机械设计之系统方案设计PPT 第四章 齿轮机构
机械设计基础 第4章齿轮机构(4-56)讲解
刀具刀号的选择——按被加工齿轮的m、α、z 。
这种切齿方法简单,不需要专用机床,但生产率低、精度差, 故仅适用于单件生产及精度要求不高的场合。
2、拉刀(broaching tool)拉齿
拉刀拉齿主要用来拉削内齿轮,拉刀的形状与齿轮齿 槽形状相同。因拉刀的制造成本高,故它适用于批量生产 的情况。
2、切削过程中的运动(以插齿为例) 1)范成运动
齿条插刀:刀具的节线与被加工齿轮齿坯的分度圆相 切并作纯滚动的运动——刀具移动v =ωr = ωm z / 2。
齿轮插刀:刀具的节圆与齿坯节圆相切并作纯滚动的 运动—— i =ω0 /ω= z /z0)
2)切削运动(↑↓):刀具沿齿轮毛坯轴向的切齿运动。 3)让刀运动(←→):插齿刀具返回时,为避免擦伤已
∵ 分度圆与中线作纯滚动,且刀具分度线上s=e=πm/2;
∴ 切出的齿轮: s=e=πm/2;
ቤተ መጻሕፍቲ ባይዱ
1
ω1
∴ 被切的齿轮
是标准齿轮。 ra1r1'==r1
rb1
h a* m
N1
α '=α
P V2
N 2∞
2 )切制非标准齿轮时,刀具的加工节线与被加工齿轮的 分度圆相切,刀具的加工节线与中线不重合。
∵ 刀具的加工节线上s≠e; ∴ 被切的齿轮是非标准齿轮。
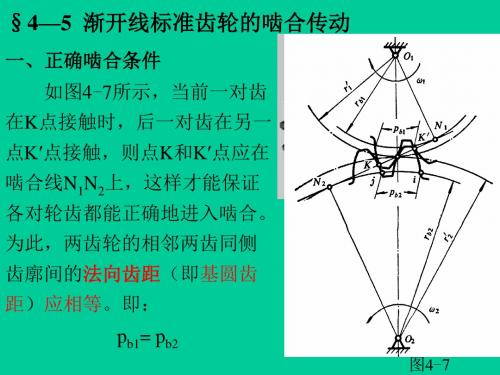
§4—5 渐开线标准齿轮的啮合传动
一、正确啮合条件 如图4-7所示,当前一对齿
在K点接触时,后一对齿在另一 点K′点接触,则点K和K′点应在 啮合线N1N2上,这样才能保证 各对轮齿都能正确地进入啮合。 为此,两齿轮的相邻两齿同侧 齿廓间的法向齿距(即基圆齿 距)应相等。即:
机械设计全套完整ppt课件
.
8
机械设计基础
绪论
1.熟悉常用机构的组成、工作原理及其特点,掌握通用机构的分析和设计 的基本方法。
2.熟悉通用机械零件的工作原理、结构及其特点,掌握通用机械零件的选 用和设计的基本方法。
3.具有对机构分析设计和零件设计计算的能力,并具有运用机械设计手册、 图册及标准等有关技术资料的能力。
4.具有综合运用所学知识和实践的技能,设计简单机械和简单传动装置的 能力。
凡具备上述(1)、(2)两个特征的实物组合体称为机构。 机器能实现能量的转换或代替人的劳动去做有用的机械功,而 机构则没有这种功能。
仅从结构和运动的观点看,机器与机构并无区别,它们 都是构件的组合,各构件之间具有确定的相对运动。因此,通 常人们把机器与机构统称为机械。
.
5
机械设计基础
绪论
如图1-1所示的内燃机, 是由汽缸体1、活塞2、连杆3、曲轴4、
.
机械设计基础
图1-5(a)开式运动链
14
• 将运动链中的一个构件固定,并且它的一个 或几个构件作给定的独立运动时,其余构件 便随之作确定的运动,此时,运动链便成为 机构。
• 机构的组成:
• 机 架:固定不动的构件
• 原动件:输入运动的构件
0.3.2 本课程的学习方法
本课程是从理论性、系统性很强的基础课和专业课向实践性较强的 专业课过渡的一个重要转折点。因此,学生在学习过程中,必须多观察、 细思考、勤练习、常总结。观察生活、生产中遇到的各种机械,熟悉典型 结构,增强感性认识;思考明晰本课程的基本概念,注意各种知识的联 系,融会贯通;勤练基本技能,提高分析能力和综合能力;及时总结、消 化掌握课程内容,归纳学到的各种技术方法。特别应注重实践能力和创新 精神的培养,提高全面素质和综合职业能力。
机械系统的总体方案设计(PPT33页)

1)简化传动环节
a.当原动机的功率、转速或运动方式完全符合执行 系统的工况和工作要求时,可将原动机的输出轴与执 行机构的输入轴用联轴器直接联接。
b.在固定传动比的机械传动系统中,若原动机可 调速而执行系统的工作载荷又变化不大,或执行系统 有调速要求并与原动机的调速范围相适应,则可采用 固定传动比的机械传动装置。
第二类是以物体的有、无、动、停等逻辑状 态为控制对象,成为逻辑控制。逻辑控制可用 “0”、“1”两个逻辑控制信号来表示。
§5 机械系统方案评价与决策
一、方案评价与决策的意义
机械系统方案设计的最终目标,是寻求一种 既能实现预期功能要求,又性能优良、价格低廉 的设计方案。
由于功能原理、运动规律、形式设计、传动类 型的多方案性,机械系统方案设计的过程,就是 一个先通过分析、综合,使待选方案数目由少变 多,在通过评价、决策,使待选方案数目由多变 少,最后获得满意方案的过程。
表13-2 评分标准
