mpc003 mpc004 mpc006运动控制芯片模块
步进机电 MPC08 运动控制卡 说明书

4.1 开发 WINDOWS 下的运动控制系统..................................................15 4.1.1 开发 Visual Basic 控制程序 ..................................................................... 15 4.1.2 用 Visual C++开发控制程序 ................................................................... 16
2 控制卡的安装..................................................................6
2.1 硬件安装...........................................................2 软件安装..............................................................................................6
6.5.1 Windows 起动后未出现检测到 PCI Card 的信息 .................................. 47 6.5.2 出现了检测到 PCI Card 的信息,但无法正确加载驱动程序.............. 48 6.5.3 驱动程序安装正确,但无法正常发脉冲 ............................................... 48 6.6 其它问题及解决方法........................................................................49 6.6.1 运行 EXE 文件时系统显示找不到 DLL 文件......................................... 49 6.6.2 如何将开发的软件系统制作成安装程序后发行给最终用户 ............... 49 6.6.3 软件能够正常启动,但无法产生运动 ................................................... 49 6.6.4 如何升级函数库 ....................................................................................... 50 6.6.5 减速、原点信号的使用 ........................................................................... 50 6.6.6 如何提高速度精度 ................................................................................... 50 6.6.7 如何实现方向信号超前于脉冲信号 ....................................................... 51 6.6.8 多卡共用问题 ........................................................................................... 51 6.7 如何避免与其他设备的冲突............................................................51
第二届夏季青年奥林匹克运动会媒体运行通用运行政策与程序

程序描述
1、媒体工作间指定志愿者,专门负责储物柜的租用。
2、租用前,媒体记者需要填写《储物柜租用登记表》,签名后才 能领取钥匙。
3、媒体记者在归还储物柜的钥匙时,需要在《储物柜租用登记 表》上签字。
4、在媒体记者存放和取回存放在储物柜的物品时,专门负责存物 柜租用的志愿者需要仔细确认存入和取出的物品。
4、转播信号包括9路体育赛事直播信号、1路24小时播出的青奥频 道(YOGC)信号及3路风景机位信号。
5、青奥频道旨在用英语评论和推荐的图片向青年观众呈现直播和 准直播的报道、专题、运动员风貌、文化故事、音乐作品、采访和每 日集锦。
6、所有官方视频集锦将上传到国际奥委会的YouTube页面。
程序描述 转播信号由OBS提供。
南京青奥组委将与新华社摄影部合作,提供青奥会图片服务,包 括每日每项赛事、开闭幕式以及文化教育活动的综合图片报道。高分 辨率的图片将通过南京青奥会官方网站()和 Flikr发布和下载。这些图片将免费提供给媒体、国家/地区奥委会和 国际单项联合会编辑使用(不得用于商业目的)。
09:00-18:00
2014年8月12日-28日
07:00-次日02:00
2014年8月29日 IBC运行时间 日期
09:00-18:00 运行时间
2014年8月1日-11日
09:00-18:00
2014年8月12日
9:00开始
2014年8月13日-29日
24小时
2014年8月30日
18:00关闭
政策描述
1、媒体工作间为注册平面媒体提供工位。
2、媒体工作间工位采用“先到先得”的原则。 3、主转播机构、持权转播商和非持权转播商人员原则上不能使用 工位。
IC芯片命名规则大全
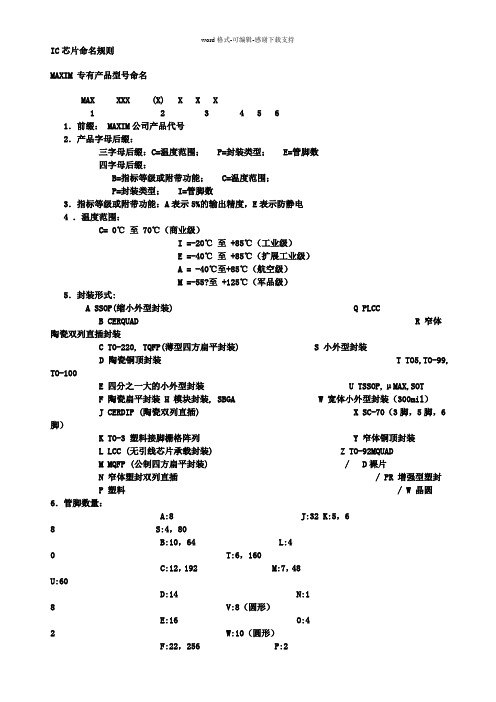
IC芯片命名规则MAXIM 专有产品型号命名MAX XXX (X) X X X1 2 3 4 5 61.前缀: MAXIM公司产品代号2.产品字母后缀:三字母后缀:C=温度范围; P=封装类型; E=管脚数四字母后缀:B=指标等级或附带功能; C=温度范围;P=封装类型; I=管脚数3.指标等级或附带功能:A表示5%的输出精度,E表示防静电4 .温度范围:C= 0℃ 至70℃(商业级)I =-20℃ 至+85℃(工业级)E =-40℃ 至+85℃(扩展工业级)A = -40℃至+85℃(航空级)M =-55?至+125℃(军品级)5.封装形式:A SSOP(缩小外型封装) Q PLCCB CERQUAD R 窄体陶瓷双列直插封装C TO-220, TQFP(薄型四方扁平封装) S 小外型封装D 陶瓷铜顶封装 T TO5,TO-99, TO-100E 四分之一大的小外型封装U TSSOP,μMAX,SOTF 陶瓷扁平封装 H 模块封装, SBGA W 宽体小外型封装(300mil)J CERDIP (陶瓷双列直插) X SC-70(3脚,5脚,6脚)K TO-3 塑料接脚栅格阵列 Y 窄体铜顶封装L LCC (无引线芯片承载封装) Z TO-92MQUADM MQFP (公制四方扁平封装) / D裸片N 窄体塑封双列直插 / PR 增强型塑封P 塑料 / W 晶圆6.