数字化PWM可逆直流调速系统MATLAB仿真
直流电机调速matlab仿真报告
直流电机调速matlab仿真报告以直流电机调速Matlab仿真报告为标题引言:直流电机是一种常见的电动机,广泛应用于工业、交通、家电等领域。
在实际应用中,电机的调速控制是一项关键技术,可以使电机在不同工况下实现恒定转速或变速运行。
本文将利用Matlab软件进行直流电机调速的仿真实验,旨在通过仿真结果分析不同调速控制策略的优劣,并提供一种基于Matlab的直流电机调速方法。
一、直流电机调速原理直流电机的调速原理基于电压与转速之间的关系。
电机的转速与输入电压成正比,即在给定电压下,电机转速可以通过调整电压大小来实现调速。
常用的直流电机调速方法有电压调速、电流调速和PWM调速等。
二、Matlab仿真实验设置本次仿真实验将以直流电机调速为目标,基于Matlab软件进行实验设置。
首先,需要建立电机的数学模型,包括电机的转速、电流和电压等参数。
其次,选择合适的调速控制策略,如PID控制、模糊控制或神经网络控制等。
最后,通过调节电压输入,观察电机的转速响应和稳定性。
三、PID控制调速实验1. 实验目的本实验旨在通过PID控制器对直流电机进行调速控制,并分析不同PID参数对控制效果的影响。
2. 实验步骤(1) 建立直流电机的数学模型;(2) 设计PID控制器,包括比例系数Kp、积分系数Ki和微分系数Kd;(3) 利用Matlab软件进行仿真,设定电机的目标转速和初始转速;(4) 通过调节PID参数,观察电机的转速响应和稳定性。
3. 实验结果与分析根据实验设置,我们分别对比了不同PID参数值下的电机转速响应曲线。
结果显示,在合适的PID参数设置下,电机能够实现快速响应和稳定控制。
但是,过大或过小的PID参数值都会导致转速超调或调速不稳定的问题。
四、模糊控制调速实验1. 实验目的本实验旨在通过模糊控制器对直流电机进行调速控制,并分析不同模糊规则和输入输出的影响。
2. 实验步骤(1) 建立直流电机的数学模型;(2) 设计模糊控制器,包括模糊规则、输入变量和输出变量;(3) 利用Matlab软件进行仿真,设定电机的目标转速和初始转速;(4) 通过调节模糊规则和输入输出变量,观察电机的转速响应和稳定性。
PWM脉宽直流调速系统设计及matlab仿真验证
PWM脉宽直流调速系统设计及matlab仿真验证————————————————————————————————作者:————————————————————————————————日期:目录1.MATLAB简介 (3)3系统设计及参数计算 (5)3.1系统总体设计 (5)3.1.1 H型双极式PWM原理 (5)3.1。
2双闭环调速系统结构图 (7)3.1。
3双闭环调速系统启动过程分析 (8)3。
2电流调节器设计及参数计算 (9)3。
3转速调节器设计及参数计算 (11)4 MATLAB仿真验证 (14)4.1稳定运行时电流环突然断线仿真分析 (14)参考文献 (19)PWM脉宽直流调速系统设计及matlab仿真验证1.MATLAB简介MATLAB是由美国mathworks公司发布的主要面对科学计算、可视化以及交互式程序设计的高科技计算环境。
它将数值分析、矩阵计算科学数据可视化以及非线性动态系统的建模和仿真等诸多强大功能集成在一个易于使用的视窗环境中,为科学研究、工程设计以及必须进行有效数值计算的众多科学提供了一种全面的解决方案,并在很大程度上摆脱了传统非交互式程序设计语言的编辑模式,代表了当今国际科学计算软件的先进水平。
[MATLAB和MATHEMATICA、MAPLE并称为三大数学软件。
它在数学类科技应用软件中在数值计算方面首屈一指。
MATLAB的基本数据单位是矩阵,它的指令表达式与数学、工程中常用的形式十分相似,故用MATLAB来解算问题要比用C,FORTRAN等语言完成相同的事情简捷得多,并且MATLAB也吸收了像MAPLE等软件的优点,使MATLAB成为一个强大的数学软件。
2 设计分析直流双闭环调速系统调节器包括转速调节器(ASR)和电流调节器(ACR),从而分别引入了转速负反馈和电流负反馈以调节转速和电流,二者之间实行串级连接.把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器UPE。
PWM脉宽调制直流调速系统设计及MATLAB仿真验证

PWM 脉宽调制直流调速系统设计及MATLAB 仿真验证第一章 系统概述1.1 设计目的1. 掌握转速,电流双闭环控制的双极式PWM 直流调速原理。
2. 掌握并熟练运用MATLAB 对系统进行仿真。
1.2 设计题目转速,电流双闭环控制的H 型双极式PWM 直流调速系统,已知:直流电动机:48, 3.7,200/min,nom nom nom U V I A n r ===允许过载倍数λ=2;时间常数:L T =0.015s ,m T =0.2s ;PWM 环节的放大倍数:S K =4.8,;电枢回路总电阻:R=3Ω;电枢电阻Ra=2Ω。
调节器输入输出电压**nm im U U ==10V.采用MATLAB 对双闭环系统进行仿真,绘制直流调速系统(Id=const )稳定运行时转速环突然断线(1、有ACR 限幅值;2、无ACR 限幅值)仿真框图,仿真得出启动转速,起动电流,直流电压Ud ,ASR,ACR 输出电压的波形。
并对结果进行分析。
1.3 设计内容1 简述设计题目及对题目的分析;2 简述双极式PWM 直流调速系统原理;3 简述电流环,转速环的控制原理;4 对电流环、转速环的参数进行计算选取;5 根据电流环、转速换的参数进行MATLAB 仿真;第二章 转速、电流双闭环式的双极式PWM 直流调速系统2.1 双极式PWM 调速原理可逆PWM 变换器主电路有多种形式,最常用的是桥式(亦称H 形)电路,如图2-1所示,电动机M 两端电压AB U 的极性随全控型电力电子器件的开关状态而改变。
图2-1 桥式可逆PWM 变换电路双极式控制可逆PWM 变换器的四个驱动电压的关系是:1423g g g g U U U U ==-=-。
