robcad安装过程
【ROBCAD学习】robcad_最基本的操作过程
最基本的操作过程
Robcad通常要创建两个文件夹,一个为Library;一个为Project。
Library一般存放固定的、不可更改的文件,比如:机器人,车型,测点,围栏,工装,水泥台等等。
Project一般存放的都是Library里的,在Robcad里可以被更改的文件。Project里的文件可以更改过后,再放回Library文件里当库文件。
注:两个文件夹(包括两个文件夹)下的所有文件名必须是英文,中文不识别。还有就是创建一个项目的时候最好是在Simulation文件夹下如:Simulation\jin\project或Simulation\jin\library。
以下是本行业使用Robcad的过程:
1:打开软件在Robcad界面下,点击Setup,弹出Setup窗口→点击Project→Define→在Project name:填写项目名称→在Path:项目所在的Project的路径→点击Accept确认。(这一步叫做“定义路径”)
→点击Set library root(创建库的根目录)→删掉Filter,selection两栏中的内容,在Directories栏中找到项目的
1
Library路径,点击Filter键并确认。
创建好之后,点击Configuration→Store→User Project (保存)。
2:在Robcad界面下,点击Project→找到项目名称并点击进入。弹出Layout窗口,点击Store as(另存) →在弹出窗口里填写另存名(这个时候Project文件下会出现-另存名的文件夹)。
ROBCAD_初级培训
汽车行业应用最为广泛的几个模块做简单介绍:
1、Workcell: ROBCAD 可以按照2D LAYOUT图精确的布置生产设施,并实现在三维的环境下直观 的进行生产仿真,以及工艺验证,同时对生产资源进行方便的管理和编排。 从而,减少布局规划的工作量,减少布局-工艺-工装之间不必要的重复工作,提早的发现 布局中的错误,优化布局,缩短设备安装时间,降低投资成本;通过3D仿真和生产验 证,能够及时发现空间静态干涉及动态干涉情况,为保证生产节拍,提高工作效率提供了 有力的保障。
Robcad training course Create by Si Mao
汽车行业应用最为广泛的几个模块做简单介绍:
2、Modeling: ROBCAD的Modeling 功能模块体现了数字化样机的便捷性,Modeling不仅可以方便我 们绘制出复杂的曲面模型,还可以绘制出机器人,四连杆工装等等复杂的运动机构体,并 精确仿真结构运动过程。 在概念设计阶段,使用ROBCAD Modeling模块我们可以轻松的建立生产设备资源三维 模型,帮助我们更快捷,更直观的完成生产线布局,验证和规划,加快布局规划的速度。
Robcad能够在由产品和多类制造资源所构成的环境中,进行机器人工作单元验证和自动化制造过程的 设计、仿真、优化、分析和离线编程。它提供的并行的工程平台,能用于优化焊接工艺过程并计算焊 装节拍时间。利用Robcad,你能够在三维图形计算机工作站上设计和模拟完整的焊装单元和系统。通 过允许制造工程师在前期虚拟地验证自动化制造方法和手段,Robcad使制造商能够无瑕疵地引进自动 化过程。作为一个标准的大规模的解决软件,ROBCAD能够充分集成主要的工艺,通过一套强大的过 程特定应用,覆盖范围广,包括点焊、弧焊、激光焊和冲铆等。 ROBCAD软件的开发有着突出的优点:提高加工质量、精确度和效益;减少劳动力时间和过程工程主 导时间;极大提高程序的准确度和过程质量;优化开发和主要的投资;减少成本;加速了投入市场的 时间。
