汽车自适应巡航系统激光雷达扫描平面定位
adas功能标准

adas功能标准
ADAS,即高级驾驶辅助系统,是一种利用传感器、算法和人工智能技术,为驾驶者提供安全驾驶辅助的汽车系统。
其功能主要包括以下几个方面:
1. 自适应巡航控制:通过雷达或摄像头检测车辆前方的道路情况,自动调整车速以保持与前车的安全距离。
2. 碰撞预警:通过激光雷达、摄像头或雷达等传感器监测车辆周围环境,当检测到可能发生碰撞的危险时,及时提醒驾驶者采取措施避免碰撞。
3. 车道偏离预警:利用摄像头检测道路线,当车辆无意识地偏离车道时,提醒驾驶者注意安全。
4. 自动泊车:通过摄像头、激光雷达等传感器,自动识别停车位并协助驾驶者完成泊车入位。
5. 夜视功能:通过红外线技术,增强夜间驾驶的视野,提高驾驶安全。
这些功能可以增强驾驶的安全性和舒适度。
但需要注意的是,这些功能并不是万能的,它们只能在特定的条件下提供辅助,不能替代人的判断和决策。
因此,在使用这些功能时,仍需保持警觉并时刻注意路况。
汽车智能驾驶系统的基本工作原理

汽车智能驾驶系统的基本工作原理汽车智能驾驶系统的基本工作原理随着科技的不断进步,汽车行业也不断迎来新的变革。
其中,智能驾驶系统的出现被视为一个革命性的发展,可以帮助基础负载减轻驾驶负担,提高行车安全性和车辆实用性。
本文将介绍汽车智能驾驶系统的基本工作原理。
一、传感器系统汽车智能驾驶系统的最重要的部分是传感器系统。
该系统包括了各式各样的传感器,它们能够捕捉真实世界中车辆周围的所有信息。
这些传感器可以分类为以下几种:1. 激光雷达:激光雷达是一种高度精准的激光测距仪,能够通过发射激光束并检测其反射回来的时间来计算出前方物体的距离和方向。
2. 摄像头:摄像头是一种高清晰度的摄像设备,可以捕捉车辆行驶过程中的视频信息,其中包括道路、车灯、标志和其他车辆。
3. 雷达:雷达是一种使用电磁波测距的装置,可以非常快速地检测出车辆周围的目标物体并测量它们与车的距离。
二、处理器传感器系统肯定会产生大量的数据和信息。
这些数据需要经过处理器进行处理,以便让系统了解车辆周围的情况。
处理器将从传感器获得的信息进行整合,并利用先进的算法将它们转化为图像和地图。
这些地图和图像将是自动驾驶车辆行驶过程中必不可少的。
三、车辆控制模块车辆控制模块是智能驾驶系统的最后一环节。
当得到足够的信息后,车辆控制模块将对车辆的动力系统、车轮转向和刹车系统进行调整。
这使得车辆能够正确地避让、制动和加速。
四、非实时交互车辆需要与周围的其他车辆、行人和其他交通设施进行交互。
这种交互可以是双向或单向的。
如果是双向的交互,车辆将能够与其他车辆进行通信,并获得它们的动态。
如果是单向的交互,车辆可以接收一个指令或一个警告,从而改变其行驶方向。
总之,智能驾驶系统的基本工作原理是通过传感器捕捉车辆周围的信息,然后利用处理器将信息处理和转换成地图和图像,最后通过车辆控制模块对车辆进行控制。
还要注意的是,汽车智能驾驶系统的应用需要满足许多法规、法律和安全标准,以确保其行驶安全、可信度和强大性。
汽车自适应巡航系统激光雷达扫描平面定位

( ain l a oao yo t efr n e& E s o etB in n tueo eh oo y B in 0 0 1 C ia N t a b rtr f o L AuoP roma c mi inT s, e igIs tt fT c nlg , e ig1 08 , hn ) s j i j
Abs r c t a t: The p po e a h ini c n e o re t to o c n ng p a e o h a o oie da tv c u s ur s nd t e sg f a c f o in ai n t s a ni l n ft e utm t a键词 :汽车 自适应 巡航 控制 ;激光雷达 ;扫描平面 ; 定位 中图分类号 :U 9 . 4 16 文献标识码 :A 文章 编号 :10 -9 8 ( 0 8 0 -0 1 -0 00 7720 )2 09 2
Ore t to o s a ni g pl ne o ut m o i e ACC a a in a in t c n n a fa o tv rd r
汽 车 自适 应 巡 航 系统 激 光 雷 达 扫 描 平 面 定 位
何 玮 ,刘 昭度 ,王 斌 ,张 彪
( 北京理工大 学 汽车动力性及 排放测试 国家专 业实验室 , 北京 10 8 ) 0 0 1
摘
要 :基于扫描式激 光雷达的基本原 理和 自适应 巡航控 制 ( C ) A C 系统 的工作 要求 , 出了对激 光 雷达 指
扫 描平 面进行定位 的 目的和意义 。通 过对 2个点 目标 和楔形 块斜面 进行扫 描测量 , 确定 了激光 雷达扫 描 透镜 即激光探头在光 学保 护罩 内的深 度和激光扫描平 面的高度 , 进行 了补充 实验对测量结果 加以验证 , 并 证 明测量误差在 1 m以内 , 确定 激光雷达在 汽车上 的理想安 装位置 , 小系统误差 , c 为 减 避免 A C系统 发生 C
《车载激光雷达检测方法》

