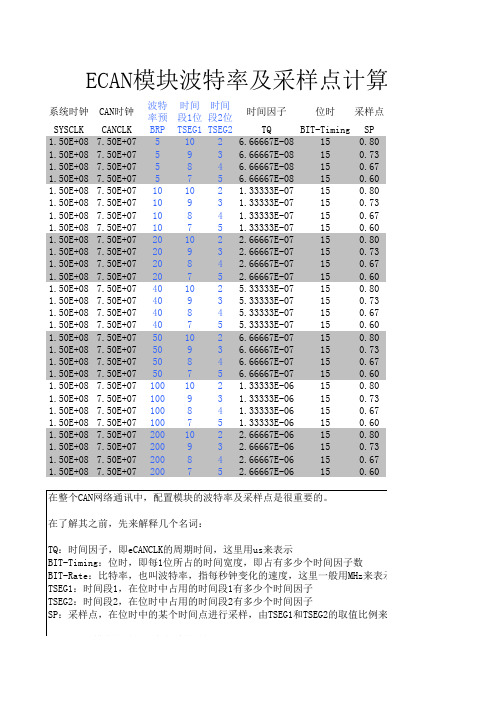
ECAN Tools波特率定义
F28335的ECAN模块波特率及采样点计算
15
0.80
9
3 6.66667E-07
15
0.73
8
4 6.66667E-07
15
0.67
7
5 6.66667E-07
15
0.60
10 2 1.33333E-06
15
0.80
9
3 1.33333E-06
15
0.73
8
4 1.33333E-06
15
0.67
7
5 1.33333E-06
15
0.60
10 2 2.66667E-06
BIT-Rate 1000 1000 1000 1000 500 500 500 500 250 250 250 250 125 125 125 125 100 100 100 100 50 50 50 50 25 25 25 25
BIT-Rate 1.000 1.000 1.000 1.000 0.500 0.500 0.500 0.500 0.250 0.250 0.250 0.250 0.125 0.125 0.125 0.125 0.100 0.100 0.100 0.100 0.050 0.050 0.050 0.050 0.025 0.025 0.025 0.025
波特 率预 BRP
5 5 5 5 10 10 10 10 20 20 20 20 40 40 40 40 50 50 50 50 100 100 100 100 200 200 200 200
时间 时间 段1位 段2位
时间因子
位时 采样点
TSEG1 TSEG2
TQ
BIT-Timing SP
10 2 6.66667E-08
eCAN模块课件讲解

典型的现场总线技术
• 随着嵌入式系统的高速发展,自1980年后十几年间,好几 种现场总线技术走向成熟。 • 基金会现场总线(Foundation Fieldbus) 以美国Fisher-Rosemount公司为首,联合ABB、西门子等 80家公司,一同致力开发的一种国际上统一的现场总线。 • LonWorks(美国Echelon、摩托罗拉、东芝等公司共同倡 导)
Vcan-h和Vcan-l为CAN总线收发器与总线之间的两接口
引脚,信号是以两线之间的“差分”电压形式出现。
CAN总线数据传输格式
CAN总线通信技术的实现
• CAN就是总线型结构的一种适合工业现场自动控制的计算机局域网络。 • CAN总线通讯技术是通过CAN总线控制器在硬件上实现的。CAN总线控制器
CAN为多主方式工作,网络上任一节点均可在任意时刻主动向 网络上其他节点发送信息,而不分主从。 在报文标志符上,CAN的节点分成不同的优先级,可满足不同 的实时要求。 CAN采用非破坏性总线总裁技术。 CAN节点只需通过对报文的标志符滤波即可实现点对点、一点 对多点及全局广播等几种方式传输接收数据。
• 20世纪80年代,Bosch公司的工程人员开始探讨现有的串 行总线系统运用于轿车的可能性,因为还没有一个网络协 议能完全满足汽车工程的要求。 • 1983年,Kiencke开始设计新的串行总线系统,来自 Mercedes-Benz的工程人员介入新总线系统规范的制定。 • 德国Dr.Wolfhard给这个新网络起名为“Controller Area
芯片SJA1000
• SJA1000是一种独立的 CAN控制器,用于一般工 业环境中区域网络控制。
工业级USBCAN分析仪ECAN用户使用手册

ECAN工业级USB-CAN转换器用户手册文档版本:V4.01(2017/01/13)修订历史目录1.功能简介 (4)1.1功能概述 (4)1.2性能特点 (4)1.3典型应用 (4)2.设备安装 (5)2.1与PC连接 (5)2.2CAN总线连接 (5)3.设备使用 (6)3.1USB连接 (6)3.2CAN连接 (6)3.3CAN总线终端电阻 (7)3.4系统状态指示灯 (7)4.技术规格 (9)附录CAN2.0B协议帧格式 (10)1.功能简介1.1功能概述ECAN是集成1路CAN接口的高性能型CAN-bus总线通讯接口卡。
该型号CAN卡可兼容USB2.0总线全速规范,采用ECAN高性能CAN接口卡,PC可以通过USB接口快速连接至CAN-bus网络,构成现场总线实验室、工业控制、智能小区、汽车电子网络等CAN-bus网络领域中数据处理、数据采集的CAN-bus 网络控制节点。
ECAN高性能CAN接口卡是CAN-bus产品开发、CAN-bus数据分析的强大工具;同时具有体积小巧、即插即用等特点,也是便携式系统用户的最佳选择。
ECAN接口卡上自带USB接口,集成CAN接口电气隔离保护模块,使其避免由于瞬间过流/过压而对设备造成损坏,增强系统在恶劣环境中使用的可靠性。
ECAN系列设备可以支持国内外大部分工程机械的ECU下载调试,支持EPEC、IFM(易福门)、TTControl、ZAPI、赛灵卓等品牌的专业控制器,支持CoDeSys及其他专用编程、下载、调试软件。
1.2性能特点●PC接口符合USB2.0全速规范,兼容USB1.1及USB3.0;●集成1路CAN-bus接口,使用DB9接口接线方式;●支持CAN2.0A和CAN2.0B帧格式,符合ISO/DIS11898规范;●CAN-bus通讯波特率在5Kbps~1Mbps之间任意可编程;●使用USB总线电源供电(DC+5V,130mA);●CAN-bus接口采用电气隔离,隔离模块绝缘电压:DC1500V;●最高接收数据流量:8000fps;●CAN端接收报文时间戳精度可达1us;●支持WinXP、Win7、Win10等Windows操作系统;●工作温度范围:-40℃~+85℃;●尺寸:(长)83mm*(宽)49mm*(高)21mm。
ECANTools软件使用说明

ECAN Tools软件使用说明软件安装1、在Windows 系统第一次安装软件:Ⅰ、在产品光盘目录下,找到ECAN Tools文件夹,双击ECanTools-Setup.exe开始安装软件。
Ⅱ、单击下一步继续;Ⅲ、如果同意许可协议点击“同意”继续安装,否则点击“拒绝”退出安装。
