一种新的离散系统变结构控制方法
基于组合趋近律的离散系统的滑模变结构控制

s )C C( ()xk) ( = 正= k一 () k R () 3
( 4)
控 制 律 为
uk=C 。C R k 1 C () s + ) ()( )。 (+ ) Axk一 ( 1 ( 一 k )
() 1
() 2
・ 啪
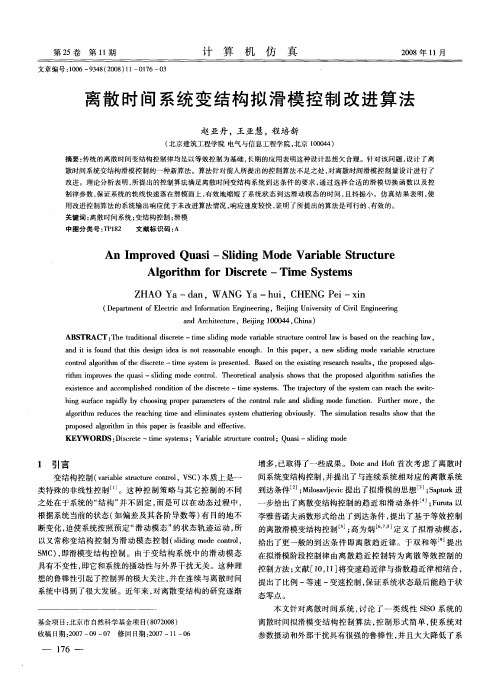
图 1 指 数 趋 近 律 的 控 制信 号 输 出
设位置指 令为 r )其 变化率 为 d()则 R [k d() RI【 k 1 (, k r , k =r ) rk】 :r + ) ( , ( d(+ ) (+ ) d(+ ) 用 线 性 外 推 的方 法 进 行 预 测 : r 1 。r 1 k 1 k 及 r 1 k 采
s + )s )一 Tl() sns ) ( 1一( = e xkl g(k) k k l } ( 考 虑 二 阶 离 散 系 统 状 态方 程 如 下 :
x +)A ()B ( x 1 ( 1= xk+ xk k ) ER , ∈R 1
时, 采用 幂次趋近律 , l ( l< 当 l k I k时 , ) x 采用变速趋 近律。当我们选定 k 时, 必须 合 适 。选 的太 大 , 减 弱 变 速 趋 近 律 的优 点 ; 会 而选 的 过 小 , 可 则 能产 生大幅度 穿越抖振 。这样体现不 出幂 次趋近律 的特点 。
3仿 真 实 验 研 究 .
针 对 传 递 Βιβλιοθήκη 数 为 ‘‘ …—
1 0 S
s+ 0 (— ) s2
控制 系统的采样周期为 O 0 . 1,将传递 函数 离散化后 的状态 方程 0 s
非线性控制及其仿真-变结构控制(VSC)
非线性控制及其仿真——变结构控制(VSC )本节课之前学习了动力学系统的状态空间建模方法、系统内部特性的分析方法以及状态反馈控制/状态观测的基本方法。
本节课开始讲解具有非线性非光滑反馈特性的变结构控制及其数学仿真。
通常在动力学系统中引入控制力作用使其成为受控系统,对于导弹和航天器而言都是如此,通过引入控制系统使其弹体特性更好,反馈机制是经典动力学系统中没有的而受控系统中特有的机制,反馈的引入可以使人们按照意愿改善系统的特性,也可以使得一个系统:1、非线性状态反馈已知二阶系统:(,,)x f x x u y x =⎧⎨=⎩令12,x x x x ==,则可将其写成状态方程:122121(,,)x x x f x x u y x =⎧⎪=⎨⎪=⎩ u 为待设计的控制量,控制的目标是使得:0y v →或者预先设定的实时可知的状态轨线1()v t 。
假设1:状态12,x x 可以实时获取 分以下两种情况:① 函数12(,,)f x x u 已知,且对于任意12(,,)f x x u v =,方程都可解;② 函数12(,,)f x x u 未知,其中含有不确定因素。
1.1 情况1(方程可解)由于12(,,)f x x u v =,因此可以求解得到:12(,,)u k x x v =,将其带入原系统,可以得到:1221212(,,(,,))x x x f x x k x x v v=⎧⎨==⎩ 对其实施误差反馈,选择新的状态为111221,e x v e x v =-=-,状态方程可以写为:122121212(,,(,,))e e e f x x k x x v v v =⎧⎨=-=⎩ 如果将2v 看做该系统新的输入,则其等效为一个纯积分串联线性系统。
假定1()v t 和其微分均为已知,这样可以进行状态反馈控制设计:21122v e e ββ=+然后可以反解得到原控制器设计如下:1221(,,)u k x x v v v v ==+举例: 1.2 情况2更为一般的情况,如果欲使原系统具有给定的动态特性:12212(,)y y y g y y =⎧⎨=⎩ 可以由非线性反馈将原系统变为线性控制系统,令12(,)v g y y =则原系统可以变为:12212(,)x x x g x x =⎧⎨=⎩ 两者动态特性一致。
一种离散全程滑模变结构控制方法
Abta tA l a s dn d a a l SrcueC nrl r G S s c : nG o l l igmo eV r be t tr o t l ( V C)d s nn to spo r b i i u oe ei igme di r— g h psdf i rt t ess m i ti p p rT i a poc u rnesta tet jc r fh yt 卜 oe r s e m yt s ae. hs p rahg aate t a t yo ess m a o d c ei e nh h r eo h t e
q ia e tc n o t o .T i me o a v r o h f c fc atrn . e smu a in r s l o — u v ln o t lmeh d r hs t d c n o e c me t e ef to h t i g T i l t e u t fi h e e h o n
