坐标正反算程序(交点法5800)
卡西欧5800程序坐标正反算[1]
![卡西欧5800程序坐标正反算[1]](https://img.taocdn.com/s3/m/5459ba14a216147917112868.png)
卡西欧5800程序坐标正反算修改 ZX-WN (其他的程序不用改,所有程序输完后退出进行扩展变量:5→Dimz 按EXE出现Done就OK了)WN(子程序不运行)" ZS=1,FS=2 "?N: 1÷P →C:(P-R)÷(2HPR)→D:180÷π→E: If N=1: Then Goto 1: Else Goto 2: IfEnd← ┚LbI 1:1 →I:0 →Z : Abs(K- O) →W: Prog " ZS "← ┚F-90→F← ┚" JJ " ?K: " PJ " ?L: " ZX= ":X+Lcos(F+K) →Z[3] ◢" ZY= ": Y+Lsin(F+K) →Z[4] ◢" QXFWJ= ":F DMS ◢Abs(Z) →Z:Goto 8← ┚LbI 2: " X " ?I: " Y " ?J: Prog " FS " : " FSZH= " : O+W→K ◢" FSJL= ":Z ◢Lbl 8正算子程序( ZS )(不运行)1÷P→C:(P-R)÷(2HPR) →D: 180÷π→E← ┚0.1739274226→A :0.3260725774→B :0.0694318442→K :0.3300094782→L : 1-L→F : 1-K→M : U+W ( Acos ( G+QEKW ( C+KWD ))+Bcos ( G+QELW ( C+LWD )) +Bcos ( G+QEFW ( C+FWD )) +Acos ( G+QEMW ( C+MWD )))→X : V+W ( Asin ( G+QEKW ( C+KWD )) +Bsin ( G+QELW ( C+LWD )) +Bsin ( G+QEFW ( C+FWD )) +Asin ( G+QEMW ( C+MWD )))→Y : G+QEW ( C+WD )+90→F :X+ZcosF→X :Y+ZsinF→Y3 反算子程序( FS )(不运行)G-90→T : Abs (( Y-V )) cos ( T ) - ( X-U ) sin ( T )→W :0→Z← ┚Lbl 0← ┚prog " ZS ": T+QEW ( C+WD )→L :( J-Y ) cosL- ( I-X )sinL→Z :If Abs(Z) < 0.001: Then Goto1 :Else W+Z→W :IfEnd :Goto 0← ┚ Lbl 1 :0→Z : Prog " ZS ":( J-Y )÷sinF→ZZX-WN主程序(运行主程序是一个数据库),该程序适用于匝道,对全段完整非对称曲线计算太过麻烦)" CZX " ?S( 仪站 X 坐标 ): " CZY " ?W (仪站 Y 坐标)LbI 0: " K "?K: If K≤126.9 (第 1 条单一曲线的终点下面同上) : Then Goto A :Else If K≤176.9 And K >126.9: Then Goto B:Else If K≤259.562 And K >176.9: Then Goto C:Else If K≤309.562 And K > 259.562: Then Goto D :IfEnd:IfEnd:IfEnd:IfEnd← ┚LbI A:92094.336 (起点 X 坐标)→U:8287.962 (起点 Y 坐标)→V:0 起点桩号→O:145°11 ' 54 "(方位角)→G:126.9 (曲线长度)→H:10^(45) (起点半径)→P:10^(45) (止点半径)→R:+1 (路线左右偏,左负右正,直线输 0 )→Q:Prog " WN " :Goto WLbI B:91990.134→U:8360.388→V:126.9→O:145°11 ' 54 "→G:50→H:10^(45) →P:150 →R:+1→Q:Prog " WN " :Goto WLbI C:91947.609→U:8386.570→V:176.9→O:154°44 ' 51 "→G:82.662→H:150 →P:150 →R:+1→Q:Prog " WN " :Goto WLbI D:91867.101→U:8399.992→V:259.562→O:186°19 ' 19 "→G:50→H:150 →P: 10^(45) →R:+1→Q:Prog " WN " :Goto WLbI W: " PJ1 "?T← ┚ (该项是只左右边桩再左右偏距,输 0 为不再左右偏,可以直接出方位角、距离,适用于桥梁桥台、盖梁、涵洞八字墙等放样,以路线前进方向,前 - ,后 + )If T=0 :Then Z[3]→Z: Z[4]→M: Goto P: Else Goto V: IfEnd← ┚LbI V: " JJ1 "? O← ┚ (左右边桩再偏夹角,用180° 减去路线夹角)" X1= " : Z[3]+Tcos ( F+N+ O )→U ◢" Y1= " :Z[4]+Tsin ( F+N+ O )→V ◢U→Z: V→M: GotoP← ┚LbI P:Pol(Z-S,M-W): If J≤0 :Then J+360°→J: IfEnd← ┚" JL= ":I ◢ (仪站至测点的距离)" FWJ= ":J DMS ◢ (仪站至测点的方位角)Goto01.规定以道路中线前进方向(即里程增大的方向)区分左右;当线元往左偏时Q=-1 ;当元线往右偏时, Q=1 :当元线为直线时,Q=0 °2.当所求点位于中线时, Z=0 ;当位于中线左侧时, Z 取负值:当位于中线右侧时, Z 取正值°当线元为直线时,其起点、止点的曲率半径为无穷大,以 10 的 45 次方代替°3.当线元为圆曲线时,无论其起点、止点与什么线元相接,其曲率半径均等于圆弧的半径°4.当线元为完整的缓和曲线时,起点与直线相接时,曲率半径为无穷大,以 10 的 45 次方代替°与圆曲线相接时,曲率半径等于圆曲线的半径,止点跟直线相接时,曲率半径为无穷大,以 10 的 45 次方代替;与圆曲线相接时,曲率半径等于圆曲线的半径°5.当线元为非完整缓和曲线时,起点与直线相接时,曲率半径等于设计规定的值;与圆曲线衔接时,曲率半径等于圆曲线的半径°止点与直线相接时,曲率半径等于设计规定的值;与圆曲线衔接时,曲率半径等于圆曲线的半径°二、输入与显示说明1. 输入部分:2. . 输入3. ZS=1 , FS=2 ,选择计算方式,输入 1 正算;输入 2 反算4. 数据库的输入5. U ?线元起点的 X 坐标6. V ?线元起点的 Y 坐标7. O ?线元起点的里程8. G ?线元的起点切点方位角9. H ?线元的长度10. P ?线元起点的曲率的半径11. R ?线元止点的曲率的半径 .12. ZY ?线元左右偏标志(左偏 Q=-1 ,右偏 Q=1 ,直线段 Q=0 )13. 计算时:14. K ?正算时所求的里程15. JJ ?夹角,(正交90 °,斜交直接输角度)16. PJ ?偏距(左负右正)17. . 结果18. ZX= 正算时,计算得出的测点的 X 坐标19. ZY= 正算时,计算得出的测点的 Y 坐标20. QXFWJ= 正算时,测点对应中线点的切线方位角21. PJ1? :左右桩号再偏距离,不需要时输 022. JJ1? : 左右边桩再偏角度23. JL= 仪站与测点的距离24. FWJ= 仪站与测点的方位角25. 反算时输入:26. X ?反算时所求点的 X 坐标27. Y ?反算时所求点的 Y 坐标28. 结果29. FSZH= 反算时,计算得出的所求点的里程30. FSJL= 反算时,计算得出的所求点的边距(负为左偏,正为右偏)出售 5800 计算器带主线正反算(正交 / 斜交),匝道全段正反算,全段高程(超高、加宽)中边桩出售 5800 计算器带程序1 、全路段主线坐标正反算(正交 / 斜交)2 、匝道全段坐标正反算(正交 / 斜交 )3 、全路段中边桩高程(带超高)有电子版的范例,初学者包教会,使用简单,快捷 . 让你短时间成为一个熟练的测量者。
5800坐标计算程序交点法
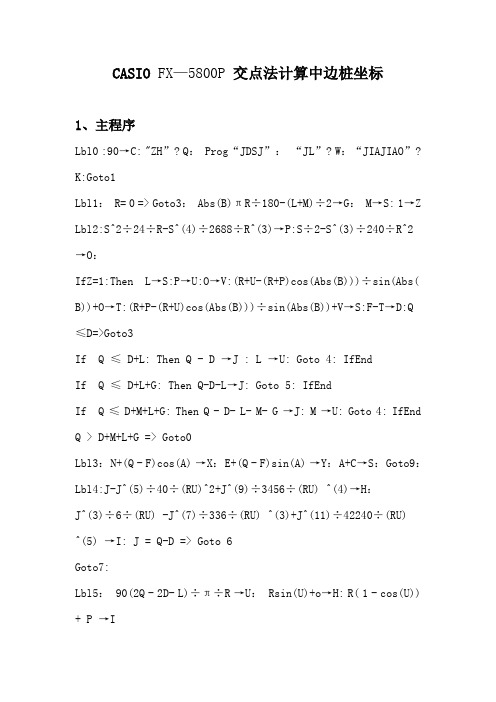
CASIO FX—5800P交点法计算中边桩坐标1、主程序Lbl0 :90→C: "ZH”? Q:Prog“JDSJ”:“JL”? W:“J IAJIAO”? K:Goto1Lbl1: R= 0 => Goto3: Abs(B)πR÷180-(L+M)÷2→G:M→S: 1→Z Lbl2:S^2÷24÷R-S^(4)÷2688÷R^(3)→P:S÷2-S^(3)÷240÷R^2→O:IfZ=1:Then L→S:P→U:O→V:(R+U-(R+P)cos(Abs(B)))÷sin(Abs( B))+O→T:(R+P-(R+U)cos(Abs(B)))÷sin(Abs(B))+V→S:F-T→D:Q≤D=>Goto3If Q ≤ D+L: Then Q - D →J : L →U: Goto 4: IfEndIf Q ≤ D+L+G: Then Q-D-L→J: Goto 5: IfEndIf Q ≤ D+M+L+G: Then Q - D- L- M- G →J: M →U: Goto 4: IfEnd Q > D+M+L+G => Goto0Lbl3: N+(Q - F)cos(A) →X: E+(Q - F)sin(A) →Y:A+C→S: Goto9:Lbl4:J-J^(5)÷40÷(RU)^2+J^(9)÷3456÷(RU) ^(4)→H:J^(3)÷6÷(RU) -J^(7)÷336÷(RU) ^(3)+J^(11)÷42240÷(RU)^(5) →I: J = Q-D => Goto 6Goto7:Lbl5: 90(2Q - 2D- L)÷π÷R →U: Rsin(U)+o→H: R( 1 - cos(U)) + P →ILbl6: If B< 0: Then - I→I: IfEndN -Tcos(A)+Hcos(A) - Isin(A) →X: E-Tsin(A) + Hsin(A) +Icos(A) →Y:Goto8Lbl 7: If B> 0: Then –I →I: IfEndN+Scos(A+B)+Hcos(A+B)-Isin(A+B)→X:E+Ssin(A+B)+Hsin(A+B)+Icos(A+B) →YLbl 8:R →U: If B< 0: Then –R →U: IfEndIf J=Q-D: Then C+A+90J^2÷π÷U÷L→S: Goto9:IfEndIf J= Q-D -L- M- G: Then C+A+B - 90J^2÷π÷U÷M →S: Goto9: IfEndIfQ≤D+ L+ G: ThenQ-D-L →J : C+A+90L÷π÷U+180J÷π÷U→S: Goto9: IfEndLbl 9: X+Wcos(S-90+K) →X: Y+Wsin(S-90+K) →Y:“X=”: X◢“Y=”: Y◢“U=”:(S-90+K) ◢Goto02、子程序0.1739274226 →A:0.3260725774 →B:0.3300094782→L:0.0694318442 →K:1-L →F:1-K →M:1÷P→C:(P-R) ÷(2HPR) →D:180÷π→E:G+QEKW(C+KWD) →Z [1]: G+QELW(C+LWD) →Z [2] : G+QEFW(C+FWD) →Z [3] : G+QEMW(C+MWD) →Z [4]:A cos(Z [1]) →X:X+B cos(Z[2]) →X:X+B cos(Z [3]) →X: X+A cos(Z [4])→X:U+WX→X:A sin(Z [1]) →Y:Y+B sin(Z [2]) →Y:Y+B sin(Z [3]) →Y:Y+Asin(Z [4]) →Y:V+WY→Y:G+QEW(C+WD)+90→F:“F=”:F-90+J◢X+Z cos(F-90+J) →X:Y+Z sin (F-90+J) →Y3、曲线要素If Q≤桩号:Then 交点桩号→F:交点X坐标→N:交点Y坐标→E:起点方位角→A:夹角→B:第一缓和曲线长度→L:第二缓和曲线长度→M:GotoA:If End………………Lbl A:Return程序中各变量含义:JD ── 交点桩号 FJDX ── 交点X坐标NJDY ── 交点Y坐标 EFWJ ── 起始方位角 APJ ──偏角(左-- 右+) BR ── 圆曲线半径 RLS1 ── 第一缓和曲线长 LLS2 ── 第二缓和曲线长 M。
CASIO5800坐标正反算计算程序

CASIO5800坐标正反算计算程序CASIO 9860/5800坐标正反算计算程序1. 坐标正算主程序(命名为ZBZS)第1行:Lbl 0:”K=”?K:”BIAN=”? Z:”α=”?B第2行:Prog “A”第3行:”X=”:N+Zcos(F+B)◢第4行:”Y=”:E+Zsin(F+B)◢第5行:”F=”:F◢第6行:Goto 0K——计算点的里程BIAN——计算点到中桩的距离(左负右正)α——取前右夹角为正2. 坐标反算桩号和偏距主程序(命名为ZBFS)第1行:”X1=”? C:”Y1=”?D: ”K1=”?K第2行:Lbl 0:Prog “A”第3行:Pol(C-N,D-E)第4行:List Ans[1]→I第5行:List Ans[2]→J第6行:Icos(F-J)→S:K+S→K第7行:Abs(S)>0.0001=>Goto 0第8行:”K1=”:K◢第9行:”BIAN=”:Isin(J-F)→Z◢X1——取样点的X坐标Y1——取样点的Y坐标K1——输入时为计算起始点(在线路内即可),输出时为反算点的桩号Z——偏距(左负右正)3. 计算坐标子程序(命名为XYF)为了简洁,本程序由数据库直接调用,上述中的正反算主程序不直接调用此程序第1行:K-A→S:(Q-P)÷L→I第2行:N+∫(cos(F+X(2P+XI)×90÷π),0,S)→N第3行:E+∫(sin(F+X(2P+XI)×90÷π),0,S)→E第4行:F+S(2P+SI)×90÷π→F4. 数据库(命名为A)第1行:K≤175.191=>Stop第2行:175.191→A:428513.730→N:557954.037→E:92°26′40″→F:0→P:1/ 240→Q:70.417→L:K≤A+L =>GoTo 1(第一缓和曲线,圆半径为240)第3行:245.607→A: 428507.298→N:558024.092→E: 100°50′59.4″→F: 1/240→P:1/240→Q:72.915→L: K≤A+L =>Goto 1(第圆曲线,半径为240)第4行:318.522→A: 428482.988→N:558092.538→E: 118°15′25.2″→F: 1/240→P: 0→Q: 55.104→L: K≤A+L =>Goto 1(第二缓和曲线,圆半径为240)第5行:373.627→A:428453.283→N:558138.912→E:124°50′4.5″→F:0→P:-1/180→Q:67.222→L:K≤A+L=>Goto 1:Stop(第一缓和曲线,圆半径为180)第6行:Lbl 1:Prog “XYF”A——曲线段起点的里程N——曲线段起点的x坐标E——曲线段起点的y坐标F——曲线段起点的坐标方位角P——曲线段起点的曲率(左负右正)Q——曲线段终点的曲率(左负右正)L——曲线段长度(尽量使用长度,为计算断链方便)说明:(1)在9860中,程序中所有公式和部分函数结果均存储在ListAns列表数组中,要想多次调用最好随公式取出结果,并赋给变量。
5800交点法正反算程序
If N=1: T hen Goto 5: Else prog
“ Z:SXH”
Goto 6: If end ↙
LbI5: “ X” ?M: “ YP”rog?Z “ FSXH” : Goto 7: If en↙d选择反算后输入测点的 X,Y 假设里 程与正算输入一起,无需另输入 LbI6 : “ W” ?W求边桩输入边距 左=”◢:X显示所求 X 值 Y+WSin(P+90) → Y: “ Y=”◢ :Y显示所求 Y 值 P<0 => P+360 → P: “ FW=◢” :P显示所求点切线方位角 Goto 4 LbI7: “ KCD=” :◢K 显示反算出的里程 “ W=” :W◢ 显示反算出的边距 Goto 4↙
子程序 “C” X+Z[1]*cos( O) →X↙ Y+Z[1]*sin( O) →Y↙ Return↙
圆曲线要素计算子程序 “D” L*180 ÷ ( ∏ R) →↙N 2R*sin(N ÷ 2) → Z[1↙] P+(Abs(S) ÷ S)(N ÷ 2O)↙→ P+Abs(S) ÷ S→↙P Return↙。。。。。
反算循环子程序 “FSXH” LbI 0: prog “ ZSX↙H” PoL((M-X),(Z-Y)) ↙ I*cos(J- P) →N↙ I*sin(J- P) →W↙ If N<0.00 1: Then N+K → K:Return: Else K+N → K:Goto 0: If e↙nd Return↙
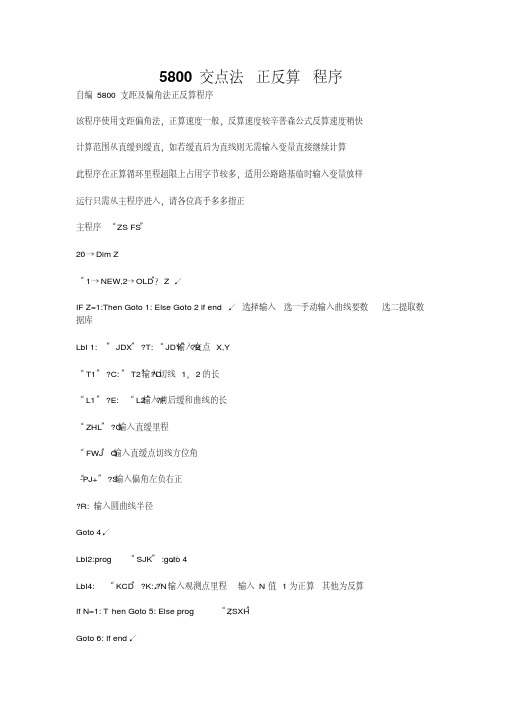
主程序 “ZS FS”
20→ Dim Z
“ 1→ NEW,2→ OLD”? Z ↙
IF Z=1:Then Goto 1: Else Goto 2 if end ↙ 选择输入 选一手动输入曲线要数 选二提取数 据库
5800公路坐标正反算程序(线元法数据输入)
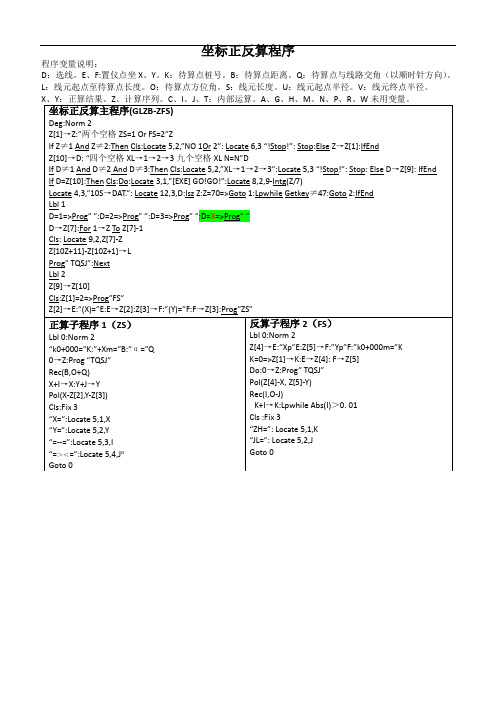
坐标正反算程序程序变量说明:D:选线。
E、F:置仪点坐X、Y。
K:待算点桩号。
B:待算点距离。
Q:待算点与线路交角(以顺时针方向)。
L:线元起点至待算点长度。
O:待算点方位角。
S:线元长度。
U:线元起点半径。
V:线元终点半径。
程序运行内容说明:开机运行程序后,1、进入主程序,选择正算或反算,1为正算,2为反算。
2、选择线路,1为第线。
2为第线。
3为第线等等。
3、如果上一次计算过的话提示是不更新数线路参数,十秒钟不操作更新,按EXE不更新。
如果上一次不是计算现在要计算的线路的话直接更新数据库(数据库更新会倒计时提示)。
3、正算。
提示入入置仪点坐标。
提示输入待算点桩号。
提示输入离中桩距离。
提示输入与线路方向夹角。
结果:坐标X、Y。
距置仪点距离和方位角。
再次提示输入待算点桩号。
反算。
提示输入实测点坐标X、Y。
结果:待算点桩号程距中桩距离。
再次提示输入实测点坐标X、Y。
程序特点:1、输入参数少,只要输入线路起点的桩号、半径、方位角、XY坐标以及各线元的桩号和半径(左+右-直线×1045)即可。
2、调用变量少,本程还有A、G、H、M、N、P、R、W字母变量未使用,可以用于其它程序而不会和本程序产生冲突。
3、数据库独立,更换工程时数据更换方便。
4、界面友好,尽量做到人人都容易上手,操作一学就会。
5、程序尽量运用5800计算器各种指令,使程序速度提高。
并能够起到帮助大家学习5800各指令工作原理,以便更好掌握编程。
Casio5800交点法与线元法(积木法)匝道坐标正反算放样程序

Casio5800交点法与线元法(积木法)匝道坐标正反算放样程序(XUFENG 2011.2.14)本人一直以来想找一个交点法与线元法相结合的坐标正反算程序,在网上找了很久很久,没能找到一个较为满意的,有幸在测量空间看到大歪哥的《Casio5800交点法程序》与《线元法(积木法)匝道坐标正反算放样程序》,根据歪哥意见“需要的自行修改结合XY框架自己修改为数据库反算程序等”,本人不才,采用最笨的办法将两个程序综合了一下,使之能既能进行交点法正反算,又能进行线元法正反算。
在此特别感谢大歪哥!将程序发上来,愿与大家一同交流学习欢迎大家吐口水,只要能进步就行!程序由一个主程序ZBZFS和8个子程序(JS、XY-A、XY-B、JDYS、1、2、3、4)构成,运行时只需运行主程序即可!本程序适用于单交点对称型、不对称型、无缓和曲线单圆曲线型一个交点范围内(含交点前后有直线段时)的曲线要素核对和坐标正反算,手工输入要素,对设计图纸的“直线、曲线转角表”中交点数据进行复核验证,并能对单一线元进行坐标正反算。