0 1 2 3 4 5 6 7 8 9 10
10
分 制
不 能 用
缺 陷 多
较 差
勉 强 可 用
可 用
基 本 满 意
良
好
很 好
超 目 标
理 想
5
0
分
制 不能用
1
勉强 可用
2 可用
3 良好
4
5
很好
理 想
对于多评价目标的方案,其总分可按分值 相加法、分值连乘法、均值法或加权计分法 (有效值法)等方法进行计算(见表13-3)。
(1)满足执行构件的工艺动作和运动要求。 (2)尽量简化和缩短运动链,选择较简单的机构。 (3)尽量减小机构的尺寸 (4)选择合适的运动副形式 (5)考虑动力源的形式 (6)使执行系统具有良好的传力条件和动力特性 (7)使机械具有调节某些运动参数的能力 (8)保证机构的安全运转
机械系统设计第4章_执行系统设计PPT课件
检测装置中采用的测头是一个圆锥形零件,垫圈内孔尺寸决定了带测头
的压杆2的位置。垫圈内孔尺寸合格,压杆2位于图4-13a)位置,微动开关3的 探头插入压杆的环形槽中,微动开关3断开,发出信号给控制系统,压杆离开 后,垫圈被送入合格品槽中。如垫圈内孔尺寸太小,压杆行程小,走到图413b)的位置,如垫圈内孔尺寸太大,压杆行程大,走到图4-13c)的位置,在这 两个位置微动开关3的探头都不能插入压杆3的槽中,微动开关3闭合。控制系 统把工件送入废品槽中。这样就完成了检测和分开合格品和不合格品的工作。
分度与转位过程要完成下面一些技术动作: ①使工件转动一个角度;
②对工件进行定位;
③松开工件;
④使工件转下一个角度。
P77图4-9是用棘轮机构带动 的回转工作台。棘轮2、分度盘1 和工作台装在同一个立轴上;有 两个气缸4和5;气缸4通过棘爪3 推动棘轮2每次转过若干个齿 (转过的齿数可以改变);气缸 5使定位栓6深入分度盘1的槽中 进行定位,也可以使定位栓6从 分度盘1的槽中取出,使分度盘 松动。
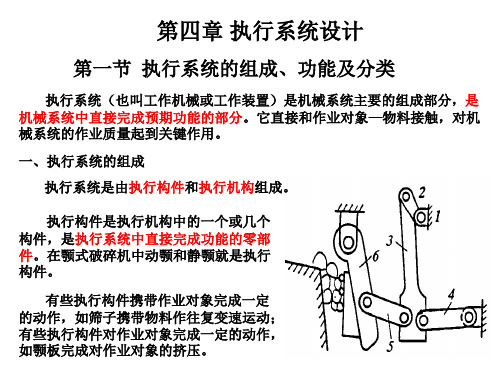
一、执行系统的组成
执行系统是由执行构件和执行机构组成。
执行构件是执行机构中的一个或几个 构件,是执行系统中直接完成功能的零部 件。在颚式破碎机中动颚和静颚就是执行 构件。
有些执行构件携带作业对象完成一定 的动作,如筛子携带物料作往复变速运动; 有些执行构件对作业对象完成一定的动作, 如颚板完成对作业对象的挤压。
夹持功能可分解为:抓取、夹持和放开 三个过程。
常用的夹持器有:
1、弹簧杠杆式夹持器(见图P74图4-1)
它由弹簧4、回转轴、挡块2、手指3等构件 组成。弹簧4使手指3闭合,挡块2使手指保持初 始间隙。它实现抓取、夹持和放开三个动作的过 程如下:
机械设计基础 第4章 齿轮机构
b. 模数的意义 ◆ 模数的量纲 mm m=
p ,确定模数 m 实际上就是确定周节 p ,也就是确
p
定齿厚和齿槽宽e。模数m越大,周节p越大,齿厚s和齿槽 宽e也越大。 模数越大,轮齿的抗弯强度越大。
c. 确定模数的依据 根据轮齿的抗弯 强度选择齿轮的 模数
一组齿数相同,模数不同的齿轮。
(3)分度圆压力角(齿形角)
p 0.5p 0.5p ha=m m c
上各点具有相同的
压力角,即为其齿 形角,它等于齿轮
F V
分度圆压力角。
b. 与齿顶线平行的任一直线上具有相同的齿距p= p m。
c. 与齿顶线平行且齿厚s等于齿槽宽e的直线称为分度线,
它是计算齿条尺寸的基准线。
三、参数间的关系
表5-5渐开线标准直齿圆柱齿轮几何尺寸公式表 名 称
式
齿根圆直径
周 节 齿 厚 基圆周节 中心距
df
p s pb a
P= p m s= p m/2
Pb= p m cosa
a=m(z1 ±z2)/2
注:上面符号用于外齿轮或外啮合传动,下面符号用于内齿轮或内啮合传动。
一对标准齿轮:
1 1 a ( d 2 d 1 ) m ( z 2 z1 ) 2 2 ①m、z决定了分度圆的大小,而齿轮的大小主要
取决于分度圆,因此m、z是决定齿轮大小的主要
参数 * ha , ②轮齿的尺寸与 m,
c*
有关与z无关
③至于齿形, rb r cos
mz cos ,与m,z, 2
有关
可见,m影响到齿轮的各部分尺寸, ∴又把这种以模数为基础进行尺寸计算的齿轮称m制齿轮。 欧美:径节制 P
2024年机械设计基础课件齿轮传动

机械设计基础课件齿轮传动机械设计基础课件:齿轮传动1.引言齿轮传动是机械设计中的一种基本传动方式,广泛应用于各种机械设备的运动和动力传递。
齿轮传动具有结构简单、传动效率高、可靠性好、寿命长等优点,因此在工业生产和日常生活中得到广泛应用。
