建立机电一体化模型的方法
浅谈机电一体化设计

浅谈机电一体化设计【摘要】科学技术的发展促进了不同领域的交叉和渗透,带来了工程领域的技术革命和变革。
在机械工程领域,微电子技术和计算机技术的迅猛发展以及机电一体化向机械工业的渗透,正在引起机械工程技术结构、产品配置、功能配置、生产方式、管理体制等方面的变革。
机械工业发生重大变化,使工业生产由“机械电气化”发展到“机电一体化”的发展阶段。
在此基础上,本文对机电一体化设计进行了分析。
关键词:机电一体化;关键技术;设计引言新形势下,国内工业生产实现了多项重大创新,过去单一技术的应用形式逐渐发生变化。
通过不同技术的不断融合,提高了相应技术的适用性。
实现了机械制造技术、计算机电子技术、信息网络技术的有机结合,并有效应用于工业生产。
控制系统是机电一体化的心脏,可进行数据处理和自动控制,并可通过计算机接口与外部设备连接,保证机电一体化系统各模块的可靠运行。
一、机电一体化概述1.1概念机电控制系统是指在工作和操作过程中将一系列相关的操作技术联系起来,有效地固定特定的装置来控制生产过程的动作,有效地控制工作生产,完成生产工作。
在系统形成过程中,融合了互联网技术、网络通信技术、电力技术等大量技术手段,不断完善机电控制系统,最终应用于实际生产工作,指导相关工作各部分之间的协调,实现技术之间的协调。
兼容共存。
机电控制系统的改进和发展,大大提高了人类的工作效率,同时也大大提高了企业发展的利润。
例如,如果将机电控制系统的远程控制系统应用到实际工作中,工作人员只需使用计算机就可以实现对生产工作的远程控制。
控制和节省人力管理时间,提高企业生产效率。
在实际工作中,远程操作主要分为两种,一种是维护型远程操作系统,可以监控和管理生产工作,另一种是人机对话控制系统,可以实现人机交互。
管理。
也就是说,科技的发展是决定行业发展的重要因素,只有通过科技的创新和发展,才能达到预期的效果。
机电一体化以科技创新为导向,将不同的技术结合起来,形成一个集成的控制系统。
机电一体化系统设计 学习指南
机电一体化系统设计学习指南一、理论教学第一章绪论[教学目的与要求]:1.掌握机电一体化的基本涵义。
2.掌握机电一体化系统及其组成。
3.了解机电一体化控制系统。
[本章主要内容]:1.1 什么是机电一体化?1.2 机电一体化实例—机器人介绍1.3 机电一体化系统基本组成1.4 机电一体化设计方法[本章重点]:1.机电一体化系统基本概念2.机电一体化系统基本组成[本章难点]:1.机电一体化系统基本组成第二章机电一体化系统总体设计[教学目的与要求]:1.了解机电一体化系统的总体设计方法2.掌握机电一体化产品的工程路线3.掌握几种典型机电一体化装置的基本组成[本章主要内容]:2.1 机电一体化产品设计过程2.2 机电一体化系统设计方法2.3 机电一体化产品设计实例[本章重点]:1.机电一体化总体设计的内容及方法2.典型机电装置的系统组成以及软、硬件结构[本章难点]:1.机电一体化系统设计的方法2.典型机电一体化装置数控机床或工业机器人的基本组成及设计方法第三章传感检测系统[教学目的与要求]:1.了解传感检测系统的基本组成和传感器的基本评价指标。
2.掌握机电一体化系统中常用传感器的基本原理与适用场合。
3.了解传感检测系统中常用信号预处理技术的基本原理。
[本章主要内容]:3.1 检测的基本概念3.2 传感器概述3.3 常见传感器原理及应用3.4 信号处理[本章重点]:1.各类传感器的工作原理2.传感器的功用和特性3.信号调理电路(滤波、相关、调制、解调)4.信号变换技术(传感器接口电路、放大电路、模数转换、数模转换)[本章难点]:1.各类传感器的工作原理2.传感器的功用和特性3.信号调理电路(滤波、相关、调制、解调)第四章机械系统设计[教学目的与要求]:1.掌握机电一体化系统中传动机构的种类、特点、基本要求。
2.了解常用工业机器人的基本构型。
3.掌握机电一体化系统常用精密传动机构的基本原理与设计方法。
[本章主要内容]:4.1 机电一体化系统典型机构4.2 机器人机构4.3 精密齿轮传动4.4 同步带传动4.5 滚珠丝杠传动4.6 导轨设计4.7 机械系统设计综合应用实例[本章重点]:1.滚珠丝杠副传动机构[本章难点]:1.传动机构的设计方法2.滚珠丝杠副传动机构3.谐波齿轮传动第五章伺服驱动系统[教学目的与要求]:1.了解伺服系统的一般组成、分类和基本组成形式。
机电一体化(机电一体化系统建模与分析)
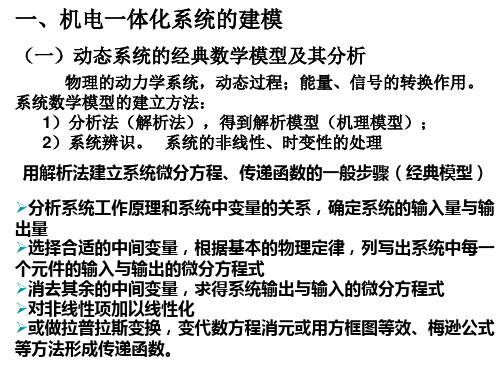
(一)动态系统的经典数学模型及其分析
物理的动力学系统,动态过程;能量、信号的转换作用。 系统数学模型的建立方法:
1)分析法(解析法),得到解析模型(机理模型); 2)系统辨识。 系统的非线性、时变性的处理
用解析法建立系统微分方程、传递函数的一般步骤(经典模型)
➢分析系统工作原理和系统中变量的关系,确定系统的输入量与输 出量 ➢选择合适的中间变量,根据基本的物理定律,列写出系统中每一 个元件的输入与输出的微分方程式 ➢消去其余的中间变量,求得系统输出与输入的微分方程式 ➢对非线性项加以线性化 ➢或做拉普拉斯变换,变代数方程消元或用方框图等效、梅逊公式 等方法形成传递函数。
电气网络
(a)R-C电路1
(b)R-C电路2 R、C换位
(c)R-L-C电路
(d)R-C滤波网络
以(d)为例说明
I1sUr sR1Uc1s,I2sUc1sR2Ucs Uc1sI1sC1SI2s ,UcsC12SI2s
负载效应
机械网络 (机械振动基础)
单自由度系统
c
md2 dyt2 (t)cdyd(tt)ky(t)F(t)
状态变量的个数一般等于系统所包含的独立储能元件 的数目。一个n阶系统有n个独立的状态变量,为状态的最 大线性无关组,或称最小变量组。选择不唯一,一般取系统 中易于测量观测的量作状态变量。
前述的M-C-K系统的状态空间表达式即为: R-L-C系统的状态空间表达式即为:
状态空间表达式为现代控制理论的基本模型!同时也是动力学系 统研究的一种重要模型。 现代控制理论与经典控制理论特性的比较:
三自由度系统及其固有模态振型
连续体振动系统 均匀简支梁:
简支梁的前三阶主振型可形如下图所示:
机电一体化技术专业建设方案

机电一体化技术专业建设方案
一、建设宗旨
本次的专业建设的宗旨,是打造一支具有科学素养、专业技能、学习
能力强、创新能力出色的精英团队,带领学生走向自主创新之路,能够满
足社会对此专业人才的需求。
二、建设目标
1、建立专业知识结构的规范化体系,使学生获得紧密、完整、权威
的专业知识和理论技术;
2、建立机械电子集成技术专业课程体系,以实践为基础,提高学生
的实践能力;
3、夯实专业基础理论,强化专业实践,围绕机械电子集成技术,拓
展学科边界,提升学科竞争力;
4、振兴传统教学模式,积极探索专业教学新模式,以类似工程研究
的方式融入理论和实践,发展新的教学模式;
5、丰富机械电子集成技术方面的教学资源,建立与专业相关的实验室,并配备理想的实验仪器仪表,以便更好地推动专业的发展。
三、建设内容
1、强化理论知识,加强教学科研。
加强教材和课程教学体系的研究,优化和完善“工程数学”、“机械原理”、“机械电子集成技术”等核心
课程的教学内容,通过系统、权威的教学指导,确保存与专业核心能力相
匹配的教学质量,形成专属于本专业的实践性教学体系,提高教学质量;。
机电一体化系统的现代设计方法
机电一体化系统的现代设计方法摘要:机电一体化系统的现代设计方法主要有可靠性设计、优化设计、反求设计、绿色设计、虚拟设计等。
本论文主要介绍了可靠性设计方法和优化设计方法。
可靠性设计包括了很广的内容,可以说在满足产品功能,成本等要求的前提下一切使产品可靠运行的设计都称之为可靠性设计。
优化设计是指将优化技术应用于设计过程,最终获得比较合理的设计参数,优化设计的方法目前已比较成熟,各种计算机程序能解决不同特点的工程问题。
关键词:机电一体化;现代设计方法;可靠性设计;优化设计。
一、引言随着社会的发展和科学技术的进步,使人们对设计的要求发展到了一个新的阶段,具体表现为设计对象由单机走向系统、设计要求由单目标走向多目标、设计所涉及的领域由单一领域走向多个领域、承担设计的工作人员从单人走向小组甚至大的群体、产品设计由自由发展走向有计划的开展。
与人们对设计的要求相比现阶段的设计确实是落后的,主要表现为:对客观设计的研究不够,尚未很好的掌握设计中的客观规律;当前设计的优劣主要取决于设计者的经验;设计生产率较低;设计进度与质量不能很好控制;实际手段与设计方法有待改进;尚未形成能被大家接受,能有效指导设计实践的系统设计理论。
面对这种形势,唯一的解决方法就是设计必须科学化。
这就意味着要科学的阐述客观设计过程及本质,分析与设计有关的领域及其地位,在此基础上科学的安排设计进程,使用科学的方法和手段进行设计工作,同时也要求设计人员不仅有丰富的专业知识,而且要掌握先进的设计理论、设计方法及设计手段,科学地进行设计工作,这样才能及时得到符合要求的产品。
二、机电一体化系统的现代设计方法概述机电一体化系统的现代设计方法是以设计产品为目标的一个总的知识群体的总称。
它运用了系统工程,实行人、机、环境系统一体化设计,使设计思想、设计进程、设计组织更合理化、现代化,大力采用许多动态分析方法,使问题分析动态化,实际进程、设计方案和数据的选择更为优化,计算、绘图等计算机化。
机电一体化系统设计
1、先进制造技术
先进制造技术(AMT-Advanced Manufacturing Technology)先进制造 技术是传统制造技术不断吸收机械、电子、信息、材料、能源和现代管理 等方面的成果,并将其综合应用于产品设计、制造、检测、管理、销售、 使用Байду номын сангаас服务的制造全过程,以实现优质、高效、低耗、清洁、灵活的生产, 并取得理想技术经济效果的制造技术的总称。
系统的五个子系统及其功能
• 1 计算机(微机) • 2 执行元件 • 3 机构 • 4 传感器 • 5 动力源
控制功能 操作功能 构造功能 检测功能 动力功能
2、机电一体化相关技术
机械技术、微电子技术、信息技术、 控制技术、传感器技术、驱动技术、 计算机技术、软件技术
等多种学科的技术融合在一起,紧密结合在一起。
机电一体化系统设计步骤:
• 1明确任务 • 2调研 • 3方案拟定(设计) • 4机械部件设计 • 5电气控制硬件设计 • 6控制软件设计 • 7组织生产、调试 • 8改进设计 • 9整理资料
机电一体化机械系统(特点)要求
• 1低摩擦阻力的传动部件和导向支承部件。 • 2缩短传动链,提高传动与支承刚度。 • 3最佳传动比,减少系统等效转动惯量,提高加
• 1)单推一单推式 • 2)双推一双推式 • 3)双推一简支式 • 4)双推一自由式
1)单推一单推式
• 止推轴承分别装在滚珠丝杠的两端并施加预紧 力。其特点是轴向刚度较高,预拉伸安装时, 预紧力较大,但轴承寿命比双推一双推式低。
2)双推一双推式
• 两端分别安装止推轴承与深沟球轴承的组合,并施加 预紧力,其轴向刚度最高。该方式适合于高刚度、高 转速、高精度的精密丝杠传动系统。但随温度的升高 会使丝杠的预紧力增大,易造成两端支承的预紧力不 对称。
机电一体化系统的建模与仿真技术研究

机电一体化系统的建模与仿真技术研究机电一体化系统是由机械、电子、控制、软件等多个领域组成的智能系统,在现代工业领域中得到了越来越广泛的应用。
机电一体化系统具有高度的智能化、机动化和自动化特点,使现代机械设备不断地朝着高速度、高精度、高质量和高效能的方向发展,成为生产力的重要支撑。
机电一体化系统的建模与仿真技术是现代化机械设计的重要手段之一,其目的是通过计算机仿真来验证机械系统的设计和功能,从而提高机械系统的可靠性和性能。
机电一体化系统的建模与仿真技术涉及到机械、电子、控制、软件等多个领域,需要采用多学科的知识和技术来解决问题。
机电一体化系统的建模方法主要有物理建模、系统建模和行为建模三种。
物理建模主要是通过解析方法或模型法来描述、建立机械系统的物理模型,即将系统模型化为组成其系统的基本部件,通过连接及约束关系组成完整的系统模型。
系统建模是将机械系统分解为各个部件,建立系统的框图,并通过框图来描述各个部件之间的关系和信号传递。
行为建模是通过对系统的运动规律、逻辑关系和控制策略等进行描述来建立系统的行为模型。
机电一体化系统的仿真方法主要有数学仿真、逻辑仿真和动态仿真三种。