《车载激光雷达检测方法》车载激光雷达是一种基于激光技术的检测设备,能够通过激光束的反射来获取目标物体的位置信息。
它主要应用于自动驾驶系统中,用于实时检测道路上的障碍物,从而保证行车安全。
本文将介绍车载激光雷达检测的方法和技术。
首先,激光雷达通过发射激光束,并测量激光束从发射到接收所需的时间,从而计算出目标物体距离激光雷达的距离。
这个过程叫做时间测距。
激光雷达还会记录激光束的反射强度,从而得到目标物体的反射特性,例如反射率、表面颜色等。
还能记录激光束的角度信息,从而计算出目标物体的角度位置。
这个过程叫做角度测量。
通过时间测距和角度测量,激光雷达能够获得目标物体的三维位置信息。
在进行激光雷达检测时,一般会采用扫描方式来获取目标物体的位置信息。
扫描方式分为水平扫描和垂直扫描两种。
水平扫描是指激光雷达固定方向旋转,通过不同角度的扫描,获取目标物体的水平位置信息。
垂直扫描是指激光雷达在水平方向上固定位置,通过改变垂直方向的角度,获取目标物体的垂直位置信息。
通过水平和垂直两个方向的扫描,激光雷达能够获取目标物体的二维位置信息。
在进行激光雷达检测时,还需要进行数据处理和滤波。
由于激光雷达在检测过程中会受到多种因素的影响,例如光照条件、大气湍流等,其测量数据会存在一定的误差。
因此,需要对激光雷达获取的原始数据进行滤波和处理,以提高检测的准确性和稳定性。
常用的处理方法包括:去除离群点、噪声滤波、数据平滑处理等。
这些处理方法可以有效地去除噪声和异常点,从而提高激光雷达检测的精度和稳定性。
此外,车载激光雷达还可以结合其他传感器进行检测。
例如,可以与摄像头、毫米波雷达等其他传感器进行数据融合,从而获得更全面和准确的目标检测结果。
数据融合可以通过将不同传感器的数据进行叠加和整合,从而弥补各个传感器之间的局限性,提高检测的准确性和可靠性。
综上所述,车载激光雷达检测方法包括激光束的发射和接收、时间测距和角度测量、水平和垂直扫描等步骤。
acc工作原理

acc工作原理
ACC (自适应巡航控制) 是一种车辆安全辅助系统,通过使用
雷达、激光和摄像头等传感器技术,实现智能巡航控制。
相比于常规的巡航控制系统,ACC 可以根据前方行驶车辆的速度
和车间距离,自动调整车辆的加速和减速,以保持安全距离。
ACC 的工作原理是通过车载传感器实时监测前方车辆的行驶
速度和距离。
当车辆开启 ACC 功能后,系统会持续地扫描前方,并根据检测到的数据来控制汽车的速度。
如果前方有车辆驶近,ACC 会通过自动减速来保持安全距离。
当前方车辆加
速或离开后,ACC 会自动适应并加速到预设的巡航速度。
ACC 的传感器通常包括长距离雷达和摄像头。
雷达用于测量
前方车辆的速度和距离,而摄像头则可以辨别行驶车辆的类型和行为。
这些传感器通过实时传输数据给车辆的电脑系统,系统根据这些数据来决定是否需要调整车辆的速度。
ACC 的优点是可以大大减少驾驶员的疲劳和压力,提高乘坐
舒适度和安全性。
当交通拥堵时,ACC 可以自动控制车辆的
速度和车间距离,减少频繁的加速和减速,从而提高交通流畅度。
然而,驾驶员仍然需要保持警惕,随时准备接管车辆控制,因为 ACC 并不能取代驾驶员的责任和判断力。
总之,ACC 利用传感器技术来监测前方车辆的速度和距离,
通过自动调整车辆速度来保持安全距离。
这项技术可以提高驾驶的便利性和安全性,但驾驶员仍然需要保持警惕并随时准备接管控制。
车载激光雷达原理