Ⅳ、如果要安装到不同的目录,请单击“浏览”按钮,选择好安装目录后,点击确定;Ⅴ、一直点击一步,开始复制文件;Ⅵ、文件复制完成,点击“完成”按钮,退出安装;Ⅶ、文件复制完成后,此时将CAN分析仪用USB 电缆与PC 机正确连接;软件使用ECANTools软件使用手册一、概要1.1 定义说明1.2 快速查找二、概述2.1 概要2.2 客户机服务器概念2.3 控制面板2.4 客户程序2.5 开放的应用程序接口三、安装和启动3.1 安装3.2 系统要求3.3 启动四、软件使用4.1 软件启动4.2 波特率自动识别4.3 数据接收相关功能4.4 数据发送相关功能4.5 总线诊断功能1.1 定义说明CAN:控制器局域网(C ontroller A rea N etwork)。
数据帧:CAN总线的标准数据报文。
一个数据帧包括一个11位或29位的标识符(COBID)和一个0到8字节的数据域。
错误帧:用来指示CAN总线错误的特殊报文。
远程帧:CAN请求报文。
是一种请求数据报文帧而没有数据域的特殊帧。
RTR(R emote T ransmit R equest):CAN数据帧的一位,用来标识报文是数据帧还是远程帧。
跟踪:接收到CAN报文的记录。
触发事件:引起控制面板的状态从后置触发到前置触发的已定义的事件。
1.2 快速查找第2章用CAN分析仪的特点描述它的客户机-服务器概念在本章的最后有一个全部可用功能的列表。
第3章描述安装和启动的信息。
第4章描述控制面板的配置,操作和记录跟踪。
2.1 概要GC-Tech CAN分析仪是一个用监控CAN-bus网络的软件硬件工具,功能通用而且非常强大。
Ecan动态库使用手册5.2
值 0x00000001 0x00000002 0x00000004 0x00000008 0x00000010 0x00000020 0x00000040 0x00000080 0x00000100 0x00000200 0x00000400 0x00000800 0x00001000 0x00002000 0x00004000 0x00008000
沈阳广成科技有限公司
USBCAN Ecan 接口函数库使用手册
目录
1 接口函数库说明及其使用.............................................................................................................1 1.1 接口卡设备类型定义.........................................................................................................1 1.2 错误码定义.........................................................................................................................1 1.3 接口库函数结构体.............................................................................................................2 1.3.1 BOARD_INFO.............................................................................................................2 1.3.2 CAN_OBJ...................................................................................................................3 1.3.3 CAN_STATUS.............................................................................................................4 1.3.4 ERR_INFO.................................................................................................................5 1.3.5 INIT_CONFIG .........................................................................................................6 1.3.6 FILTER_RECORD .....................................................................................................8 1.4 接口库函数说明.................................................................................................................9 1.4.1 OpenDevice.............................................................................................................9 1.4.2 CloseDevice .......................................................................................................10 1.4.3 InitCan ...............................................................................................................11 1.4.4 ReadBoardInfo ...................................................................................................12 1.4.5 ReadErrInfo.........................................................................................................13 