基于simulink农用车辆abs滑移率控制分析
基于Simulink的汽车ABS建模与仿真

车辆运动方程: 车轮运动方程: 车辆纵向摩擦力:
(1) (2) (3)
3.2 汽车轮胎模型 汽车轮胎模型反映了车轮和地面附着系数 与滑移率之间的关系。常用的轮胎模型有双线 性模型、魔术公式模型等。但由于试验条件的 限制,本文采用双线性模型,把附着系数—滑 移率曲线简化为两段直线。 其计算公式为:
(4)
基 于 Simulink 的 汽 车 ABS
建模与仿真
长春科技学院 - 付建国 \ 王洪亮 \ 钟明利 \ 刘小芳
摘要: 本文阐述了在 Simulink 的环境下以 ABS( 防抱死制动系统 ) 滑移率为对象进行控制,根据 ABS 系统工作原理建立了 ABS 单一车轮的仿真 模型,并得出仿真曲线,验证汽车 ABS 具有良好的制动性能。
3.3 汽车制动器模型 汽车制动器模型指制动器力矩与制动系气 液压力之间的关系模型。汽车制动时首先要克 服制动器及制动缸中的弹簧回位力,设此力为 Pm,则相应的制动力矩可用如下公式表示 :
为了方便研究控制算法,本文在进行仿真
时假设制动器为理想元件,忽略了由滞后性带
来的影响。因此,制动器方程为:
4. 汽车 ABS 的 Simulink 模型
以附着系数为输入,以车身速度和制动距离为
输出。最后将车轮线速度、车身速度和制动距
离输入到滑移率计算模块,计算获得实际滑移
率。本仿真模型还设置了示波器,以便观察仿
真曲线,并进行相关分析。
本文所采用的汽车参数模型如表 1 所示。
表 1 单轮模型车辆参数
名称与符号
数值
汽车整备质量 M/kg 1500
制动初速度 v/(m/s) 120
采用 Matlab/ Simulink 图形化建模工具建
基于Simulink 防抱死制动系统 (ABS) 系统仿真
THANKS
模型子系统、液压制动模型子系统、电机制动模型子系统。基于PID控制的ABS电动汽车单轮模型制动系统模
块的关系如图片所示
3
Simulink模型
2014
2015
2016
2017
车轮速度子系统
为了控制制动压力的变化率,该模型从期望的滑动量中减去实际滑动量,并将此信号 馈入 bang-bang 控制(+1 或 -1,具体取决于误差的符号,请参见上图 )。此开/关速 率通过一阶时滞,该时滞表示与制动系统的液压管路相关联的延迟,为施加到车轮上 的制动扭矩。
2
ABS防抱死系统原理
2 ABS的工作原理
ABS单轮模型
3
Simulink模型
3 simulink模型
添加项目
添加项目
单击编辑此项目的详 细内容
添加项目
添项目ห้องสมุดไป่ตู้
添加项目
单击编辑此项目的详
单击编辑此项目的详
细➢内在容理论分析的基础上,利用simulink对汽车防抱制动系统的各个子系统进行图形仿真建模,主要细包内括容单轮车辆
基于simulink模型 的车辆ABS系统
滑移率控制
CONTENTS
1 问题分析 2 ABS防抱死系统原理 3 simulink模型 4 仿真分析 5 结论
1
问题分析
1 问题分析
现状
在车辆紧急制动时,驾驶员踏板往往踩死, 这种情 况下,如果车轮抱死,车 轮与路面间 的侧向附着力将完全消失:如果只是前轮 转向 轮)先于后轮抱死, 汽车将失去转向能力;如 果只是后轮先于前轮抱死,汽车将产生侧滑( 甩尾)现象。ABS是提高汽车安全性能的主要 因素之一,对于 具有较高非线性的汽车制 动 过程,很难建立精确的数学模型。本文以轿 车为研究 对象,建立了ABS数 学模型,采用 Simulink仿真软件对ABS进行仿真。单击编辑副标题
ABS的simulink仿真分析详细步骤
基于Matlab/Simulink 的汽车ABS 建模与仿真一、汽车制动时滑移率与附着系数的关系汽车制动时,随着制动强度的不断增加,车轮滚动的成分会越来越少,同时车轮滑动的成分将越来越多。
一般用滑移率λ来说明制动过程中滑动成分的多少。
滑移率的定义是:100%v r vωλ-=⨯式中,v 为车轮中心的速度;r 为车轮的滚动半径;ω为车轮的角速度。
在纯滚动时,车速v=ωr ,滑移率λ=0;在纯滑动时,车轮的角速度ω=0,滑移率λ=100%;在车轮边滑边滚时,0<λ<l00%。
所以,滑移率的大小反映了车轮运动过程中滑动成分所占得比例。
滑移率越大,则车轮运动过程中滑动的成分越多。
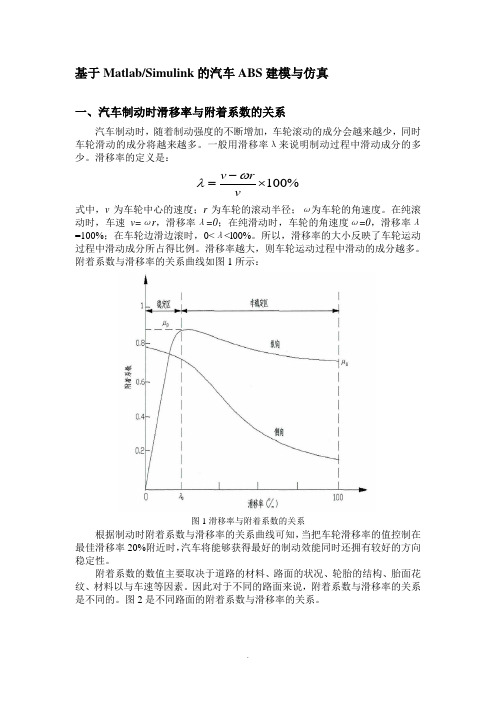
附着系数与滑移率的关系曲线如图1所示:图1滑移率与附着系数的关系根据制动时附着系数与滑移率的关系曲线可知,当把车轮滑移率的值控制在最佳滑移率20%附近时,汽车将能够获得最好的制动效能同时还拥有较好的方向稳定性。
附着系数的数值主要取决于道路的材料、路面的状况、轮胎的结构、胎面花纹、材料以与车速等因素。
因此对于不同的路面来说,附着系数与滑移率的关系是不同的。
图2是不同路面的附着系数与滑移率的关系。
