: 动态过程 输出量激烈变化,用动态性能描述 稳态过程 输出量稳定在新的平衡状态,用稳态性能描述
c(t ) c()
0
动态过程
稳态过程
t
三、动态性能指标 注意tr的另一种定义。
• 描述稳定的系统在单位阶跃函数作用下,动态过程 随时间的变化状况的指标。
2、斜坡函数Ramp
At t 0
r(t)
0
t0
当A=1时,称为单位斜坡函数,其拉氏 变换为:
R(s)
L(t)
1 s2
如果控制系统的输入量是随时间逐步变化的函数,则斜坡 时间函数是比较合适的,它等于单位阶跃函数对时间的积分。
3、抛物线函数
r(t)
1 2
At2
t0
0 t 0
当A=1时,称为单位抛物线函数, 其拉氏变换为:
R(s)=1 c(s) (s) 1 Ts 1
c(t ) 1 T
0.368 1 T
0
g (t )
c(t)
L1[(s)]
1
t
eT
(t
0)
T
1 斜率T 2
c(t)
1
t
eT
T
T 2T 3T
t
T越小, 惯性越小, 响应越快
单位脉冲响应
• 在零初始条件下,当系统的输入信号是单位冲激函数(t)时, 系统的输出信号称为系统的单位脉冲响应(单位冲激响应)。
输出起点 的斜率为
1/T
T : 惯性时间常数
令期望输出等于输入 量,则误差为:
自动控制原理第三章
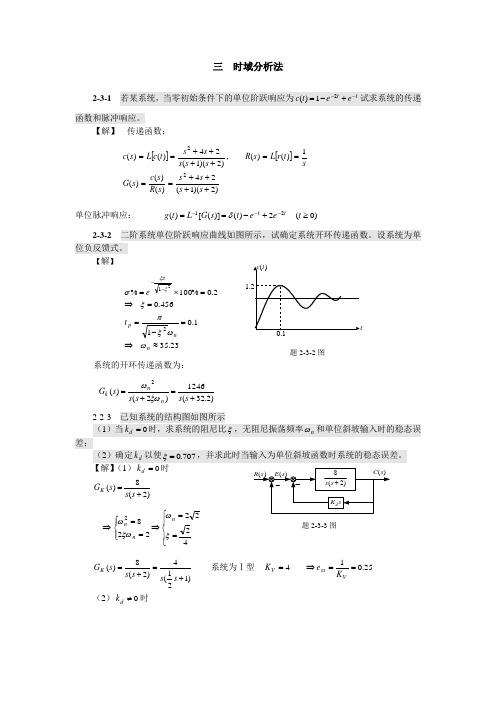
三 时域分析法2-3-1 若某系统,当零初始条件下的单位阶跃响应为t t e e t c --+-=21)(试求系统的传递函数和脉冲响应。
【解】 传递函数:[][])2)(1(24)()()(1)()(,)2)(1(24)()(22++++====++++==s s s s s R s c s G st r L s R s s s s s t c L s c单位脉冲响应: )0(2)()]([)(21≥+-==---t e e t s G L t g tt δ2-3-2 二阶系统单位阶跃响应曲线如图所示,试确定系统开环传递函数。
设系统为单位负反馈式。
【解】 23.351.01456.02.0%100%212≈⇒=-==⇒=⨯=--n n p t e ωωξπξσξξπ系统的开环传递函数为:)2.32(1246)2()(2+=+=s s s s s G n n k ξωω2-2-3 已知系统的结构图如图所示(1)当0=d k 时,求系统的阻尼比ξ,无阻尼振荡频率n ω和单位斜坡输入时的稳态误差;(2)确定d k 以使707.0=ξ,并求此时当输入为单位斜坡函数时系统的稳态误差。
【解】(1)0=d k 时 )2(8)(+=s s s G K⎪⎩⎪⎨⎧==⇒⎪⎩⎪⎨⎧==⇒42222282ξωξωωn n n )121(4)2(8)(+=+=s s s s s G K 系统为Ⅰ型 25.014==⇒=Vss V K e K (2)0≠d k 时题2-3-2图.1⎪⎩⎪⎨⎧===⇒⎪⎩⎪⎨⎧=+==⇒++=+++=4183.222707.0)41(228)]41(2[8)2(81)2(8)(2d n d n n d d K k k k s s s k s s s G ωξξωω ,1)125.0(2)4(8)(=⇒+=+=v s s s s s G K Ⅰ型系统,5.01,2==⇒=Vss V K e K3-4温,发现需30s 时间指出实际水温的95%的数值。