1.4.6 ReadCanStatus .................................................................................................17 1.4.7 GetReference .....................................................................................................18 1.4.8 SetReference.......................................................................................................19 1.4.9 GetReceiveNum.....................................................................................................20 1.4.10 ClearBuffer .....................................................................................................21 1.4.11 StartCAN ...........................................................................................................22 1.4.12 Transmit.............................................................................................................23 1.4.13 Receive .............................................................................................................24 1.4.14 ResetCAN ...........................................................................................................25 1.5 接口库函数使用方法.......................................................................................................26 1.5.1 VC 调用动态库的方法..........................................................................................26 1.5.2 VB 调用动态库的方法..........................................................................................26 1.6 接口库函数.......................................................................................................................27
ECAN Tools 软件使用说明

ECAN Tools软件使用说明软件安装1、在Windows 系统第一次安装软件:Ⅰ、在产品光盘目录下,找到ECAN Tools文件夹,点击Setup.exe 安装文件,双击后系统开始安装。
Ⅱ、单击下一步继续;Ⅲ、如果同意许可协议点击“同意”继续安装,否则点击“拒绝”退出安装。
Ⅳ、如果要安装到不同的目录,请单击“浏览”按钮,选择好安装目录后,点击确定;Ⅴ、一直点击一步,开始复制文件;Ⅵ、文件复制完成,点击“完成”按钮,退出安装;Ⅶ、文件复制完成后,此时将CAN分析仪用USB 电缆与PC 机正确连接;软件使用ECANTools软件使用手册目录一、概要- - - - - - - - - - - - - - - - - - - - -1 . 1 定义说明- - -- - - - - - - - - - - - - - - -1 .2 快速查找- - - - - - - - - - - - - - - - - -二、概述- - - - - - - - - - - - - - - - - - - - -2 . 1 概要- - - -- - - - - - - - - - - - - - - - -2 . 2 客户机服务器概念- - - - - - - - - - - - - - -2 .3 控制面板- - - - - - - - - - - - - - - - - - -2 . 4 客户程序- - -- - - - - - - - - - - - - - - - -2 . 5 开放的应用程序接口- - - - - - - -- - - - - - -三、安装和启动- - - - - - - - - - - -- - - - - - - -3 . 1 安装- - - - - - - - - - - - - - - - - - - - - - 3 . 2 系统要求- - - - - - - - - - - - - - - - - - - -3 . 3 启动- - - - - - - - - - - - - - - - - - - - - -四、软件使用- - - - - - - - - - - - - - - - - - - - -4 . 1 软件启动- - - - - - - - - - - - - - - - - - - - - 4 . 2 波特率自动识别 - - - - - - - - - - - - - - - - - 4 . 3 数据接收相关功能- - - - - - - - - - - - - - - - - 4 . 4 数据发送相关功能- - - - - - - - - - - - - - - - - 4 .5 总线诊断功能- - - - - - - - - - - - - - - - - - -1 .1 定义说明CAN:控制器局域网(C ontroller A rea N etwork)。