图2 不同路面的附着系数与滑移率的关系路面峰值附着系数滑动附着系数沥青或混凝土(干)0.75沥青(湿)0.5—0.7 0.45—0.6混凝土(湿)0.8 0.7砾石0.6 0.55土路(干)0.68 0.65土路(湿)0.55 0.4—0.5雪(压紧)0.2 0.15冰0.1 0.07表1 各种路面上的平均附着系数二、汽车ABS原理汽车ABS作为一种主动安全装置,它可以通过调节车轮制动压力将汽车前后车轮的滑移率控制在最佳滑移率附近,使汽车在获得最大地面制动力的同时拥有良好的方向稳定性。
1、汽车ABS的控制原理在常见的ABS 系统中,每个车轮上各安装一个转速传感器,将有关各车轮转速的信号输入电子控制装置ECU)。
电子控制装置ECU)根据各车轮转速传感器输入的信号对各个车轮的运动状态进行监测和判定,并形成相应的控制指令。
基于Simulink的汽车ABS建模与仿真
基于Simulink 的汽车ABS 建模与仿真汽车防抱死制动系统(ABS)是一种很关键的汽车主动安全技术。
本文采用基于有限状态机的系统仿真方法,采用Simulink 建模,对ABS 模型中的连续系统和离散系统进行仿真。
仿真结果表明,该仿真系统能比较真实地反映汽车ABS 系统的实际工作过程,显著缩短制动距离,提高安全性。
通过对ABS 建立理论模型并进行计算机仿真,可以初步确定ABS 的一些参数,还可以通过仿真结果来验证和分析控制逻辑。
因此,对ABS 的仿真分析可以有效缩短开发周期,减少开发成本,并通过少量的试验验证,可作为实际ABS 性能分析及控制逻辑的模型。
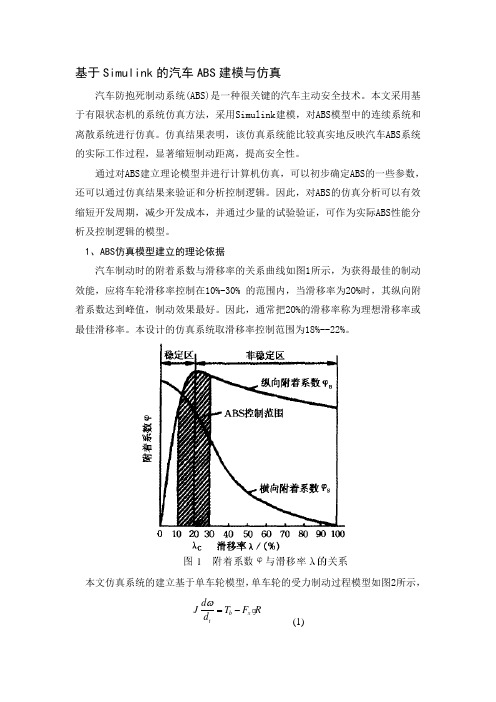
1、ABS 仿真模型建立的理论依据汽车制动时的附着系数与滑移率的关系曲线如图1所示,为获得最佳的制动效能,应将车轮滑移率控制在10%-30% 的范围内,当滑移率为2O%时,其纵向附着系数达到峰值,制动效果最好。
因此,通常把2O%的滑移率称为理想滑移率或最佳滑移率。
本设计的仿真系统取滑移率控制范围为18%--22%。
本文仿真系统的建立基于单车轮模型,单车轮的受力制动过程模型如图2所示,b x t d J T F R d ω=- (1)x dv M F dt = (2)通常车轮制动扭矩与轮缸压力成正比,即:b T K P =⨯ (3)t x d J K P d F R ω-⨯+⨯= (4)因此 可得车轮滑移率: V V V ωλ-=(5)式中M--车轮承受的质量;V--车身速度;V ω--车轮速度;x F —地面制动力;J —车轮转动惯量;ω--车轮角速度;R--车轮滚动半径;b T --制动器扭矩;K--制动力矩系数;P--轮缸压力; λ—滑移率。
本仿真系统采用的汽车模型参数如表1所示:表一 汽车模型参数2、ABS仿真模型的建立及参数设置ABS系统仿真模型如图3所示:图3 ABS系统仿真模型3、ABS系统仿真结果对初速度为25Km/h的汽车ABS系统进行计算机仿真,仿真结果如图4和图5所示。
基于CarSim与Simulink车辆防抱死系统仿真分析
实 际 滑 移 率 处 于 最 佳 滑 移 率 附 近 '使 汽 车 在 最佳滑移率所对应的地面制动力下进行制动。
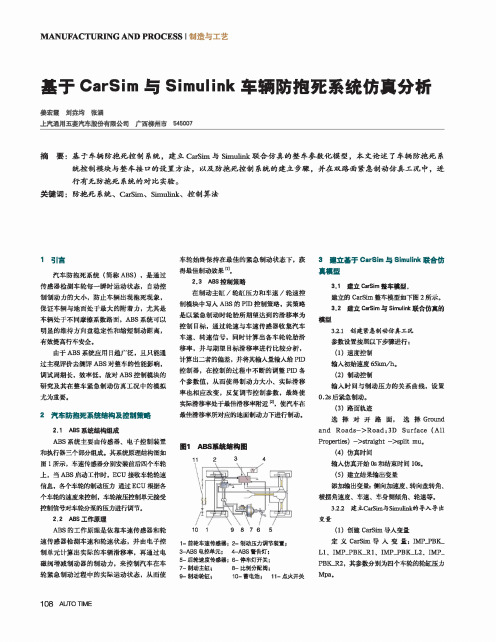
图1 ABS系统结构图
11
2
3
4
1 - 前轮车速传感器i 2 - 制动压力调节装置;
3-A B S 电控单元: 4-A B S 警告灯;
3 . 3 运 行 CarSim与 Simulink联合仿真模型
在制动主缸及轮缸压力控制模块和车速
及轮速控制模块中对ABS控制策略进行修改
并 运 行 ,如 图 3 所 示 。
4 仿真结果分析
在针对车辆防抱死制动系统测试的双路
面紧急制动测试工况下,对 于 有 无 A B S控制
车 轮 始 终 保 持 在 最 佳 的 紧 急 制 动 状 态 下 ,获
得最 佳 制 动 效 果 [1]。
2.3 ABS控制策略
在制动主缸/ 轮缸压力和车速/ 轮速控
制 模 块 中 写 入 A B S 的 P ID 控制 策 略 ,其策略
是以紧急制动时轮胎所期望达到的滑移率为
控 制 目 标 ,通 过 轮 速 与 车 速 传 感 器 收 集 汽 车
明显的维持方向盘稳定性和缩短制动距离,
有效提髙行车安全。
由 于 A B S 系统应用日趋广泛,且只能通 过主观评价去测评ABS对整车的性能影响, 调 试 周 期 长 ,效 率 低 ,故 对 A B S 控制模块的
研究及其在整车紧急制动仿真工况中的模拟
尤为重要。
2 汽车防抱死系统结构及控制策略
2.1 ABS系统结构组成 A B S 系 统 主 要 由 传 感 器 、 电子控制装置
基于Carsim的汽车ABS整车控制研究
united simulation model,the
joint simulation model
is finally analyzed
on