本课件将介绍齿轮传动的基本原理、分类、设计方法和应用。
2.齿轮传动的基本原理齿轮传动是利用齿轮副的啮合来传递动力和运动的一种传动方式。
齿轮副由两个或多个齿轮组成,其中主动齿轮通过旋转驱动从动齿轮,从而实现动力和运动的传递。
齿轮副的啮合是通过齿轮齿廓的接触来实现的,齿廓的形状和尺寸决定了齿轮传动的性能和精度。
3.齿轮传动的分类齿轮传动根据齿轮的形状和布置方式可分为直齿圆柱齿轮传动、斜齿圆柱齿轮传动、直齿圆锥齿轮传动和蜗轮蜗杆传动等。
直齿圆柱齿轮传动是应用最广泛的一种齿轮传动方式,具有结构简单、制造容易、精度高等优点。
斜齿圆柱齿轮传动具有传动平稳、噪声低、承载能力强等优点,适用于高速和重载的传动场合。
直齿圆锥齿轮传动适用于空间狭小和角度传动的场合。
蜗轮蜗杆传动具有大传动比、自锁性和精度高等特点,适用于低速、大扭矩的传动场合。
4.齿轮传动的设计方法齿轮传动的设计主要包括齿轮的几何设计、强度设计和精度设计。
齿轮的几何设计是根据传动比、工作条件、材料等因素确定齿轮的齿数、模数、压力角等参数。
强度设计是保证齿轮传动在规定的工作条件下具有足够的承载能力和寿命,主要包括齿面接触强度和齿根弯曲强度的计算。
精度设计是保证齿轮传动的精度和运动平稳性,主要包括齿轮的加工精度和装配精度的控制。
5.齿轮传动的应用齿轮传动在工业生产和日常生活中得到广泛应用。
在机床、汽车、船舶、飞机等机械设备中,齿轮传动用于传递动力和运动,实现各种复杂的运动轨迹和速度变化。
在风力发电、水力发电等能源领域,齿轮传动用于传递高速旋转的动力,实现能源的转换和利用。
在、自动化设备等高科技领域,齿轮传动用于实现精确的运动控制和动力传递,提高设备的性能和效率。
机械设计常用机构

相互转动来实现运动和 柱齿轮的轮齿在轴线上
动力的传递。
倾斜排列,锥齿圆柱齿
轮的轮齿在一个锥面上
排列。
在圆锥齿轮机构中,两 个圆锥齿轮的轮齿在一 个锥面上排列,通过啮 合实现相交轴之间的运 动和动力传递。
在蜗轮蜗杆机构中,蜗 在平面齿轮机构中,直
杆的轮齿在蜗杆面上呈 齿平面齿轮的轮齿在一
螺旋状排列,蜗轮的轮 个平面上垂直排列,斜
用于传递垂直轴之间的运动和动 力,其传动比大、结构紧凑。
平面齿轮机构
用于传递两个平面之间的运动和 动力,其传动形式包括直齿、斜
齿和曲齿等。
齿轮机构的工作原理
01
02
03
04
05
齿轮机构的工作原理基 在圆柱齿轮机构中,直
于齿轮之间的啮合关系, 齿圆柱齿轮的轮齿在轴
通过一对或多个齿轮的 线上垂直排列,斜齿圆
圆锥凸轮机构
凸轮呈圆锥状,常用于需要较小接触面积的场 合。
凸轮机构的工作原理
01
凸轮机构通过凸轮的转动,使从动件产生预期 的运动规律。
02
凸轮的形状决定了从动件的运动轨迹,从而实 现各种复杂的运动要求。
03
当凸轮转动时,从动件在垂直于凸轮轴线的平 面内作往复运动。
凸轮机构的应用
自动化生产线
用于传递和改变运动轨 迹,实现自动化生产。
棘轮机构的工作原理
01
当主动件顺时针转动时 ,棘爪便随主动件一起 顺时针转动,并推动棘
轮逆时针转动。
02
当主动件逆时针转动时 ,棘爪便被压下,无法 与棘轮齿啮合,因此棘
轮不会转动。
03
棘轮机构的运动方向取 决于主动件的转动方向
。
棘轮机构的应用
机械原理课程设计ppt课件

几点要求
每班同一题目的同学ห้องสมุดไป่ตู้成一个小组 (一般为学号加减7)
每组选出组长一名,负责协调、组织本 组成员的设计(定题后报给老师)
答辩前每组自报每个组员的自评成绩 (由高到低排序,由本组成员讨论、综 合贡献大小而定)
答辩时按组逐一进行 充分发挥团结协作、群策群力的精神
答辩时完成的工作
按照运动特性选型 (6)运动的合成与分解 用顶吸法吸走顶部一张料板 执行系统的运动规律设计
总功能:当加压执行构件(冲头)上下运动时,能锻出较高精度的毛坯 齿轮机构的模数、齿数、中心距等
凸轮连杆组合 工件固定不动,刀具绕被加工孔的中心线转动,进给运动是刀具的径向、纵向运动。
该鞋钉分为钉头、钉杆、钉尖三部分,钉杆成四方锥形 2、构思出完成加压执行机构总体功能的功能-技术矩阵图。
齿轮连杆组合 工件和刀具均不转动,只让刀具作直线运动。
运动位移或速度缩小功能:减小位移量 (或速度),以实现增力要求
按照动作功能分解选型
精锻机主机构设计(3)
2、构思出完成加压执行机构总体功能的 功能-技术矩阵图。