在一个开关周期内,当0≤t<on t 时 ,AB S U U =,电枢电流id 沿回路1流通;当on t ≤t<T 时,驱动电压反号,id 沿回路2经二极管续流,AB S U U =-。
直流调速系统的MATLAB仿真(参考程序)

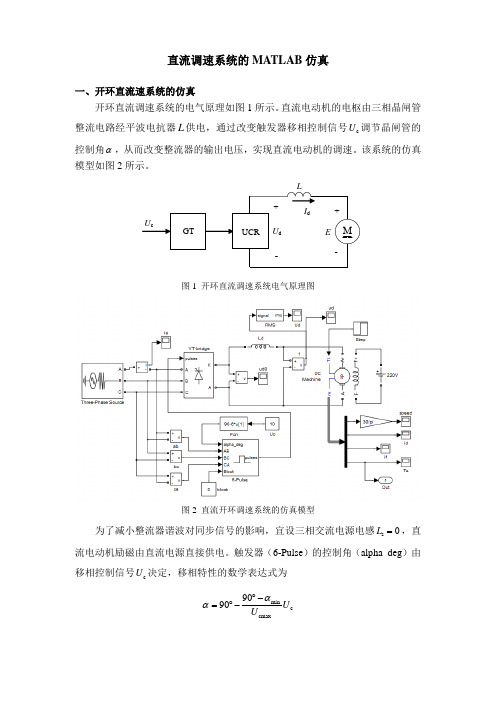
直流调速系统的MATLAB 仿真一、开环直流速系统的仿真开环直流调速系统的电气原理如图1所示。
直流电动机的电枢由三相晶闸管整流电路经平波电抗器L 供电,通过改变触发器移相控制信号c U 调节晶闸管的控制角α,从而改变整流器的输出电压,实现直流电动机的调速。
该系统的仿真模型如图2所示。
MU d+I dGTU cE +--UCR图1 开环直流调速系统电气原理图图2 直流开环调速系统的仿真模型为了减小整流器谐波对同步信号的影响,宜设三相交流电源电感s 0L =,直流电动机励磁由直流电源直接供电。
触发器(6-Pulse )的控制角(alpha_deg )由移相控制信号c U 决定,移相特性的数学表达式为minc cmax9090U U αα︒-=︒-在本模型中取min 30α=︒,cmax 10V U =,所以c 906U α=-。
在直流电动机的负载转矩输入端L T 用Step 模块设定加载时刻和加载转矩。
仿真算例1 已知一台四极直流电动机额定参数为N 220V U =,N 136A I =,N 1460r /min n =,a 0.2R =Ω,2222.5N m GD =⋅。
励磁电压f 220V U =,励磁电流f 1.5A I =。
采用三相桥式整流电路,设整流器内阻rec 0.3R =Ω。
平波电抗器d 20mH L =。
仿真该晶闸管-直流电动机开环调速系统,观察电动机在全压起动和起动后加额定负载时的电机转速n 、电磁转矩e T 、电枢电流d i 及电枢电压d u 的变化情况。
N 220V U =仿真步骤:1)绘制系统的仿真模型(图2)。
2)设置模块参数(表1) ① 供电电源电压N rec N 2min 2200.3136130(V)2.34cos 2.34cos30U R I U α++⨯==≈⨯︒② 电动机参数 励磁电阻:f f f 220146.7()1.5U R I ===Ω 励磁电感在恒定磁场控制时可取“0”。
基于PWM控制的直流电动机调速系统设计及MATLAB仿真

┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊摘要在电力拖动系统中,调节电压的直流调速是应用最广泛的一种调速方法,除了利用晶闸管整流器获得可调直流电压外,还可利用其它电力电子元件的可控性,采用脉宽调制技术,直接将恒定的直流电压调制成极性可变,大小可调的直流电压,用以实现直流电动机电枢两端电压的平滑调节,构成直流脉宽调速系统,随着电力电子器件的迅速发展,采用门极可关断晶体管GTO、全控电力晶体管GTR、P-MOSFET、绝缘栅晶体管IGBT等一些大功率全控型器件组成的晶体管脉冲调宽型开关放大器(Pulse Width Modulated),已逐步发展成熟,用途越来越广。
本文主要讨论了直流调速系统的基本概念,在此基础上系统地介绍了转速负反馈单闭环调速系统,转速电流负反馈双闭环调速系统的组成,工作原理,脉宽调速系统的原理和控制方法,介绍了直流脉宽调速系统的控制电路和系统构成。
最后应用MATLAB的Simulink,采用面向电气原理结构图的仿真技术,对直流脉宽调速系统进行了仿真分析。
关键词:调速,PWM控制,直流电动机,仿真┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊目录第一章引言1.1 直流调速系统简介 (5)1.2 PWM直流调速的研究背景和发展状况 (5)1.3 本设计的主要内容 (6)第二章直流电机调速系统2.1 直流电机调速系统的概述 (7)2.1.1 旋转变流机组直流电机调速系统 (7)2.1.2 静止式可控整流器调速系统 (7)2.1.3 直流斩波器或脉宽调速 (8)2.2 电机基本调速方法 (9)2.2.1 电枢串电阻调速 (9)2.2.2 弱磁调速 (9)2.2.3 调压调速 (10)2.3 转速控制的要求和调速指标 (10)2.4 闭环直流调速系统 (11)2.4.1单闭环直流调速系统 (11)2.4.2 转速电流双闭环调速系统 (14)2.4.2.1 双闭环系统的稳态结构图和静特性 (16)2.4.2.2 各变量的稳态工作点和稳态参数计算 (17)2.4.2.3 双闭环直流调速系统的启动过程分析 (18)2.4.2.4 转速和电流两个调节器的作用 (20)第三章PWM调制技术与PWM变换器3.1 PWM调制技术 (21)3.1.1 模拟式PWM控制 (21)3.1.2 数字式PWM控制 (22)3.2 PWM变换器 (23)3.2.1 简单的不可逆PWM变换器 (23)3.2.2 制动不可逆PWM变换器 (24)3.2.3 H型双极式PWM变换器 (26)第四章PWM直流电动机调速系统的设计4.1 PWM-M直流调速系统的控制电路 (28)4.2 系统设计方案的选择 (29)4.2.1主电路供电方案选择 (29)4.2.2主电路形式的选择 (30)4.2.3控制电路方案的选择 (32)4.3 直流脉宽调速系统的MATLAB仿真 (33)┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊4.3.1 引言 (33)4.3.2双闭环控制的脉宽调速系统的仿真模型 (33)4.3.3 系统的仿真、仿真结果的输出及结果分析 (36)总结 (39)参考文献 (40)┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊第一章引言1.1 直流调速系统简介调速系统包括直流调速系统和交流调速系统两大类。
双闭环可逆直流脉宽PWM调速系统设计及MATLAB仿真验证

双闭环可逆直流脉宽PWM调速系统设计及MATLAB仿真验证双闭环可逆直流脉宽调制(PWM)调速系统是一种常见的电机调速控制方案。