1 引 言
在传统 的滑模变结构控制系统 中 , 其运动过程 由两 部 分 组 成 , 趋 近 模 态 ( M)和 滑 动 模 态 即 R
( M) S 。趋 近模 态 阶段 系 统 运 动 在 有 限 时 间 内从 任 意初 始状态 到达 滑模 切换 面 , 动 模 态 系 统 在控 制 滑
v te e d u mo e s a s r s n e o d mo s ae i fe tv n s . e t d p n ul m d li lo p e e td t e n t t t ef cie e s r s Ke y wor : o a ld n d Va a l tucu e c n o ; uia e tc n o ; at rn ds Gl b lsi i g mo e; r b e sr t r o t l Eq v ln o t l Ch t i g i r r e
基于可拓控制的离散变结构系统的组合控制
 ̄ q ec ht r gei s nvr bes u tr o t lV C)ytms S c h nme o mi S p ligV C eu n y at i xs ai l rcuecnr ( S ss c en ti a t o e . u hp e o nnl tyi fr d y rd c nrlsrtg s o me .Th e o to tae yi u e ord c h h t rn n mpo ed n mi en w c nr l r tg s sdt e u etec at iga di rv y a c s e
DI h n, AO C e CHE N Xi—p n ig
( olg f lc i l n nomai nier g az o nv f eh ,L nh uG n u70 5 , hn ) C l eo etc dIfr t nE gn ei ,L nhuU l.o c . az o a s 3 0 0 C ia e E raa o n T
ABS TRACT: h s p p rp e e t e y rd c n r l ta e y f r ic e ev ra l tu t r o to y t msa d T i a e r s n san w h b i o t r t g s r t a i b e sr c u ec n r l se n o s o d s
趋近率和可拓控制的组合控 制策 略。 这种新 的控制策 略能有效地削弱抖振 提高系统 的动态性能。 最后 通过将传统组 合控制 策略与所提出的组合控制策略仿 真比较 , 其结果表 叫新 的组 合控制策略能够获得令 人满意 的结果 。
关键词 : 变结构控制 ; 可拓控 制; 趋近律 ; 控制策 略; 仿真 中图分类号 :P 8 T 12 文献标识码 : A
基于自适应趋近律的一种离散时间系统变结构控制

鉴 于 自适 应 趋 近 律 在 状 态 收 敛 和 控 制输 出方 面 的显 著 特性 , 中提 出一 种将 指数 趋 近律 与 自适应 趋 文 近律 相结 合 的趋 近律 , 保 证 了原 点 的收 敛性 , 解 既 又
文献 [ ]提 出变速 趋 近 律 , 指 数 趋 近 律 的带 状 切 换 2 将
李 涛 , 合 新 , 张 孙 鹏
( 二炮兵工程 学院 , 安 第 西 702) 1 0 5
摘
要 : 提 高 离 散 趋 近 律 的 趋 近 速 率 和收 敛 性 能 , 出一 种 基 于 自适 应 趋 近 律 的 改 进 离 散 时 间 滑模 趋 近 律 . 为 提
应 用 该 方 法 设 计 的 变 结 构 控 制 系 统 比 自适 应 趋 近 律 趋 向 滑模 面 的 速 率 更 快 , 原 点 的 稳 定 性 和 系 统 的平 稳 性 其
区转 化 为 扇 形 切 换 区 , 而 保 证 了 原 点 的 收 敛 性 。 从 文 献 [ ]提 出 的 比 例 一 速 一 速 趋 近 律 改 进 了 变 速 趋 近 3 等 变
大 ; 接 近 滑 模 面 时 趋 近 速 度 比较 慢 。 文 林 提 出 ② 李 ]
0 引 言
2 世纪 9 O 0年代 初 , 为炳 L 指 出 不 等式 到达 条 高 l 件 在描 述离 散 时间 滑模 运 动时 的 不 完整 性 , 出 等式 提
到达 条件 的离散 指 数趋 近 律 :