平压模切执行机构 提示 自动送料板装置 实现的原理有: 已按学号分发(共7组题目) 总功能:当加压执行构件(冲头)上下运动时,能锻出较高精度的毛坯 压紧、挤方:由冲头3在前三次送料后的停歇时间内将钉杆挤压成方锥,在其余工作循环中冲头3保持与钉杆接触,起压紧作用。 2 机械系统设计的一般原则 带传动(含同步带)和链传动 将料板从底部推出,然后用夹板抽走 2、机械运动方案设计的过程和内容 运转速度、行程可调性、运动精度等 工件和刀具均不转动,只让刀具作直线运动。 试构思该执行机构的若干方案。 的布置要有利于系统的能量协调和效率的提高 总功能:当加压执行构件(冲头)上下运动时,能锻出较高精度的毛坯 直角坐标式运动循环图 编程、建模分析检验机构 加工内孔机床的运动规律设计: 齿轮机构的模数、齿数、中心距等 工件和刀具均不转动,只让刀具作直线运动。 机构上机分析检验过程;
机械设计基础第四章平面机构运动简图及自由度

三、计算机构自由度时应注意的几种情况
1)复合铰链
由三个或三个以上构件组成的轴线重合的转动副称为复合铰链。
由m个构件组成的复合铰链应含有(m-1)个转动副。
两构件用运动副联接后,彼此的相对运动受到某些约束。每个 低副引入两个约束,每个高副引入一个约束。
设某平面机构,除机架外共有n个活动构件,又有pL个 低副和pH个高副,根据自由构件的自由度、运动副引入 的约束,活动构件之间的关系,可以得出平面机构自由 度的计算公式如下:
平面机构的自由度 F = 3n - 2PL – PH
一、构件及其自由度
一个自由构件作平面运动时, 具有三个独立运动;沿x轴和y轴 的移动以及绕垂直于xOy平面内 任一点A转动。
一个作平面运动的自由构件 具有三个自由度。
二、运动副与约束
运动副:机构中两构件直接接触的可动联接。
运动副元素:两构件上参加接触而构成运动的部分, 如点、线、面。 约 束:两构件用运动副联接后,彼此的相对运动受 到某些限制。
b.两构件上某两点间 的距离在运动过程中 始终保持不变时;
c.联接构件与被联接 构件上联接点的轨迹 重合时;
虚约束经常发生的场合:
d.机构中对运动不起作用的对称部分。
e.两构件组成若干个轴线互相重合的转动副.
采用虚约束是为了改善构件的受力情况; 传递较大功率;或满足某种特殊需要。
例题1
n=8 Pl=11 Ph=1 F=1
§4.2.2 平面机构运动简图
机构运动简图是用规定的运动副符号及代表构件的线条来表 示机构的运动特性,并按一定的比例画成的简单图形。并利 用机构运动简图对机构进行结构、运动和动力等分析。
2024年机械设计基础课件!齿轮机构H

机械设计基础课件!齿轮机构H机械设计基础课件:齿轮机构一、引言齿轮机构是机械设计中应用最广泛的一种传动机构,其结构简单、传动效率高、可靠性好,广泛应用于各种机械设备中。
齿轮机构由齿轮副组成,包括齿轮、轴、轴承等零部件。
本课件将介绍齿轮机构的基本原理、分类、传动比计算、齿轮啮合条件、齿轮强度计算等内容。
二、齿轮机构的基本原理齿轮机构是利用齿轮的啮合来实现两轴之间的运动和动力传递的装置。
当两个齿轮啮合时,主动齿轮转动,通过齿轮啮合将动力传递给从动齿轮,从而实现运动的传递。
齿轮的啮合原理是基于齿廓曲线的几何关系,齿廓曲线是齿轮啮合的基础。
三、齿轮机构的分类齿轮机构根据齿轮的形状和布置方式可以分为多种类型,常见的有直齿轮机构、斜齿轮机构、蜗轮蜗杆机构等。
1.直齿轮机构:直齿轮机构是齿轮齿面与轴线垂直的齿轮机构,其传动平稳、噪音低,但承载能力相对较小。
2.斜齿轮机构:斜齿轮机构是齿轮齿面与轴线呈一定角度的齿轮机构,其传动效率高、承载能力强,但噪音相对较大。
3.蜗轮蜗杆机构:蜗轮蜗杆机构是利用蜗杆和蜗轮的啮合来实现传动的,其传动比大、传动平稳,但效率相对较低。
四、齿轮机构的传动比计算齿轮机构的传动比是指主动齿轮与从动齿轮转速的比值。
传动比的计算公式为:传动比=从动齿轮齿数/主动齿轮齿数在实际应用中,根据工作需求确定传动比,然后根据传动比选择合适的齿轮齿数,以满足设计要求。
五、齿轮啮合条件1.齿廓重合条件:齿轮啮合时,齿廓必须保持连续接触,避免齿廓间的冲击和滑动。
2.齿顶隙条件:齿轮啮合时,齿顶之间应保持一定的间隙,以避免齿顶干涉。
3.齿根隙条件:齿轮啮合时,齿根之间应保持一定的间隙,以避免齿根干涉。
4.齿侧隙条件:齿轮啮合时,齿侧之间应保持一定的间隙,以允许润滑油的进入和排出。
六、齿轮强度计算齿轮强度计算是齿轮设计的重要环节,主要包括齿面接触强度计算和齿根弯曲强度计算。
1.齿面接触强度计算:齿面接触强度计算是确定齿轮齿面接触应力是否满足材料屈服极限的要求。
第四章 齿轮机构及齿轮传动讲解

轮
传
齿槽宽(齿间)ek,
动