CANCore 用户手册

CANCore-I/II工业级高性能CAN核心模块用户手册文档版本:V3.01 (2014/10/22)修订历史目录1. 功能简介 (4)1.1 功能概述 (4)1.2 性能特点 (4)1.3 典型应用 (5)2. 设备安装 (6)2.1 设备外形尺寸 (6)2.1 驱动及软件安装 (7)2.2 与PC连接 (7)2.3 CAN总线连接 (8)3. 设备使用 (9)3.1 USB连接 (9)3.2 CAN连接 (9)3.3 CAN总线终端电阻 (10)3.4 系统状态指示灯 (10)4. ECAN Tools软件使用 (11)4.1 软件启动 (11)4.2 数据收发 (12)4.3 总线分析 (12)4.4 其他功能 (13)5. 二次开发 (14)6. 技术规格 (15)7. 常见问题 (16)附录CAN2.0B协议帧格式 (19)1. 功能简介1.1 功能概述CANCore模块是我公司嵌入式模块化系列产品之一。
它是一块尺寸小巧的嵌入式智能CAN模块,用户可以使用此模块,将本不具备CAN通信接口的设备变成一个CAN节点,快速接入CAN总线。
该型号CAN模块集成1或2路CAN接口、16路I/O接口、2路PWM接口、2路A/D接口、1路232接口、1路USB接口。
用户可以很容易的将CANCore 模块集成到自己开发的系统中,并且利用CANCore提供的这些接口,扩展出相当丰富的功能。
目前用户可向我公司购买CANCore蓝牙底板和CANCore测试底板,如图1.1所示。
蓝牙底板可以使CANCore模块具备蓝牙通信能力;测试底板可用于测试CANCore模块是否工作正常。
图1.1 CANCore蓝牙底板和测试底板如果用户使用USB接口连接CANCore模块接入CAN总线,我们会向用户提供ECAN Tools上位机调试软件,该软件可执行CAN-bus报文的收发、保存,CAN-bus监测分析等实用功能。
为满足不同用户的不同需求,CANCore模块支持二次开发,用户可以自行开发软件连接CANCore模块收发处理CAN总线数据,此模块支持定制,支持OEM。
车联网智能后视镜OBD插头线束数据定义及AT指令集
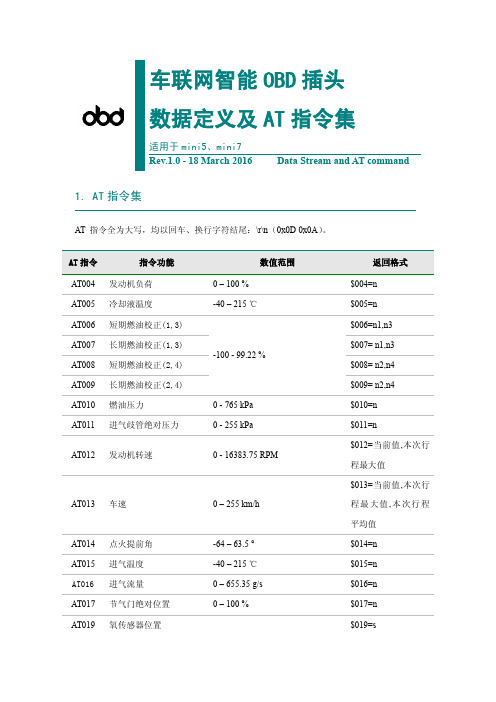
车联网智能OBD插头数据定义及AT指令集适用于mini5、mini7Rev.1.0-18March2016Data Stream and AT command1.AT指令集AT指令全为大写,均以回车、换行字符结尾:\r\n(0x0D0x0A)。
AT指令指令功能数值范围返回格式AT004发动机负荷0–100%$004=nAT005冷却液温度-40–215℃$005=nAT006短期燃油校正(1,3)-100-99.22%$006=n1,n3AT007长期燃油校正(1,3)$007=n1,n3AT008短期燃油校正(2,4)$008=n2,n4AT009长期燃油校正(2,4)$009=n2,n4AT010燃油压力0-765kPa$010=nAT011进气歧管绝对压力0-255kPa$011=nAT012发动机转速0-16383.75RPM$012=当前值,本次行程最大值AT013车速0–255km/h$013=当前值,本次行程最大值,本次行程平均值AT014点火提前角-64–63.5°$014=nAT015进气温度-40–215℃$015=nAT016进气流量0–655.35g/s$016=nAT017节气门绝对位置0–100%$017=nAT019氧传感器位置$019=sAT指令指令功能数值范围返回格式AT031引擎运行时间0–65535sec$031=nAT034相对歧管真空油轨压力0–5177.27kPa$034=nAT036氧传感器B1S1等效比:0–1.999电压:0–7.999V $036=等效比,电压AT037氧传感器B1S2$037=等效比,电压AT038氧传感器B2S1$038=等效比,电压AT039氧传感器B2S2$039=等效比,电压AT040氧传感器B3S1$040=等效比,电压AT041氧传感器B3S2$041=等效比,电压AT042氧传感器B4S1$042=等效比,电压AT043氧传感器B4S2$043=等效比,电压AT044EGR指令开度0–100%$044=nAT046蒸发清除开度0–100%$046=nAT047油箱剩余油量0–100%$047=nAT060三元催化剂温度B1S1-40–6513.5℃$060=nAT061三元催化剂温度B1S2$061=n AT062三元催化剂温度B2S1$062=n AT063三元催化剂温度B2S2$063=n AT084蒸发系统蒸气压力-32767–32768kPa$084=n AT296获取汽车VIN码17位(部分车型支持)$296=s AT297电瓶电压0–max V$297=nAT298瞬时油耗怠速:0–99L/h行驶:0–99L/100km $298=0,n(怠速)$298=1,n(行驶)AT299百公里平均油耗0–99L/100km$299=n AT300里程信息$300=本次里程,累计里程,总里程(km)AT301耗油量信息$301=本次耗油量,累计耗油量(L)AT指令指令功能数值范围返回格式AT302总里程校准发AT302=仪表盘显示里程值,校准总里程初次使用时校准;建议定期校准AT303驾驶时间信息$303=本次怠速时间,本次行驶时间,累计怠速时间,累计行驶时间(本次时间单位s,累计时间单位h)AT304扣减累计里程每发送一次扣减1km 若累计里程大于总里程时,可扣减后完成总里程校准AT400读取故障码$400=故障码数量,故障码详情(竖线分隔如P1001|P1002)建议在怠速状态读取AT401清除故障码清除完成返回$401=OKAT500设备信息$500=汽车协议名称,模块SN号,硬件版本,软件版本AT501清除保存数据清空存储在EEPROM中的数据,恢复到出厂状态AT503返回设置参数当前值$503=AUTO,IMMEDLY,RON$503=MANUAL,DELAY,ROFF$503=随车启动模式,延时连接设置,RT流开闭Table 1.