robcad学习手册、资料、讲解
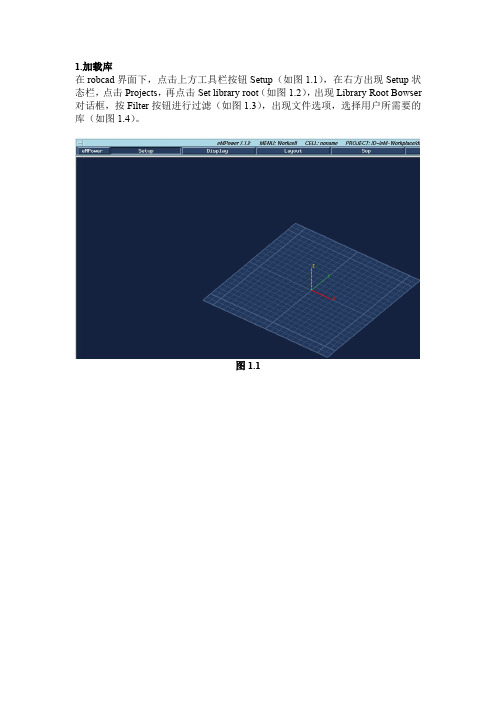
1.加载库
在robcad界面下,点击上方工具栏按钮Setup(如图1.1),在右方出现Setup状态栏,点击Projects,再点击Set library root(如图1.2),出现Library Root Bowser 对话框,按Filter按钮进行过滤(如图1.3),出现文件选项,选择用户所需要的库(如图1.4)。
图1.1
图1.2
图1.3
图1.4
2.加载车模
在robcad界面下,点击上方工具栏按钮eMpower,出现下拉菜单选择Workcell (如图2.1)或者点击工具栏中按钮Layout(如图2.2),在右方出现Layout状态栏,点击Load cell(如图2.3),出现Load Cell对话框,选择用户所需要的车模(如图2.4)。
注:有时Cells框中无选项出现,按Thumbnails。。。,出现选择对话框,选择用户所需要的车模(如图2.5)。
图2.1
图2.2
图2.3
.
图2.4
图2.5
3.在画面中加入机器人
在robcad界面下,点击上方工具栏按钮Layout(如图3.1),在右方出现Layou 状态栏,点击Get component(如图3.2),出现Get Component对话框,选择Libraries,选择用户所需要的机器人,Locate At:选择机器人位置,Instance Name:输入机器人名字(如图3.3)。点击Locate At后的Position,出现Position对话框,点击Values,输入机器人所在位置的数据(如图3.4)。
图3.1
图3.2
Robcad导入组件和装配
装配成功!
来自百度文库
关于组件的装配方法: 1.Mount,一般用于焊枪的粘结,工具带有自主运动性。而且此命令是坐标系对坐 标系的直接粘结,工具会自动准确装上.
2.Attach,通过移动组件到指定位置,建立和主体的连接关系的命令。 分one way,单向粘结,主随关系,组件随主体运动。 two way,双向粘结,对等关系,一齐双向运动。 3.Group,这个命令其实不算做装配,只是把组件移动到指定位置,然后编成一整 个模块移动。
以Attach为例装配一组管线。
导入所需组件
通过XYZ移动把管线移动到目标位置。
在layout菜单里,选择Attach。弹出右边对话框。选鼠标点击要装配的组件(可多选), 然后把光标移动到Attach to:的选项,再用鼠标点击机器人任何位置,自动填充机器人 名字。按Accept确认操作,组件装配上。
导入组件和装配
首先定义project和library文件夹
然后导入机器人
导入组件
点击get component,弹出左边窗口。 找出所要导入的组件文件,可在预览窗口查看。 按ok导入。
定义导入成功后,并用Placement调整位置
右键鼠标点击Display all,显示所有坐标,后面用到。
点击后下角的 motion按钮, 弹出右边窗口。
首先定义project和library文件夹
【新提醒】Robcad软件安装教程winxp、win7、win8系统都可以安装
【新提醒】Robcad软件安装教程winxp、win7、win8系统都可以安装
第⼀步: 下载 Robcad软件压缩包,解压压缩包。如果电脑有安装过旧版本的需要完整卸装后重
新启动电脑才能进⾏新的软件安装。【安装前要关闭360等杀毒软件】