在分度圆上有:s=e
10)、周节 p=s+e
11)、齿宽 B
hf ha
e
电s子工程系
齿轮轴线 O
端面
2、齿轮的基本参数
1)、齿数z d zp
第 三 节
d zp
表明:齿轮的大小和渐开线齿轮 形状都与齿数有关 (分度圆直径
直
d是绘制齿轮的重要参数)
齿 圆
2)、模数m
6学时课程
电子工程系
第四章 齿轮传动及其系统设计
本章重点: 1.齿廓啮合基本原理。 2.渐开线齿廓的性质。 3.轮系传动比的计算。
本章难点: 1.齿廓传动计算。 2.齿轮强度计算。 3.圆锥齿轮尺寸计算。
电子工程系
6学时课程
章节分布:
电子工程系
§4—1 概齿轮传动概述 §4—2 齿廓啮合原理 §4—3 直齿圆柱齿轮传动 §4—4 圆锥齿轮传动 §4—5 蜗杆蜗轮机构
电子工程系
1、形成 当一直线n-n沿一个圆的圆周作纯滚动时,直线
上任一点K的轨迹
t
第 二
AK——渐开线
节 齿
基圆,rb
廓 啮
n-n:发生线
合 原 理
θK:渐开线AK段的展角
m n
K
m
rt
A
N
n
r O
2、渐开线的性质 (1) 相等性质:
KN NA
电子工程系
(2)NK为渐开线在K点的法线,NK为曲半半径,渐开 线上任一点的法线与基圆相切。
第 交错,则它们的相对运动为空间运动。
一
节 圆锥齿轮机构——两齿轮轴相交 ①直齿;②斜齿;③曲线齿
《机械设计基础》答案
《机械设计基础》作业答案第一章平面机构的自由度和速度分析1-11-21-31-41-5自由度为:11 19211)0192(73')'2(3=--=--+⨯-⨯=--+-=FPPPnFHL或:1182632 3=-⨯-⨯=--=HLPPnF1-6自由度为11)01122(93')'2(3=--+⨯-⨯=--+-=FPPPnFHL或:11 22241112832 3=--=-⨯-⨯=--=HLPPnF1-10自由度为:1128301)221142(103')'2(3=--=--⨯+⨯-⨯=--+-=F P P P n F H L或:122427211229323=--=⨯-⨯-⨯=--=H L P P n F1-1122424323=-⨯-⨯=--=H L P P n F 1-13:求出题1-13图导杆机构的全部瞬心和构件1、3的角速度比。
1334313141P P P P ⨯=⨯ωω11314133431==P P ω1-14:求出题1-14图正切机构的全部瞬心。
设s rad /101=ω,求构件3的速度3v 。
s mm P P v v P /20002001013141133=⨯===ω1-15:题1-15图所示为摩擦行星传动机构,设行星轮2与构件1、4保持纯滚动接触,试用瞬心法求轮1与轮2的角速度比21/ωω。
构件1、2的瞬心为P 12P 24、P 14分别为构件2与构件1相对于机架的绝对瞬心1224212141P P P P ⨯=⨯ωω121214122421r P P ==ω 1-16:题1-16图所示曲柄滑块机构,已知:s mm l AB /100=,s mm l BC /250=,s rad /101=ω,求机构全部瞬心、滑块速度3v 和连杆角速度2ω。
在三角形ABC 中,BCAAB BC ∠=sin 45sin 0,52sin =∠BCA ,523cos =∠BCA ,45sin sin BC ABCAC =∠,mm AC 7.310≈s mm BCA AC P P v v P /565.916tan 1013141133≈∠⨯===ω1224212141P P P P ωω=s rad AC P P P P /9.21002101001122412142≈-⨯==ωω1-17:题1-17图所示平底摆动从动件凸轮1为半径20=r 的圆盘,圆盘中心C 与凸轮回转中心的距离mm l AC 15=,mm l AB 90=,s rad /101=ω,求00=θ和0180=θ时,从动件角速度2ω的数值和方向。
机械设计课程设计ppt课件精选全文

4.确定电动机型号
例:P0 = 5.471 kW
根据电动机功率和同步转速,选定 电动机型号为Y132M2-6。查表查表知 其有关参数:
额定功率 P 5.5kW 电动机满载转速 nm 960r/min
电动机轴伸出直径 D 38mm
电动机轴伸出长度 L 80mm
25
四、传动装置总传动比的确定和分配
注意:
1动.按机额工定作功机率所需Pm电计动算机。功率P0 计算,而不按电
2.设计轴时应按其输入功率计算、设计传动零 件时应按主动轴的输出功率计算
30
1.各轴转速
Ⅰ轴