different road situations to obtain the simulation curves.Therefore,the rationality of PID controller iS verified. Key words:PID controller;united simulation
on
the slipping ratio of wheels is conducted.Next,the deviation between the actual and expected
slip ratios iS inputted into PID controller.Thereafter,the automobile iS braked with the best power and slipping ratio.By constructing
137
文献标志码:A
文章编号:1672—5581(2016)06—0481~06
Carsim—based study
on
automobile ABS control
HA0 Liang,LI Gang,LfU Shu-wei
(Automobile&Traffic Engineering College,Liaoning University of
图1滑移率计算模型fig1caculatingmodelofthesliprate图2pid控制器模型fig2pidcontrollermodel如图2所示pid控制器以制动时轮胎的期望滑移率为控制目标通过轮速与车速传感器采集汽车速度车轮转速信号8根据实际采集的速度信号计算出汽车各轮胎实际滑移率再将实际滑移率与期望滑移率进行比较得出二者的偏差将其作为pid控制器的输入量控制器输出其制动力的大小在控制的过程中要不断地调整pid控制的各参数从而调节制动力的大小轮胎受制动器不同制动力作用后实际滑移率会发生相应的变化通过反馈后与期望滑移率的偏差也发生了相应的变化反复调节控制器的控制参数最终使实际滑移率始终处于最佳滑移率附近汽车在最佳滑移率所对应的地面制动力下进行制动制动效果达到最佳
基于滑移率的车辆abs的控制算法设计及仿真分析_吴西

126
ABS, 可以实现连续控制, 从而提高 ABS 在制动过程中 的平顺性, 并获得最佳的、 稳定的制动效果。 本文以车 轮 滑 移 率 为 控 制 目 标 , 分 别 采 用 bang-bang 控 制 、 PID 控制和模糊控制方法对 ABS 进行控制, 采用 Simulink 对 以上三种控制方法进行了仿真建模和分析对比。
制的制动时间和制动距离相差不大但模糊控制的制动pidfuzzv一一制动时间s276142118115制动距离m3062144210461037控制pid控制和模糊控制方法对abs进行控制并使用mulink对以上三种控制方法进行了仿真建模和分各控制方法下的轮速车速曲线糊控制效果最好pid控制次之bangb滑移率是衡量制动稳定性的主要因素仿真结果如图所示制动后无abs时滑移率很小车轮趋参考文献
1 s Sd Stopping distance
you1
4
out3
1 s Ww Wheel Speed
Scope2 3
out2
518.7
Scope1
Display
图 2 模糊控制仿真系统框图
表 2 车辆及控制器参数
变量名称 车轮半径 整车装备质量 制动迟滞时间 车轮转动惯量 比例系数
符号 R m TB m Kf
为 0.2, 则滑移率的误差 e 的变化范围为 [-0.2, 0.8], 将
基于simulink的汽车防抱死制动系统的仿真研究

基于simulink的汽车防抱死制动系统的仿真研究李少廷;徐家川【摘要】在 simulink环境下对汽车防抱死制动系统进行数学建模,采用基于车轮加、减速度门限值及参考滑移率的控制策略,控制器以车轮的角加、减速度和滑移率的大小为输入,根据输入值的大小控制器输出相应的信号给制动模型,进而对轮速和滑移率进行调节,使其在理想范围内。
对汽车ABS模型进行仿真研究,通过得出的仿真曲线,验证了 ABS 制动系统拥有良好的制动性和操纵性。
%Mathematical modeling to the automotive anti-look braking system was built based on simulink.It adopted the wheel add,substract speed threshold method and referenced slip ratio control strategy.The size of the wheel angular velocity and slip ratio study were input into the controler,the corresponding signal was output to the model of the brake based on the size of the input value to adj ust the wheel speed and slip ratio.Simulation was carried out on the automobile ABS model and simulation curve was obtained.The results confirmed that the ABS braking sys-tem has good brake and maneuverability.