该系统通过两个闭环来实现电机的速度控制和电流控制,从而实现精准的调速效果。
本文将介绍双闭环可逆直流脉宽PWM调速系统的设计原理,并使用MATLAB进行仿真验证。
设计原理:该系统由以下几个主要部分组成:1.输入信号:输入信号一般是一个速度设定值,表示期望电机的转速。
该信号可以通过人机界面或其他控制系统输入。
2.速度控制环:速度控制环根据输入信号和反馈信号之间的差异来控制电机的转速。
常见的速度控制算法有比例控制、积分控制和微分控制。
3.脉宽调制器:脉宽调制器根据速度控制环输出的控制信号来生成PWM信号,控制电机的转速。
通常使用的脉宽调制算法有定时器计数法和比较器法。
4.电流控制环:电流控制环根据PWM信号和反馈信号之间的差异来控制电机的电流。
常见的电流控制算法有比例控制、积分控制和微分控制。
5.电机驱动器:电机驱动器将电流控制环输出的控制信号转换为电机驱动信号,驱动电机正常运转。
MATLAB仿真验证:为了验证双闭环可逆直流脉宽PWM调速系统的性能,可以使用MATLAB进行仿真。
以下是一种基本的MATLAB仿真流程:1.定义电机模型:根据电机的参数和特性,定义一个数学模型来表示电机的动态响应,例如通过电机的转矩-转速曲线或电机的方程。
2.设计速度控制器:根据系统要求和电机模型,设计一个适当的速度控制器。
可以使用PID控制器或其他控制算法。
3.设计PWM调制器:根据速度控制器输出的控制信号,设计一个PWM调制器来生成PWM信号。
根据电机模型和控制要求,选择合适的PWM调制算法。
4.设计电流控制器:根据PWM信号和电机模型,设计一个电流控制器。
可以使用PID控制器或其他控制算法。
5. 仿真验证:将以上设计参数输入到MATLAB仿真模型中,并进行仿真验证。
可以使用Simulink工具箱来搭建仿真模型,并通过逐步增加负载或改变速度设定值等方式来验证系统的性能。
直流调速系统的MATLAB仿真(报告)
直流调速系统的MATLAB 仿真一、开环直流速系统的仿真开环直流调速系统的电气原理如图1所示。
直流电动机的电枢由三相晶闸管整流电路经平波电抗器L 供电,通过改变触发器移相控制信号c U 调节晶闸管的控制角α,从而改变整流器的输出电压,实现直流电动机的调速。
该系统的仿真模型如图2所示。
图1 开环直流调速系统电气原理图图2 直流开环调速系统的仿真模型为了减小整流器谐波对同步信号的影响,宜设三相交流电源电感s 0L =,直流电动机励磁由直流电源直接供电。
触发器(6-Pulse )的控制角(alpha_deg )由移相控制信号c U 决定,移相特性的数学表达式为minc cmax9090U U αα︒-=︒-在本模型中取min 30α=︒,cmax 10V U =,所以c 906U α=-。
在直流电动机的负载转矩输入端L T 用Step 模块设定加载时刻和加载转矩。
仿真算例1 已知一台四极直流电动机额定参数为N 220V U =,N 136A I =,N 1460r /min n =,a 0.2R =Ω,2222.5N m GD =⋅。
励磁电压f 220V U =,励磁电流f 1.5A I =。
采用三相桥式整流电路,设整流器内阻rec 0.3R =Ω。
平波电抗器d 20mH L =。
仿真该晶闸管-直流电动机开环调速系统,观察电动机在全压起动和起动后加额定负载时的电机转速n 、电磁转矩e T 、电枢电流d i 及电枢电压d u 的变化情况。
仿真步骤:1)绘制系统的仿真模型(图2)。
2)设置模块参数(表1) ① 供电电源电压N rec N 2min 2200.3136130(V)2.34cos 2.34cos30U R I U α++⨯==≈⨯︒② 电动机参数 励磁电阻:f f f 220146.7()1.5U R I ===Ω 励磁电感在恒定磁场控制时可取“0”。
电枢电阻:a 0.2R =Ω电枢电感由下式估算:N a N N 0.422019.119.10.0021(H)2221460136CU L pn I ⨯==⨯≈⨯⨯⨯电枢绕组和励磁绕组间的互感af L :N a N e N 2200.21360.132(V min/r)1460U R I K n --⨯==≈⋅ T e 60600.132 1.262π2πK K ==⨯≈T af f 1.260.84(H)1.5K L I === 电机转动惯量2222.50.57(kg m )449.81GD J g ==≈⋅⨯③ 额定负载转矩L T N 1.26136171.4(N m)T K I ==⨯≈⋅表1 开环直流调速系统主要模型参数3)设置仿真参数:仿真算法odel5s ,仿真时间5.0s ,直流电动机空载起动,起动2.5s 后加额定负载L 171.4N m T =⋅。
PWM脉宽直流调速系统设计及matlab仿真验证
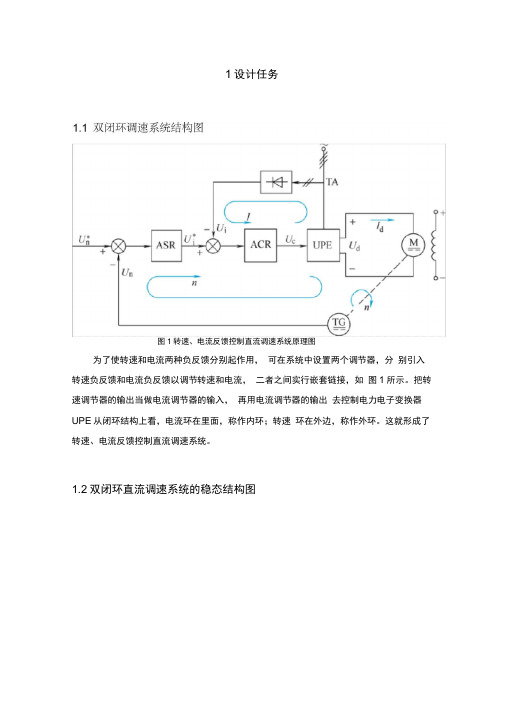
1设计任务图1转速、电流反馈控制直流调速系统原理图为了使转速和电流两种负反馈分别起作用,可在系统中设置两个调节器,分别引入转速负反馈和电流负反馈以调节转速和电流,二者之间实行嵌套链接,如图1所示。
把转速调节器的输出当做电流调节器的输入,再用电流调节器的输出去控制电力电子变换器UPE从闭环结构上看,电流环在里面,称作内环;转速环在外边,称作外环。
这就形成了转速、电流反馈控制直流调速系统。
1.2双闭环直流调速系统的稳态结构图双闭环直流调速系统的稳态结构图如图2所示,两个调节器均采用带限幅作用的PI 调节器。
转速调节器ASR的输出限幅电压U m决定了电流给定的最大值,电流调节器ACR的输出限幅电压U cm限制了电力电子变换器的最大输出电压Udm。
当调节器饱和时,输出打到限幅值,输入量的变化不再影响输出,除非有反向的输入信号使调节器退出饱和。
当调节器不饱和时,PI调节器工作在线性调节状态,其作用是使输入偏差电压U在稳态时为零。
为了实现电流的实时控制和快速跟随,希望电流调节器不要进入饱和状态,因此对于静特性来说,只有转速调节器饱和与不饱和两种情况。