车载激光雷达原理车载激光雷达是一种用于车辆自动驾驶系统中的传感器技术,它可以通过发射激光束来探测周围环境,从而实现对车辆周围环境的三维感知和定位。
本文将详细介绍车载激光雷达的原理。
一、激光雷达简介激光雷达是一种利用激光束进行测量和探测的传感器技术。
它可以通过发射高频率的激光束来探测周围环境,从而实现对目标物体的距离、速度、方向等参数的测量。
在汽车自动驾驶系统中,激光雷达被广泛应用于对车辆周围环境的感知和定位。
它可以精确地检测出道路上的障碍物、行人、其他车辆等,并提供高精度的位置信息,为车辆自主导航提供重要支持。
二、车载激光雷达原理1. 激光束发射车载激光雷达首先需要发射一束高频率的激光束。
这个过程通常由一个或多个半导体二极管激光器完成。
激光器将电能转换为激光束,并通过透镜或其他聚焦装置将激光束聚焦成一个非常小的点,然后发射出去。
2. 激光束探测当激光束发射后,它会在空气中传播,并与周围环境中的物体相互作用。
当激光束遇到物体时,它会被反射回来,返回到激光雷达的接收器中。
3. 接收器接收车载激光雷达的接收器通常由一个或多个探测器组成。
当反射回来的激光束进入接收器时,它会被探测器检测到,并转换为电信号。
4. 信号处理接收到的电信号需要进行一系列处理才能得到有用的信息。
首先,需要对信号进行放大和滤波以消除噪声。
然后,需要对信号进行数字化处理,并使用算法对其进行解码和分析。
5. 数据输出最终,车载激光雷达将输出一组数据,包括目标物体的距离、速度、方向等参数。
这些数据可以被汽车自动驾驶系统用来实现对周围环境的感知和定位。
三、车载激光雷达的工作原理车载激光雷达的工作原理可以简单地概括为:发射一束高频率的激光束,探测周围环境中的物体,将反射回来的激光束转换为电信号,并进行信号处理和数据输出。
具体来说,车载激光雷达会通过发射一束高频率、窄束宽度的激光束来扫描周围环境。
这个过程通常由一个或多个旋转镜片完成。
旋转镜片会以非常高的速度旋转,将激光束扫描到不同方向,并探测周围环境中的物体。
《智能网联汽车概论》练习答案
《智能网联汽车概论》练习答案第1章智能网联汽车基础知识练习参考答案一、名词解释1.智能汽车答:智能汽车是在一般汽车上增加雷达和摄像头等先进传感器、控制器、执行器等装置,通过车载环境感知系统和息终端实现与车、路、人等的息交换,使车辆具备智能环境感知能力,能够自动分析车辆行驶的安全及危险状态,并使车辆按照人的意愿到达目的地,最终实现替代人来操作的目的。
2.网联汽车答:网联汽车是指基于通互联建立车与车之间的连接,车与网络中心和智能交通系统等服务中心的连接,甚至是车与住宅、办公室以及一些公共基础设施的连接,也就是可以实现车内网络与车外网络之间的息交互,全面解决人—车—外部环境之间的息交流问题。
3.智能网联汽车答:智能网联汽车是指搭载先进的车载传感器、控制器、执行器等装置,并融合现代通与网络技术,实现车与X(车、路、行人、云端等)智能息交换、共享,具备复杂环境感知、智能决策、协同控制等功能,可实现车辆“安全、高效、舒适、节能”行驶,并最终可实现替代人来操作的新一代汽车。
4.自动驾驶汽车答:自动驾驶汽车是指汽车至少在某些具有关键安全性的控制功能方面(如转向、油门或制动)不必驾驶员直接操作即可自动完成控制动作的车辆。
自动驾驶汽车一般使用车载传感器、GPS和其他通装备获得息,针对安全状况进行决策计划,在某种程度上得当地实施控制。
5.无人驾驶汽车无人驾驶汽车是通过车载情况感知体系感晓得路情况,自动计划和辨认行车门路并控制车辆到达预定方针的智能汽车。
它是利用情况感知体系来感知车辆周围情况,并根据感知所获得的道路状况、车辆位置和障碍物息等,控制车辆的行驶偏向和速度,从而使车辆能够安全、可靠地在道路上行驶。
二、填空题1.智能网联汽车发展的终极目标是无人驾驶汽车。
2.自动驾驶汽车至少包括自适应巡航控制体系、车道坚持辅助体系、自动制动辅助体系、自动泊车辅助体系,比力高级的车型还应该装备交通拥堵辅助体系。
3.我国把智能网联汽车智能化划分为5个等级,1级为驾驶辅助(DA),2级为部分自动驾驶(PA),3级为有条件自动驾驶(CA),4级为高度自动驾驶(HA),5级为完全自动驾驶(FA)。
自适应巡航控制系统的工作原理
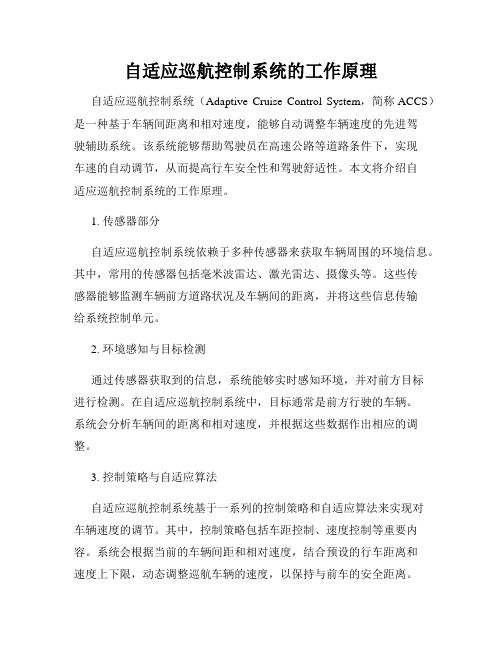
自适应巡航控制系统的工作原理自适应巡航控制系统(Adaptive Cruise Control System,简称ACCS)是一种基于车辆间距离和相对速度,能够自动调整车辆速度的先进驾驶辅助系统。
该系统能够帮助驾驶员在高速公路等道路条件下,实现车速的自动调节,从而提高行车安全性和驾驶舒适性。
本文将介绍自适应巡航控制系统的工作原理。
1. 传感器部分自适应巡航控制系统依赖于多种传感器来获取车辆周围的环境信息。
其中,常用的传感器包括毫米波雷达、激光雷达、摄像头等。
这些传感器能够监测车辆前方道路状况及车辆间的距离,并将这些信息传输给系统控制单元。
2. 环境感知与目标检测通过传感器获取到的信息,系统能够实时感知环境,并对前方目标进行检测。
在自适应巡航控制系统中,目标通常是前方行驶的车辆。
系统会分析车辆间的距离和相对速度,并根据这些数据作出相应的调整。
3. 控制策略与自适应算法自适应巡航控制系统基于一系列的控制策略和自适应算法来实现对车辆速度的调节。
其中,控制策略包括车距控制、速度控制等重要内容。
系统会根据当前的车辆间距和相对速度,结合预设的行车距离和速度上下限,动态调整巡航车辆的速度,以保持与前车的安全距离。
4. 控制执行部分自适应巡航控制系统对车辆速度的调整是通过控制执行部分来实现的。
这部分通常包括发动机控制单元、变速器控制单元等。
当系统判断需要加速或减速时,它会通过控制执行部分发送指令,并调整车辆速度。
5. 可视化与人机交互为了方便驾驶者进行状态监测和实时调整,自适应巡航控制系统通常还配备了可视化界面。
驾驶者可以通过仪表盘上的显示屏或者车载信息娱乐系统来查看当前的巡航状态,并进行必要的人机交互操作。
总结:自适应巡航控制系统能够通过传感器获取环境信息,并利用控制策略和自适应算法来调节车辆速度,使其与前方车辆保持安全距离。
该系统在提高行车安全性的同时,也能够减轻驾驶者的驾驶负担,提升行车舒适性。
随着智能驾驶技术的不断进步,自适应巡航控制系统有望在未来得到更广泛的应用。
汽车最常见的五种主动安全技术

汽车最常见的五种主动安全技术
汽车行驶时的安全问题是司机和乘客最为关注的问题之一。
为了提高汽车行驶安全性能,汽车制造商采用了许多主动安全技术。
以下是汽车最常见的五种主动安全技术:
1. 车道偏离预警系统:该系统使用摄像头或激光雷达等设备,监测车辆行驶的车道位置,并在车辆偏离车道时发出警报。
2. 自适应巡航控制系统:该系统通过雷达或激光雷达等设备监测前方车辆的速度和距离,并自动调整车速和保持距离,以保证安全行驶。
3. 倒车影像系统:该系统通过后视摄像头显示车辆后方的图像,提供更好的倒车视野,避免碰撞或撞击其他障碍物。
4. 自动刹车系统:该系统通过雷达或激光雷达等设备监测前方车辆或障碍物的距离,并在危险情况下自动刹车,以避免碰撞或事故。
5. 盲点监测系统:该系统通过雷达或摄像头等设备监测车辆两侧的盲点区域,并在检测到其他车辆或障碍物时发出警报,提醒司机注意安全。
这些主动安全技术不仅可以提高汽车行驶的安全性能,同时也提高了驾驶的舒适性和便捷性。
但需要注意的是,这些技术并不能完全替代驾驶员的注意力和驾驶技能,驾驶员仍需保持警觉,时刻注意交通安全。
- 1 -。
自适应巡航控制系统ACC