【期刊名称】《山东理工大学学报(自然科学版)》【年(卷),期】2016(030)005【总页数】5页(P44-48)【关键词】防抱死制动系统;门限值;仿真【作者】李少廷;徐家川【作者单位】山东理工大学交通与车辆工程学院,山东淄博 255049;山东理工大学交通与车辆工程学院,山东淄博 255049【正文语种】中文【中图分类】U463.51汽车防抱死制动系统简称ABS,是一种主动安全控制装置.随着汽车车速不断提高,汽车的安全性能越来越受重视[1],作为汽车安全性能的重要组成部分,汽车制动性能的好坏直接关系到驾驶员和乘客的人身安全,因而提高汽车的制动效能一直是汽车研究的重要课题.汽车在制动时,如果汽车的前轮先抱死,驾驶员就无法控制车轮的行驶方向,容易出现撞车的危险.倘若汽车的后轮先抱死,则会出现侧滑、甩尾,甚至出现汽车“掉头”的严重事故[2].ABS能够防止前后车轮制动时被完全抱死,从而提高了汽车在制动过程中的稳定性和操纵性,缩短制动距离,防止轮胎过度磨损.本文在现有基础上对ABS逻辑门限值的控制策略进一步研究,通过matlab/simulink对汽车ABS进行建模仿真,以期设计出制动效果较好的ABS制动控制系统.汽车防抱死系统一般由车轮速度传感器、电子控制单元和液压控制单元(液压调节器)组成[3].图1为典型的防抱死制动系统的组成示意图.汽车ABS的控制目的就是让汽车获得最大地面制动力,同时还要保证汽车拥有良好的方向稳定性以及避免发生侧滑现象[2-4],这一控制目标通过不断调节制动压力实现.本文采用目前比较成熟的汽车ABS控制系统,基于车轮加、减速度门限值和参考滑移率的控制策略,通过控制车轮的减速度和滑移率达到最佳的方向稳定性和制动效能,保证最短的制动距离.汽车防抱死制动系统的数学模型主要包括:车辆动力学模型、轮胎模型、制动模型和控制模型.制动系统模型主要研究车轮与地面之间的关系,在研究中侧重于ABS的应用效果,因此可忽略载荷转移、空气阻力、轮胎滚动阻力和悬架系统、转向系统,采用简化的单轮模型代表车辆来研究其制动过程[5].轮胎的受力分析图如图2所示.本文以单轮车辆模型为研究对象,对系统直接运用牛顿定律,可得到单轮的车辆纵向运动方程轮胎模型是车辆行驶过程中轮胎附着力和其他各种参数之间的函数关系式,通常用路面附着系数与各种参数之间的函数关系式[4,6-7]表示,附着系数和滑移率之间存在非线性关系,这种非线性关系可以采用如下“魔术公式”来拟合:本文采用逻辑门限的控制方法,在simulink中,stateflow是有限状态机的图形现实工具,可以解决复杂的监控逻辑问题.用户可以用图形化的工具来实现各个状态之间的转换,可以在simulink中直接嵌入stateflow,达到两者的无缝对接.在stateflow 中,状态和状态转换是最基本元素,有限状态机的示意图如图4所示.由于本文采用了基于车轮加、减速度的门限值和参考滑移率的控制策略,因此在采用逻辑门限控制方法的ABS系统控制策略中,预选条件为判断车轮是否有抱死倾向的标准,而复选条件为判断车轮抱死是否有避免的倾向.当满足预选条件时,车轮有抱死倾向,应降低制动压力,以增加车轮转速.当满足复选条件时,车轮避免了抱死倾向,制动压力应再次升高.所以不同的预选条件和复选条件组合会产生不同的控制逻辑,由此可以看出,门限值的选选择图3中的中附路面进行防抱死制动系统仿真,制动初速度v=30m/s,车轮的转动惯量Iw=2.3kg·m2,车轮半径R=0.33m,1/4车身质量300kg,A=0.4,B=1.2,C=7,D=5,防抱死制动系统仿真图如图6所示.基于simulink的ABS制动控制仿真模型的制动过程就是将车轮的角加速度和滑移率作为参考对象输入到控制系统,控制系统根据stateflow模块绘制的状态和迁移条件输出控制信号到制动器,从而调节车轮的制动压力,使其角加速度和滑移率在控制范围内.仿真结果如图7~图11所示.由图7可知,装有ABS的车辆在制动过程中车轮始终没有抱死,一直保持一定的速度,能够保证汽车在制动过程中有较好的操纵性和稳定性.由图8可知,在装有ABS的车辆制动过程中,车轮的角加速度达到控制器的控制阀值时,控制系统发出指令,通过液压控制单元(电磁阀)的开启和关闭,控制制动压力,从而把车轮的角加速度控制在-62~62m/s2.由图9我们可以清楚地看到,在制动过程中,装有ABS制动系统的汽车比没有ABS 的汽车制动距离小,其中装有ABS的制动距离为180m左右,制动时间为12s,没有安装ABS的制动距离为220m左右,制动时间为14s.由图10可知,无ABS的车辆随着制动踏板踏到底,车轮的滑移率会迅速变为100%,而有ABS的车辆在制动的前8s,滑移率一直控制在0.2~0.4,根据图3中的曲线可以看出,车轮滑移率在0.2~0.4时可以获得最大的附着系数.由图11可知,无ABS的车辆在制动踏板踩到底后,车轮轮速迅速变为0,即车轮抱死,车轮抱死会严重影响车辆行驶的安全性,而装有ABS的车辆在制动时车轮不会抱死,保证了车辆的制动稳定性,增强了车辆的行驶安全性.由仿真结果可以看出,采用基于车轮角加速度门限和参考滑移率的控制策略的ABS制动控制系统,在制动过程中,汽车车轮没有出现抱死现象,表。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