数学仿真是运用计算机数值计算的方法,用算法对模型进行数学求解,从而得出系统的运行情况。
逻辑仿真是根据系统的逻辑关系和控制策略建立系统的逻辑模型,通过模拟系统的控制过程来验证系统的控制能力。
动态仿真是将机械系统的动态运动、工作过程进行全过程的仿真模拟,通过动态仿真来验证系统的性能。
在机电一体化系统的建模与仿真技术中,多学科的知识和技术是不可或缺的。
机械设计工程师需要在设计机械系统时掌握机械、材料、力学等相关知识,通过物理建模建立机械系统的物理模型,并通过计算机进行数学仿真和动态仿真。
电子工程师需要掌握电子、电路、信号等知识,通过逻辑建模建立系统的逻辑模型,并通过逻辑仿真验证系统的控制策略和控制能力。
控制工程师需要掌握控制算法、控制方法等知识,通过行为建模建立系统的行为模型,并通过数学仿真和动态仿真验证系统的运行效果。
机电一体化系统的建模与仿真

(1)机理模型 由于实际的对象通常都比较复杂,难以用数学方法予以精
确地描述,因此在确定机理模型的结构和参数时,首先需提出 一系列合理的假定,这些假定应不致于造成模型与实际对象的 严重误差,且有利于简化所得到的模型。然后,基于所提出的 假设条件,通过分析,列出被控对象运动规律方程式。最后, 建立方程的边界条件,将边界条件与方程结合起来,构成被控 对象的基本模型。
仿真系统可以采用面向对象的程序设计语言自建,也可以 购买商业仿真工作包。
利用商业工具包中的标准库模型可以很快地进行简单群体 系统的仿真。本小节就以SIMULINK仿真软件为例。
(1) SIMULINK仿真软件简介 SIMULINK是MATLAB里的工具箱之一,主要功能是实现动 态系统建模、仿真与分析;SIMULINK提供了一种图形化的 交互环境,只需用鼠标拖动的方法,便能迅速地建立起系统框 图模型,并在此基础上对系统进行仿真分析和改进设计。 创建模型及进行仿真运行。
为便于用户使用,SIMULINK可提供9类基本模块库和 许多专业模块子集。考虑到一般机电一体化主要分析连续控制 系统,这里仅介绍其中的连续系统模块库(Continuous)、系 统输入模块库(Sourses)和系统输出模块库(Sinks)。
①连续系统模块库(Continuous) 连续系统模块库(Continuous)以及其中各模块的功能如图74及表7-1所示。
另一种方法是实验法,即采用某些检测仪器,在现场对控 制系统加入某种特定信号,对输出响应进行测量和分析,得到 实验数据,列出输入量和输出量之间的离散关系,采用适当的 数值分析方法建立系统的数学模型,此方法常用于解决复杂的 控制系统。
分析法建立起来的数学模型又被称为机理模型。机理模型 可反映被控对像的本质,有较大范围的适应性,所以在建立数 学模型时,
机电一体化系统的建模与仿真
机电一体化系统的建模与仿真机电一体化系统是近年来工业自动化发展的一个重要方向,它将机械、电气、电子、计算机等多个学科有机结合,实现了产品的智能化和高效化。
在机电一体化系统的设计和开发过程中,建模与仿真是非常关键的一环。
本文将探讨机电一体化系统的建模与仿真的重要性、方法和应用。
一、机电一体化系统建模的重要性1. 减少开发成本和时间:通过建模与仿真,可以在产品实际制造之前发现问题和缺陷,减少开发过程中的试错成本和时间。
同时,可以在虚拟环境中对系统进行优化,提高产品的性能和质量。
2. 提高系统可靠性:通过建模与仿真,可以深入分析系统的运行过程,预测出潜在的故障和问题,并进行针对性的优化。
这样可以提高系统的可靠性和稳定性,减少故障率和维修成本。
3. 优化系统性能:建模与仿真可以帮助工程师在设计阶段进行多种方案的比较和评估,找出最优解决方案。
通过对系统进行仿真和测试,可以预测系统在不同工况下的性能,并进行优化调整,以实现更好的工作效果。
二、机电一体化系统建模与仿真的方法1. 建模方法(1)物理模型:通过对机电一体化系统的结构、元件和工作原理进行建模,可以快速构建一个具有物理实际意义的模型。
采用物理模型可以更好地反映系统的实际情况,但是建模过程相对较复杂。
(2)数据驱动模型:通过收集和分析大量的实验数据,利用统计学和机器学习等方法建立数学模型。
数据驱动模型可以根据实际数据自动调整和更新,适用于一些复杂的非线性系统。
2. 仿真方法(1)数学仿真:利用计算机进行大规模的数值计算,对系统进行仿真模拟。
数学仿真可以基于系统的物理模型和数学模型,通过输入不同的参数和条件,模拟系统在不同工况下的运行状态,预测系统的性能指标。
(2)软件仿真:通过专门的软件工具,如MATLAB、Simulink等进行系统建模和仿真。
这些软件提供了丰富的模型库和仿真环境,可以方便地进行建模和仿真分析。
同时,软件仿真还可以与物理实验相结合,进行混合仿真,提高仿真的准确性。
选择题试题库

选择题试题库第1章机电一体化的基本概念1、对于机电一体化系统的涵义,至今还有不同的认识。
但对机电一体化的本质特性认为是一个①计算机系统②机械系统③传感系统④电气系统2、接口有三个基本功能,它们是①变换、放大、传递②变换、放大、转换③变换、放大、控制④变换、放大、处理3、机电一体化技术是各种技术相互渗透的结果,下列技术不属于其主要相关技术的是①机械技术②检测传感技术③自动控制技术④多媒体技术4、机电一体化系统由许多要素或子系统组成,各子系统之间要能顺利地进行物质、能量和信息的传递和交换,必须在各要素或子系统的相接处具备一定的连接部件,这个连接部件就称为①传感检测单元②执行单元③驱动单元④接口5、机电一体化技术的发展前景应从如下方面考虑,说法错误的是①从性能上②从功能上③从层次上④从高技术的水平上6、机电一体化技术是微电子技术向机械工业渗透过程中逐渐形成的一种综合技术。
是一门集机械技术、电子技术、信息技术、计算机及软件技术、自动控制技术及其他技术互相融合而成的多学科交叉的综合技术。
机电一体化的概念是哪国学者提出的?①中国②美国③德国④日本第2章精密机械传动与支承技术在机电一体化系统中的应用1、爬行是影响进给精度的主要因素。
为了提高进给精度,必须消除爬行现象,主要应采取措施,不正确的是①提高传动系统的刚度②尽量缩短传动链,减小传动件数和弹性变形量。