LITa ZH A NG ex n, o, H i SU N n Pe g ( he S c d A ril r gi e i g Cole e。 ’ n 7 002 T e on tle y En ne rn l g Xi a 1 5。Chi ) na Ab t a t A n i pr e e c ng lw fdic et- i e si n o s pr os d s d on t d tv e c ng lw O e an e t sr c : m ov d r a hi a o s r e tm l di g m de wa op e ba e he a ap i e r a hi a t nh c he r a hi a e a d c nve ge t fat r . T h e c i g a e oft rab e s r t e s t e c ng r t n o r n e u e e r a h n r t he va i l tuc ur ysem esg d hr gh t s w a s f s e ha d i ne t ou hi y i a t rt n t td i ha esgne hr g a ptve r a hi a . a d t t biiy ofo i n an t a h yse r om p r tvey bet r Si ul d t ou h da i e c ng l w n hes a lt rgi d s e dy oft e s t m a ec a ai l te. m a ton r s t ho t fe tve es f t r i e ulss w he e f c i n s o he p opo e on r llw . s d c t o a Ke wo d dic e e tm e s t m ;s i ng m od y r s: s r t -i ys e ldi e; v ibl t u t r ara e s r c u e;r a hi a e c ng lw
从多尺度到介尺度——复杂化工过程模拟的新挑战

万方数据化工学报第61卷阳能和生物质能等可再生能源技术以及节能减排和C0:捕集、储存等技术成为化学工程和相关学科研究的一个焦点。
为了应对这些问题,不但需要考虑单一的设备与过程,更需要考虑产品的整个生命周期及其与其他产品的关系。
因此,时空多尺度结构和复杂系统更多地引起了这些学科的关注,而介于单元与系统整体间的介尺度行为可以说是其中最关键的环节。
1介尺度蕴含着复杂体系的共性基础问题目前化工和很多其他学科中的瓶颈问题具有共同的本质。
例如,人们能够测定很多材料的宏观性能(如应力应变关系)以及微观的分子结构,但很难为特定的性能设计相应的材料组成和制备工艺,因为这些分子和原子会在不同条件下形成复杂而多变的多尺度结构,从而产生截然不同的性能。
聚乙烯材料在结晶状态下能达到类似金属的强度,而如果以无规微团聚集,仅能用作一般的包装材料。
又如,一般能描述工业设备的总体操作特性,也清楚其工作原理和微元过程,但很难从理论上优化这些设备的性能,因为设备中的工质或构件的运动、传递和反应过程也具有多尺度的复杂行为。
再如,蛋白质的三维结构和氨基酸序列可以精确测定,却难以描述其折叠过程。
类似的问题还能举出很多,但都可以概括为[1]:复杂系统大多表现出不同的层次,而每个层次中又有多尺度的结构。
尽管不同层次的多尺度结构不同,但都有一个共同属性,即每个层次的边界尺度上系统的行为相对简单,易于表征、分析;而在它们之间的尺度上,系统行为大多非常复杂,还缺乏成熟理论描述,这些尺度称为介尺度。
介尺度普遍存在而且不同系统在不同层次上的介尺度行为的共性本质已逐步体现。
值得注意的是,介尺度并非一个具体的时空尺度,而是~个相对的概念,在不同问题中对应于不同的特征尺度。
但不同问题中的介尺度行为却有共性的本质,并且往往是解决该问题的瓶颈所在。
以化工过程为例,如图l所示[1],介尺度问题既出现在介于原子、分子和整个催化剂颗粒之间的表界面和内孑L尺度,也出现在介于单颗粒和反应器整体间的聚团和气泡尺度,还出现在介于设备和生态园区间的工厂尺度,而这些尺度上都呈现典型的复杂性。
受扰离散时滞系统的最优变结构控制
式 中 . I- z X ∈ ( l ) 状 态 向 量 ;f x , , 是 ] 2 l∈
1 是 控 制 向量 ; B、 A 、 c和 D是 相 应 维 数 的 已知 实 常 量 矩 阵 并 且 矩 阵 非 奇 异 ; > h 0是 时 滞 常
数;
是 系统 内摄 动 及 外 扰 动 ; () 。 ∈r 是 已 后
x ( +1= 11 ) 1 E ) l k ) A1 ( + 2 ( + X尼 Xk C l 一 + () x ) Dok k=0 12 … ,,, x(+1= l() A2 (-h+ 2 k ) Az k + 2 k ) X x
f
组 成 部 分 . 在 控 制 系 统 中 , 于 时 间 延 迟 , 由 时
于 时滞 离 散 系统 还 未见 这方 面 的研 究 报道 , 尚待 解 决 的 问题 还 很 多 .本 文针 对 离 散 时滞 不 确 定 系 统 , 合 最 优 控 制 理 论 与 滑 模 控 制 方 法 , 计 结 设
后 ,,, =0 12 …
式 中 ∞∈R 为 外 系 统 的 状 态 向 量 ,G∈R , F∈R 为 常 数 矩 阵 择 QER 1, - 是正定 矩 阵 ,
1
最 优 滑模 面 .仿 真 结果 表 明 , 提 方 法 能 实现 状 所
态 轨 迹 在 滑模 面上 滑 动 运 动 的最 优 化 .