农作物秸秆沼气池出料及其机械的研发吕建强1,张满1,王连2,赵广义3,胡玉窄(1.淮阴工学院机械工程学院,江苏淮安223003;2.淮安市苏通市政机械有限公司,江苏淮安22300;3.淮安市滨湖机械有限公司,江苏淮安223000;4.淮安天工传动科技有限公司,江苏淮安223005)摘要:秸秆的沼气化处理为闲置秸秆资源提供了一条最佳的利用途径,但秸秆沼气池使用中需要进行定期换料和清池大换料,以保持沼气池的产气效率。
由于秸秆沼渣中含有大量的纤维质沼渣,如使用禽畜粪便类沼气池用抽吸式沼液沼渣出料车进行出料,工作中容易出现堵塞现象,难以适应秸秆沼气池的出换料工作需要,此问题正成为秸秆沼气推广使用的瓶颈。
为此,介绍了一种抓取式秸秆出料车,解决了农村户用秸秆沼气池的出料问题。
关键词:农作物秸杆;沼渣;沼气池;出料中图分类号:S216.4;s233.9文献标识码:A文章编号:1003—188×(2012)04—0210-030引言秸秆是发展现代农业的重要资源,农作物光合作用的产物大约50%在籽实中,50%在秸秆里,秸秆含有丰富的有机质、氮磷钾和微量元素,能够成为农业生产的重要有机肥源。
我国拥有l亿hm2多耕地,南北地理气候从热带到寒带地域分布辽阔,农作物主要为多熟生产方式(两年三熟、双熟和三熟)。
农作物秸秆数量大、种类多、分布广,每年农业生产产生8.2亿t秸秆,可收集量为6.87亿t。
其中,主要为稻草、玉米秸秆、麦草,其次为甘薯蔓、油菜秸、大豆秸、甘蔗梢、高粱秸、花生秧及壳等。
大约2.15亿t秸秆被焚烧…,这是一笔可观的自然资源,在秸秆的利用中要考虑将氮磷钾和生物质微量元素还于农业土地。
这些是无法用人工化肥达到的,对防止农业土地的贫脊化具有重要意义。
秸秆处理也是摆在世界各国政府面前的一个重大难题。
我国现秸秆的综合利用水平不高,农民参与秸秆利用的积极性不高,农村大量的秸秆积压闲置,并且出现大量焚烧秸秆现象,不仅对环境造成严重污染,而且也对资源造成了巨大的浪费。
秸秆沼气处理是解决秸秆问题的最佳途径之一。
沼气可充分利用农作物中的固碳供农村日用,秸秆沼气发酵比直接燃烧能量利用效率提高o.2~0.9倍,沼渣是一种天然收稿日期:2011一06一06基金项目:江苏省苏北科技发展计划项目资助(B c2010434)作者简介:吕建强(1966一),男,江苏淮安人.高级工程师,(E—m ai l) l晒i卸qi n91@yal l∞.com.cno无公害有机肥料,且秸秆沼渣保留的氮、磷、钾等生物养分比常温堆肥的保留量要高,基本接近于高温堆肥的保留量旧J。
农作物秸秆沼气发酵与秸秆其它利用方式相比较,在改善农业生态系统内部物质循环方面有着无可比拟的优越性。
但秸秆沼气生产中产生的纤维质沼渣出渣更困难,这已成为秸杆沼气池推广应用的瓶颈问题。
到2008年底,全国农村地区已累计推广户用秸秆沼气13.8万户,秸秆沼气集中供气工程150处,2009年在全国示范建设了16处大型秸秆沼气集中供气工程。
秸秆沼气池出换料问题急需解决。
1秸秆沼气池沼渣特点及出料中存在的问题秸秆沼化处理后,一些难以分解的物质会变成沼渣残留在沼气池内。
沼渣的增加会使沼气池有效容积减少,影响产气量,所以沼气池使用中需要定期进行序批换料(每次出料30%)或大清池换料旧J,以保证沼气池的产气效率,满足沼气的实际使用要求。
秸秆中主要成分为纤维素、半纤维素、木质素H J,沼化发酵过程中难以彻底分解,会有大量的残留,虽然可使用预切断粉碎工艺,但秸秆发酵后残留的沼渣中短的纤维仍会聚积缠绕结块,且这一工艺增加了工序和秸秆沼气的成本,使秸秆粉碎中产生大量粉尘,不受农户的欢迎。
畜禽粪便沼气池所用的抽吸式出料车的结构及工作原理一。
不适用于秸秆沼渣的出料。
出料操作中很容易出现堵塞现象,尤其是放料时沉淀的纤维沼渣难以放出,虽然将放料口改在罐体的底端,加大放料口管尺寸,也难以解决所有问题,无法适2I O应秸秆沼气池的出换料工作需要。
2秸秆沼气池出料车的研发思路基于秸秆沼气池沼渣的特点,对农村户用秸秆沼气池中纤维质沼渣宜用抓取的方式进行出换料,同时采用这一出料方式秸秆无需进行切断粉碎即可使用.可简化秸秆沼气的生产工艺流程,减少粉尘污染,降低秸秆沼气的生产成本。
针对这一思路,利用自主授权专利旋转式抓斗(Z L200420062844.o)、金属网组台高压油管缆绳(z也004200628436.6)等技术,采用抓取的工作方式进行农村户用秸秆沼气池清秸秆出料车(以下简称秸秆出料车)的研发。