③减少摩擦力的变化④提高临界速度2、机电一体化进给传动系统,由于齿轮传动级数的增加,会使齿隙和静摩擦增加,传动效率降低,故传动级数一般不超过几级。
① 1 ② 2 ③ 3 ④ 43、机电一体化系统的惯量大,会使系统的固有频率下降,产生谐振;但系统的惯量增大也有利于①提高伺服精度②提高响应速度③扩大伺服带宽④改善低速爬行4、移动工作台的惯量折算到旋转丝杠上的转动惯量是①②③④5、齿轮传动比的分配中,遵循“前大后小”原则的是①最小等效转动惯量原则(小功率传动装置)②最小等效转动惯量原则(大功率传动装置)③质量最小原则(小功率传动装置)④质量最小原则(大功率传动装置)6、齿轮传动比的分配中,传动比分配的结果为各分传动比相等,其遵循的原则是①最小等效转动惯量原则(小功率传动装置)②最小等效转动惯量原则(大功率传动装置)③质量最小原则(小功率传动装置)④质量最小原则(大功率传动装置)7、消除间隙的齿轮传动机构中,下列调整法中能实现自动补偿的是①直齿圆柱偏心轴套②直齿圆柱锥度齿轮③直齿圆柱双片薄片齿轮错齿④斜齿圆柱轴向垫片8、滚珠丝杠副的轴向间隙调整和预紧方法中,广泛采用双螺母预紧方式,下列预紧法中最精密的是①双螺母垫片调隙式②双螺母螺纹调隙式③双螺母齿差调隙式9、同步带标记“800 DI H 300”,其中“800”表示①800mm ②长度代号为800 ③节线长度为800 mm10、谐波齿轮减速器的最大特点,下列说法错误的是①传动比大②承载能力小③传动精度高④齿侧间隙小11、滚珠丝杠副轴向间隙调整与预紧方案中,便于调整且精度最高的方案是A. 双螺母螺纹预紧B. 双螺母齿差预紧C. 双螺母垫片预紧12、滚珠的工作圈(或列)数由试验可知:第一、第二和第三圈(或列)分别承受轴向载荷的A. 20%、30%、50%B. 30%、20%、50%C. 50%、30%、20%13、数控机床要求在什么进给运动下不爬行,有高的灵敏度。
机电一体化装备数字孪生机理模型构建准则

机电一体化装备数字孪生机理模型构建准则To establish criteria for constructing a digital twin model of mechatronic integrated equipmentMechatronic integrated equipment refers to the integration of mechanical, electrical, and computer systems in modern industrial machinery. With the rapid development of information technology and industrial automation, the concept of digital twins has gained increasing popularity. The digital twin is a virtual replica of a physical product or process. It allows real-time monitoring, analysis, and optimization of equipment performance.However, constructing an effective digital twin model for mechatronic integrated equipment requires following certain criteria:1. Accurate Representation: The digital twin model should accurately represent the physical characteristics and behavior of the mechatronic integrated equipment. Thisincludes capturing all relevant parameters such as dimensions, material properties, kinematics, dynamics, and control algorithms.2. Multi-domain Integration: Mechatronic integrated equipment involves various domains such as mechanical engineering, electrical engineering, and computer science. The digital twin model should integrate these domains seamlessly to capture their interactions and interdependencies accurately. This can be achieved through multi-physics modeling and co-simulation techniques.3. Real-time Data Acquisition: To ensure accurate monitoring and control of mechatronic integrated equipment, real-time data acquisition is crucial. The digital twin should be capable of acquiring data from sensors installed on the physical equipment and updating its model accordingly.4. Model Validation: It is essential to validate the accuracy of the digital twin model by comparing its predictions with actual measurements from the physicalequipment. This