1.3双闭环直流调速系统的动态结构图图3双闭环直流调速系统的动态结构图双闭环直流调速系统的动态结构图如图3所示,图中W ASR(S)和W ACR(S)分别表示转速调节和电流调节器的传递函数双闭环直流调速系统起动过程的转速和电流波形如图所示如图4所示,电机的起动过程中转速调节器 ASF 经历了不饱和、饱和、退饱 和三种情况:第I 阶段(0-b )是电流上升阶段;第U 阶段(t i -t 2)是恒流升速阶段;第 川阶段(t2以后)是转速调节阶段双闭环直流调速系统的起动过程有以下三个特点:1) 饱和非线性控制 2) 转速超调 3) 准时间最优控制1.4系统参数选取1.4.1整流电路平均失控时间常数T s设定PWM 勺开关频率为1KH z ,故H 型双极式PWM8流的调制周期为:T=1/f=0.001s 1.4.2电流滤波时间常数和转速滤波常数H 桥式电路每个波头的时间为°.5ms,为了基本滤平波头,应有 (1 ~ 2)T oi 0.5ms ,因此取 T oi 0.0004s 。
matlab直流电动机调速系统仿真实训心得
一、概述在现代工业生产中,直流电动机广泛应用于各种设备和机械中,其调速控制系统的稳定性和性能直接影响到整个生产线的效率和质量。
为了提高学生的实践操作能力和掌握直流电动机调速系统的原理和方法,我校开设了相关的仿真实训课程。
在本次实训中,我主要使用Matlab 软件,进行了直流电动机调速系统的仿真实验,获得了丰富的经验和收获,现将心得体会整理如下。
二、理论基础1. 直流电动机调速原理直流电动机调速系统是通过调节电动机的电流或电压来实现转速的调节。
常用的调速方法包括电阻调速、调速励磁和PWM调速等。
2. Matlab在仿真中的应用Matlab是一种功能强大的科学计算软件,广泛用于工程技术领域。
其仿真环境和信号处理工具箱可以方便地进行电机控制系统的建模和仿真。
三、实训内容与步骤1. 系统建模我根据直流电动机的特性和调速原理,进行了系统的建模工作。
通过Matlab的Simulink工具,搭建了直流电动机的数学模型,包括电动机的等效电路、控制系统和负载模型等。
2. 参数设置与仿真在建立完毕电机系统模型后,我对电机的各项参数进行了设置,包括额定转速、额定电流、负载惯量等。
利用Matlab进行了系统的仿真实验,观察了不同调速方法对电机性能的影响。
3. 实验结果分析通过对仿真实验数据的分析,我发现了不同调速方法的优缺点,比较了电机在不同负载和控制参数下的性能表现,提出了一些改进和优化控制策略的建议。
四、心得体会与经验总结1. 对仿真实验的认识通过本次实训,我深刻体会到仿真实验的重要性。
在实际工程中,通过仿真可以事先评估系统设计的合理性,降低试错成本,提高工程质量。
2. 对Matlab的认识与应用Matlab作为工程领域的标准软件之一,其强大的建模和仿真能力为工程师提供了便利。
在实训中,我更加熟练地掌握了Matlab的使用技巧,对其在电机控制系统仿真中的应用有了更深刻的理解。
3. 对直流电动机调速系统的认识通过本次实训,我对直流电动机调速系统的原理和方法有了更加深入的了解,认识到了控制系统设计和参数调节对电机性能的影响,为今后的工程实践打下了坚实的基础。
直流调速系统的MATLAB仿真
直流调速系统的MATLAB仿真直流调速系统是一种常见的电动机调速系统,其通过控制电枢电流或者换向电压,实现对电机转速的控制。
MATLAB是一款功能强大的工程软件,可以进行系统的建模仿真和控制算法的开发,因此可以用来进行直流调速系统的MATLAB仿真。
首先,我们需要对直流调速系统进行建模。
直流调速系统的主要组成部分包括电机、电流控制器和运动控制器。
电机是系统的执行器,电流控制器用来控制电机的电流,根据控制电机速度的需求调节电机的电压和电流。
运动控制器用来计算输出控制电压,控制电机的转速。
在MATLAB中,可以使用Simulink工具箱进行系统的建模。
Simulink提供了丰富的电气元件库和控制元件库,方便用户进行系统的搭建。
首先,我们需要在Simulink中搭建直流电机模型,可以使用电感、电阻和后验电动势等元件来描述电机的特性。
然后,可以添加电流控制器和运动控制器,分别用来控制电机的电流和速度。
在仿真过程中,我们可以通过输入电压的变化来模拟用户对电机速度的调节。
可以使用阶跃输入信号来模拟用户的控制输入。
然后,通过对系统进行仿真,观察输出转速的变化,并根据需要对控制算法进行调节。
可以使用MATLAB的绘图工具对输出转速进行可视化,也可以记录仿真过程中的各种参数,方便后续的分析和处理。
当然,在进行直流调速系统的MATLAB仿真时,还可以加入一些其他的因素,如电机负载变化、电机参数变化等。
这些因素会对系统的动态性能和稳态精度产生影响,因此需要在仿真过程中对其进行考虑。
总之,直流调速系统的MATLAB仿真可以帮助我们进行系统的设计和优化。
通过对系统的建模和仿真,以及对仿真结果的分析,可以帮助我们更好地理解和掌握直流调速系统的原理和特性,并且为系统的实际应用提供指导和支持。
数字化PWM可逆直流调速系统MATLAB仿真
1.要求
设计一个转速、电流双闭环控制PWM可逆直流调速系统。电动机控制电源采用H型PWM功率放大器,其占空比变化为0~0.5~1时,对应输出电压为-264V~0~264V,为电机提供最大电流25A。速度检测采用光电编码器(光电脉冲信号发生器),且其输出的A、B两相脉冲经光电隔离辩相后获得每转1024个脉冲角度分辨力和方向信号。电流传感器采用霍尔电流传感器,其原副边电流比为1000:1,额定电流50A。已知:
Keywords:DCTimingSystem; PWM;Double CloseLoop; PI Adjust
六、成绩评定
指导教师评语:
指导教师签字:
2012年月日
项目
评价
项目
评价
调查论证
工作量、工作态度
实践能力
分析、解决问题能力
质量
创新
得分
七、答辩记录
答辩意见及答辩成绩:
答辩小组教师(签字):
2012年月日
5.肖阳.基于DSP的伺服电机的调速系统的控制设计[D].武汉:武汉理工大学硕士论文,2009.
6.洪乃刚.电力电子和电力拖动控制系统的MATLAB仿真.北京:机械工业出版社,2006.
四、课程设计(学年论文)摘要(中文)