施工区域等,使ACC提前做出应对措施。
人工智能和机器学习
自主学习和优化
通过机器学习算法,ACC能够根据驾驶员的 驾驶习惯和习惯进行自主学习和优化,提高 驾驶舒适性和安全性。
预测性控制
利用人工智能技术,ACC能够预测道路上的变化和 障碍物移动轨迹,提前调整车速和距离,提高行驶 稳定性。
人机协同驾驶
通过人工智能技术,ACC能够与驾驶员进行 自然语言交互,辅助驾驶员进行决策和控制 ,提高驾驶安全性。
自适应巡航控制系统acc
目 录
• 引言 • ACC的工作原理 • ACC的应用场景和优势 • ACC的未来发展 • 结论
01 引言
目的和背景
目的
自适应巡航控制系统(ACC)的目 的是提高驾驶安全性,减轻驾驶负 担,并提高道路交通效率。
背景
随着传感器技术和控制理论的不 断发展,ACC系统逐渐成为现代 汽车的重要辅助驾驶系统之一。
未来研究和开发的方向
进一步优化控制算法
随着人工智能和传感器技术的发展,未来自适应巡航控制 系统将更加智能化和自主化,需要进一步优化控制算法以 实现更精确和可靠的控制。
集成其他驾驶辅助系统
未来自适应巡航控制系统将更加集成化,与车道保持、自 动泊车等其他驾驶辅助系统相互协作,共同为驾驶员提供 更加全面和智能的驾驶支持。
横摆力矩控制
根据车辆的运动状态和驾驶员的转向输入,动态控制系统计算出合适的横摆力矩,以控制车辆的横摆运动和转向 动态。
03 ACC的应用场景和优势
高速公路驾驶
高速公路驾驶是自适应巡航控制系统(ACC)最常应用的场景 之一。在高速公路上,ACC能够自动调整车辆速度,保持与前 车的安全距离,减轻驾驶者的负担,提高驾驶安全性。
ADAS八大系统介绍

ADAS八大系统介绍自动驾驶辅助系统(ADAS)是一种结合了车辆感知、决策和控制等技术,可以提高驾驶安全和舒适性的先进驾驶辅助系统。
ADAS系统可以为驾驶员提供各种信息和警示,帮助他们及时做出正确的决策,并且在一定情况下还可以代替驾驶员进行部分或全部驾驶任务。
随着汽车技术的不断进步,ADAS系统已经成为现代汽车上的标配,为驾驶员提供更安全、便捷的驾驶体验。
ADAS系统一般包括以下八大系统:1.自适应巡航控制系统(ACC):ACC系统是一种可以根据前方车辆的速度自动调整车辆速度的系统,可以在高速公路上帮助驾驶员保持适当的车距,提高行车安全性和舒适性。
ACC系统通常会使用激光雷达、摄像头等传感器来感知前方车辆,自动控制车速和距离。
2.自动紧急制动系统(AEB):AEB系统是一种能够在发现可能发生碰撞时自动刹车的系统,可以有效减少碰撞事故的发生。
AEB系统通过激光雷达、摄像头等传感器感知前方障碍物,当认为有碰撞危险时会发出警告并自动刹车,避免碰撞发生。
3.车道偏离警示系统(LDW):LDW系统可以监测车辆是否在车道内行驶,当车辆偏离车道时会发出警告。
LDW系统通常会使用摄像头或传感器感知车辆的位置和方向,及时警示驾驶员注意车辆行驶方向。
4.盲点监测系统(BSM):BSM系统可以监测车辆两侧的盲区,当有其他车辆靠近时会发出警告。
BSM系统通常会使用雷达或摄像头等传感器感知车辆周围的情况,帮助驾驶员避免盲区事故的发生。
5.交通标志识别系统(TSR):TSR系统可以识别交通标志,包括限速标志、禁止标志等,提醒驾驶员注意并遵守交通规则。
TSR系统通常会使用摄像头或传感器感知交通标志,显示在仪表盘或车载屏幕上。
6.车道保持辅助系统(LKA):LKA系统可以通过操控方向盘,自动帮助驾驶员保持在车道内行驶,减少驾驶疲劳和提高行车安全性。
LKA系统通常会使用摄像头或传感器感知车辆的位置和方向,自动纠正车辆行驶轨迹。
7.自动停车辅助系统(APA):APA系统可以通过操控方向盘、油门和刹车,自动帮助车辆完成停车过程,包括垂直停车和并线停车。
列举自动驾驶汽车传感器的应用

列举自动驾驶汽车传感器的应用随着科技的不断发展,自动驾驶汽车已经成为现实。
自动驾驶汽车依靠各种传感器来感知周围环境,并作出相应的决策和控制。
下面将列举自动驾驶汽车传感器的应用。
1. 激光雷达传感器(LIDAR)激光雷达传感器通过发射激光束并测量其反射时间来感知周围环境。
它可以提供高精度的三维地图,帮助车辆识别和跟踪其他车辆、行人、障碍物等,并测量它们的距离和速度。
2. 摄像头传感器摄像头传感器是自动驾驶汽车中最常见的传感器之一。
它们可以捕捉实时视频图像,帮助车辆识别和分析周围环境。
通过计算机视觉算法,车辆可以检测道路标志、交通信号灯、行人、车辆等,并做出相应的决策。
3. 雷达传感器雷达传感器利用电磁波来感知周围环境。
它们可以提供车辆周围物体的位置和速度信息,帮助车辆避免碰撞和保持安全距离。
雷达传感器在恶劣天气条件下也能够正常工作,使自动驾驶汽车具备良好的适应性。
4. 超声波传感器超声波传感器通过发射超声波脉冲并测量其回应时间来感知周围环境。
它们可以用于测量距离,帮助车辆检测和避免与其他车辆、行人、障碍物等的碰撞。
超声波传感器通常用于低速行驶和近距离感知。
5. 惯性测量单元(IMU)惯性测量单元是一种集成了加速度计和陀螺仪的传感器组合。
它可以测量车辆的加速度、角速度和方向,帮助车辆确定自身的姿态和位置。
IMU传感器对于辅助其他传感器提供更精确的定位和导航信息具有重要作用。
6. GPS传感器GPS传感器通过接收全球定位系统(GPS)卫星信号来确定车辆的位置和速度。
它可以提供高精度的地理定位信息,帮助车辆进行导航和路径规划。
GPS传感器通常与其他传感器结合使用,提供更准确的定位和导航能力。
7. 气象传感器气象传感器用于感知和监测周围的气象条件,如温度、湿度、气压等。
这些信息对于自动驾驶汽车的决策和控制至关重要。
例如,在下雨或雾天时,车辆可以根据气象传感器提供的信息调整行驶策略,确保行车安全。
8. 轮速传感器轮速传感器通过监测车轮的旋转速度来计算车辆的速度和加速度。
自适应巡航系统的工作原理