产品AT指令集列表1AT指令指令功能指令说明ATRON打开实时数据流广播执行后,按1HZ频率对外广播(详见11.1)ATROFF关闭实时数据流广播关闭广播ATHBT请求驾驶习惯数据流返回驾驶习惯数据流(详见11.2)ATPIDON进入自定义PID模式(详见11.4)ATPIDOFF退出自定义PID模式ATBUD 设置串口波特率重新上电或复位后生效ATBUD=0:将波特率设为9600ATBUD=1:将波特率设为38400ATBUD=2:将波特率设为115200ATSDRY开启ECU延时连接若本模块影响汽车点火建议打开延时连接ATSDRN关闭ECU延时连接ATVCRY开启随车启动若关闭,则休眠后需手动RST唤醒ATVCRN关闭随车启动ATWST系统热重启保存当前行程数据后,重启模块ATSLEEP进入休眠模块立即进入低功耗休眠状态Table2.产品AT指令集列表22.AT指令补充说明⏹所有AT指令均以\r\n做为结束符;⏹除AT297(电瓶电压),AT500(设备信息),AT501(清除保存数据),AT300(里程信息),AT301(耗油信息),AT302(里程校准),AT303(驾驶时间),AT304(扣减里程),ATBUD(修改串口波特率)外,其余指令仅在ECU连接成功后才有响应;⏹AT指令请求间隔建议大于300ms;⏹AT296(获取汽车VIN码)指令响应时间为1000ms;⏹AT004(发动机负荷)、AT005(水温)、AT011(进气压力)、AT012(转速)、AT013(车速)、AT015(进气温度)、AT016(进气流量)、AT017(节气门开度)、AT297(电瓶电压)请求间隔最短可为100ms;⏹因车辆支持的传感器各不相同,若不支持,返回“ECU not support”。
CAN初始化中波特率相关参数配置V1.70

附件四:CAN初始化中波特率相关参数配置说明书版本:V1.70版本更新日期:2012.09.06SJA1000内部频率基准源F_BASE = F clk/2,即外部晶振频率F clk的2分频。
注意任何应用中,当利用外部晶振作为基准源的时候,都是先经过2分频整形的。
1、位周期的组成波特率(f bit)是指单位时间内所传输的数据位的数量,一般取单位时间为1s。
波特率由通信线上传输的一个数据位周期的长度(T bit)决定,如下式所示:F bit=1/T bit(1)根据Philips公司的独立通信控制器,一个位周期由3个部分组成:同步段(t SYNC_SEG)、相位缓冲段1(t TSEG1)和相位缓冲段2(t TSEG2)。
T bit=t SYNC_SEG+t TSEG1+t TSEG2(2)所有这些时间段,都有一个共同的时间单元——系统时钟周期(T SCL)。
具体到SJA1000,T SCL由总线时序寄存器的值来确定。
SJA1000有2个总线时序寄存器,即总线时序寄存器0(BTR0)和总线时序寄存器1(BTR1)。
这2个寄存器有自己不同的功能定义,共同作用决定总线的通信波特率。
2、总线时序寄存器总线时序寄存器0 定义波特率预设值BRP(共6位,取值区间[1,64]和同步跳转宽度SJW (共2位,取值区间[1,4])的值。
位功能说明如表1所列。
表1:总线时序寄存器0(BTR0)位功能说明CAN的系统时钟周期T SCL,可以由BRP的数值为决定,计算公式如下:T SCL=2×T CLK×BRP=2×T CLK×(32×BRP.5+16×BRP.4+8×BRP.3+4×BRP.2+2×BRP.1+1×BRP.0+1)(3)其中TCLK为参考时间的周期。
T CLK=1/f CLK(4)为了补偿不同总线控制器的时钟振荡器之间的相位偏移,任何总线控制器必须在当前传送的相关信号边沿重新同步。
什么是波特率波特率的分析

什么是波特率波特率的分析波特率可以通俗的理解为一个设备在一秒钟内发送(或接收)了多少码元的数据。
那么你对波特率了解多少呢?以下是由小编整理关于什么是波特率的内容,希望大家喜欢!波特率的定义模拟线路信号的速率,以波形每秒的振荡数来衡量。
如果数据不压缩,波特率等于每秒钟传输的数据位数,如果数据进行了压缩,那么每秒钟传输的数据位数通常大于调制速率,使得交换使用波特和比特/秒偶尔会产生错误。
在信息传输通道中,携带数据信息的信号单元叫码元,每秒钟通过信道传输的码元数称为码元传输速率,简称波特率。
波特率是指数据信号对载波的调制速率,它用单位时间内载波调制状态改变的次数来表示(也就是每秒调制的符号数),其单位是波特(Baud,symbol/s)。
波特率是传输通道频宽的指标。
每秒钟通过信道传输的信息量称为位传输速率,也就是每秒钟传送的二进制位数,简称比特率。
比特率表示有效数据的传输速率,用b/s 、bit/s、比特/秒,读作:比特每秒。
波特率与比特率的关系也可换算成:比特率=波特率*单个调制状态对应的二进制位数例如假设数据传送速率为120符号/秒(symbol/s)(也就是波特率为120Baud),又假设每一个符号为8位(bit)即八相调制(单个调制状态对应3个二进制位),则其传送的比特率为(120symbol/s) * (3bit/symbol)=360bps.波特率的分析举例它是对信号传输速率的一种度量,通常以“波特”(baud)为单位。
波特率有时候会同比特率混淆,实际上后者是对信息传输速率(传信率)的度量。
波特率可以被理解为单位时间内传输码元符号的个数(传符号率),通过不同的调制方法可以在一个码元上负载多个比特信息。
波特率一般指的是调制解调器的通讯速度。
波特率是指线路状态更改的次数。
只有每个信号符合所传输数据的一位时,才等于每秒位数。
为了在彼此之间通讯,调制解调器必须使用相同的波特率进行操作。
如果将调制解调器的波特率设置为高于其他的调制解调器的波特率,则较快的调制解调器通常要改变其波特率以匹配速度较慢的调制解调器。
ECAN Tools 软件使用说明
ECAN Tools软件使用说明软件安装1、在Windows 系统第一次安装软件:Ⅰ、在产品光盘目录下,找到ECAN Tools文件夹,点击Setup.exe 安装文件,双击后系统开始安装。
Ⅱ、单击下一步继续;Ⅲ、如果同意许可协议点击“同意”继续安装,否则点击“拒绝”退出安装。