中 f) 尼 是如 下 两 点 边值 问题 的解
x ( +1 l k ) A1 l ) x( 一 一 l ( +C l Xk k
滞现象普遍存在. 时滞 的存 在 严 重 降低 系统 的性
能 , 至使 系 统 失 稳 . 在 具 有 时 滞 的离 散 不 确 甚
一种改进的离散变结构控制算法

YANG n Ya g,LIS — h n hu c e
( c o lo n o ma i n a d Co t o S h o f I f r to n n r l Eng n e i g,Li o i g Sh h a Un v r iy, s u 1 0 1, i a i e rn a n n i u i e st Fu h n 1 3 0 Ch n )
Absr c The d sgn o a i b e s r c u e c t ole a e he d s r t we xp ta t: e i f v ra l t u t r on r lr b s d on t ic e e po r e o— n n i lr t r a hi a e ta a e e c ng l w i r s a c e . The he o e n f ys e s eerh d p n m no o s t m c te i g s n ha t rn u i g c ve i n le po nta a e r a hi g lw s a a y e nd a s i i g r a h ng l wsi r — on nto a x ne ilr t e c n a i n l z d a ld n e c i a s p o p s d, o e whih o e c m e he s c v ro s t horc mi s oft l ne The mo fe ago ih e — t o ng he o d o . dii d l rt m n
期、 到达 速度 和 趋 近 速度 指 数 。该 趋 近 律 较为 深
刻 地 揭 示 了 离 散 时 间 系 统 变 结 构 控 制 的 运 动 机
不确定离散系统全程滑模变结构控制

蔡 国梁 , 维 怀 , 周 郑 松 , 浩 祥 汪
( 江苏大学 非线性科学研究 中心 ,江苏 镇 江 22 1 ) 10 3
摘要 : 对 参数 不确 定 和外部 扰 动的 不确 定 离散 系统 , 出 了一种 全 程 离散 滑模控 制 器. 了减 少 针 提 为 抖动 , 用 了变 结构概 念 的边界 层 方 法. 应 通过 选择 离散 变结 构控 制 中的最佳 边界 值 , 证 了 离散 系 保
.
J | R A L O F l 0 j I AN ( S UN l VERSI TY( H r l ce c d t n Na l in e E i O ) a S i
翥 _
d i1 .9 9 ji n 1 7 —7 7 . 0 0 0 .2 o:0 3 6 /.s . 6 1 7 5 2 1 . 3 0 5 s
u e t ite n xe n ldsu b n e . I r e o r d c h t rn nc ran i sa d e t r a it r a c s n o d rt e u e c at i g,t e b u d r a e t o sn e h o n a y ly rmeh d u i g v ra l t t r o e ti a p i d. By c o i n o i l b u a a e d h,t s se tt s a ib e sr u e c nc p s p le uc ho sng a pt ma o nd r ly rwi t y he y tms sae r a h si i g mo e s ra e e a ty i he h re ttme a d t e e fe t y o t u h te i g o h e c ld n d u fc x cl n t s o ts i n h r at r sa n wi ho t c a trn n t e
一种基于神经元离散滑模变结构的位置控制方法

Po iin s r o c nt o e h d b s d n n ur n dic e e tm e sto e v o r lm t o a e o e o s r t -i
si i o e v ra e s r c ur ld ng m d a i bl t u t e
i be sr c u e i r p s d.I sb s d o h e in meh d o e c i g lw n o i e t h efla n n a a l tu t r s p o o e ti a e n t e d sg t o fr a h n a a d c mb n d wi t e s l—e r i g c — h p b l y o e r n.Th t b lt ft e ne r n s l—e r i g d s r t ld n d a ib e sr cu e c n r ls se i a ii fn u o t e sa ii o h u o e fla n n ice e si i g mo e v ra l t t r o to y tm s y u a ay e n t e ba i fP p v s p rsa iiy t e r .Ex rme tr s lss w h tt e c n rlme h d ef ci ey r — n lz d o h sso o o u e tb lt h o y pe i n e u t ho t a h o to t o fe tv l e