第⼆步: 运⾏安装软件中的RunMe.exe,点击Install Robcad 9.0进⾏安装,安装过程出现的选择
请点击“NEXT”进⾏下⼀步;
第三步: Robcad 软件破解
1. 复制Crack\bin\lm⽂件夹下⾯的roblms.exe,替换到“C:\Robcad\bin\lm”下⾯
2. 复制Crack\dat⽂件夹下⾯的“.robcad”⽂件到“C:\Users”下⾯(中⽂系统显⽰“C:\⽤户”)
Robcad_教程
Robcad V9.0
北京迪基透科技有限公司
2015/10/20
9
目录
载入资源
Layout Get component:在Layout模块下打开Get component命令,在弹出的
对话框中选择要加载的资源。
当前project 路径下资源
当前library 路径下资源
此处可 选加载 位置
此处可命名 新名称
Robcad V9.0
北京迪基透科技有限公司
2015/10/20
19
目录
资源布局
Put: ① 需要移动的对象,根据选择的参考点沿直线方向移动,同时将移动过来的对象的
参考坐标系与参考坐标系保持一致。 ②需要移动的对象,根据选择的参考点沿直线方向移动,同时将移动过来的对象的 参考坐标保持不变。 参考坐标系
Robcad V9.0
北京迪基透科技有限公司
2015/10/20
5
目录
项目文件的创建 1. 项目结构: 通常由项目名称(由英文字母、下划线或数字组成)命名一个文件夹。项目文 件夹下一般分2个文件夹:project和library文件夹(文件夹名称大小写均可)。 一般仿真生产的ce文件会自动保存在project文件夹下;各种资源数模一般都存 放在library文件夹下。 2. 结构示意图:
Plant 工艺规划和厂房布局.etc
RoboCup3D人形仿真新手指南(server安装及代码编译)
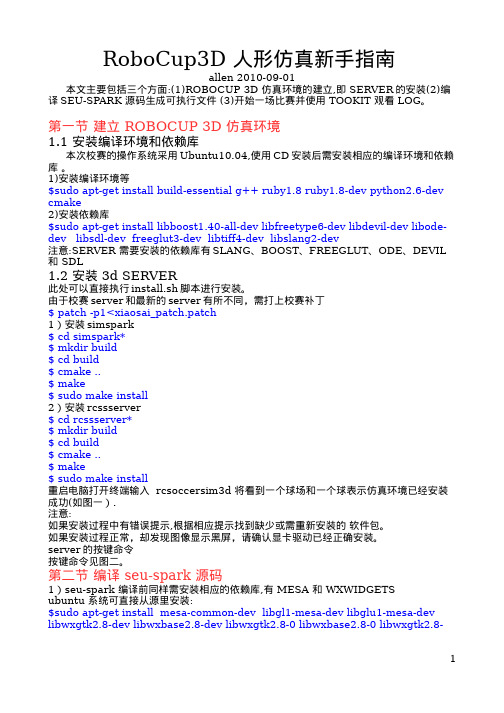
RoboCup3D 人形仿真新手指南
allen 2010-09-01
本文主要包括三个方面:(1)ROBOCUP 3D 仿真环境的建立,即SERVER的安装(2)编译SEU-SPARK 源码生成可执行文件(3)开始一场比赛并使用TOOKIT 观看LOG。
第一节建立ROBOCUP 3D 仿真环境
1.1 安装编译环境和依赖库
本次校赛的操作系统采用Ubuntu10.04,使用CD安装后需安装相应的编译环境和依赖库。
1)安装编译环境等
$sudo apt-get install build-essential g++ ruby1.8 ruby1.8-dev python2.6-dev cmake
2)安装依赖库
$sudo apt-get install libboost1.40-all-dev libfreetype6-dev libdevil-dev libode-dev libsdl-dev freeglut3-dev libtiff4-dev libslang2-dev
注意:SERVER 需要安装的依赖库有SLANG、BOOST、FREEGLUT、ODE、DEVIL 和SDL
1.2 安装3d SERVER
此处可以直接执行install.sh脚本进行安装。
由于校赛server和最新的server有所不同,需打上校赛补丁
$ patch -p1<xiaosai_patch.patch
1)安装simspark
$ cd simspark*
$ mkdir build
$ cd build
$ cmake ..