本文介绍双闭环PWM直流调速系统原理基础上,根据系统的动、静态性能指标采用工程设计方法设计调节器参数。调速方案的优劣直接关系到系统调速的质量,根据电机的型号及参数选择最优方案,以确保系统能够正常,稳定地运行。并运用MATLAB的Simulink和Power System工具箱、面向系统电气原理结构图的仿真方法,实现了转速电流双闭环PWM直流调速系统的建模与仿真。文章重点介绍了调速系统的建模和PWM发生器、直流电机模块互感等参数的设置。给出了PWM直流可逆调速系统的仿真模型和仿真结果,验证了仿真模型及调节器参数设置的正确性。
直流调速系统的matlab仿真
一,转速反馈控制直流调速系统的matlab仿真1,基本原理:根据自动控制原理,将系统的被调节量作为反馈量引入系统,与给定量进行比较,用比较后的偏差值对系统进行控制,可以有效地抑制甚至消除扰动的影响,而维持被调节量很少变化或不变,这就是反馈控制的基本作用。
在负反馈基础上的“检查误差,用以纠正误差”这一原理组成的系统,其输出量反馈的传递途径构成一个闭环回路,因此被称作闭环控制系统。
在直流系统中,被调节量是转速,所构成的是转速反馈控制的直流调速系统。
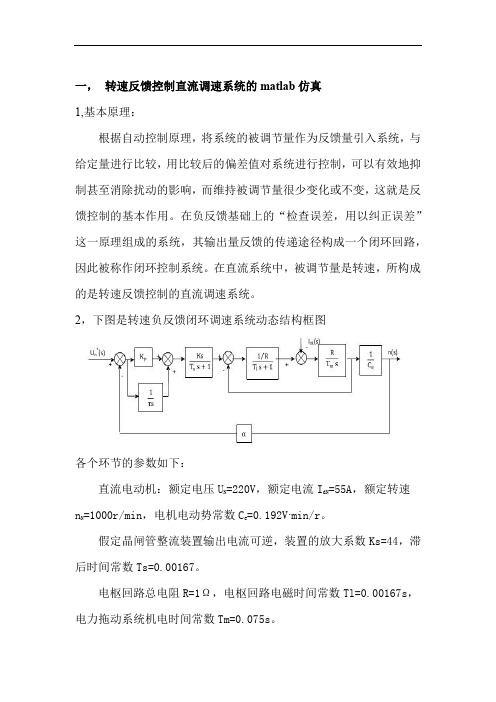
2,下图是转速负反馈闭环调速系统动态结构框图各个环节的参数如下:直流电动机:额定电压U N=220V,额定电流I dN=55A,额定转速n N=1000r/min,电机电动势常数C e=0.192V·min/r。
假定晶闸管整流装置输出电流可逆,装置的放大系数Ks=44,滞后时间常数Ts=0.00167。
电枢回路总电阻R=1Ω,电枢回路电磁时间常数Tl=0.00167s,电力拖动系统机电时间常数Tm=0.075s。
转速反馈系数α=0.01 V·min/r。
对应的额定电压U n*=10V。
在matlab的simulink里面的仿真框图如下其中PI调节器的值暂定为Kp=0.56,1/τ=11.43。
3,仿真模型的建立:进入matlab,单击命令窗口工具栏的simulink图标,打开simulink模块浏览器窗口,如下图所示:打开模型编辑器窗口,双击所需子模块库的图标,则可以打开它,用鼠标左键选中所需的子模块,拖入模型编辑窗口。
要改变模块的参数双击模块图案即可(各模块的参数图案)。
加法器模块对话框Gain模块对话框把各个模块连接起来并按照上面给定的电机参数修改各个模块相应的参数,可以得到如下的比例积分的无静差直流调速系统的仿真框图:4,仿真后的结果及其分析:其中输出scope1中可以看出超调和上升时间等。
改变PI调节器的参数,并在仿真的曲线中得到最大的超调级调整时间,相互间进行比较,如下表所示:参照以上表格中的数据分析可知,改变PI调节器的参数,可以得到快速响应的超调量不一样,调节时间不一样的响应曲线。
直流电机调速matlab仿真报告

直流电机调速仿真报告1. 背景直流电机是一种常见的电动机类型,广泛应用于工业生产和家庭设备中。
在实际应用中,为了满足不同工况下的需求,需要对直流电机进行调速控制。
调速控制可以实现电机转速的精确控制,提高系统的稳定性和效率。
本报告旨在通过Matlab仿真分析直流电机调速控制系统,在理论与实践结合的基础上,提出相应的建议。
2. 分析2.1 直流电机调速原理直流电机调速原理主要基于改变电源的电压或者改变外加负载来实现对电机转速的控制。
常见的直流电机调速方法有:•电压调制法:通过改变直流电源的输出电压来改变转矩和转速;•变阻器分压法:通过改变外接阻值来改变转矩和转速;•变极数法:通过改变励磁回路中串联或并联的励磁线圈数目来改变转矩和转速;•PWM调制法:通过脉冲宽度调制技术来控制输入给定功率。
2.2 直流电机调速控制系统直流电机调速控制系统由电源、电机、传感器、控制器和负载组成。
其中,传感器用于测量电机的转速和位置,控制器根据测量值计算出合适的控制信号,通过电源提供给电机。
负载则影响电机的转速和转矩。
常见的直流电机调速控制方法有:•比例积分(PI)控制:根据误差信号进行比例和积分运算,生成合适的输出信号;•模糊控制:基于模糊推理原理,根据输入变量和规则库生成输出信号;•自适应控制:根据系统动态特性自动调整参数以实现最优性能。
2.3 仿真建模与参数设置本次仿真采用Matlab/Simulink软件进行建模与仿真。
首先需要确定直流电机的基本参数,如额定功率、额定转速、额定电压等。
然后根据实际情况设置仿真模型中的参数。
本次仿真设置了一个基于PWM调制法的直流电机调速系统模型。
具体参数如下:•额定功率:100W•额定转速:1500rpm•额定电压:220V•PWM调制频率:1kHz•控制器采样周期:0.01s3. 结果与分析3.1 仿真结果展示在进行仿真之后,我们得到了直流电机调速系统的仿真结果。
以下是部分结果的展示:•转速曲线图:•转矩曲线图:3.2 结果分析根据仿真结果,可以对直流电机调速系统进行分析。
直流电机PWM调速系统的设计与仿真
直流电机PWM调速系统的设计与仿真一、引言直流电机是电力传动中最常用的一种电动机,具有调速范围广、响应快、结构简单等优点。
而PWM(脉宽调制)技术是一种有效的电机调速方法,可以通过改变占空比控制电机的转速。
本文将介绍直流电机PWM调速系统的设计与仿真,包括建模分析、控制策略、电路设计和仿真实验等内容。
二、建模分析1.直流电机的模型直流电机的数学模型包括电动势方程和电机转矩方程。
电动势方程描述电机的输出电动势与供电电压之间的关系,转矩方程描述电机的输出转矩与电机转速之间的关系。
2.PWM调速系统的控制策略PWM调速系统的控制策略主要包括PID控制和模糊控制两种方法。
PID控制是一种经典的控制方法,通过比较实际输出与期望输出,计算出控制量来调整系统。
模糊控制则是一种基于模糊逻辑的控制方法,通过模糊推理,将输入量映射为输出量。
三、电路设计1.电机驱动电路设计电机驱动电路主要由电流传感器、逆变器和滤波器组成。
电流传感器用于测量电机的电流,逆变器将直流电压转换为交流电压,滤波器用于消除电压中的高频噪声。
2.控制电路设计控制电路主要由控制器、比较器和PWM信号发生器组成。