will help identify discrepancies and improve the reliability of the model.5. Scalability: Mechatronic integrated equipment comes in various sizes and complexities. The digital twin model should be scalable to accommodate different types of equipment with varying degrees of complexity.6. Interoperability: The digital twin model should be compatible with existing industrial standards and protocols to facilitate seamless integration with other systems like supervisory control and data acquisition (SCADA) systems or enterprise resource planning (ERP) systems. This allows for comprehensive data exchange and collaborative decision-making.7. Security and Privacy: As the digital twin model involves transmitting and storing sensitive equipment data, ensuring security and privacy is of utmost importance. Robust encryption methods, access controls, and data anonymization techniques should be implemented to protect the integrity and confidentiality of the information.建立机电一体化装备数字孪生机理模型的准则在现代工业机械中,机电一体化装备指的是机械、电气和计算机系统的集成。
机电一体化系统的设计步骤
机电一体化系统的设计步骤机电一体化系统设计就像搭积木,但这个积木超级复杂又超酷。
一、需求分析。
这是第一步啦。
就好比你要盖房子,得先知道住的人有啥需求。
要是给小两口设计机电一体化系统,和给大工厂设计肯定不一样。
得了解这个系统是干啥用的,要达到啥功能。
比如说,是要一个能精确控制温度的设备呢,还是一个快速搬运东西的机械臂。
这一步就像侦探找线索,把各种需求都挖出来,越详细越好。
二、方案构思。
有了需求就开始想办法啦。
这时候就像厨师做菜,各种食材(技术、部件)在脑袋里组合。
是用液压传动好呢,还是电动的更合适。
就像你搭配衣服,要找最适合的风格。
要考虑系统的整体布局,各个部分怎么连接,是串联还是并联。
这个阶段可以脑洞大开,多画几个草图,把各种可能的方案都列出来,哪怕有些看起来很奇葩。
三、模型制作。
想好了方案就动手做个小模型呗。
这就像做个小手工,把想法变成实实在在能看到的东西。
可以用简单的材料先搭个架子,看看各个部分的配合是不是像想象中那么完美。
这个模型不一定要很精致,但要能体现出系统的主要结构和功能。
在这个过程中,可能会发现一些之前没想到的问题,比如说某个部件太大,装不下,或者某个连接的地方很别扭。
四、详细设计。
模型有了,问题也发现了,就开始详细设计。
这一步就像给房子画施工图,每个细节都不能放过。
要确定每个部件的具体尺寸、材料、性能参数。
比如说电机要用多大功率的,传感器的精度要多高。
这时候要参考很多资料,像个学霸一样去研究各种标准和规范。
而且要和不同的供应商联系,看看有没有合适的部件可以买,要是没有可能还得自己设计制造。
五、系统集成。
把各个精心设计的部件组合在一起就像拼拼图。
要保证它们之间能完美协作。
这时候要进行各种调试,就像给乐队调音一样。
看看系统整体的功能是不是达到了预期的要求。
如果有问题,就像医生看病一样,一点点排查是哪个部件出了毛病,是线路接错了,还是程序有bug。
六、测试优化。
最后就是测试优化啦。
让系统跑一跑,看看在各种情况下的表现。
机电一体化产品虚拟样机协同体系设计及其模型建构

机电一体化产品虚拟样机协同体系设计及其模型建构1. 引言1.1 背景介绍机电一体化产品是指将机械、电子、控制等多个领域的技术融合在一起,形成一个整体的产品系统。
随着科技的发展和对产品功能、质量、成本等方面要求的不断提高,机电一体化产品虚拟样机逐渐成为研究的焦点。
在传统的产品设计中,需要制造实物样机进行测试和验证,这不仅耗费时间和成本,而且会受到设计周期的限制。
而虚拟样机技术的出现,允许将产品设计和测试过程移至计算机平台,在虚拟环境中模拟产品的性能和行为。
这不仅提高了产品设计开发的效率,还可以减少实际样机制造所需的时间和成本,同时提高产品的质量和性能。
通过机电一体化产品虚拟样机协同体系设计,可以将不同领域的技术和资源有效整合,实现多学科协同合作,提高产品设计和研发的效率和质量。
对机电一体化产品虚拟样机协同体系设计及其模型建构的研究具有重要意义。
本文将围绕这一主题展开深入探讨。
1.2 研究意义机电一体化产品的发展已经成为当前工业生产的一个重要趋势,其涉及电气、机械、自动控制等多个领域的知识和技术。
而虚拟样机作为机电一体化产品设计与制造中的重要工具,能够有效地模拟产品的运行状态,预测产品性能及行为,并在产品设计阶段发现和解决问题,从而提高产品设计效率和质量。
协同体系设计作为虚拟样机的一种重要应用方式,能够有效整合不同领域的专业知识和资源,提高团队协作效率,加快产品设计和研发进程。
通过协同体系设计,不同领域的专家和工程师可以实现实时沟通和合作,共同解决设计和制造过程中的问题,确保产品的性能和质量达到预期目标。
机电一体化产品虚拟样机协同体系设计及其模型建构的研究具有重要的意义。