管脚数量:A:8 J:32 K:5,68 S:4,80B:10,64 L:40 T:6,160C:12,192 M:7,48U:60D:14 N:18 V:8(圆形)E:16 O:42 W:10(圆形)F:22,256 P:20 X:36G:24 Q:2,100 Y:8(圆形)H:44 R:3,84 Z:10(圆形)I:28AD 常用产品型号命名单块和混合集成电路XX XX XX X X X1 2 3 4 51.前缀:AD模拟器件 HA 混合集成A/D HD 混合集成D/A 2.器件型号3.一般说明:A 第二代产品,DI 介质隔离,Z 工作于±12V4.温度范围/性能(按参数性能提高排列):I、J、K、L、M 0℃至70℃A、B、C-25℃或-40℃至85℃S、T、U -55℃至125℃5.封装形式:D 陶瓷或金属密封双列直插R 微型“SQ”封装E 陶瓷无引线芯片载体RS 缩小的微型封装F 陶瓷扁平封装S 塑料四面引线扁平封装G 陶瓷针阵列 ST 薄型四面引线扁平封装H 密封金属管帽 T TO-92型封装J J形引线陶瓷封装U 薄型微型封装M 陶瓷金属盖板双列直插 W 非密封的陶瓷/玻璃双列直插N 料有引线芯片载体Y 单列直插Q 陶瓷熔封双列直插Z 陶瓷有引线芯片载体P 塑料或环氧树脂密封双列直插高精度单块器件XXX XXXX BI E X /8831 2 3 4 5 61.器件分类: ADC A/D转换器 OP 运算放大器AMP 设备放大器PKD 峰值监测器BUF 缓冲器 PM PMI二次电源产品CMP 比较器 REF 电压比较器DAC D/A转换器 RPT PCM线重复器JAN Mil-M-38510 SMP 取样/保持放大器LIU 串行数据列接口单元SW 模拟开关MAT 配对晶体管SSM 声频产品MUX 多路调制器TMP 温度传感器2.器件型号3.老化选择4.电性等级5.封装形式:H 6腿TO-78 S 微型封装J 8腿TO-99 T 28腿陶瓷双列直插K 10腿TO-100 TC 20引出端无引线芯片载体P 环氧树脂B双列直插V 20腿陶瓷双列直插PC 塑料有引线芯片载体X 18腿陶瓷双列直插Q 16腿陶瓷双列直插 Y 14腿陶瓷双列直插R 20腿陶瓷双列直插 Z 8腿陶瓷双列直插RC 20引出端无引线芯片载体6.军品工艺ALTERA 产品型号命名XXX XXX X X XX X1 2 3 4 5 61.前缀: EP 典型器件EPC 组成的EPROM器件EPF FLEX 10K或FLFX 6000系列、FLFX 8000系列EPM MAX5000系列、MAX7000系列、MAX9000系列EPX 快闪逻辑器件2.器件型号3.封装形式:D 陶瓷双列直插 Q 塑料四面引线扁平封装P 塑料双列直插R 功率四面引线扁平封装S 塑料微型封装 T 薄型J形引线芯片载体J 陶瓷J形引线芯片载体 W 陶瓷四面引线扁平封装L 塑料J形引线芯片载体 B 球阵列4.温度范围: C ℃至70℃,I -40℃至85℃,M -55℃至125℃5.腿数6.速度ATMEL 产品型号命名AT XX X XX XX X X X1 2 3 4 5 61.前缀:ATMEL公司产品代号2.器件型号3.速度4.封装形式:A TQFP封装 P 塑料双列直插B 陶瓷钎焊双列直插Q 塑料四面引线扁平封装C 陶瓷熔封R 微型封装集成电路D 陶瓷双列直插S 微型封装集成电路F 扁平封装T 薄型微型封装集成电路G 陶瓷双列直插,一次可编程U 针阵列J 塑料J形引线芯片载体 V 自动焊接封装K 陶瓷J形引线芯片载体W 芯片L 无引线芯片载体 Y 陶瓷熔封M 陶瓷模块 Z 陶瓷多芯片模块N 无引线芯片载体,一次可编程5.温度范围: C 0℃至70℃, I -40℃至85℃, M -55℃至125℃6.工艺:空白标准/883 Mil-Std-883, 完全符合B级B Mil-Std-883,不符合B级BB 产品型号命名XXX XXX (X) X X X1 2 3 4 5 6DAC 87 X XXX X /883B4 7 81.前缀:ADC A/D转换器MPY 乘法器ADS 有采样/保持的A/D转换器OPA 运算放大器DAC D/A转换器 PCM 音频和数字信号处理的A/D和D/A转换器DIV 除法器 PGA 可编程控增益放大器INA 仪用放大器 SHC 采样/保持电路ISO 隔离放大器 SDM 系统数据模块MFC 多功能转换器 VFC V/F、F/V变换器MPC 多路转换器 XTR 信号调理器2.器件型号3.一般说明:A 改进参数性能 L 锁定Z + 12V电源工作 HT 宽温度范围4.温度范围:H、J、K、L 0℃至70℃A、B、C -25℃至85 ℃R、S、T、V、W -55℃至125℃5.封装形式:L 陶瓷芯片载体 H 密封陶瓷双列直插M 密封金属管帽 G 普通陶瓷双列直插N 塑料芯片载体 U 微型封装P 塑封双列直插6.筛选等级: Q 高可靠性 QM 高可靠性,军用7.输入编码:CBI 互补二进制输入COB 互补余码补偿二进制输入CSB 互补直接二进制输入CTC 互补的两余码8.输出: V 电压输出 I 电流输出CYPRESS 产品型号命名XXX 7 C XXX XX X X X1 2 3 4 5 61.前缀: CY Cypress公司产品, CYM 模块, VIC VME总线2.器件型号:7C128 CMOS SRAM 7C245 PROM7C404 FIFO 7C9101 微处理器3.速度:A 塑料薄型四面引线扁平封装 V J形引线的微型封装B 塑料针阵列 U 带窗口的陶瓷四面引线扁平封装D 陶瓷双列直插 W 带窗口的陶瓷双列直插F 扁平封装 X 芯片G 针阵列 Y 陶瓷无引线芯片载体H 带窗口的密封无引线芯片载体 HD 密封双列直插J 塑料有引线芯片载体K 陶瓷熔封 HV 密封垂直双列直插L 无引线芯片载体 PF 塑料扁平单列直插P 塑料 PS 塑料单列直插Q 带窗口的无引线芯片载体 PZ 塑料引线交叉排列式双列直插R 带窗口的针阵列 E 自动压焊卷S 微型封装IC T 带窗口的陶瓷熔封 N 塑料四面引线扁平封装 5.温度范围:C 民用(0℃至70℃)I 工业用(-40℃至85℃)M 军谩(-55℃至125℃)6.工艺: B 高可靠性HITACHI 常用产品型号命名XX XXXXX X X1 2 3 41.前缀:HA 模拟电路 HB 存储器模块HD 数字电路 HL 光电器件(激光二极管/LED)HM 存储器(RAM) HR光电器件(光纤)HN 存储器(NVM)PF RF功率放大器HG 专用集成电路2.器件型号3.改进类型4.封装形式:P 塑料双列 PG 针阵列C 陶瓷双列直插 S 缩小的塑料双列直插CP 塑料有引线芯片载体 CG 玻璃密封的陶瓷无引线芯片载体FP 塑料扁平封装 G 陶瓷熔封双列直插SO 微型封装INTERSIL 产品型号命名XXX XXXX X X X X1 2 3 4 5 61.前缀: D 混合驱动器 G 混合多路FETICL 线性电路 ICM 钟表电路IH 混合/模拟门 IM 存储器AD 模拟器件 DG 模拟开关DGM 单片模拟开关 ICH 混合电路MM 高压开关 NE/SE SIC产品2.器件型号3.电性能选择4.温度范围:A -55℃至125℃,B -20℃至85℃,C 0℃至70℃ I -40℃至125℃,M -55℃至125℃5.封装形式:A TO-237型 L 无引线陶瓷芯片载体B 微型塑料扁平封装P 塑料双列直插C TO-220型 S TO-52型D 陶瓷双列直插T TO-5、TO-78、TO-99、TO-100型E TO-8微型封装 U TO-72、TO-18、TO-71型F 陶瓷扁平封装V TO-39型H TO- 66型 Z TO-92型I 16脚密封双列直插 /W 大圆片J 陶瓷双列直插/D 芯片K T O-3型 Q 2引线金属管帽6.管脚数:A 8,B 10,C 12,D 14,E 16,F 22,G 24,H 42, I 28, J 32, K 35, L 40, M 48, N 18,P 20, Q 2, R 3, S 4, T 6, U 7,V 8(引线间距0.2"",绝缘外壳)W 10(引线间距0.23"",绝缘外壳)Y 8(引线间距0.2"",4脚接外壳)Z 10(引线间距0.23"",5脚接外壳)NEC 常用产品型号命名μP X XXXX X1 2 3 41.前缀2.产品类型:A 混合元件 B 双极数字电路,C 双极模拟电路D 单极型数字电路3.器件型号:4.封装形式:A 金属壳类似TO-5型封装 J 塑封类似TO-92型B 陶瓷扁平封装 M 芯片载体C 塑封双列 V 立式的双列直插封装D 陶瓷双列 L 塑料芯片载体G 塑封扁平 K 陶瓷芯片载体H 塑封单列直插 E 陶瓷背的双列直插MICROCHIP 产品型号命名PIC XX XXX XXX (X) -XX X /XX1 2 3 4 5 61. 前缀: PIC MICROCHIP公司产品代号2. 器件型号(类型):C CMOS电路 CR CMOS ROMLC 小功率CMOS电路LCS 小功率保护AA 1.8V LCR 小功率CMOS ROMLV 低电压 F 快闪可编程存储器HC 高速CMOS FR FLEX ROM3.改进类型或选择4.速度标示:-55 55ns, -70 70ns, -90 90ns, -10 100ns, -12 120ns-15 150ns -17 170ns, -20 200ns, -25 250ns, -30 300ns晶体标示:LP 小功率晶体,RC 电阻电容,XT 标季/振荡器HS 高速晶体频率标示:-20 2MHZ, -04 4MHZ, -10 10MHZ, -16 16MHZ-20 20MHZ,-25 25MHZ,-33 33MHZ 5.温度范围:空白0℃至70℃,I -45℃至85℃, E -40℃至125℃ 6.封装形式:L PLCC封装JW 陶瓷熔封双列直插,有窗口P 塑料双列直插PQ 塑料四面引线扁平封装W 大圆片SL 14腿微型封装-150milJN 陶瓷熔封双列直插,无窗口 SM 8腿微型封装-207milSN 8腿微型封装-150 mil VS 超微型封装8mm×13.4mmSO 微型封装-300 mil ST 薄型缩小的微型封装-4.4mmSP 横向缩小型塑料双列直插 CL 68腿陶瓷四面引线,带窗口SS 缩小型微型封装 PT 薄型四面引线扁平封装TS 薄型微型封装8mm×20mm TQ 薄型四面引线扁平封装ST 产品型号命名普通线性、逻辑器件MXXX XXXXX XX X X1 2 3 4 51.产品系列:74AC/ACT 先进CMOSHCF4XXX M74HC 高速CMOS2.序列号3.速度4.封装: BIR,BEY 陶瓷双列直插M,MIR 塑料微型封装5.温度普通存贮器件XX X XXXX X XX X XX1 2 3 4 5 6 71.系列:ET21 静态RAM ETL21 静态RAMETC27 EPROM MK41 快静态RAMMK45 双极端口FIFO MK48 静态RAMTS27 EPROM S28 EEPROMTS29 EEPROM2.技术:空白…NMOS C…CMOS L…小功率3.序列号4.封装:C 陶瓷双列 J 陶瓷双列N 塑料双列 Q UV窗口陶瓷熔封双列直插5.速度6.温度:空白0℃~70℃ E -25℃~70℃V -40℃~85℃ M -55℃~125℃7.质量等级:空白标准B/B MIL-STD-883B B级存储器编号(U.V EPROM和一次可编程OTP)M XX X XXX X X XXX X X1 2 3 4 5 6 7 81.系列:27…EPROM 87…EPROM锁存2.类型:空白…NMOS,C…CMOS,V…小功率3.容量:64…64K位(X8)256…256K位(X8)512…512K位(X8)1001…1M位(X8)101…1M位(X8)低电压1024…1M位(X8)2001…2M位(X8)201…2M位(X8)低电压4001…4M位(X8)401…4M位(X8)低电压4002…4M位(X16)801…4M位(X8)161…16M位(X8/16)可选择160…16M位(X8/16) 4.改进等级5.电压范围:空白 5V +10%Vcc, X 5V +10%Vcc6.速度:55 55n,60 60ns,70 70ns,80 80ns90 90ns,100/10 100 n120/12 120 ns,150/15 150 ns200/20 200 ns,250/25 250 ns7.封装:F 陶瓷双列直插(窗口)L 无引线芯片载体(窗口)B 塑料双列直插C 塑料有引线芯片载体(标准)M 塑料微型封装N 薄型微型封装K 塑料有引线芯片载体(低电压)8.温度: 1 0℃~70℃, 6 -40℃~85℃, 3 -40℃~125℃快闪EPROM的编号M XX X A B C X X XXX X X1 2 3 4 5 6 7 8 9 101.电源2.类型: F 5V +10%, V 3.3V +0.3V3.容量: 1 1M, 2 2M, 3 3M,8 8M,16 16M4.擦除:0 大容量 1 顶部启动逻辑块2 启动逻辑块 4 扇区5.结构:0 ×8/×16可选择, 1 仅×8, 2 仅×166.改型:空白 A7.Vcc:空白 5V+10%Vcc X +5%Vcc8.速度:60 60ns,70 70ns, 80 80ns,90 90ns100 100ns,120 120ns,150 150ns,200 200ns 9.封装:M 塑料微型封装N 薄型微型封装,双列直插C/K 塑料有引线芯片载体 B/P 塑料双列直插10.温度:1 0℃~70℃, 6 -40℃~85℃, 3 -40℃~125℃仅为3V和仅为5V的快闪EPROM编号M XX X XXX X XXX X X1 2 3 4 5 6 71.器件系列: 29 快闪2.类型: F 5V单电源V 3.3单电源3.容量:100T (128K×8.64K×16)顶部块,100B (128K×8.64K×16)底部块200T (256K×8.64K×16)顶部块,200B (256K×8.64K×16)底部块400T (512K×8.64K×16)顶部块,400B (512K×8.64K×16)底部块040 (12K×8)扇区,080 (1M×8)扇区016 (2M×8)扇区4.Vcc:空白 5V+10%Vcc, X +5%Vcc5.速度:60 60ns,70 70ns, 80 80ns90 90ns, 120 120ns6.封装:M 塑料微型封装N 薄型微型封装K 塑料有引线芯片载体P 塑料双列直插 7.温度: 1 0℃~70℃, 6 -40℃~85℃, 3 -40℃~125℃串行EEPROM的编号ST XX XX XX X X X1 2 3 4 5 61.器件系列:24 12C ,25 12C(低电压),93 微导线95 SPI总线 28 EEPROM2.类型/工艺:C CMOS(EEPROM) E 扩展I C总线W 写保护士 CS 写保护(微导线)P SPI总线V 低电压(EEPROM)3.容量:01 1K 02 2K,04 4K,08 8K16 16K,32 32K, 64 64K4.改型:空白 A、 B、 C、 D5.封装:B 8腿塑料双列直插M 8腿塑料微型封装ML 14腿塑料微型封装6.温度:1 0℃~70℃ 6 -40℃~85℃ 3 -40℃~125℃微控制器编号ST XX X XX X X1 2 3 4 5 61.前缀2.系列: 62 普通ST6系列63 专用视频ST6系列72 ST7系列90 普通ST9系列92 专用ST9系列10 ST10位系列20 ST20 32位系列3.版本:空白 ROM T OTP(PROM)R ROMless P 盖板上有引线孔E EPROMF 快闪4.序列号5.封装:B 塑料双列直插 D 陶瓷双列真插F 熔封双列直插M 塑料微型封装S 陶瓷微型封装CJ 塑料有引线芯片载体K 无引线芯片载体L 陶瓷有引线芯片载体QX 塑料四面引线扁平封装 G 陶瓷四面扁平封装成针阵列R 陶瓷什阵列T 薄型四面引线扁平封装 6.温度范围:1.5 0℃~70℃(民用) 2 -40℃~125℃(汽车工业)61 -40℃~85℃(工业) E -55℃~125℃XICOR 产品型号命名X XXXXX X X X (-XX)1 2 3 4 5 6EEPOT X XXXX X X X1 2 7 3 4串行快闪 X XX X XXX X X -X1 2 3 4 81.前缀2.器件型号3.封装形式:D 陶瓷双列直插P 塑料双列直插E 无引线芯片载体R 陶瓷微型封装F 扁平封装S 微型封装J 塑料有引线芯片载体T 薄型微型封装K 针振列 V 薄型缩小型微型封装L薄型四面引线扁平封装X 模块M 公∑微型封装 Y 新型卡式4.温度范围:空白标准, B B级(MIL-STD-883),E -20℃至85℃I -40℃至85℃,M -55℃至125℃5.工艺等级:空白标准, B B级(MIL-STD-883)6.存取时间(仅限EEPROM和NOVRAM):20 200NS, 25 250NS, 空白 300ns, 35 350ns, 45 450ns55 55ns, 70 70ns, 90 90ns, 15 150nsVcc限制(仅限串行EEPROM):空白 4.5V至5.5V,-3 3V至5.5V-2.7 2.7V至5.5V,-1.8 1.8V至5.5V 7.端到末端电阻:Z 1KΩ,Y 2KΩ,W 10KΩ,U 50KΩ,T 100KΩ 8. Vcc限制:空白 1.8V至3.6V,-5 4.5V至5.5VZILOG 产品型号命名Z XXXXX XX X X X XXXX1 2 3 4 5 6 71.前缀2.器件型号3.速度:空白 2.5MHz, A 4.0MHz, B 6.0MHzH 8.0MHz,L 低功耗的,直接用数字标示4.封装形式:A 极小型四面引线扁平封装 C 陶瓷钎焊D 陶瓷双列直插E 陶瓷,带窗口F 塑料四面引线扁平封装G 陶瓷针阵列H 缩小型微型封装I PCB芯片载体K 陶瓷双列直插,带窗口L 陶瓷无引线芯片载体P 塑料双列直插Q 陶瓷四列S 微型封装V 塑料有引线芯片载体 5.温度范围:E -40℃至100℃, M -55℃至125℃,S 0℃至70 ℃6.环境试验过程:A 应力密封,B 军品级,C 塑料标准,D 应力塑料,E 密封标准。
运动控制系统中的上位控制单元概述

运动控制系统中的上位控制单元概述摘要:信息时代的高新技术流向传统产业,引起后者的深刻变革。
作为传统产业之一的机械工业,在这场新技术革命冲击下,产品结构和生产系统结构都发生了质的跃变,微电子技术、微计算机技术使信息和智能与机械装置和动力设备相结合,促使机械工业开始了一场大规模的机电一体化技术革命……关键词:运动控制系统上位控制单元方案信息时代的高新技术流向传统产业,引起后者的深刻变革。
作为传统产业之一的机械工业,在这场新技术革命冲击下,产品结构和生产系统结构都发生了质的跃变,微电子技术、微计算机技术使信息和智能与机械装置和动力设备相结合,促使机械工业开始了一场大规模的机电一体化技术革命。
随着计算机电子电力和传感器技术的发展,各先进国家机电一体化产品层出不穷。
机床、汽车、仪表、家用电器、轻工机械、纺织机械、包装机械、印刷机械、冶金机械、化工机械以及工业机器人、智能机器人等许多门类产品每年都有新的进展。
机电一体化技术已越来越受到各方面的关注,它在改善人民生活、提高工作效率、节约能源、降低材料消耗、增强企业竞争力等方面起着极大的作用。
在机电一体化技术迅速发展的同时,运动控制技术作为其关键组成部分,也得到前所未有的大发展。
在一个运动控制系统中“上位控制”和“执行机构”是系统中举足轻重的两个组成部分。
“执行机构”部分一般不外乎:步进电机,伺服电机,以及直流电机等。
它们作为执行机构,带动刀具或工件动作,我们称之为“四肢”;“上位控制”单元的方案主要有四种:单片机系统,专业运动控制PLC,PC+运动控制卡,专用控制系统。
“上位控制”是“指挥”执行机构动作的,我们也称之为“大脑”。
以下,我们将分述系统中的“大脑”中的各个部分,并详尽地论述“PC+运动控制卡”方案。
一、用单片机系统来实现运动控制。
此系统由单片机芯片、外围扩展芯片以及通过搭建外围电路组成。
在“位置控制”方式时,通过单片机的I/O口发数字脉冲信号来控制执行机构行走;“速度控制”方式时,需加D/A转换模块输出模拟量信号达到控制。
Juniper MX系列路由器介绍

瞻博网络MX960 3D Universal Edge路由器是高密度的第二层 和第三层以太网平台,设计用于部署在多种企业和电信运营商以 太网环境中。对于电信运营商,MX960支持广泛的通用边缘应 用,包括面向多点连接的VPLS服务、面向点对点业务的虚拟专 线服务、在整个以太网网络上全面支持MPLS VPN、园区/企业 边缘的以太网汇聚服务以及多业务边缘的以太网汇聚服务等。对 于企业,MX960可用于园区与数据中心的核心和汇聚以及WAN 网关。
高密度端口集中器 (DPC) 为提高以太网密度进行了专门的优 化,最多可支持40个千兆以太网端口或4个万兆以太网端口。 DPC将数据包转发和以太网接口以及40 Gbps数据包转发引擎 (PFE) 无缝集成。DPC与电源和交换控制板 (SCB) 相连接。
MPC专为提高灵活性而设计,可以利用Junos Trio芯片组提供 业界密度最高的千兆以太网和万兆以太网端口,并可在所有MX 产品系列上提供灵活的模块化接口。这些先进的能力使客户可以 灵活地混合和匹配接口,获得专用于特定服务的、“随增长随投 资”的配置。MPC配有PFE,可提供高达120 Gbps的全面的第 三层路由 (IPv4和IPv6) 、第二层交换、内联服务以及每MX系 列插槽先进的H-QoS。
企业和电信运营商希望能够提供连接性和智能业务,以太网正迅速成为他们的首选技 术。虽然他们的要求在某些方面可能有所差异,但当前的先进业务正迫使他们构建更高 性能的网络,以满足服务质量 (QoS) 、网络性能和可用性等方面日渐提高的要求。
除了这些基本要求之外,希望为用户提供差异化体验的电信运营商还发现,他们必须扩 展网络以支持日益增长的带宽、业务和用户。在这三方面扩展容量对于确保下一代业务 获得差异化竞争优势至关重要。
各种注塑机电脑密码

南嵘500型电脑:0926,700型电脑:主管密码是1487加月日就好了。佳明电脑:1688。
ENGEL的密码:00000000,11111111,22222222,进入服务页用06906788;
南嵘500型电脑:0926,700型电脑:主管密码是1487加月日就好了。佳明电脑:1688。
好景电脑:0000,调模密码其实不用,按面板上的“记忆”键。
长新电脑:753159,168899。另有:任意四位数+(小时+位+1)+(分+位+1)+任意四位数
Engel 的秘碼有11111111 然後是22222222, 進入服務頁用06906788
台灣全立發第二代是357159
南嵘是0926,弘迅:1688,9876,好景:0000,格兰是:6092
日钢5517822,友和1688,5858,华大是9595
首先说台中精机7000显示器,到监视画面,再将光标移到画面上所显示的成型机料斗上,(5个*号),再输入98741。
三菱:OPSWITCH-DATAFREE-DATDLOCK-MAKERCON-KISYUSEI-EEPROMWR。
宏讯电脑:5858,9595,6969,1234,4321,1688,9876,重置用:95。二级密码:338168。
三星电脑:001,002,003,004,008,珊星电脑:0002,003,004,005,006,007,008,009。010;
震雄CDC2000显示器,进入介面设定,将始用等级改为4级,在密码输入栏中输入34520261。成型条件被锁,如不知道0级密码,也可将4级密码输入2次即可打开。
多功能控制器(MPC)控制箱的国产化研发

多功能控制器(MPC)控制箱的国产化研发作者:邱武强来源:《珠江水运》2016年第22期摘要:本文介绍了智能型柴油机(ME柴油机)主机上多用途控制器(MPC)箱(以下简称MPC控制箱)的国产化研发与制造,对进口设备的部分功能进行了改进、探索和创新。
关键词:电控系统 MPC 国产化研发与制造由于ME型主机的电气零部件大都为进口件,其国外订货成本高,订货周期长,而且受制于人,因此柴油机制造厂家需提高柴油机电气配套零部件本土化率,做到降本增效,以适应船舶产品对主机性能要求不断提升的需求,提升国际船舶市场竞争能力。
1.MPC控制箱简介ME柴油机MPC多功能控制系统通过把Multi Purpose Controller(MPC)多功能控制模块集中于箱体中实现的,组成包括(如图1):主机界面控制单元(EICU),主要起到一个接口控制器的作用;主机控制单元(ECU),它集成了传统柴油机的部分遥控系统和调速器的功能;气缸控制单元(CCU)控制每缸的喷油、排气及气缸注油以及起动空气等;辅助控制单元(ACU)它控制主机的一些辅助设备,如鼓风机、HPS电动泵等;以及与其他一些控制单元共同组成了一套多功能控制系统。
2.MPC控制箱分类根据箱体形式对MPC控制箱有三种分类:不带ECP接线盒的MPC控制箱、带ECP接线盒的MPC控制箱和ECC箱形式的MPC控制箱。
3.研究内容MPC控制箱主要组成就是箱体、模块以及安装箱体的支架,我们通过对进口箱体的制造技术及工艺要求进行整理消化,对MPC箱体进行试制,以及对电子模块进行采购,并完成整套MPC控制箱的安装,接线,调试工作,并满足IEC 61000-4-2、IEC 61000-4-3电磁兼容要求。
从而满足MPC控制箱部分国产化的需要。
3.1MPC控制箱的试制M PC控制箱,它包括ACU控制箱、ECU控制箱、CCU控制箱、EICU控制箱等,由于这些箱体内主要安装的元器件为多功能控制器模块,对于这种比较精密的模块来说,对环境与箱体的要求比较高,因此,MPC控制箱对EMC(电磁干扰)的要求,即对箱体的屏蔽性要求非常高,这也是此次攻关的难点。
leetro MPC03LX运动控制卡 说明书

MPC03-LV 激光切割控制器接线说明(1.0 版)
3.1.2 双路模拟量独立功率控制
说明: 1, 上图中的激光电源引脚定义由于不同厂家可能会有不同,请确认后连接; 2, 激光电源需要与 MPC03LX 控制器共地; 3, 上图中 MPC03LX 控制器激光开关控制信号为低电平有效的接法; 4, 52 引脚与 50 引脚输出 0~5V 模拟量,并且随软件设置而独立;
MPC03LX 卡的脉冲/方向输出信号,作为步进电机或数字式伺服电机驱动器的 控制信号,脉冲信号的频率决定电机的转速,脉冲信号的个数决定电机的转角。脉 冲和方向信号的接线方法如图 1.2 所示。
MPC03LX 卡取消了编码器反馈输入信号。
1
MPC03-LV 激光切割控制器接线说明(1.0 版)
2 两轴步进控制系统示例
2 轴原点
4 轴负限位
备注 输入 输入 输入 输入 输入 输入 输入 输入 输入 输入 输入 输入 输入 输入 输入 输入 输出 输出 输入 保留 输入 保留 输入 保留 输入
X62 的编号 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54
定义 通用输入 1 通用输入 2 通用输入 3 通用输入 4 通用输入 5 通用输入 6 通用输入 7 通用输入 8 通用输入 9 通用输入 10 通用输入 11 通用输入 12 通用输入 13 通用输入 14 通用输入 15 通用输入 16 24V 电源负 24V 电源正 2 轴负限位
2 轴正限位
4.2 限位开关接线图
4.2.1 限位开关低电平有效
说明: 1, 上图中限位开关接控制器输出电源地; 2, 上图中限位开关信号为低电平有效(通过软件设置); 3, 用户可以根据需要装接限位开关,如不需要则将该引脚悬空或者接控制器输出
控制器系统运动控制技术:实现精确的位置和速度控制

• 运动控制技术逐渐成为自动化控制系统的重要组成部分
• 21世纪,运动控制技术不断发展,呈现出集成化、智能化和网络化的趋势
• 集成化:运动控制技术与其他控制技术相结合,实现多种控制功能的集成
• 智能化:引入人工智能算法,提高运动控制系统的自适应性和智能化水平
汽车的驱动和制动控制
汽车的制动能量回收
• 提高行驶安全性和节能性能
• 提高能源利用效率,降低能
耗
06
控制器系统运动控制技术的未
来发展趋势
工业4.0时代下的运动控制技术
互联网+
大数据
人工智能
• 运动控制技术与互联网相结合,
• 利用大数据分析技术,优化运动
• 引入人工智能算法,提高运动控
实现远程监控和诊断
• 能够提高系统的稳定性和适应性
器等
05
控制器系统运动控制技术的实
际应用案例
机器人运动控制技术的应用案例
01
02
机器人焊接
机器人搬运
• 通过运动控制技术实现机器人的
• 通过运动控制技术实现机器人的
精确焊接轨迹
精确搬运和定位
• 提高生产效率和产品质量
• 提高生产效率和安全性
自动化生产线运动控制技术的应
数调整
• 优点:收敛速度快,可以实现全局最
优化
• 优点:简单易行,适用于初步调试
优解
• 优点:可以实现全局最优解,适用于
• 缺点:依赖于个人经验,难以实现最
• 缺点:对初始参数敏感,容易陷入局
复杂系统
优控制
部最优解
• 缺点:建模复杂,需要专业知识
mpc运动控制算法介绍

mpc运动控制算法介绍
MPc 运动控制算法是一种基于动态系统模型的控制算法。
它通过建立机器人的动力学模型,并使用该模型进行预测,计算出一系列控制指令来优化机器人的运动轨迹。
MPC 算法可以考虑约束条件和优化目标,具有较好的鲁棒性和性能。
MPc 运动控制算法的基本思想是利用被控对象的模型、当前状态和未来的控制量,预测未来的状态,通过滚动的求解带约束的优化问题,实现控制目的。
它具有预测模型、滚动优化和反馈校正三个特点。
MPc 运动控制算法在车辆运动跟踪轨迹的控制中发挥很大的优势,具有很好的前瞻性,考虑到了未来的一个时间窗口内的被控对象状态和控制量。
基于模型预测控制的机械手臂运动控制系统设计

基于模型预测控制的机械手臂运动控制系统设计近年来,随着工业自动化的普及和深入发展,机械手臂已经成为了工厂生产线上必不可少的一部分。
机械手臂可以承担各种各样的工作任务,如搬运、组装、包装等。
而机械手臂的运动控制技术也随着时间的推移得到了不断的发展。
本文将结合基于模型预测控制的方法,对机械手臂运动控制系统进行设计和分析。
一、机械手臂运动控制系统的结构机械手臂运动控制系统,其基本结构如下图所示:图1 机械手臂运动控制系统的结构图机械手臂运动控制系统主要由以下几个部分构成:1.传感器:用于检测机械手臂的位置、速度、力量等参数。
传感器通常包括位置传感器、速度传感器、力传感器等。
2.执行器:根据控制器产生的控制信号,驱动机械手臂改变位置、速度和姿态等参数。
执行器通常包括电动机、伺服电机、液压缸等。
3.控制器:控制器是机械手臂系统的核心部分,其主要作用是对机械手臂进行控制和管理。
控制器通常包括 CPU、存储器、接口模块等。
4.算法模型:控制器中的算法模型是机械手臂控制系统的关键。
其目的就是预测和控制机械手臂的运动轨迹,从而保证机械手臂在执行任务时的安全性和效率。
二、基于模型预测控制的机械手臂运动控制系统模型预测控制(MPC)是一种基于模型的智能控制方法,其主要思想是利用数学模型对系统进行描述和预测。
在MPC方法中,通过不断的改变系统控制输入,将系统的输出与目标标准进行比较,从而实现控制器的输出优化。
MPC方法在很多领域中都有广泛的应用,如人工呼吸、水处理、飞行控制等领域。
MPC方法可以有效地控制机械手臂的运动轨迹,提高机械手臂的精度和效率。
MPC方法的实现基于控制系统的模型,因此,控制系统的建模是MPC方法的关键。
在机械手臂控制系统中,模型通常采用动力学模型和运动学模型。
动力学模型描述系统的力学特性,能够预测系统在外部扰动下的运动状况。
运动学模型则利用关节和末端的位置和姿态等参数来描述系统的运动特性。
MPC方法通过综合运动学和动力学模型的预测结果来控制机械臂的运动轨迹。
NPC三电平逆变器目标合成固定开关频率MPC
第55卷第5期2021年5月电力电子技术Power ElectronicsVol.55, No.5May 2021NPC三电平逆变器目标合成固定开关频率MPC许萌1,郭辉2(1.南京信息职业技术学院,电子信息学院,江苏南京210023;2.西北工业大学,机电学院,陕西西安710072)摘要:为规避有限集模型预测控制(MPC)开关频率随机的问题,设计了一种目标合成固定开关频率优化MPC 方案。
中点箝位(NPC)三电平逆变器对开关损耗敏感,而传统有限集MPC无法保证低幵关频率,因而新方案将调制揉合进入M PC,并将控制目标合成优化,从而实现了恒频和计算效率优化,同时还保持了有限集M PC的所有优点,如快速动态响应、非线性约束以及多变量控制等。
利用5 k W原理样机开展了实验,实验结果表明所设计的固定开关频率MPC具有较好的动静态性能,并网电流总谐波畸变率(TH D)小于2%。
关键词:逆变器;模型预测控制;三电平;固定开关频率中图分类号:TM464 文献标识码:A文章编号:1000-100X(202丨)05-0丨36-05NPC Three-level Inverter Multi-objective SynthesisMPC With Fixed Switching FrequencyX U Meng1, G U O Hui2(\ .Nanjing Vocational College of Information Technology, Nanjing210023, China)A bstract:In order to avoid the problem of random switching frequency of the finite set model predictive control(MPC), a target synthesis fixed switching frequency optimized MPC scheme is designed. Neutral point clamp (NPC) three-level inverter is sensitive to switching losses, while traditional finite set MPC cannot guarantee low switching frequency. Therefore, the new scheme combines modulation into MPC, and the control targets are synthesized to achieve constant frequency and calculation efficiency optimization, while still maintaining all the advantages of finite set MPC, such as fast dynamic response,nonlinear constraints, and multi-variable control.Experiments are carried out using a 5 kW prototype.The experimental results show that the designed fixed switching frequency MPC has good dynamic and static performance, and the grid-connected current total harmonic distortion (THD) is less than 2%.Keywords : inverter ;model predictive control ;three-level ;fixed switching frequencyFoundation Project :Supported by National Natural Science Foundation of China(No.41907361 )l引言随着实时控制数字芯片快速发展,使得MPC 可在电力电子装置中应用有限集M P C的主要 优势在于动态响应快、可处理系统非线性约束以 及使用单控制回路进行多变量控制等。
xc1004四轴SPI插补运动控制芯片
sfr P6M0 = 0xCC;
sfr P7M1 = 0xE1;
sfr P7M0 = 0xE2;
sfr P5 = 0xC8;
sfr SPSTAT
=
sfr SPCTL
=
sfr SPDAT
=
sfr IE2
=
sfr AUXR
=
sfr T2H
=
sfr T2L
=
sfr P_SW2
=
0xcd; 0xce; 0xcf; 0xaf; 0x8e; 0xd6; 0xd7; 0xba;
◆ 设置轴逻辑位置
发送:
功能码 0x12
补充 0 0x00
轴号 1 字节
位置 4 字节
部分参数解释:
轴号(1,2,3,4) 1-4:1-4 轴
位置
轴逻辑位置,范围(-268435455~+268435455)
◆轴停止
发送:
功能码 0x17
轴号 1 字节
模式 1 字节
部分参数解释:
轴号(6)
6:插补核心所有轴停止。
13
XC1004 四轴 SPI 运动控制芯片
运动控制编程参考
通过 51 单片机控制运动控制芯片的 SPI 通信程序示例。
#include <intrins.h>
#include <reg52.h>
//MCU: stc8f2k08s2
sfr P0M1 = 0x93;
sfr P0M0 = 0x94;
sfr P1M1 = 0x91;
sbit b2 = P1^1; sbit b1 = P5^5; sbit led = P3^5;
9
XC1004 四轴 SPI 运动控制芯片
mpc003一体式传真密码机说明书
mpc003一体式传真密码机说明书
1.一体式传真密码机安装位置十分重要,应避免受到阳光直射和热辐射,勿将机器置于潮湿、灰尘多的环境,环境温度应保持在5℃到35℃,相对湿度在25%到85%范围内。
不要把一体式传真密码机安装在有震动和不稳固的地方以及冷、暖机附近。
2.使用单独的电源插座,尽量不与噪声大的机器例如空调、打字机等易产生噪声的机器共用一个插座,以免干扰传真机接收和发送信件的质量。
3.传送和复印文件前,必须将附于文件上的回型针和钉书钉等坚硬物除去。
4.切勿发送和复印过厚的文件以及被弄湿的文件。
5.为了安全,在遇有闪电、雷雨时,传真机宜暂停使用,并且拔去电源及电话线,以免雷击造成一体式传真密码机的损坏。
6.经常使用柔软的干布清洁机器,保持一体式传真密码机的清洁,特别是扫描部分如CCD或CIS以及感热记录头TPH,只能用干净的布或镜头纸清洁,切忌直接用手或不洁布、纸去擦除。
mpc单片机发展历史

mpc单片机发展历史mpc单片机(Microcontrollers)诞生于1971年,经历了SCM、MCU、SoC三大阶段,早期的SCMmpc单片机都是8位或4位的。
其中最成功的是INTEL的8051,此后在8051上发展出了MCS51系列MCU系统。
基于这一系统的mpc单片机系统直到现在还在广泛使用。
随着工业控制领域要求的提高,开始出现了16位mpc单片机,但因为性价比不理想并未得到很广泛的应用。
90年代后随着消费电子产品大发展,mpc单片机技术得到了巨大提高。
随着INTEL i960系列特别是后来的ARM系列的广泛应用,32位mpc单片机迅速取代16位mpc单片机的高端地位,并且进入主流市场。
而传统的8位mpc单片机的性能也得到了飞速提高,处理能力比起80年代提高了数百倍。
高端的32位Socmpc单片机主频已经超过300MHz,性能直追90年代中期的专用处理器,而普通的型号出厂价格跌落至1美元,最高端的型号也只有10美元。
当代mpc单片机系统已经不再只在裸机环境下开发和使用,大量专用的嵌入式操作系统被广泛应用在全系列的mpc单片机上。
而在作为掌上电脑和手机核心处理的高端mpc单片机甚至可以直接使用专用的Windows和Linux操作系统。
mpc单片机主要阶段早期阶段SCM即单片微型计算机(Microcontrollers)阶段,主要是寻求最佳的单片形态嵌入式系统的最佳体系结构。
“创新模式”获得成功,奠定了SCM与通用计算机完全不同的发展道路。
在开创嵌入式系统独立发展道路上,Intel公司功不可没。
Micro Controller Unit中期发展MCU即微控制器(Micro Controller Unit)阶段,主要的技术发展方向是:不断扩展满足嵌入式应用时,对象系统要求的各种外围电路与接口电路,突显其对象的智能化控制能力。
它所涉及的领域都与对象系统相关,因此,发展MCU的重任不可避免地落在电气、电子技术厂家。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
◆ 设置轴位置或编码器值
发送:
起始码 0x68
数据个数 0x09
模块地址 1 字节
功能码 0x12
轴号 1 字节
位置 4 字节
校验和 1 字节
返回:
起始码 0x68
数据个数 0x09
模块地址 1 字节
功能码 0x12
补充 0 5 字节
校验和 1 字节
部分参数解释:
轴号(1-8) 1-6:1-6 轴逻辑位置 7:第 1 路编码器逻辑位置 8:第 2 路编码器逻
5
BUSY
模块忙输出,当模块忙时输出高电平
6
X0
7
X1
0号输入口 1号输入口
8
X2
2号输入口
9
X3
3号输入口
10
X4
4号输入口
11
X5
5号输入口
12
X6
6号输入口
13
X7
7号输入口
14
X8
8号输入口
15
X9
9号输入口
16
Y14
14号输出口
17
Y13
13号输出口
18
Y12
12号输出口
19
P1/Y0
第1轴脉冲信号,0号输出口
部分参数解释: 轴号(1-6) 加速时间 (1-5000)(ms)
减速时间(1-5000)ms 初始速度 初始频率为:值(1-20000)*频率倍率(Hz) 运行速度 运行频率为:值(1-20000)*频率倍率(Hz) 速度倍率 频率倍率(1-100)