t l( C)Mahn ol oio e oss m, h ot l lo tm b sdo e rndsrt—m iigm d a— r N o cieT o p s i sI yt tn T e tecnr grh ae nn uo i e t es dn o evr oa i c ei l
滑模变结构控制算法综述
滑模变结构控制算法综述作者:雷渊默万彦辉李淑英来源:《中国科技博览》2016年第27期滑模变结构控制是一种自动控制系统的一种设计方法,可用于连续或离散系统、线性或非线性系统、确定性或非确定性系统、集中参数或分布参数系统和集中控制或分散控制等。
这种控制方法通过让控制量不断地切换,使系统状态进入预先设定的滑模面滑动,故而在遇到参数扰动与外部干扰时具有不变性,系统的动态品质仅取决于滑模面及其参数。
滑模变结构控制是一种非线性、不连续的控制方法。
具有鲁棒性强、可靠性高等优点,得到各国学者的广泛重视与不断研究。
1 滑模变结构的抖振问题解决方法在到达切换面时,运动点会穿越了切换面,形成抖振。
抖振会影响系统的准确性、增加能量消耗、破坏系统性能。
产生抖振的主要原因有:(1)开关的时间滞后:当运动点运动到切换面附近,开关的时间滞后会导致控制延时,从而致使状态的准确变化延时。
因为控制量的幅度会随着状态量幅度逐渐减少,所以抖振表现为一段衰减的三角波。
(2)开关的空间滞后:开关的空间滞后即制造了一个状态量变化的“死区”,抖振表现为一段等幅波形。
(3)系统惯性影响:系统惯性会使得系统在接收到控制信号后,平面时仍存在一定的滞后,其抖振表现为一段衰减的三角波。
针对抖振问题,许多学者都提出的解决方法。
1.1 准滑膜动模态方法20世纪80年代,Slotine[1]在中引入了“准滑动模态”和“边界层”的概念,实现准滑动模态控制。
在边界层以外采用正常的滑模控制,在边界层内为连续状态的反馈控制,有效地避免或削弱了抖振。
此后,有许多学者对该设计进行了拓展与研究。
比如S.C.Y Chung等[2]、J.X.Xu 等[3],分别对于切换函数进行了改进;K.erbatur等[4]、M.S.Chen等[5]等对于边界层设计提出了改进方案。
1.2 趋近律方法高为炳等[6]提出了一种变结构控制系统的抖振消除方法。
选择合适的趋近律的参数,可以减少控制信号的高频抖振。
离散模糊变结构控制在飞行器姿态控制系统中的计算机仿真研究

= ( 卢+ + 一 q / ) L+
+ + , 卢 + 4 ( + ) =
l=卢+ f ,
Co p e m ut r Em ul to t dy o g t lAi c a tAtiu -Co r l a i n S u fDi ia r r f tt de nt o S se s d n he Dic e e Fuz y VS Co t o y t m Ba e o t s r t z nr l
阶 惯 性 环 节 。 时 偏 航 通 道 的运 动方 程 可 以简 化 为 H 此 :
也牺 牲 了 系 统 的 鲁 棒 性 。 而 模 糊 控 制 与 滑 模 变 结 构 控 制 通 过 有机 的结 合 却 可 以 解 决 这 一 矛 盾 , 但 可 以 消 弱 “ 动 ” 而 且 不 抖 ,
M IW e —pe g, G U O a ,H O N G h ng ua n n G ng C e —h ,D O N G e—we W i i
(h eo dameyQigh up t fcr co lQigh uS ad n 6 5 0 C ia T es n r r n zo eyofe h o, n zo hn o g2 20 , hn) c t t i s
为 一个 广 义 的被 控对 象 , 立 其 数 学模 型 。 建 立 飞行 器 姿 态 建 在 控 制 系 统 的数 学 模 型 时 。通 常 将 姿 态 控 制 系统 分 为三 个 独 立
通 道 来 设 计 , 俯 仰 、 航 、 动三 个通 道 。 面 以 偏 航 通道 为 即 偏 滚 下
离散模糊滑模 变结构控 制器, 并利用计算机仿真技 术做 了仿真研 究, 仿真 结果验证 了本 文所设计 的控制率 的有效性。 【 关键词】计算机仿真 离散 数 字式 变结构控制 姿 态控制 系统
无刷直流电动机离散变结构控制器设计与仿真
d v ( L M ) p s in sro ss m i it d c d、 i lt n rs l h w ta te V C hs p r c cnrl n e B DC oio ev yt s nr u e Smuai eut so h t h S a e e t o t t e o o s f o
维普资讯
国 讥 技 22 第 期 0 年 3 0
文 章 编 号 :0 1 9 X(0 2 0 —0 5 —0 10 —8 3 20 )3 0 1 6
SAC & E 研’E' } DVI究 开I { M N’ (与 发 ) l
无 刷 直 流 电 动 机 离 散 变 结 构 控制器设 计与 仿真*
时 ,S V C系统 的离 散模 型 则相 当重 要 。
二 、 散 变 结 构 控 制简 单 原 理 离
考 虑一 个 单输 入 的离散 二 阶被 控 系统 :
于微机 控 制 , 既具 备 交 流 电动机 的结 构简 单 、 行 可 运 靠 、 护 方便 等 一 系列优 点 , 维 又具 备直 流 电动 机 的运 行 效率 高 、 励磁 损 耗 以及调 速性 能好 等诸 多特 点 , 无
李 劲
( 息产业部 电子第 十研究所 , 信 四川 成 都 6 03 ) 10 6
滑模变结构控制