农村户用沼气池多设置在农户的庭院后、洼地等交通不便处,沼气池体积一般在6~12m3,其每次出渣工作量不大,秸秆出料车的体积及工作幅度都不需要设计得太大,但对秸秆出料车的机动灵活性要求较高,秸秆出料车需适应在不同地况的工作环境。
目前我国的农村经济还不发达,农民的经济承受力还不高,因此秸秆出料车的价格定位不能太高,且要考虑使用人群的特殊性。
为此,秸秆出料车的结构要做到简沽实用,功能要齐全,操作要易于掌握,安全可靠性要高,以保证能在广大农村得到推广使用。
3秸秆出料车的工作原理3.1秸秆出料车的旋转和变幅基于以上情况的分析,以手扶拖拉机、小四轮拖拉机等为动力源.以拖车箱为主要载体。
在拖车箱底盘上设置旋转底盘,在旋转底盘座卜设置液压马达。
液压马达通过双联变速齿轮驱动旋转底盘的滚动体转动,实现出料机械部分的旋转操作”…。
在底盘上设置一可上下转动的主动臂,通过两只油缸控制其转动;在主动臂上端再设置一可上下转动的副转动臂,通过一只油缸控制其转动,主动臂和副转动臂的转动实现出料机械的变幅操作;通过旋转与变幅配合;实现出料抓斗对沼气池出料口和运输车辆的定位。
出料车结构如图1所示。
由于拖车箱以两轮及拖挂点为支撑,无法满足秸秆出料车出料工作时对平稳性的要求,因此在拖车箱的四角设置了4个可调节的刚性支撑腿。
秸秆出料车到达工作场地开始工作前,先抽出4根支撑腿,转动调节丝杠,使4根支撑腿着地形成支撑,同时调整到场拖车箱底盘至水平状态,保证秸秆出料车工作时对平稳性的要求。
3.2秸秆出料车抓斗的升降和抓卸在主转动臂上设置一抓斗升降油缸,通过抓斗升降油缸活塞杆的伸长或缩短以及牵引抓斗升降钢丝绳伸长或缩短,以实现抓斗的升降操作。
抓斗升降钢丝绳一端固定在主动臂上端,然后钢丝绳绕过固定在升降油缸活塞杆顶端的定滑轮、固定在主动臂上的定滑轮、固定在副转动臂顶端的定滑轮,最后钢丝固定在抓斗的吊环上。
活塞杆的往复运动使钢丝绳伸长、缩短,实现抓斗上升或下降任务。
抓斗的开合抓取和放卸秸秆沼渣的动作通过设置在抓斗上端的开合油缸的活塞杆推动抓斗架上的连杆机构实现。
通过以上旋转、变幅、升降和开合等各机械部分的功能组合,最终实现了可升降、转动的秸秆沼渣出料工作,示意图如图2所示。
秸秆出料车全套机械的操作全部通过液压动力来实现.以适应秸秆沼气池实际进出料工作环境的需要。
8I液压马达2主动臂3变幅油缸I4抓斗升降油缸5变幅油缸Ⅱ6副转动臂7抓斗开合油缸8抓斗图1秸秆沼气池出料车机械结构示意图Fi g11k glm cl删heme of t he咖chi m如r Btr州ge一6“g pt di孵ha‘ge图2秸秆稆气池出料军工作乐意图Fl g21k幽a n of山…hine如r sLm”Ee帅【‘Il g pi t出scha昭…w o^hg 3.3秸秆出料车的液压工作原理秸秆沼气池进出料工作环境中无法利用电力等固定动力源,因此其各项操作的动力要靠动力车提供。
液压系统是本机械实现秸秆沼渣出料功能的主要动力源提供部分,其工作原理为:以动力车的发动机为动力源。
发动机动力传至离合器,由离合器控制,经过操作拨叉分离或结合动力控制齿轮泵工作;齿轮泵上作产生液压油产生液压动力,液压油由多路阀进行操作控制,分别驱动液压马达和各油缸工作。
通过三位四通换向节流阀控制液压马达的转向.实现转盘的左右两个方向转动。
转盘通过自锁油缸达到固定的目的,转动时液压油通过单向阀打开自锁油缸,以利转动操作。
变幅油缸和升缩油缸、抓斗升降油缸、抓斗开闭油缸都是通过各三位四通换向节流阀控制其驱动工作方向的。
秸秆沼渣出料中工作精度无特殊精密的定位要求,为控制本机械的总体成本。
液压回路采用简单结构,操作中通过控制操作速度,实现减小液压冲击的作用,秸秆沼气池出料车液压工作原理如图3所示。
(童幅)(变幅)(伸缩)(抓斗升降)(抓斗开台图3液压原理图Fi g 31、egt ⅢcI ㈣hef 岫0f h ,dr aI 血如i 啷d 山em 扯h I ne breI 伯”詈e 一“ng 西Idi 跎h a 7皋e4抓吸料一体车的工作原理根据众多资料介绍和实际考查显示,目前我国农村户用秸秆沼气实质上是秸秆与粪便混合使用的综合沼气生产方式”4,其沼渣中既有纤维质沼渣,又有颗粒类沼渣。
基于目前我国农村户用秸秆沼气池沼渣的特点,秸秆沼渣的出料应分步进行,即先进行纤维质沼渣的出料清理,再进行颗粒类沼渣及沼液的出料清理‘1”。
基于这一实际情况,将禽畜粪便类沼气池出料用沼液清渣出料车和秸秆沼气用沼气池清秸秆出料车两项技术进行嫁接,研发出适合现农村户用秸秆沼气池出料的秸秆沼气池抓吸料一体车。
先用抓取的方法清除秸秆沼气池中纤维质沼渣。
再用抽吸的方法清除剩余的沼液、沼渣。
为防止残余纤维质沼渣的影响,将吸排口设置于罐体的下端,同时增大其尺寸,以防止堵塞现象的产生。