通过深入研究虚拟样机的概念、协同体系设计原理和模型建构方法,可以为机电一体化产品的设计与制造提供更加科学的方法和技术支持,推动机电一体化产品的创新与发展。
实验验证和应用展望将进一步验证研究成果的可行性和实用性,为未来研究方向提供依据。
机电一体机电一体化系统设计方法
7.3 优化设计
7.3.1 优化设计概念
优化设计:优化设计(optimization design)是将设计问题的物理模型转 化为数学模型,运用最优数学理论,选用适当的优化方法,以计算机为 手段求解数学模型,从而得出最佳设计方案的一种设计方法。产品的优 化设计是在规定的各种设计限制条件下,优选设计参数,使某项或几项 设计指标获得最优值。优化设计在机电一体化系统中主要应用于结构设 计与控制系统中。
确定性能指标:产品技术与性能指标包括功能性指标、经济性指标、 可靠性指标、安全性标等。
拟定开发计划:开发计划是为了实现决策,预先明确所追求的目标以 及相应的行动方案的活动,即为设定目标以及决定如何达成目标,指 明路线的过程。
9
7.2.2 机电一体系统开发工作
2.设计阶段
总体设计:总体设计也称为初步设计,是应用系统总体技术,从整体 目标出发,统一分析产品的性能要求及各组成单元的特性,选择最合 理的单元组合方案,实现机电一体化产品整体优化设计的过程。机电 一体化系统总体设计内容包括总体方案拟订、工作原理设计、功能模 块划分、技术方案评价等。
• 适应性设计:是指在工作原理和总体结构基本保持不变的情况下对现有产 品进行局部更改,或增设某种新部件,或用微电子技术代替原有的机械结 构,或为了进行微电子控制对机械结构进行局部修改,以改善产品的性能 和质量。例如,在内燃机上增加增压器以增大输出功率,增加节油器以节 约燃料,均属于适应性设计。
5
7.1.2 设计类型
11
7.2.2 机电一体系统开发工作
定型阶段:定型是产品在正式投产前的一个重要环节,产品定型阶段 主要任务是准备定型文件(设计图纸、软件清单、机械零部件清单、 电气元器件清单及调试记录),编写技术资料(设计说明书、使用说 明书等),组织产品鉴定等。批准定型投产的产品必须由技术标准、 工艺规程、装配图、零件图、工装图以及其他相关技术资料。
机电一体化系统设计机电一体化系统设计和分析方法
详细设计
概念设计
产品规划
形态学矩阵 模糊理论 知识方法维
方法维,是设计过程 的各种思维方法、工 作方法和涉及的相关 领域知识
时间维
时间维,描述按时间 排列的设计目标流程;
分 综评 决 析 合价 策
逻辑维
逻辑维,是解决问题的逻 辑步骤,是在设计的工作 流程中的每一个阶段内所 要进行的工作内容和遵循 的思维程序;
统的设计更为合理和完善。
机电产品设计开 发交互过程
新产品想法
机电产品设计和开发的实际过 程是一个交互过程,在概念设 计和细节设计过程中需要不断 地进行验证和修改。
需求
概念设计
细节设计
原型循环
设计
有效性
原型、实验和验证
实现
新产品需求改进
开发
回收
产品
维护
2.3.4机电系统的数学模型举例:
图示为电枢控制式直流电动机的工作原理图。图中电机线圈的电
数学仿真:对实际系统进行抽象,并将其特 性用数学关系加以描述而得到系统的数学 模型,对数学模型进行实验的过程称为数 学仿真。
优点:方便、灵活、经济。缺点:受限于系 统建模技术,即系统数学模型不易建立。
半实物仿真:将数学模型与物理模型甚至实 物联合起来进行实验。
系统仿真时模型所采用的时钟称为仿真时 钟,而实际动态系统的时钟称为实际时钟。 根据仿真时钟与实际时钟的比例关系,仿 真又分为实时、亚实时和超实时仿真三种。
机电一体化系统设计的类型
开发性设计(全新设计); 适应性设计(原理方案不变,仅对功
能及结构进行重新设计); 变参数设计(仅改变部分结构尺寸而
形成系列产品)
机电一体化系统设计原则
机电一体化设计要遵循产品的一般设计原则 (在保证产品目的功能、性能和使用寿命的前 提下,尽量降低成本),以计算机为辅助手段, 充分利用现代设计方法,以多功能化,节能化, 高效化满足市场要求。
机电一体化系统概念设计过程模型的研究

创 新 是 概 念 设 计 的灵 魂 。 这 里 的 创 新
▲ 图 1 机 电一 体 化 系 统 的子 系统 划 分
推 动 由 思 维 模 型 向计 算 模 型 的转 换 。
可 以 是 多 层 次 的 , 从 结 如
在 众 多 设 计 路 径 所 产 生 的 设 计 结 果 中 , 产 生 一 组 可 行 的 将
“ ” 案。 新 方
对 于 以完 成 工 艺 动 作 为 主 功 能 的 机 电 一 体 化 系 统 , 概 从
念设 计 的 需 要 出 发 , 根 据 其 广 义 功 能 原 理 来 进 行 划 分 。 它 可 主要 有 以 下 三 大特 点 :
计算模 型的转换 , 实现 计 算 机 辅 助 概 念 设 计 的 目标 。 关 键 词 : 电 一 体 化 系统 ; 念 设 计 ; 程模 型 机 概 过 中 图分 类 号 : H1 1 T 1 T 1 ; H1 2 文献标识码 : A 有所不同, 它 主 要 具 有 以 下 基 本 特
( )多 目标 性 ( l . jci ) 设 计 是 在 多 种 因 素 的 限 2 Mut o e t e : ib v
( )机 电一 体 化 系 统 是 由 计 算 机 进 行 信 息 处 理 和 控 制 1
的机 械 系 统 , 的 最 终 目的 是 实 现 机 械 运 动 和 动 作 。 它
制 和 约 束 下 进 行 的 , 中包 括 科 学 、 术 、 济 等 发 展 状 况 和 其 技 经 水平 的限制 , 包 括生 产 厂家所 提 出的特 定 的要求 和 条件 , 也 同 时 还 涉 及 环 境 、 会 等 因 素 。 这 些 限 制 和 要 求 构 成 了一 组 社
机电一体化装备数字孪生机理模型构建准则

机电一体化装备数字孪生机理模型构建准则在数字化洪流席卷现代工业的大背景下,机电一体化装备的数字孪生机理模型构建犹如一场精密机械与智能科技的华丽共舞,其准则的重要性不言而喻。
本文将深入探讨这一主题,带您领略这场融合实体与虚拟、现实与模拟的创新盛宴。
首先,“形神兼备”乃数字孪生机理模型构建的核心要义。