自适应巡航系统的工作原理
自适应巡航系统是一种在汽车上的辅助驾驶系统,它通过感知车辆的速度和周围的车辆情况,自动调整车辆的巡航速度和跟车距离,以提供更安全和舒适的行驶体验。
其工作原理如下:
1. 车速感知:自适应巡航系统通过车辆上的传感器或雷达感知车辆的速度,确保控制系统了解当前的行驶速度。
2. 前方障碍物检测:自适应巡航系统使用雷达、摄像头或激光器等感知设备,监测车辆前方是否有其他车辆或障碍物。
3. 距离控制:根据车速和前方障碍物的距离,自适应巡航系统计算出安全的跟车距离,并将车辆维持在该距离范围内。
4. 速度调整:当车辆前方的车速变化时,自适应巡航系统会自动调整车辆的速度,以保持安全的跟车距离。
5. 加速和减速:当前方的障碍物离车辆过近或速度变慢时,自适应巡航系统会自动减速或停车,以避免碰撞。
6. 车道保持:一些自适应巡航系统还可以检测车辆在车道内的位置,并通过调整方向盘或车辆的动力输出来保持车辆在正确的车道内行驶。
总的来说,自适应巡航系统通过感知、监测和调整车辆速度和跟车距离,以提供更舒适、安全的行驶体验,并为驾驶员减轻驾驶压力。
智能驾驶辅助系统的纵向控制技术及原理

智能驾驶辅助系统的纵向控制技术及原理随着科技的不断发展和智能化的飞速进步,智能驾驶系统正在成为汽车行业的热门话题。
其中,智能驾驶辅助系统的纵向控制技术在提高驾驶安全性和舒适性方面发挥着重要作用。
本文将从系统概述、原理、技术特点和发展趋势等方面对智能驾驶辅助系统的纵向控制技术进行详细讨论。
一、系统概述智能驾驶辅助系统是通过激光雷达、摄像头、超声波传感器等传感器实时感知车辆周围环境,并通过高精度地图和定位系统对车辆进行定位和环境感知,从而实现对车辆控制的智能化。
在纵向控制方面,智能驾驶辅助系统主要包括自适应巡航控制系统(ACC)、自动紧急制动系统(AEB)、智能巡航控制系统(ICCS)等。
二、纵向控制原理1. 自适应巡航控制系统原理自适应巡航控制系统基于车辆前方的雷达传感器对前车距离和速度进行实时测量,通过控制车辆的油门和刹车系统,使车辆能够在保持安全距离的基础上自动跟随前车行驶,从而减少驾驶员的疲劳程度,提高行车舒适性和安全性。
2. 自动紧急制动系统原理自动紧急制动系统主要通过前方的雷达传感器和摄像头实时监测前方道路情况,当系统检测到前方有阻碍物或其他车辆在急刹时,系统能够自动触发制动系统,以避免碰撞事故的发生,提高车辆行驶的安全性。
3. 智能巡航控制系统原理智能巡航控制系统是基于导航地图和车辆定位系统,通过对路线的实时监测和对车辆周围环境的感知,能够实现自动控制车辆的加减速,并能够根据道路情况、限速等信息进行自动调节,从而减轻驾驶员的驾驶负担,提高行车效率。
三、技术特点1. 高精度传感器:智能驾驶辅助系统采用了多种传感器,如激光雷达、摄像头、超声波传感器等,能够实时感知车辆周围环境,为纵向控制提供了精准的数据支持。
2. 数据融合与处理:系统通过对各种传感器采集到的数据进行融合和处理,能够实现更加准确的环境感知和车辆控制,提高了系统的可靠性。
3. 实时响应能力:智能驾驶辅助系统具有很强的实时响应能力,能够在毫秒级时间内做出反应,从而避免了许多交通事故的发生。
电动汽车自适应巡航控制技术研究

电动汽车自适应巡航控制技术研究自动驾驶技术的进步使得电动汽车的驾驶体验日益便捷和安全。
其中,自适应巡航控制技术(AdaptiveCruiseControl,ACC)在提高驾驶者的舒适度和安全性方面发挥着重要的作用。
本文将探讨电动汽车自适应巡航控制技术的研究现状和未来发展趋势。
1.自适应巡航控制技术简介自适应巡航控制技术是一种能够根据前方道路和车辆情况自动调整车速的汽车驾驶辅助系统。
通过激光雷达、摄像头和传感器等设备,ACC可以感知前方道路状况和其他车辆的位置信息,然后自动调整车速和跟车距离,保持安全驾驶。
这项技术在高速公路上特别有用,可以减轻驾驶者的压力,提高行驶的平稳性和安全性。
2.电动汽车自适应巡航控制技术的研究进展随着电动汽车市场的快速发展,研究者们开始关注如何将自适应巡航控制技术应用于电动汽车上。
相比于传统燃油车,电动汽车的动力系统和驾驶特性有所不同,因此需要针对电动汽车的特点进行相关研究。
电动汽车的能量回收系统可以与自适应巡航控制技术相结合,实现能量的最大化利用。
通过监测前方车辆的行驶状态和道路状况,ACC可以根据行驶需求合理调整电动汽车的能量回收和释放,提高能源利用效率,延长电池寿命。
电动汽车的驱动系统可以与自适应巡航控制技术进行集成,实现更智能化的驾驶。
通过与车辆导航系统和智能交通信号系统的联动,ACC可以根据交通流量和道路限速自动调整车速和跟车距离,提供更加平稳和高效的驾驶体验。
电动汽车的智能充电系统也可以与自适应巡航控制技术相结合,实现更加便捷的充电体验。
通过与充电站的实时通信,ACC可以根据电池的剩余电量和充电站的距离,智能规划充电路线和时间,提供更加高效和可靠的充电服务。
3.电动汽车自适应巡航控制技术的未来发展趋势随着智能交通和车联网技术的发展,电动汽车自适应巡航控制技术将迎来更加广阔的发展前景。
未来,ACC将不仅仅限于高速公路的使用,还可以应用于城市交通和非机动车道等场景,进一步提升电动汽车的驾驶安全性和舒适性。
汽车自动巡航系统的工作原理