控制器接收电机转速的反馈信号,并与期望转速进行比较,计算出控制量。
比较器将控制量与三角波进行比较,生成PWM信号。
PWM信号发生器将PWM信号转换为对应的脉宽调制信号。
四、仿真实验1.系统建模与参数设置根据直流电机的模型,建立MATLAB/Simulink仿真模型,并根据实际参数设置电机的转矩常数、转矩常数、电机阻抗等参数。
2.控制策略实现使用PID控制和模糊控制两种方法实现PWM调速系统的控制策略。
通过调节控制参数,比较不同控制方法在系统响应速度和稳定性上的差异。
3.仿真实验结果分析通过仿真实验,分析系统的静态误差、动态响应和稳定性等性能指标。
比较不同控制方法的优缺点,选择合适的控制方法。
五、结论本文介绍了直流电机PWM调速系统的设计与仿真,包括建模分析、控制策略、电路设计和仿真实验等内容。
MATLAB直流调速系统仿真
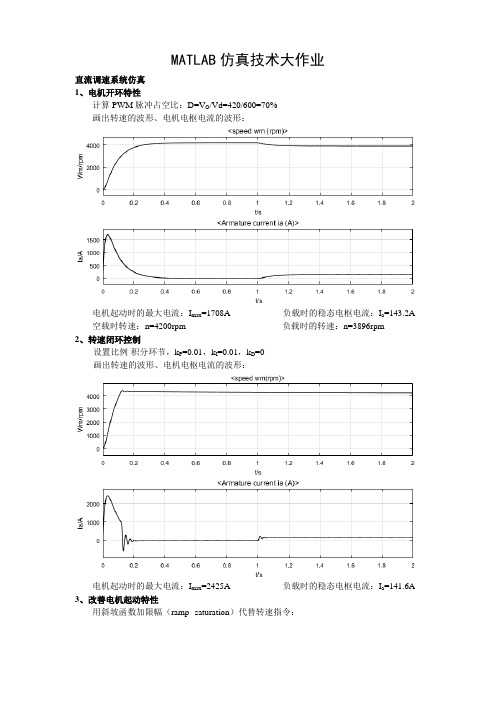
MATLAB仿真技术大作业直流调速系统仿真1、电机开环特性计算PWM脉冲占空比:D=V O/Vd=420/600=70%画出转速的波形、电机电枢电流的波形:电机起动时的最大电流:I max=1708A 负载时的稳态电枢电流:I a=143.2A 空载时转速:n=4200rpm 负载时的转速:n=3896rpm2、转速闭环控制设置比例-积分环节,k P=0.01,k I=0.01,k D=0画出转速的波形、电机电枢电流的波形:电机起动时的最大电流:I max=2425A 负载时的稳态电枢电流:I a=141.6A 3、改善电机起动特性用斜坡函数加限幅(ramp--saturation)代替转速指令:斜坡斜率设为8400,限幅设为4200。
画出转速的波形、电机电枢电流的波形:电机起动时的最大电流:I max=619.7A4、简化降压斩波器降压斩波器只使用一只IGBT和一只二极管时,再次进行仿真。
画出电机电枢电流的波形与第3问的波形进行比较:与第3问的波形进行比较:t=0.3s时,I a(3)=379.3A I a(4)=379.3At=0.8s时,I a(3)=-8.92A I a(4)=-0.02107At=1.5s时,I a(3)= 143.4A I a(4)=143.8A通过对比,可知三段波形的数值几乎无差别或差别非常小可忽略不计;但波形显示在t=0.5s 左右时第四问波形的纹波值比第三问波形的纹波值小。
因为器件替换后,各部分的功能并未发生变化,电路的正常工作状态并未受到影响,因此用不同的降压斩波器波形几乎无差别。
纹波的区别可能是因为二极管与带反并联二极管的IGBT、不带反并联二极管的IGBT与带反并联二极管的IGBT结构上的区别所导致。
PWM脉宽直流调速系统设计及matlab仿真验证

PWM脉宽直流调速系统设计及matlab仿真验证摘要双闭环(电流环、转速环)调速系统是一种当前应用广泛的电力传动系统。
它具有动态响应快、抗干扰能力强等优点。
反馈闭环控制系统具有良好的抗扰性能,它对于被反馈环的前向通道上的一切扰动作用都能有效的加以抑制。
采用转速负反馈和PI调节器的单闭环的调速系统可以在保证系统稳定的前提下实现转速无差。
但如果对系统的动态性能要求较高,例如要求起制动、突加负载动态速降较小等,单闭环系统就难以满足要求。
这主要是因为在单闭环系统中不能完全按照需要来控制动态过程的电流或转矩。
在单闭环系统中,只有电流截止负反馈环节是专门用来控制电流的。
但它只是在超过临界电流值以后,强烈的负反馈作用限制电流的冲击,并不能很理想的控制电流的动态波形。
在实际工作中,我们希望在电机最大电流限制的条件下,充分利用电机的允许过载能力,最好是在过度过程中始终保持电流(转矩)为允许最大值,使电力拖动系统尽可能用最大的加速度启动,达到稳定转速后,又让电流立即降下来,使转矩马上与负载相平衡,从而转入稳态运行。
这时,启动电流成方波形,而转速是线性增长的。
这是在最大电流转矩条件下调速系统所能得到的最快启动过程。
关键字:PWM脉宽直流调速 matlab仿真Abstract:Dual closed loop speed control system is a widely used electric power transmission system (current loop, speed loop). It has the advantages of fast dynamic response, anti-interference ability. The feedback loop control system has a good anti-interference performance, it is for all the perturbation effects on the prior to the passage of the feedback loop can be effectively suppressed. Single negative feedback and PI regulator speed closed-loop speed control system can guarantee the system stability under the premise of speed without error. But if the higher requirements of the dynamic performance of the system, such as requiring braking, sudden load dynamic downhill smaller, single closed-loop system would be difficult to meet the requirements. This is primarily because in a single closed-loop system is notcompletely in accordance with the need to control the current