1主程序名:ZBZFS(功能:进入计算主程序)65→Dimz↙Deg:Fix 3↙"1.JD ZFS 2. ZHADAO ZFS"? I: I→Z[61]: "1.ZHONG SHU JS 2. JS"? I↙If I=1: Then Goto1: Else Goto2:IfEnd↙LbI 1 :If Z[61]=1: Then Prog"JDYS":Else Cls:"K0"?A:"KN"?L :"X0"?U :"Y0"?V :"F0"?W :"R0"?P :"RN"?Q:"ZX:-1,+1,0"?G:IfEnd↙LbI 2 :Prog"JS"2子程序名:JS(功能:选择正算或反算模式)Cls:"XC"?H:"YC"?Z↙Cls:"1.ZS 2.FS"? I: I=2=>Goto 3↙LbI 1 : Cls: If Z[61]=1: Then"JD ZS KX+XXX"?K :Prog"4": Else "ZHADAO ZS KX+XXX"?K :IfEnd↙LbI 2: Cls:90→B: Cls:"RJ Or 0 To K"?B:B=0 =>Goto 1:"Z"?T↙Prog "XY-A"↙X+Tcos(M+B)→X↙Y+Tsin(M+B)→Y↙360Frac((M+360)÷360→M↙Pol(X-H,Y-Z : 360Frac((J+360)÷360→J↙2→O: Prog "XY-B":Goto 2↙LbI 3 : Cls: If Z[61]=1: Then"JD FS KN+"?K:"X"?C:"Y"?D:Prog"4":Else Cls: "ZHADAO FS":"X"?C:"Y"?D:IfEnd↙LbI 4 :Prog "XY-A"↙(D-Y)sin(M)+(C-X)cos(M)→H↙If Abs(H)>X10-3 :Then K+H→K:Goto 4:IfEnd↙(D-Y)÷cos(M)→T↙3→O: Prog "XY-B":Goto 3↙3子程序名: XY-A(功能:坐标计算程序)5→N: G(Q-1-P-1)÷Abs(L-A)→F: Abs(K-A)÷N→R: 90R÷π→S:W+(FNR+2GP-1)NS→M:1→E↙U+R÷6×(Cos (W)+Cos (M) +4∑(Cos (W+((E+0.5)FR+2GP-1)×(E+0.5)S),E,0,(N-1))+2∑(Cos (W+((EFR+2GP-1)ES,E,1,(N-1)))V+R÷6×(sin (W)+sin (M) +4∑(sin (W+((E+0.5)FR+2GP-1)×(E+0.5)S),E,0,(N-1))+2∑(sin (W+((EFR+2GP-1)ES,E,1,(N-1)))→Y↙4子程序名: XY-B(功能:显示正算或反算结果)If O=2:Then↙Cls :"K×××=":"Z=":"X=":"Y=": Locate 6,1, K : Locate 4, 2, T : Locate 4,3, X : Locate 4,4, Y◢If T=0 :Then Cls :"QF(Z)=": Locate 8,1, M:M▼DMS◢I fEnd↙Cls :"K×××=":"S=": Locate 6,1, K : Locate 4, 2, I :"F=":J:J▼DMS◢IfEnd↙If O=3:Then "X=":"Y=":"K×××=":"Z=": Locate 4,1,C: Locate 4, 2, D : Locate 6,3,K :Locate 4,4,T◢IfEnd:Cls↙5子程序名:4(功能:将交点参数转为线元计算参数)LbI 1: IF Z[48]<0 :Then -1→Z[62] : Else:1→Z[62]:IfEndLbI 2: If K≥Z[57]:Then Z[57]→A:Z[1]→L:Z[23]→U:Z[24]→V : Z[31]→W : 10^45→P:10^45→Q : 0→G:IfEnd↙LbI 3:If K≥Z[1]:Then Z[1]→A : Z[2]→L : Z[19]→U : Z[20]→V:Z[29]→W : 10^45→P:Z[46]→Q : Z[62]→G: IfEnd↙LbI 4:If K≥Z[2]:Then Z[2]→A: Z[4]→L:Z[25]→U : Z[26]→V:Z[32]→W : Z[46]→P: Z[46]→Q : Z[62]→G: IfEnd↙LbI 5:f K≥Z[4]:Then Z[4]→A : Z[5]→L : Z[27]→U:Z[28]→V : Z[33]→W : Z[46]→P: 10^45→Q : Z[62]→G: IfEnd↙LbI 6:If K≥Z[5]:Then Z[5]→A : Z[5]+1000→L:Z[21]→U : Z[22]→V : Z[30]→W:10^45→P :10^45→Q : 0→G : IfEnd↙6子程序名:JDYS(功能:输入交点要素、显示交点要素及主点Cls : "BP"?H:H→Z[57]:"K(JD)"?K:K→Z[41] :"X (JD)"?X :X→Z[42]:"Y(JD)"?Y:Y →Z[43]:"LS1"?B:B→Z[44] :"LS2"?C:C →Z[45]: ?R:R →Z[46]:"(ZH)FWJ°"?M:M→Z[47] : "α(Z-,Y+)°"?O:O→Z[48] : Z[47]+Z[48]→Z[49]: Prog "1":Prog "2"↙Cls :"T1=":"T2=":"L=":"LY=": Locate 4,1, Z[50] : Locate 4,2, Z[51]: Locate 4,3, Z[52] : Locate 4,4, Z[53]◢Cls :"E=": Locate 7,1, Z[54]Cls :"K(QD)=": "X=": "Y=": "FWJ="Locate 7,1,Z[57] :Locate 7,2, Z[23] :Locate 7,3, Z[24] :Locate 7,4, Z[31] ◢Cls :"K(ZH)=": "X=": "Y=": "FWJ=":Locate 7,1,Z[1] : Locate 7,2, Z[19] :Locate 7,3, Z[20] :Locate 7,4, Z[29]◢Cls : "K(HY)=": "X=": "Y=": "FWJ=": Locate 7,1,Z[2] : Locate 7,2, Z[25] :Locate 7,3, Z[26] :Locate 7,4, Z[32]◢Cls :"K(QZ)=": Locate 7,1,Z[3]◢Cls :"K(YH)=": "X=": "Y=": "FWJ=": Locate 7,1,Z[4] : Locate 7,2, Z[27] :Locate 7,3, Z[28] :Locate 7,4, Z[33]◢Cls :"K(HZ)=": "X=": "Y=": "FWJ=": Locate 7,1,Z[5] : Locate 7,2, Z[21] :Locate 7,3, Z[22] :Locate 7,4, Z[30]◢7子程序名: 1(功能:计算交点要素)If Z[48]<0 :Then -1→Z[55] : Else 1→Z[55] : IfEnd : Z[55]* Z[48]→Z[56] ↙Z[44] 2 ÷24÷Z[46]- Z[44]^(4)÷2688÷Z[46] ^(3) →Z[6] ↙Z[45] 2 ÷24÷Z[46]- Z[45]^(4)÷2688÷Z[46] ^(3) →Z[7] ↙Z[44]÷2-Z[44]^(3)÷240÷Z[46]2 →Z[8] ↙Z[45]÷2-Z[45]^(3)÷240÷Z[46]2 →Z[9] ↙Z[8]+(( Z[46]+Z[7]-( Z[46]+Z[6])cos(Z[56]))÷sin(Z[56]))→Z[50]↙Z[9]+(( Z[46]+Z[6]-( Z[46]+Z[7])cos(Z[56]))÷sin(Z[56]))→Z[51]↙Z[46]* Z[56]π÷180+( Z[44]+ Z[45]) ÷2→Z[52]↙Z[46]* Z[56]π÷180-( Z[44]+ Z[45]) ÷2→Z[53]↙(Z[46]+(Z[6]+Z[7])÷2)÷cos(Z[56]÷2)- Z[46]→Z[54]↙Z[41]-Z[50]→Z[1] ↙↙Z[1]+Z[44]→Z[2] ↙↙Z[2]+Z[53]÷2→Z[3]↙Z[1]+Z[52]-Z[45]→Z[4]↙Z[4]+Z[45]→Z[5]↙8子程序名: 2(功能:计算主点坐标及切线方位角)Z[42]-Z[50]cos(Z[47])→Z[19]: (直缓坐标)Z[43]-Z[50]sin(Z[47])→Z[20]↙Z[47]→Z : 360Frac((Z+360)÷360→Z[29] (方位角)Z[42]+Z[51]cos(Z[49])→Z[21]: (缓直坐标)Z[43]+Z[51]sin(Z[49])→Z[22]↙Z[49]→Z: 360Frac((Z+360)÷360→Z[30] (方位角)Z[1]-Z[57]→L↙(H→Z[57]为前直线起点桩号)Z[42]-( Z[50]+L)cos(Z[47])→Z[23]↙ (前直线起点坐标)Z[43]-( Z[50]+L)sin(Z[47])→Z[24]↙Z[47]→Z : 360Frac((Z+360)÷360→Z[31]↙(方位角)Z[44]→Z[12]:Z[44]→Z[13]:Prog"3"↙Z[4]-Z[1]→L:90(2L-Z[44])÷Z[46]÷π→Z[11]↙Z[46]sin(Z[11])+Z[8]→Z[14]:Z[46](1-cos(Z[11]))+Z[6]→Z[15]↙Z[19]+Z[14]cos(Z[47])-Z[55]Z[15]sin(Z[47])]→Z[27]↙(圆缓点坐标)Z[20]+Z[14]sin(Z[47])+Z[55]Z[15]cos(Z[47])]→Z[28]↙Z[47]+Z[55]Z[11]→Z: 360Frac((Z+360)÷360→Z[33]↙(方位角)Z[2]-Z[1]→L:90(2L-Z[44])÷Z[46]÷π→Z[58]↙Z[46]sin(Z[58])+Z[8]→Z[14]:Z[46](1-cos(Z[58]))+Z[6]→Z[15]↙Z[19]+Z[14]cos(Z[47])-Z[55]Z[15]sin(Z[47])]→Z[25]↙(缓圆点坐标)Z[20]+Z[14]sin(Z[47])+Z[55]Z[15]cos(Z[47])]→Z[26]↙Z[47]+Z[55]Z[58]→Z: 360Frac((Z+360)÷360→Z[32]↙(方位角)9子程序名: 3(主点坐标计算辅助程序)If Z[12]=0 :Then 0→Z[14]: 0→Z[15]:Else↙Z[12]- Z[12]^(5)÷40÷(Z[46]*Z[13])2+ Z[12]^(9)÷3456÷(Z[46]*Z[13])^(4) →Z[14]↙Z[12]^(3)÷6÷(Z[46]*Z[13])-Z[12]^(7)÷336÷(Z[46]*Z[13])^(3)+ Z[12]^(11) ÷42240÷(Z[46]*Z[13])^(5)→Z[15] ↙IfEnd↙程序说明:1、进入程序:1.JD ZFS 2. ZHADAO ZFS? 选1为交点法正反算(以后操作均为交点法计算),选2为线元法正反算(以后操作均为线元法计算)2、ZHONG SHU JS 2. JS?选1重输参数,选2直接进入交点法或线元法正反算(参数为已输过的参数)3、参数输入:一、交点法已知数据输入:BP?上一交点ZH桩号K(JD)?交点桩号X(JD)?交点X坐标Y(JD)?交点Y坐标LS1 ?第一缓和曲线长度LS2 ?第二缓和曲线长度R ? 圆曲线半径(ZH)FWJ°?交点前(即前交点至本交点也即ZH点)的正切线方位角α(Z-,Y+)?本交点处线路转角(左转为负,右转为正,度分秒输入)交点法计算要素显示:T1=第一切线长T2=第二切线长L=曲线总长LY=圆曲线长E=曲线外距K(ZH)=直缓点桩号K(HY)=缓圆点桩号K(QZ)=曲中点桩号K(YH)=圆缓点桩号K(HZ)=缓直点桩号二、线元法已知数据输入:K0? KN? R0? RN?F0?X0? Y0?ZX? 分别为线元起点桩号、终点桩号、起点半径、终点半径、起点切线方位角、起点X坐标、起点Y 坐标、线元转向。