自动控制原理第3章
1
1 2
2
( 1
e
(
2
1 ) n t
2
e
(
2
1 ) n t
1
)
2
t 0
1
Matlab仿真结果
(过阻尼二阶系统的单位阶跃响应)
Step Response
n 5
1 0.9 0.8
选择
1 .2
2
5
Amplitude
n 5
Step Response 2 1.8
选择
Amplitude
1.6 1.4
0 .7
0 .5
1.2 1 0.8 0.6 0.4
0 .2
0
0.2 0
0
0.5
1
1.5
2
2.5 Time (sec)
3
3.5
4
4.5
5
结论:在欠阻尼状态,阻尼比越小,系统振荡越剧烈。
3.3 二阶系统的阶跃响应
⑤当
0
时,为负阻尼状态
特征根 特征根
s 1 , 2 j n 1
2
1 0
n
(实部为正的 共轭复根) (实部为正的 不相等实根)
1
s 1 , 2
n
n
2
1
当阻尼比为负阻尼时,特征根实部为正,即闭环极点 分布在s右半平面,系统阶跃响应曲线呈现发散形式。
n t 由于在 t 期间,e 0 ,为满足上式,只能 使 sin d t 0 ,由此得
d t n
自动控制原理第三章

K S v2 (3 70)
(3 69)
K a 静态加速度误差系数
Static acceleration error constant
(3-70)
0 K a = K ∞
ν = 0,1 ν =2 ν ≥3
控制 对象
C(s) (s) G2 (s)
N (s) R(s) E(s) (s) G1 (s) H (s)
控制器
N (s) R(s) E(s) G1(ss) () H (s)
G2 (s)
C(s) G2 (s) (s)
输出对扰动 的传递函数
N(s) C(s)
图3-23 控制系统
G1 (s)
H (s)
G2 ( s ) C (s) = M N (s) = N ( s ) 1 + G1 ( s )G2 ( s ) H ( s )
!
系统类型(type)与系统的阶数(order)的区别
令
G0 ( s ) H 0 ( s ) = Π (Ts S + 1) Π (T j S + 1)
i =1 j =1
m
n ν
G ( s) H ( s) =
K Π (τ i s + 1) sν
m
Π (T j s + 1) j =1
i =1 n ν
, n≥m
s →0
令
K p = lim H ( s ) R ( s )
s →0
(3 66)
K p : 静态位置误差系数
Static position error constant
由式(3 63)知:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
典型信号
单位阶跃
0, x(t ) 1, 0, x(t ) t, 0, x(t ) 1 2 2 t ,
t0 t0 t0 t0 t0 t0
1 Lx(t ) S 1 Lx(t ) 2 S 1 Lx(t ) 3 S
单位斜坡
单位加速度
3.1 引言
这一章就是讨论并给出分析系统稳定性,静 态误差和动态特性的一些时域的(工程上常用的) 分析方法。 *
3.2 稳定性
3.2.1运动(微分方程的解)的稳定性 第2章 例2.8(P.23,式2.2.42)
Ka=20
Ka=200
结论