就如同雕刻一尊生动逼真的雕像,不仅需精细描绘装备的物理构造——“形”,即机械设备的几何尺寸、运动学特性等硬件属性;更需精准刻画装备的功能运作——“神”,即控制逻辑、动力学性能、故障模式等软件层面的行为表现。
二者相辅相成,缺一不可,方能孕育出一个既真实反映实物又具备深度学习和预测功能的数字孪生体。
其次,“虚实交融”是模型构建过程中的一大挑战也是创新亮点。
如何实现从“原子世界”到“比特世界”的无缝对接?这就要求我们在设计模型时,遵循“由表及里,由实至虚”的原则,利用传感器网络实时捕获并传输装备运行数据,通过大数据分析、云计算等技术手段,实现对实体装备动态行为的高精度复现与仿真。
这就好比一位看不见的魔术师,凭借一双洞察秋毫的慧眼和一支挥洒自如的智慧之笔,将实体设备的每一个细微动作都跃然于虚拟屏幕之上。
再者,“以终为始,迭代优化”是确保模型效能的关键路径。
在构建数字孪生机理模型的过程中,我们应秉持“步步为营,稳扎稳打”的态度,从预期应用场景出发,明确模型的构建目标与评价指标,然后通过反复试验、对比校核、持续优化的方式,不断提升模型的准确度和实用性。
这种螺旋式上升的过程,恰似攀登科学高峰的艰辛历程,虽然沿途荆棘丛生,但每一步的努力都将推动我们向着理想的目标迈进。
最后,“以人为本,协同创新”是驱动模型构建不断前行的重要引擎。
数字孪生机理模型并非孤立存在,而是深深植根于工程师们的智慧结晶与实践经验之中。
因此,在构建模型时,我们要充分发扬“群策群力,集思广益”的团队精神,鼓励跨学科交流与合作,共同攻克技术难题,让数字孪生技术真正成为赋能机电一体化装备升级转型的利器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
建立机电一体化模型的方法Bassam A. Hussein生产质量工程系,挪威科技大学(NTNU)特龙赫姆,挪威1997年12月3日摘要为了模拟机电一体化系统的物理和逻辑性能,本篇论文提出了一个基于利用多维数组的统一方法。
一个机电一体化系统模型包括两个相互作用的子模型。
一个子模型描述在物理系统中与能量流动有关的方面,另一个子模型描述在控制系统中与信息流动有关的方面。
基于建模方法的多维数组提供给我们一个在子系统中使用一个术语和相同建模形式的可能性。
使用相同形式的结果是机电一体化系统的仿真能够被执行通过使用一个仿真环境。
关键词:机械电子工程,系统,建模1.导言机电一体化系统包括机械工程和电子技术的协同综合,在设计方面的智能电脑控制,工业产品的制造和工序。
机电一体化系统的成分必须同时被设计,也就是说,通过每条规则强加在这个系统的约束必须在非常早的阶段被考虑到。
因此,合适的系统设计应该很大程度地依赖于模型的使用和贯穿在设计与原型阶段的仿真模拟。
在一个机电一体化系统的集成通过硬件成分的组合组成一个物理系统,通过信息加工系统的集成组成一个智能控制系统被执行。
那时机电一体化系统是基于控制系统到物理系统应用电脑的结果。
控制系统被设计来在正确的时间执行命令为了选择、加强和监督物理系统的行为。
唯一可能的方法来保证这些控制功能将在我们真正建造它之前保持整个系统在正确界限之内的行为。
为了创造一个考虑到被硬件、软件成分强加的约束真正的系统模型。
这意味着一个真正系统的模型必须是足够强有力地捕捉所有机电一体化系统的性能。
那包括动态的,静态的,离散的时间,逻辑的和真正系统的性能的成本。
我们相信一个任务不服从任何破碎的建模方法。
在这篇论文我们提出了一个统一的机电一体化系统的建模方法。
这个统一的方法利用几何学的物体或多维数组来明确地表达机电一体化系统的模型。
这个基于建模方法的多维数组为我们提供了对很多种类的系统使用相同形式的可能。
【2,3,4,9】使用相同形式的结果是机电一体化系统的模拟能够通过仅仅一个模拟环境被执行。
2.模型结构直观来讲,一个描述给定系统的动态行为不能够被用来调查相同系统的静态行为。
因此,为了熟知所有方面,我们需要很多模型,它们中的每一个都包括了这个真实系统的一些方面。
我们将会把机电一体化系统模型视为一系列连接着的子模型,每个子模型与一些可实现的方面相一致。
在这点上,连接着的项目被用来强调在子模型中变量的依赖性。
贯穿这个建模的过程,我们应该分辨以下概念,请见图1 。
分解:为了处理复杂的机电一体化系统,它们应该被分成若干个子系统。
这种分解用一种多级的方法执行,直到我们明白组成整个系统的基本成分。
这个原始的系统模型:是系统在断开状态时的一种描述。
当联系这些成分的纽带被移除后,它表达了在独立的成分中变量间的关系。
通过这个模型,我们隔离了在每个成分中一个特定的行为,静态的,动态的,等等。
两个局部的变量定义了一个给定成分的局部行为。
连接的系统模型:是考虑到外部约束后的对相同系统的一种描述。
在系统中内部的约束通过局部联系或直接相关的变量,也通过间接地有联系的系统的变量被给出。
连接着的系统模型与真实系统的真实结构是相似的。
应用的来源由于系统与其所处环境间的相互影响而聚集。
他们能够被视为强加在系统上的外部约束或者甚至是在系统成分中以存储的能量为形式的内在的约束。
3.应用举例思考一下,制造系统展现在图2中。
系统包括一个由直流发动机提供动力的钻孔主轴。
钻孔主轴向前馈入的请求通过一个液压的线形的促动器。
液压促动器由一个即时的液压泵提供动力。
在液压电路中体积的流动被一个伺服系统控制。
上述的制造系统有以下规格:钻孔主轴的位置被三个微型断路器感应。
断路器(B)表明钻孔主轴在后面的位置。
在后面的位置快速阶段阀将被打开为了允许一个快速地向前运动(F),信号(S)将打开主轴发动机。
断路器(M)表明钻孔主轴已抵达馈入位置。
在这个位置快速阶段阀将会被关掉为了开启一个被控的馈入向前运动。
这个运动被伺服系统调节。
断路器(€)表明钻孔主轴已经到达它的末位置。
在这个位置向后运动(R)将会开始,同时快速阶段阀将会被开启为了允许一个快速向后地运动。
它也指定在钻孔工作期间主轴发动机的转速应该保持在每分钟3000转,向前馈入速度在全负荷的情况下必须保持在2cm/sec。
我们的目标是使用多维数组为给定系统建立一个完整的模型。
在模型上执行必要的实验来验证规格是令人满意的。