非常好的5800坐标正反算程序
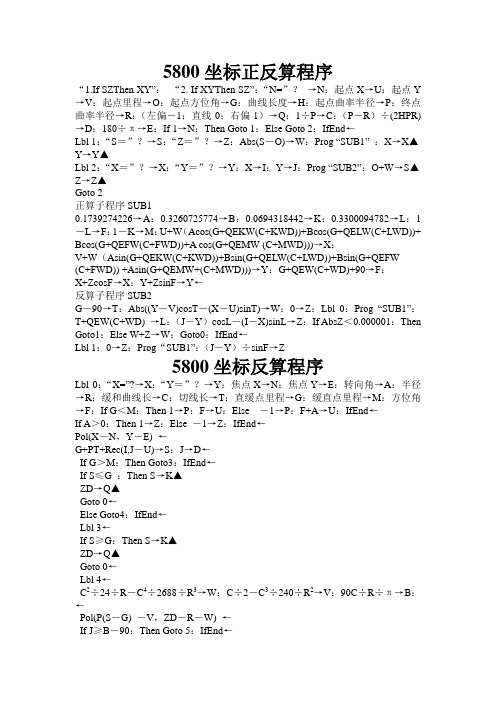
5800坐标正反算程序“1.If SZThen XY”:“2. If XYThen SZ”:“N=”?→N:起点X→U:起点Y →V:起点里程→O:起点方位角→G:曲线长度→H:起点曲率半径→P:终点曲率半径→R:(左偏-1;直线0;右偏1)→Q:1÷P→C:(P-R)÷(2HPR)→D:180÷π→E:If 1→N:Then Goto 1:Else Goto 2:IfEnd←Lbl 1:“S=”?→S:“Z=”?→Z:Abs(S-O)→W:Prog “SUB1”:X→X▲Y→Y▲Lbl 2:“X=”?→X:“Y=”?→Y:X→I:Y→J:Prog “SUB2”:O+W→S▲Z→Z▲Goto 2正算子程序SUB10.1739274226→A:0.3260725774→B:0.0694318442→K:0.3300094782→L:1-L→F:1-K→M:U+W(Acos(G+QEKW(C+KWD))+Bcos(G+QELW(C+LWD))+ Bcos(G+QEFW(C+FWD))+A cos(G+QEMW (C+MWD)))→X:V+W(Asin(G+QEKW(C+KWD))+Bsin(G+QELW(C+LWD))+Bsin(G+QEFW(C+FWD)) +Asin(G+QEMW+(C+MWD)))→Y:G+QEW(C+WD)+90→F:X+ZcosF→X:Y+ZsinF→Y←反算子程序SUB2G-90→T:Abs((Y-V)cosT-(X-U)sinT)→W:0→Z:Lbl 0:Prog “SUB1”:T+QEW(C+WD) →L:(J-Y)cosL-(I-X)sinL→Z:If AbsZ<0.000001:Then Goto1:Else W+Z→W:Goto0:IfEnd←Lbl 1:0→Z:Prog“SUB1”:(J-Y)÷sinF→Z5800坐标反算程序Lbl 0:“X=”?→X:“Y=”?→Y:焦点X→N:焦点Y→E:转向角→A:半径→R:缓和曲线长→C:切线长→T:直缓点里程→G:缓直点里程→M:方位角→F:If G<M:Then 1→P:F→U:Else -1→P:F+A→U:IfEnd←If A>0:Then 1→Z:Else -1→Z:IfEnd←Pol(X-N,Y-E) ←G+PT+Rec(I,J-U)→S:J→D←If G>M:Then Goto3:IfEnd←If S≤G :Then S→K▲ZD→Q▲Goto 0←Else Goto4:IfEnd←Lbl 3←If S≥G:Then S→K▲ZD→Q▲Goto 0←Lbl 4←C2÷24÷R-C4÷2688÷R3→W:C÷2-C3÷240÷R2→V:90C÷R÷π→B:←Pol(P(S-G) -V,ZD-R-W) ←If J≥B-90:Then Goto 5:IfEnd←P(S-G)+P(S-G)5÷40÷R2÷C2→Z←Z3÷(6RC) →H←If A>0:Then D-H→W:Else -D-H→ W:IfEnd←If RC≤2WC:Then RC÷W→Z:Else(RC-√(R2C2-2RCWZ)) ÷W→Z:IfEnd←G+PZ→K▲K-PZ5÷(40R2C2) →V:Z3÷(6RC) →H←If A<0:Then -1→Z:Else 1→Z:IfEnd←√((S-V)2+(ZD-H)2) →W←If ZD≥H:Then W→Q▲Else -W→Q▲IfEnd←Goto 0←Lbl 5←(90+J)π÷180-C÷2R→J←If RJ≥P(M-G) -2C:Then Goto 6:IfEnd←G+P(C+JR) →K▲R-I→Q▲Goto 0←Lbl 6←Pol(P(S-G) -T,ZD) ←M-P(T-Rec(I,J-AbsA)) →O←If G>M:Then Goto 7:IfEnd←If O>M:Then O→K▲J→O▲Goto 0←Else Goto 8:IfEnd←Lbl 7←If O≤M:Then O→K▲J→Q▲IfEnd←Goto 0←Lbl 8←P(M-O)+P(M-O)5÷(40R2C2) →Z←Z3÷(6RC)) →H←J-H→W←If RC≤2WZ:Then RC÷W→Z:Else(RC-√(R2C2-2RCWZ)) ÷W→Z:IfEnd ←M-PZ→K▲K+PZ5÷(40R2C2) →V:Z3÷(6RC) →H:√((O-V)2+(J-H)2)→W←If J≥H:Then W→Q▲Else -W→QIfEnd←Goto 0←。
5800交点正反算坐标(可计算不对称缓和曲线)
1、主程序程序名:1XY-KMLbI 0:5→DimZ:Norm 2:1→A:"A:X,Y=1,KM,D=2"?A:A=1=>Goto 1:A=2=>Goto 2:LbI 1:Prog "DX":LbI A:Prog"QX":90→B:"PJ"?B:B→Z [1]:LbI B:1→F:"KM"?Z:Z= -1=>Goto 0:Z=-2=>Goto A:Z=-3=>Goto X :Prog"KM":?D: Prog "Z":I+D×COS(Z[2]+Z[1]) →X: J+D×Sin(Z[2]+Z[1]) →Y: Fix 3:"X=":Locate 6,4,X:"Y=":Locate 6,4,Y:Prog"JS":Goto B LbI 2:LbI A:Prog"QX":90→Z[1]:LbI C:2→F:"KM"?Z:Z = -1=>Goto 0:Z=-2=>Goto A:Z=-3=>Goto X :Prog"KM"“X0”? X:”Y0”?Y:?D:Prog "ZX": Fix 3:"KM=":Locate 6, 4,Z:"D=":Locate 6,4,D:Goto C:LbI X:Mat F◢Goto 02. 交点法正算子程序(Z)程序名:ZH2÷R÷24-H∧(4)÷2688÷R∧(3)→A:H÷2-H∧(3)÷240÷R2→B:((H2-N2)÷24÷R)÷Sin(Abs(P))-((H∧(4)-N∧(4))÷2688÷R ∧(3)) ÷Sin(Abs(P))→E:(R+A)tan(Abs(P)÷2)+B-E→T:P÷Ab s(P) →W:0→M:H→C:If Z≤O-T:Then Z-O→S:G→Z[2]:Goto 2: IfEnd:If Z≤O-T+H:Then Z-O+T→S:Prog “HX”:G+WK→Z[2]:Goto 4:IfEnd:If Z≤O-T+ΠR×Abs(P)÷180+H÷2-N÷2: Then 180(Z-O+T-0. 5H) ÷R÷Π→S : A+R(1-Cos(S))→B:H÷2-H∧(3) ÷240÷R2+Rsin(S)→A:R→M:G+WS→Z[2]:Goto 4: IfEnd:O-T+ΠR×Abs(P)÷180+H÷2+N÷2-Z→S:(R+N2÷R÷24-N∧(4)÷2688÷R∧(3))tan(Abs(P) ÷2)+N÷2-N∧(3) ÷240÷R2+E→T :N→H:Prog “HX”:G+P→S:S-WK→Z[2]:U+(T-A)Cos(S)-WBSi n(S)→I:V+(T-A)Sin(S)+WBcos(S)→J:Goto 3:LbI 4:U+(A-T)cos(G)-WBsin(G)→I:V+(A-T)Sin(G)+WBcos(G) →J: Goto 3:LbI 2:U+Scos(Z[2])→I:V+Ssin(Z[2]) →J: LbI 3:C→H3. 交点法缓和段转化子程序(HX)程序名:HXS-S∧(5) ÷40÷R2÷H2+S∧(9) ÷3456÷R∧(4) ÷H∧(4)→A:S∧(3)÷6÷R÷H-S∧(7) ÷336÷R∧(3) ÷H∧(3)+S∧(11) ÷42240÷R ∧(5) ÷H∧(5)→B:90S2÷Π÷R÷H→K:RH÷S→M4. 交点法反算子程序(ZX)程序名:ZXZ:0→D:LbI 0:Prog “Z”:Pol(X-I,Y-J):J-Z[2] →J:Isin(J) →S:Icos(J) →I:If Abs(I)<0.1:Then Z+I→Z:S→D:Goto 2:Else Goto 1: LbI 1:If M=0:Then Z+I→Z:Goto 0:Eles Pol(M-WS,I):(JMΠ)/180→I:Z+I→Z:Goto 0:IfEndLbI 25.线路选择子程序(线路选择输0时。
5800交点法计算中边桩坐标程序
交点法正反算程序主程序JD—NELBI 1:"JDk="?C:"JDμ="?D:"Li"?L:"R="?R:"JDX="?U:"JDY="?V:"JDA="?A:"(+1R,-1L)"?M:"Z(+R,—L)"?B:"K="?P:Prog:"JD—NE1":"X="?X"▲Y="?Y▲"F="?F▲Goto 1↙子程序JD—NE1((R+L²÷(24R))tan(D÷2)+L÷2—L³÷(240R²)→T↙C—T→I↙I+L→J↙J+πDR÷180—L→H↙H+L→K↙If P<I:Then U+(C-P)cos(A+180°)+Bcos(A+90°)→X ↙V+(C-P)sin(A+180°)+Bsin(A+90°)→Y↙A→F:Return:IfEnd↙If P>I And P<J :Then A+M×30°×(P—I)²÷(πRL)→O↙(P—I)—(P—I)²÷(90R²)→G↙U+Tcos(A+180°)+Gcos(O)→X↙V+Tsin(A+180°)+Gsin(O)→Y↙90°×(P—I)²÷(πRL)→W↙X+Bcos(A+MW+90°)→X↙Y+Bsin(A+MW+90°)→Y↙A+MW→F:Return:IfEnd↙If P>J And P<H :Then A+M×90°×(L+P—J)÷(πR)→O↙2Rsin((P—J)×90°÷(πR))→G↙U+Tcos(A+180°)+(L—L³÷(90R²))cos(A+M(30°×L)÷(πR))+Gcos(O)→X↙V+Tsin(A+180°)+(L—L³÷(90R²))sin(A+M(30°×L)÷(πR))+Gcsin(O)→X↙90°×(P—J)÷(πR)→W↙X+Bcos(O+MW+90°)→X↙Y+Bsin(O+MW+90°)→Y↙O+MW→F:Return:IfEnd↙If P>HAnd P<K :Then A+MD+180°—M×30°×(P—K)²÷(πRL)→O↙K—P—(K—P)³÷(90R²)→G↙U+Tcos(A+MD)+Gcos(O)→X↙V+Tsin(A+MD)+Gsin(O)→Y↙(P—K)²×90°÷(πRL)→W↙X+Bcos(A+MD—MW+90°)→X↙Y+Bsin(A+MD—MW+90°)→Y↙A+MD—MW→F:Return:IfEnd↙If P>K :Then U+(T+P—K)cos(A+MD)+Bcos(A+MD+90°)→X↙V+(T+P—K)sin(A+MD)+Bsin(A+MD+90°)→Y↙A+MD→F:Return:IfEnd↙变量说明:JDk——交点桩号CJDμ——交点转角DLi——缓和曲线长度LR——圆曲线半径RJDX——交点X坐标UJDY——交点Y坐标VJDA——交点方位角A(+1R,—1L)——偏向MZ(+R,—L)——(边桩到中桩距离)BK——待求桩号PX——待求点X坐标Y——待求点Y坐标F——待求点的方位角本程序已经测试通过,第二缓和曲线起点附近有时会有1公分误差,是公式简化过程中产生的。