第1章绪论滑模变结构控制简介变结构控制(VSC: Variable Structure Control)本质上是一类特殊的非线性控制,其非线性表现为控制的不持续性,这种控制策略与其它控制的不同的地方在于系统的“结构”并非固定,而是能够在动态进程中,按照系统当前的状态(如误差及其各阶导数等),有目的地不断转变,迫使系统依照预定“滑动模态”的状态轨迹运动,所以又常称变结构控制为滑动模态控制(SMC: Sliding Mode Control),即滑模变结构控制。
由于滑动模态能够进行设计且与对象参数及扰动无关,这就使得变结构控制具有快速响应、对参数转变及扰动不灵敏、无需系统在线辩识,物理实现简单等长处。
该方式的缺点在于当状态轨迹抵达滑模面后,难于严格地沿着滑面向着平衡点滑动,而是在滑模面双侧来回穿越,从而产生哆嗦。
变结构控制出现于50年代,经历了40余年的进展,已形成了一个相对独立的研究分支,成为自动控制系统的一种一般的设计方式,适用于线性与非线性系统、持续与离散系统、肯定性与不肯定性系统、集中参数与散布参数系统、集中控制与分散控制等。
而且在实际工程中逐渐取得推行应用,如电机与电力系统控制、机械人控制、飞机控制、卫星姿态控制等等。
这种控制方式通过控制量的切换使系统状态沿着滑模面滑动,使系统在受到参数摄动和外干扰的时候具有不变性,正是这种特性使得变结构控制方式受到各国学者的重视。
变结构控制进展历史变结构控制的进展进程大致可分为三个阶段:(1)1957-1962年此阶段为研究的低级阶段。
前苏联的学者Utkin和Emelyanov在五十年代提出了变结构控制的概念,大体研究对象为二阶线性系统。
(2)1962-1970年六十年代,学者开始针对高阶线性系统进行研究,但仍然限于单输入单输出系统。
主要讨论了高阶线性系统在线性切换函数下控制受限与不受限及二次型切换函数的情形。
(3)1970年以后在线性空间上研究线性系统的变结构控制。
离散时间系统的滑模控制器设计与仿真研究
状 态也是 全局 有界 稳 定 的。一个新 的切 换 面作为 系统 的输 出信号被提 出 , 别用 来设计 滑模 控 制 器。 系统状 态 特
一
旦进入到准滑动模态, 就对设备参数 变化和外界干扰显示 出强的鲁棒性, 因为控制器的设计完全考虑 了边界
层 的影响 。外推 法被 用来估 计不确 定 离散 时 间 系统 的不确 定值 。 两种方 法均有 效地 消除 了系统 的抖 振 , 保 了 确
离 散 时 间 系统 的滑
( 江南 大学 控制 科 学与 工程研 究 中心 , 苏 无锡 242 ) 江 112
摘 要 :针 对 不确 定性 离散 时 间 系统 , 分析 和设计 了一类 变结构 控 制 器。 当存在 外界 干扰 和 不 确定 性 时 , 系统
l n n u e y t m tb l y y a d e s r d s se s i t ,wh c u r ne d g o e o ma c f a a l sr cu ec n rls se .F n l ,smu ain a i i h g a a te o d p r r n e o r b e tu tr o to y t ms i al f vi y i lt s o
维普资讯
第2 4卷第 l 2期 20 0 7年 l 月 2
计 算 机 应 用 研 究
Ap l a in Re e r h o mp t r p i t s a c fCo u e s c o
Vo . 4 No 1 12 . 2
De . 2 c 007
Abs r t: T a e nay e n e i n d a ca s o o us a . l tu tr o tolr o h nc ran d s rt —i y — t ac he p p ra l z d a d d sg e ls fr b tv ra e sr cu ec n rle sf rt e u e ti ice e tme s s i h t m. I h we ha h y t m tt s go ly u tmaey bo n d i he prs n e f dsu ba e a n e ti t I to e ts o d t tt e s se sae wa lbal li tl u de n t e e c o itr n e nd u c rany. nr — du e w wic i g s ra e wih te s se o t u in l. I p cfc ly d sg d f rdic ee tme si i g mo e c n r l c d a ne s th n u fc t h y t m u p tsg a s ts e ii al e ine s r t—i ld n d o to— o lr . On e t u s—ld n d o k plc es c he q a isii g mo e to a e,t y t pe o ma c e a ns n ii et h l n r he s sem r r n e b c me i e stv ot e p a tpaamee a ai nsa f t rv r to nd i e tr ld sur a c s Be a s h o r le e i n x ena it b n e . c u e te c ntolr d sg s. i f l o ie e h efc fb u a y l y r Exr p l t n me h d t ul c nsd r d t e fe to o nd r a e . y ta o ai t o o wa s d t tmaet e u e an v l fu e an ice etme s se su e oesi t h nc r i aueo nc r i ds r t i y t m. Two meho sei nae y t m h te n fe tv — t t t d lmi td s se c at r g efc ie i
离散时间系统变结构拟滑模控制改进算法