田4抓暖料一体车示意图F 培4necha^of Ⅱk 啦chi 旭脚蛐d 丑II 唧““g 眦Ien —ofB hw b ;‘’目口啷idu ∞4结论农作物秸秆沼气化利用,在改善农业生态系统内部物质循环方面有着无可比拟的优越性。
沼气池清秸杆出料车实现全机械化清除池中长短作物秸秆。
这一项目成功解决了农村户用秸秆沼气池的出料难题,极大地推进了农村户用秸秆沼气池的推广进程,为农业循环经济建做出了极大的贡献。
但随着农村土地使用的规模化、集中化,农村居住格局也将产生重大变化(集中化、小区化趋势),而农村户用秸秆沼气池也将向大中型秸秆沼气池转型。
对于大中型秸秆沼气池,由于其池体面积大、深度深(一般都在数百立方以上),本机械工作范围及工作效率都难以适应其要求。
从目前大中型秸秆沼气池试点使用情况看,现试点中的大型秸秆沼气池的出料主要使用工程挖掘机械完成这一作业,但其使用费用太高,且操作中容易损坏沼气池池壁,针对大中型秸秆沼气池的出换料机械有待开发,以保障大中型秸秆沼气池的推广。
参考文献:[1]农业部新闻办公室.全国农作物秸秆资源调杳与评估报告[EB /O L ]“20l l 一0l 一2I ]ht t p ://w w w .Phf l m 。
印v .c ∥fLi cl e /C18蜡14/20110l /7118.hl m l .[2]庞风梅.农作物秸秆沼气发酵与直接利用效益比较[J]中国沼气,2008(02):34—37[3]焦瑞莲秸秆沼气生产关键技术[Jj 科学种养,2010(7):52[4]刘冰稻秸秆化学成分分析及研究[J ].河北纺织.20l o(4):22—25.【5]薛民琪.任彬,陆胜龙秸秆沼气关键技术研究与应用[J].农业环境与发展.2009(6):34—38(下转第23l 页)2012年4月农机化研究第4期[14]岳冬菊.陕南秦巴山区农业持续发展问题探讨[J].咸[15]程根伟.我国西南地区的水供应和粮食生产潜力[J]阳师范学院学报,200l,16(4):72—74.山地学报,2000,18(5):408~414.A nal yze on t he U t i l i zat i on of A gr i cul t ur a I R esour ces and t heG r a i n Pr oduct i on Pot e nt i a i n Sout hw es t Pl at eauShi R uj i e(Col l Pge of A gr o nom y and B i ot e chnol ogy,S out hw es t U ni V er s i t y,C hongqi ng400716,Chi na)A bs t r a c t:Thi s pa pe r di s cusses t he s t a t u s of a鲥cul t ur al r es ou r ces a nd t he exi s t i ng pm hl P m s,cur r e nt s i t uat i on of gr ai n pr oduct i on a nd pm duct i ve pot ent i al i t y.Funhe珊or e,s o m e basi c i deas on t he i m pm vf I m ent of伊ai n pr oduc t i on pot ent i aL I ar e concl ude d,i ncl udi ng pos i t i V el y deV e l ops t he zoni ng r ot at i on pr act i ce sys t em and i m pr ove m ul t i pl e cr o p i ndex;pay at t ent i on t o t he i m pm v em ent of i nt em a l pr()duct i V i t y of铲a i n cm ps popul at i ony,i nc r ease s ci e nce and t e chnol ogy i nnova—t i on,s t r engt hen t he s uppor t i ng e正f.e ct of agr i cul t ur e sci ence and t echnol og,,t o gr ai n pr oduct i on;r e duc e t he no—t ar get out—put i n a咖cul t ur aI r unof f s of t he sl opi ng f a肿l and;pay at t ent i on t o t he c ons t l l l ct i on of qual i t y of ar abl e l and,i m pr ove t he s ecur i t),of cul t i V at ed l and of gr ai n pr oduct i on abi l i t y.K ey w or ds:ut i l i za t i on of a萌cul t ur al r es our ce s;铲a i n pr oduct i on pot en t i al;ar ea of sout hw est pl a t eau(上接第212页)[6]倪圣亚.