Robcad 9.0安装教程
安装准备
0.安装过程中,需要注意,第一,在自己设定安装路径时,不能出现空格,中划线,或者中文字样,并且不允许电脑插着U盘或者移动硬盘,电脑配置较低,建议不安装本软件,安装前关闭各种防护软件。整个过程在30分钟以上,请安心等待。
1.首先对电脑进行简单设置。
2.桌面右击选择个性化,后选择Windows7 Basic
3.打开用户账户选择“用户账户控制设置”(图2),进入账户设置(图3),选择从不通知。重启电脑设置才能生效。
下面进入安装过程
1.打开ROBCAD_9.0,选择Runme应用程序,
双击打开,出现图示画面,点击Install Robcad9.0进入安装界面。
安装过程中,一直点击NXET,直至程序安装完成,直到安装成功,出现下图画面,选择不立刻重启,然后选择“Finish”,退出Runme 安装程序。
2.选择安装文件夹ROBCAD_9.0.1r_PC并打开,选择文件ROBCAD_9.0.1r_PC文件夹打开后选择Robcad901r文件,双击打开安装等待,中途出现“下一步”则点击“下一步”。
安装完成后出现下图,点击“finish”等待计算机重启。
3.开机后出现图,选择ok
4.进入安装程序ROBCAD_9.0,选择bin文件夹中的roblms文件并复制,粘贴至文件安装位置C:\Robcad\bin\lm,(此路径为默认安装路径,如果安装文件位置变化,需要自己做出调整)。
5.进入安装程序ROBCAD_9.0,选择usr文件夹中.robcad并复制,粘贴至C:\Robcad\usr,(同样的不是默认的安装路径时,自己
【ROBCAD学习】库卡机器人payload的安装于使用方法
3,energy supply 添加 负载类型 (抓手或焊枪
)。
4.点击OK -----------OK 详见截图
1. Load analysis 会出现 分析表格
2. static 静态分析 dynamic 动态分析
3. info 分析说明 4. 3 Payload diagram
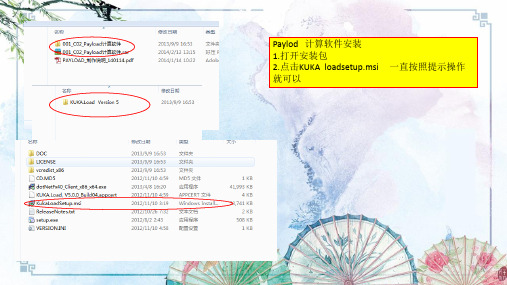
Paylod 计算软件安装 1.打开安装包 2.点击KUKA loadsetup.msi 就可以
一直按照提示操作
1.打开payload计算界面 2,选择机器人 3,选择add tool data 把
焊枪的或者抓手的数值输 进去,(注Fra Baidu bibliotek单位)
详见截图
1. Add individual 添加一 行。
模拟图像
5. 详见截图 6.