ei ec n co pi e odt no e i rt t ess m .T etjco fh s m cnrahtesi — xs n e dacm lh dcn io t s e t a s i f d c e— i t s h a t yo es t a c t h m ye re r t y e e h wc
ABS TRACT: h r dt n lds rt T e t i o a ic ee—t l i g mo e v ra l tu t r o to w i a e n t e r a hn w, a i i si n d aib e sr cu e c n rll sb s d o e c i g l me d a h a a d i i o n h tt i d sg d a i n tr a o a l n u h I h s p p r e si i g mo e v r l t cu e n t sfu d ta h s e in ie s o e s n b e e o g . n t i a e ,a n w l n d a a e sr t r d i b u c n r l lo tm f h ic ee—t y tm sp e e td o t g r h o e d s rt oa i t i s se i r s n e .B s d o h xsi gr s ae e u t ,t ep o o e lo me a e n t ee it e e r h r s l n s h r p s d ag — r h i p o e e q a i l ig mo e c n r 1 T e r t a n lss s o s t a h rp s d ag r h s t f s t e i m m r v st u s —si n d o to. h o ei la ay i h w h tt e p o e o i m a i i h t h d c o l t se
基于快速输出采样的MIMO离散系统变结构控制

关键 词 : 离散 时间 系统 ;快 速输 出采 样 ;变结构控 制
中图分类号 :P7 T 23 文献 标识码 : A 文章 编号 : 0 — 4 X 20 )3 0 9 — 4 1 7 49 (06 0— 26 0 0
Va i b e sr c u e c n r lf r M I O i c e e tm e s se s ra l t u t r o t o o M d s r t —i y t m
A s a tA dsrt vr be t c r o t l s g h O (at up t a l g fe b c c nq ei bt c : i e a a l s t ecnr i eF S fs otu mpi ) ed akt h iu r c e i r u u ou n t s n e s peetdf ls o MO( l— p t l— tu )d ceet n a ytm cu igb u d d rsne r c s f o a a MI muti u to p t i rt—mel erss si ldn o n e in mu i u s i i e n
( O )设 计 了离散 变结构控 制 器 , FS, 并给 出 了确 定控 制 器参 数 的 方 法 , 未知 扰 动 的界 已知 但 不要 且 求满足 匹配条 件 。理论 分析 表 明 , 设计 的控 制 器能保证 闭环 系统 是有界 稳 定 的 , 需利 用 系统 的 所 无 状 态作 为反馈 而仅 利 用输 出采样 来设 计控 制 器 , 因而 具有 较 强 的 实用 性且 易 于 实现 。通 过仿 真验
许建 强 , 陈树 中
(. 1华东师范大学 计算 机系 上海 2 0 6 ; . 00 2 2 上海应用技术学院 数理教学部 , 上海 20 3 ) 0 2 3
离散控制系统的滑模控制方法
离散控制系统的滑模控制方法离散控制系统是指在时间上是离散的、状态空间为有限集合的动态系统。
滑模控制方法是一种有效的控制策略,可在控制系统中实现稳定、快速、鲁棒性强的控制效果。
本文将介绍离散控制系统中的滑模控制方法及其应用。
一、滑模控制方法的基本原理滑模控制方法是在给定控制系统的状态空间中引入一个滑模面,通过滑模面的动态变化实现对状态的控制。
滑模面具有两个重要的性质:1) 快速接近系统状态;2) 对模型误差和外部干扰具有鲁棒性。
滑模控制方法的基本原理可以归纳为以下几个步骤:1. 系统建模:根据离散控制系统的特性和控制要求,建立系统的数学模型;2. 设计滑模面:选择适当的滑模面函数,并确定滑模面的参数;3. 滑模控制律设计:根据系统模型和滑模面函数,设计滑模控制律;4. 系统仿真与实验:进行系统仿真与实验验证,评估滑模控制方法的性能。
二、离散控制系统的滑模控制方法的应用滑模控制方法在离散控制系统中具有广泛的应用。
以下是几个常见的应用领域:1. 电力系统中的滑模控制:滑模控制方法可以用于电力系统中的电压控制、频率控制等应用。
通过设计滑模面和滑模控制律,可以实现电力系统的稳定运行和故障恢复。
2. 机械系统中的滑模控制:滑模控制方法可以应用于机械系统的位置控制、速度控制等。
通过引入滑模面和滑模控制律,可以实现机械系统的精确控制和运动规划。
3. 通信系统中的滑模控制:滑模控制方法可以应用于通信系统的信号恢复、抗干扰等。
通过设计合适的滑模面和滑模控制律,可以实现通信系统的稳定传输和高质量的信号恢复。
4. 汽车控制系统中的滑模控制:滑模控制方法可以应用于汽车控制系统的车辆稳定性控制、防抱死制动系统等。
通过设计适当的滑模面和滑模控制律,可以实现汽车的安全驾驶和提高行驶性能。