5800计算器全线坐标计算放样正反算程序
5800计算器全线坐标计算放样正反算程序(定稿)彭赐明主程序坐标正反算程序名称:ZBZFSLB1 A↙Cls : Fix 4 : 30→Dim Z :"0=ZS,1=FS"?Z ↙If Z=0:Then Goto B:IfEnd↙(Z=0进入里程点坐标正算)If Z=1:Then Prog"FSLCBZ ": Goto A:IfEnd↙(Z=1进入反算里程边桩)Lb1 B ↙“K=”?K :(计算里程)Prog"SJK1 ":Prog”ZBFY” :Goto A↙子程序数据库 SJK1IF K<本段曲线终点里程 AND K≥上段曲线终点里程:THEN 本段终点里程→Z[1] : 上段曲线终点里程→Z[2] :1→O(注:左偏曲线输入-1→O,右偏曲线输入1→O): 半径→R : 曲线偏角→A:第一缓和曲线→Z[6] : 第二缓和曲线→Z[7] : 交点X→B :交点Y→C : 小里程向交点方位角→E : 交点向大里程方位角→F : Prog”XLZBJSCX”:Return: IFEND↙IF…………Prog”XLZBJSCX”:Return:IFEND(曲线段分段输入)↙补充直线段输入如下(单独直线段)IF K<本段直线终点里程AND K≥本段直线起点里程:THEN 本段直线终点里程→Z[3]:终点X→Z[16]:终点Y→Z[17]:方位角→E: Z[16]+ (K- Z[3])*COS E→Z[18]:Z[17]+ (K- Z[3])*SIN E→Z[19] : Return:IFEND子程序坐标正算,名称:XLZBJSCXLB1 2 ↙(曲线要素计算)Z[6]/2- Z[6]^3/(240*R^2)+ Z[6]^5/(34560*R^4) →Z[8] ↙(M1)Z[7]/2- Z[7]^3/(240*R^2)+ Z[7]^5/(34560*R^4) →Z[9] ↙(M2)Z[6]^2/(24*R)- Z[6]^4/(2688*R^3) →Z[10] ↙(P1)Z[7]^2/(24*R)- Z[7]^4/(2688*R^3) →Z[11] ↙(P2)π*A*R/180+0.5*( Z[6]+ Z[7])→Z[25] ↙(曲线总长)90* Z[6]/(R*π) →Z[14] ↙(第一缓和曲线总偏角)90* Z[7]/(R*π) →Z[15] ↙(第二缓和曲线总偏角,可以省略)Z[8]+(R+Z[10])TAN(A/2)-(Z[10]-Z[11] )/SIN A→Z[12]↙(切线T1)Z[9]+(R+Z[11])TAN(A/2)+(Z[10]-Z[11] )/SIN A→Z[13]↙(切线T2)B+ Z[12]*COS (E+180)→ Z[16] ↙(ZH点X)C+ Z[12]*SIN(E+180)→ Z[17] ↙(ZH点Y)Z[1]- Z[25]→Z[3] ↙(ZH点里程)Z[3]+ Z[6]→Z[4] ↙(HY点里程)Z[1]- Z[7]→Z[5] ↙(YH点里程)GOTO 3 ↙LB1 3 ↙(判断里程点与曲线关系)IF K≤Z[3] AND K> Z[2] : THEN GOTO 4 : IFEND ↙IF K≤Z[4] AND K> Z[3] : THEN GOTO 5 : IFEND ↙IF K≤Z[5] AND K> Z[4] : THEN GOTO 6 : IFEND ↙IF K≤Z[1] AND K> Z[5] : THEN GOTO 7 : IFEND ↙LB1 4 ↙(里程小于直缓点直线独立坐标)K- Z[3] →Z[23] : 0→Z[24] : E→T : GOTO 8↙LB1 5 ↙(第一缓和曲线独立坐标)K- Z[3] →H ↙H-H^5/(40*R^2* Z[6]^2)+H^9/(3456*R^4* Z[6]^4) →Z[23] ↙H^3/(6*R* Z[6])-H^7/(336*R^3* Z[6]^3) →Z[24] ↙90*H^2/( R*π* Z[6]) →T ↙IF O>0 :THEN T +E→T : ELSE E-T →T : T<0=>360+T→T : IFEND ↙GOTO 8 ↙LB1 6 ↙(圆曲线独立坐标)K- Z[4] →H ↙H*180/( R*π)+ Z[14]→T ↙R*SIN T+ Z[8]→Z[23] ↙R*(1-COS T)+ Z[10]→Z[24] ↙IF O>0 :THEN T +E→T : ELSE E-T →T : T<0=>360+T→T : IFEND ↙GOTO 8 ↙LB1 7 ↙(第二缓和曲线独立坐标)Z[1] -K →H ↙H-H^5/(40*R^2* Z[7]^2)+H^9/(3456*R^4* Z[7]^4) →U↙H^3/(6*R* Z[7])-H^7/(336*R^3* Z[7]^3) →V ↙90*H^2/( R*π* Z[7]) →T ↙Z[13]COS A+ Z[12]-U*COS A-V*S IN A→Z[23] ↙Z[13]*SIN A-U*SIN A+V*COS A→Z[24]↙IF O>0 :THEN F-T→T : T<0=>360+T→T : ELSE F+T →T : IFEND ↙GOTO 8 ↙LLb1 8IF O<0 : THEN - Z[24]→Z[24] : IFEND ↙Z[16]+Z[23]*COS E-Z[24]*SIN E→Z[18] ↙Z[17]+Z[23]*SIN E+Z[24]*COS E→Z[19] ↙ReTurn↙子程序反算里程边桩,名称:FSLCBZLb1 1↙"XK="?X:"YK="?Y↙(输入任意测点的XY坐标):“K=”?K (试算里程,任意输入标段内里程点即可,也可以输入大致的估算里程加快速度)↙Lb1 2↙Prog"SJK1 ":T-90 →W:W<0=>360+W→W:Abs((Y-Z[19])*Cos W-(X-Z[18])*Sin W)→S↙If S<0.0001:Then Goto 4:Else Goto 3:Ifend↙Lb1 3↙K+S→K: Prog"S JK1":T-90 →W:W<0=>360+W→W:Abs((Y-Z[19])*Cos W-(X-Z[18])*Sin W)→Q↙If Q<0.0001 :Then Q→S: Goto 4:Else IF Q<S: THEN K+Q→K: Goto 2 :Else IF Q>S :THEN K-Q→K:G oto 2:Ifend:Ifend:Ifend↙Lb1 4↙Pol (X-Z[18],Y-Z[19]:"DP(-Z+Y)=":I◢(偏距)(由于该程序不能准确判断边桩左右方向,暂作修改,取消左右边判定)"K=":K+S→K◢(里程)Return↙子程序坐标放样:ZBFYLB1 0 ↙“XHS="?G(后视点X):"YHS="?L(后视点Y):"XZJ="?M(置镜点X):"YZJ="?N(置镜点Y):Pol(G-M,L-N):"DH=":I(后视距)◢J<0=>J+360→J:"FH=":J→DMS◢(后视方位角) “QXJ=” :T◢(计算里程点切线方位角,可以不显示)“XI=” : Z[18] ◢(中线X)“YI=” : Z[19] ◢(中线Y)Pol(Z[18]-M,Z[19]-N):"DI=":I(中桩放样距)◢J<0=>J+360→J:"FI=":J→DMS◢(中桩放样方位角)“PJ=”?P◢(输入边桩与线路夹角,左-右+)“PD=”?D◢(输入边桩距)Z[18]+D*COS(T+P) →Z[20] ↙Z[19]+D*SI N(T+P) →Z[21] ↙“XP=”: Z[20] ◢(边桩X)“YP=”: Z[21] ◢(边桩Y)Pol(Z[20]-M,Z[21]-N):"DP=":I◢(边桩放样距)J<0=>J+360→J:"FP=":J→DMS◢(边桩放样方位角)Return↙。
5800 坐标正算程序、坐标反算程序
CASIO FX-5800 P坐标正算反算
坐标正算
Lbl 0: “X0=”?S:“Y0=”?K
“FWJ=”?F:“JL=”?D
“JSZB X=”:S+Dcos(F)→X◢
“JSZB Y=”:K+Dsin(F)→Y◢
Goto 0
坐标反算
Lbl 0:“X1=”?Z:“Y1=”?W
“X2=”?X:“Y2=”?Y
X-Z→A:Y-W→B
“JULI D”:√(A²+B²)→D◢“FWJ”:cos-1(A÷D) →J
IF B≥0:Then J→J:J►DMS◢
Else 360-J→J:J► DMS◢
IfEnd
Goto 0
坐标正算说明:
1.已知一个点的坐标X、Y,方位角和距离,计算未知点坐标
2.计算中桩是用靠近待求点的小里程的X、Y坐标,方位角,以及待求点到已知点的距离,
计算出待求点X、Y坐标
3.计算边桩坐标时,先求出待求点的坐标,然后输入待求点(要计算的里程)的X、Y坐
标,计算时距离输入永远为正值,左侧用计算里程方位角-90°,如果出现负值,则再加上360°(即方位角-90°+360°);右侧则直接用方位角+90°
坐标反算说明:
1.已知两个点的X、Y坐标,计算出两点间的距离和方位角
2.输入时先输入小里程的X、Y坐标再输入大里程方向的X、Y坐标,与先输入大里程后
输入小里程的坐标,计算结果为相反方向!。
5800坐标计算及反算

5800坐标计算及反算交点法是一种常用的地理坐标计算方法,通过已知的两个点的坐标和与x轴的夹角来计算第三个点的坐标。
同时,我们也可以通过已知两个点的坐标和第三个点的坐标,反过来计算与x轴的夹角。
以直角坐标系为例,假设已知两个点A(x1,y1)和B(x2,y2),并假设与x轴的夹角为θ1与θ2、现在我们要计算第三个点C的坐标。