六轴的负载方 向
1.Set all nominal 设置默认值 2,axis 1,2,3 一二三轴信息 3. A6 是6 轴的信息
添加负载
本节内容结束
roboguide安装教程
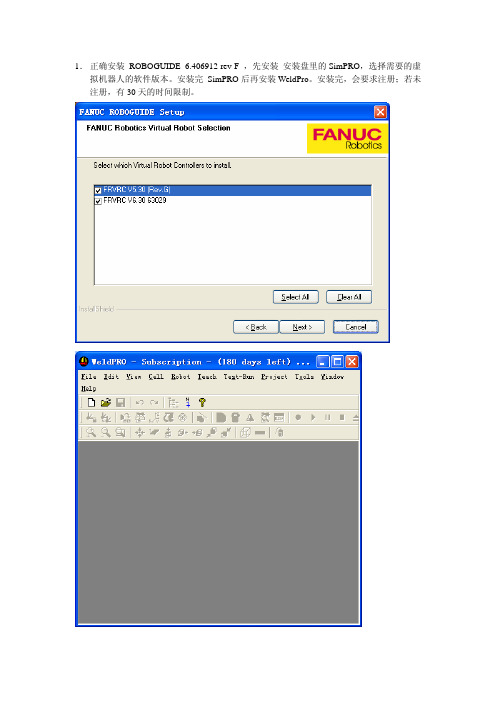
1.正确安装 ROBOGUIDE_6.406912 rev F ,先安装安装盘里的SimPRO,选择需要的虚拟机器人的软件版本。安装完 SimPRO后再安装WeldPro。安装完,会要求注册;若未注册,有30天的时间限制。
2.新建Workcell
在Name 一栏输入文件名,文件名要以字母开头。
第一项是根据默认的配置新建;第二项是根据上次使用的配置新建;第三项是根据机器人备份文件来创建;第四项是根据已有机器人的拷贝来新建;一般都选用第一项。
选择机器人的软件版本:V6.** 是针对R-J3iB 控制器,V7.**是应用在R-J3iC控制器的。现在销售的机器人都是R-J3iC控制器的。
选择机器人的应用软件:一般选用ArcTool ( H541 )
选择合适的机型,如果选型错误,造成焊接位置达不到,可以在创建之后更改。
然后选择Group2 ~7的设备:该实例中选了两个Positioners ,如果没有类似设备,就无需在此页上做任何选择。
根据所需,选择相应的选项功能软件。以下列出一些弧焊中常用的选项功能:
1A05B-2500-H871 ARC Positioner FANUC二轴变位机
1A05B-2500-J511 TAST Arc Sensor
1A05B-2500-J518 Extended Axis Control 行走轴
1A05B-2500-J526 AVC 弧压控制
1A05B-2500-J536 Touch Sensing 接触传感
1A05B-2500-J605 Multi Robot Control 多机器人控制,Dual Arm中用1A05B-2500-J601 Multi-Group Motion 多组控制,有变位机,必须选1A05B-2500-J617 Multi Equipment 多设备,Tamdem Mig中用
robcad安装教程
1.安装Robcad8.0文件包中的Exceed和Exceed3D。
2.接着安装MKS,如果电脑是32位的,选择文件中的SETUP安装。如果电脑是64位的,
选择SETUP64安装。
3.安装Robcad8.0
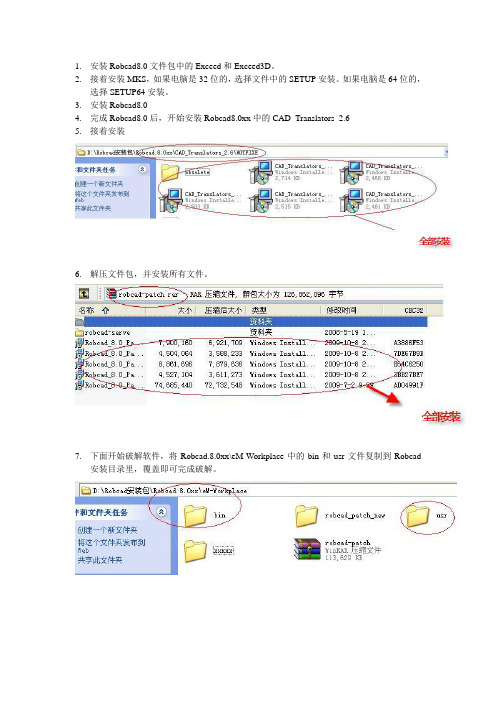
4.完成Robcad8.0后,开始安装Robcad8.0xx中的CAD_Translators_2.6
5.接着安装
6.解压文件包,并安装所有文件。
7.下面开始破解软件,将Robcad.8.0xx\eM-Workplace中的bin和usr文件复制到Robcad
安装目录里,覆盖即可完成破解。
8.安装完成。
安装方面二:1.用虚拟光驱打开
2.按照安装界面安装Robcad
3.然后按照第一种安装方法,安装CAD_Translators_2.6
4.破解方法重复第一种安装方法。
ROBCAD基础知识
ROBCAD基础知识
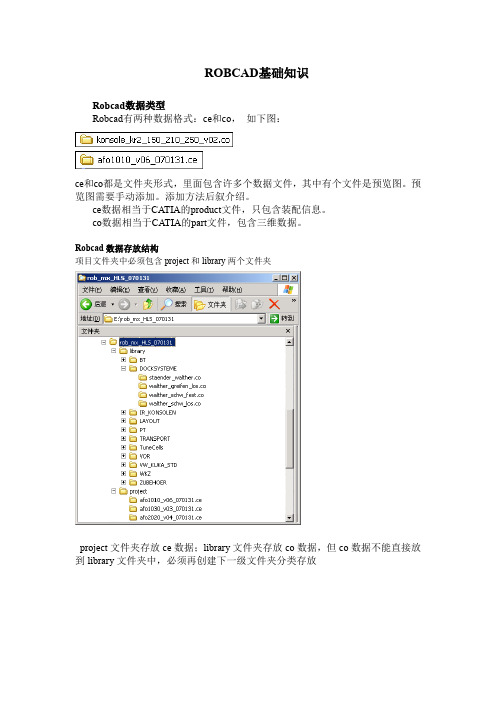
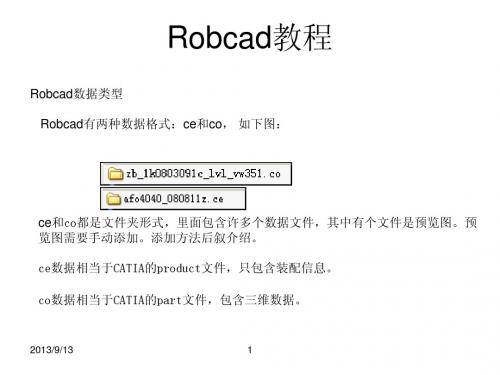
Robcad数据类型
Robcad有两种数据格式:ce和co,如下图:
ce和co都是文件夹形式,里面包含许多个数据文件,其中有个文件是预览图。预览图需要手动添加。添加方法后叙介绍。
ce数据相当于CATIA的product文件,只包含装配信息。
co数据相当于CATIA的part文件,包含三维数据。
Robcad数据存放结构
项目文件夹中必须包含project和library两个文件夹
project文件夹存放ce数据;library文件夹存放co数据,但co数据不能直接放到library文件夹中,必须再创建下一级文件夹分类存放
设置工作路径
设置工作路径有两种方式:临时设置、永久设置。 临时设置:(每次使用时都要重新设置一遍)
1.设置project 路径:点屏幕左上角的Robcad ◊ 点Project 选项。
2.点。
3.双击“..”返回上级目录, “.”是当前文件夹(没用)。找到要模拟的项目文件夹,双击第三张图的project 文件夹,点OK 。
4.设置library 路径:按下图提示操作。
点屏幕左上方的Setup ◊ 点屏幕右侧Projects ◊ 点Set library root ◊ 如果第四步窗口中没有内容,点一下Filter ,再双击选择library 文件夹 ◊ OK 完成。
1
2
4
3
5
永久设置:
1.点屏幕右侧Projects ◊点下面的Define ◊
“Project name:”项填入项目名称;
“Path:”项填入project文件夹的完整路径。路径格式为:“/E=/asdf/zxcv/project”技巧:填Path项时,可以先复制好路径,回到Define窗口,左键点一下Path右边空白处,使黑色三角箭头指向该项,再用中键点一下此处,就可以把路径粘贴上去。
roboguide安装教程
1.正确安装 ROBOGUIDE_6.406912 rev F ,先安装安装盘里的SimPRO,选择需要的虚拟机器人的软件版本。安装完 SimPRO后再安装WeldPro。安装完,会要求注册;若未注册,有30天的时间限制。
2.新建Workcell
在Name 一栏输入文件名,文件名要以字母开头。
第一项是根据默认的配置新建;第二项是根据上次使用的配置新建;第三项是根据机器人备份文件来创建;第四项是根据已有机器人的拷贝来新建;一般都选用第一项。
选择机器人的软件版本:V6.** 是针对R-J3iB 控制器,V7.**是应用在R-J3iC控制器的。现在销售的机器人都是R-J3iC控制器的。
选择机器人的应用软件:一般选用ArcTool ( H541 )
选择合适的机型,如果选型错误,造成焊接位置达不到,可以在创建之后更改。
然后选择Group2 ~7的设备:该实例中选了两个Positioners ,如果没有类似设备,就无需在此页上做任何选择。
根据所需,选择相应的选项功能软件。以下列出一些弧焊中常用的选项功能:
1A05B-2500-H871 ARC Positioner FANUC二轴变位机
1A05B-2500-J511 TAST Arc Sensor
1A05B-2500-J518 Extended Axis Control 行走轴
1A05B-2500-J526 AVC 弧压控制
1A05B-2500-J536 Touch Sensing 接触传感
1A05B-2500-J605 Multi Robot Control 多机器人控制,Dual Arm中用1A05B-2500-J601 Multi-Group Motion 多组控制,有变位机,必须选1A05B-2500-J617 Multi Equipment 多设备,Tamdem Mig中用