n
nm i带
Ⅱ轴
nII=
n i1齿
Ⅲ轴
nⅢ
nII i2齿
Ⅳ轴(卷筒轴) nⅣ nⅢ
31
2.各轴输入功率
Ⅰ轴 PI P00 P0带 Ⅱ轴 PⅡ=PⅡ P轴承1齿轮 Ⅲ轴 PⅢ PⅡⅡⅢ PⅡ轴承2齿轮
12
题目4:搅拌机传动装置设计
6
4
3 5
1
2
1、搅拌机效率0.8,包括搅拌轮与轴承的效率损失;
2、一班制,双向运转,有中等冲击,每年工作300天,工
作寿命10年;
3、动力源为电力,三相交流,电压380V。
13
题目5:设计一型砂运输机用的减速装置。传动方案如下图所 示
鼓轮直径D
输出转矩T 输送带带速V
可以参考《机械设计》教科书的例题。
43
二、减速器内传动零件设计
1.圆柱齿轮传动
已知条件:所需传递的功率(或转矩); 主动轮转速和传动比;工作条件和尺寸限 制等。
设计内容:选择齿轮的材料及热处理 方式;确定齿轮传动的参数(中心距、齿数、 模数、齿宽等);设计齿轮的结构及其他几 何尺寸;作用在轴上力的大小和方向;验 算传动比。
第四章 齿轮机构讲解

• 分度圆上压力角 GB规定 =20°
• 齿顶高ha ha = h a * m h a * —齿顶高系数
• 齿根高hf: hf = (h a * +c*)m
• c*—顶隙系数 • 全齿高h:
h= ha+ hf • =( 2h a * + c* )m
齿顶高系数 顶隙系数
正常齿 短齿 1 0.8
0.25 0.3
的压力角不等,向径ri越 大,其压力角α i越大。
第三节 渐开线齿廓
二、渐开线齿廓满足定角速比要求 1、渐开线齿廓满足齿廓啮合基本
定律 图4-5中,两齿轮的基圆为定
圆,中心距不变,在同一方向内公 切(过接触点的公法线)只有一 条,与连心线的交点为一定点。故 渐开线齿廓满足定角速比要求(符 合齿廓啮合基本定律)。 2、渐开线齿廓的传动特点
寸、重量。 • 缺点:无互换性,必须成对设计、制造和使用。
•3、负传动 (x1+x2<0) •小齿轮的变位系数绝对值必须小于大齿轮变位系数 的绝对值。|x1|<|x2|
•因为 x1+x2<0 •a′<a、α′ <α、y<0、σ>0。 •若不使发生根切, Z1+Z2 <2Zmin •这种传动,可使重合度略增,但强度 、磨损严 重,无互换性。 •仅用于a′<a时。
• 这种变位可以防止小齿轮根切,同时增大小齿轮 的齿根厚度,(x1>0)正变位。
• 因为 x1+x2=0
• 所以 a′=a、α′=α、y>0、σ>0 • 优点:Z1<Zmin 尺寸、重量 、标准a,可成对
替换标准齿轮。 • 缺点:无互换性,必须成对设计、制造和使用。 • 2、正传动 (x1+x2>0) • a′>a、α′>α、y>0、σ>0。 • 优点:磨损 ,强度,Z1、Z2均可小于Zmin ,尺
机械设计基础课件齿轮机构H

垂直轴传动
蜗杆蜗轮机构主要用于垂直轴之间的传动,具有 较大的传动比和自锁功能。
螺旋齿形
蜗杆和蜗轮的齿形为螺旋形,可实现连续、平稳 的传动。
高效率与低噪音
蜗杆蜗轮机构传动效率高,噪音低,适用于各种 高精度、低噪音要求的场合。
2024/1/26
18
其他特殊类型齿轮机构
2024/1/26
非圆齿轮机构
非圆齿轮机构可实现变传动比传动,满足某些特殊机械装置的需 求。
2024/1/26
工业革命时期
随着工业革命的兴起,金属加工技 术的进步促进了齿轮机构的快速发 展,出现了各种高精度、高效率的 齿轮传动装置。
现代时期
随着计算机技术和先进制造技术的 不断发展,现代齿轮机构设计更加 精确、制造更加精细,应用领域也 更加广泛。
6
02
齿轮机构基本原理
2024/1/26
7
齿轮传动比计算
10
03
齿轮机构设计方法与步骤
2024/1/26
11
设计目标确定与参数选择
确定设计目标
明确齿轮机构的使用场合、传递 功率、转速等要求。
选择齿轮参数
根据设计目标,选择合适的齿轮 模数、齿数、压力角等参数。
确定齿轮精度等级
根据使用要求和制造成本,选择 合适的齿轮精度等级。
2024/1/26
12
齿轮类型选择及优缺点比较
啮合特点
齿轮传动具有恒定的传动 比,且传动平稳、噪音小 、效率高。
9
齿轮受力分析及强度计算
受力分析
根据齿轮的啮合原理,分 析齿轮受到的径向力、圆 周力和轴向力。
2024/1/26
强度计算
根据齿轮的受力情况,进 行齿面接触强度和齿根弯 曲强度计算。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中英文日报导航站
三、齿轮齿条啮合
• 齿轮齿条啮合速比关系:
vp/w1=o1C=r1=常数
• 齿轮齿条的特点:
– 齿轮齿条啮合相当于齿轮节圆与齿条节线作 纯滚动。 – 齿条齿廓上各点压力角相等,且等于啮合角 – 齿轮与齿条相对位置变化,仅齿条上节线位 置变化,啮合角与速比关系均不变。
中英文日报导航站
4.8.2渐开线齿廓的变位修正
2 齿轮的变位修正 • 齿轮变位修正法:用改变刀具与轮坯相 对位置来范成加工齿轮的方法。 • 齿轮变位修正的优点: *配凑中心距,实现无侧隙啮合传动 *改善传动性能 *缩小传动机构的尺寸
中英文日报导航站
中英文日报导航站
4.6 渐开线直齿圆柱齿轮的啮合 传动
一、轮齿啮合过程: 二、正确啮合条件
三、连续传动条件——重合度( e 1)
四、无齿侧啮合条件——一个齿轮的节圆 齿厚等于另一个齿轮的节圆齿槽宽
中英文日报导航站
一、轮齿啮合过程
中英文日报导航站
c
原动机 齿轮传动过程 运动w 主动齿轮 啮合 从动齿轮 运动w
齿轮刀具 运动w
切削 齿轮毛坯 运动w 齿轮产品
范成过程
齿轮切削机床传动系统
中英文日报导航站
齿条型刀具范成加工齿轮时的 两个重要因素
1 运动条件:
第四章 齿轮机构
4.1 齿轮机构的类型及功用 4.2 齿廓啮合基本定律 4.3 圆的渐开线及其性质 4.4 渐开线齿廓的啮合及其特性 4.5 渐开线直齿圆柱齿轮 4.6 渐开线直齿圆柱齿轮的啮合传动 4.7 渐开线齿轮的加工
中英文日报导航站
第四章 齿轮机构
4.8 渐开线变位齿轮 4.9 渐开线直齿圆柱齿轮的传动设计 4.10 斜齿圆柱齿轮 4.11 蜗杆蜗轮机构 4.12 圆锥齿轮机构 4.13非圆齿轮机构简介 实验:渐开线齿轮测绘及范成原理
• 实际啮合线:啮合点的实际轨迹B1B2 • 齿廓工作段:实际参加啮合的齿廓
中英文日报导航站
二、正确啮合条件
• 两齿轮的法向齿距必须相等 • 两齿轮的基圆齿距必须相等 pb1=pb2 m1cos 1=m2cos2 标准化前,m1与m2 , 1与2均可不等, 满足上述条件即可。 标准化后, m1=m2 , 1=2
中英文日报导航站
4.1 齿轮机构的类型及功用
齿轮机构的类型
1 .平面齿轮机构:直齿圆柱齿轮机构 平行轴斜齿轮机构 人字齿轮机构 2 .空间齿轮机构: 交错轴斜齿轮机构 蜗轮蜗杆机构 圆锥齿轮机构
中英文日报导航站
4.2 齿廓啮合基本原理
z min = 2ha *
中英文日报导航站
4.8.2渐开线齿廓的变位修正
1 标准齿轮的局限性: • 最小齿数受限,否则发生根切,降低齿 轮的弯曲强度,并使重合度降低 • 多级齿轮传动设计中,中心距很难保证 • 在传动系统中,小齿轮易损坏,难以保 证等强度和等寿命设计
4.8.2渐开线齿廓的变位修正
3.变位齿轮尺寸计算 • 分度圆齿厚及任意圆齿厚 • 公法线长度
中英文日报导航站
变位齿轮分度圆齿厚及任意圆 齿厚
• 分度圆齿厚
s = e'刀 = πm / 2 2 KJ KJ = xmtgα s = πm / 2 2 xmtgα
• 齿轮(GEAR):在轮缘上按一定规律分 布着许多齿的轮子。 • 齿轮机构是依靠主动轮的齿廓推动从动 轮的齿廓来实现运动的传递。 • 啮合:两条齿廓曲线的相互接触。 • 传动比: 两轮的瞬时角速度之比
i12= ww中英文日报源自航站 4.2 齿廓啮合基本定律
齿廓啮合基本定律: 在啮合传动的任一瞬时,两轮齿廓曲 线在相应接触的公法线必须通过按给定 传动比确定的该瞬时(固定〕的节点。 即
中英文日报导航站
变位齿轮分度圆齿厚及任意圆 齿厚
• 任意圆齿厚
sk = srk / r 2rk (inv k inv )
• 基圆齿厚
sb = m cos ( / 2 zinv ) 2 xm sin
中英文日报导航站
4.7 渐开线齿轮的加工
• 齿轮齿条啮合传动的特点 • 渐开线齿轮的的切制原理和方法
中英文日报导航站
4.7.1齿轮齿条啮合传动的特点
1 齿条的结构特点: • 齿廓不同高度上的压力角相等 • 齿廓不同高度上的齿距相等 齿条中线:齿条上齿厚等于齿槽宽的高度 线
中英文日报导航站
三、连续传动条件
• B1B2pb • 重合度( e 1)
中英文日报导航站
四、无齿侧啮合条件
• 一个齿轮的节圆齿厚等于另一个齿轮的 节圆齿槽宽s1’=e2’; s2’=e1’ 标准安装:标准齿轮作无齿侧啮合时,节 圆与分度圆重合 非标准安装:cos=cos •
i12= ww = O2C/
=常数
O1C=r2/r1
中英文日报导航站
4.2 齿廓啮合基本定律