根据三角函数的知识,我们可以得到:∆x = AC = BC * cos(θ1)∆y = BC * sin(θ2)因此:x3 = x2 + ∆x = x2 + BC * cos(θ1)y3 = y2 + ∆y = y2 + BC * sin(θ2)反算坐标的过程与上述相反,假设我们已知三个点A,B和C的坐标,以及与x轴的夹角θ1和θ2、我们要计算BC的长度。
通过画图,我们可以得知:BC=√(∆x^2+∆y^2)其中∆x=x2-x1∆y=y2-y1在实际应用中,交点法常用于测量仪器的校准和数据处理。
例如,若已知两个点A(3,4),B(6,8),且与x轴的夹角θ1=30°和θ2=60°。
我们可以使用交点法计算点C的坐标。
∆x = BC * cos(θ1) =BC * cos(30°)∆y = BC * sin(θ2) = BC * sin(60°)根据已知条件x3 = 6 + BC * cos(30°)y3 = 8 + BC * sin(60°)进一步,我们可以通过三角函数的性质,确定BC的长度:BC=√(∆x^2+∆y^2)=√((x2-x1)^2+(y2-y1)^2)将具体数值代入计算可以得到最终结果。
交点法在实际中的应用十分广泛,如测量地面上其中一点到两个已知点的距离,计算建筑物或地理地点在地图上的坐标等等。
fx-5800p全线坐标放样(交点法)正反算程序
fx-5800p全线坐标放样(交点法)正反算程序fx-5800p全线坐标放样(交点法)正反算程序【QXFYZFS】(主程序名)20→Dim?〝1.ZS.2.FS〞?J:J≠1?Goto2:90→H:〝X(CZ)〞?U:〝Y(CZ)〞?V?Lbi1:〝Kp=〞?P:〝Z-Y+〞?D:Prog〝SUJUKU〞:M+O→N:Prog〝SUBA〞:Prog〝SUBB〞:F-Dcos(Z-H)→F:G-Dsin(Z-H)→G:〝X=〞〝Y=〞〝〞Z?DMS◢U=0?Goto1:Pol(F-U,G-V):J<0?360+J→J:〝DH〞〝〞J?DMS◢Goto1?Lbi2:〝GAILUE(Kp=)〞?P:〝X=〞?U:〝Y=〞?V?Lbi3:Prog〝SUJUKU〞:M+O→N:Prog〝SUBA〞:Prog〝SUBB〞:Z-90→A:(V-G)cos(A)-(U-F)sin(A)→H:IfAbs(H)>0.0001:ThenH+P→P:Goto3:IfEnd:(G-V)÷sin(A)→D〝=〞〝〞Goto2?使⽤说明:20→Dim:扩展额外变量寄存器〝1.ZS.2.FS〞:选择正反算(正算=1反算≠1)90→H:边桩与线路正交〝X(CZ)〞〝Y(CZ)〞:输⼊测站点X、Y坐标值〝Kp=〞、〝Z-Y+〞:输⼊所求点桩号和距中(左-右+中0)〝GAILUE(Kp=)〞:反算时,输⼊所求点概略桩号〝X=〞〝Y=〞:反算时,输⼊所求点X、Y坐标值〝X=〞〝Y=〞〝〞:显⽰所求点X、Y值及所求点切线⽅位⾓。
〝DH〞〝〞:显⽰所求点放样距离及放样⽅位⾓(放样)。
10.〝〞〝〞:反算时,显⽰所求点桩号及距中(左-右+中0)。
〝U=0?Goto1〞〝〞〝〞【SUBA】⼦程序AIfO<0:Then-1→W:Else1→W:IfEnd:WO→A?B2÷24÷R-B^(4)÷2688÷R^(3)+B^(6)÷506880÷R^(5)→Z[6]:C2÷24÷R-C^(4)÷2688÷R^(3)+C^(6)÷506880÷R^(5)→Z[7]:B÷2-B^(3)÷240÷R2+B^(5)÷34560÷R^(4)→Z[8]C÷2-C^(3)÷240÷R2+C^(5)÷34560÷R^(4)→Z[9]Z[8]+(R+Z[7]-(R+Z[6]cos(A))÷sin(A)→S:Z[9]+(R+Z[6]-(R+Z[7]cos(A))÷sin(A)→T:ARπ÷180+(B+C)÷2→L:L-B-C→Q:(R+(Z[6]+Z[7])÷2)cos(A÷2)-R→E:K-S→Z[1]:Z[1]+B→Z[2]:Z[1]+L-C→Z[4]:Z[4]+C→Z[5]【SUBB】⼦程序BX–Scos(M→F:Y-sin(M→G:P>Z[1]?Goto1:X→F:Y→G:P-K→Z[16]:0→Z[17]:M→A:M→Z:Goto5?Lbl1:P>Z[2]?Goto2:P-Z[1]→L:L→Z[14]:B→Z[15]:Prog〝SUBC〞:WZ[17]→Z[17]:M→A:M+90WL(BRπ→Z:Goto5:Lbl2:P>Z[4]?Goto3:P-Z[1]→L:90(2L-B)÷R÷π→A:Rsin(A)+Z[8]→Z[16]:W(R(1-cos(A))+Z[6]→Z[17]:M+WA→Z:M→A:Goto5:Lbl3:P>Z[5]?Goto4:Z[5]-P→L:L→Z[14]:C→Z[15]:Prog〝SUBC〞:X+Tcos(N→F:Y+Tsin(N→G:-Z[16]→Z[16]:WZ[17]→Z[17]:N→A:N-90WL2÷(CRπ→Z:Goto5:Lbl4:X→F:Y→G:P-Z[5]+T→Z[16]:0→Z[17]:N→A:N→Z:Goto5:Lbl5:F+Z[16]cos(A)-Z[17]sin(A→F:G+Z[16]sin(A)+Z[17]cos(A→G:Z<0?360+Z→Z【SUBC】⼦程序CIfZ[14]=0:Then0→Z[16]:0→Z[17]:ElseZ[14]-Z[14]^(5)÷40÷(RZ[15])2+Z[14]^(9)÷3456÷(RZ[15])^(4)→Z[16]:Z[14]^(3)÷6÷(RZ[15])-Z[14]^(7)÷336÷(RZ[15])^(3)+Z[14]^(11)÷42240÷(RZ[15])^(5)→Z[17]:IfEnd 【】IfP<1000:Then522.056→K:5683.105→X:1447.559→Y:183°17°55.68°→M:-19°37°25.5°→O:2500→R:0→B:0→C:Return:IfEnd?IfP<2000:Then1182.2→K:5317.799→X:868.262→Y:337°0°1.8°→M:10^(-50)→O:1→R:0→B:0→C:Return:IfEnd?IfP<3000:Then……0→B:0→C:Return:IfEnd?1182.2→K”。
5800(交点法)坐标计算及反算

5800(交点法)坐标计算及反算5800(交点法)坐标计算及反算程序清单:1、JDF1J-PQXYS(交点法1-平曲线要素)5→Dimz↙“JD”?A↙“JD X”?B↙“JD Y”?C↙“FWJ”?F↙“L(a-),R(a+)”?O↙(字母O)“R”?R↙“LS1”?E↙“LS2”?K↙If E<1:Then 1*10^(-9) →E:IfEnd↙If K<1:Then 1*10^(-9) →K:IfEnd↙E2 ÷(24R)- E^(4)÷(2688R^(3))→Z[1]↙E÷2-E^(3)÷(240R2)+E^(5)÷(34560R^(4))→Z[2]↙((E2-K2 )÷(24R))÷Sin(Abs(O))→X↙(字母O)“T1=”:(R+E2÷(24R)-E^(4)÷(2688 R^(3)))tan(Abs(O) ÷2)+E÷2-E^(3)÷(240R2)+E^(5)÷(34560R^(4))-X→Z[3] ◢(字母O) “T2=”:(R+K2÷(24R)-K^(4)÷(2688 R^(3)))tan(Abs(O) ÷2)+K÷2-K^(3)÷(240R2)+K^(5)÷(34560R^(4))+X→Z[4] ◢(字母O) “L=”:Abs(O)πR÷180+(E+K)÷2→L◢(字母O)“LY=”:L-(E+K)→Y◢tan-1((R+Z[1])÷(Z[3]-Z[2]))→J↙“E=”:(R+Z[1])÷sin(J)-R→X◢A-Z[3]→X:X+E→Y↙If E<1:Then “ZY=”:X◢:El se “ZH=”:X◢IfEnd↙“HY=”:Y◢“QZ=”:X+E+(L-K-E)÷2→Y◢X+L-K→Y:X+L→X↙If K<1::Then “YZ=”:X◢:Else “YH=”:Y◢IfEnd↙“HZ=”:X◢Prog“JDF2J-JSMS”↙2、JDF2J-JSMS(交点法2-计算模式) LbI 0↙“1 KD=>XY,2 XY=>KD”?Z↙If Z=1:Then Goto 1:IfEnd↙If Z=2:Then Goto 2:IfEnd↙LbI 1↙“JS K”?P:“BZ(m)”?D:“BJ(°)”?W↙Prog“JDF3JPZS”↙“X=”:X◢“Y=”:Y◢If Z=1: Then Goto 1:Goto 1:IfEnd↙LbI 2↙“X”?X:“Y”?Y:“BJ(°)”?W↙Prog“JDF4JPFS”↙“JS K”:P◢“BZ(m)=”:D◢If Z=2: Then Goto 2:Goto 2:IfEnd↙3、JDF3JPZS (交点法3平曲线正算) LbI 1↙F→J↙B-Z[3]cos(F)→X↙C-Z[3]sin(F)→Y↙E→G↙If P≤A-Z[3]:Then A-Z[3]-P→I:-I→M:0→N:F+W→H: Goto5:IfEnd↙(数字0)If P≤A-Z[3]+E:Then P-A+Z[3]→I:90I2÷(REπ)→H: O<0=>-H→H:(前面为字母0,后面为数字0)H+W+F→H: Goto 3: IfEnd↙If P≤A-Z[3]+L-K:Then P-A+Z[3]-E→I: Goto 4:Else Goto2: IfEnd↙LbI 2↙B+Z[4]cos(F+O)→X↙(字母0)C+Z[4]sin(F+O)→Y↙(字母0)F+O+180→J↙(字母0)K→G↙If P≤A-Z[3]+L:Then A-Z[3]+L-P→I:90I2÷(RKπ)→H: O>0=>-H→H:(前面为字母0,后面为数字0)H+J+W+180→H: Goto 3 :Else P-A+Z[3]-L→I:-I→M:0→N:(数字0)J+W+180→H: Goto 5:IfEnd↙LbI 3↙I-I^(5)÷(40(RG)2)→M↙I^(3)÷(6GR)-I^(7)÷(336(RG)^(3))→N↙G oto 5↙LbI 4↙(E+2I)×90÷(πR)→H↙Rsin(H)+Z[2]→M↙R(1-cos(H))+Z[1]→N↙O<0=>-H→H↙(前面为字母0,后面为数字0)J+H+W→H↙Goto 5↙LbI 5 ↙If P≤A-Z[3]+L-K:Then O<0(前面为字母0,后面为数字0)=>-N→N:Else O>0(前面为字母0,后面为数字0)=>-N→N: Goto 6: IfEnd↙LbI 6 ↙X+Mcos(J)-Nsin(J)+Dcos(H)→X↙Y+Msin(J)+Ncos(J)+Dsin(H)→Y↙4、JDF4JPFS(交点法4平曲线反算)X→U:Y→V:0→D:F-W→J↙(数字0)A+(Y-C)cos(J)-(X-B)sin(J)→P↙LbI 1↙Prog“JDF3JPZS”↙H-180→J↙(V-Y)cos(J)-(U-X)sin(J)→I↙If Abs(I)<10^(-4):Then Goto 2:Else P+I→P: Goto1: IfEnd↙LbI 2↙(V-Y)÷sin(H)→D↙程序简介本套程序共有1个主程序,3个子程序,适用于CASIO-5800用户。