ROBCAD教程
Table of Contents
Chapter 1. Introduction to eM-Workplace
1.1Basics of Robcad operation 1.2View Control in e-M Workplace 1.3Entity and component concept
Chapter 2. Modeling
2.1 Setup World
2.2 Display tool 2.3 Files
2.4 Modeling Basics
2.5 Opening and editing of direct models in rob cad
Chapter 3. Fundamentals of Kinematics
3.1 Assigning Kinematics 3.2 Creating Devices
3.3 Reading the States Command 3.4 Data
Chapter 4. Processing
4.1 Creation of Library and project,4.2 Project and library setting.
4.3 Placement of Robots and tools ( Work cell buildup)4.4 Tool V alidation (Static Collision)4.5 Auto place
Chapter 5. Paths generations
5.1 Creation of locations
5.2 Robot path Creation. (Path editor)5.3 Attribute Assignment 5.4 Robot motions setting 5.5 Tcp setting
RDCADS_TV1.1安装说明
RDCADS_T V1.1安装说明
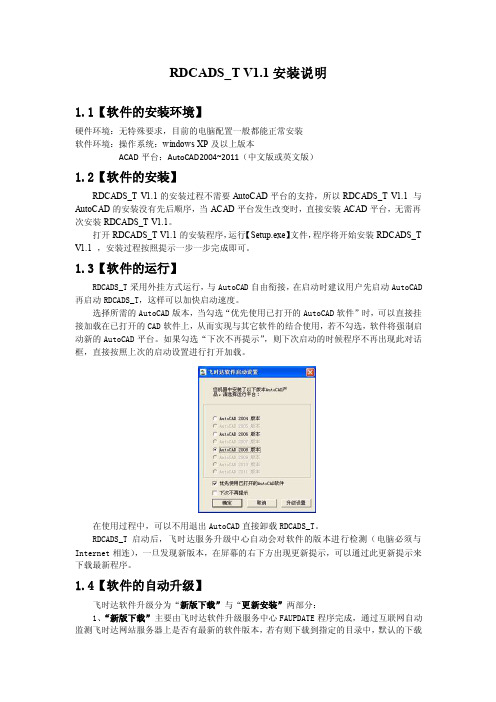
1.1【软件的安装环境】
硬件环境:无特殊要求,目前的电脑配置一般都能正常安装
软件环境:操作系统:windows XP及以上版本
ACAD平台:AutoCAD2004~2011(中文版或英文版)
1.2【软件的安装】
RDCADS_T V1.1的安装过程不需要AutoCAD平台的支持,所以RDCADS_T V1.1 与AutoCAD的安装没有先后顺序,当ACAD平台发生改变时,直接安装ACAD平台,无需再次安装RDCADS_T V1.1。
打开RDCADS_T V1.1的安装程序,运行【Setup.exe】文件,程序将开始安装RDCADS_T V1.1 ,安装过程按照提示一步一步完成即可。
1.3【软件的运行】
RDCADS_T采用外挂方式运行,与AutoCAD自由衔接,在启动时建议用户先启动AutoCAD 再启动RDCADS_T,这样可以加快启动速度。
选择所需的AutoCAD版本,当勾选“优先使用已打开的AutoCAD软件”时,可以直接挂接加载在已打开的CAD软件上,从而实现与其它软件的结合使用,若不勾选,软件将强制启动新的AutoCAD平台。如果勾选“下次不再提示”,则下次启动的时候程序不再出现此对话框,直接按照上次的启动设置进行打开加载。
在使用过程中,可以不用退出AutoCAD直接卸载RDCADS_T。