or torque of the dynamic process. Single closed-loop system, the only the current deadline negative feedback link is designed to control current. But it is only after more than the critical current value, a strong negative feedback effect limit the impact of the current, and is not very satisfactory control current dynamic waveform. We hope that the maximum current limit of the motor under the conditions, make full use of the motor allows overload capacity, it is best to always keep in the over-the process of current (torque) to allow the maximum, so that the electric drive system as much as possible in the actual work, start with the greatest acceleration, reach a steady speed, letting the current immediately down the torque immediately be balanced with the load, and thus transferred to the steady-state operation. At this time, the starting current square-wave, while the speed is linear growth. This is a speed control system under conditions of maximum current torque can get the fastest boot process.Keywords: PWM pulse width DC speed matlab imitationPWM脉宽直流调速系统设计及matlab仿真验证1设计任务1.1双闭环调速系统结构图图1 转速、电流反馈控制直流调速系统原理图为了使转速和电流两种负反馈分别起作用,可在系统中设置两个调节器,分别引入转速负反馈和电流负反馈以调节转速和电流,二者之间实行嵌套链接,如图1所示。
配合控制的直流可逆调速系统的Matlab仿真
系统仿真学报©Journal of System Simulation第20 卷第21 期2008 年11 月V ol. 20 No. 21Nov., 2008 α=β配合控制的直流可逆调速系统的Matlab 仿真吴云1,闻雨2(1.辽宁石油化工大学信息与控制工程学院, 辽宁抚顺113001;2.渤海船舶重工有限责任公司, 辽宁葫芦岛125004)摘要:针对面向系统传递函数结构图仿真方法的不足,提出了一种基于MATLAB的Simulink和Power System 工具箱、面向系统电气原理结构图的仿真新方法,实现了转速与电流双闭环α= β配合控制的直流可逆调速系统的建模与仿真。
分别介绍了同步脉冲触发器、移相器控制器和PI调节器的建模,给出了直流可逆调速系统的仿真模型和仿真结果,仿真结果表明了仿真算法可信度较高。
关键词: α= β配合控制;直流电机;MATLAB仿真;移项控制器中图分类号: TP391.9 文献标识码:A 文章编号:1004-731X (2008) 21-5967-03 Matlab Simulation of α= βModerating Control DC SR SystemWU Yun1, WEN Yu2(1. School of Inf orm ation and Control Engineering, Liaoning University of Petroleum & Chemical Technology, Funshun 113001, China;2. Bohai Shipbuilding Heavy Industry Co., Ltd, Huludao 125004, China)Abstract: A novel method of construction & simulation was put forward for the model of α= βmoderating control DC SR system based on Matlab Simulink & Power System Blockset, because it was shortage for facing system transfer function construction drawing to simulate. The model of synchronized 6-pulse generator, shifter and PI controller were introduced, and the simulation results & models for the α= βmoderating control DC SR system were provided. Simulation results show that simulation method is correct with high credibility.Key words: α= βmoderating control; DC motor; MATLAB simulation; shifter引言晶闸管反并联的电枢可逆线路是可逆调速系统的典型线路之一。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