5800交点法全线坐标计算程序

我自用的5800交点法全线坐标计算程序,适用于主线(等长完整缓和曲线)全线任意中边桩坐标计算。
特点是输入参数少,方便,一般设计图纸上都有。
一、主程序 ZB1、Lbl 02、”ZHANGHAO”?Z3、Prog ”SJ”(交点参数子程序)4、”BZ”?M5、I-D→Q: J-F→P6、tan-1(P÷Q)→A7、If Q<0:Then A+180→A:IfEnd8、If A<0:Then A+360→A:IfEnd9、H-I→Q:V-J→P10、tan-1(P÷Q)→B11、If Q<0:Then B+180→B:IfEnd12、If B<0:Then B+360→B:IfEnd13、A-B+180→E:1→U14、If E>360:Then E-360→E:IfEnd15、If E<0:Then 360+E→E:IfEnd16、If E<180:Then 180-E→○:IfEnd17、If E>180:Then E-180→○:-1→U:IfEnd18、L÷2-L3÷240÷R2→Q19、L2÷24÷R-L3÷2688÷R3→P20、(R+P)tan(○÷2)+Q→T21、R○∏÷180+L→G22、C-T→N23、Z-N→S24、If S>G:Then Z-N-G+T→S:I+ScosB→X: J+SsinB→Y: B→W:Else If S>G-L:Then G-S→S: S-S5÷40÷R2÷L2→E: S3÷6÷R÷L→K: I+TcosB+Ecos(B+1 80)+UKcos(90+B)→X: J+TsinB+Esin(180+B)+UKsin(90+B)→Y: B-180U S2÷2÷R÷L÷∏→W: Else If S>L:Then Rsin(180(2S-L)÷2÷R÷∏)+Q →E: R(1-cos(180(2S-L)÷2÷R÷∏))+P→K:I-TcosA+EcosA-UKsinA→X: J-TsinA+EsinA+UKcosA→Y: A+180U(S-L)÷R÷∏+180UL÷2÷∏÷R→W: Els e If S>0:Then S-S5÷40÷R2÷L2→E:S3÷6÷R÷L→K:I-TcosA+EcosA-UKsinA →X: J-TsinA+EsinA+UKcosA→Y:A+180US2÷2÷R÷L÷∏→W: Else If S<0:T hen I-(T-S)cosA→X: J-(T-S)sinA→Y: A→W: IfEnd: IfEnd: IfEnd: If End: IfEnd29、X+Mcos(90+W)→X:Y+Msin(90+W)→Y”X”:X◢”Y”:Y◢30、Goto 0二、数据库子程序:SJIf Z<本曲线HZ(或YZ)桩号:Then 本曲线前一交点X坐标→D:本曲线前一交点Y坐标→F:本曲线交点X坐标→I: 本曲线交点Y坐标→J:本曲线后一交点X 坐标→H:本曲线后一交点Y坐标→V:本曲线交点桩号→C:本曲线曲线半径→R:本曲线缓和曲线长度→L:Else If Z<二曲线HZ(或YZ)桩号:Then二曲线前一交点X坐标→D:二曲线前一交点Y坐标→F:二曲线交点X坐标→I:二曲线交点Y 坐标→J:二曲线后一交点X坐标→H:二曲线后一交点Y坐标→V:二曲线交点桩号→C:R=二曲线曲线半径:二曲线缓和曲线长度→L:Else If ………… IfEnd:说明:变量输入:Z=计算点桩号:M=计算桩号边桩距离(左负右正)。
卡西欧5800-交点法-任意里程坐标计算程序(对称型、不对称型、有无缓和曲线、单圆曲线型)
Fx-5800p单交点对称型、不对称型、有无缓和曲线单圆曲线型任意里程坐标计算本程序适用于单交点对称型、不对称型、有无缓和曲线单圆曲线型一个交点范围内(含交点前后有直线段时)的曲线要素核对和坐标计算,手工输入要素,对设计图纸的“直线、曲线转角表”中的交点数据进行复核验证,专为“线元法的中边桩坐标正反算程序”提供:起点坐标和起点切线方位角等数据!当然本程序也可单独逐交点输入进行放样计算用!本程序由一个主程序QXJS和三个子程序(QXJS1、QXJS2、QXJS3)构成,运行时只需运行主程序QXJS即可!主程序名:QXJS24→Dimz↙Cls :"K(JD)"?K :"X(JD)"?X :"Y(JD)"?Y :"LS1"?B :"LS2"?C : ?R :"FWJ(ZH)"?M : "α(Z-,Y+)"?O : M+O→N :Prog "QXJS1"↙Cls :"T1=":"T2=":"L=":"LY=": Locate 4,1,S : Locate4,2,T : Locate 4,3,L : Locate 4,4,Q◢Cls :"E=":"K(ZH)=": Locate 7,1,E : Locate 7,2,Z[1] ◢Cls : "K(HY)=":"K(QZ)=":"K(YH)=":"K(HZ)=": Locate 7,1, Z[2] : Locate 7,2, Z[3] : Locate 7,3, Z[4] : Locate 7,4, Z[5] ◢LbI 0 : "K×+×××"?P : "Z"?D : If D≠0 :Then "90°"?H : IfEnd : Prog "QXJS2"↙If D<0 :Then Cls : "X(L)=":"Y(L)=": Locate 6,1,F : Locate 6,2,G◢Goto 0 : IfEnd↙If D=0 :Then Cls : "X(Z)=":"Y(Z)=": Locate 6,1,F : Locate 6,2,G:"QXFWJ(Z)=": Z▶DMS◢Goto 0 : IfEnd↙If D>0 :Then Cls : "X(R)=":"Y(R)=": Locate 6,1,F : Locate 6,2,G◢Goto 0 : IfEnd↙子程序1名: QXJS1If O<0 :Then -1→W : Else 1→W : IfEnd : WO→A ↙B² ÷24÷R-B^(4)÷2688÷R ^(3) →Z[6] ↙C² ÷24÷R-C^(4)÷2688÷R ^(3) →Z[7] ↙B÷2-B^(3)÷240÷R² →Z[8] ↙C÷2-C^(3)÷240÷R² →Z[9] ↙Z[8]+((R+Z[7]-(R+Z[6])cos(A))÷sin(A))→S↙Z[9]+((R+Z[6]-(R+Z[7])cos(A))÷sin(A))→T↙RAπ÷180+(B+C) ÷2→L↙RAπ÷180-(B+C) ÷2→Q↙(R+(Z[6]+Z[7])÷2)÷cos(A÷2)-R→E↙K-S→Z[1] ↙Z[1]+B→Z[2] ↙Z[2]+Q÷2→Z[3]↙Z[1]+L-C→Z[4]↙Z[4]+C→Z[5]↙子程序2名: QXJS2X-Scos(M)→Z[19]:Y-Ssin(M)→Z[20]↙X+Tcos(N)→Z[21]:Y+Tsin(N)→Z[22]↙If P>Z[1]:Then Goto 1 :IfEnd↙Z[1]-P→L↙X-(S+L)cos(M)+Dcos(Z+H)→F↙Y-(S+L)sin(M)+Dsin(Z+H)→G↙M→Z : Goto 5↙LbI 1 : If P>Z[2]:Then Goto 2 :IfEnd↙P-Z[1]→L:L→Z[12]:B→Z[13]:Prog"QXJS3"↙Z[19]+Z[14]cos(M)-WZ[15]sin(M)+Dcos(Z+H)→F↙Z[20]+Z[14]sin(M)+WZ[15]cos(M)+Dsin(Z+H)→G↙M+90WL² ÷(BRπ)→Z↙Goto 5↙LbI 2 : If P>Z[4]:Then Goto 3 :IfEnd↙P-Z[1]→L:90(2L-B)÷R÷π→Z[11]↙Rsin(Z[11])+Z[8]→Z[14]:R(1-cos(Z[11]))+Z[6]→Z[15]↙ Z[19]+Z[14]cos(M)-WZ[15]sin(M)+Dcos(Z+H)→F↙Z[20]+Z[14]sin(M)+WZ[15]cos(M)+Dsin(Z+H)→G↙M+WZ[11]→Z↙Goto 5↙LbI 3 : If P>Z[5]:Then Goto 4 :IfEnd↙Z[5]-P→L:L→Z[12]:C→Z[13]:Prog"QXJS3"↙Z[21]-Z[14]cos(N)-WZ[15]sin(N)+Dcos(Z+H)→F↙Z[22]-Z[14]sin(N)+WZ[15]cos(N)+Dsin(Z+H)→G↙N-90WL² ÷(CRπ)→Z↙Goto 5↙LbI 4 : P-Z[5]→L↙X+(T+L)cos(N)+Dcos(Z+H)→F↙Y+(T+L)sin(N)+Dsin(Z+H)→G↙N→Z↙Goto 5↙LbI 5 : 360Frac((Z+360)÷360)→Z↙子程序3名: QXJS3If Z[12]=0 :Then 0→Z[14]: 0→Z[15]:Else↙Z[12]- Z[12]^(5)÷40÷(RZ[13])²+ Z[12]^(9)÷3456÷(RZ[13])^(4)→Z[14]↙Z[12]^(3)÷6÷(RZ[13])-Z[12]^(7)÷336÷(RZ[13])^(3)+Z[12]^(11) ÷42240÷(RZ[13])^(5)→Z[15] ↙IfEnd↙程序说明:已知数据输入:K(JD)? 交点桩号X(JD)? 交点X坐标Y(JD)? 交点Y坐标LS1 ? 第一缓和曲线长度LS2 ? 第二缓和曲线长度R ? 圆曲线半径FWJ(ZH)? 交点前(即前交点至本交点也即ZH点)的正切线方位角α(Z-,Y+)? 本交点处线路转角(左转为负,右转为正,度分秒输入)K×+×××? 待求桩号Z ? 待求桩号距中距离(左负值,右正值,中为0)90°? 斜交右角(线路切线前进方向与边桩右侧夹角)垂直中桩即输90计算结果显示:T1= 第一切线长T2= 第二切线长L= 曲线总长LY= 圆曲线长E= 曲线外距K(ZH)=直缓点桩号K(HY)=缓圆点桩号K(QZ)=曲中点桩号K(YH)=圆缓点桩号K(HZ)=缓直点桩号X= ;Y= 待求点的坐标(L-左,Z-中,R-右)QXFWJ(Z)=待求点的中桩切线方位角(在求中桩坐标时显示)。
(整理)公路工程坐标正反算原理及5800计算器程序.