RDCADS_T启动后,飞时达服务升级中心自动会对软件的版本进行检测(电脑必须与Internet相连),一旦发现新版本,在屏幕的右下方出现更新提示,可以通过此更新提示来下载最新程序。
Robcad
2 3
4
5 6 7
1
2013/9/13
9
Robcad教程
导入焊点:将工艺文件中的焊点数据复制到记事本文件中后将其扩展名名称更改成
pt文件.保存到project文件夹中. 开始导入焊点:点击①Robcad内的Spot.之后点击 ②wold_locs,再点击③Import,选择所要的焊点文件④后,再选择车模⑤,最后accept确 认.
设置工作路径
1.设置project路径:点屏幕左上角的① Setup后点屏幕右侧② Projects .. 点下面的③Define后在④“Project name:”项填入项目名称;⑤“Path:” 项填入project文件夹的完整路径。
1
4 5 2
3
2013/9/13
3
Robcad教程
2.设置library路径:点屏幕左上角的① Setup后点屏幕右侧② Projects .. 点
2013/9/13
1
Robcad教程
Robcad数据存放结构 项目文件夹中必须包含project和library两个文件夹。
project文件夹存放ce数据;library文件夹存放co数据,但co数据不能直接放到 library文件夹中,必须再创建下一级文件夹分类存放。
2013/9/13 2
Robcad教程
角的 Robcad .. 点① Warking选项,再点击右侧② Get component选项,然后选择要 读入的③ co文件,点ok即可导入。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
安装准备
0.到此基本完场安装过程,安装过程中,需要注意,第一,在自己设定安装路径时,不能出现空格,中划线,或者中文字样,并且不允许电脑插着U盘或者移动硬盘,电脑配置较低,建议不安装本软件,安装前关闭各种防护软件。整个过程在30分钟以上,请安心等待。
1.首先对电脑进行简单设置。
2.桌面右击选择个性化,后选择Windows7 Basic,关闭,见图1
图1
3.打开用户账户选择“用户账户控制设置”(图2),进入账户设置(图3),选择从不通知
图2 图3
下面进入安装过程
1.打开ROBCAD_9.0,选择Runme应用程序,双击打开,出现图1画面,
图1
2.选择箭头所指,等待程序安装,过程中出现“next”,选择“next”,直到安装成功出现图2画面,选择不立刻重启,然后选择“Finish”。
图2
3.选择安装文件夹ROBCAD_9.0.1r_PC并打开,选择文件ROBCAD_9.0.1r_PC文件夹打开后选择Robcad901r文件,双击打开安装等待,中途出现“下一步”则点击“下一步”。安装完成后出现图3,点击“finish”等待计算机重启。
图3
4.开机后出现图4,选择ok
图4
5.进入安装程序ROBCAD_9.0,选择bin文件夹中的roblms文件并复制,粘贴至文件安装位置C:\Robcad\bin\lm,(此路径为默认安装路径,如果安装文件位置变化,需要自己做出调整)。
6.进入安装程序ROBCAD_9.0,选择bin文件夹中.robcad并复制,粘贴至C:\Robcad\usr,(同样的不是默认的安装路径时,自己做出调整),到此基本完场安装过程,安装过程中。