(1)线性系统运动的稳定性: 线性系统,对所有初值其运动都是稳定的或都是 不稳定的。 非线性系统,对—部分初值其运动是稳定的,对另 一部分初值其运动有可能不稳定。 (2)系统结构、参数的变化对系统运动稳定性有 影响。 *
a 4 ,1
2 20 Tf2 20 Tf Tm Tm
20 K
3
Tm
( 20 Tf Tm )2 400 K
2
Tm
2
a 5 ,1 a 2 ,1 a 4 ,1
结论
(1)增大系统中 的开环比例系 数不利稳定 (2)增大系统中 的时间常数不 利稳定 (3)系统中时间 常数的数目增 多不利稳定
1 G( s) F ( s) e( s) X ( s) P( s ) 1 G0 ( s) 1 G0 ( s) 1 G( s) F ( s) ess lim s( X ( s) P( s)) s 0 1 G0 ( s) 1 G0 ( s)
3.6.2 关于输入量的静态误差
3.2.3线性系统稳定的充分必要条件
线性系统稳定<=>其微分方程的特征根全部在复 平面的左半面(若虚轴上有根,右
半面无根称系统临界稳定)。 3.2.4 稳定的(李亚普诺夫)定义
一、经典定义
二、李亚普诺夫稳定性定义的几何解释
说明
(1)大范围稳定
(2)渐近稳定
一、经典定义
如果一个关于X的微分方程组,在初始条件 X(to)=Xo下有解X(t),且对于任意给定的正数>0, 总存在一个正数(),当初始条件Xo变为Xo时,只 要 Xo—Xo ,其相应解X(t)在t>to的任何 时刻都满足X(t)-X(t)<,则称解X(t)是稳定 的.如果不存在这样的正数 ,则称解X(t)是不稳 定的。*
K Kp lim G0 ( s ) lim , s 0 s 0 S K Kv lim SG0 ( s ) lim 1 , s 0 s 0 S K 2 Ka lim S G0 ( s ) lim 2 s 0 s 0 S
静态位置误差 ess
Kp 1 1 1 Kp
例1
2S 6 5S 5 3S 4 4S 3 6S 2 14S 7 0
上述方程全部根都在左半复平面的充分 必要条件是Routh表的第一列全部是正 数。 方程右半复平面根的个数等于 Routh表第—列各元改变符号的次数。
二、特殊情况
(1)第一列中出现“0” 处理方法, 用一个小的正数代替它。 判断, 其上面一行首列和下面一行首列符号相同,则 有一对纯虚根。 上面一行首列和下面一行首列符号相反,则认 为有一次变号。 (2) Routh表的某一行所有元为“0” 处理方法,构造一个辅助多项式P(S)求导代替全“0” 行,继续运算。
判断, 有一些大小相等关于原点对称的根, P(S)=0。 变号一次表示有一个正实根。
三、将Routh表判据应用一、二、三阶微分方程的特 征方程 结论(1)一阶和二阶系统稳定的充要条件是特征方程 所有系数均为正(同号)。
(2)三阶系统稳定的充要条件是a1· 2>a0 · 3 a a
(3)如果系统稳定,其微分方程的特征方程的所有 系数必须同号。这是系统稳定的必要条件。
二、系统静态误差ess(t)定义为系统误差的终值
ess (t ) lim e(t ), 若ess (t ) 常数 , 则ess (t ) ess
t
ess(t)是衡量系统最终控制精度的重要性能指标。 三、静态误差计算
ess lim e(t ) lim se( s )
t s 0
K ( S 1) S ( 3 S 1)( 6 S 1)
;
K在什么范围取值能保证 闭环稳定?