Ⅳ、如果要安装到不同的目录,请单击“浏览”按钮,选择好安装目录后,点击确定;Ⅴ、一直点击一步,开始复制文件;Ⅵ、文件复制完成,点击“完成”按钮,退出安装;Ⅶ、文件复制完成后,此时将CAN分析仪用USB 电缆与PC 机正确连接;软件使用ECANTools软件使用手册目录一、概要- - - - - - - - - - - - - - - - - - - - -1 . 1 定义说明- - -- - - - - - - - - - - - - - - -1 .2 快速查找- - - - - - - - - - - - - - - - - -二、概述- - - - - - - - - - - - - - - - - - - - -2 . 1 概要- - - -- - - - - - - - - - - - - - - - -2 . 2 客户机服务器概念- - - - - - - - - - - - - - -2 .3 控制面板- - - - - - - - - - - - - - - - - - -2 . 4 客户程序- - -- - - - - - - - - - - - - - - - -2 . 5 开放的应用程序接口- - - - - - - -- - - - - - -三、安装和启动- - - - - - - - - - - -- - - - - - - -3 . 1 安装- - - - - - - - - - - - - - - - - - - - - - 3 . 2 系统要求- - - - - - - - - - - - - - - - - - - -3 . 3 启动- - - - - - - - - - - - - - - - - - - - - -四、软件使用- - - - - - - - - - - - - - - - - - - - -4 . 1 软件启动- - - - - - - - - - - - - - - - - - - - - 4 . 2 波特率自动识别 - - - - - - - - - - - - - - - - - 4 . 3 数据接收相关功能- - - - - - - - - - - - - - - - - 4 . 4 数据发送相关功能- - - - - - - - - - - - - - - - - 4 .5 总线诊断功能- - - - - - - - - - - - - - - - - - -1 .1 定义说明CAN:控制器局域网(C ontroller A rea N etwork)。
第12章 增强型控制器局域网(eCAN)

周鹏 安徽工程大学电气工程学院
3. 错误帧
错误标志 界定符
6
0~6
8
周鹏 安徽工程大学电气工程学院
4. 过载帧
过载标志 6 过载界定符的重叠 过载界定符 8
周鹏 安徽工程大学电气工程学院
5. 帧间空间
间歇 3 总线空闲 0~∞ 间歇 3 挂起传送 8 总线空闲 0~∞
周鹏 安徽工程大学电气工程学院
周鹏 安徽工程大学电气工程学院
12.1.1 CAN网络和模块
控制器局域网络(CAN) 使用一个串行多主机 通信协议,此协议有效地支持分布式实时控制,具 有非常高的安全级别,并且通信速率可达1Mbps。 CAN 总线是嘈杂和恶劣的环境,如汽车和其他要 求可靠通信的工业领域应用的理想选择。 高达8字节数据长度的已设定优先级的消息可 以通过多主机串行总线发送,此总线使用一个仲裁 协议和一个错误检测机制来确保高度的数据完整性。
~ ~
61E0h-61E7h 61E8h-61EFh 61F0h-61F7h 61F8h-61FFh 邮箱28 邮箱29 邮箱30 邮箱31
~ ~
超时控制(在SCC模式中被保留)-CANTOC 超时状态(SCC模式中被保留)-CANTOS 保留
消息信箱(16字节) 61E8h-61E9h 61E8h-61EBh 61E8h-61EDh 消息标识符-MSGID(32位) 消息控制-MSGCTRL(32位) 消息数据低-MDL(4字节) 消息数据高-MDH(4字节)
第12章 增强型控制器局域网(eCAN)
12.1 CAN总线概述
12.1.1 CAN网络和模块
12.1.2 CAN协议概述 12.2 TMS320F281x eCAN模块概述 12.2.1 TMS320F281x eCAN的结构与特点 12.2.2 eCAN的工作模式
CAN ro V 软件使用说明
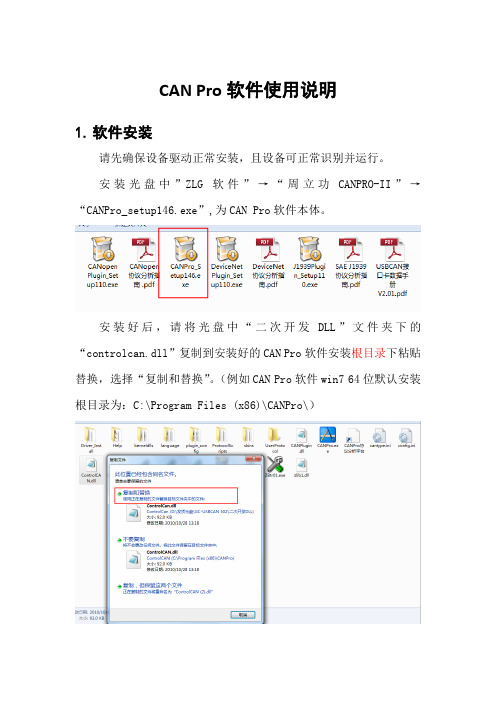
CAN Pro软件使用说明1.软件安装请先确保设备驱动正常安装,且设备可正常识别并运行。
安装光盘中”ZLG软件”→“周立功CANPRO-II”→“CANPro_setup146.exe”,为CAN Pro软件本体。
安装好后,请将光盘中“二次开发DLL”文件夹下的“controlcan.dll”复制到安装好的CAN Pro软件安装根目录下粘贴替换,选择“复制和替换”。
(例如CAN Pro软件win7 64位默认安装根目录为:C:\Program Files (x86)\CANPro\)2.软件启动打开CAN Pro软件,在使用前您可以设置自定义文本颜色,如您需要自定义各个文本颜色,请在启动设备前,选择“操作”→“系统参数”,来自定义文本显示中的各项内容。
自定义文本颜色功能非常强大,可有效在大量数据中分辨已设置好颜色的各类型数据,方便进行数据分析。
定义好之后,点击“启动”打开硬件设备,如设备与软件正常连接,设备指示灯PWR和SYS将有一个常亮,一个慢闪(大概1秒1次)。
如提示“打开设备失败”,请检查设备管理器中是否已经安装好设备驱动,或是“controlcan.dll”是否已经覆盖替换,或是否已经用其他软件打开硬件设备造成端口被占用。
点击启动设备后弹出设置波特率对话框,设置波特率必须与被测总线一致,才可以正常收发数据,如您是双通道设备,可对CAN1、CAN2分别设置波特率,如您需要自定义特殊波特率,请与我们联系。
界面中只需要设置波特率,其他选项无需设置,保持默认即可。
3.软件功能及使用CAN Pro软件功能非常多,且对于数据分析来说非常强大,但美中不足的是设置起来相对繁琐,这里对一些常用功能做一些介绍。
下图为软件的功能列表。
3.1数据接收相关功能3.1.1 分类显示功能可以将目前已经接收到的数据按设置的规则进行数据分类,点击“设置条件”会出现分类条件对话框,选择您要分类的条件点击“添加”,即可添加到已有分类条件,不想使用的条件点击“删除”即可。
2.USB-CAN Tool调试软件安装与使用说明书