汽车自动巡航系统的工作原理汽车自动巡航系统(ACC)是一种先进的驾驶辅助系统,它利用传感器、雷达和摄像头等技术,可以帮助驾驶员在高速公路上维持车辆的速度和距离,提供更加舒适和安全的驾驶体验。
本文将详细介绍汽车自动巡航系统的工作原理。
1. 传感器感知车辆周围环境汽车自动巡航系统依赖于多种传感器,以感知车辆周围的环境。
这些传感器通常包括雷达、激光测距仪和摄像头。
雷达可以探测到前方障碍物的距离和速度,激光测距仪可以提供更加准确的距离测量,而摄像头可以实时获取车道线和其他车辆的信息。
2. 目标检测和跟踪一旦传感器感知到了周围的环境,接下来就是目标检测和跟踪。
通过处理传感器获取的数据,系统可以识别出前方的车辆、行人和其他障碍物,并对它们进行跟踪。
通过持续地监测目标物体的位置、速度和加速度等信息,系统可以预测它们的未来行为。
3. 车辆控制在目标检测和跟踪的基础上,汽车自动巡航系统需要对车辆进行控制,以维持适当的速度和距离。
这通常是通过自动控制刹车和油门来实现的。
当系统检测到前方车辆减速或停止时,它会自动刹车以保持与前方车辆的距离。
相反,当前方车辆加速时,系统会自动加速以保持一定的车距。
4. 巡航模式选择除了自适应跟车巡航模式外,汽车自动巡航系统还提供了常规巡航模式。
在常规巡航模式下,驾驶员可以设定车辆的速度,并且系统会尽力保持该速度而不考虑前方车辆的行为。
这种模式适用于无拥堵状况下的高速公路驾驶。
5. 驾驶员干预尽管汽车自动巡航系统可以大大减轻驾驶员的驾驶负担,但驾驶员的干预仍然是必要的。
系统会监听驾驶员的操控,并在需要时发出警示,要求驾驶员重新接管控制权。
在某些情况下,如紧急情况或系统故障,驾驶员需要立即操作车辆以确保安全。
6. 其他功能汽车自动巡航系统通常还配备了其他功能,如车道保持辅助系统(LKA)和交通拥堵辅助系统。
车道保持辅助系统可以帮助驾驶员保持车辆在车道内的稳定,并提供警示和纠正措施,以防止意外偏离车道。
汽车中的自动化系统

汽车中的自动化系统自动化系统是现代汽车中的重要组成部份,它通过使用各种传感器、控制器和执行器来实现车辆的自动化操作和功能。
本文将详细介绍汽车中常见的自动化系统,并探讨其在提高驾驶安全性、提升驾驶体验和减少能源消耗方面的作用。
一、自动驾驶系统自动驾驶系统是汽车自动化领域的热门话题,它通过使用激光雷达、摄像头、雷达和超声波传感器等多种传感器来获取道路、车辆和环境信息,然后通过高级算法和控制器来实现车辆的自主导航和控制。
自动驾驶系统可以提高驾驶安全性,减少交通事故的发生,并为驾驶员提供更加舒适的驾驶体验。
二、自动刹车系统自动刹车系统是一种基于传感器和控制器的安全系统,它可以在紧急情况下自动刹车以避免碰撞。
当传感器检测到前方有障碍物或者与前车的距离过近时,自动刹车系统会向驾驶员发出警告并自动刹车。
这种系统可以极大地减少碰撞事故的风险,保护驾驶员和乘客的安全。
三、自动泊车系统自动泊车系统利用车载摄像头和超声波传感器等设备,通过计算机算法来辅助驾驶员完成泊车操作。
驾驶员只需控制方向盘和刹车,系统将自动控制车辆的加速、制动和转向,实现精确的泊车。
这种系统不仅提高了泊车的准确性,也减少了驾驶员的驾驶负担,提升了驾驶体验。
四、自适应巡航控制系统自适应巡航控制系统是一种基于雷达和摄像头等传感器的智能巡航控制系统。
它可以根据前方车辆的速度和距离,自动调节车辆的巡航速度和跟车距离。
当前方车辆减速或者停车时,系统会自动减速或者停车以保持安全距离。
这种系统可以减少驾驶员的疲劳,提高长途驾驶的舒适性和安全性。
五、自动灯光系统自动灯光系统利用车载摄像头和光敏传感器等设备,根据环境亮度和车辆行驶状态自动调节车辆的灯光。
当环境亮度较暗或者进入隧道时,系统会自动开启车辆的前照灯和尾灯。
当检测到来车或者前车时,系统会自动切换远光灯和近光灯。
这种系统可以提高夜间驾驶的安全性,减少驾驶员的操作负担。
六、自动空调系统自动空调系统是一种基于温度传感器和控制器的智能空调系统。
激光雷达在自动驾驶中的应用

激光雷达在自动驾驶中的应用自动驾驶是汽车领域的一个热门话题。
近年来,随着技术不断进步,越来越多的汽车公司开始研发自动驾驶技术,旨在提高驾驶的安全性和效率。
激光雷达是自动驾驶技术中的一个重要组成部分。
它是一种可以获取三维空间信息的传感器,可以测量周围环境和障碍物的距离和形状,为自动驾驶汽车提供必要的信息。
利用激光雷达获取数据,自动驾驶汽车可以实现多种功能,例如自动制动、自动转向、自动避障等。
下面我们将详细讨论激光雷达在自动驾驶中的应用。
1. 高精度地图制作在自动驾驶汽车上,激光雷达可以扫描周围环境,获取高精度的三维地图。
这些地图可以提供车辆当前位置和周围环境的详细信息,例如道路的限速标志和标线、障碍物等。
利用这些地图,自动驾驶汽车可以实现精确定位和路径规划。
这对于实现高级自动驾驶功能(如高速公路上的全自动驾驶)非常重要。
2. 预测行人和其他障碍物激光雷达还可以识别和预测行人和其他障碍物的位置和运动状态。
利用这些信息,自动驾驶汽车可以实现精确的避障和制动。
例如,当自动驾驶汽车检测到行人正在穿越马路时,它可以立即减速或甚至停车以避免碰撞。
3. 精确定位和控制激光雷达可以通过扫描周围环境,实现自动驾驶汽车的精确定位和控制。
利用激光雷达获取的三维地图和外部环境信息,自动驾驶汽车可以计算出它的真实位置和姿态,并实时调整控制参数,以保持在道路中心线上。
此外,激光雷达还可以提供精确的车辆速度和加速度信息,以便自动驾驶汽车实现更精确的控制。
4. 全时候可用性相较于其他传感器,激光雷达可以在几乎所有天气条件下工作,例如雨天、雾天、夜晚等。
这意味着自动驾驶汽车可以在各种环境下保持高度稳定和准确性。
此外,激光雷达还可以工作在较短的时间间隔内,以提供更高的精度。
这使得自动驾驶汽车可以更快地做出响应,进一步提高驾驶安全性。
总结激光雷达是自动驾驶技术中的关键组成部分。
它可以提供高精度的地图制作、行人和障碍物预测、精确定位和控制等功能,同时实现全时候使用和高精确度。
介绍高级驾驶辅助系统