六、成绩评定
指导教师评语:
指导教师签字:
2012年月日
项目
评价
项目
评价
调查论证
工作量、工作态度
实践能力
分析、解决问题能力
质量
创新
得分
七、答辩记录
答辩意见及答辩成绩:
答辩小组教师(签字):
2012年月日
2012年月日2012年月日
二、进度安排
第一阶段:选择课程设计题目,明确课程设计任务和要求,查看参考资料。
第二阶段:进行理论分析,完成转速和电流调节器设计、系统仿真建模与分析,进行系统主电路和控制电路原理图设计等。
第三阶段:总结课题内容、撰写课程设计报告。
第四阶段:准备和参加课程设计答辩。
三、应收集资料及主要参考文献
1.罗飞.电力拖动与运动控制系统[M].北京:化学工业出版社,2007.
2.陈伯时.电力拖动自动控制系统——运动控制系统[M].北京:机械工业出版社,2003.
3.王兆安.电力电子技术[M].北京:机械工业出版社,2004.
4.崔启明.动车组自动门控制系统的研究[D].长春:吉林大学硕士论文,2009.
(2)完成系统电气原理图的设计(包括电路原理图设计、参数计算、元器件选型)
1)主电路的设计;
2)PWM脉冲信号产生电路的设计;
3)转速、电流调节器及其限幅电路的设计;
4)转速、电流检测电路的设计;
5)保护电路的设计;
6)辅助电源电路的设计。
(3)PCB板的设计、制作与调试(根据时间选做)
指导教师签字:教研室主任签字:
5.肖阳.基于DSP的伺服电机的调速系统的控制设计[D].武汉:武汉理工大学硕士论文,2009.
6.洪乃刚.电力电子和电力拖动控制系统的MATLAB仿真.北京:机械工业出版社,2006.
四、课程设计(学年论文)摘要(中文)
本文介绍双闭环PWM直流调速系统原理基础上,根据系统的动、静态性能指标采用工程设计方法设计调节器参数。调速方案的优劣直接关系到系统调速的质量,根据电机的型号及参数选择最优方案,以确保系统能够正常,稳定地运行。并运用MATLAB的Simulink和Power System工具箱、面向系统电气原理结构图的仿真方法,实现了转速电流双闭环PWM直流调速系统的建模与仿真。文章重点介绍了调速系统的建模和PWM发生器、直流电机模块互感等参数的设置。给出了PWM直流可逆调速系统的仿真模型和仿真结果,验证了仿真模型及调节器参数设置的正确性。
(3)直流电源电压:264V;
(4)主要技术指标:调速范围为0-1500 r/min,电流过载倍数为1.5倍,速度控制精度0.1%(额定转速时)。
2.任务
(1)完成系统理论与仿真分析
1)进行系统参数计算,完成转速、电流调节器的结构和参数设计;
2)利用Matlab/Simulink建立系统的仿真模型,对整个调速系统的动态性能(给定输入的跟随性能和负载与电网电压扰动下的抗扰性能)进行仿真分析。
关键词:直流调速;PWM;双闭环;PI调节
五、课程设计(学年论文)摘要(英文)
According to dynamic and static performance,the method uses engineering design to set parameters of controllers based on principle ofDoubleCloseLoop PWM speed system.Governor the pros and cons of theprogram directly related to thequality of the system governor, according to the motor model and parameters to choose the best program to ensure that the system to normal, stable operation.The approachusingelectrical principle and toolbox of simulink and power system in Matlab has completed the modeling and simulation of system.The model of simulation and parameters controllers and PWM generator is introduced emphatically.As well as mutual inductance parameter in DC motors.The results of simulationale obtained and the results are close to actual situation,it shows the correction of the model and parametersofcontrollers.
(1)直流电动机:PN= 3 kW,nN= 1500 r/min,UN= 220 V,IN= 17.3 A,电枢回路总电阻R=2.5Ω,电磁时间常数Tl=0.017s,机电时间常数Tm=0.076s,电动势系数Ce=0.1352V/(r.min-1);
(2)H型3 F; b8 r3 C( v. m3 X大学设计,大学课程,大学课程设计,毕业设计,毕业论文,习题答案,课件PPT,精品课件+ B0 E8 l" d( m+ E# r0 p I$ u) W' P+ U. a( Q. [2 { x7 P3 k课程设计,毕业设计论文,习题答案,课件PPTPWM功率变换器:工作频率为2kHz×75%+答辩成绩×25%)
一、课程设计的任务和要求
1.要求
设计一个转速、电流双闭环控制PWM可逆直流调速系统。电动机控制电源采用H型PWM功率放大器,其占空比变化为0~0.5~1时,对应输出电压为-264V~0~264V,为电机提供最大电流25A。速度检测采用光电编码器(光电脉冲信号发生器),且其输出的A、B两相脉冲经光电隔离辩相后获得每转1024个脉冲角度分辨力和方向信号。电流传感器采用霍尔电流传感器,其原副边电流比为1000:1,额定电流50A。已知: