张正友
张正友标定法计算焦距
张正友标定法计算焦距张正友标定法是一种常用于计算相机焦距的方法。
该方法被广泛应用于计算机视觉领域,具有较高的精度和准确性。
下面将详细介绍张正友标定法的原理和步骤,并解释如何使用该方法计算相机的焦距。
一、张正友标定法的原理张正友标定法是基于相机投影几何原理的。
它通过使用已知的标定标志(通常是棋盘格模式)和相机拍摄的一系列图像,来计算相机的内部参数(如焦距、主点坐标)和外部参数(如相机的旋转矩阵和平移向量)。
其中,焦距是我们想要计算的重要参数之一。
二、张正友标定法的步骤1.准备标定标志:选择适当的标定标志,通常是棋盘格模式。
保证标志在图像中具有足够的对比度,且标志的尺寸要能够满足实际需求。
标定标志需贴在平整的表面上,以保持标志的形状和位置稳定。
2.拍摄图像:使用相机对标定标志进行拍摄,要保证拍摄时相机的位置和姿态有一定的变化。
可以采用不同的角度、距离和姿态进行多次拍摄,以提高标定结果的准确性。
3.检测角点:对于每张拍摄的图像,需要使用图像处理算法来检测标定标志中的角点。
通常使用角点检测算法(如Harris角点检测算法)或者直接使用OpenCV提供的函数来进行角点检测。
4.提取角点坐标:通过角点检测算法得到角点的像素坐标后,将其保存到一个列表中。
确保每个角点的像素坐标与标定标志上的物理坐标对应。
5.计算内部参数:根据已知的标定标志的物理坐标和对应的像素坐标,使用张正友标定法计算相机的内部参数,如焦距和主点坐标。
通过最小二乘法或其他优化算法,对标定标志的物理坐标和像素坐标之间的关系进行求解。
6.计算外部参数:在已知相机的内部参数的情况下,通过解一组方程,可以计算出相机的外部参数,如旋转矩阵和平移向量,描述相机的位置和姿态。
7.评估标定结果:评估标定结果的准确性和稳定性,可以计算重投影误差,即将像素坐标通过标定结果转换为物理坐标,再将物理坐标通过标定结果转换为像素坐标,然后计算两者之间的差距。
较小的重投影误差表示标定结果较为准确。
张正友标定法matlab代码

张正友标定法是相机标定中常用的一种方法,通过该方法可以实现相机内外参数的标定。
在使用张正友标定法进行相机标定时,需要编写相应的matlab代码来实现算法。
下面将介绍如何使用matlab实现张正友标定法,并给出相应的matlab代码。
1. 准备标定板图像首先需要准备一组包含标定板的图像,标定板上应具有特定的特征点,例如棋盘格。
这些图像将用于计算相机的内外参数。
2. 读取标定板图像使用matlab的imread函数读取准备好的标定板图像,将图像存储为一个cell数组。
```matlabimages = cell(1,N);for i = 1:Nfilename = ['image',num2str(i),'.jpg'];images{i} = imread(filename);end```3. 提取标定板角点利用matlab的detectCheckerboardPoints函数提取标定板图像中的角点坐标,将提取的角点保存到一个cell数组中。
```matlabimagePoints = cell(1, N);for i = 1:NI = images{i};[imagePoints{i}, boardSize] = detectCheckerboardPoints(I); end```4. 标定相机参数使用matlab的estimateCameraParameters函数对提取的角点进行相机参数标定,得到相机的内外参数。
```matlab[cameraParams, imagesUsed, estimationErrors] = estimateCameraParameters(imagePoints, worldPoints,'EstimateSkew', true, 'EstimateTangentialDistortion', true);```5. 查看标定结果可以利用标定得到的相机参数对新的图像进行矫正,并查看标定结果的精度。
张正友标定法
小组成员:张文豪 张智宇 陈宇
一、张正友标定法简介
目 二、张正友标定法数学原理 录 三、张正友标定法程序实现
四、标定实验及结果
张正友标定法 简介
像机标定:
建立摄像机图像像素位置与场景点位置 之间的关系,其途径是根据摄像机模型, 由已知特征点的图像坐标求解摄像机的 模型参数。
➢ 张正友标定法是张正友教授于1998年 在名为“A Flexible New Technique for Camera Calibration”一文中提 出的单平面棋盘格的摄像机标定方法。
➢ 透视投影
像平面 光心
f z
x=RX +
r01 r11
r02 r12
X Y
Tx Ty
z r20 r21 r22 Z Tz
[R,T]矩阵被称为外参数
光轴
K=
x f
y
0
1 0
K1K2
0 0 xc
f
0
yc
0 1 zc
u 1/ dx
v
B
K
T
K
1
B21
B22
B23
B31 B32 B33
b [B11, B12 , B22 , B13, B23, B33 ]
化简 hiT Bhj VijTb 得:
Vij [hi1hj1, hi1hj2 hi2hj1, hi2hj2 , hi3hj1 hi1hj3 , hi3hj2 hi2hj3 , hi3hj3 ]T
0
1 0
0 1/ dy
0
u0 x
v0
y
1 1
K矩阵被称为内参数
K1 K2
➢ 单应性映射
摄像机标定张正友教材

~ ~ sm HM
上式中包含XY 两个方程;H为3乘3矩阵,包 含一个齐次坐标与8个未知数,要求出H,至 少需要8个方程,也就是说,一幅图片至少需 要已知的4个点才能求出H。
求解内置参数矩阵A
r1 r2 1
1
A 1h1 A 1h2
T T 1 h1 A A h2 0
T T 1 T T 1 h1 A A h1 h2 A A h2
精度高,过程复杂,需要高精度已知信息。 2.主动视觉摄像机标定方法 已知摄像机的某些运动信息。可线性求解,鲁棒性高, 但大多数场合不能得到摄像机运动信息。 3.摄像机自标定方法 靠多幅图像之间的关系进行标定,灵活性强,非线性 标定, 鲁棒性不高。
2 成像变换与摄像机模型、参数
• 图像数字化
O1在 u , v 中的坐标为 u 0 , v0 象素在轴上的物理尺寸为 dx, dy
基于三个非共线点在特殊运动下的摄像机标定
• 我们知道至少三点可以确定一个平面,而张正友的标定方 法正是基于两个平面的匹配,所以三个非共线点的标定方 法理论是可行的。 该方法步骤: • 1 旋转3个非共线点 • 2 得到中心点O与o坐标 • 3 根据约束条件建立方程 • 4 求解内参矩阵K • 5 求解外参[R,t] 图像的成像模式:
(v11 v22 )T b 0
T
vij b
T
h A A h2 0
T T 1 h1T AT A1h1 h2 A A h2
v12T b 0 (v11 v 22)T
Vb 0
• B矩阵的解出,相机内参矩阵A也就求解出,从而每张图像的 R,t也迎刃而解
6.通过求最小参数值,优化所有的参数
张正友标定法标定过程
张正友标定法标定过程引言标定是计算机视觉中一项重要的任务,其目的是通过对图像进行处理和分析,确定摄像机的内部参数(如焦距、主点)和外部参数(如旋转矩阵、平移向量),以及相机与世界坐标系的对应关系。
标定的结果可以用于摄像机定位、三维重建、运动捕捉等应用。
张正友标定法是一种经典的标定方法,本文将详细介绍张正友标定法的标定过程。
一、准备标定板首先,需要准备一个黑白相间的标定板。
该标定板上的黑白格子应具有一定的大小和间距,以便于摄像机观测和提取特征点。
标定板应该是平整的,并且材质不能过于反光,以免产生光斑影响标定结果。
二、摄像机采集图像接下来,需要使用摄像机采集一系列至少30张以上的图像。
这些图像应该涵盖尽可能多的摄像机视角和姿态,以保证标定结果的准确性。
在采集图像过程中,需要注意保持摄像机光轴垂直于标定板,以避免图像畸变对标定结果的影响。
三、提取标定板角点在摄像机采集的图像中,需要提取标定板的角点作为特征点。
可以使用图像处理算法(如Canny边缘检测算法)定位标定板的边缘,并通过角点检测算法(如Harris角点检测算法)提取角点。
提取到的角点需要按照从左上角到右下角的顺序进行排序,并保存到一个列表中。
四、计算相机内参数在进行相机标定之前,需要先计算相机的内参数。
相机的内参数主要包括焦距、主点和像素宽度、高度等信息。
为了计算这些参数,需要知道标定板上每个角点的实际坐标。
实际坐标可以通过测量标定板的尺寸得到。
还需要知道摄像机坐标系与世界坐标系的对应关系。
在张正友标定法中,通常使用棋盘格标定板,其中每个黑白格子的实际宽度和高度都可以事先测量得到。
五、计算相机外参数有了相机的内参数后,可以通过张正友标定法计算相机的外参数。
相机的外参数主要包括旋转矩阵和平移向量,它们描述了摄像机坐标系如何变换到世界坐标系。
首先,需要使用摄影测量方法计算出相机观测到的每个角点在图像中的像素坐标。
然后,可以利用相机的内参数和标定板上角点的实际坐标,通过最小二乘法求解出相机的旋转矩阵和平移向量。
张正友标定法

内外参数求解 令:
B11 B K T K 1 B21 B31 B12 B22 B32 B13 B23 B33
b [B11, B12 , B22 , B13 , B23 , B33 ]
化简
hiT Bhj VijT b
得:
Vij [hi1hj1, hi1hj 2 hi 2hj1, hi 2hj 2 , hi3hj1 hi1hj 3 , hi 3hj 2 hi 2hj 3 , hi 3hj 3 ]T
透视投影
像平面 光心 光轴
K = K1K2
x f y 0 1 0 0 f 0 0 xc y 0 c 1 zc
K1
0 u0 x u 1/ dx v 0 1/ dy v0 y 0 1 1 0 1
K2
f
z
K矩阵被称为内参数
单应性映射
X u X Y K [ r r r t ] K [ r r t ]Y s v 1 2 3 1 2 0 1 1 1
单应性(homography): 在计算机视觉中被定义 为一个平面到另一个平面的 投影映射。
内参解算
畸变矫正
V12 (V V )T b 0 11 22
由于摄像机有5个未知内参数,所 以当所摄取得的图象数目大于等 于3时,就可以线性唯一求解出K。
内参数
v0 ( B12 B13 B11 B23 ) / ( B11 B12 B12 2 ) 2 B33 [ B13 v0 ( B12 B13 B11 B23 )] / B11 / B 11 2 ) B11 / ( B11 B12 B12 2 B / 12 2 u0 v0 / B13 /
相机几何标定方法
相机几何标定方法
1. 嘿,你知道吗?相机几何标定方法之一就是张正友标定法哦!就好像给相机戴上了一副超级精准的眼镜,让它能看清这个世界的每一个角落。
比如你想拍一个小小的玩具,通过张正友标定法,就能让玩具的每个细节都清晰呈现,是不是很神奇呀?
2. 哇塞,还有棋盘格标定法呢!这就像是相机的秘密武器呀。
想象一下,把那棋盘格放在那里,相机就能通过它找到自己的定位,然后拍出超棒的照片。
就像你根据地图找到宝藏一样,棋盘格就是相机的宝藏地图,酷不酷?
3. 嘿呀,直接线性变换标定法也很厉害呢!它就如同给相机安装了一个精准的导航系统,能够指引相机拍出最完美的画面。
比如你拍一座大楼,它能让相机准确找到最佳角度,把大楼的雄伟展现得淋漓尽致,这可太牛啦!
4. 还有自标定法哦!这简直就是相机的自我探索之旅呀。
它不用借助其他外在的东西,自己就能慢慢摸索出怎么来标定。
就好像一个勇敢的探险家,自己在未知的领域探索出正确的道路,是不是很了不起?
5. 哇哦,圆形标定法也是有意思得很呢!相机通过识别那些圆圆的东西来校准自己,就好比我们通过认路牌找到目的地一样。
你想想看,当相机通过这些圆形准确找到拍摄的方向,多有意思呀!
6. 最后呀,Bundle 调整标定法也不能落下呀!它就像是一个神奇的魔术棒,能让相机的标定效果达到最佳。
就如同一场精彩的魔术表演,最后呈现出令人惊叹的效果,你能不期待吗?
在我看来呀,这些相机几何标定方法都各有各的神奇之处,它们能让相机变得更强大,为我们拍出更多精彩的照片!。
张正友标定方法

张正友标定方法张正友标定方法是一种常用的相机标定方法,它可以用于计算相机的内部参数和外部参数,从而实现对图像的准确测量和三维重建。
下面将详细介绍张正友标定方法的原理和步骤。
一、原理张正友标定方法基于相机成像原理,通过对已知大小的标定板进行拍摄,从而得到标定板在图像中的像素坐标和实际物理坐标,进而计算出相机的内部参数和外部参数。
其中,内部参数包括相机的焦距、主点坐标和畸变系数,外部参数包括相机的旋转矩阵和平移向量。
二、步骤1. 准备标定板标定板可以是黑白相间的棋盘格或者其他规则的图案,要求图案清晰、对比度高、边缘锐利,同时要求标定板的大小足够大,以便在不同距离和角度下进行拍摄。
2. 拍摄标定板将标定板放置在平面上,保持相机与标定板垂直,同时保持相机位置和姿态不变,拍摄多张标定板的照片,要求标定板在不同位置和角度下都有足够的覆盖面积。
3. 提取角点使用图像处理软件对标定板的照片进行处理,提取出标定板上每个方格的角点坐标,要求角点坐标的提取精度高、稳定性好。
4. 计算内部参数根据相机成像原理,将标定板上每个角点的像素坐标和实际物理坐标进行对应,利用最小二乘法计算出相机的内部参数,包括焦距、主点坐标和畸变系数。
5. 计算外部参数根据标定板在不同位置和角度下的拍摄照片,利用三维重建算法计算出标定板在相机坐标系下的位置和姿态,进而计算出相机的旋转矩阵和平移向量。
6. 验证标定结果将标定结果应用于实际图像中,进行像素坐标和实际物理坐标的转换,计算出图像中物体的实际尺寸和位置,进而验证标定结果的准确性和稳定性。
三、总结张正友标定方法是一种常用的相机标定方法,它可以实现对相机的内部参数和外部参数的准确计算,从而提高图像的测量和三维重建精度。
在实际应用中,需要注意标定板的选择和摆放、角点的提取精度和稳定性等问题,以保证标定结果的准确性和可靠性。
SLAM入门之视觉里程计(6):相机标定张正友经典标定法详解
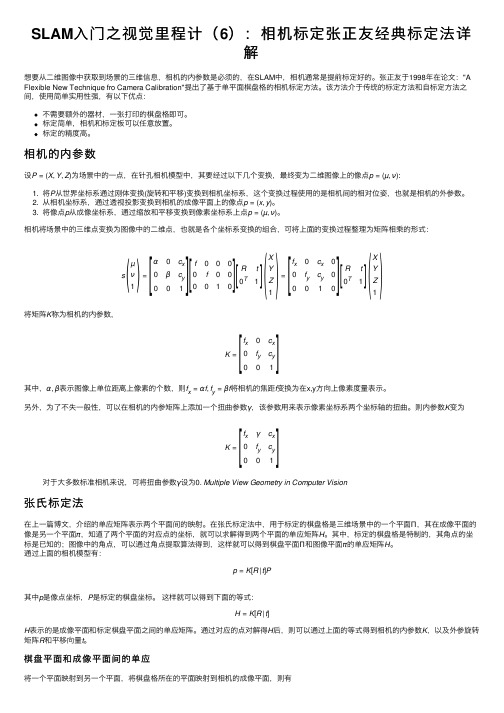
SLAM ⼊门之视觉⾥程计(6):相机标定张正友经典标定法详解想要从⼆维图像中获取到场景的三维信息,相机的内参数是必须的,在SLAM 中,相机通常是提前标定好的。
张正友于1998年在论⽂:"A Flexible New Technique fro Camera Calibration"提出了基于单平⾯棋盘格的相机标定⽅法。
该⽅法介于传统的标定⽅法和⾃标定⽅法之间,使⽤简单实⽤性强,有以下优点:不需要额外的器材,⼀张打印的棋盘格即可。
标定简单,相机和标定板可以任意放置。
标定的精度⾼。
相机的内参数设P =(X ,Y ,Z )为场景中的⼀点,在针孔相机模型中,其要经过以下⼏个变换,最终变为⼆维图像上的像点p =(µ,ν):1. 将P 从世界坐标系通过刚体变换(旋转和平移)变换到相机坐标系,这个变换过程使⽤的是相机间的相对位姿,也就是相机的外参数。
2. 从相机坐标系,通过透视投影变换到相机的成像平⾯上的像点p =(x ,y )。
3. 将像点p 从成像坐标系,通过缩放和平移变换到像素坐标系上点p =(µ,ν)。
相机将场景中的三维点变换为图像中的⼆维点,也就是各个坐标系变换的组合,可将上⾯的变换过程整理为矩阵相乘的形式:s µν1=α0c x 0βc y1f 0000f 0001R t 0T1X Y Z1=f x 0c x 00f yc y 001Rt 0T1X Y Z1将矩阵K 称为相机的内参数,K =f x0c x 0f yc y 001其中,α,β表⽰图像上单位距离上像素的个数,则f x =αf ,f y =βf 将相机的焦距f 变换为在x,y ⽅向上像素度量表⽰。
另外,为了不失⼀般性,可以在相机的内参矩阵上添加⼀个扭曲参数γ,该参数⽤来表⽰像素坐标系两个坐标轴的扭曲。
则内参数K 变为K =f xγc x 0f yc y 01对于⼤多数标准相机来说,可将扭曲参数γ设为0. Multiple View Geometry in Computer Vision张⽒标定法在上⼀篇博⽂,介绍的单应矩阵表⽰两个平⾯间的映射。
《焦点访谈》疑莱芜个别部门刁难讨薪者
《焦点访谈》疑莱芜个别部门刁难讨薪者时间:2013-12-14 作者:《焦点访谈》点击量: 300 编辑:来源:中央电视台央视网消息(焦点访谈):年底要到了,往年这个时候打工者能不能顺利拿到工资都会成为大家关注的热门话题。
这几年通过大家的共同努力情况有了很大改善,可有些地方还有死角,还会传来大家不愿意听到的消息。
张正友的老家是在陕西安康的农村,2011年,张正友带着村里的70多人,在山东莱芜为一家私人铁矿耿公清矿干挖矿石的工作。
本来与矿上签订的合同是按照矿石的产量定时结算工钱,一开始合同执行的还算顺利。
可是不知怎么回事,离2012年春节还有四、五个月的时候,矿上停止给他们发工钱了,欠薪的总额将近200万元。
煤矿工人在井下挖一年矿石,工资也就四、五万元,每人欠薪一、两万元对农民出身的矿工们不是个小数目。
欠债还钱,这是天经地义的事情,然而,这欠的200万元左右薪水钱就是要不回来。
对拖欠的工钱,老板推三阻四一直不给,直到过了老板许诺的期限,不仅钱没拿到,人也找不到了。
张正友和工友们听说莱芜市劳动监察大队可以解决打工者的欠薪问题,就找到莱芜市劳动监察部门。
可工作人员说,劳动部门不管工程,老板不给清算,得找建委。
张正友按照劳动部门要求找到莱芜市建委,而建委的工作人员告诉他们,建设部门是盖楼的,铁矿属于劳动部门,他们应该去找劳动部门。
张正友无奈之下找到莱芜市信访部门。
信访部门把镇书记电话号码给了他们。
镇里书记的电话还的确打通了,但对方却说他们打错电话了。
找政府主管部门投诉钱还是没要回来。
今年春节过后,矿上找了另外一批矿工来接替他们。
工钱没有结算清楚,张正友和工友们拒绝离开矿山。
没想到他们的被褥从房间里扔了出去。
就这样,双方发生了冲突,于是,张正友和几个工友因为打架斗殴,被镇里的派出所拘留了。
虽然被拘留,张正友还是惦记着70多名工人的200多万元薪水。
在拘留所,他给煤矿老板齐二丑打通了电话,老板齐二丑告诉他,这样闹一分钱都拿不到,也别想(从拘留所)顺利出来。
张正友标定法
K2
f
z
K矩阵被称为内参数
单应性映射
X u X Y K [ r r r t ] K [ r r t ]Y s v 1 2 3 1 2 0 1 1 1
单应性(homography): 在计算机视觉中被定义 为一个平面到另一个平面的 投影映射。
Harris角点检测
提取角点坐标
角点坐标检测算法的改进
I. II.
手动框选标定板的四个顶点; 在四边形内根据纵向和横向的方格 个数进行一次均匀分割,解算出初 始角点坐标;
III. 以初始角点为中心,框选出矩形区 域,再在矩形区域内进行Harris角 点检测。
标定实验及结果
标定实验
由于需要拍摄3张以上图像,如果在手机镜头上滴水, 水滴的滑动将影响摄像系统的内参,因此采用在手机 镜头前加一单透镜并保持两者相对位置不变,只改变 标定板的位置进行标定实验。
内外参数求解 令:
B11 B K T K 1 B21 B31 B12 B22 B32 B13 B23 B33
b [B11, B12 , B22 , B13 , B23 , B33 ]
化简
hiT Bhj VijT b
得:
Vij [hi1hj1, hi1hj 2 hi 2hj1, hi 2hj 2 , hi3hj1 hi1hj 3 , hi 3hj 2 hi 2hj 3 , hi 3hj 3 ]T
刚体变换
x=R X +T
x r00 y r 10 z r20 r01 r11 r21 r02 X Tx Y T r12 y r22 Z Tz
opencv 张正友标定法原理
opencv 张正友标定法原理
OpenCV张正友标定法原理
张正友标定法是计算机视觉领域中用于相机标定的一种常见方法。
其原理基于相机的内外参数模型,通过拍摄一系列已知位置的校准板图像,以推断相机的畸变参数和相机矩阵。
相机的内参数包括焦距、主点位置等,而外参数则指相机的姿态参数,比如旋转矩阵和平移向量。
相机畸变参数用于描述相机光学系统的非线性特性,例如径向畸变和切向畸变。
在进行张正友标定法时,首先需要准备一个校准板,通常采用黑白棋盘格。
校准板具有已知尺寸的特点,因此可以用来计算相机的内外参数。
在标定过程中,校准板被摆放在多个不同位置和姿态下,相机将拍摄一系列校准板图像。
对于每张图像,需要通过图像处理技术来检测校准板的角点,通常使用角点检测算法来实现。
检测到校准板的角点后,可以利用这些已知的图像点和校准板上的真实三维点之间的对应关系,进行相机的标定。
通过最小化重投影误差,即真实三维点和对应的图像点之间的距离,可以求解出相机的内参数和外参数。
张正友标定法的优势在于只需要使用一张校准板图像即可进行标定,而其他方法可能需要多张校准板图像。
同时,这种方法对于校准板的尺寸和姿态变化相对宽松,能够适应不同场景和标定需求。
总结而言,张正友标定法利用已知尺寸的校准板图像和相机拍摄的标定图像,通过计算相机的内外参数,实现相机的标定。
这种方法广泛应用于计算机视觉、机器人技术和增强现实等领域,为图像处理和计算机视觉算法的准确性提供了重要保证。
张氏标定法原理及其改进1
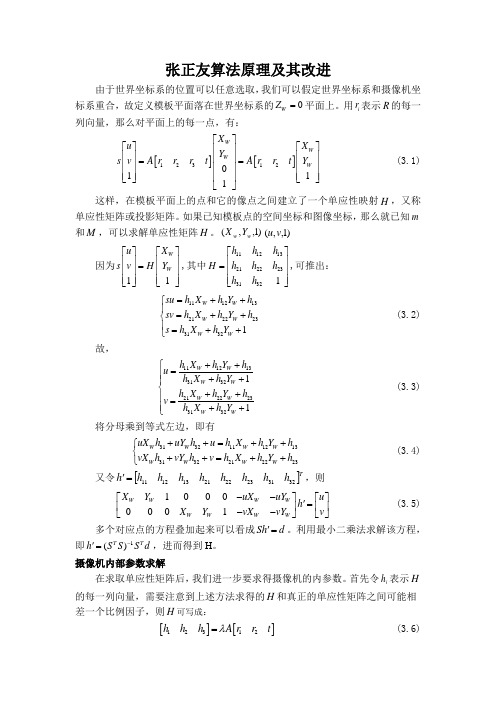
张正友算法原理及其改进由于世界坐标系的位置可以任意选取,我们可以假定世界坐标系和摄像机坐标系重合,故定义模板平面落在世界坐标系的0W Z =平面上。
用i r 表示R 的每一列向量,那么对平面上的每一点,有:[][]123120111W W W W X u X Y s v A r r r t A r r t Y ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦(3.1) 这样,在模板平面上的点和它的像点之间建立了一个单应性映射H ,又称单应性矩阵或投影矩阵。
如果已知模板点的空间坐标和图像坐标,那么就已知m 和M ,可以求解单应性矩阵H 。
)1,,(w w Y X )1,,(v u因为11W W u X s v H Y ⎡⎤⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦,其中11121321222331321h h h H h h h h h ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,可推出: 11121321222331321W W W W W W su h X h Y h sv h X h Y h s h X h Y =++⎧⎪=++⎨⎪=++⎩(3.2) 故,1112133132212223313211W W W W WW W W h X h Y h u h X h Y h X h Y h v h X h Y ++⎧=⎪++⎪⎨++⎪=⎪++⎩(3.3) 将分母乘到等式左边,即有31321112133132212223W W W W W W W W uX h uY h u h X h Y h vX h vY h v h X h Y h ++=++⎧⎨++=++⎩ (3.4)又令[]Th h h h h h h h h 3231232221131211=',则1000001W W W W WWWW X Y uX uY u h X Y vX vY v --⎡⎤⎡⎤'=⎢⎥⎢⎥--⎣⎦⎣⎦(3.5) 多个对应点的方程叠加起来可以看成Sh d '=。
知乎 张正友标定法

张正友标定法张正友标定法(Zhang's calibration method)是一种常用的相机标定方法,用于确定相机的内参数和畸变参数。
该方法由中国科学院计算技术研究所的研究员张正友于1999年提出,成为了相机标定领域的经典算法之一。
张正友标定法基于相机的针孔模型,将相机的内参数(如焦距、主点坐标、畸变参数等)以及相机与世界坐标系之间的外参数(如旋转矩阵和平移矩阵)进行标定。
它需要使用一组二维的模板图像和对应的三维真实世界坐标,通过计算模板图像上的特征点和真实世界坐标系中的对应特征点之间的关系,最终得到相机的内外参数。
具体而言,张正友标定法的步骤如下:1.收集标定图像:选取至少一个已知的二维模板图像,并准备一个与模板图像对应的三维真实世界坐标系。
2.提取特征点:对于每个标定图像,使用特征点检测算法(如角点检测)提取图像上的特征点。
3.特征匹配和三维-二维关联:通过将提取的特征点与真实世界坐标系中的对应特征点相关联,建立二维和三维特征点的对应关系。
4.相机参数计算:使用最小二乘法或其他优化算法,根据特征点的对应关系计算相机的内参数(如焦距、主点坐标等)和外参数(旋转矩阵和平移矩阵)。
该计算过程需要考虑相机的畸变参数(如径向和切向畸变)。
5.校正和评估:使用得到的相机内外参数对图像进行校正,通过观察校正结果和评估标定误差,可以对相机标定的准确性进行评估和调整。
张正友标定法通过利用多个标定图像和对应的真实世界坐标,能在一定程度上克服了噪声和畸变的影响,从而提高了相机标定的准确性和稳定性。
该方法广泛应用于计算机视觉、机器人导航等领域,为相机的精确几何校正提供了基础。
张正友标定方法

张正友标定方法
张正友标定方法是一种摄像机标定方法,旨在解决相机的畸变问题。
这种方法需要使用一个标定板,标定板上会有一些黑白相间的方格,通过对这些方格进行检测,可以得到相机的内参和外参矩阵。
在使用张正友标定方法时,需要考虑以下几个步骤:
1. 准备标定板。
标定板需要具有一定的尺寸和规则的黑白方格,以便于相机可以对其进行识别。
同时,标定板需要保持平整,以避免影响标定结果。
2. 拍摄标定板。
将标定板放在相机的拍摄范围内,采用不同的角度和距离进行多次拍摄。
需要注意的是,每次拍摄时标定板的位置和角度应该尽量保持一致。
3. 提取标定板角点。
通过对拍摄到的标定板图像进行处理,提取出标定板上的黑白方格的角点位置。
可以使用OpenCV等图像处理库进行实现。
4. 计算内参矩阵。
根据张正友的理论,通过角点的位置计算相机的内参矩阵。
内参矩阵包括相机的焦距、畸变等参数。
5. 计算外参矩阵。
根据标定板在相机坐标系下的位置和方向,计算相机的外参矩阵。
外参矩阵包括相机位置和方向等参数。
通过以上步骤,就可以得到相机的内参和外参矩阵,从而实现对相机的畸变进行校正。
张正友标定方法是一种比较成熟的相机标定方法,在计算精度和实现难度上都有较好的表现。
- 1 -。
开创我国数学史上微积分学研究先声的是谁

开创我国数学史上微积分学研究先声的是谁
“张正友”——筑基微积分学发源者
张正友,字素友,北宋武昌(今湖北武汉)人,祖籍中山(今广东韶关),元末明初数学家、科学家,汉文科学史上有着重要地位的人物。
张正友于元末明初,是当时武昌华西书院的学士,精行科学,特别是数
学大家。
他在文字编撰方面笔艺流畅,方法洗练而且笔墨细腻,且形成了自
己的特殊文体。
张正友取法“七书八集”,建立起一种以数目标定量衡定空
间之间的张量联系。
他系统地提炼出平面上的二位几何,又创立了“新学”。
张正友着有《筑基书》和《新学说》,是开创我国数学史上微积分学研
究的先声人物,筑基书和新学说极大谨慎考察封建技术数学中的若干问题,
他的科学精神可以说让我国的数学现代化。
后世学者认为,张正友的研究成果在汉文科学史上是非常重要的,他的
发现纠正、改正了历代数学史上众多异端,提供了解释存在问题的新方法,
实现了加强和发展中国传统数学的梦想。
张正友的成就对于汉文科学史具有重要意义,他遵循自然法则把断定空
间关系的微积分推向极致,被许多学者誉为“数学反封建学者”。
他提出的“新学”,也加强了东西方数学的交流,为后人做出了贡献。
张正友试图改革数学,一直立志要推动汉文数学的发展,他建立了自己
的特殊文体,改革方法,改革概念,创造出无穷的计算的可能性,是近代
数学的先驱者和开拓者。
张氏标定法在技术上的价值和地位

张氏标定法,也被称为张正友标定法,是由张正友博士在1999年提出的一种相机标定方法。
该方法在技术上具有很高的价值和地位,主要体现在以下几个方面:
实用性和灵活性:张氏标定法采用平面棋盘格作为标定物,相对于传统的三维标定物,更加易于制作和使用。
同时,该方法只需要从多个角度拍摄棋盘格的照片,无需进行复杂的运动或精确的控制,因此具有很高的实用性和灵活性。
精度和鲁棒性:张氏标定法能够在不使用高精度三维标定物的情况下,实现高精度的相机标定。
同时,该方法对于标定物的位置和姿态的要求相对较低,因此具有较好的鲁棒性。
这些优点使得张氏标定法在工业界和学术界得到了广泛的应用。
推动三维计算机视觉的发展:张氏标定法的提出,极大地促进了三维计算机视觉从实验室走向真实世界的进程。
在此之前,由于标定方法的限制,三维计算机视觉技术的应用主要局限于实验室环境。
而张氏标定法的出现,使得该技术能够在更广泛的场景中得到应用,推动了三维计算机视觉的发展。
综上所述,张氏标定法在技术上具有很高的价值和地位,为相机标定技术的发展做出了重要的贡献。
张正友相机标定法

• mˆ A, Ri , ti , M j 的求解是一个经典的非线性优化的问题,使评价函数最小的A,Ri,ti就是
这个问题的最优解。可以取第一次得到的线性求解结果作为A、 Ri , ti i 1 n 的初始值,解决
这类问题的方法很多 ,在计算机视觉领域里通常使用Levenberg-Marquarat算法进行求解。
h11 h12 h13
假设
H A r1
r2
t [h1
h2
h3 ] h21
h22
h23
h31 h32 1
sm~ HM~
su sv
h11 X h21 X
h12Y h22Y
h13 h23
s h31 X h32 1
vuXXhh3311
uYh32 vYh32
u h11X v h21X
y
sinsincos源自z cos sin cos
1
0
cos sin sin sin sin cos cos cos sin sin sin cos
0
sin sin cos cos cos
0
x0 x'
y0
y'
z0 1
z'
1
R r1 r2 r3
T (t1, t2 , t3 )T
h12Y h22Y
h13 h23
令 h' h11 h12 h13 h21 h22 h23 h31 h32 1
X
0
Y 0
1 0
0 X
0 Y
0 1
uX vX
uY vY
u vh'
0
3 闭合形解
B11 B12 B13
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
原文地址:OPENCV版本的摄像机标定(张正友)作者:蝈蝈摄像机的标定问题是机器视觉领域的入门问题,可以分为传统的摄像机定标方法和摄像机自定标方法。
定标的方法有很多中常见的有:Tsai(传统)和张正友(介于传统和自定标)等,摄像机成像模型和四个坐标系(通用原理)。
摄像机模型采用经典的小孔模型,如图中Oc(光心),像面π表示的是视野平面,其到光心的距离为f(镜头焦距)。
四个坐标系分别为:世界坐标系(Ow),摄像机坐标系(Oc),图像物理坐标系(O1,单位mm),图像像素坐标系(O,位于视野平面的左上角,单位pix)。
空间某点P到其像点p的坐标转换过程主要是通过这四套坐标系的三次转换实现的,首先将世界坐标系进行平移和转换得到摄像机坐标系,然后根据三角几何变换得到图像物理坐标系,最后根据像素和公制单位的比率得到图像像素坐标系。
(实际的应用过程是这个的逆过程,即由像素长度获知实际的长度)。
ps:通过摄像头的标定,可以得到视野平面上的mm/pix分辨率,对于视野平面以外的物体还是需要通过坐标转换得到视野平面上。
转化的过程和公式参见:摄像机标定原理(关键是三个坐标系).ppt2 张正友算法的原理zhang法通过对一定标板在不同方向多次(三次以上)完整拍照,不需要知道定标板的运动方式。
直接获得相机的内参(参考文献上矩阵A)和畸变系数。
该标定方法精度高于自定标法,且不需要高精度的定位仪器。
ZHANG的算法包含两个模型:一.经典针孔模型,包含四个坐标系,二畸变模型(这个来源未知)公式三项依次表示,径向畸变,切线畸变,薄棱镜畸变。
OPENCV中函数只能给出k1,k2,p1,p2。
还存在另外一种畸变模型,见《摄像机标定算法库的设计和试验验证》一文26 page。
(也不知道出处)ps:单从公式推导的过程来看,第一组公式等号右边应该是U0。
Key:这个方程怎么求?x,y 代表理想的图像坐标(mm),是未知数(不太可能是已知数,xike说的是不考虑畸变的投影值,这个就太简单了)。
************************************************************************************* #include "cvut.h"#include <iostream>#include <fstream>#include <string>using namespace cvut;using namespace std;void main() {ifstream fin("calibdata.txt");ofstream fout("caliberation_result.txt");cout<<"开始提取角点………………";int image_count=0;CvSize image_size;CvSize board_size = cvSize(5,7);CvPoint2D32f * image_points_buf = new CvPoint2D32f[board_size.width*board_size.height];Seq<CvPoint2D32f> image_points_seq;string filename;while (std::getline(fin,filename)){cout<<"n 将鼠标焦点移到标定图像所在窗口并输入回车进行下一幅图像的角点提取n";image_count++;int count;Image<uchar> view(filename);if (image_count == 1){image_size.width = view.size().width;image_size.height = view.size().height;}if (0 == cvFindChessboardCorners( view.cvimage, board_size,image_points_buf, &count, CV_CALIB_CB_ADAPTIVE_THRESH )){cout<<"can not find chessboard corners!n";exit(1);}else {Image<uchar> view_gray(view.size(),8,1);rgb2gray(view,view_gray);cvFindCornerSubPix( view_gray.cvimage, image_points_buf, count, cvSize(11,11),cvSize(-1,-1), cvTermCriteria( CV_TERMCRIT_EPS+CV_TERMCRIT_ITER, 30, 0.1 )); image_points_seq.push_back(image_points_buf,count);cvDrawChessboardCorners( view.cvimage, board_size, image_points_buf, count, 1); view.show("calib");cvWaitKey();view.close();}}delete []image_points_buf;cout<<"角点提取完成!n"<<endl;cout<<"开始定标………………"<<"n"<<endl;CvSize square_size = cvSize(10,10);Matrix<double> object_points(1,board_size.width*board_size.height*image_count,3); Matrix<double> image_points(1,image_points_seq.cvseq->total,2);Matrix<int> point_counts(1,image_count,1);Matrix<double> intrinsic_matrix(3,3,1);Matrix<double> distortion_coeffs(1,4,1);Matrix<double> rotation_vectors(1,image_count,3);Matrix<double> translation_vectors(1,image_count,3);int i,j,t;for (t=0;t<image_count;t++) {for (i=0;i<board_size.height;i++) {for (j=0;j<board_size.width;j++) {object_points(0,t*board_size.height*board_size.width + i*board_size.width + j,0) = i*square_size.width; object_points(0,t*board_size.height*board_size.width + i*board_size.width + j,1) = j*square_size.height; object_points(0,t*board_size.height*board_size.width + i*board_size.width + j,2) = 0;}}}char str[10];itoa(image_points_seq.cvseq->total,str,10);cout<<str<<"n"<<endl;for (i=0;i<image_points_seq.cvseq->total;i++){image_points(0,i,0) = image_points_seq[i].x;image_points(0,i,1) = image_points_seq[i].y;}for (i=0;i<image_count;i++)point_counts(0,i) = board_size.width*board_size.height;cvCalibrateCamera2(object_points.cvmat,image_points.cvmat,point_counts.cvmat,image_size,intrinsic_matrix.cvmat,distortion_coeffs.cvmat,rotation_vectors.cvmat,translation_vectors.cvmat,0);cout<<"定标完成!n";cout<<"标定结果显示n";cout<<"*************************************************n";cout<<"相机内参intrinsic_matrixn";for(int h=0;h<3;h++){cout<<"X:"<<intrinsic_matrix(h,0,0)<<"tY:"<<intrinsic_matrix(h,1,0)<<"tZ:"<<intrinsic_matrix(h,2,0)< <"n";}cout<<"n畸变系数:distortion_coeffsn";for(int ndis=0;ndis<4;ndis++){cout<<distortion_coeffs(0,ndis,0)<<"\";}cout<<"n";cout<<"nrotation_vectorsn";for(int rot=0;rot<7;rot++){cout<<"X:"<<rotation_vectors(0,rot,0)<<"tY:"<<rotation_vectors(0,rot,1)<<"tZ:"<<rotation_vectors(0,rot, 2)<<"n";}cout<<"ntranslation_vectorsn";for(i=0;i<7;i++){cout<<"第"<<i+1<<"张图"<<"tX:"<<translation_vectors(0,i,0)<<"tY:"<<translation_vectors(0,i,1)<<"tZ:"<<translation_vectors(0,i,2) <<"n";}cout<<"***************************************************n";cout<<"开始评价定标结果………………n";double total_err = 0.0;double err = 0.0;Matrix<double> image_points2(1,point_counts(0,0,0),2);int temp_num = point_counts(0,0,0);cout<<"t每幅图像的定标误差:n";fout<<"每幅图像的定标误差:n";for (i=0;i<image_count;i++){cvProjectPoints2(object_points.get_cols(i * point_counts(0,0,0),(i+1)*point_counts(0,0,0)-1).cvmat,rotation_vectors.get_col(i).cvmat,translation_vectors.get_col(i).cvmat,intrinsic_matrix.cvmat,distortion_coeffs.cvmat,image_points2.cvmat,0,0,0,0);err = cvNorm(image_points.get_cols(i*point_counts(0,0,0),(i+1)*point_counts(0,0,0)-1).cvmat,image_points2.cvmat,CV_L1);total_err += err/=point_counts(0,0,0);cout<<"******************************************************************n";cout<<"tt第"<<i+1<<"幅图像的平均误差:"<<err<<"像素"<<'n';fout<<"t第"<<i+1<<"幅图像的平均误差:"<<err<<"像素"<<'n';cout<<"显示image_point2n";for(int ih=0;ih<7;ih++){cout<<"X:"<<image_points2(0,ih,0)<<"tY:"<<image_points2(0,ih,1)<<"n";}cout<<"显示object_Pointsn";for(int iw=0;iw<7;iw++){cout<<"X:"<<image_points.get_cols(i*point_counts(0,0,0),(i+1)*point_counts(0,0,0)-1)(0,iw,0)<<"tY:"<<image_points.get_cols(i*point_counts(0,0,0),(i+1)*point_counts(0,0,0)-1)(0,iw,1)<<"n"; }}cout<<"t总体平均误差:"<<total_err/image_count<<"像素"<<'n';fout<<"总体平均误差:"<<total_err/image_count<<"像素"<<'n'<<'n'; cout<<"评价完成!n";cout<<"开始保存定标结果………………";Matrix<double> rotation_vector(3,1);Matrix<double> rotation_matrix(3,3);fout<<"相机内参数矩阵:n";fout<<intrinsic_matrix<<'n';fout<<"畸变系数:n";fout<<distortion_coeffs<<'n';for (i=0;i<image_count;i++) {fout<<"第"<<i+1<<"幅图像的旋转向量:n";fout<<rotation_vectors.get_col(i);for (j=0;j<3;j++) {rotation_vector(j,0,0) = rotation_vectors(0,i,j);}cvRodrigues2(rotation_vector.cvmat,rotation_matrix.cvmat);fout<<"第"<<i+1<<"幅图像的旋转矩阵:n";fout<<rotation_matrix;fout<<"第"<<i+1<<"幅图像的平移向量:n"; fout<<translation_vectors.get_col(i)<<'n'; }cout<<"完成保存n";}。