介绍高级驾驶辅助系统近年来,随着汽车技术的不断进步和智能化程度的提高,高级驾驶辅助系统(safer driving assistance system)已经成为了现代汽车行业的一项关键技术。
该技术通过引入新型传感器、控制单元和执行器件等高级装备,能够为驾驶员提供诸如智能巡航、自动驾驶、避碰提醒、自动泊车等多项功能,从而大大提升了驾驶安全性和舒适性。
高级驾驶辅助系统具有多种形式和应用,下面我们将分别从智能巡航和自动驾驶两个方面进行介绍。
一、智能巡航智能巡航通常是基于雷达、摄像头、定位和辅助控制等技术,能够根据车辆前方的路面条件、自身速度和车流状况等因素,自动控制车辆行驶,以确保相对安全和有效的远程驾驶。
特别是在长距离的高速公路、高速环路和城市快速公路等路段上,智能巡航能够为驾驶员提供一种全新的驾驶体验。
现代汽车制造商在智能巡航系统中常使用的传感器包括车载摄像头、前向雷达、激光雷达和超声波传感器等。
这些传感器能够同时提供各种环境信息,使高级驾驶辅助系统能够对道路上前方的车辆、行人和障碍物进行及时感知和分析,从而为驾驶员提供正确的指导和建议。
二、自动驾驶随着自动驾驶技术的不断革新,自动化程度不断提高,已经逐渐走向了完全无人化驾驶领域。
自动驾驶系统通常包括多个传感器、多个控制节点和多个执行单元组成,在进行全自动驾驶操作的时候,能够依靠这些节点和单元自动完成车辆加减速、方向调整和避碰操作。
当前自动驾驶技术主要分为两个级别:部分自动驾驶(SAE Level2)和高级自动驾驶(SAE Level 3)。
部分自动驾驶技术支持车辆实现对前车的自适应巡航和自动换道等基本功能,但需要驾驶员控制方向盘和“灵敏度踏板”。
而高级自动驾驶技术则支持车辆实现自主通行,驾驶员只需要进行个别干预即可。
需要提醒一下的是,自动驾驶技术存在一定的风险和局限性,例如传感器误判、控制单元失灵和执行器件故障等因素都有可能导致车辆发生事故。
因此,在实现自动驾驶体验的同时,也需要加强技术的质量管控和风险管理措施的落地,来保障车辆和行人的安全。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2008年第27卷第2期 传感器与微系统(Transducer and M icr osyste m Technol ogies)研究与探讨汽车自适应巡航系统激光雷达扫描平面定位3何 玮,刘昭度,王 斌,张 彪(北京理工大学汽车动力性及排放测试国家专业实验室,北京100081)摘 要:基于扫描式激光雷达的基本原理和自适应巡航控制(ACC)系统的工作要求,指出了对激光雷达扫描平面进行定位的目的和意义。
通过对2个点目标和楔形块斜面进行扫描测量,确定了激光雷达扫描透镜即激光探头在光学保护罩内的深度和激光扫描平面的高度,并进行了补充实验对测量结果加以验证,证明测量误差在1c m以内,为确定激光雷达在汽车上的理想安装位置,减小系统误差,避免ACC系统发生误报打下了基础。
关键词:汽车自适应巡航控制;激光雷达;扫描平面;定位中图分类号:U491.6 文献标识码:A 文章编号:1000-9787(2008)02-0019-02O r i en t a ti on to scann i n g pl ane of auto m oti ve ACC radar3HE W ei,L I U Zhao2du,WANG B in,Z HANG B iao(Na ti ona l Labora tory of Auto Perfor mance&E m issi on Test,Be iji n g I n stitute of Technology,Be iji n g100081,Ch i n a)Abstract:The pur pose and the significance of orientati on t o scanning p lane of the aut omotive adap tive cruisecontr ol(ACC)radar are pointed out based on the basic p rinci p le of the scanning laser radar and the workingde mands of the ACC.Thr ough scanning the t w o punctual objects and the inclined p lane of a cuneif or m bl ock,thedep th of scanning tens,that is,the laser p r obe in the op tic p r otecting cover and the height of laser scanning p laneare confir med.The comp le mentary tests p r ove that the err or of the test results above is s maller than1c m,which canhel p t o make sure the ideal installing positi on of the laser radar in the car,reduce the syste m err ors and avoid them isinfor mati on of the ACC system.Key words:aut omotive adap tive cruise contr ol(ACC);laser radar;scanning p lane;orientati on0 引 言激光雷达是汽车自适应巡航控制(adap tive cruise con2 tr ol,ACC)系统的关键部件之一,用来探测前方车道上目标车辆相对于主车的运动状态,使ACC系统及时发出控制指令,保持主车与目标车辆的安全距离。
ACC激光雷达按照工作方式分为单光束激光雷达和扫描式激光雷达[1],单光束激光雷达通过测量单束激光脉冲发射与接收的时间间隔来计算主车与目标车的相对距离,不具备扫描功能,不能获得目标的方位信息,无法全面感知前方道路状况;扫描式激光雷达在单光束雷达的基础上添加了光学器件的扫描驱动装置,如,步进电机、直流电机等,能够对前方道路进行一定角度的横向或纵向的扫描探测,这样,就能全面获取目标车辆的状态信息,使汽车在上下坡以及弯道等各种道路条件下都具有ACC功能,并有效防止系统误报的发生[2]。
一维扫描式激光雷达通过步进电机带动透镜对前方进行扇形扫描(默认设置为180°),扇形中心即为激光透镜中心,扇形半径为该型雷达最大探测距离。
为了准确获得前方目标相对激光雷达的距离和方位角信息,必须确定激光扫描平面在雷达上所处的具体位置,也就是扫描透镜(激光探测头)在雷达保护罩内的深度和扫描平面的高度。
否则,雷达在汽车上的理想安装位置无法确定,同时,在汽车上下坡情况下,由于扫描平面的干涉容易使ACC产生目标距离测量误差、丢失目标以及误报等情况[3]。
由于扫描透镜镜片内嵌在雷达保护罩内,无法确定具体位置,相关文献也难于从国外获得,所以,只能通过测量定位的方法对激光雷达扫描平面进行定位。
1 激光扫描平面定位1.1 扫描透镜深度定位首先,将激光雷达放置在水平平面上,选择2个标杆作为目标物,每个标杆直径D>10mm(雷达横向分辨力),它们可以视为扫描区域内的点目标。
图1为计算扫描透镜在保护罩内深度的俯视示意图,A,B两点为2个待测标杆,收稿日期:2007-07-263基金项目:福特—中国研究与发展基金资助项目(50122155)91 传感器与微系统 第27卷AO,BO 为使用雷达所测的2个目标点相对激光透镜中心的距离,以2个目标点为圆心,以所测距离为半径分别作圆,两圆弧的交点就是透镜中心的位置,也就是扫描平面的顶点O 。
AC,BC 为实际人工测量的两目标点到雷达底座保护罩圆弧中心C 的距离,AB 为两目标点的相对距离,所以,CO 就是扫描透镜在保护罩内的深度,记作d 。
同时,有∠BAC =α,∠BAO =β。
图1 激光雷达扫描透镜中心深度定位F i g 1 Ca li bra ti on to len s cen ter of li dar i n depth 根据三角余弦定理,有cos α=(AB 2+AC 2-BC 2)/(2AB ・AO ),(1)cos β=(AB 2+AO 2-BO 2)/(2AB ・AO ).(2)由于实际测量情况中α,β都是锐角,所以,有sin α=1-cos 2α,(3)sin β=1-cos 2β,(4)cos (β-α)=cos βcos α+sin βsin α.(5)所以,激光扫描透镜距离保护罩圆弧中心的深度d =CO =AC 2+AO 2-2AC ・AO cos (β-α).(6)图2为激光雷达扫描2个目标标杆的测量界面,该界面采用极坐标系,A,B 两目标物坐标为(103,-2.5)和(87,5),表示目标到扫描透镜的距离(单位:c m )和方位角(单位:(°))。
所以,AO =103cm,BO =87cm ,人工实际测得AC =99c m ,BC =81c m ,AB =22c m。
把数据代入式(1)~式(5),联立得到扫描透镜距离保护罩镜面底座中心的深度d =6cm 。
图2 激光雷达扫描目标物体图像F i g 2 Scann i n g i m age of object w ith li dar1.2 扫描平面高度定位使用一个30°的楔形块作为待测目标物,与ACC 激光雷达一起放置在水平平面上,通过激光雷达对楔形块斜面进行横向扫描。
激光呈一个扇形面向前方扫描,激光扇面与楔形块斜面交线到透镜中心的距离l 1可以被雷达测出,楔形块到雷达底座的距离l 2手工测得,所以,扫描透镜距离雷达底边的高度,即扫描平面的高度h 可以通过下式计算h =(l 1-l 2)tg 30°.(7)根据图3的激光雷达扫描图像,楔形斜面距离l 1=100c m ,手工测得l 2=92mm ,所以,经过测算,扫描平面的高度h =4.6c m 。
图3 激光雷达扫描楔形块斜面图像F i g 3 Scann i n g i m age of cune i for m i n cli n e w ith li dar2 补充实验验证激光雷达在扫描中通过对发送和接收的激光脉冲进行计数来测量目标距离,小于1的计数脉冲被舍去,因此,测量结果会出现舍入误差[4],人工测量的实验结果也存在一定的误差,定位计算中也有累积误差,所以,为了进一步验证实验测算结果,对激光透镜深度和扫描平面高度进行了补充实验。
在水平表面距离雷达圆柱保护罩中心94cm 处竖直放置一个平板,使用激光雷达对平板表面进行扫描,如图4所示,扫描结果为100c m,所以,透镜中心距雷达圆弧底坐中心距离即激光探测头深度为100-94=6c m,与上文的实验结果吻合。
图4 平板扫描图像F i g 4 Scann i n g i m age of pl ane board 再验证扫描平面高度,采用的方法是距离雷达圆柱保护罩中心约50c m 处横向水平放置一个细标杆,然后,缓慢地上下移动标杆,移动方向与水平面垂直,反复进行多次,使用激光雷达对其进行扫描,测量扫描扇形面±5°的数据,该数据为目标距离保护罩中心的长度。
如果标杆不与扫描扇面处于同一平面上,测量结果为较远处无意义的目标数(下转第23页)2第2期 邓永和,等:掺杂对WO3基气敏元件敏感特性的影响 酮、丁烷和汽油的灵敏度,对乙醇的灵敏度随A l2O3的添加量而缓慢下降,丙酮、汽油、丁烷的灵敏度在A l2O3的质量分数为4%时达到最大,以后随A l2O3的添加量的增加,元件的灵敏度都下降,从表5可以看出:汽油比乙醇的灵敏度高4倍以上,非常适合在WO3中添加质量分数为4% A l2O3开发汽油敏感元件。
表5 加热功率为600mW时,气体体积分数为10-3时,加入A l2O3的质量分数与元件灵敏度β的关系Tab5 Rel a ti on sh i p between ga s sen sor sen siti v ityβand A l2O3 qua lity fracti on w ith tepefacti on power600mW and ga s volu m efracti on a t10-3气体质量分数(%)2468101214乙醇3.863.783.543.213.062.842.69丙酮11.8213.6511.8710.198.917.635.94汽油19.0321.8420.0118.1416.7215.3213.20丁烷2.272.412.382.302.221.961.783 结 论1)WO3基中加入质量分数为4%的瓷粉制作的旁热式气敏元件在加热功率为600mW时,对丙酮、汽油、乙醇具有很强的敏感性能,对CO,CH4几乎不敏感。