USB_CAN TOOL调试软件说明书说明书版本:V2.04更新日期:2019.01.20目录第一章软件安装 (1)1.1USB-CAN TOOL软件安装 (1)第二章USB-CAN TOOL使用说明 (16)2.1界面介绍 (17)2.1.1标题栏 (17)2.1.2菜单栏 (17)2.1.3发送设置区 (17)2.1.4 ID格式设置 (18)2.1.5 接收滤波ID设置 (18)2.1.6控制按钮 (18)2.1.7 统计区 (18)2.1.8 数据列表 (19)2.2启动和关闭设备 (19)2.2.1 选择设备类型 (19)2.2.2 启动USBCAN适配器 (19)2.2.3 关闭USBCAN适配器 (19)2.3发送消息 (20)2.3.1 帧ID (20)2.3.2发送总帧数 (20)2.3.3 ID递增 (20)2.3.4 数据递增 (20)2.3.5数据 (21)2.3.6发送文件 (21)2.4接收消息 (23)2.5CAN参数 (24)2.5.1 CAN参数设置 (24)2.6其他设置 (27)2.6.2递增校验 (28)2.6.3通道接收使能 (28)2.7信息 (28)2.7.1当前参数 (28)2.7.2设备信息 (29)2.8数据显示 (30)2.8.1高速模式 (30)2.8.2列表数据 (31)2.8.3信息存储 (31)2.8.4字节顺序 (32)2.8.5合并相同ID数据 (32)2.8.6数据格式 (33)2.8.7接收帧率显示 (33)2.8.8发送帧率显示 (34)2.8.9 时间标识格式 (34)2.9数据接收软件滤波 (35)2.10数据显示列表 (35)2.10.1序号 (35)2.10.2系统时间 (36)2.10.3 时间标识 (36)2.10.4 CAN通道 (36)2.10.5 传输方向 (36)2.10.6 ID号 (36)2.10.7 帧类型 (36)2.10.8 帧格式 (36)2.10.9 长度 (36)2.10.10 数据 (37)2.11便捷辅助功能 (37)2.11.2校验错误保存到文件 (37)第一章软件安装1.1 USB-CAN TOOL软件安装直接运行光盘目录下“资料光盘\调试工具\原厂调试工具\USB_CAN TOOLSetup(V9.xx).exe,安装即可。
ECan总线模块讲解

ECa n总线模块访问ECAN模块可分为控制/状态寄存器和32个邮箱的访问。
每个邮箱都有一个可编程接受屏蔽寄存器,其所占用的 512字节RAM 都可以配置为发送或接收邮箱。
每个邮箱包括 8字节数据区,29位标识符和几个控制位,每个邮箱都是有4个32位的寄存器构成。
即:ECAN空制器总共有15个32位的控制寄存器,控制着位定时器、邮箱的发送或接收使能、错误状态及CAN中断等。
其控制寄存器的状态寄存器只能允许32位访问,而接收屏蔽、时间标识寄存器、超时寄存器和邮箱所在的CAN范围则可以以8位、16位和32位方式访问。
该程序中都是进行32位访问,通过设置影子寄存器可实现对位进行操作。
如以下程序:struct ECAN_REGS ECa nbShadow;EALLOW; // EALLOWnables access to protected bitsECa nbShadow.CANTIOC.all = ECa nbRegs.CANTIOC.all;ECa nbShadow.CANTIOC.bit.TXFUNC=1; // 发送ECa nbRegs.CANTIOC.all = ECa nbShadow.CANTIOC.all;EALLOV是指允许对受保护的寄存器操作,通常和EDIS配套使用,EDIS是指恢复被保护寄存器的状态。
#defi ne EALLOW asm(" EALLOW")#define EDIS asm(" EDIS") ( device.h)初始化CAN步骤:1.使能 GPIO 口( GPIO8为 CANTX,GPIO1O为 CANRX);2.设置CANTX和CANRX为CAN的通信引脚;3.选择是增强型还是标准型;4.相关寄存器清零;(邮箱控制寄存器清0;复位TA;RMP寄存器所有位置1,表示邮箱中存在发送的数据;清除所有中断标志)5.设置时间配置寄存器的三个步骤(设置CCR=1,等待CER=1,然后设置CANBTC);ECa nbShadow.CANMC.all = ECa nbRegs.CANMC.all;ECa R = 1 ;ECa nbRegs.CANMC.all = ECa nbShadow.CANMC.all;ECa nbShadow.CANES.all = ECa nbRegs.CANES.all;do{ECa nbShadow.CANES.all = ECa nbRegs.CANES.all;} while(ECa E 匸1 );配置时钟程序此处省略6.配置CANBTC确认TSEG和TSEG不等于0,如果这两个同时为0, 则CAN 模块不能退出初始化模式。
6.插件2:波特率侦测工具使用说明书

6.插件2:波特率侦测工具使用说明书波特率侦测工具使用说明书说明书版本:V2.00更新日期:2015.10.01目录第一部分概述 (1)第二部分操作流程 (2)2.1 操作流程 (2)2.2 列表项目 (3)2.3 常规波特率侦测 (4)2.4 范围波特率侦测 (4)2.5 侦测结果 (4)2.6 侦测结果应用 (5)第一部分概述波特率侦测工具用来实现在未知CAN总线波特率的情况下,通过USB-CAN适配器按照一定规律扫描总线波特率,并最终确定总线工作的波特率的实用工具。
本工具目前支持USB-CAN和CANalyst-II系列各类型的适配器(CANalyst-II分析仪在选择设备型号时选择USB-CAN2.0)!要侦测到总线波特率,要满足以下条件:1、CAN总线上如果存在多个节点,这些节点必须工作于同一波特率下。
即总线工作正常;2、CAN总线上至少有一个节点处于工作状态,即这个节点要在波特率侦测期间向总线连续发送CAN消息。
第二部分操作流程2.1 操作流程波特率侦测之前,请确保USB-CAN适配器已经正确连接到被侦测的CAN总线上,插入计算机USB端口,并且成功安装了硬件驱动程序;计算机中已经安装了USB-CAN Tool软件。
首先双击桌面“USB_CAN TOOL”软件快捷方式,打开USB_CAN TOOL软件。
打开波特率侦测工具,您将看到如下图所示的界面,1、选择设备类型、设备索引和CAN 通道号;2、点击“启动设备”来打开设备;3、开始快速侦测或者范围侦测。
在侦测过程中,如果需要中止,请点击界面右下角的“停止”按钮!2.2 列表项目软件界面中,列表显示区域,罗列了波特率的详细参数,解释如下:1、波特率:探测的波特率的实际值2、状态:显示当前的侦测状态3、Timing0(BTR0):兼容SJA1000控制器的BTR0寄存器值4、Timing0(BTR1):兼容SJA1000控制器的BTR1寄存器值5、同步跳转宽度:我公司所用适配器的波特率参数,在随机软件的USBCAN TOOL中的参数设置中,有对应选项。