秸秆沼气技术研究与应用展望[J].江苏农业科学,2010(3):458—459.[7]方淑荣.我国农村沼气产业化发展的制约因素及对策[J].农机化研究,2010,32(2):216—219.[8]陈羚.我国秸秆沼气工程发展现状与趋势[J].可再生能源,2010(3):145一148.[9]吕建强.机械式沼液清渣出料车的研发[J].农机化研A bs t r a ct l D:l003一188X(2012)04一02l O—E A [10][12]究,201l,33(3):223—226.淮安市苏通市政机械有限公司.沼气池清秸杆出料车:中国,z L2009l0024725.3[P].2010—0l一01.淮安市苏通市政机械有限公司.旋转式抓斗:中国,z L200420062844.0[P].2005—09—21.淮安市苏通市政机械有限公司.沼气池抓吸料一体车:中国,Z L200920231433.2[P].2010一08一04.T he St udy of C l eani ng M acl l i ne U s e d t o C l ean t heM et hane R es i duar v Sol ut i onLv J i anqi an91,Zhang M anl,W ang“an2,Zhao G uangyi3,H u Y uj un4(1.D epar t m ent of M e c hani cal E ngi ne e r i ng,H uai yi n I ns t i t ut e of Technol og)r,H uai’肌223003,C hi na;2.H uai’an Shi Sut ong S hi zheng Ji xi e C o.,Lt d,H uai’an223200,C hi na;3.H uai’a n B i nhu J i xi e C o.,Lt d,H uai’an223200,C hi na;4.H uai’a n Ti angong1'r ans m i s s i o n Tec hni c al C o.,L t d.,H uai’an223005,C hi na)A bst r act:I t i s t he bes t w ays t o sol ve t he pm bl e m of i dl e s t r a w r es o ur ce t hat t he s t r a w is bm ken dow n t o f o珊m et hane.B ut t he s t r a w bi ogas gene m t i ng pi t needs r ef uel i ng pe r i odi c aU y t o en s ur e t he gas gener a t i ng V el oci t y and em ci e ncy.M or e—over,bec ause t her e a r e a gr eat deal of f i br es i n t I l e s t r aM w ast e,i t i s eas y t o bl ock up i n t he oper a t i on pm ces s w hen ex-t ract i on cl ean i ng m achi ne i s use d t o cl e卸t he m et hane r es i duar y s ol ut i on of l i V es t ock excr em ent.It i s di m c ul t t o adj ust t o t he r ef uel i ng r e qui r em ent s of t he st r ar w bi ogas gener at i ng pi t.T he pr obl em of s t r a w bi ogas gener a t i ng pi t di s cha哂ng h鹪been t he bot de ne ck of t he s t m w bi ogas ext ensi on.Thi s pa pe r br i eny i nnD duce s a ki nd of gr a s p—t y pe cl e ani ng m achi ne w hi ch ca n s ol V e t he pr obl e m of s t“,w gener a t i ng pi t di scharge.K ey w D r‘l s:cr o p st r aw;bi ogas r es i dues;bi ogas geneI at i ng pi t;di schar|画ng23l。