三、滑模控制方法的优缺点滑模控制方法具有以下优点:1. 鲁棒性强:滑模控制方法对参数变化和外部干扰具有较强的鲁棒性,可以保持控制系统的稳定性和性能;2. 快速响应:滑模控制方法能够通过滑模面的快速调节,实现对系统状态的快速响应和精确控制;3. 易于实现:滑模控制方法的实现相对简单,不需要过多的计算和参数调整。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘 要 :讨 论 了传 统 幂 次 趋 近律 的 缺 点 ,推 导 出 一 种 新 的离 散 趋 近 律 ,该 趋 近 律 弥 补 了单 纯 幂 次 趋 近 律 在 离 散 系 统 使 用 中的 不 足 ,并 利 用 它设 计 了 一 种 新 的 离 散 控 制 器 。该 变 结 构 控 制 系 统 ,可 保 证 系 统 运 动 最 终 趋 于 零 点 ,
l w, i i oun h t h y t m ha t rng i de r a e nd a t r a hi s e s ke . mul ton a d a t sf d t a t e s s e c t e i s c e s d a f s e c ng pe d i pt Si ai n a l s s r s ls bo h s o t t t e e f c i e e s a e s b lt he p o s d m e ho na y i e u t t h w ha h f e tv n s nd f a i iiy oft r po e t d, wh c a ke i h c n ma t y t m e p c tnu t nd e i na e s s e c t e i g e f c i e y, a n u e t y t m s he s s e k e on i iy a lmi t y t m ha t rn f e tv l nd e s r he s s e a ympt i otc s a iiy t b lt .
并 有 降 低 抖 振 和 保 持 快 速 趋 近 的 动 态 品 质 。对 该 离 散 趋 近 律 的 抖 振 进 行 了 分 析 和 仿 真 实 验 研 究 ,分 析 和 仿 真 结
果 表 明 该 方 法 能 保 证 系统 状 态 在趋 近 过 程 中 的连 续 性 ,能 有 效 地 减 小 系 统 抖 振 ,并 能 保 证 系统 渐 近 稳 定 。
Ab t a t Sh t o i s o he po r e c ng l w wa d s us e An m pr v d dic e e e c i l w i sr c : or c m ng f t we r a hi a s ic s d. i o e s r t r a h ng a s dd e e uc d, whih ma s u he de ii n y i he d s r t y t m s d o i l o r r a hi a , a c ke p t fce c n t i c e e s s e ba e n sng e p we e c ng lw nd a ne dic e e va i bl t u t r c nt o l r s bt i d. e a i b e s r t r on r l y t m d sgne y w s r t ra e s r c u e o r le i o a ne Th v ra l t uc u e c t o s s e ei db
关 键 词 :变 结 构 控 制 ;趋 近律 ;抖 振 ;离 散 系 统 中图 分 类 号 :T 7 P23 文 献 标 识 码 :A 文 章 编 号 :0 3 — 1 5 ( 0 0 0 —2 2 —0 4 8 1 7 2 1) 8 1 7 5
A e s i i — o e v r a l t u t r o t o e ho o s r t y t m n w ld ng m d a i b e s r c u e c n r lm t d f r dic e e s s e
u i g t s n w o r le a a ua l pp oa h t e o s n hi e c nt o l r c n gr d ly a r c o z r .By a a y i g c a t rng o he dic e e r a hi g n lsn h te i ft s rt e c n
Z HOU u xa 。 LIQia J n io ’ n, LIYu e
( h o f I f r to n o to g n e i g,L a nn h h a Un v riy,Fu h n 1 3 0 ,Lio i g,C i a Sc o l n o ma ina d C n r lEn i ern o i o ig S iu ie st su 10 1 ann hn )
第6 1卷
第 8期
化
工 学
报
V o1 1 NO. .6 8
Au gus 201 t 0
21 0 0年 8月
CI ESC J u n l o r a
一
种 新 的 离 散 系 统 变 结 构 控 制 i 石 油 化 工 大 学 信 息 与控 制 工 程 学 院 ,辽 宁 抚 顺 13 0 ) I宁 1 0 1
K e r : v ra e s r c u e c nt o ;r a hi a ; c a t rng;dic e e s s e y wo ds a ibl t u t r o r l e c ng lw h te i s r t y t m
士
口
点使 得变 结构 控制 具有 响 应快 速 、无需 系统 在 辨 线 识 、物理 实现 简单 等优 点r ,特 别适 用于 参数 变 1 ] 时