补充 0 5 字节
校验和 1 字节
◆ 设置软件限位
模块地址 1 字节
功能码 0x05
校验和 1 字节
返回: 起始码 0x68
数据个数 0x09
模块地址 1 字节
功能码 0x05
各轴状态值 补充 0
1 字节
4 字节
校验和 1 字节
部分参数解释:
各轴状态值(转为 8 位二进制数)
第 1 位表示第一轴状态 第 2 位表示第二轴状态 第 3 位表示第三轴状态 第 4 位表示第四轴状态 第5位表示第五轴状态
发送:
7
MPC 运动控制模块
返回:
起始码 0x68
数据个数 0x09
模块地址 1 字节
功能码 0x13
补充 0 5 字节
校验和 1 字节
部分参数解释:
起始码 数 据 个 模 块 地 功能码 轴号
模式
负方向
数
址
脉冲
0x68
0x0E
1 字节 0x13
1 字节 1 字节 4 字节
辑位置
位置
轴逻辑位置或编码器逻辑位置,范围(-268435455~+268435455)
◆ 等待轴脉冲
发送:
起始码 0x68
数据个数 0x09
模块地址 1 字节
功能码 0x19
轴号 1 字节
脉冲数 4 字节
校验和 1 字节
返回:
9
MPC 运动控制模块
起始码 0x68
数据个数 0x09
<0:负方向移动
◆ 等待延时
8
发送:
起始码 0x68
返回:
起始码 0x68
MPC 运动控制模块
数据个数 0x06
模块地址 1 字节
功能码 0x0e
延时量 2 字节
校验和 1 字节
数据个数 0x09
模块地址 1 字节
功能码 0x0e
补充 0 5 字节
校验和 1 字节
部分参数解释: 延时量(1-10000)MS
返回:
起始码 0x68
数据个数 0x09
模块地址 1 字节
功能码 0x03
补充 0 5 字节
校验和 1 字节
部分参数解释:
输出端口号(0-14) Y0-Y14 输出状态(0,1) 0:输出低电平 1:输出高电平
Байду номын сангаас
◆轴停止
发送: 起始码 0x68
数据个数 0x05
模块地址 1 字节
功能码 0x17
返回: 起始码
电气性能
供电电源 参考时钟 运行速度 计数器输入最大范围 运行精度
5VDC 电流 100MA 100M 10M
-134,217,728~+134,217,727 (28 位) +-0.1%
2
正交编码接口 控制轴数 脉冲输出 方向输出
MPC 运动控制模块
2 路(mpc004)
单片机发送和接收指令的数据格式如下:
5
起始码 0x68
数据个数 1 字节
模块地址 1 字节
MPC 运动控制模块
功能码 1 字节
参数… …
校验和 1 字节
起始码:为一条指令的起始字节内容,固定为 0x68。 数据个数:为从数据个数开始到校验和的数据长度。
起 始 数 据 模 块 功 能 X 轴号 Y 轴号 终 点 终 点 圆 心 圆 心 运 动 校 验
◆等待轴停止
发送:
起始码 0x68
数据个数 0x05
返回:
起始码 0x68
数据个数 0x09
部分参数解释:
模块地址 1 字节
功能码 0x09
模块地址 1 字节
功能码 0x09
11
轴号 1 字节
补充 0 5 字节
校验和 1 字节
校验和 1 字节
轴号(1-6)
MPC 运动控制模块
指令通讯协议与运动控制编程开发
MPC 运动控制模块与单片机串口通讯速率为 115200bps,数据位为 8 位,停止位 1 位,无校验。 单片机与 mpc 运动控制模块采用串口应答式通讯,单片机作主机,单片机每发送一条指令给 mpc 运动控 制模块,mpc 运动控制模块返回以 0x68 开始的固定长度为 10 个字节的数据串。单片机可以取出需要的数 据。一般情况需接收到 mpc 运动控制模块返回的数据后单片机才能发送下一条指令。如果程序中不接收模 块返回的数据,需间隔 20MS 以上才能发送下一条指令。
26
D4/Y7
第4轴方向信号,7号输出口(mpc004为第1路正交编码B口)
27
P5/Y8
第5轴脉冲信号,8号输出口
28
D5/Y9
第5轴方向信号,9号输出口
29
P6/Y10 第6轴脉冲信号,10号输出口(mpc004为第2路正交编码A口)
30
D6/Y11 第6轴方向信号,11号输出口(mpc004为第2路正交编码B口)
X 脉 冲 Y 脉 冲 运 动 方 校验和
数
数
式
4 字节 4 字节 1 字节 1 字节
◆ 二轴圆弧插补
发送:
6
MPC 运动控制模块
0x68 0x17 1 字节 0x08 1 字节 1 字节 4 字节 4 字节 4 字节 4 字节 1 字节 1 字节
返回:
起始码 0x68
数据个数 0x09
模块地址 1 字节
功能码 0x08
补充 0 5 字节
校验和 1 字节
部分参数解释: X 轴号 参与插补 X 轴的轴号(1-6) Y 轴号 参与插补 Y 轴的轴号(1-6) 终点坐标 圆弧插补的终点位置(相对于起点),范围(-268435455~+268435455) 圆心坐标 圆弧插补的圆心点位置(相对于起点),范围(-268435455~+268435455) 运动方式 0:顺时针插补 1:逆时针插补
MPC 运动控制模块
MPC 运动控制模块
使 用 说 明
1
概述
MPC 运动控制模块
MPC 运动控制模块采用新型 FPGA 设计,集成实用运动控制功能, 可与普通单片机通过串口通讯对步进电机和伺服电机控制。体积小巧, 性能稳定可靠,使用简单方便,可组成各种运动控制系统。 ◆ 串口通讯,仅需使用几条指令,简单可靠。 ◆ 单模块最高六轴输出,多个模块组网工作可达 120 轴。 ◆ 单模块最高二路正交编码器输入接口。 ◆ 最大脉冲输出频率为 2MHz,脉冲输出使用脉冲+方向方式。 ◆ 最高六轴独立运动控制,任意两轴直线插补,任意两轴圆弧插补。 ◆ 每轴一路硬件回原点。 ◆ 模块带 1000 条指令缓存深度,指令先进先出,无需高速通讯。 ◆ 模块体积小巧,仅 3.5*2.5*1.5cm,双排直插 30 脚。
数据个数
模块地址
10
功能码
轴号 1 字节
补充 0
校验和 1 字节
校验和
0x68
0x09
1 字节
MPC 运动控制模块
0x17
5 字节
1 字节
部分参数解释:
轴号(1-8)需停止的轴号 1-6:1-6轴停 7:直线插补轴停 8:圆弧插补轴停
◆等待输入口状态
发送:
起始码 0x68
◆获取各轴逻辑位置或编码器值
发送:
起始码 0x68
数据个数 0x05
模块地址 1 字节
功能码 0x06
轴号 1 字节
校验和 1 字节
◆读序列号
起始码 0x68
返回
起始码 0x68
数据个数 0x04
模块地址 0x00
数据个数 0x09
模块地址 0x00
功能码 0x0c
部分参数解释: 序列号: 32 位序列号
功能码 0x0c
校验和 1 字节
序列号 4 字节
补充 0 1 字节
校验和 1 字节
◆获取各轴工作状态
发送:
起始码 0x68
数据个数 0x04
码
个数 地址 码
坐标 X 坐标 Y 坐标 X 坐标 Y 方式 和