Ecan动态库使用手册5.2
沈阳广成科技有限公司
USBCAN Ecan 接口函数库使用手册
1 接口函数库说明及其使用
1.1 接口卡设备类型定义
各个接口卡的类型定义如下: 设备名称 USBCAN-I USBCAN-II
设备类型号 3 4
1.2 错误码定义
名称 ERR_CAN_OVERFLOW ERR_CAN_ERRALARM ERR_CAN_PASSIVE ERR_CAN_LOSE ERR_CAN_BUSERR ERR_CAN_REG_FULL ERR_CAN_REC_OVER ERR_CAN_ACTIVE ERR_DEVICEOPENED ERR_DEVICEOPEN ERR_DEVICENOTOPEN ERR_BUFFEROVERFLOW ERR_DEVICENOTEXIST ERR_LOADKERNELDLL ERR_CMDFAILED ERR_BUFFERCREATE
typedef struct _BOARD_INFO { USHORT hw_Version; USHORT fw_Version; USHORT dr_Version; USHORT in_Version; USHORT irq_Num; BYTE can_Num; CHAR str_Serial_Num[20]; CHAR str_hw_Type[40]; USHORT Reserved[4];
10仲裁丢失在识别码的bit1111仲裁丢失在srtr位12仲裁丢失在ide位13仲裁丢失在识别码的bit1214仲裁丢失在识别码的bit1315仲裁丢失在识别码的bit1416仲裁丢失在识别码的bit1517仲裁丢失在识别码的bit1618仲裁丢失在识别码的bit1719仲裁丢失在识别码的bit1820仲裁丢失在识别码的bit1921仲裁丢失在识别码的bit2022仲裁丢失在识别码的bit2123仲裁丢失在识别码的bit2224仲裁丢失在识别码的bit2325仲裁丢失在识别码的bit2426仲裁丢失在识别码的bit2527仲裁丢失在识别码的bit2628仲裁丢失在识别码的bit2729仲裁丢失在识别码的bit2830仲裁丢失在识别码的bit2931仲裁丢失在ertr位沈阳广成科技有限公司usbcanecan接口函数库使用手册产品使用手册shenyangguangchengtechnologycoltd
CanMoon软件使用说明
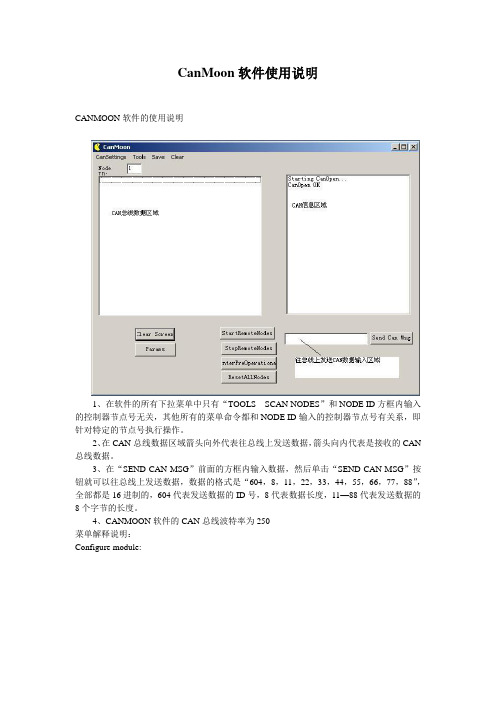
CanMoon软件使用说明CANMOON软件的使用说明1、在软件的所有下拉菜单中只有“TOOLS---SCAN NODES”和NODE ID方框内输入的控制器节点号无关,其他所有的菜单命令都和NODE ID输入的控制器节点号有关系,即针对特定的节点号执行操作。
2、在CAN总线数据区域箭头向外代表往总线上发送数据,箭头向内代表是接收的CAN 总线数据。
3、在“SEND CAN MSG”前面的方框内输入数据,然后单击“SEND CAN MSG”按钮就可以往总线上发送数据,数据的格式是“604,8,11,22,33,44,55,66,77,88”,全部都是16进制的,604代表发送数据的ID号,8代表数据长度,11—88代表发送数据的8个字节的长度。
4、CANMOON软件的CAN总线波特率为250菜单解释说明:Configure module:Node ID:代表控制器的节点号:1--127ODULETYPE:代表控制器的型号:2023/2024TER RESISTOR(1=ON,2=OFF):表示CANOPEN端口的终端电阻是否使用。
BAUDRATE:代表CANOPEN通讯的波特率:250,固定不变MASTER=2/SLAVE=1:代表本控制器是主还是从OVERRIDE(0=OFF,1=ON):代表是否使用溢出:固定为0,不溢出。
用户通过CONFIGURE MODULE可以修改控制器的节点号、主从关系。
在用户修改完节点号或主从关系后,必须将控制器断电10秒后然后上电修改的数据方能保存或者选择SA VE ALL PARAMETERS菜单保存修改的参数。
CHANGE PARAMETER V ALUES(%MW0~%MW247):在NUMBER/ADDRESS内输入需要改变或查看的%MW0~%MW247的代号:0—247,然后在V ALUE方框内会显示相应地址的值,如果修改V ALUE方框内的值,然后单击“CHANGE V ALUE”,相应地址里面的值就改变了。
视易中控盒协议V2.1
视易中控盒协议福州星网视易信息系统有限公司更新记录:版本作者日期内容1.0 胡长涛2007.10.121.1 徐继芸2008-12-12 修正,补充中控盒PS/2协议部分1.2 徐继芸2010-7-8 增加7种点歌方式协议1.3 徐继芸2010-9-14 调整为标准格式,增加“墙板扩展协议”1.3.2 程明传2010-10-29 标注墙板协议不支持的选项1.3.3 陈林2010-12-01 新增取消服务下行命令1.4 王小强2012-3-20 统一上行指令1.5 王小强2012-10-29 增加门牌灯协议1.6 王小强2012-11-1 增加中控盒串口上行协议1.7 王小强2012-11-23 增加气氛上行协议、修订了上行协议有分直接处理和需应用处理两种。
1.8 王小强2012-11-29 修订音效和灯光协议,增加直接处理和需应用处理两种。
1.9 王小强2012-12-18 修正电视频道控制说明,增加上行协议备注说明。
2.0 王小强2012-12-21 增加灯光全开全关协议2.1 王小强2013-08-16 增加灯光路数增加红外码协议目录目录 (3)0.文档介绍 (4)0.1.文档目的 (4)0.2.文档范围 (4)0.3.读者对象 (4)0.4.参考文档 (4)1.概述 (5)2.视易中控盒串口协议(下行) (5)2.1.概述 (5)2.2.协议说明 (5)2.2.1.控制功放 (5)2.2.2.控制服务灯 (6)2.2.3.控制灯光 (6)2.2.4.门牌灯 (6)3.视易中控盒PS/2口协议(上行) (9)0.文档介绍0.1. 文档目的本文档为视易中控盒协议标准,旨在规范视易中控盒外设通信协议。
0.2. 文档范围视易中控盒协议。
0.3. 读者对象视易外设支持开发人员;视易外设厂家;相关代理商技术支持。
0.4. 参考文档Adam Chapweske. PS/2 Mouse/Keyboard Protocol.1.概述视易中控盒协议包括串口协议和PS/2键盘口协议。