3.5.2双参数的稳定域
方法, 利用代数法则确定双参数的稳定域
例,已知单位反馈的开 环传函G0
闭环特征方程式: 2S 3 3S 2 (1 K )S K 0 要求a 2 a1 a 0 a 3 , (1 K ) ) 3(1 K ) 2 K ,
3.4 参数对稳定性的影响
Tf Ta TmS ( Tf Ta )TmS ( Tf Tm )S SK0
4 3 2 Tf TaTmS4 ( Tf Ta )TmS3 ( Tf Tm )S2 S K 10 K K K
2 Tf Tm ( 20 Tf Tm )Tm a 1 ,1 20 K a 2 ,1 20 K 2 20 Tf2 20 Tf Tm Tm a 3 ,1 Tm 2 20 K
(6)典型信号(单位阶跃,单位斜坡,单位加速度) (7)系统静差=输入引起的静差+扰动引起的静差
3.6.1静态误差的定义
一、系统误差e(t)的定义
e(t)反映系统跟踪输入和抑制扰动过程的精度。
(1)如果x(t)是输出量y(t)的期望值, e(t)=x(t)-y(t) (2)如果x(t)相当于代表期望值的指令输入,而b(t)相当于被控 量y(t)的测量值,e(t)=x(t)-b(t)
二、李亚普诺夫稳定性定义的几何解释
说明 (1)大范围稳定 (2)渐近稳定
3.2.5 李亚普诺夫第一方法
第一定理: 若线性化后系统特征方程的所有根均为负实数或实 部为负的复数,则原系统的运动不但是稳定的而且是渐 近稳定的。线性化过程中被忽略的高于—阶的项也不会 使运动变成不稳定. 第二定理 : (1)若线性化后系统特征方程的所有根中,只要有—个为 正实数或实部为正的复数,则原系统的运动就是不稳定 的,被忽略的高于—阶的项也不会使运动变成稳定。 (2)若线性化后系统特征方程的所有根中,有一些是实部 为零的而其余均具有负实部则实际系统的稳定与否与被 忽略的高阶项有关。这时必须分析原始的非线性方程。
四、Routh判据可用来判断代数方程位于 复平面上给定垂线S= - 右侧根的数目。
做法 , 令S= Z - ,代入特征方程得到关于Z的方 程,然后应用Routh判据。
3.3.2 Hurwitz判据(自学)
3.4 参数对稳定性的影响
Tf TaTmS4 (Tf Ta )TmS3 (Tf Tm )S2 SK0
3.5参数的稳定域
在保证系统稳定的条件下,系统中各参数的取 值范围。 3.5.1 单参数稳定域 方法, 利用代数法则确定单参数的稳定域
例,已知对象的开环传 G0 函
闭环特征方程式: 18S 3 9 S 2 (1 K )S K 0 要求a 2 a1 a 0 a 3 , 9( K 1) 18K , K 1, K 0 K 0
一、静差系数(分析输入静差与系统传函的关系)
1 当输入x(t ) 1 (t ), X ( s ) S , ess lim 1G10 ( s ) 1 lim1G0 ( s ) s 0
s0
当输入x(t ) t 1 (t ), X ( s )
1 S2
1 , ess lim SG0 ( s ) s 0 1 S3
设G ( S ) H ( S )
Kp 1 1 Kp
静态速度误差系数 lim SG0 ( s); K
s 0
静态加速度误差系数 lim S G0 ( s ); Ka
2 s 0
1 ess Ka
结论:关于输入信号的静态误差就是相应的误差系数的倒数。
二、关于输入量的静差与系统结构和参数的关系
K ( 1S 1)( 2 S 1) ( m S 1) Go ( S ) S (T1S 1)(T2 S 1) (Tn S 1)
K : 开环比例系数 ;
1 S
: 表示开环传函中含 个积分单元 .
由静态误差系数定义知
K , s 0 s 0 S K Kv lim SG0 ( s ) lim 1 , s 0 s 0 S K Ka lim S 2G0 ( s ) lim 2 s 0 s 0 S Kp lim G0 ( s ) lim
1 Kp
; 静态速度误差 ess
1 1 ; 静态加速度误差 ess K Ka
结论
(1)同一典型输入信号作用时,积分单元数目愈多的系 统输入静差愈小。
(2)同一系统输入信号变化愈剧烈输入静差愈大。
ห้องสมุดไป่ตู้
(3)增大开环传函中的K可使输入静差减小。
3.6.3关于扰动的静态误差
e( S ) X ( S )0
G(S ) H ( S ) P( S ) 1 G0 ( S )
G0 ( s) K ( S )G( S ) H ( S )
当p(t ) 1 (t )时,P( S ) ess lim G( S ) H ( S ) s 0 1 G ( S ) 0
1 S
设
K1 ( 11S 1)( 12 S 1) ( 1m S 1) K (S ) S (T11S 1)(T12 S 1) (T1n S 1) K 2 ( 21S 1)( 22 S 1) ( 2 p S 1) S (T21S 1)(T22 S 1) (T2 q S 1)
第三章 线性控制系统的运动