3.1物理系统建模当建立物理系统模型的时候,我们关心建立处于系统内部的物理变量的演变。
分解的物理系统在图3中展示。
基本的物理成分组分成三个种类:广泛的电阻器,例如电阻器,机械阻尼和液压电阻器。
广泛的电容器,例如电容器,机械弹簧和液压水库。
广泛的感应器,例如电感应器,机械质量和液压感应器。
把物理系统分解成子系统再到基础的成分将会给我们提供在每个子系统内部的物理数量的演变的敏锐的洞察力,让步于更好地对模式和情况在每个子系统中能够达到的理解。
有这样的洞察力的优势将在一个局部控制系统的设计阶段变得可见。
建模可以被认为是与分解相反的程序。
区别在于,在分解中,我们把系统分成独立的物理实体,而在建模中,我们重新连接了这些物理实体的模型。
因此,建模可以被视为连接的程序。
在建模中,我们在本层次的底部开始,逐渐上移。
在每个阶段,我们从一个原始的系统模型传播到一个链接的系统模型。
在随后的阶段中,这个原始的系统模型将会通过前一阶段聚合连接的系统模型如图4所示建立起来。
在每一个子系统的底部水平,原始的系统模型将会通过利用统治方程或每个独立成分的基本法则建立起来。
基本法则,像牛顿定律或欧姆定律,描述了成分的局部行为。
与每个子系统的界线中内部约束相似的直接和间接的联系定义了从原始系统模型到已连接系统模型的转变。
因为像直流伺服电动机那样有线性联系的系统,内部约束由一个连接物体、高速物体(V)给出的。
高速物体是一个二维数组,数组里的行与原始系统(局部变量)的变量相一致,列与连接的系统(全部变量)的变量相一致。
因此,高速物体是从连接系统模型的全部变量到原始系统模型的局部变量的转换。
通过斜对地液压子系统和钻孔主轴聚合连接系统,物理模型建立起来。
建立物理系统模型需要一系列所有不同的代数方程【7】。
在一个情况空间形式,物理系统的行为由y=~(A,x,u,~)给出,在一系列首要的情况变量中,在一系列输入资源中,在真实或虚假的物理特定控制功能的情况过渡模型中。
3.2控制系统模型在一个控制算法被设计和实行之前,我们需要一个它所要求的性能或行为的描述。
一个精确、综合的控制系统的性能的数学模型能够通过使用逻辑符号被表达出来。
数学模型提供给我们揭示控制系统中的不一致和冲突及验证控制系统要求的设计规格的方法。
为了执行在问题描述中所有的控制功能,控制系统应该被分为三个子系统。
一个过程控制子系统,将会对开始、停止对不同的物理实体和两个连续的控制器的命令负责。
一个在液压子系统中对伺服系统的控制为了调节、馈入液压促动器向前的运动。
第二个对伺服电动机的控制器是为了调节转轴发动机的生硬的速度。
分解过程如图5所示。
每个子系统的功能通过一系列的逻辑争论或规则被描述出来。
这些逻辑争论的每个都能被视为能够分解成许多派系的逻辑成分的子系统。
这些成分能够简直是能假定真实或虚假状态的局部变量的任何事物(10)。
这些成分提出了非特异性的控制功能的原始系统模型。
建立控制系统模型的程序也将沿着层次向上移动,直到获得如图6所示的全部模型。
在原始系统模型中,局部变量间的联系通过三个连接词来定义。
在古典逻辑中,它们指的是基础的逻辑连接词。
基本逻辑连接词组包括:连接(AND),分离(OR)和否定(NOT)。
我们通过使用上述逻辑连接词聚集在原始系统的局部变量传播到连接的系统模型。
一个连接的子系统就是一个通过多维数组形式表达的逻辑争论的真实形式。
在那个数组里轴的数量应该和变量的数量相等,因此所有重复的轴必须通过捆绑的方法混合在一起。
连接的系统在通过连接各自独立的成分把内部约束强加在结构上之后表达所有可能的系统状态。
控制系统的行为能够通过S=f(p,i,n)形式提出来。
这是一系列由于和环境相互作用的外部约束的输入变量,这是通过多维数组形式表达的控制系统的过渡模型情况,一系列的输出变量。
指标(n)是时间指标的类似物,因为它指定了给定状态的顺序。
3.3整个系统的模型因为两个系统利用内部的不同的信号种类,直观来讲,在物理和控制系统中唯一可能的接口将会在外部取代,通过依靠有影响的资源环境。
在上述的制造系统,我们可以分辨物理和控制系统的两种接口。
离散的接口:当控制系统的目的是协调不同步的任务来满足系统需求时取代过程控制器。
例如,当一个事件由过程控制器提出的要求“开启主轴发动机”,主轴发动机开始旋转,旋转本身的进程由更低水平的控制器(连续的控制器)控制。
连续的接口:当控制系统的目的是在给定界限内保持物理系统的行为时,例如实施速度控制,局部的取代更低水平的控制计划。
这样合成的系统模型被认为是一个混合的系统模型。
识别混合系统的特征是它们合并了连续动态行为,ie,被有影响的管理的物理数量的进化,代数方程(y=f(A,x,u,r))被逻辑方程(S=f(p,i,n))管理的离散事件的动态行为。
一个完整的模型可以通过聚集物理系统模型和控制系统模型的简单接口获得。
接口将有两个简单的无记忆的绘图功能(a)和(p)【1】来组成。
第一个图(a)将控制器输出转化为一个即时的增值的输入到物理系统中,如下:u(i)=a(sn)。
第二个图(p)将物理系统输出转化为一系列的输入逻辑变量来控制系统,如下:i=p(y(r)),如图7所示。
我们迄今为止所获得的是通过使用数组建立一个一致、完整的机电一体化系统模型的数学描述来确定整个系统的性能。
在子模型中的接口通过使用建议的绘图功能尽可能简单的保持着。
4.模拟考虑一下整个系统在休息时和钻孔主轴在后面位置时,使用者仅仅按一下开启键就可以。
从断路器和物理系统的接口处的输入信号的组合将会使控制系统获得一个新的状态,最终一个新的输出逻辑变量生成。
输出信号的结合将会使钻孔主轴在快速阶段运动(不被控制的运动)中开始向前移动。
同时,主轴发动机将会打开,开始旋转。
然而,因为主轴发动机没有到达馈入位置,这个旋转速率将会通过伺服发动机控制算法保持不受影响。
主轴发动机生硬的转速模拟如图8所示。
从图8中我们可以知道,主轴发动机将会在约短暂的5秒过后获得一个即使的3171r.p.m.的旋转速率。
主轴发动机假定在主轴上零负模拟,这是因为钻孔主轴还没到达馈入位置。
控制系统的目标将是在全负载的情况下保持主轴发动机在3000r.p.m.。
线形速率和不同的液压促动器的压力的模拟如图9所示。