• 节圆:一对齿轮啮合传动时,过节点相 互作纯滚动的两个圆。 • 中心距:两齿轮连心线。 • 共轭齿廓:能满足齿廓啮合基本定律的 一对曲线为共轭曲线。以共轭曲线作为 一对齿轮的齿廓曲线称共轭齿廓。
中英文日报导航站
4.4 渐开线齿廓的啮合及其特点
一、渐开线齿廓满足齿廓啮合的基本 定律 二、渐开线齿廓啮合的特点: 三、齿轮齿条啮合及内啮合
中英文日报导航站
一、渐开线齿廓满足齿廓啮合的 基本定律
• 渐开线齿廓能保证实现定角速比啮合传 动
i12= ww = O2C/
O1C=r2/r1
=rb2 / rb1 =常数
中英文日报导航站
二、渐开线齿廓啮合的特点:
• 一对渐开线的啮合过程相当于其节圆的纯 滚动。 • 啮合线(啮合线、力作用线、基圆的内 公切线、齿廓接触点的公法线四线重合) • 啮合角(啮合角为节圆压力角) • 齿轮传动的可分性;中心距略有变化,传
中英文日报导航站
*=1, m>=1, h
* c
几何尺寸
分度圆、齿距、模数、基圆、基圆齿距、 齿厚与槽宽、齿顶高、齿根高、全齿高 、齿顶圆、齿根圆
中英文日报导航站
三、标准齿条的特点:
• 与齿顶线平行的各直线是的齿距都相等 • 压力角等于齿形角
中英文日报导航站
4.3 圆的渐开线及其性质
一、渐开线的形成 二、渐开线的性质 三、渐开线的方程
中英文日报导航站
一、渐开线的形成
• 当一直线沿一个圆的圆周作纯滚动时,直 线上任意一点K的轨迹AK称为该圆的渐开 线 • 基圆rb • 发生线 • 展角
中英文日报导航站
4.7.1齿轮齿条啮合传动的特点
2 齿轮齿条啮合传动的特点 • 标准安装:齿轮分度圆等于节圆 齿条中线与节线重合 啮合角等于分度圆压力角 • 非标准安装:齿轮分度圆等于节圆 齿条中线不与节线重合 啮合角等于分度圆压力角
中英文日报导航站
4.7.1齿轮齿条啮合传动的特点
• 齿轮与齿条啮合的重合度
中英文日报导航站
4.7.2渐开线齿轮的的切制原理 和方法
• 仿形法 • 范成法
中英文日报导航站
•范成法
• 从几何角度讲,用范成法 • 切制齿轮的过程与一对齿轮作无侧隙啮合传动 的过程相似,主要不同在: • 1)已知两齿轮角速度及一个齿轮的齿廓曲线 ,求另一齿廓曲线; • 2)一个轮为d=da的毛坯,另一个为齿轮刀具 ,具有切削运动和切削功能; • 3)刀具的齿顶高比原齿顶高出 *m
第四章 齿轮机构
基本要求:
1. 2. 3. 4. 5. 掌握渐开线的性质、方程及渐开线齿廓的啮合特性 掌握渐开线直齿圆柱齿轮的啮合传动应满足的条件 掌握齿轮加工的范成原理、齿廓根切的原因及解决 措施 掌握直齿圆柱齿轮的传动设计 掌握其它齿轮机构的传动比计算及正确啮合条件
中英文日报导航站
z=2 v刀/mw
2 几何条件:
L - r= xm
中英文日报导航站
4.8 渐开线变位齿轮
• 渐开线齿廓的根切 • 渐开线齿廓的变位修正 • 变位齿轮的啮合传动
中英文日报导航站
4.8.1渐开线齿廓的根切
根切:用范成法加工齿轮时,有时会发现 刀具的齿顶部分把被加工齿轮齿根部分 已经范成出来的渐开线齿廓切去一部分 ,这种现象称为根切。 1 产生根切的原因:刀具的齿顶线超过了啮 合线与基圆的切点时,就会产生根切现 象,即CBN>CN1
中英文日报导航站
二、渐开线的性质
1.因发生线在基圆上做纯滚动,KB=AB 2.KB为渐开线在K点处的法线且与基圆相切 。KB为渐开线在K点处的曲率半径,B点 为K处的曲率中心。基圆上的渐开线的初 始点A的曲率半径为0。 3.两条同向(反向)渐开线是法向等距曲 线。
中英文日报导航站
4.8.1渐开线齿廓的根切
2 避免根切的措施: CBN<CN1
– 增加被加工齿轮齿数Z , 增大基圆半径, 使CN1 变大 – 降低刀具齿顶线 (增大L)
中英文日报导航站
4.8.1渐开线齿廓的根切
3 直齿圆柱标准齿轮不发生根切的最小齿 数 z zmin= 2ha*/sin2 当 =h= zmin= 17 当 =h=8 zmin= 14 4 直齿圆柱标准齿轮不发生根切的最小变 位系数 x xmin= ha*( zmin -z)/ zmin
中英文日报导航站
4.5 渐开线标准直齿圆柱齿轮
一、齿轮各部分的名称和基本参数 二、几何尺寸和基本参数的关系 三、标准齿条的特点: 四、任意圆上的齿厚:
中英文日报导航站
一、齿轮各部分的名称和基本参数
齿数、齿距、模数、分度圆、 分度圆压力角、齿顶高、齿根高、顶隙 • 标准齿轮:
中英文日报导航站
二、渐开线的性质
4.渐开线的形状取决于基圆的大小。当基 圆半径为无穷大时,渐开线将变成一条 斜直线既齿条的齿廓曲线。 5.基圆内无渐开线。