目录一、坐标正算基本公式 (02)二、坐标反算原理 (04)三、高程数据库录入变换 (05)四、计算器程序 (07)01、ZBZS(坐标正算) (07)02、ZBFS(坐标反算) (08)03、GCJF(高程积分) (09)04、PJFY(坡脚放样) (10)05、JFCX(积分程序) (11)06、ZBFY(坐标放样) (11)07、DT(递推) (12)08、HP(横坡) (13)09、LK(路宽) (14)10、SJK1(平面数据库) (14)11、SJK2(纵面数据库) (14)12、SJK3(左路宽度数据库) (15)13、SJK4(右路宽度数据库) (15)14、SJK5(横坡数据库) (16)15、SJK6(下边坡数据库) (16)16、SJK7(左上边坡数据库) (17)17、SJK8(右上边坡数据库) (18)五、后记 (19)CASIO 5800计算器公路工程测量程序一、正算所涉及的计算公式 X图表 1在图1中,A 点为回旋曲线起点,B 点为回旋曲线止点,I 点为所求坐标点。
设:A 点的X 坐标为X A ,Y 坐标为Y A ,A 点的切线方位角为α,A 点的曲率为ρA ,A 点的里程为L A ,B 点的曲率为ρB ,B 点的里程为L B ,I 点的曲率为ρI ,I 点的里程为L I 。
I 点的切线角为β。
由于回旋线上各点曲率半径R i 和该点至曲线起点的距离L 成反比。
故此任意点的曲率为;CL R i i ==1ρ (c 为常数) (1) 由式(1)可知,回旋曲线任意点的曲率按线性变化,由此回旋曲线上里程为L i 点的曲率为;AB A i A B A i L L L L --⨯-+=)(ρρρρ (2) 当曲线右偏时ρB 、ρA 取正值,反之取负值。
设:A B AB L L M --=ρρ ------ 曲率变化率 (3)A i L L L -= ------ I 点至起点A 的距离 (4)则有:ML A i +=ρρ (5)在I 点处取一微段,则有:l i il d R d d ρβ== (单位为弧度) (6) 对上式进行积分并代入式(3)(4),则有;⎰⎰⎰⎰+=+=+==l l l lA l l A l A l i i ML L Ld M d d ML d 000022)(ρρρρβ (7) 因已知回旋曲线起点A 的切线方位角α,则里程为L i 点的切线方位角为:i i βαα+= (8)将式(7)代入式(8)得:22ML L A i ++=ραα(单位为弧度) (9) 对于式(9),当ρA =0,M=0时,则αi =α,式(9)变成计算直线段上任意点切线方位角的计算公式;当ρA =c (c 为常数),M=0时,则αi =α+ρA L ,式(9)变成计算圆曲线上任意点切线方位角的计算公式。
5800计算器交点法正算程序
Lbi3:”Xp=”:N+Z[3]Cos(F-180)+DCos(C)→X▲
”Yp=”:E+Z[3]Sin(F-180)+DSin(C)→Y▲
Lbi4:”PJ=”? S
IfS=0:thenGoto O: ifend
”BX=”:X+SCos(H+90)→Z[20]▲
”BY=”:Y+SSin (H+90)→Z[21]▲
Goto 4
0.5Q-Q3÷(240R2)→Z[2]:计算第二缓和曲线增量
180÷Rπ→Z:
Z[1]+(R+ Q2÷(24R)- Q4÷(2688R3)-(R+ L2÷(24R)- L4÷(2688R3)).Cos(Abs(A)))÷Sin(Abs(A))→Z[3]计算第一切线长
Z[2]+(R+ L2÷(24R)- L4÷(2688R3)-(R+ Q2÷(24R)- Q4÷(2688R3)).Cos(Abs(A)))÷Sin(Abs(A))→Z[4]计算第二切线长
√(K2+I2)→D:
F+Ptan-1(K÷I)→C:
F+A-PZQG2÷2Q2→H:
Goto 3
Lbi6:T-M→D: (改动)
F+180→C:F→H:
Goto 8
Lbi7:Z[4]+M-Z[11]→D:F+A→C:C→H
Lbi8:”XP=”:N+DCos(C)→X▲
”XP=”:E+DSin(C)→Y▲
F+PZG2÷6L→C:计算切线方位角
F+PZLG2÷2L2→H:Goto 3
卡西欧5800交点法坐标计算程序

交点法坐标计算JDFZBJS第一种:单一交点法计算任意里程位的坐标。
程序如下:待求段的交点X坐标→V:待求段的交点Y坐标→W:前一段的交点X坐标→M:前一段的交点Y坐标→N:直缓点ZH的里程→Q:缓直点HZ的里程→Z:待求段圆曲线半径→R:待求段缓和曲线长度→U:待求段的切线长度→T:待求段转向方向(左转取-1,右转取+1)→P:待求段转向偏角→A:10→DimZ:Cls:“KM=”?L: 待求点里程“L-1,R+1”?K: 待求点位于前进方向左侧为-1,右侧为+1“PJ=”?S: 待求点到线路设计中心的平距Lbl 0:Pol(V-M,W-N):J→Z[1]:Rec(T,Z[1]+180):V+I→Z[2]:W+J→Z[3]:Lbl 1:If L≤Q:Then Rec(Q-L,Z[1]+180):Else Goto 2:IfEnd:Z[2]+I→Z[4]:Z[3]+J→Z[5]:If K=1:Then Rec(S,Z[1]+90):Else Rec(S,Z[1]+270):IfEnd:Goto 6:Lbl 2:Abs(Q-L)→Z[6]:If U≥Z[6]:Then Pol(Z[6]-Z[6]ˆ(5)÷(40R2U2)+Z[6]^(9)÷(3456(RU)^(4)),Z[6]^(3)÷(6RU)-Z[6]^(7)÷(336(RU)^(3))+Z[6]^(11)÷(42240(RU)^(5))):Else Goto 3:IfEnd:J→Z[7]:Rec(I,Z[1]+Z[7]P):Z[2]+I→Z[4]:Z[3]+J→Z[5]:Z[1]+Z[7]P+60PZ[6]2÷(RUπ)+90→Z[10]:If K=1:Then Rec(S,Z[10]):Else Rec(S,Z[10]+180):IfEnd:Goto 6:Lbl 3:Abs(Q-L)→Z[6]:If L≤Z-U:Then Pol(Rsin(90(2Z[6]-U)÷(Rπ))+U-Rsin(90U÷(Rπ))-U^(3)÷(40R2),R-Rcos(90(2Z[6]-U)÷(Rπ))+U2÷(24R)):Else Goto 4:IfEnd:J→Z[7]:Rec(I,Z[1]+Z[7]P):Z[2]+I→Z[4]:Z[3]+J→Z[5]:Z[1]+90P(2Z[6]-U)÷(Rπ)+90→Z[10]:If K=1:Then Rec(S,Z[10]):Else Rec(S,Z[10]+180):IfEnd:Goto 6:Lbl 4:If L≥Z-U And L≤Z:Then Z[1]+AP→Z[1]:Else Goto 5:IfEnd:Rec(T,Z[1]):V+I→Z[2]:W+J→Z[3]:Z→Q:-P→P:-K→K:Z[1]+180→Z[1]:Goto 2:Lbl 5:If L≥Z:Then Z[1]+AP→Z[1]:IfEnd:Rec(T,Z[1]):V+I→Z[2]:W+J→Z[3]:Rec(L-Z,Z[1]):Z[2]+I→Z[4]:Z[3]+J→Z[5]:If K=1:Then Rec(S,Z[1]+90):Else Rec(S,Z[1]+270):IfEnd:Goto 6:Lbi 6:Z[4]+I→Z[8]:Z[5]+J→Z[9]:Cls:Fix 3:“Xp=”: 计算的X坐标“Yp=”: 计算的Y坐标Locate 7,1,Z[8]: X坐标显示在第一行Locate 7,2,Z[9]◢Y坐标显示在第二行Stop注解:在本程序中考虑了ZH点前和HZ点后的直线情况。